
1. Charakterystyka metod pomiarów kątów (kierunków) poziomych
Definicja – kąt poziomy wyznaczany jest przez ślady przecięcia dwóch płaszczyzn pionowych
przechodzących przez oś celową i obserwowane punkty z poziomą płaszczyzną
limbusa. Płaszczyzny celowania powinny przecinać się wzdłuż prostej
pokrywającej się z osią pionową instrumentu
Metody pomiarów kątowych:
1. Zwykła
2. Repetycyjna
3. Wieloseryjna (jak zwykła, tylko więcej serii)
4. Kierunkowa
1. Metoda zwykła
Po dokładnym ustawieniu teodolitu (Theo 020) nad punktem (stanowiskiem) A musimy
określić w ilu seriach będzie mierzony dany kąt a. Seria jest to pomiar kąta w 2
położeniach lunety, przy czym pierwsze położenie lunety jest wówczas, gdy krąg pionowy
znajduje się po lewej stronie lunety. Określenie liczby serii jest ważne, gdyż w zależności
od tej liczby serii, obliczamy o jaką wartość Os należy zmieniać odczyt początkowy na
limbusie przy rozpoczęciu pomiaru dla każdej serii. Wartość tą obliczamy ze wzoru:
Os = 200 g / n , gdzie n to liczba serii
Czynności pomiarowe na stanowisku:
1. Ustawiamy na limbusie odczyt równy w przybliżeniu 0g i zaciskamy sprzęg repetycyjny.
2. Celujemy na lewe ramię kąta
3. Wykonujemy odczyt z kręgu poziomego Hz i zapisujemy w dzienniku pomiarowym, po czym
zwalniamy sprzęg repetycyjny
4. Poruszamy lekko leniwką poziomą aby siatka celownicza zmieniła swoje położenie a
następnie ponownie celujemy leniwką poziomą na nasz punkt, po czym wykonujemy drugi
odczyt z kręgu poziomego Hz
5. Celujemy na prawe ramię kąta i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4. W ten sposób wykonaliśmy pomiar kąta w I położeniu lunety
6. Teraz wykonujemy pomiar kąta w II położeniu lunety. Obracamy lunetę przez zenit (wokół
własnej poziomej osi obrotu), alidadę obracamy o 1800 i celujemy na prawe ramię kąta
wykonując odczyt z kręgu poziomego Hz. Wykonujemy czynności jak w punkcie 4
7. Celujemy na lewę ramię kąta i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
8. Wykonujemy te same czynności co punktach 1-7 w drugiej serii pomiaru kąta z wyjątkiem
ustawienia innej wartości odczytu na limbusie przy pierwszym wycelowaniu na lewe ramię
kąta (wzór).
2. Metoda kierunkowa
Czynności pomiarowe na stanowisku:
1. Ustawiamy na limbusie odczyt równy w przybliżeniu 0g i zaciskamy sprzęg repetycyjny.
2. Celujemy na pierwszy kierunek
3. Wykonujemy odczyt z kręgu poziomego Hz i zapisujemy w dzienniku pomiarowym, po czym
zwalniamy sprzęg repetycyjny
4. Poruszamy lekko leniwką poziomą aby siatka celownicza zmieniła swoje położenie a
następnie ponownie celujemy leniwką poziomą na nasz kierunek, po czym wykonujemy drugi

odczyt z kręgu poziomego Hz
5. Celujemy na drugi kierunek i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4.
6. Celujemy na trzeci kierunek i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4.
7. Celujemy na czwarty kierunek i wykonujemy odczyt z kręgu poziomego. Wykonujemy
czynności jak w punkcie 4.
8. Celujemy ponownie na pierwszy kierunek (tzw. zamknięcie horyzontu) i wykonujemy odczyt
z kręgu poziomego. Wykonujemy czynności jak w punkcie 4. W ten sposób wykonaliśmy
pomiar kierunków w I położeniu lunety
9. Teraz wykonujemy pomiar kierunków w II położeniu lunety. Obracamy lunetę przez zenit
(wokół własnej poziomej osi obrotu), alidadę obracamy o 200 g i celujemy na pierwszy
kierunek wykonując odczyt z kręgu poziomego Hz. Wykonujemy czynności jak w punkcie 4
10. Celujemy na czwarty kierunek i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
11. Celujemy na trzeci kierunek i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
12. Celujemy na drugi kierunek i wykonujemy odczyt. Wykonujemy czynności jak w punkcie 4
13. Celujemy na pierwszy kierunek (tzw. zamknięcie horyzontu) i wykonujemy odczyt.
Wykonujemy czynności jak w punkcie 4
14. Wykonujemy te same czynności co punktach 1-13 w drugiej serii pomiaru kierunków z
wyjątkiem ustawienia innej wartości odczytu na limbusie przy pierwszym wycelowaniu na
pierwszy kierunek (wzór).
Poprawka kątowa w metodzie kierunkowej:
Vk = -fk / n , gdzie:
fk - odchyłka niezamknięcia horyzontu, n - liczba kierunków.
Do kierunku pierwszego dodajemy wartość poprawki Vk, do drugiego 2*Vk itd.
3. Metoda wieloseryjna
Polega na kilkakrotnym pomiarze kąta w obu położeniach lunety
przy niezależnych odczytach kierunków i wycelowaniach a także niezależnym centrowaniu i
poziomowaniu przy każdej serii.
4. Metoda repetycyjna
OL' = średnia wartość odczytu na lewym ramieniu kąta
OP'' = średnia wartość odczytu na prawym ramieniu kąta
n = ilość repetycji
m = liczba pełnych obrotów limbusa, ze wzoru: m = (n*alfa)/400, gdzie alfa jest to kąt przybliżony
wzór na ostateczną wartość kąta alfa:
alfa = (OP'' – OL' + m*400)/(2n)
Czynności pomiarowe na stanowisku:
1. Ustawiamy na limbusie odczyt równy w przybliżeniu 0g i zaciskamy sprzęg repetycyjny.
2. Celujemy na lewe ramię kąta
3. Wykonujemy odczyt z kręgu poziomego Hz i zapisujemy w dzienniku pomiarowym, po czym
zwalniamy sprzęg repetycyjny
4. Poruszamy lekko leniwką poziomą aby siatka celownicza zmieniła swoje położenie a

następnie ponownie celujemy leniwką poziomą na nasz punkt, po czym wykonujemy drugi
odczyt z kręgu poziomego Hz
5. Celujemy na prawe ramię kąta i wykonujemy tzw. odczyt przybliżony z kręgu poziomego
zapisując jego wartość w dzienniku pomiarowym. Wykonujemy czynności jak w punkcie 4.
Zaciskamy sprzęg reptycyjny
6. Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
7. Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny
8. Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
9. Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny.
W ten sposób odłożyliśmy trzykrotnie tą samą wartość kąta na limbusie a więc dokonaliśmy
trzech repetycji w I położeniu lunety
10. Obracamy lunetę przez zenit i celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu
repetycyjnym) – nie dokonujemy odczytu
11. Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny
12. Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
13. Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Zaciskamy sprzęg reptycyjny
14. Celujemy na lewe ramię kąta (przy zaciśniętym sprzęgu repetycyjnym)
15. Zwalniamy sprzęg repetycyjny i celujemy na prawe ramię kąta. Dokonujemy odczytu z kręgu
poziomego. W ten sposób odłożyliśmy trzykrotnie tą samą wartość kąta na limbusie w II
położeniu lunety
WNIOSKI
- W metodzie repetycyjnej w stosunku do zwykłej występuje znaczne zmniejszenie błędu
odczytywania - błąd ten jest mniejszy n razy
- W metodzie repetycyjnej w stosunku do zwykłej następuje zmniejszenie błędu celowania o n
- W metodzie wieloseryjnej pomiaru pojedynczego kąta występuje s krotne zmniejszenie
błędów: celowania, odczytywania i centrowania, wynikające z wielokrotności pomiarów
- W metodzie repetycyjnej wpływ błędu centrowania na średni błąd pomiaru kąta jest taki
sam jak w metodzie zwykłej a w wieloseryjnej s razy mniejszy.

2. Przyrządy do pomiarów kątowych ( ale o co chodzi?! )
Teodolity to instrumenty geodezyjne wykorzystywane do pomiarów kątów poziomych i pionowych.
Obecnie najczęściej wykorzystuje sięw pomiarach teodolity (tachimetry Total Station) z
elektronicznym systemem pomiarowym, rejestrujące wartości kierunków poziomych czy
pionowych w sposób ciągły.
Obstawiam, że może pojawić się pytanie o budowę teodolitu, więc wrzucam:
LIBELE – urządzenia do poziomowania.
Zasada działania: układanie się swobodnej powierzchni cieczy (gazowy pęcherzyk swej pary) w
poziomie w zamkniętym naczyniu (ampułce) z właściwie wyszlifowaną krzywizną.
Zastosowanie: poziomowanie prostych lub płaszczyzn
Podział: rurkowe (podłużne), pudełkowe (okrągłe,sferyczne)
Libela rurkowa posiada ampułkę w kształcie walcowatej rurki z wyszlifowaną krzywizną
wewnętrzną. Na zewnętrznej powierzchni rurki jest naniesiony podział a jej środek nazywamy
punktem głównym G libeli rurkowej.
Czułość (wrażliwość) libeli– zdolność reagowania pęcherzyka na nachylenie. Parametr decydujący
o czułości libeli to tzw. przewaga libeli
Przewaga libeli– kąt środkowy zawarty między promieniami krzywizny łączącymi dwie sąsiednie
kreski podziału. Wyraża jąstosunek długości działki d i promienia krzywizny
Dokładność libel okrągłych jest stosunkowo niska. Stosuje się je zazwyczaj do pionowania łat,
tyczek sygnałów celowniczych itp.
Węgielnica
W geodezji węgielnica służy do wytyczania kątów prostych, pełnych i półpełnych. Są dwa rodzaje
węgielnic – przeziernikowe i optyczne. Optyczne zapewniają dokładność.
Węgielnica pryzmatyczna– urządzenie geodezyjne stosowane również w archeologii. Zbudowane
jest z dwóch umieszczonych jeden nad drugim pryzmatów oraz okienka pomiędzy nimi. Pryzmaty
umożliwiają patrzenie pod kątem prostym na prawo i lewo. U dołu węgielnicy podwieszany jest
pion ułatwiający poprawne ustawienie urządzenia.
Węgielnica pryzmatyczna służy do wykonywania prostych pomiarów sytuacyjnych metodą
ortogonalną – rzutowania danych punktów na prostą a także do szybkiego wytyczania kątów
prostych

3. Sprawdzenie i rektyfikacja teodolitu z jednomiejscowym systemem
odczytowym
Każdy geodeta przed wykonaniem pomiarów powinien sprawdzić czy teodolit jest
wolny od błędów instrumentalnych. Sprawdzenie to jest podzielone na trzy etapy i obejmuje:
1. Sprawdzenie elementów mechanicznych
2. Sprawdzenie elementów optycznych
3. Sprawdzenie warunków geometrycznych (osiowych).
Sprawdzenie elementów mechanicznych zaczynamy od oględzin statywu. Należy
upewnić się czy nogi statywu wysuwają się w sposób płynny, czy śruby motylkowe poruszają
się w sposób płynny w całym swym zakresie, czy części drewniane i metalowe są dobrze ze
sobą połączone (czy nie ma zbyt dużych luzów)
Następnie przystępujemy do oględzin spodarki. Należy odłączyć górną część teodolitu
od spodarki i trzymając spodarkę w ręku, lekko nią potrząsnąć. Wówczas płytka sprężynująca
powinna wydać dźwięk zbliżony do stukania.
Poza tym sprawdzamy śruby poziomujące, które powinny obracać się ruchem
swobodnym w całym swym zakresie. Takim samym ruchem powinna się także charakteryzować
alidada.
Kolejną czynnością jest sprawdzenie libeli alidadowej i okrągłej. Konieczne tu jest
zwrócenie uwagi na stan elementów szklanych, w których znajduje się pęcherzyk libeli i
stwierdzenie czy nie ma pęknięć, czy wygrawerowane elementy na powierzchni libel są
widoczne.
Następnie sprawdzamy leniwki alidadową i lunety czy obracają się w całym swym
zakresie ruchem płynnym oraz czy zaciski odpowiednio alidady i lunety działają poprawnie
(unieruchamiają alidadę względem spodarki i lunetę).
Należy również dokonać dokładnych obserwacji na lunecie. Sprawdzić czy obraca się
ona wokół własnej poziomej osi obrotu w sposób płynny, czy na okularze i obiektywie nie ma
pęknięć, czy okular lunety i pokrętło ogniskujące również obracają się swobodnie.
Na koniec sprawdzamy czy nie ma uszkodzeń mechanicznych na lusterku, pionie
optycznym czy lunetce systemu odczytowego. Sprawdzamy tu zarówno płynność obrotów
okularów pionu i lunetki a także czy nie ma pęknięć na wszystkich w/w elementach.
W przypadku stwierdzenia nieprawidłowości w jakimkolwiek z w/w elementów
należy przy użyciu własnych środków w terenie dokonać napraw. Jeśli są to naprawy
przekraczające wymagające warunków i sprzętu specjalistycznego, należy oddać sprzęt do
warsztatu, gdzie zedrą z nas gruby hajs.
Sprawdzenie elementów optycznych dokonujemy przede wszystkim na takich
częściach teodolitu jak: luneta, lunetka systemu odczytowego, pion optyczny. Spoglądając do
tych elementów należy określić czy nie są widoczne w polu widzenia zanieczyszczenia
różnego pochodzenia (pyłki kurzu), krople nieokreślonej cieczy, tłuste plamy i inne. W
przypadku gdy uniemożliwiają one wykonanie prawidłowych pomiarów, instrument powinien
zostać oddany do warsztatu naprawczego w celu usunięcia usterek, gdzie zedrą z nas gruby hajs.
Sprawdzenie warunków geometrycznych poprzedzone jest sprawdzeniem kilku
błędów jakie można napotkać przy wykonywaniu odczytów z lunetki systemu odczytowego.
Do zasadniczych należą błąd paralaksy i błąd runu.

Błąd paralaksy
Definicja:
Występuje wówczas jeśli obraz kresek limbusa nie leży w płaszczyźnie skali.
Wówczas obraz kresek limbusa i skali obserwowany równocześnie nie są jednakowo ostre.
Wykrywanie:
Okularem lunetki systemu odczytowego nastawiamy na ostrość skali oczekując
jednakowej ostrości kresek limbusa. Jeśli po ustawieniu ostrości skali, kreski limbusa nie są
tak samo ostre, oznacza to występowanie błędu paralaksy.
Rektyfikacja:
Usuwa się błąd za pomocą soczewki p - znajdującej się w obiektywie kręgu
poziomego - zlokalizowanej bliżej miejsca przebicia kręgu poziomego przez promień
świetlny.
Błąd runu
Definicja:
Występuje wówczas jeśli zakres jednej działki kresek limbusa nie jest równy
zakresowi skali.
Wykrywanie:
Ustawiamy lewą kreskę limbusa na wartości zerowej („0”) skali oczekując pokrycia
prawej kreski limbusa na wartości dziesiątej („10”) skali. Drugim sposobem może być
wykrycie błędu runu poprzez tzw. bisekcję. Jeśli skala jest zaopatrzona w dodatkowe
interwały po obu stronach, to należy ustawić lewą kreskę limbusa w środku pierwszego
dodatkowego interwału przy zerze („0”) skali – bisekcja – oczekując takiego samego
pokrycia na końcu skali. Druga metoda jest dokładniejsza.
Rektyfikacja:
Usuwa się błąd za pomocą soczewki r - znajdującej się w obiektywie kręgu
poziomego - zlokalizowanej dalej od miejsca przebicia kręgu poziomego przez promień
świetlny.
Dopiero teraz gdy instrument jest wolny od wszystkich mechanicznych i optycznych
wad, możemy przystąpić do sprawdzenia warunków geometrycznych teodolitu. Ponieważ
są to warunki osiowe instrumentu, należy dokładnie poznać kilka zasadniczych elementów
osiowych teodolitu.
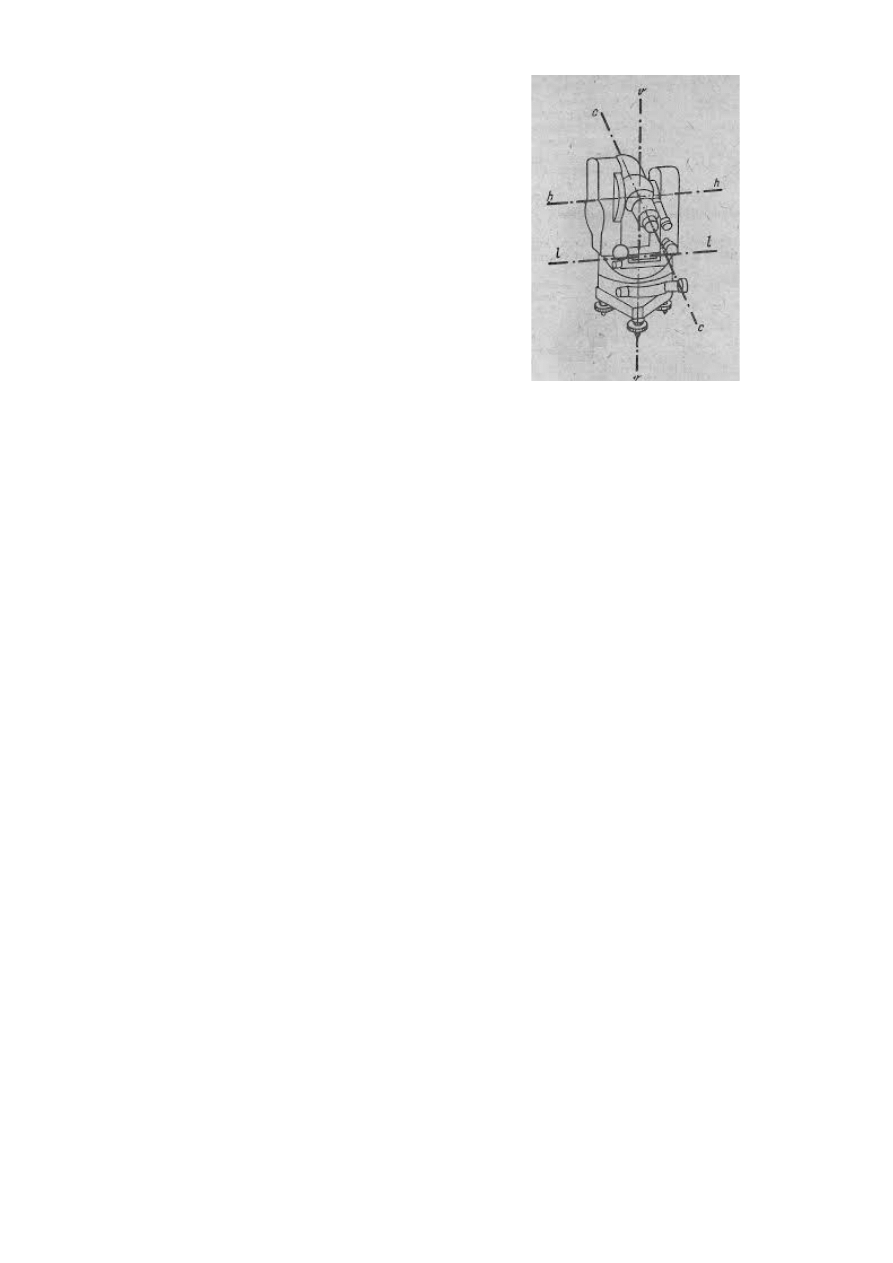
Oto i Teodolit --------->
Na podstawie rysuneczka widzimy, że w teodolitach wyróżniamy oś główną v-v, oś celową
c-c, oś obrotu lunety h-h, oś libeli l-l. Znając ich wzajemne usytuowanie w konstrukcji
teodolitów możemy rozpocząć omawianie warunków geometrycznych. Należą do nich:
1. Warunek libeli
2. Warunek siatki kresek
3. Warunek pionu optycznego
4. Warunek kolimacji
5. Warunek inklinacji
6. Warunek miejsca zero
7. Warunek mimośrodu kręgu poziomego
8. Warunek mimośrodu kręgu pionowego
Każdy z w/w warunków ma określoną definicję, której niespełnienie oznacza
występowanie w teodolicie błędu. Poniżej zostanie omówiona polowa metoda wykrywania i
rektyfikacji błędów osiowych instrumentu.
Błąd libeli
Definicja:
Oś libeli alidadowych lub płaszczyzny poziome styczne w punkcie głównym libeli
powinny być prostopadłe do osi głównej instrumentu.
Wykrywanie:
Zaczynamy sprawdzenie warunku od libeli alidadowej (rurkowej). W pierwszej
kolejności poziomujemy instrument (doprowadzamy pęcherzyk do górowania) przy pomocy
libeli okrągłej za pomocą nóg statywu. Teraz ustawiamy libelę rurkową równolegle do dwóch
śrub poziomujących i kręcimy tymi śrubami równocześnie w przeciwnych
kierunkach do momentu aż pęcherzyk powietrza zajmie położenie środkowe. Obracamy
alidadę o 90 stopni i przy pomocy trzeciej śruby poziomującej doprowadzamy
pęcherzyk ponownie do górowania. Teraz obracamy alidadę z powrotem o 90 stopni (wracamy do
stanu pierwotnego, czyli równoległego do dwóch śrub ustawczych) i sprawdzamy
czy pęcherzyk nie wyszedł z górowania. Jeśli tak, ale w niewielkim zakresie, to poprawiamy
poziom instrumentu za pomocą tych samych dwóch śrub ustawczych. Teraz obracamy
alidadę o 180 stopni i sprawdzamy położenie pęcherzyka. Jeżeli wyjdzie z górowania to mamy do
czynienia z błędem libeli, co nas na pewno nie ucieszy.

Rektyfikacja:
Rektyfikacja polega na usunięciu połowy błędu libeli za pomocą śrub poziomujących a
drugą połowę przy pomocy śrubek rektyfikacyjnych. Po zrektyfikowaniu libeli alidadowej należy
sprawdzić czy libela okrągła jest w górowaniu. Jeżeli pęcherzyk w libeli sferycznej nie jest w
punkcie głównym to cały błąd usuwamy za pomocą śrubek rektyfikacyjnych libeli okrągłej.
Błąd siatki kresek (krzyża nitek)
Definicja:
Pozioma oś siatki kresek powinna być prostopadła do osi głównej instrumentu.
Wykrywanie:
Przy bezwietrznej pogodzie zawieszamy na gałęzi drzewa pion sznurkowy w taki
sposób aby jego koniec znajdował się poniżej wysokości osi celowej teodolitu. Następnie
celujemy na zwisający swobodnie pion sznurkowy i obserwujemy położenie krzyża nitek
względem pionu sznurkowego. Jeżeli na całej długości pionowej kreski krzyża nitek nie
występuje pokrycie z pionem sznurkowym wówczas mamy do czynienia z błędem siatki
kresek.
Innym sposobem może być zaznaczenie na ścianie budynku znaku (np. krzyżyk) i
wycelowanie początkiem (z lewej strony) poziomej kreski siatki celowniczej. Teraz za
pomocą leniwki alidady przesuwamy krzyż nitek w płaszczyźnie poziomej obserwując cały czas
czy kreska pozioma siatki na całej swej długości pokrywa się ze znakiem (krzyżykiem).
Jeżeli nie, wówczas mamy do czynienia z błędem siatki kresek.
Rektyfikacja:
Należy zdjąć osłonę okularu lunety, zwolnić śrubki sprzęgające obudowę
płytki ogniskowej z tubusem lunety i za pomocą śrubek rektyfikacyjnych płytki
ogniskowej usunąć skręcenie krzyża kresek.
Błąd pionu optycznego
Definicja:
Pionowa część osi celowej pionu optycznego powinna pokrywać się z osią główną
instrumentu i przy obrocie alidady o 360 stopni przebijać dowolną płaszczyznę prostopadłą do osi
pionownika w jednym punkcie.
Wykrywanie:
Na białej kartce papieru kreślimy znak, nad którym to centrujemy instrument. Następnie obracamy
alidadę o 180 stopni i sprawdzamy czy znaczek centrujący znajduje się nadal nad naszym znakiem.
Jeśli nie, to mamy do czynienia z błędem pionu optycznego.
Rektyfikacja:
Na kartce zaznaczamy teraz drugie położenie znaczka centrującego otrzymując odcinek S1-
S2. Wyznaczamy środek tego odcinka uzyskując punkt S3. Teraz za
pomocą śrubek rektyfikacyjnych pionu optycznego przesuwamy znaczek centrujący na środek
odcinka S1-S2, czyli na punkt S3.

Błąd kolimacji
Definicja:
Oś celowa lunety powinna być prostopadła do poziomej osi obrotu lunety.
Niespełnienie tego warunku powoduje, że oś celowa zamiast płaszczyzny zatacza pobocznicę
stożka. Dla dwóch położeń lunety stożki te są symetryczne i stykają się ze sobą w
punkcie przecięcia się osi głównej v-v z osią obrotu lunety h-h. Można więc ten błąd
eliminować w terenie przez pomiar kąta w dwóch położeniach lunety.
Wykrywanie:
Na wysokości osi celowej obieramy dowolny punkt (znaczymy krzyżykiem) na
ścianie budynku. Celujemy na ten punkt w dwóch położeniach lunety dokonując za każdym
razem odczytu z kręgu poziomego. Różnica dwukrotnego odczytu powinna wynosić 180 stopni.
.
Nadmiar lub niedobór tej różnicy od 180 stopni jest podwójnym błędem kolimacji.
Pomiar:
O1 - odczyt z limbusa w I położeniu lunety
O2 - odczyt z limbusa w II położeniu lunety
K ’’ (błąd kolimacji) = (O2 – O1 – 200 grad)/2
Rektyfikacja:
Obliczamy teraz odczyty poprawione:
O1 + K
O2 – K
a następnie za pomocą leniwki alidady nastawiamy w lunetce systemu odczytowego
właściwy, poprawiony odczyt (O2-K). Ponieważ poruszaliśmy przy tym leniwką alidady,
siatka celownicza zostanie przesunięta i nie będzie znajdowała się teraz na naszym punkcie
(krzyżyku). Dlatego też zdejmujemy osłonę okularu lunety i tak jak przy rektyfikacji siatki
kresek przesuwamy za pomocą śrubek rektyfikacyjnych krzyż nitek na nasz punkt (krzyżyk).
Błąd inklinacji
Definicja:
Pozioma oś obrotu lunety powinna być prostopadła do osi głównej instrumentu.
Wykrywanie:
Wybieramy dowolny punkt P na pewnej wysokości (np. dach budynku –rys. 5) a pod
tym punktem, na wysokości osi celowej ustawiamy liniał (łata, linijka). Celujemy do punktu
P, unieruchamiamy alidadę względem spodarki (zacisk alidady) a następnie opuszczamy
lunetę na wysokość osi celowej w kierunku naszego liniału. Czynność tą powtarzamy w
drugim położeniu lunety, za każdym razem dokonując odczytu z liniału. Jeżeli odczyty z I-O1
i II-O2 położenia lunety są różne (różnią się od siebie o +/- 1-2mm) to różnica ta jest
podwójnym błędem inklinacji.

Pomiar:
O1 = 26.2 mm - odczyt z liniału w I położeniu lunety
O2 = 31.4 mm - odczyt z liniału w II położeniu lunety
I = (O2 – O1)/2 = 2,6 mm, czyli błąd inklinacji
Rektyfikacja:
Rektyfikacja błędu inklinacji polega na zmianie położenia poziomej osi obrotu lunety
przez właściwe przesunięcie łożyska, w których to luneta jest osadzona, tzn. tak aby uzyskać
odczyt średni Os.
Błąd miejsca zero (błąd indeksu)
Definicja:
Przy poziomym położeniu osi celowej, odczyt z kręgu pionowego powinien wynosić
90 lub 270 stopni.
Wykrywanie:
W pewnej odległości od stanowiska, na wysokości osi celowej zaznaczamy punkt (np.
krzyżyk na ścianie budynku). Celujemy do tego punktu w dwóch położeniach lunety
dokonując za każdym razem odczytu z kręgu pionowego. Suma odczytów z I i II położenia
lunety powinna wynosić 360 stopni. Nadmiar lub niedobór od tej sumy jest podwójnym błędem
indeksu.
Pomiar:
O1 - odczyt z kręgu pionowego w I położeniu lunety
O2 - odczyt z kręgu pionowego w II położeniu lunety
Z = błąd indeksu (miejsca zero) = [(O1 + O2) – 360 stopni ] / 2
Rektyfikacja:
Obliczamy teraz odczyty poprawione:
O1 – Z
O2 - Z
a następnie za pomocą leniwki lunety nastawiamy w lunetce systemu odczytowego właściwy,
poprawiony odczyt (O2-Z). Ponieważ poruszaliśmy przy tym leniwką lunety, siatka
celownicza zostanie przesunięta i nie będzie znajdowała się teraz na naszym punkcie
(krzyżyku). Dlatego też zdejmujemy osłonę okularu lunety i tak jak przy rektyfikacji siatki
kresek przesuwamy za pomocą śrubek rektyfikacyjnych krzyż nitek na nasz punkt (krzyżyk).
Mimośród kręgu poziomego
Definicja:
Oś główna instrumentu powinna przechodzić przez środek geometryczny limbusa.

Wykrywanie:
Wykrycie tego błędu polega na wyznaczeniu błędu kolimacji w kilku równo
rozmieszczonych miejscach kręgu poziomego. Na podstawie dodatkowych pomiarów
określamy także błąd celowania i odczytu, z których to wyliczamy błąd operacji pomiarowej
a na końcu błąd graniczny. W efekcie końcowym sporządzamy wykres obliczonych błędów
kolimacji dla poszczególnych podziałów kręgu poziomego i porównujemy czy łamana na
wykresie nie przekracza wartości błędu granicznego. Jeżeli przekracza, oraz wykres ma
zbliżony kształt do sinusoidy, to mówimy o mimośrodzie kręgu poziomego.
Pomiar:
W pewnej odległości od stanowiska obieramy sobie dowolny punkt w przybliżeniu na
wysokości osi celowej instrumentu (np. krzyżyk na ścianie budynku). Ponieważ będziemy
wyznaczać błąd kolimacji na 10 równych częściach podziału kręgu poziomego (a więc co
40g), wykorzystujemy sprzęg repetycyjny do ustawienia odczytu w pobliżu 0g. Po
wycelowaniu na punkt (przy zaciśniętym sprzęgu repetycyjnym) wykonujemy odczyt O1 z
kręgu poziomego, zwalniamy sprzęg repetycyjny i wykonujemy ponowny odczyt O2 w II
położeniu lunety. W ten sposób wyznaczymy pierwszy błąd kolimacji przy podziale limbusa w
okolicach 0g. Powtarzamy czynności za każdym razem zmieniając początkowy odczyt co
40g.
DALSZA PROCEDURA DOSYĆ SKOMPLIKOWANA, NIE SĄDZĘ ŻE SIĘ POJAWI, NO ALE
DLA CHĘTNYCH POLECAM OD STRONY 11:
http://home.agh.edu.pl/~rkrzyzek/zagadnienia/zagadnienie%205.pdf

4. Układy współrzędnych prostokątnych stosowane w Polsce
Ponieważ posługiwanie się współrzędnymi geograficznymi byłoby zbyt uciążliwe, zaistniała
potrzeba dokładnego wyznaczania punktów na mapie za pomocą współrzędnych prostokątnych
płaskich.
Współrzędne prostokątne płaskie określone są w miarach liniowych. W tym wypadku znając
współrzędne prostokątne płaskie dwóch punktów, można łatwo obliczyć odległość między nimi
oraz azymut wyznaczonego przez te punkty kierunku z pomocą wzorów z geometrii analitycznej
płaskiej.
W celu naniesienia siatki współrzędnych prostokątnych w przyjętym odwzorowaniu przyjmuje się
za zwyczaj prostoliniowy obraz południka osiowego (środkowego) za oś x układu współrzędnych,
zaś prostą prostopadłą do tego południka w określonym punkcie za oś y. Orientację układu
współrzędnych prostokątnych przyjmujemy zgodną z ruchem wskazówki zegara. Na tych dwóch
osiach układa się odcinki, jedno- lub wielokilometrowe, przez które przeprowadza się proste
równoległe do osi. W ten sposób powstaje siatka współrzędnych prostokątnych, którą nazywamy
zwykle siatka kilometrową, ponieważ tworzące ja linie są od siebie wzajemnie oddalone o pełną
liczbę kilometrów w skali mapy.
Na podstawie siatki kilometrowej można bardzo łatwo wyznaczyć współrzędne prostokątne (x, y)
dowolnego punktu. W celu uniknięcia liczb względnych przy oznaczaniu punktów za pomocą
współrzędnych przyjmuje się zazwyczaj dla punktu początkowego układu zamiast x=0 pewne
dostatecznie duże liczby dodatnie tak, aby dla określonego obszaru nie było współrzędnych
ujemnych. Najczęściej stosuje się następujące rodzaje odwzorowania płaskiego w celu uzyskania
układów współrzędnych prostokątnych: Gaussa-Krugera i quasi-stereograficzne WIG.
UKŁAD WSPÓŁRZĘDNYCH BOROWA GÓRA (1920 R)
Opracowany przez Wojskowy Instytut Geograficzny (WIG) w 1936 roku. Obowiązywał do lat 50-
tych, do momentu wprowadzenia układu "1942".
Najważniejsze cechy:
elipsoida: Bessela
punkt przyłożenia: Borowa Góra (B = 52°28'32.85'', L = 21°02'12.12'')
azymut orientacji: Borowa Góra - Modlin (A = 261°53'15.90'')
odwzorowanie: Roussilhe'a
skala m0 = 1
pięć 2-stopniowych pasów odwzorowawczych dla południków: 17° , 19° , 21° ,23° ,25°
X = x - 5 280 000 m, Y = y + 90 000 m
Modyfikacja odwzorowania z 1920 r
cztery 3-stopniowe pasy odwzorowawcze dla południków środkowych 15°, 18°, 21°, 24°
skala m0 = 0.999935
X = x, Y = y + (5 500 000, 6 500 000, 7 500 000, 8 500 000) m
od roku 1949 skala m0 = 1
Do sporządzania map topograficznych dla obszaru Polski w układzie "Borowa Góra" zastosowane
zostało przez WIG odwzorowanie M.H. Roussilhe`a. Jest to siatka azymutalna równokątna,
uwzględniająca elipsoidalny kształt Ziemi. Odwzorowanie to zostało zmodyfikowane dla lepszego
przystosowania jego do wielkości i kształtu Polski, a więc jest to siatka quasi-stereograficzna.
Celem uniknięcia dużych zniekształceń, zastosowano tu płaszczyznę sieczną przecinającą elipsoidę
wzdłuż elipsy zbliżonej do okręgu koła o promieniu około 284 km od punktu głównego.
W odwzorowaniu Roussilhe`a opracowano w okresie międzywojennym mapę w podziałce
1:100 000 ponadto projektowano wykonanie mapy Polski w skali 1:50 000 oraz w skali 1:25 000.
Do wojny wykonano jedynie jeden arkusz mapy 1:50 000, a mianowicie arkusz Toruń oraz szereg
arkuszy map 1:25 000.

Na mapie Polski w podziałce 1:100 000 w odwzorowaniu quasi-stereograficznym Roussilhe`a
zniekształcenia odległości nie przekraczają 17% a więc do celów praktycznych odległości były
wystarczająco dokładne.
W większości państw przyjęto oznaczanie map według pasów i słupów. Oznaczanie położenia
mapy za pomocą pasów równoleżnikowych i słupów południkowych jest bardzo dogodne, bo
pozwala na zwiększenie zasięgu mapy wieloarkuszowej w każdym kierunku. Pasy liczy się
przeważnie z północy na południe, słupy zaś z zachodu na wschód.
W polskich mapach słupy i pasy oznaczono cyframi arabskimi. Podstawową mapą podziału była
mapa 1:100 000. Pasy ciągną się w kierunku równoleżnikowym i ponumerowane są w kolejności
liczb od 29 na północy kraju do 52 na południu. Słupy przebiegają zgodnie z południkami i
ponumerowane są od 18 na zachodzie kraju do 38 na wschodzie.
UKŁAD WSPÓŁRZĘDNYCH 1942 (1952 R)
Wprowadzony na podstawie uchwały Prezydium Rządu w 1953 r. w sprawie założenia jednolitej
państwowej sieci geodezyjnej i opracowania mapy podstawowej państwa. Uchwała ta
zobowiązywała do opracowania i wydania mapy topograficznej w skali 1:25 000 (mapa ta została
wykonana dla całego kraju w ciągu 6 lat). Kolejna uchwała Prezydium Rządu, podjęta w 1955 r.,
zobowiązywała do opracowania mapy topograficznej w skali 1:10 000.
Najważniejsze cechy:
elipsoida: Krasowskiego
punkt przyłożenia: Pułkowo (B = 59°46'18.55'', L = 30°19'42.09'')
azymut orientacji: Pułkowo - Bugry (A = 121°40'38.79'')
odwzorowanie: Gaussa-Krügera
dwa 6-stopniowe pasy odwzorowawcze dla południków 15°, 21°
skala m0 = 1
X = x, Y = y + (3 500 000, 4 500 000) m
cztery 3-stopniowe pasy odwzorowawcze dla południków środkowych 15°, 18°, 21°, 24°
X = x, Y = y + (5 500 000, 6 500 000, 7 500 000, 8 500 000) m
Przy pomiarach wysokościowych przyjmujemy geoidę Kronsztadzką (teoretyczny poziom Morza
Bałtyckiego w Kronsztadzie).
W państwowym układzie współrzędnych płaskich prostokątnych "1942" opracowane zostały mapy
topograficzne w skalach 1:25 000, 1:50 000, 1:100 000, 1:200 000, 1:500 000.
Mapy te sporządzone są w odwzorowaniu Gaussa-Krügera. Jest to równokątne poprzeczne
odwzorowanie elipsoidy obrotowej na pobocznice walca, przy czym środkowy południk obszaru,
zwany też południkiem osiowym, odtwarza się wiernie.
Układ ten obejmował dwa podsystemy
a) Odwzorowanie w pasach południkowych o szerokości 6°. W wyniku tego na obszarze Polski
powstały dwie strefy odwzorowawcze : z południkami środkowymi 15° i 21° ; nazywamy je
pomocniczo: 1942/15 (6) i 1942/21 (6). Odwzorowanie to miało zastosowanie dla map średnio- i
małoskalowych (skale mniejsze od 1:5000). Zniekształcenia odwzorowawcze zmieniały się od 0 (na
południku środkowym każdej strefy) do ok. +59 cm/km (na brzegach strefy).
b) Odwzorowanie w pasach południkowych o szerokości 3°. W wyniku tego na obszarze Polski
powstały cztery strefy odwzorowawcze: z południkami środkowymi 15°,18°,21°,24°; oznaczamy je
pomocniczo: 1942/15 (3), 1942/18 (3), 1942/21 (3), 1942/24 (3). Odwzorowanie to miało
zastosowanie dla map wielkoskalowych (skala 1:5000 i większe). Zniekształcenia odwzorowawcze
na brzegach stref dochodziły do +15 cm/km.
Mapy topograficzne sporządzone w układzie współrzędnych płaskich prostokątnych 1942 mają
siatkę kartograficzną i siatkę kilometrową. Arkusze map topograficznych są sporządzane w podziale
na sekcje trapezowo-elipsoidalne, przy czym linie podziału pokrywają się z obrazami
równoleżników i południków.
UKŁAD WSPÓŁRZĘDNYCH 1965 (1965 R)
Układ współrzędnych "1965" wprowadzony został do opracowań kartograficznych przeznaczonych
dla potrzeb gospodarczych w roku 1968. Decyzja Prezydium Rządu z 1970 r. zobowiązywała do
wymiany map wykonanych uprzednio w innych odwzorowaniach i układach współrzędnych (np.
mapy topograficzne w skali 1:10 000 do roku 1970 opracowywane były w układzie współrzędnych
"1942") na mapy w układzie "1965" oraz wykonanie dla całego obszaru kraju prac kartograficznych
umożliwiających udostępnienie map użytkownikom.
Rozporządzeniem Rady Ministrów z dnia 8 sierpnia 2000 r. w sprawie państwowego systemu
odniesień przestrzennych układ "1965", oraz lokalne układy współrzędnych mogą być stosowane
do dnia 31 grudnia 2009 r.
Najważniejsze cechy:
elipsoida: Krasowskiego
punkt przyłożenia: Pułkowo (B = 59°46'18.55'', L = 30°19'42.09'')
azymut orientacji: Pułkowo - Bugry (A = 121°40'38.79'')
5 stref odwzorowawczych:
w strefach I - IV odwzorowanie quasi-stereograficzne (Roussilhe'a),
w strefie V odwzorowanie Gaussa-Krügera
w strefach I - IV skala m0 = 0.9998, r0 = 178.7 km
strefa I
punkt główny: B = 50°37.5, L = 21°05.0;
X0 = 5 467 000, Y0 = 4 637 000 (lubelskie, łódzkie, kieleckie, rzeszowskie, krakowskie)
strefa II
punkt główny: B = 52°55,0, L = 21°30,0;
X0 = 5 806 000, Y0 = 4 603 000 (olsztyńskie, białostockie, warszawskie)
strefa III
punkt główny: B = 53°30,0, L = 17°02,5;
X0 = 5 999 000, Y0 = 3 501 000 (szczecińskie, koszalińskie, gdańskie, bydgoskie)
strefa IV
punkt główny: B = 51°32.5, L = 16°40.0;
X0 = 5 627 000, Y0 = 3 703 000 (poznańskie, zielonogórskie, wrocławskie, opolskie)
strefa V (G-K)
jeden pas odwzorowawczy L0 = 18°57.5 (katowickie)
skala m0 = 0.999983
X = x - 4 700 000 m, Y = y + 237 000 m
Rys.3. Podział Układu "1965" na strefy.
Mapy sporządzone w państwowym układzie współrzędnych płaskich prostokątnych "1965" nie
posiadają siatki kartograficznej. Sporządzone są one w prostokątnym podziale arkuszowym. Linie
siatki współrzędnych płaskich prostokątnych prowadzonych w odstępach:
dla mapy zasadniczej:
Dy = 80 cm; Dx = 50 cm;
dla map topograficznych w skali 1:10 000:
Dy = 80 cm; Dx = 50 cm;
dla map topograficznych w skali 1:25 000 i 1:50 000:
Dy = 64 cm; Dx = 40 cm;
dzielą każdą strefę układu "1965" na tak zwane sekcje podziałowe. Linie podziałowe wyznaczające
sekcje map są równoległe do osi x i osi y układu współrzędnych płaskich prostokątnych danej
strefy. Początek podziału map na sekcje prostokątne pokrywa się z początkiem układu
współrzędnych płaskich prostokątnych, przechodzącym przez punkt główny danej strefy

odwzorowawczej.
Podstawą podziału na sekcje i systemu oznaczenia arkuszy mapy zasadniczej w skalach
1:5000, 1:2000, 1:1000 i 1:500 jest sekcja wielkoskalowej mapy topograficznej w skali 1:10 000.
Podstawą podziału na sekcje i systemu oznaczania arkuszy map topograficznych w skalach 1:50
000, 1:25 000, 1:10 000 jest sekcja mapy w skali 1 :100 000 o zasięgu terytorialnym Dy = 64 cm i
Dx = 40 cm.
Podstawowym mankamentem układu współrzędnych "1965" jest brak możliwości
sporządzania jednolitych i pełnowartościowych map obszaru całego kraju. Wynika to z faktu, że
poza granicami stref odwzorowawczych błędy odwzorowawcze szybko rosną, a poza tym
wzajemne skręcenie i przesunięcie układów uniemożliwia tworzenie jednolitych map obszaru całe
Polski. Nawet dla obszarów znajdujących się na styku dwóch lub trzech stref zachodzi konieczność
dublowania arkuszy. Powoduje to, że w układzie współrzędnych "1965" około 30% arkuszy map
położonych na styku stref podlega dwu-, a czasem trzykrotnemu niezależnemu opracowaniu.
UKŁAD WSPÓŁRZĘDNYCH GUGIK 80 (1980 R)
Najważniejsze cechy:
elipsoida: Krasowskiego
punkt przyłożenia: Pułkowo (B = 59°46'18.55'', L = 30°19'42.09'')
azymut orientacji: Pułkowo - Bugry (A = 121°40'38.79'')
odwzorowanie quasi-stereograficzne (Roussilhe'a)
punkt główny: B = 52°10s, L = 19°10s;
m0 = 3499/3500, r0 = 215 km
X0 = 500 000, Y0 = 500 000
UKŁAD WSPÓŁRZĘDNYCH 1992 (2000 R)
Dla map topograficznych w skali 1:10 000 i mniejszych stosuje się jeden układ dla całego
kraju"1992/19" (rys. 11), w systemie GRS 80. Jest on utworzony na podstawie matematycznie
jednoznacznego przyporządkowania punktów powierzchni Ziemi odpowiednim punktom na
płaszczyźnie według teorii odwzorowania kartograficznego Gaussa-Krügera.
Najważniejsze cechy:
elipsoida:GRS-80
odwzorowanie:Gaussa-Krügera
jeden pas odwzorowawczy dla całej Polski L0 = 19°
skala m0 = 0.9993,
X = x - 5 300 000 m, Y = y + 500 000 m
obowiązuje od 8.08.2000 r
dla map w skalach 1:10 000 i mniejszych
Dla wyznaczania wysokości w systemie odniesień przestrzennych "1992" stosuje się system
wysokości normalnych "Kronsztad 86", w którym zostały określone wysokości punktów
podstawowej i szczegółowej osnowy geodezyjnej kraju.
Ze względu na znaczne zniekształcenia liniowe układ nie jest rekomendowany do wielkoskalowych
opracowań kartograficznych.

UKŁAD WSPÓŁRZĘDNYCH 2000 (2000 R)
Dla opracowań katastralnych i przy opracowaniu mapy zasadniczej w skali 1:5 000 i skalach
większych stosuje się odwzorowanie Gaussa-Krügera tworzące cztery układy współrzędnych
płaskich prostokątnych, oznaczone symbolami: "2000/15", "2000/18", "2000/21" i "2000/24", w
systemie GRS-80.
Współrzędne płaskie prostokątne x, y są obliczane w odwzorowaniu Gaussa-Krügera w pasach
trzystopniowych o południkach osiowych:15°, 18°, 21°, 24°. Pasy ponumerowane są: 5, 6, 7, 8
(rys.13). Współczynnik zmiany skali równa się 0,999923 w południku osiowym.
Początkiem układu współrzędnych w danym pasie odwzorowania jest punkt przecięcia się obrazu
południka osiowego z obrazem równika. Przy określaniu współrzędnych - współrzędna x pozostaje
nie zmieniona, a do współrzędnej y w zależności od południka osiowego dodaje się:
5 500 000 m przy południku Lo = 15°,
6 500 000 m przy południku Lo = 18°,
7 500 000 m przy południku Lo = 21°,
8 500 000 m przy południku Lo = 24°.
Pierwsza cyfra współrzędnej y oznacza numer pasa odwzorowania.
Najważniejsze cechy:
elipsoida GRS-80
odwzorowanie Gaussa-Krügera
cztery 3-stopniowe pasy odwzorowawcze dla południków 15°, 18°, 21°, 24°
skala m0 = 0.999923,
X = x, Y = y + (5 500 000, 6 500 000, 7 500 000, 8 500 000) m
obowiązuje od 8.08.2000 r
dla mapy zasadniczej
Układ ten realizuje kompromis w rozłożeniu zniekształceń liniowych; od -7,7 cm/km na południku
środkowym strefy do maksymalnie około +7 cm/km na brzegu strefy.
Mapa zasadnicza jest prowadzona w formie numerycznej z możliwością przedstawienia jej
treści w formie analogowej (klasycznej). Mapę zasadniczą w formie analogowej wykonuje się w
podziale sekcyjnym prostokątnym. Dla mapy zasadniczej stosuje się jednolity dla każdego pasa
podział na arkusze mapy. Obszar terenu na skraju danego pasa ogranicza się do granic naturalnych
lub granic władania (jednostek ewidencyjnych), tzn. z zasady nie stosuje się pasa pokrycia z
sąsiednim układem współrzędnych. W miarę jednak potrzeby wynikającej z realizacji konkretnych
zadań praktycznych obszar terenu na skraju danego pasa rozszerza się do dalszych granic
naturalnych lub granic władania.
Podstawą do określania formatów i numeracji arkuszy mapy zasadniczej w skalach 1:5 000,
1:2 000, 1:1 000, 1:500 w podziale arkuszowym prostokątnym jest arkusz 1:10 000 o wymiarach 5
km na 8 km.

5. Zasady wykonywania pomiarów sytuacyjnych
Wrzucam tutaj to co znalazłem w rozporządzeniu, ciężko coś usunąć z tego, przeczyta się to z dwa
razy i mniej więcej będziemy ogarniać myślę... albo nie.
Geodezyjny pomiar sytuacyjny – rozumie się przez to identyfikację i określenie położenia
geometrycznych środków obiektów punktowych, punktów załamań osi obiektów liniowych
orazpunktów załamań obrysów obiektów powierzchniowych, w sposób umożliwiający wyznaczenie
współrzędnych tych punktów w obowiązującym układzie współrzędnych płaskich prostokątnych
oraz ustalenie kształtu i rodzaju obiektów.
Ogólne standardy techniczne wykonywania geodezyjnych pomiarów sytuacyjnych i
wysokościowych
§ 3. 1. Przy wykonywaniu geodezyjnych pomiarów sytuacyjnych wyniki pomiarów długości oraz
współrzędne prostokątne płaskie wyraża się w metrach z precyzją do 0,01 m.
2. W przypadku geodezyjnych pomiarów, o którychmowa w § 50—61 (inwestycje budowlane,
inwentaryzacje i takie tam), wykonywanych z dokładnością wyższą niż 0,01 m, wyniki tych
pomiarów wyraża się w metrach z precyzją do 0,001 m.
3. Wyniki pomiaru wysokościowego wyraża się w metrach z precyzją do 0,1 m, 0,01 m lub 0,001 m
w zależności od dokładności wykonywanego pomiaru.
4. Wyniki pomiaru kierunków i kątów związane z geodezyjnymi pomiarami sytuacyjnymi i
wysokościowymi wyraża się w gradach, z precyzją do 0,0001g.
§ 4. 1. Geodezyjne pomiary sytuacyjne i wysokościowe wykonuje się w oparciu o punkty poziomej
i wysokościowej osnowy geodezyjnej.
2. W przypadku gdy gęstość punktów osnów geodezyjnych jest niewystarczająca do wykonania
geodezyjnego pomiaru sytuacyjnego lub wysokościowego, osnowy te uzupełnia się punktami
osnów pomiarowych.
3. Przy wykonywaniu geodezyjnych pomiarów sytuacyjnych i wysokościowych związanych z
obsługą inwestycji budowlanych, o których mowa w § 50—61 (budowlanka itp), może być
stosowana osnowa realizacyjna dostosowana, pod względem konstrukcji geometrycznej oraz
dokładności położenia jej punktów, do charakteru inwestycji oraz wymagań określonych w
dokumentacji budowy.
§ 5. 1. Geodezyjne pomiary sytuacyjne wykonywanesą jako:
1) geodezyjne pomiary terenowe;
2) geodezyjne pomiary fotogrametryczne;
3) geodezyjne pomiary kartometryczne.
2. Geodezyjne pomiary wysokościowe wykonywane są jako:
1) geodezyjne pomiary terenowe;
2) geodezyjne pomiary fotogrametryczne.
§ 6. 1. Przy wykonywaniu geodezyjnych pomiarów sytuacyjnych i wysokościowych wykorzystuje
się materiały PZGiK, jeżeli wyniki analizy tych materiałów, przeprowadzone przez wykonawcę
prac geodezyjnych i kartograficznych, zwanego dalej „wykonawcą”, pod względem dokładności,
aktualności i kompletności, wskazują na ich przydatność do wykonania pomiarów.
2. Specyfikację modelu pojęciowego geodezyjnych pomiarów sytuacyjnych i wysokościowych
określa załącznik do rozporządzenia.
§ 7. 1. Geodezyjne pomiary sytuacyjne i wysokościowe poprzedza się wywiadem terenowym,
mającym na celu:
1) identyfikację w terenie punktów osnowy geodezyjnej
oraz znaków granicznych;
2) porównanie treści materiałów PZGiK ze stanem
faktycznym;

3) pozyskanie informacji o terenie, który ma być objęty pomiarem, mających znaczenie dla zakresu
planowanych prac geodezyjnych.
2. Wyniki wywiadu terenowego uwidacznia się kolorem czerwonym na kopii mapy zasadniczej lub
ewidencyjnej.
3. Informacje dotyczące nazw miejscowości i obiektów fizjograficznych oraz dane adresowe
zawarte w dokumentacji sporządzonej w wyniku geodezyjnych pomiarów sytuacyjnych i
wysokościowych muszą być zgodne z danymi zawartymi w:
1) państwowym rejestrze nazw geograficznych;
2) ewidencji miejscowości, ulic i adresów.
4. Oznaczenia obiektów uwidacznianych w dokumentacji sporządzonej w wyniku geodezyjnych
pomiarów sytuacyjnych i wysokościowych muszą być zgodne z oznaczeniami tych obiektów w
bazach danych, o których mowa w art. 4 ust. 1a pkt 1—6 i 10 oraz ust. 1b ustawy, lub nawiązywać
do tych oznaczeń.
§ 8. Geodezyjne pomiary sytuacyjne i wysokościowe mogą być wykonywane metodą precyzyjnego
pozycjonowania, przy pomocy globalnego systemu nawigacji satelitarnej, zwanego dalej „GNSS”,
jeżeli:
1) zapewniony jest bezpośredni odbiór sygnałów emitowanych przez satelity;
2) sygnały emitowane przez satelity nie są zakłócane przez urządzenia emitujące fale
elektromagnetyczne, w szczególności: nadajniki i przekaźniki radiowe i telewizyjne, linie
energetyczne, stacje telefonii cyfrowej.
§ 9. Przy wykonywaniu geodezyjnych pomiarów sytuacyjnych i wysokościowych metodą
precyzyjnego pozycjonowania przy pomocy GNSS stosuje się pomiarowe techniki zapewniające
wyznaczenie położenia szczegółów terenowych z dokładnością określoną w § 29 ust. 1 oraz w § 36
ust. 1 i 2, w szczególności:
1) technikę statyczną;
2) technikę szybką statyczną;
3) technikę kinematyczną RTK lub RTN.
§ 10. Do wykonywania pomiarów metodą precyzyjnego pozycjonowania przy pomocy GNSS
wykorzystuje się system ASG-EUPOS oraz inne systemy stacji referencyjnych, jeżeli dane
określające położenie tych stacji włączone zostały do PZGiK, a serwisy tych systemów zapewniają
osiągnięcie dokładności położenia szczegółów terenowych z dokładnością określoną w § 29 ust. 1
oraz w § 36 ust. 1 i 2.
§ 11. Przed rozpoczęciem i po zakończeniu sesji pomiarowej metodą precyzyjnego pozycjonowania
przy pomocy GNSS ustala się wysokość anteny odbiornika z dokładnością do 0,01 m.
§ 12. 1. Przed rozpoczęciem lub w trakcie każdej sesji pomiarowymi technikami kinematycznymi
RTK oraz RTN wykonuje się pomiar kontrolny na co najmniej dwóch punktach poziomej osnowy
geodezyjnej, zlokalizowanych w odległości nie większej niż 5 km od punktów będących
przedmiotem pomiaru.
2. Odchyłka liniowa ustalona na podstawie pomiaru kontrolnego nie może przekraczać:
1) w odniesieniu do współrzędnych prostokątnych płaskich — 0,12 m (dx, dy +- 0,12 m);
2) w odniesieniu do wysokości — 0,09 m (dh +- 0,09 m).
§ 13. 1. Przy wykonywaniu geodezyjnych pomiarów sytuacyjnych i wysokościowych pomiarowymi
technikami statyczną oraz szybką statyczną przebieg czynności pomiarowych utrwala się w
dzienniku pomiarowym.
2. W dzienniku pomiarowym umieszcza się następujące informacje:
1) numer punktu pomiarowego;
2) datę wykonania sesji pomiarowej na punkcie;
3) czas GMT i czas lokalny rozpoczęcia i zakończenia sesji pomiarowej;
4) typ anteny i odbiornika GNSS użytego w sesji pomiarowej;
5) wyniki pomiarów wysokości anteny;
6) imię i nazwisko osoby wykonującej sesję pomiarową.

§ 14. Do obliczenia wartości błędu średniego położenia punktu, wyznaczonego na podstawie
danych obserwacyjnych, wykorzystuje się matematyczne prawo Gaussa przenoszenia się błędów.
§ 15. Przy wykonywaniu geodezyjnych pomiarów sytuacyjnych i wysokościowych dopuszcza się
stosowanie metod, technologii i technik pomiarowych innych niż określone przepisami
rozporządzenia, jeżeli te metody, technologie i techniki zapewnią uzyskanie danych
obserwacyjnych z wymaganą dokładnością, a jednocześnie wykonawca przedstawi w sprawozdaniu
technicznym opis tych metod, technologii i technik wraz z matematyczną analizą dokładności
danych obserwacyjnych.
Jeszcze dorzucam ważniejsze rzeczy, bo wszystko jest w rozporządzeniu, ale jak wrzuce całość to
zostanę zastrzelony przez każdego z was razem i z osobna... Wybrałem to, co ma jakikolwiek sens i
może się pojawić...
3. Ze względu na wymagania dokładnościowe pomiaru
wyróżnia się następujące grupy szczegółów terenowych:
1) I grupa — szczegóły terenowe jednoznacznie identyfikowalne w terenie, zachowujące
długookresową niezmienność kształtu i położenia, w szczególności:
a) znaki i punkty graniczne,
b) znaki geodezyjne,
c) obiekty budowlane i urządzenia budowlane,
w tym elementy sieci uzbrojenia terenu, bezpośrednio dostępne do pomiaru;
2) II grupa:
a) szczegóły terenowe jednoznacznie identyfikowalne w terenie, których kształt i położenie nie
zachowuje długookresowej niezmienności, w szczególności: budowle i urządzenia ziemne w
postaci nasypów, wykopów, grobli, tam, wałów przeciwpowodziowych, rowów, kanałów oraz
sztuczne zbiorniki wodne,
b) zakryte obiekty budowlane i urządzenia budowlane, w tym zakryte elementy sieci uzbrojenia
terenu,
c) elementy zagospodarowania terenu, w szczególności: parki, zieleńce, trawniki, place zabaw i
wypoczynku, skwery, pojedyncze drzewa oraz boiska sportowe;
3) III grupa — szczegóły terenowe, których jednoznaczna identyfikacja w terenie jest utrudniona
i zależna od oceny osoby wykonującej pomiar, takie jak:
a) kontury użytków gruntowych oraz odkrywki glebowe na potrzeby gleboznawczej klasyfikacji
gruntów,
b) cieki i zbiorniki wodne o naturalnych liniach brzegowych,
c) oddziały leśne na obszarach lasów i parków narodowych.
§ 29. 1. Geodezyjny pomiar sytuacyjny wykonuje się w sposób zapewniający określenie położenia
punktu sytuacyjnego względem najbliżej położonych punktów poziomej osnowy geodezyjnej oraz
osnowy pomiarowej z dokładnością nie mniejszą niż:
1) 0,10 m — w przypadku szczegółów terenowych I grupy;
2) 0,30 m — w przypadku szczegółów terenowych II grupy;
3) 0,50 m — w przypadku szczegółów terenowych III grupy.

2. W przypadku gdy geodezyjny pomiar sytuacyjny wykonuje się w celu założenia lub aktualizacji
bazy danych, o której mowa w art. 4 ust. 1a pkt 8 ustawy, pomiar ten wykonuje się z dokładnością:
1) 1,5 m — w przypadku szczegółów terenowych I grupy;
2) 3,0 m — w przypadku szczegółów terenowych II grupy;
3) 5,0 m — w przypadku szczegółów terenowych III grupy.
3. Przy pomiarze szczegółów terenowych I grupy wykonuje się pomiar kontrolny polegający na:
1) drugim, niezależnym wyznaczeniu położenia szczegółów lub
2) pomiarze odległości pomiędzy dwoma punktami sytuacyjnymi objętymi pomiarem (miary
czołowe), lub
3) pomiarze odległości pomiędzy punktem objętym pomiarem a innym punktem wyznaczonym z
dokładnością właściwą dla szczegółów terenowych I grupy.
§ 31. 1. Przestrzenne obiekty liniowe oraz przestrzenne obiekty obszarowe w trakcie ich
geodezyjnego pomiaru sytuacyjnego podlegają generalizacji polegającej na:
1) przedstawieniu obiektów krzywoliniowych za pomocą linii łamanych;
2) przedstawieniu obiektów obszarowych za pomocą linii łamanych lub punktów;
3) pominięciu punktów wyznaczających obiekt, jeżeli nie spowoduje to zniekształcenia jego
reprezentacji geometrycznej;
4) pomiarze przebiegu osi obiektu liniowego z jednoczesnym określeniem jego wymiaru
poprzecznego.
2. Przy geodezyjnym pomiarze sytuacyjnym pomija się punkt sytuacyjny, jeżeli odchylenie tego
punktu od linii wyznaczonej przez dwa sąsiednie pomierzone szczegóły terenowe nie przekracza:
1) w przypadku I grupy szczegółów terenowych — 0,10 m;
2) w przypadku II grupy szczegółów terenowych — 0,30 m;
3) w przypadku III grupy szczegółów terenowych — 0,50 m.
3. Przy geodezyjnym pomiarze sytuacyjnym dotyczącym:
1) elementów naziemnych sieci uzbrojenia terenu, których wymiary podłużne i poprzeczne są
mniejsze niż 0,50 m, pomiarowi podlega środek ciężkości tego elementu;
2) przewodów sieci uzbrojenia terenu oraz kanałów zbiorczych tych sieci o średnicy przekroju lub
wymiarach podłużnych i poprzecznych przekroju mniejszych niż 0,50 m pomiarowi podlega oś
przewodu lub kanału.
§ 32. Geodezyjne sytuacyjne pomiary terenowe
wykonuje się metodami:
1) biegunową;
2) ortogonalną (domiarów prostokątnych);
3) wcięć:
a) kątowych,
b) liniowych,
c) kątowo-liniowych;
4) precyzyjnego pozycjonowania przy pomocy GNSS.
3. Przy pomiarze szczegółów terenowych II i III grupy, w przypadku braku punktów, o których
mowa w ust. 2, linia pomiarowa może być wyznaczona przez szczegóły terenowe I grupy.

4. Długości linii pomiarowych nie powinny przekraczać:
1) na terenach zurbanizowanych 250 m;
2) na terenach rolnych i leśnych 400 m.
5. Długość linii pomiarowej podlega weryfikacji, której dokonuje się w drodze:
1) porównania pomierzonej długości linii pomiarowej z długością wyznaczoną na podstawie
współrzędnych punktów, o których mowa w ust. 2 i 3, wyznaczających przebieg tej linii;
2) dwukrotnego pomiaru, z których pierwszy wykonuje się w trakcie pomiaru szczegółów
terenowych.
6. Wyniki przeprowadzonej weryfikacji nie powinny przekraczać wielkości odchyłek liniowych,
zwanych dalej „fL”:
1) w przypadku, o którym mowa w ust. 5 pkt 1:
fL +- 0,07 m + 50 mm/km;
2) w przypadku, o którym mowa w ust. 5 pkt 2:
fL +- 2 (0,07 m + 50 mm/km).
7. Dopuszczalne długości rzędnych:
Grupa I: maksymalna długość rzędnej 25m, maksymalny błąd rzędnej 0,05m
Grupa II: maksymalna długość rzędnej 50m, maksymalny błąd rzędnej 0,05m
Grupa III: maksymalna długość rzędnej 70m, maksymalny błąd rzędnej 0,10m
8. Przy pomiarze szczegółów terenowych II i III grupy dopuszczalne długości rzędnych mogą
zostać zwiększone odpowiednio do 75 m i 100 m, o ile zostanie wykonany pomiar kontrolny

6. Charakterystyka osnów pomiarowych
§ 16. 1. Osnowy pomiarowe zakłada się w postaci:
1) pomiarowej osnowy sytuacyjnej;
2) pomiarowej osnowy wysokościowej;
3) pomiarowej osnowy sytuacyjno-wysokościowej (dwufunkcyjnej).
2. Średni błąd położenia punktów pomiarowej osnowy sytuacyjnej nie może być większy niż
0,10 m względem najbliższych punktów poziomej osnowy geodezyjnej.
3. Średni błąd położenia punktów pomiarowej osnowy wysokościowej nie może być większy niż
0,05 m względem najbliższych punktów wysokościowej osnowy geodezyjnej.
§ 17. 1. Pomiarową osnowę sytuacyjną wyznacza się w nawiązaniu do poziomej osnowy
geodezyjnej w postaci:
1) sieci kątowo-liniowych;
2) sieci punktów wyznaczonych metodą precyzyjnego pozycjonowania przy pomocy GNSS;
3) wybranych i wzajemnie powiązanych ze sobą punktów terenu, w sposób zapewniający
widoczność z każdego z tych punktów na co najmniej dwa punkty sąsiednie, których położenie
określono metodami pomiarów fotogrametrycznych;
4) sieci modularnych.
2. Przy zakładaniu pomiarowych osnów sytuacyjnych należy zapewnić:
1) wielopunktowe nawiązanie do punktów poziomej osnowy geodezyjnej;
2) co najmniej dwukrotny pomiar każdego mierzonego elementu;
3) wykonanie obserwacji nadliczbowych;
4) wykonanie pomiarów:
a) liniowych ze średnim błędem pomiaru odległości md +- 0,01 m + 0,01 m/km,
b) kątowych ze średnim błędem pomiaru kąta mk +- 0,0030g,
§ 18. 1. Dane obserwacyjne dotyczące osnowy pomiarowej wyrównuje się metodą najmniejszych
kwadratów w układzie sieci jednorzędowej.
2. Miarą dokładności założonej osnowy pomiarowej są błędy średnie położenia wyznaczanych
punktów, przy założeniu bezbłędności punktów nawiązania.
§ 19. 1. Punkty pomiarowej osnowy sytuacyjnej, o ile nie stanowią trwałych, jednoznacznych
elementów sytuacyjnych, markuje się na gruncie w sposób zapewniający jednoznaczne oznaczenie
tych punktów w terenie, jeżeli jest to niezbędne do wykonywania pomiarów.
2. Do markowania można użyć w szczególności:
pali drewnianych, rurek metalowych lub ceramicznych, bolców, trzpieni metalowych, znaków z
tworzyw sztucznych oraz znaków wyrytych lub namalowanych.
4. Do stabilizacji można użyć: znaków z kamienia, betonu lub tworzyw sztucznych, a w przypadku
nawierzchni utwardzonych — bolców, trzpieni lub prętów, o długości zapewniającej trwałość
stabilizacji.
§ 20. 1. Sieć kątowo-liniową zakłada się jako konstrukcję geometryczną, w której położenie
wyznaczanych punktów osnowy określa się na podstawie obserwacji kątowych i liniowych, w

szczególności w postaci ciągów poligonowych lub zbioru punktów wyznaczonych metodami wcięć:
kątowych, liniowych, kątowo-liniowych.
2. Sieć kątowo-liniową nawiązuje się do poziomej osnowy geodezyjnej w sposób zapewniający
orientację przestrzenną sieci z co najmniej dwóch niezależnych kierunków określonych przez
niezależne pary punktów nawiązania.
3. Długość ciągu poligonowego nie powinna przekraczać 3000 m.
4. W przypadku braku możliwości nawiązania dwustronnego dopuszcza się zakładanie ciągów
poligonowych jednostronnie nawiązanych, zwanych dalej „ciągami wiszącymi”, składających się z
nie więcej niż dwóch boków.
5. Pomiar elementów ciągu wiszącego podlega weryfikacji w drodze pomiaru, wykonanego z
ostatniego punktu tego ciągu, co najmniej jednego szczegółu terenowego I grupy o znanych
współrzędnych.
6. Ciągi poligonowe mogą być zakładane jako sieci z punktami węzłowymi.
2. W sieci modularnej podlegają pomiarowi:
1) punkty nawiązania będące punktami poziomej osnowy geodezyjnej oraz punktami
wysokościowej osnowy geodezyjnej;
2) punkty wiążące będące punktami należącymi do co najmniej dwóch modułów;
3) punkty szczegółów terenowych.
§ 23. Pomiarową osnowę wysokościową wyznacza się w postaci ciągów niwelacyjnych, w
nawiązaniu do co najmniej dwóch punktów wysokościowej osnowy geodezyjnej, metodami:
1) niwelacji geometrycznej;
2) niwelacji trygonometrycznej;
3) niwelacji satelitarnej wykonywanej metodą precyzyjnego pozycjonowania przy pomocy GNSS.
§ 24. 1. Dane obserwacyjne niezbędne do ustalenia wysokości punktów pomiarowej osnowy
wysokościowej metodami, o których mowa w § 23 pkt 1 i 2, uzyskuje się w wyniku pomiaru w
dwóch kierunkach, głównym i powrotnym, między punktami nawiązania.
2. Punktami pomiarowej osnowy wysokościowej mogą być:
1) punkty poziomej osnowy geodezyjnej;
2) punkty pomiarowej osnowy sytuacyjnej;
3) trwałe szczegóły terenowe, których położenie zostało określone z dokładnością właściwą dla
szczegółów terenowych I grupy
§ 25. 1. Pomiar metodą niwelacji geometrycznej wykonuje się na każdym stanowisku dwukrotnie
ze zmianą wysokości osi celowej według schematu: wstecz, w przód — zmiana wysokości — w
przód, wstecz. Różnica między wynikami tych pomiarów nie może przekroczyć 0,004 m.

7. Teoria błędów
W praktyce pomiarowej występują trzy rodzaje błędów:
grube,
systematyczne,
przypadkowe
- błędy grube: tzw. czeski błąd, np. złe zanotowanie liczby przyłożeń taśmy
- błędy systematyczne, czyli instrumentalne, osobowe, środowiskowe (ślepy obserwator, deszcz,
tornado)
- błędy przypadkowe, mające charakter losowy
Według kryterium metody pomiaru obserwacje mogą być:
bezpośrednie,
pośrednie.
Według kryterium dokładności wyniki pomiaru dzielimy na:
jednakowo dokładne,
różnodokładne.
Cel zagadnień wyrównawczych:
wyznaczenie wartości najprawdopodobniejszych,
oszacowanie dokładności obserwacji pojedynczych, względnych, wartości przeciętnych oraz
funkcji wyznaczonych analizowanych zmiennych.
PRAWO PRZENOSZENIA SIĘ BŁĘDÓW – PRAWO GAUSSA – przedstawia nam w jaki sposób
błędy składowe przenoszą się na błąd funkcji
przykład:
mx, my, mz – błędy
X,Y,Z – obserwacje
mF (błąd funkcji) = pierwiastek[ (dF/dx)*mx^2 + (dF/dy)*my^2 + (dF/dz)*mz^2 ], gdzie dF to
pochodna z funkcji, odpowiednio po zmiennej x, y i z
Ocena dokładności:
- średni błąd pojedynczej obserwacji:
m=
√
1
n −1
∑
1
n
(
x
i
− x
śr
)
2
- średni błąd średniej arytmetycznej: mx = +- m / pierwiastek(n)
Ocena dokładności w obserwacjach niejednakowodokładnych (inne warunki, długości ciągów itp.)
Definicja wagi: waga jest to dodatnia liczba niemianowana określająca stopień zaufania do
wyników pomiaru. Jest ona odwrotnie proporcjonalna do kwadratu średniego błędu obserwacji.
Wiele informacji powinno się znaleźć w opracowaniu z rachunku prawdopodobieństwa, bo
zagadnienia na siebie nachodzą.

8. Charakterystyka sporządzania map
1. Klasyfikacja map i podział na arkusze
a) ogólnogeograficzne: zawierają w swej treści naturalne i sztuczne elementy krajobrazu
powierzchni Ziemi, np. rzeźbę, hydrografię, drogi, linie kolejowe, przedstawione w jednym
względnym stopniu szczegółowości.
b) tematyczne: opracowania kartograficzne eksponujące JEDEN lub KILKA elementów treści mapy
ogólnogeograficznej, lub określone zjawisko, zagadnienie, proces itp.
2. Arkusze sekcyjne ( godła map )
Układ 1965
Godło 182 – sekcja w skali 1:100 000, o wymiarach 40x60 km.
1 oznacza numer strefy
8 oznacza numer pasa
2 oznacza numer słupa
Godło 182.122 – sekcja w skali 1:10 000, wymiary 5x8
Godło 182.122.04 – skala 1:2 000, wymiary 1x,1,6
Godło 182.122.0442 – skala 1:500
Układ 2000
mapa wyjściowa w skali 1:10 000, o godle: a.bbb.cc, gdzie
a – numer strefy (5,6,7 albo 8)
bbb – numer pięciokilometrowego pasa od współrzędnej Xo = 4920, bbb=int((Xi – 4920)/5)
cc – położenie mapy w stosunku do południka środkowego, cc=int((Yi – 332)/8)
* int – wartość całkowita, Yi – współrzędna Y z opuszczoną pierwszą cyfrą (od pasa)
np. Godło 6.116.32, w skali 1:10 000, postępowanie analogiczne jak w układzie 1965, tzn:
1:500 → 6..116.32.20.2.4
Mapa zasadnicza: aktualne informacje o przestrzennym rozmieszczeniu obiektów
ogólnogeograficznych oraz elementów ewidencji gruntów i budynków, a także sieci uzbrojenia
terenu, zawierająca treść obligatoryjną i fakultatywną, zależną od potrzeb i zamierzeń
inwestycyjnych.

9. Obliczenia w poziomej osnowie geodezyjnej
tutaj może chodzić o sposoby wyznaczania azymutu, liczenia ciągów poligonowych, wcięć, mogę
to opracować, ale czy jest sens? Każdy ma zeszyt z I roku, bo wtedy jeszcze były zeszyty, jeśli
chcecie mogę to tutaj wklepać, ale myślę, że jest to zbędne. Tu potrzeba rysunków, troszkę
ograrnięcia się w temacie, przypomnienia pierdół, a szczególnie wyklepania dostępnych pytań z
zeszłych lat na pamięć.

10.
Zasady wykonywania pomiarów wysokościowych
1. Przed rozpoczęciem opracowania rzeźby terenu, konieczne jest zapoznanie się z występującymi
na opracowywanym obszarze typami rzeźby w celu prawidłowego rozmieszczenia pikiet i
przedstawienia form terenowych na mapie. Obejmuje ono:
1) rodzaj rzeźby terenu w danym rejonie - np. formy erozyjne, epoki lodowcowej, eoliczne itp.
2) charakterystyka formy, która określa dany typ rzeźby np.: pagórki moreny czołowej, sandry,
drumliny itp.
3) cechy rysunku formy: np.: przy formach erozyjnych - współkształtność warstwic, przy morenach
lub wydmach - niespokojny ich przebieg.
§ 8
1. Pikiety należy rozmieszczać tak, aby pokrywały dostatecznie teren pomiaru i były odpowiednio
obrane do jego konfiguracji na wszystkich punktach charakterystycznych w takiej ilości, która
będzie gwarantować wierne odtworzenie rzeźby terenu.
2. W terenie ukształtowanym pikiety należy rozmieszczać w następujących miejscach terenu:
- na szczytach, siodłach i najniższych miejscach form,
- na górnych i dolnych krawędziach zboczy,
- na liniach szkieletowych (grzbietowych i ściekowych) a szczególnie w miejscach załamania ich
profilów.
3. Dla powierzchni, których układ przestrzenny powstał w wyniku działalności gospodarczej
człowieka (budowle ziemne, tereny rozkopane), pikiety należy rozmieszczać w taki sposób, aby
charakteryzowały:
- układ przestrzenny i krawędzie płaszczyzn utworu regularnego,
- naturalną powierzchnię terenu, która nie uległa zmianie.
4. Ilość pikiet przypadających na jeden hektar zależy od typu rzeźby, przyjętego zasadniczego
cięcia warstwicowego, skali mapy i stopnia generalizacji.
5. Szczegółowe zasady rozmieszczania pikiet w zależności od stosowanej metody podają,
odpowiednie rozdziały niniejszych Wytycznych.

11. Niwelacja geometryczna
Niwelacja geometryczna wykonywana jest przy użyciu niwelatora i łat. Polega na pomiarze od
repera do repera wprzód i w tył. Dla zmniejszenia błędu pochylenia osi niwelatora niwelacja
powinna być wykonywana ze środka odcinka między mierzonymi punktami.
12. Niwelacja powierzchniowa
Niwelacja punktów rozproszonych (powierzchniowa) - wykonywana na małych powierzchniach,
dla dużej deniwelacji. Od zwykłej tachimetrii różni się tylko sprzętem - jest wykonywana
niwelatorem. Polega na pomiarze przewyższenia metodą niwelacji geometrycznej w przód przy
równoczesnym pomiarze odległości do mierzonego punktu i kąta między kierunkiem do pikiety, a
kierunkiem na nawiązanie.
Niwelator musi być wyposażony w limbus i urządzenie odczytowe (z łaty). Stanowiskami niwelacji
są punkty ciągu pomiarowego. Niezbędne dane: 1. Wysokość stanowiska, 2. wysokość instrumentu.
13. Opracowanie rzeźby terenu
(s. – strona w Beluchu częśc I)
Zgaduję, że chodzi tu o niwelację powierzchniową. Oto jej metody:
1. Metoda punktów rozproszonych (s. 369) – wyznaczenie wysokości charakterystycznych
punktów terenu; stosowana głównie na terenach zurbanizowanych
2. Metoda siatkowa (s. 376) – dokładny pomiar rzeżby terenu na obszarach płaskich,
niezurbanizowanych, gdy wskazane jest regularne rozmieszczenie punktów
wysokościowych w terenie; dotyczy głównie projektów inżynierskich np. budowa lotnisk,
obiektów sportowych, osiedli
3. Metoda profili (s. 387) – określenie wysokości charakterystycznych punktów wzdł€ż
określonych linii terenowych; stosowana dla obiektów wąskich i wydłużonych
14. Sprawdzenie i rektyfikacja sprzętu do niwelacji
A. Niwelatory libelowe
Warunki geometryczne niwelatorów libelowych
Płaszczyzna styczna w punkcie głównym libeli okrągłej powinna być pozioma i prostopadła do
osi obrotu niwelatora
Płaszczyzna zataczana przez oś libeli rurkowej (niwelacyjnej) powinna być pozioma i
prostopadła do osi głównej instrumentu
Kreska horyzontalna siatki celowniczej przy obrocie niwelatora wokół osi pionowej powinna
zataczać płaszczyznę poziomą prostopadłą do jego osi obrotu
Oś celowa niwelatora powinna być pozioma i równoległa do osi libeli niwelacyjnej
Płaszczyzna pionowa przechodząca przez oś libeli niwelacyjnej powinna być równoległa do
płaszczyzny pionowej przechodzącej przez oś celową niwelatora
Sprawdzenie i rektyfikacja warunków geometrycznych niwelatorów libelowych metodą
polową:
Sprawdzenie warunku libeli rurkowej
jak w teodolitach posiadających na alidadzie obie libele
Sprawdzenie prawidłowego ustawienia siatki celowniczej lunety niwelatora wykonujemy z
wykorzystaniem pionu sznurkowego zawieszonego w odl. 30 metrów od spoziomowanego
niwelatora. Jeśli równoległość nici pionu i kreski pionowej siatki celowniczej nie pokrywa się
na całej długości występuje wówczas błąd skręcenia siatki celowniczej. Błąd usuwamy
poprzez:
Odkręcenie przy okularze lunety osłony płytki z siatką celowniczą
Skręcamy siatkę kresek by uzyskać wymaganą równoległość
Dokręcamy śrubki i sprawdzamy jeszcze raz. Gdy wciąż źle – tą rogą do skutku.
Równoległość osi celowej lunety do osi libeli niwelacyjnej w warunkach polowych
sprawdzamy metodą podwójnej niwelacji.
Wyznaczamy w terenie dwa punkty W i P w odległości 40 metrów i sygnalizujemy je
żabkami na których to stawiamy pionowo łaty. Pośrodku odcinka ustawiamy niwelator ze
sprawdzonymi wcześniej libelami. Wykonujemy odczyt z obu łat. Zmieniamy wysokość
stanowiska i ponawiamy pomiar obu łat. Na podstawie odczytów obliczamy średnią różnicę
wysokości między punktami W i P. Różnica ta wolna jest od błędu nierównoległości osi
celowej do osi libeli niwelacyjnej. Przestawiamy niwelator na odległość ok. 5 metrów od
punktu W i wykonujemy odczyt na obu łatach. Obliczmy różnicę na podstawie tych
odczytów. Jeżeli błąd nierówności między różnicami z obu stanowisk jest więszy lub równy
2 mm, to oś celowa niwelatora nie jest równoległa do osi libeli niwelacyjnej. Należy
obliczyć prawidłowy odczyt na łacie P, a następnie wykonać rektyfikację. Tę wykonać
można na dwa sposoby:
Sposób I:
Śrubką elewacyjną nastawiamy prawidłowy odczyt na łacie P
Środek pęcherzyka libeli niwelacyjnej doprowadzamy do punktu głównego jej śrubkami
rektyfikacyjnymi
Jeżeli braknie zakresu śruby elewacyjnej należy wykorzystać sposób drugi.
Sposób II:
Wykręcamy śrubę elewacyjną do oporu.
Wkręcamy śrubę elewacyjną do oporu w kierunku przeciwnym, licząc jej pełne obroty.
Wykręcamy śrubę elewacyjną do połowy zakresu.
Odkręcamy osłonę płytki z siatką kresek i przesuwamy pionowo płytkę na wyliczony odczyt na
dalszej łacie.
Wychylony środek pęcherzyka libeli niwelacyjnej przemieszczamy do jej punktu głównego za
pomocą pionowych śrubek rektyfikacyjnych.
Kontrola na trzecim stanowisku.
Równoległość płaszczyzny pionowej zawierającej oś libeli niwelacyjnej oraz
płaszczyzny pionowej zawierającej oś celową lunety niwelatora
sprawdzamy następująco:
Poziomujemy niwelator i obracamy go tak, aby luneta była równoległa do linii przechodzącej
przez osie dwóch śrub poziomujących. Obracamy trzecią ze śrub poziomujących do oporu i
obserwujemy położenie środka pęcherzyka S libeli niwelacyjnej względem punktu
głównego G libeli.
Jeśli S
≡
G dla każdego obserwowanego położenia libeli, to niwelator jest
wolny od błędu wichrowatości osi celowej. Jeżeli taki błąd występuje usuwamy
go następująco:
•
Zwalniamy górną pionową śrubkę rektyfikacyjną libeli.
•
Parą poziomych śrubek rektyfikacyjnych doprowadzamy środek
pęcherzyka do punktu głównego libeli.
•
Obracamy śrubę poziomującą 1 w kierunku przeciwnym do
poprzedniego i obserwujemy położenie pęcherzyka.
•
Jeżeli zajmuje on stałe położenie to dokręcamy górną śrubkę
rektyfikacyjną uznając rektyfikację za ukończoną.
•
W przeciwnym przypadku powtarzamy czynności do skutku.
B. Niwelatory automatyczne (kompensator zamiast libeli niwelacyjnej)
Warunki geometryczne i techniczne niwelatorów automatycznych
Płaszczyzna styczna w punkcie głównym libeli okrągłej powinna być pozioma i prostopadła do
osi obrotu niwelatora

Kreska pozioma siatki celowniczej powinna być prostopadła do osi obrotu instrumentu
Kompensator niwelatora powinien działać prawidłowo w wyznaczonym zakresie
poziomowania instrumentu kontrolowanego za pomocą libeli okrągłej
Warunek osi celowej
Sprawdzenie i rektyfikacja warunków geometrycznych niwelatorów automatycznych
metodą polową:
•
Sprawdzenie działania kompensatora wykonujemy następująco:
Poziomujemy niwelator na statywie i obracamy go tak by jedna ze śrub
poziomujących znalazła się pod obiektywem niwelatora
W płaszczyźnie osi celowej niwelatora w odległości 30 metrów ustawiamy na
żabce łatę
Na łacie wykonujemy 6 odczytów odpowiadających kolejnym skrajnym
położeniom pęcherzyka libeli okrągłej (na początku i na końcu – pęcherzyk
na środku, oraz cztery skrajne wychylenia pęcherzyka w wewnętrznym kółku
zakresu libeli okrągłej), zmiany położenia pęcherzyka realizujemy za pomocą
śrub poziomujących
Jeśli odczyty są sobie równe –kompensator sprawny. Gdy błąd jest większy niż
błąd odczytu dla danej klasy instrumentu, niwelator należy oddać do naprawy w
serwisie.
•
Sprawdzenie warunku osi celowej wykonujemy jak dla niwelatorów li belowych.
Inaczej natomiast usuwa się ten błąd, co uzależnione jest od rozwiązań
konstrukcyjnych poszczególnych instrumentów. Szczegóły dla zainteresowanych w
Beluchu s. 341.
C. Niwelatory automatyczne kodowe
Warunki geometryczne i techniczne niwelatorów automatycznych kodowych
Płaszczyzna styczna w punkcie głównym libeli okrągłej powinna być pozioma i prostopadła do
osi obrotu niwelatora
Kreska pozioma siatki celowniczej powinna być prostopadła do osi głównej instrumentu
Kompensator niwelatora powinien działać prawidłowo w całym zakresie jego działania
Warunek osi celowej niwelatora
Sprawdzenie i rektyfikacja warunków geometrycznych niwelatorów automatycznych
kodowych metodą polową:
Pierwsze trzy warunki jak powyżej.
•
Warunek osi celowej realizujemy metodą podwójnej niwelacji
zaproponowanej przez jednego z panów z umlautem w nazwisku tj.
Naubera, Forstnera lub Kukkamaki. Trudno to ująć w słowa a ładnie
wszystko narysowali w Beluchu s. 344, po czym wyjaśniono też jak
ów błąd usunąć.

Sprawdzenie sprzętu pomocniczego:
1. Łaty
•
Czytelność podziału
•
Metryczność podziału łaty
•
Prostoliniowość łaty
•
Płaszczyzny stopki łaty
Odczyt w pięciu miejscach stopki – na środku i na rogach
•
Libeli
2. Podpórki do łat – czy nie ma luzu na połączeniach
3. Żabki – czy bolce są nieruchome a nóżki mają oste zakończenia
4. Libele – czy się pokrywa pionowa linia siatki celowniczej z krawędzią łaty
5. Statywy – ostre groty, brak luzów na złączach
15. Wyznaczanie pola powierzchni
Wyróżniamy pięć podstawowych metod obliczania pól powierzchni:
1. Analityczna – na podstawie współrzędnych lub miar pozyskanych bezpośrednio
terenie
2. Graficzna – na podstawie miar odczytanych z mapy
3. Analityczno-graficzna – fuzja poprzednich
4. Komputerowa – z wykorzystaniem komputera i jego urządzeń peryferyjnych (np.
skaner)
5. Terenowa – z wykorzystaniem nowoczesnej techniki pomiarowo-obliczeniowej
Ad. 1 Wyszczególnione sposoby:
•
Wzory Gaussa
•
Współrzędne biegunowe
•
Na podstawie pomiaru załamań wieloboku metodą rzędnych i
odciętych
•
Metodą biegunową z kilku stanowisk
Ad. 2
•
Na podstawie pomiaru odcinków na mapie
•
Wyznaczenie skurczu mapy
Wyjaśnienie piękne z rysunkami i wyczerpującym opisem w Beluchu s.434 - 459
Wyszukiwarka
Podobne podstrony:
opracowanie pytan id 338374 Nieznany
Nhip opracowanie pytan id 31802 Nieznany
Opracowanie pytan 3 id 338376 Nieznany
opracowania Ekologia id 794643 Nieznany
Opracowanie Hoffmanna id 338261 Nieznany
opracowanie antropologia id 338 Nieznany
Opracowanie Metrologia 2 id 338 Nieznany
opracowanko histogram id 338711 Nieznany
opracowanie ak id 338118 Nieznany
Opracowanie klp id 338270 Nieznany
Opracowanie seminaria id 338435 Nieznany
opracowanie lewkowicz id 338277 Nieznany
dod opracowanie wynikow id 1386 Nieznany
3 manipulator id 33818 Nieznany (2)
opracowanie cw5 id 338131 Nieznany
OpracowanieUOOPby wpiana7 id 33 Nieznany
OPRACOWANE ODPOWIEDZI id 337615 Nieznany
MOJE OPRACOWANIE wersja C id 30 Nieznany
Opracowanie pytan 5 id 338378 Nieznany
więcej podobnych podstron