SPRAWOZDANIE Z DWICZENIA LABORATORYJNEGO
Politechnika Śląska w Gliwicach
INSTYTUT ELEKTROENERGETYKI I STEROWANIA UKŁADÓW
LABORATORIUM
SYSTEMÓW CAD
W UKŁADZIE
STEROWANIA
Sprawozdanie z dwiczenia
„Badanie regulatora PI”
Semestr
VII
Sekcja
4
Wykonano:
13.10.2012r.
Ocena:
Imię i nazwisko
1. Szeja Marcin
Oddano:
27.10.2012r.
1. Cel dwiczenia
Celem dwiczenia jest poznanie właściwości regulatora PI w wykorzystaniu programu MatLAB.
Dwiczenie realizowane w w/w programie doskonale odwzorowanie regulatora PI, jak również
zdobywamy doświadczenie, które może przydad się w przyszłości.
2. Zadania
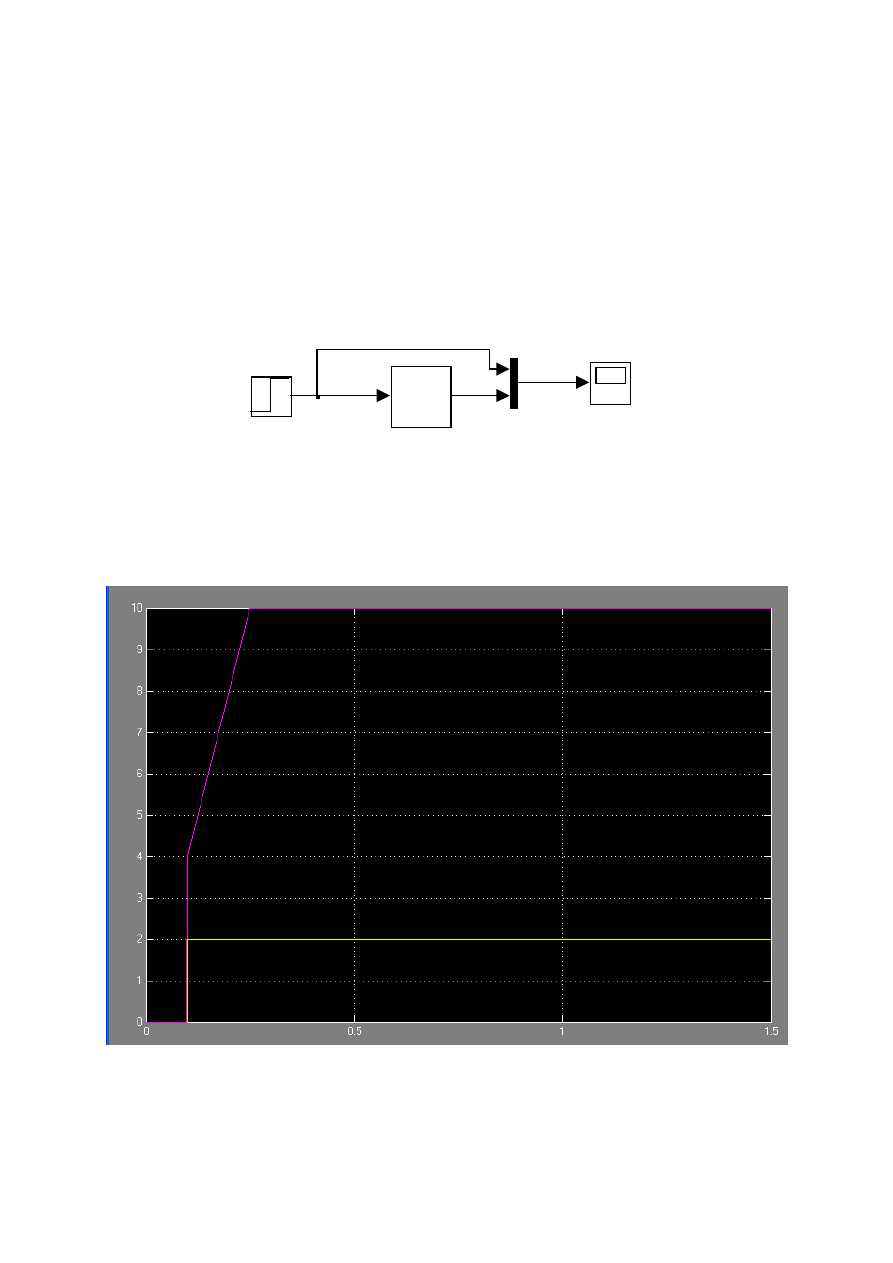
2.1.1 Odpowiedź regulatora na PI na skok jednostkowy :
Dane: Kp=2, Ki=20, [Upper lower]= [10 -10], Step -> 2 0,1s
2.1.1.a. Schemat układu:
2.1.1.b. Zarejestrowane przebiegi:
Step
Scope
PI
Discrete
PI Controller
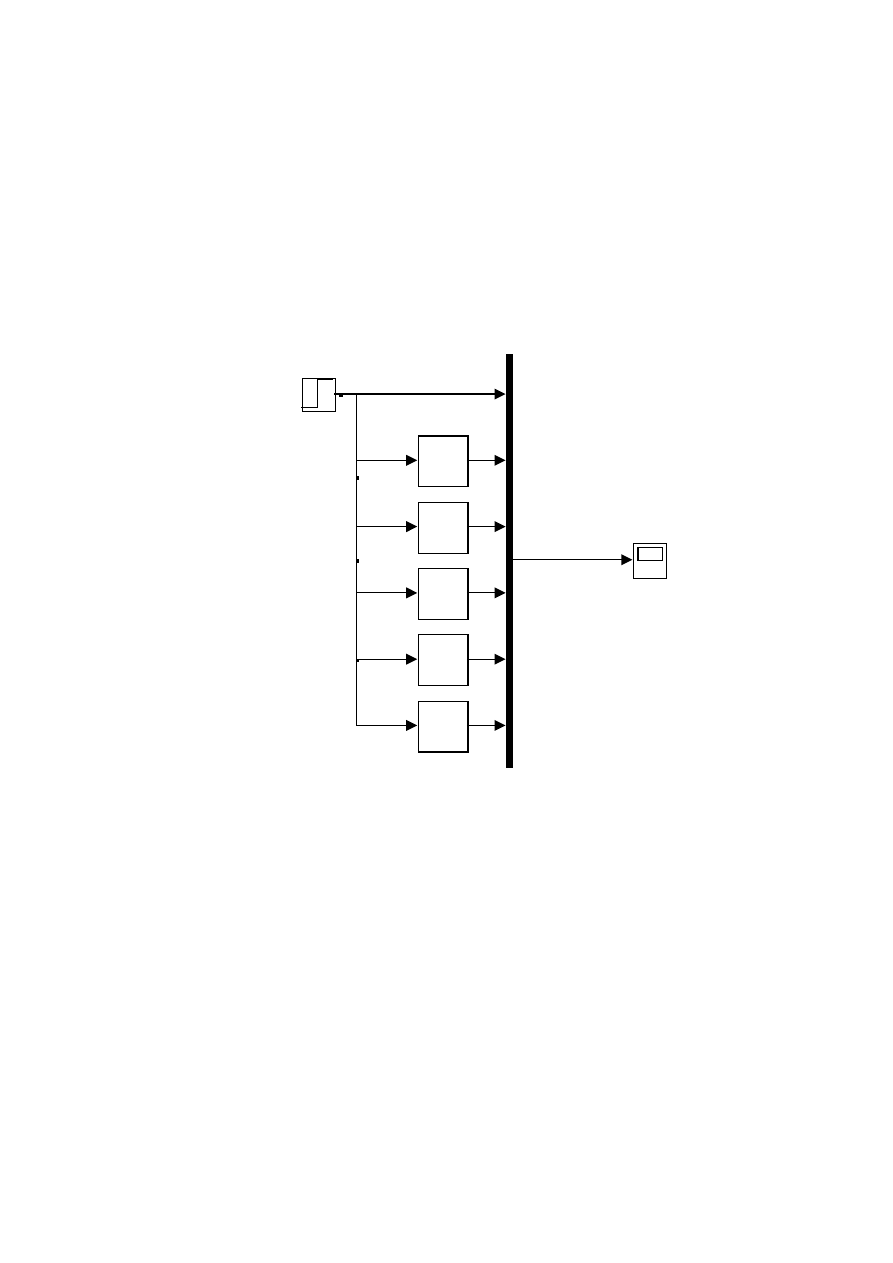
2.1.2. Odpowiedź regulatora na PI na skok jednostkowy :
PI1(fioletowy): (Kp=2, Ki=20, Upper lower= 10 -10); PI2(niebieski): (Kp=1, Ki=20, Upper lower= 10 -10)
PI3(czerwony): (Kp=4, Ki=20, Upper lower= 10 -10); PI4(zielony): (Kp=2, Ki=30, Upper lower= 10 -10)
PI5(granatowy): (Kp=2, Ki=10, Upper lower= 10 -10)
2.1.2.a. Schemat układu:
Step
Scope
PI
Discrete
PI Controller4
PI
Discrete
PI Controller3
PI
Discrete
PI Controller2
PI
Discrete
PI Controller1
PI
Discrete
PI Controller
2.1.2.b. Zarejestrowane przebiegi:
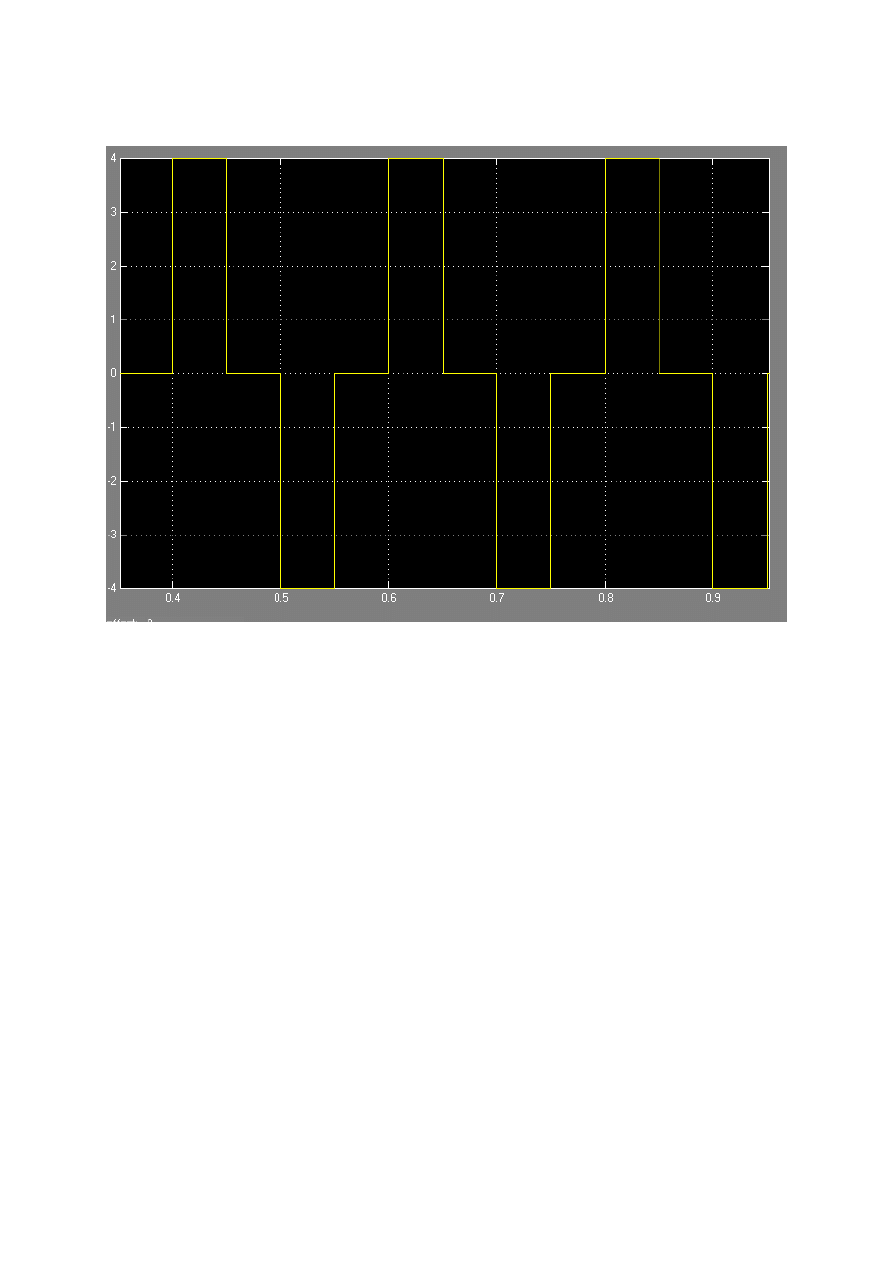
2.2 Generator sygnału prostokątnego
Dane: Amplitude=8, period =1/5; pulse width=50%
2.2.a.Schemat układu:
2.2.b.Zarejestrowane przebiegi:
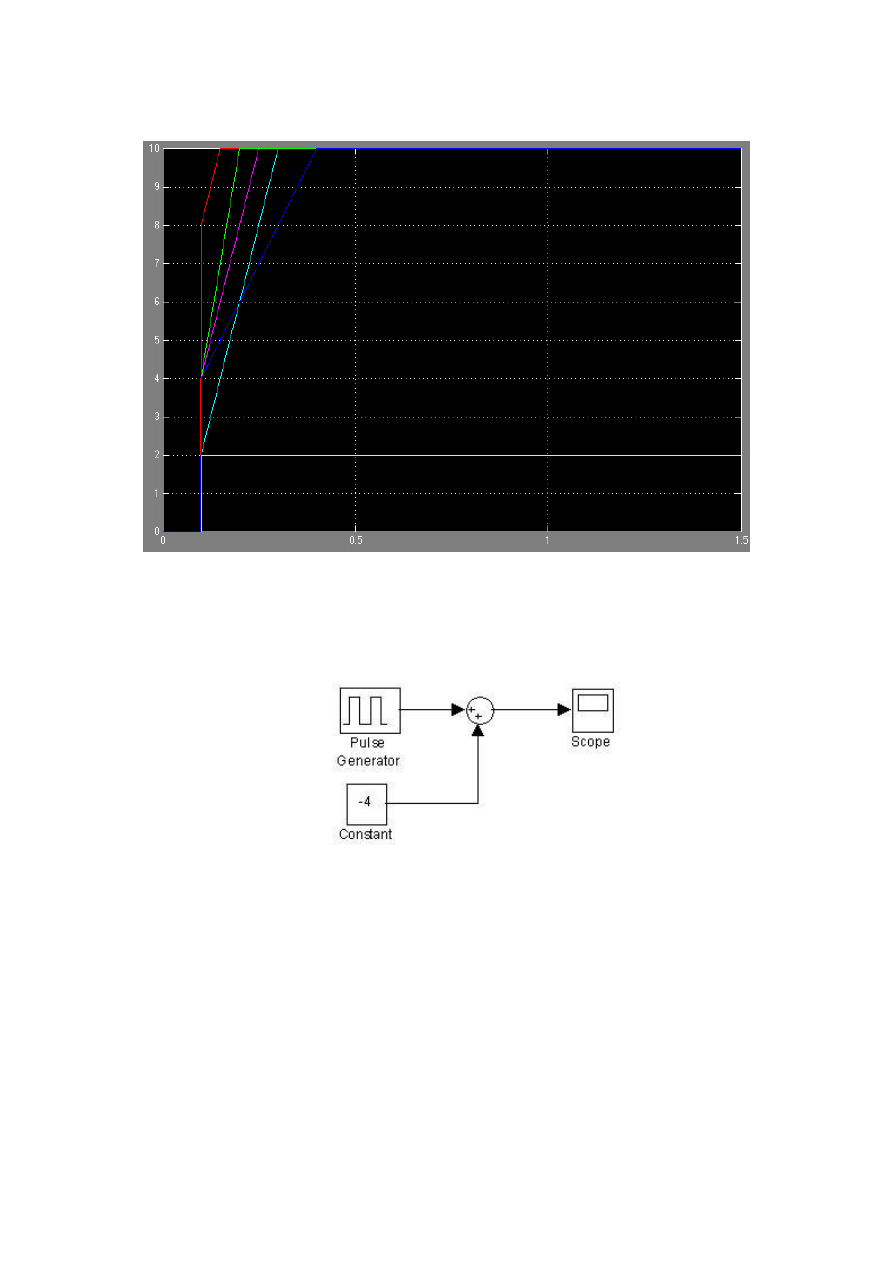
2.3 Generatory sygnału prostokątnego
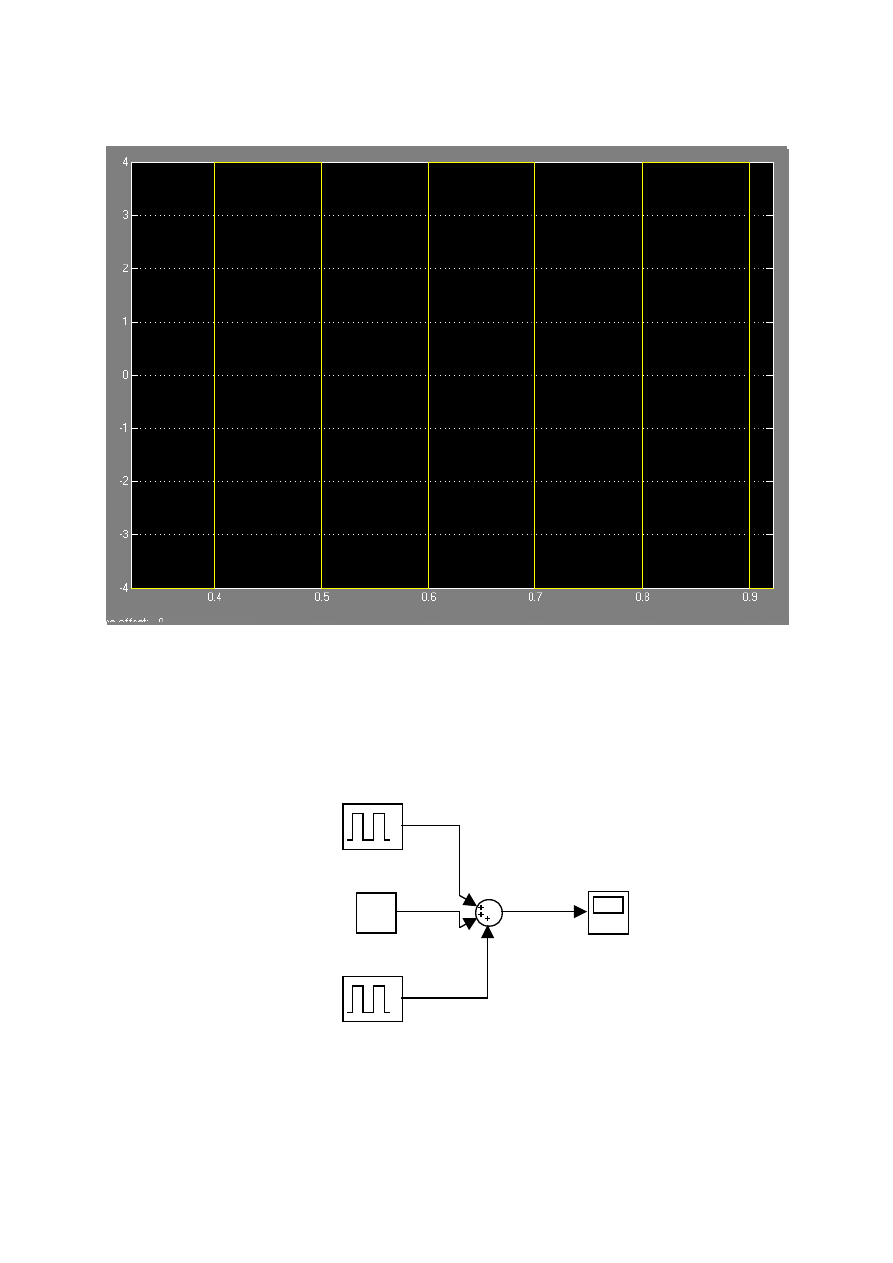
Dane: Generator: Amplitude=4, period =1/5; pulse width=25%
Generator1: Amplitude=4, period =1/5; pulse width=75%; Phase delay= -0.05
2.3.a.Schemat układu:
Scope
Pulse
Generator1
Pulse
Generator
-4
Constant
2.3.b.Zarejestrowane przebiegi:
2.3 Odpowiedź regulatora PI na przebieg prostokątny jak w punkcie 2.2
Dane: Generator : Amplitude=4, period =1/5; pulse width=75%; Phase delay= -0.25*1/5
PI1(fioletowy): (Kp=2.5, Ki=20, [Upper Lower]= [10 -10]); PI2(niebieski): (Kp=1, Ki=20, [Upper
Lower]= [10 -10]); PI3(czerwony): (Kp=4, Ki=20, [Upper Lower]= [10 -10]) ; PI4(zielony): (Kp=2.5,
Ki=30, [Upper Lower]= [10 -10]); PI5(granatowy): (Kp=2.5, Ki=10, [Upper Lower]= [10 -10])
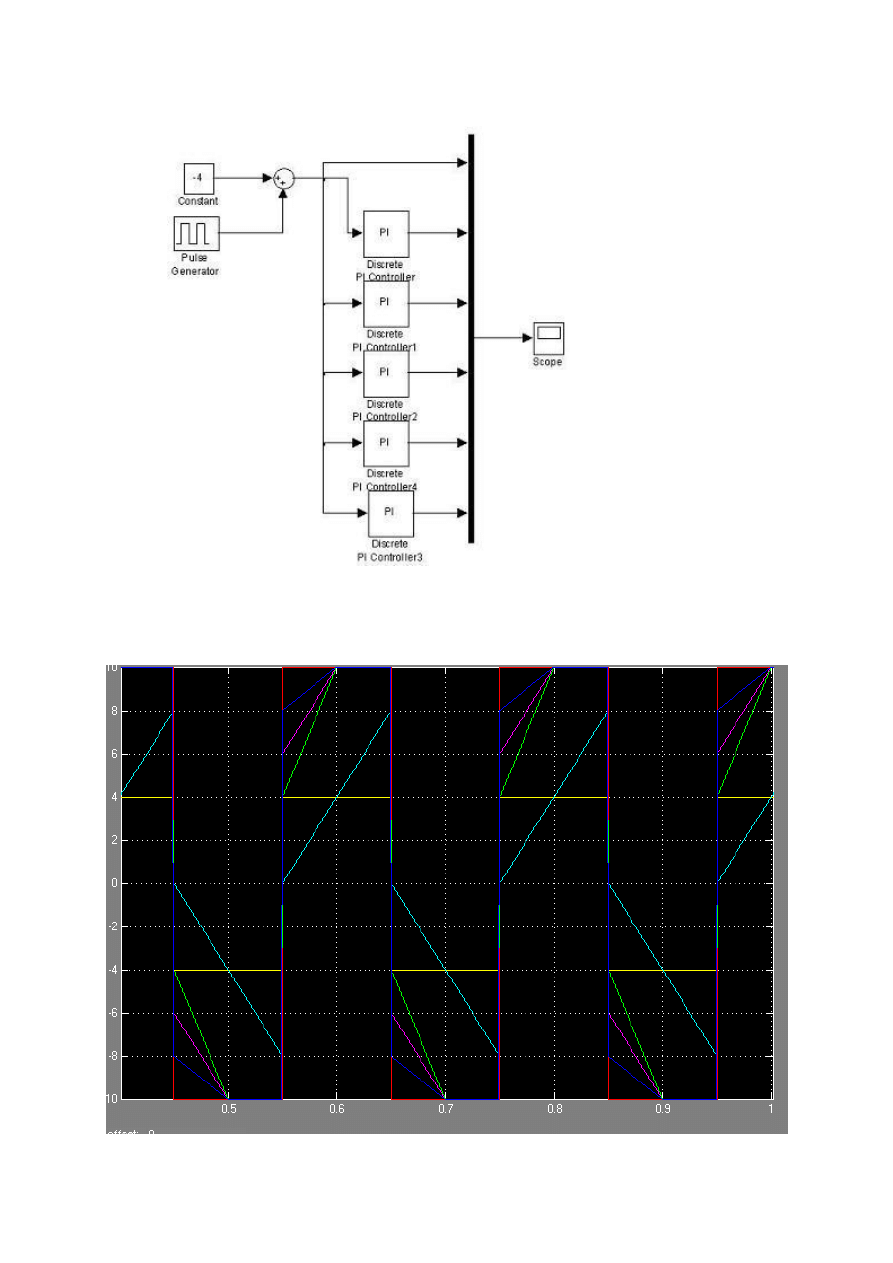
2.3.a. Schemat układu:
2.3.b. Zarejestrowane przebiegi:
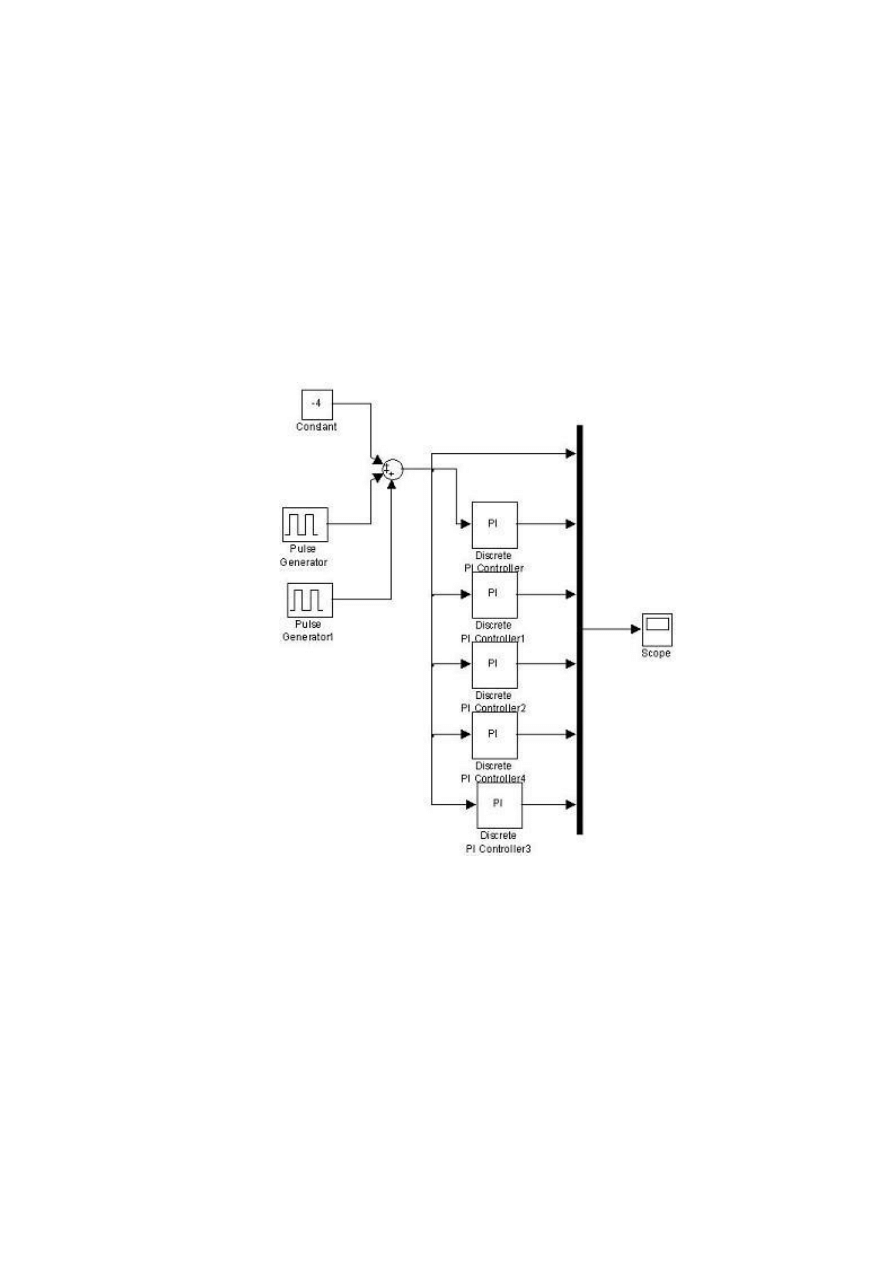
2.4 Odpowiedź regulatora PI dla różnych nastawieo regulatora i przebiegu prostokątnym jak w
punkcie 2.3
Dane: Generator: Amplitude=4, period =1/5; pulse width=75%; Phase delay= -0.05*0.025
Generator1 : Amplitude=4, period =1/5; pulse width=25%; Phase delay= -0.025
PI1(fioletowy): (Kp=0, Ki=20, [Upper Lower]= [10 -10]); PI2(niebieski): (Kp=1, Ki=20, [Upper Lower]=
[10 -10]); PI3(czerwony): (Kp=4, Ki=20, [Upper Lower]= [10 -10]); PI4(zielony): (Kp=2.5, Ki=30, [Upper
Lower]= [10 -10]); PI5(granatowy): (Kp=2.5, Ki=10, [Upper Lower]= [10 -10])
2.4.a.Schemat układu:
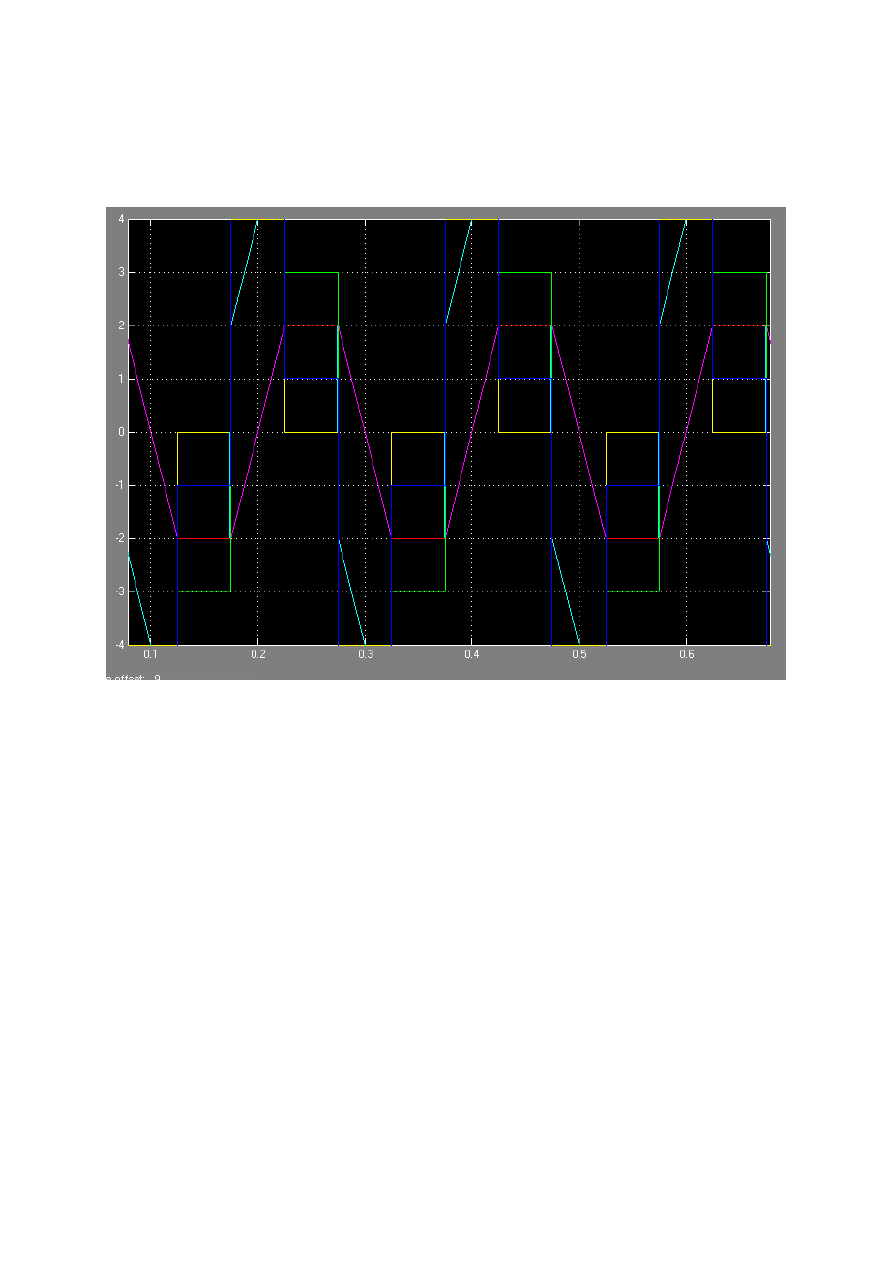
2.4.b.Zarejestrowane przebiegi:
3. Wnioski
Analizując odpowiedź regulatora PI na skok jednostkowy zauważono, że regulator po przejściu
przez wartośd zadaną zaczyna dalej narastad do uzyskania zadanej wartości Kp. Jeżeli sygnał
osiągnie już w/w wartośd kontynuuje narastanie sygnału do uzyskania zadanej wartości Ki, gdy
wartośd Ki zostanie już osiągnięta sygnał stabilizuje się i jest stały. Zmiana wartości Kp powoduje
podtrzymanie się sygnału wejściowego, co zauważono w przebiegu 2.1.2.b. Czym większy Kp tym
podtrzymanie sygnału w linii pionowej jest wydłużone do osiągnięcia zadanej wartości. Następnie
sygnał wzrasta liniowo do osiągnięcia wartości Ki. Generator daje nam możliwośd ustawienia
szerokości impulsu, wykorzystaną tą opcję w punkcie 2.3 i 2.4. W pierwszym przypadku
zastosowano jeden generator z 75% wypełnieniem. Układ zachowywał się podobnie jak w
przypadku podania skoku jednostkowego. Sygnały powtarzały się z większą częstotliwością
przechodząc w czasie 1 sekundy przez 3 pełne okresy. Porównując przebiegi 2.3 i 2.4 stwierdzam,
iż dokładając drugi generator o mniejszym wypełnieniu, odpowiedź regulatora pojawia się z
większą częstotliwością.
Wyszukiwarka
Podobne podstrony:
Badanie regulatora PI
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
04A Badanie regulacji dwupołożeniowej
L4 Układ regulacji ciągłej Badanie regulatorów
Badanie regulatorow nieliniowyc Nieznany
Badanie regulatora temp
Podstawy Automatyki Lab - 2010 - CW6, Badanie regulatora
Badanie regulatora temp(1)
Podstawy Automatyki Lab 2010 CW6 Badanie regulatora â¦
Badanie regulatorow ciaglych id Nieznany
Automatyka i sterowanie, regulatoryP,PI,PID, Akademia Techniczno-Humanistyczna
Badanie regulatora PID w układzie sterowania prędkością obrotową silnika prądu stałego
Regulator PI
scwus?danie regulatora PI
04A Badanie regulacji dwupołożeniowej
Badanie regulatorów ciągłych
więcej podobnych podstron