
POLITECHNIKA WARSZAWSKA
WYDZIAŁ TRANSPORTU
ul. Koszykowa 75, 00-662 Warszawa
ZAKŁAD STEROWANIA RUCHEM DROGOWYM
Do użytku wewnętrznego
LABORATORIUM
„URZĄDZENIA I SYSTEMY STEROWANIA
RUCHEM DROGOWYM”
ĆWICZENIE nr 4
TEMAT: Konfigurowanie mikroprocesorowego sterownika
acyklicznego
Instrukcja przygotowawcza (Wer.01)
Opracował:
dr inż. Marek Buda
mgr inż. Paweł Chrobot
mgr inż. Artur Kluźniak

Stanowisko składa się z:
•
Komputera PC z systemem operacyjnym Microsoft Windows 2000 i
zainstalowanymi aplikacjami A40proj.exe oraz A40sym.exe;
•
Sterownika ASTER 40/6 (połączony z komputerem kablem RS 232);
•
Czterech sygnalizatorów świetlnych podłączonych do czterech pierwszych wyjść
sterownika;
Zdjęcie 1. Stanowisko laboratoryjne
INSTRUKCJA PROGRAMOWANIA ACYKLICZNEGO STEROWNIKA
SYGNALIZACJI ŚWIETLNEJ ASTER 40/6. METODA REALIZUJĄCA
ALGORYTM STEROWANIA FAZOWEGO
Wstęp.
Poniższa instrukcja przedstawia zasady programowania mikroprocesorowego,
acyklicznego sterownika ASTER 40/6.
Opracowany został przykład projektu programu sygnalizacji świetlnej na
skrzyżowaniu zawierającym pięć grup sygnałowych (Rys.1.).
Do wprowadzania danych stworzonego projektu wykorzystano aplikacje A40proj.exe,
natomiast do testowania (wizualizacji) pracy programu aplikacje A40sym.exe.
2
1.1. Warunki pracy algorytmu sterowania sygnalizacją świetlną na
analizowanym skrzyżowaniu
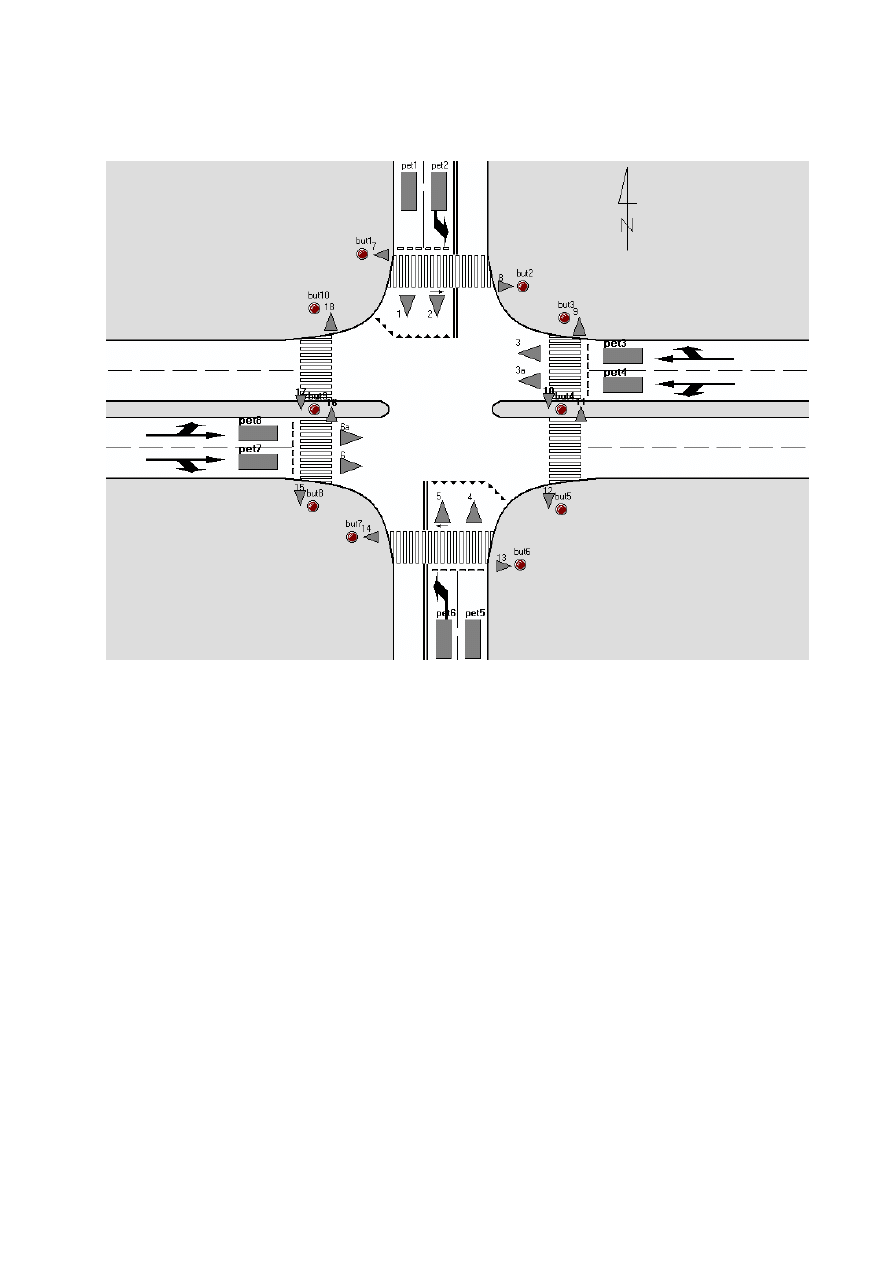
Rys. 1. Rysunek analizowanego skrzyżowania
Poniżej przedstawiono dane potrzebne do stworzenia programu acyklicznego,
akomodowanego według faz ruchu. Zamieszczony powyżej rysunek przedstawia
skrzyżowanie, do którego zaproponowany zostanie algorytm, schemat faz ruchu i
program sterowania sygnalizacją świetlną. Przedstawiono również zestaw programów
przejściowych międzyfazowych PMF n-m (gdzie „n” i „m” są punktami przejścia z fazy
„n” na fazę „m”).
Wlot wschodni i zachodni są wlotami priorytetowymi, dwupasmowymi, na których
odbywa się ruch na wprost, oraz odpowiednio z pasów skrajnych skręt w lewo i prawo.
Wlot północny i południowy realizuje ruch pojazdów na wprost i w prawo z pasa
prawego, natomiast pas lewy jest jedynie pasem skrętu w lewo.
Na wszystkich wlotach skrzyżowania zlokalizowano indukcyjne detektory pojazdów
(pet1-pet8). Na przejściach dla pieszych zaprojektowano przyciski dla pieszych (but1-
but10).
Do projektu załączono schemat faz ruchu wraz z ich wzajemnymi relacjami.
Podstawowy układ faz to: główna faza 1 oraz realizacja fazy 2 i 3. Ponadto w projekcie
3

zaproponowano możliwość wystąpienia fazy 4 realizującej grupę 1K w przypadku braku
zapotrzebowania na grupę pieszą 5P w celu umożliwienia bezkolizyjnego przejazdu dla
pojazdów z grupy 1K wlotu północnego i południowego.
1.2. Oznaczenia
W umieszczonej poniżej tabeli zamieszczone zostały opisy oznaczeń zastosowanych
w przedstawionym projekcie.
Nr i typ grupy sygnałowej Nr
sygnalizatora
Detektory
1 K
1,4
w1 = pet1 + pet5
2 K
2,5
w2 = pet2 + pet6
3 K
3,3a,6,6a
w3 = pet3 + pet4 + pet7 + pet8
4 P
7,8,13,14
w4 = but1 + but2 + but6 + but7
5 P
9,10,11,12,15,16,17,18
w5 = but3 + but4 + but5 + but8 +
+ but9 + but10
Tab. 1. Oznaczenia symboli i elementów skrzyżowania
1.3. Schemat faz ruchu
4P
4P
3K
3K
5P
5P
1K
1K
PMF 2-1
PMF 1-2
2K
2K
PMF 3-1
PMF 1-3
PMF 4-3
PMF 3-4
PMF 4-2
PMF
3
-2
PM
F 4
-1
FAZA 1
FAZA 2
FAZA 3
FAZA 4
PM
F 1-
4
PM
F
2-
3
1K
1K
Rys. 2. Schemat faz ruchu
4
1.4. Algorytm pracy sygnalizacji akomodacyjnej według faz sygnałowych,
wraz z modyfikacją czasów trwania sygnałów zielonych
Do zapisu algorytmu sterowania zastosowano następujące oznaczenia warunków
logicznych i czasowych.
Operator Opis
~
Negacja. Zmienia wartość wyrażenia
logicznego na przeciwną.
∗
Iloczyn wyrażeń logicznych.
+
Suma wyrażeń logicznych.
( )
Nawiasy zmieniają priorytet operatorów.
Tab. 2. Oznaczenia warunków logicznych
Warunek zapewniający ciągłość czasu: t
n
– czas trwania n fazy;
t
n
= t
n
+ 1
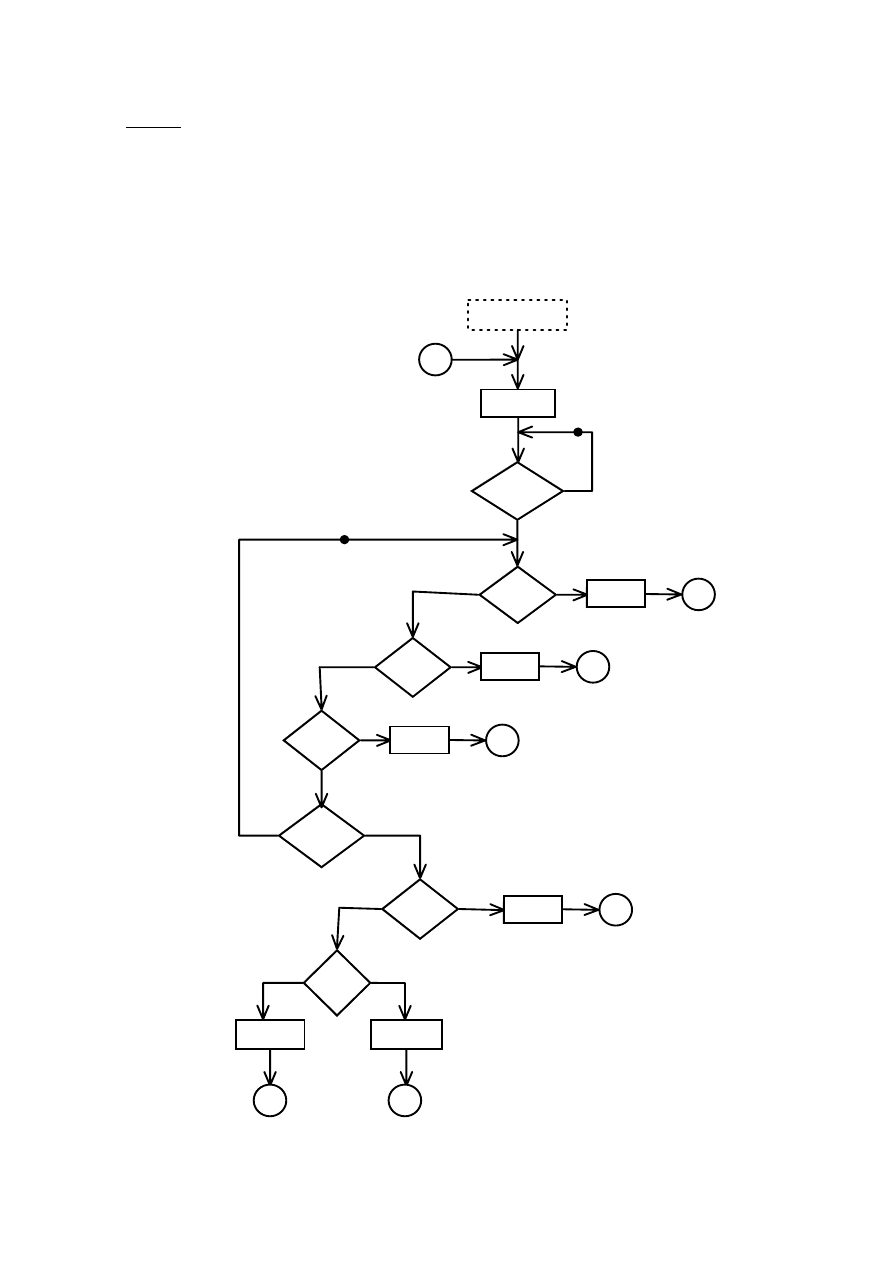
5
Faza 1
FAZA 1
t
1
= 0
A
1
1
T
t
≥
N
L1
T
PMF
1-3
C
T
L2
N
PMF
1-4
D
T
N
N
L5
N
T
N
PMF 1-2
PMF 1-3
C
B
L3
PMF
1-2
B
T
N
2
1
T
t
≥
N
L4
T
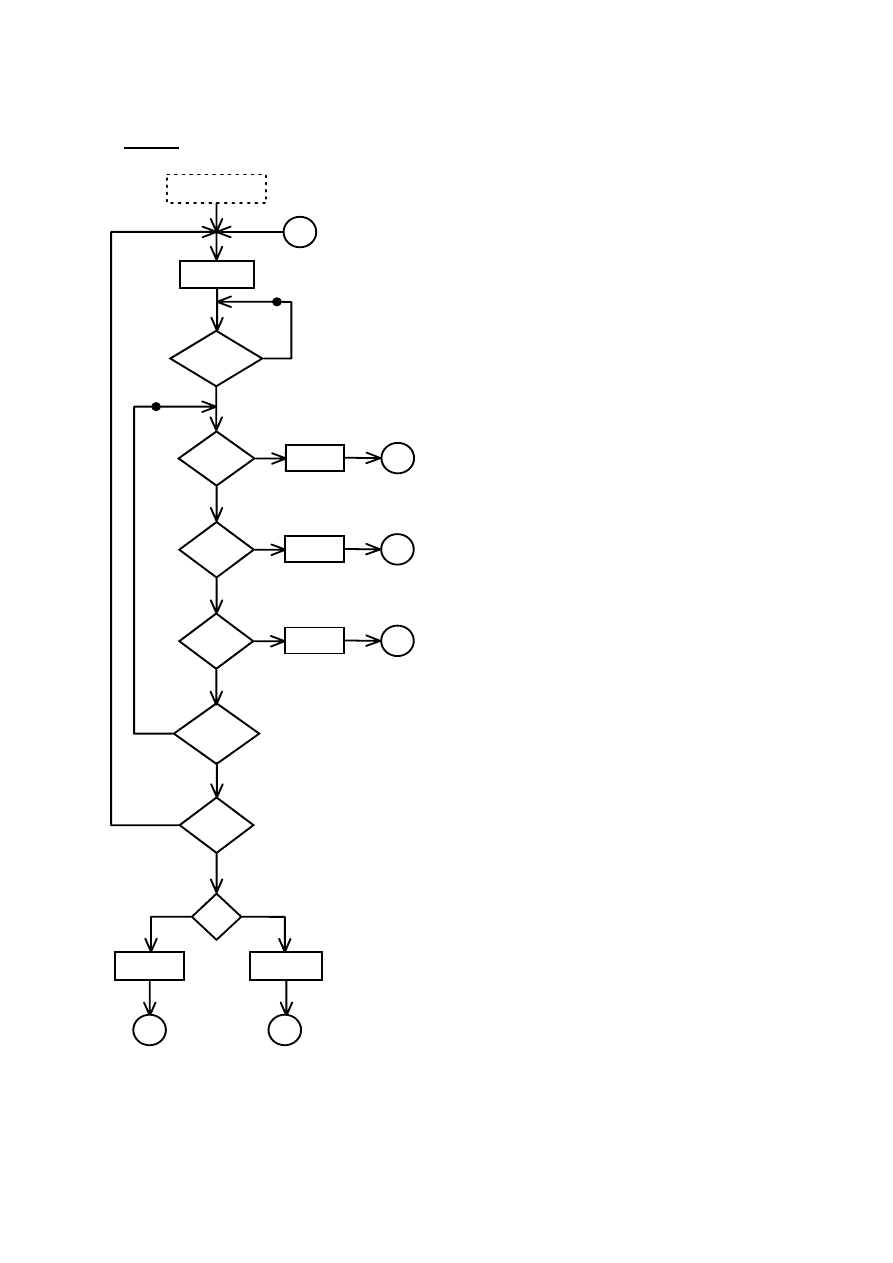
Rys. 3. Algorytm pracy sygnalizacji
podczas trwania fazy 1
Warunki czasowe:
T1 = minimalny czas fazy 1 = 14’’
T2 = maksymalny czas fazy 1 = 24’’
Warunki logiczne:
=
1
L
(
) ( )
2
3
~
w
w
∗
(
)
(
)
(
)
5
~
1
3
~
2
w
w
w
L
∗
∗
=
(
) (
)
5
1
~
3
~
3
w
w
w
L
+
∗
=
(
) (
) (
)
5
~
2
~
1
~
4
w
w
w
L
∗
∗
=
5
1
5
w
w
L
+
=
6
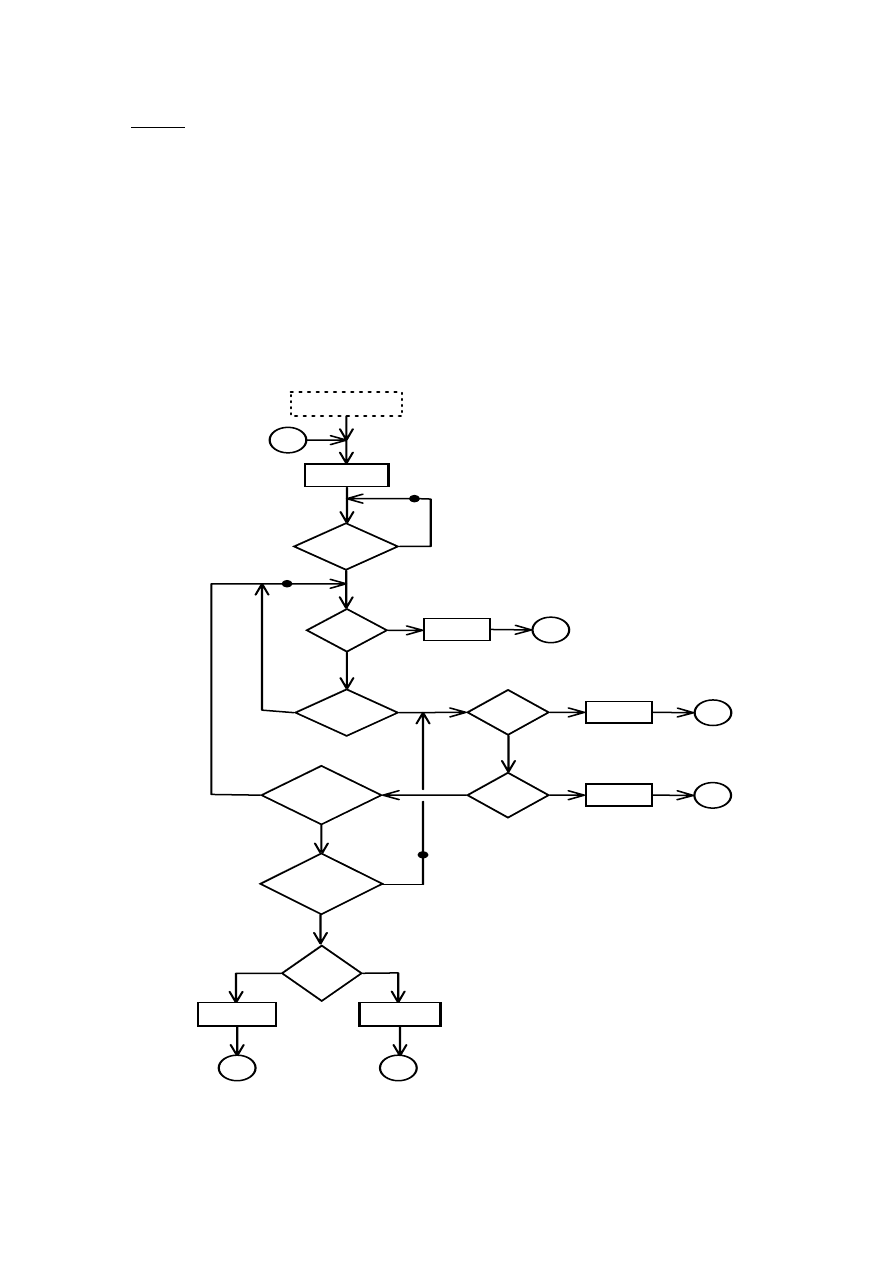
Faza 2
Warunki czasowe: Warunki logiczne:
T3 = minimalny czas fazy 2 = 16’’
=
6
L
(
) (
)
4
3
1
~
w
w
w
+
∗
T4 = maksymalny czas fazy 2 = 26’’
=
7
L
(
) ( )
2
1
~
w
w
∗
4
3
8
w
w
L
+
=
FAZA 2
t
2
= 0
B
3
2
T
t
≥
N
L6
T
PMF
2-1
A
T
L7
N
PMF
2-3
C
T
N
N
L8
T
T
N
PMF 2-1
PMF 2-3
C
A
4
2
T
t
≥
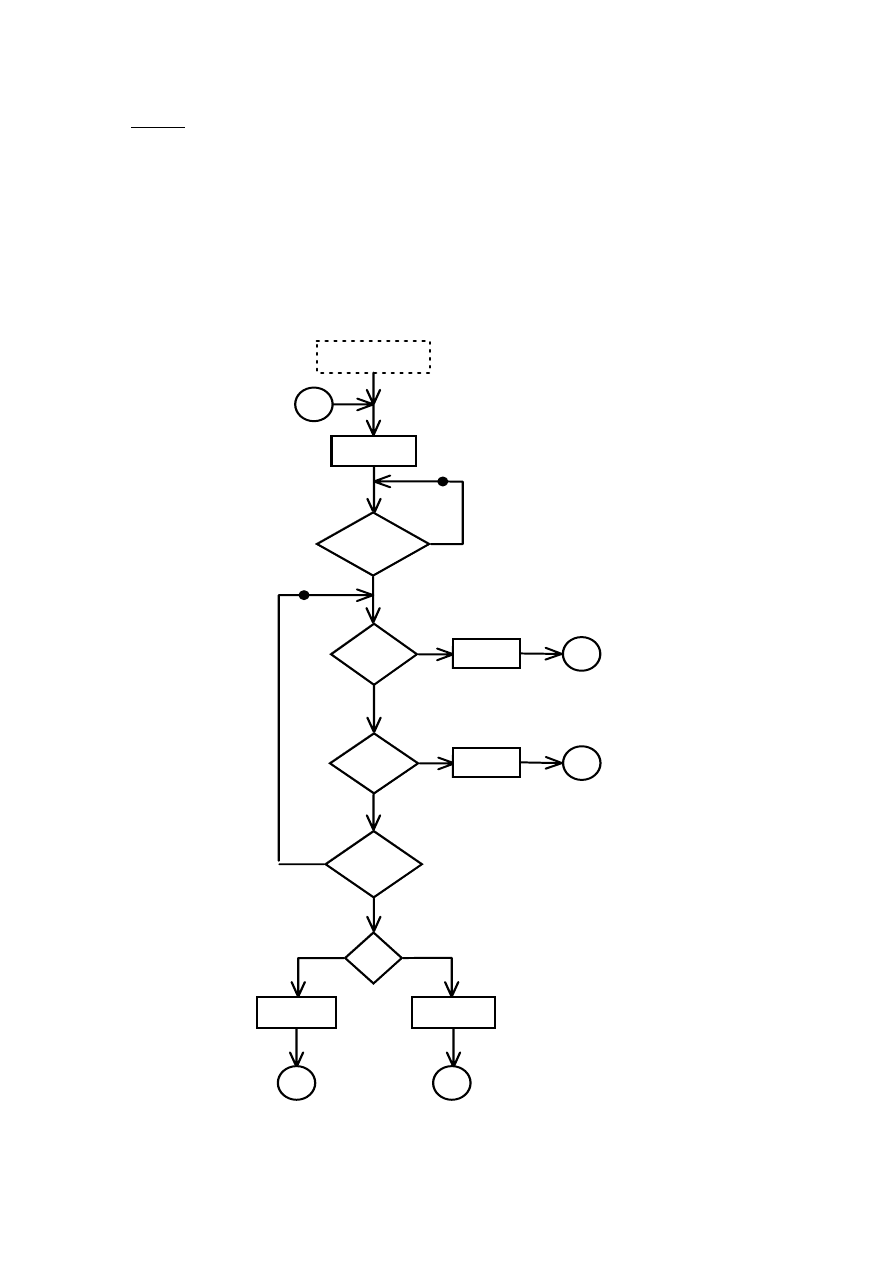
Rys. 4. Algorytm pracy sygnalizacji podczas trwania fazy 2
7
Faza 3
Warunki czasowe:
T5 = minimalny czas fazy 3 = 10’’
T6 = maksymalny czas fazy 3 = 16’’
Warunki logiczne:
=
9
L
(
) (
)
4
3 w
+
2
~
w
w
∗
)
)
=
10
L
(
)
(
(
)
5
~
1
2
~
w
w
w
∗
∗
=
11
L
(
) (
5
1
2
~
w
w
w
+
∗
=
12
L
4
3 w
w
+
(
)
5
~
1
13
w
w
L
∗
=
Rys. 5. Algorytm pracy sygnalizacji podczas trwania fazy 3
FAZA 3
t
3
= 0
C
5
3
T
t
≥
N
L9
T
PMF
3-1
A
T
L10
N
PMF
3-4
D
T
N
N
L13
N
T
N
PMF 3-4
PMF 3-2
B
D
L11
PMF
3-2
B
T
N
6
3
T
t
≥
T
L12
N
PMF
3-1
A
T
8
Faza 4
Warunki czasowe:
Warunki logiczne:
T7 = najwcześniejsze zakończenie fazy 4
przed skokiem do fazy 2 = 2’’
T8 = najwcześniejsze zakończenie fazy 4
przed skokiem do fazy 1 lub 3 = 8’’
T9 = najpóźniejsze zakończenie fazy 4
przed skokiem do fazy 2 = 12’’
T10 = maksymalny czas fazy 4 = 16’’
=
14
L
5
w
=
15
L
(
) (
)
4
3
1
~
w
w
w
+
∗
=
16
L
(
) ( )
2
1
~
w
w
∗
=
17
L
4
3 w
w
+
FAZA 4
t
4
= 0
D
7
4
T
t
≥
N
L14
T
PMF
4-2
B
T
L15
N
PMF
4-1
A
T
N
N
L17
T
N
PMF 4-1
PMF 4-3
C
A
8
4
T
t
≥
N
T
L16
PMF
4-3
C
T
N
T
N
T
9
4
T
t
≥
10
4
T
t
≥
Rys. 6. Algorytm pracy sygnalizacji podczas trwania fazy 4
9
Zasady funkcjonowania algorytmu
Faza 1.
Po przekroczeniu czasu minimalnego trwania fazy 1 „
1
T ”, sprawdzane są warunki
możliwego skrócenia fazy i skoku do następnej fazy poprzez odpowiedni przedział
międzyfazowy. Warunki
,
i
zawierają wyrażenie logiczne „
(
” – negacje
wzbudzenia detektorów przynależących do grupy 3K (bezpośrednio związanej z fazą 1).
Oznacza to, że przy braku zapotrzebowania na realizowaną grupę, możliwe jest skrócenie
trwania fazy 1 i skok do fazy 3, 4 lub 2. Wybór fazy następnej uwarunkowany jest
dodatkowym wyrażeniem logicznym zawierającym wzbudzenia odpowiednich grup;
np.
– występuje zapotrzebowanie na sygnał zielony dla grupy 1K przy braku
dla grupy 5P; następuje skok do fazy 4 poprzez przedział międzyfazowy PMF 1-4.
1
L
2
L
3
L
)
))
3
~ w
(
(
5
~
1
w
w
∗
Jeżeli warunki
,
i
są fałszywe, faza 1 trwa do momentu „
1
L
2
L
3
L
2
T ” – czas
maksymalny fazy. W chwili osiągnięcia tej wartości sprawdzany jest warunek logiczny
. Umożliwia on przy braku zapotrzebowania na sygnał zielony dla którejkolwiek grupy
na kierunku poprzecznym, wznowienie realizacji fazy 1. W przypadku nie spełnienia tego
warunku sprawdzany jest warunek końcowy skoku
.
4
L
5
L
Faza 2.
Algorytm trwania fazy 2 jest wizualnie podobny do algorytmu fazy 1. Różnice są w
wartościach trwania poszczególnych stanów, oraz w ilości i opisie wyrażeń logicznych
warunkujących skracanie fazy i skoki do następnych faz. Warunki
i
podobnie jak
w fazie 1 sprawdzają brak zapotrzebowania realizowania bieżącej fazy 2, oraz możliwość
wyboru skoku między fazą 1 bądź 3. Nie występuje również warunek umożliwiający
wznowienie realizacji fazy 2, jak to ma miejsce w fazie 1.
6
L
7
L
Warunek końcowy skoku
sprawdza te same wzbudzenia detektorów, co w
, lecz
bez warunku umożliwiającego skrócenie trwania fazy (
8
L
6
L
( )
1
~ w
).
Faza 3.
W przedziale tym znajduje się jedynie grupa kołowa 2K, w celu umożliwienia
bezkolizyjnego skrętu pojazdów z wlotu północnego i południowego.
Warunki
,
i
skracają w razie potrzeby fazę 3 i umożliwiają przejście do
fazy 1, 4 lub 2, w zależności od zapotrzebowania na światło zielone dla odpowiedniej
grupy.
9
L
10
L
11
L
10
Jeżeli nie nastąpi wcześniejsza zmiana fazy, po przekroczeniu maksimum czasu trwania
fazy T6, możliwy jest skok do fazy 1, 4 lub 2. Przejście do fazy 1, odbywać się będzie, gdy
wystąpi zapotrzebowanie na sygnał zielony dla grupy 3K lub 4P. Jeżeli nie będzie
spełniony warunek
, sprawdzane będzie wzbudzenie detektorów przypisanych do
grupy 1K i 5P. Przy afirmacji
i negacji
nastąpi skok do fazy 4, w innym wypadku
do fazy 2.
12
L
1
w
5
w
Faza 4.
W fazie 4 zezwolenie na ruch otrzymują jedynie pojazdy z grupy 1K. Od fazy 2 różni
się brakiem zezwolenia na przejście dla pieszych z grupy 5P. Jednak w momencie
wzbudzenia przycisku dla pieszych z tej grupy, w przedziale czasu trwania fazy 4
sekundy, momentalnie nastąpi przeskok do fazy 2. Oprócz tej alternatywy
jest możliwość, w razie braku potrzeby kontynuowania bieżącej fazy 4 (~w3), zakończenie
jej realizacji i przejście do fazy 1 lub 3, w zależności od spełnienia warunku
lub
.
Warunek
sprawdzany jest w wypadku nie spełnienia wcześniejszych
warunków i uzyskania przez fazę maksymalnego czasu równego T11 = 16 sekund.
12
2
9
8
÷
=
÷ T
T
15
L
16
L
4
3
17
w
w
L
+
=
1.5. Generator programów sygnalizacji świetlnej A40proj
Tak przygotowany projekt (schemat faz, algorytm pracy sygnalizacji, warunki czasowe
faz i funkcje logiczne warunkujące możliwe skoki do faz następnych) można zacząć
wprowadzać do aplikacji A40proj.exe. Do tego zestawu danych należy również wcześniej
przygotować tablice czasów międzyzielonych, oraz wykres czasowy przejść
międzyfazowych. Dane te przedstawione są w dalszej części instrukcji oprogramowania
sterownika ASTER 40, w punktach opisujących ich wprowadzanie.
11
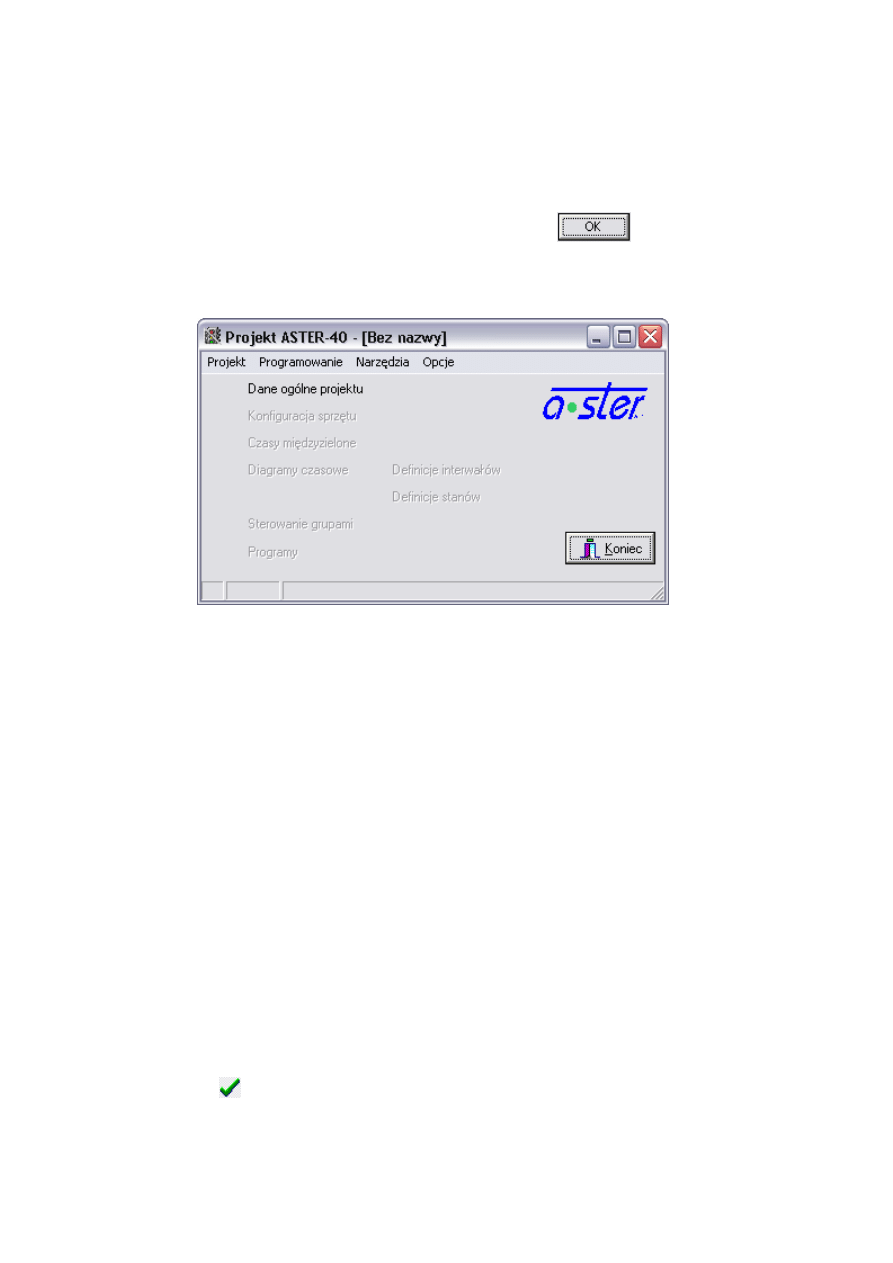
1.6. Tworzenie nowego projektu w aplikacji A40proj.exe
Uruchomienie generatora oprogramowania sterownika ASTER40 możliwe jest poprzez
włączenie aplikacji A40proj.exe. Po starcie programu pojawia się okno ostrzeżenia,
informujące o braku konfiguracji projektu. Przyciskiem
zamykamy okno
ostrzeżenia, poczym pojawia się okno główne aplikacji (rys.7.)
Rys. 7. Okno główne aplikacji A40proj.exe
Utworzenie nowego projektu możliwe jest przez wybranie polecenia z paska menu
głównego (Projekt/Nowy), lub poprzez kombinacje klawiszy [Ctrl+N].
W każdym momencie tworzenia projektu możliwe jest zapisanie go poleceniem
Projekt/Zapisz jako…, używając kombinacji klawiszy [Ctrl+S].
Okno główne, pełniące rolę centrum zarządzania całym projektem oprogramowania
sterownika, składa się z 8 tzw. formularzy. W prezentowanym projekcie programu
akomodowanego według faz ruchu wprowadzono wymagane dane do pięciu z tych
formularzy. Wypełnienie okien „Definicje interwałów”, „Definicje stanów” i „Sterowanie
grupami” wymagane jest w programowaniu akomodowanym realizującym algorytm
sterowania grupami.
Formularze należy wypełniać chronologicznie począwszy od pierwszego „Dane ogólne
projektu”. Uniemożliwiony jest dostęp do formularzy następnych, jeżeli nie będą
wypełnione poprzednie. Każdy poprawnie wypełniony formularz spowoduje odznaczenie
go symbolem „
”. Natomiast błędnie zdefiniowany etap zaznaczony będzie na czerwono
i dodatkowo w stopce okna będzie informacja „Błędy!”.
12
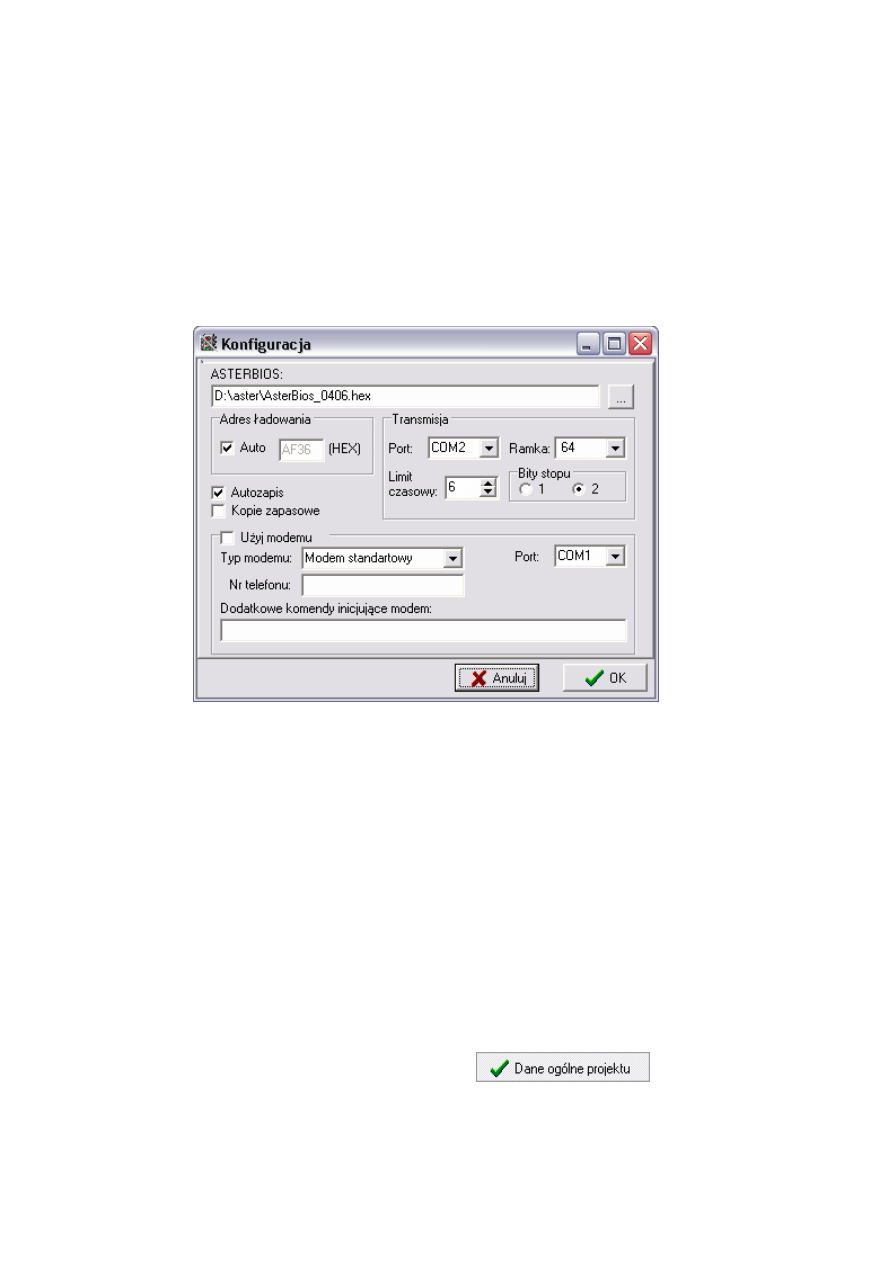
1.7. Określenie opcji łączenia i transmisji danych do sterownika
Po utworzeniu nowego projektu, ustawia się parametry konfigurujące projekt.
Określenie tych danych możliwe jest w oknie „Konfiguracja”, wywołanym poprzez
polecenie „Opcje” z paska menu głównego.
Pola zakładki należy wypełniać zgodnie z rys.8.
Rys. 8. Okno „Konfiguracja”
W polu „ASTERBIOS” podano miejsce na dysku, gdzie umieszczony jest plik
AsterBios_0406.hex. Następnie „Adres ładowania” odznaczono w okienku „Auto”.
Parametry „Transmisji” wypełniono następująco: „Port” – „COM2”, „Ramka” – „64”.
Zaznaczone pole „Autozapis” określa, czy przed ładowaniem programu do sterownika
odbędzie się automatyczny zapis projektu na dysku.
1.8. Wprowadzanie danych ogólnych projektu
Pierwszym formularzem generatora jest okno
. Wpisuje się tu
dane identyfikacyjne projektu. Niezbędne jest wypełnienie pól „Programista” i
„Projektant”. Zaprezentowano to na poniższej ilustracji (rys.9).
13
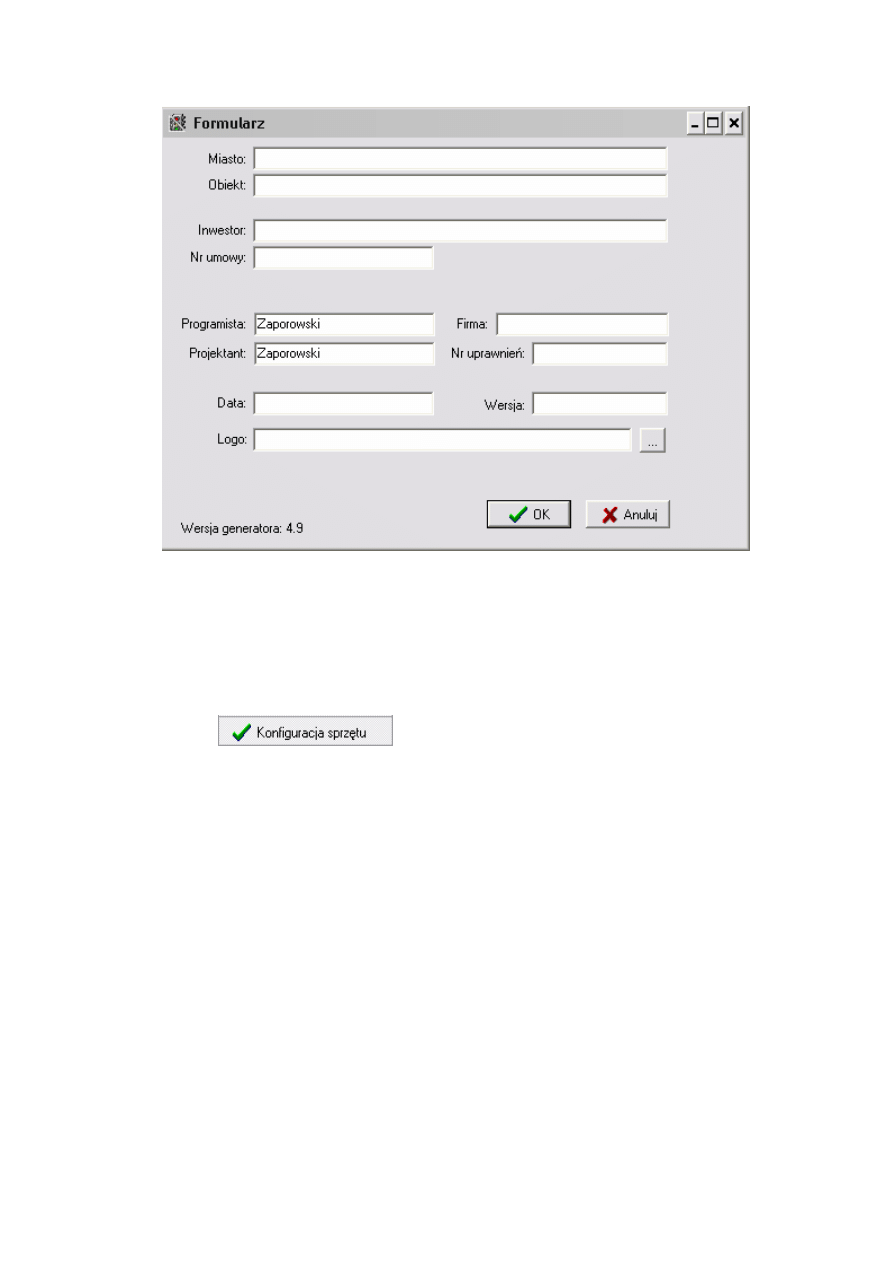
Rys. 9. Okno „Formularz”
1.9. Konfiguracja sprzętu
Formularz
zawiera definiowanie podstawowych parametrów
sterownika wraz z dodatkowym wyposażeniem (detektory, modemy itp.). Okno posiada 5
zakładek, z których każda konfiguruje określone grupy sprzętowe. W opracowywanym
projekcie wypełnione zostały trzy pierwsze zakładki. Nie było potrzeby definiowania
„Detektorów wirtualnych”, oraz konfigurowania modemów w zakładce „Komunikacja”.
1.9.1. Typ pracy
Zakładka „Typ pracy” zawiera pola konfigurujące podstawowe ustawienia sterownika.
W oknie tym między innymi wybiera się: wersję sterownika, którym posługiwano się w
laboratorium (ASTER-40/6); sterowanie fazami jako typy wprowadzanych później
programów; typ pracy sterownika jako izolowany tzn. pracujący samodzielnie,
niekoordynujący się z innymi sterownikami. Resztę parametrów wypełnia się zgodnie z
rys.10:
14
Rys. 10. Zakładka „Tryb pracy” okna „Konfiguracja sprzętowa”
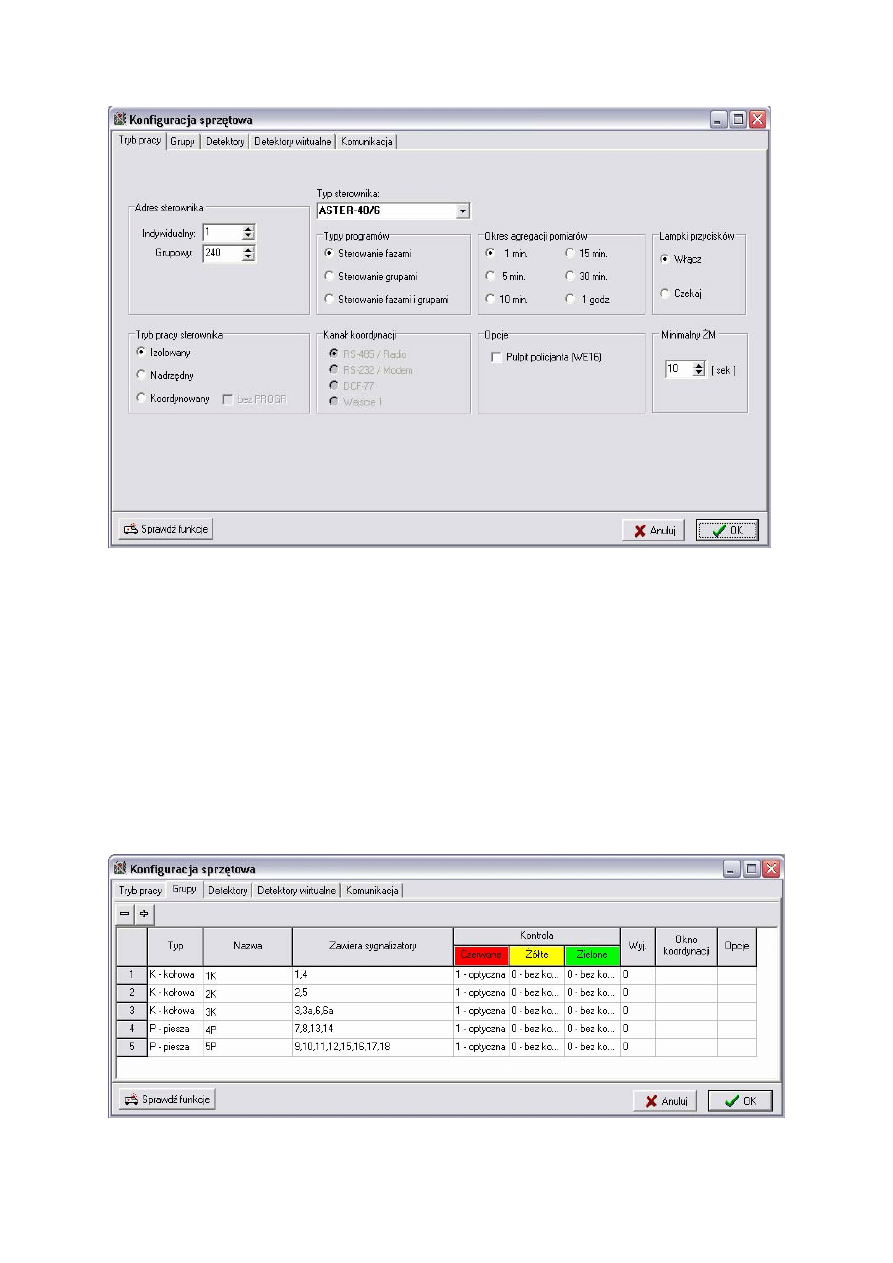
1.9.2. Grupy
Po wybraniu zakładki „Grupy” definiuje się, wcześniej przygotowane do projektu
grupy sygnałowe. Przedstawia to poniższy rysunek (rys.11).
Rys. 11. Zakładka „Grupy” w oknie „Konfiguracja sprzętowa”
15
W zilustrowanych wierszach zakładki przedstawione są dane do opracowywanych
pięciu grup sygnałowych.
Kolejne grupy dodawane są za pomocą przycisku „+”, a w razie potrzeby usuwane
przyciskiem „-”: „
”.
W pierwszej kolumnie opisane są typy poszczególnych grup. Podanie ich możliwe jest
poprzez rozwinięcie odpowiedniego okienka:
Następna kolumna podaje nazwy grup, identyfikujące je dla całego projektu.
Trzecia kolumna zawiera numery sygnalizatorów należących do grupy.
Numery sygnalizatorów i nazwy grup importowane są do programu A40sym.
Kolumna „Kontrola” określa sposób nadzoru poszczególnych torów grupy w
przypadku uszkodzenia obwodów zewnętrznych. W prezentowanym projekcie
zaproponowane zostało rozwiązanie: dla sygnału czerwonego „1” – optyczna tzn. w
przypadku uszkodzenia jest wyświetlana na wyświetlaczu sterownika informacja o
uszkodzeniu oraz na panelu wyjściowym szybko miga lampka należąca do uszkodzonego
toru; dla sygnału żółtego i zielonego ustawiono „0” co oznacza, że tor nie jest
nadzorowany. Możliwe są dodatkowo sposoby wyboru opcji nadzoru danego toru grupy:
„2” – ŻM (uszkodzenie obwodów zewnętrznych powoduje przełączenie na program
żółtego migacza), oraz 3 – wyłączenie (uszkodzenie powoduje wyłączenie wszystkich grup
sygnałowy).
1.9.3. Detektory
Zakładka „Detektory” prezentuje konfiguracje detektorów przypisanych do
odpowiednich grup sygnalizacyjnych. Przedstawia to rys.12.
16
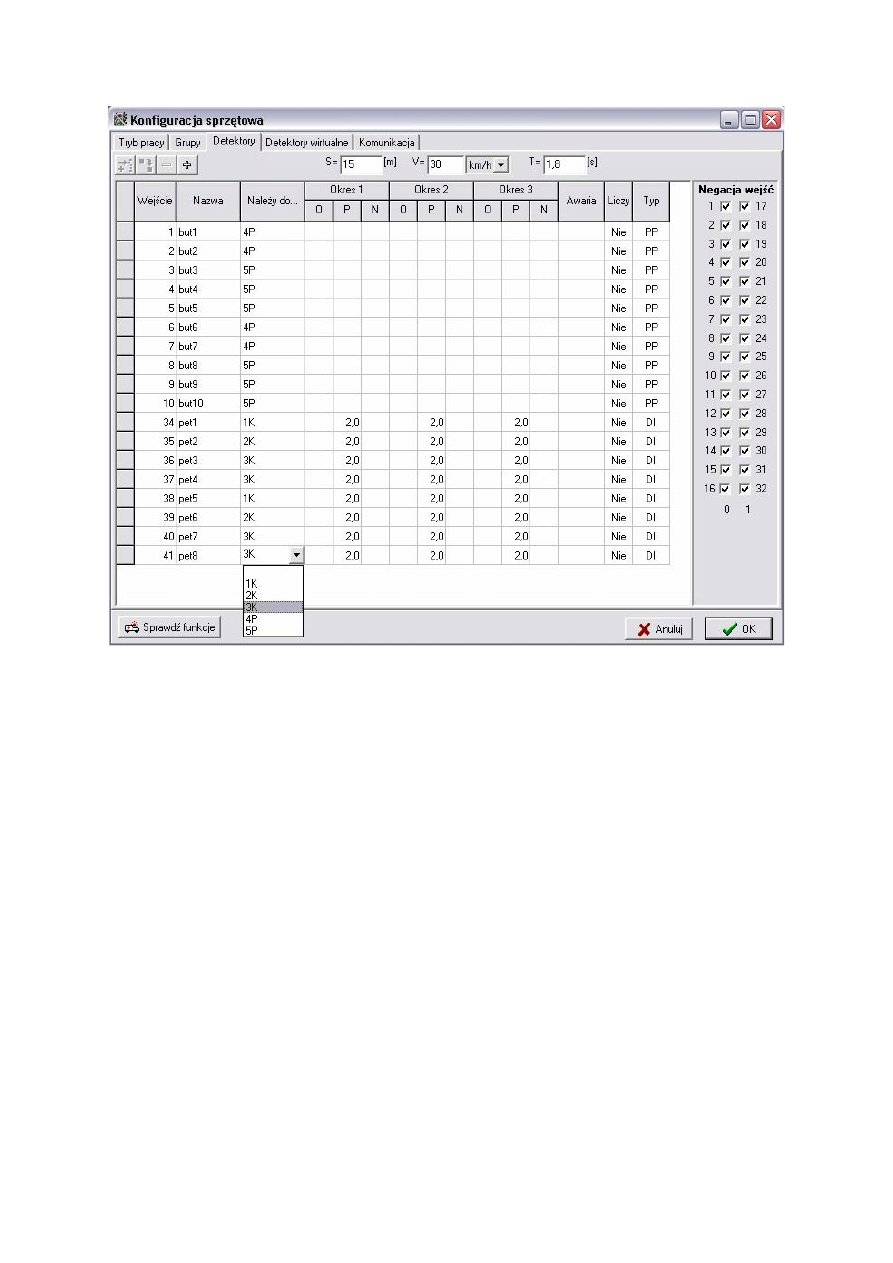
Rys. 12. Zakładka „Detektory” okna „Konfiguracja sprzętowa”
Dodawanie nowych detektorów odbywa się, podobnie jak w poprzedniej zakładce,
poprzez przycisk „+” (w lewym górnym rogu).
Pierwsza kolumna podaje numer wejścia danego detektora. Podczas konfiguracji należy
pamiętać o kilku właściwościach sterownika:
Nie powinno się używać wejścia numer 0, gdyż oznacza ono wirtualny detektor
ciągle wzbudzony;
Przyciski dla pieszych należy przypisać do numerów 1 ÷ 32 (wejścia dwustanowe);
Detektory inteligentne, w tym powszechnie używane pętle indukcyjne należy
przypisywać do numerów od 34 do 255;
Wejścia o numerze 59 nie należy używać;
W projekcie użyto dziesięciu przycisków dla pieszych, oraz ośmiu pętli indukcyjnych.
Nazwy ich podane są w drugiej kolumnie zakładki (przyciski – but 1 ÷ 10, pętle – pet 1 8).
÷
W kolumnie „Należy do…” zaznaczone zostały przynależności detektorów do
odpowiednich grup sygnałowych. Wybór grupy można dokonać poprzez rozwinięcie
okienka w odpowiednim wierszu (przedstawiono to na rys.12).
17
Podczas opracowywania programów acyklicznych sygnalizacji świetlnej na
rzeczywistych skrzyżowaniach zadaniem projektanta jest wprowadzenie odpowiednich
wartości w kolumnach „Okres1”, „Okres2”, „Okres3”. Definiuje się w nich czasy: T
O
–
czas opóźnienia, T
P
– czas podtrzymania, T
N
– czas nieczułości dla detektorów
inteligentnych. Dane projektu stworzone zostały w celu dydaktycznym i będą testowane
jedynie w pomieszczeniu laboratoryjnym. Skutkiem nie używania fizycznych detektorów
jest brak potrzeby określania wyżej wymienionych zmiennych czasowych. W dalszej
części testowania programu będziemy mieli wpływ na wzbudzenia detektorów i wartości te
będą zależne tylko i wyłącznie od naszej ingerencji. Należy jednak pamiętać, że w
przypadku detektorów inteligentnych w kolumnach pod zmienną „P” trzeba wpisać jakąś
wartość (np.2,0).
W kolumnie nazwanej „Typ” wybrane zostały rodzaje detektorów, jakie zostały użyte
w projekcie. Przyciski dla pieszych mają swoje odzwierciedlenie w skrócie „PP”. W tego
rodzaju detektorach wzbudzenie powinno być zapamiętywane w pamięci sterownika do
momentu obsługi grupy z nimi związanej. Parametr ten należy uwzględnić przy
późniejszym definiowaniu danych przedziałów w programie. Wykorzystane w projekcie
detektory mające formę pętli indukcyjnych oznaczone są jako „DI” – detektory
inteligentne. Są one programowane dynamicznie, w zależności od aktualnego stanu
algorytmu sterowania. W oprogramowaniu A40proj możliwe jest również wykorzystanie
następujących typów detektorów: „BL” – detektory blokujące, „DP” – detektory
pamiętające, „DR” – detektor radarowy lub podczerwony.
Z prawej strony zakładki jest pole „Negacja wejść” służące do ustalania poziomu
logicznego wejść dwustanowych o numerach od 1 do 32. Podobnie jak z detektorami
inteligentnymi, funkcja ta ma jedynie zastosowanie używając detektorów fizycznych.
Polega to na tym, że aktywny stan wejścia powoduje płynący przez nie prąd. Odznaczenie
pola wyboru przy odpowiednim numerze wejścia powoduje odwrócenie jego logiki
działania, tzn. wejście będzie aktywne przy braku płynącego przez nie prądu.
1.10. Tablica minimalnych czasów międzyzielonych
Trzecim formularzem generatora oprogramowania sterownika ASTER-40 jest
. W tym miejscu wprowadza się wcześniej przygotowane do
projektu zależności czasowe pomiędzy poszczególnymi grupami sygnałowymi. Na rysunku
nr.13 przedstawiono wypełnioną tablicę z wyznaczonymi minimalnymi czasami
miedzyzielonymi.
18
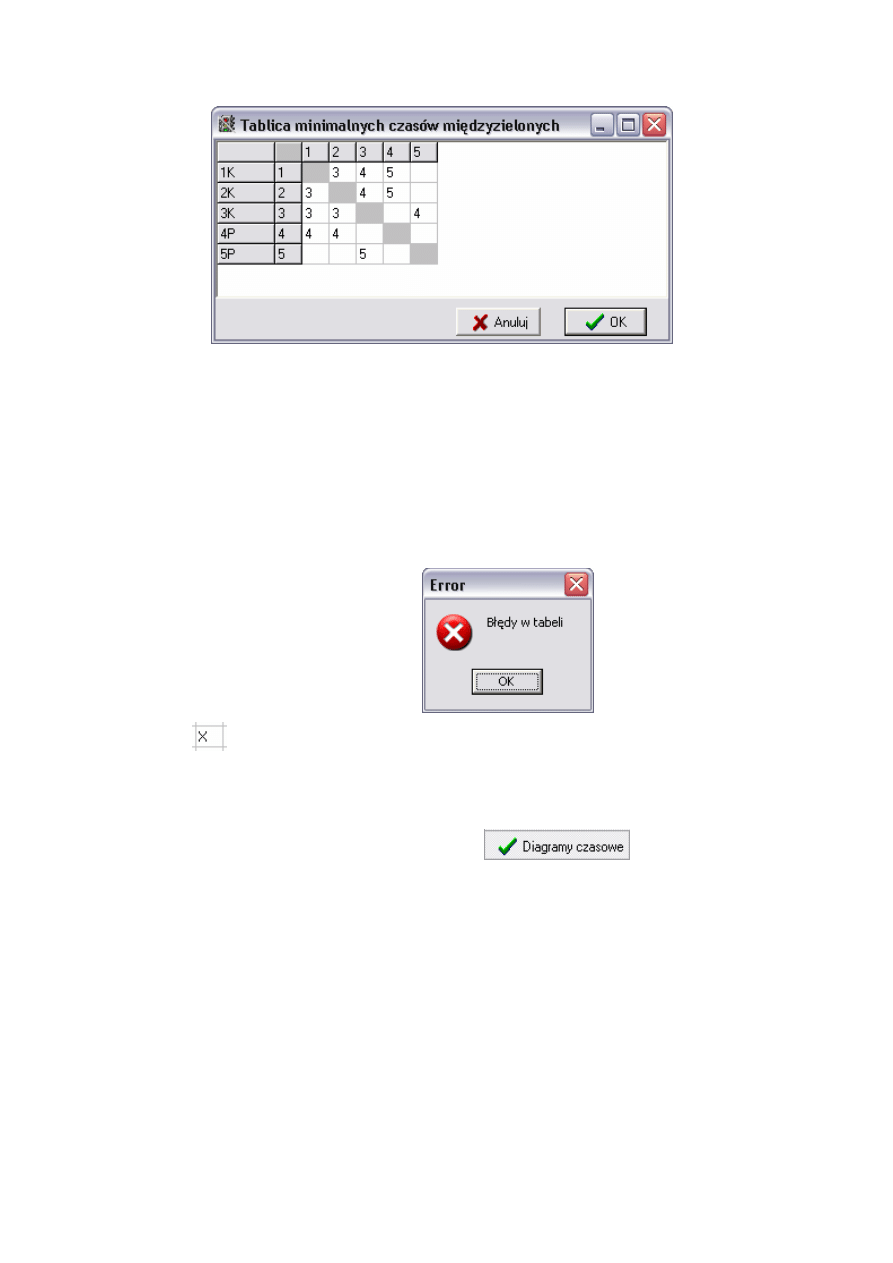
Rys. 13. Formularz „Tablica minimalnych czasów międzyzielonych”
Przedstawiony formularz, zawierający tablicę minimalnych czasów międzyzielonych
posiada kontrolę poprawnego, symetrycznego wypełnienia. Zgodność wpisanych czasów
nadzorowana jest podczas zamykania formularza. W przypadku braku symetrii
wprowadzonych czasów międzyzielonych sygnalizowany jest błąd:
i znakiem
wskazywane są pola, gdzie brakuje wpisu.
1.11. Diagramy czasowe
Czwartym formularzem programu A40proj jest
. Przeznaczony jest
do tworzenia i modyfikacji programów sygnalizacji. W metodzie sterowania
akomodowanego realizującego algorytm sterowania fazami, programy zapisuje się za
pomocą oddzielnych diagramów czasowych poszczególnych faz i przedziałów
międzyfazowych.
Rysunek umieszczony poniżej (rys.14) prezentuje znaczenie wszystkich widocznych w
głównym oknie przycisków i mechanizmów służących do tworzenia programów.
Widoczna jest również zakładka przedstawiająca program wejściowy, jaki powinien być
uwzględniony w projekcie. Jego tworzenie wytłumaczone jest w dalszej części instrukcji.
19
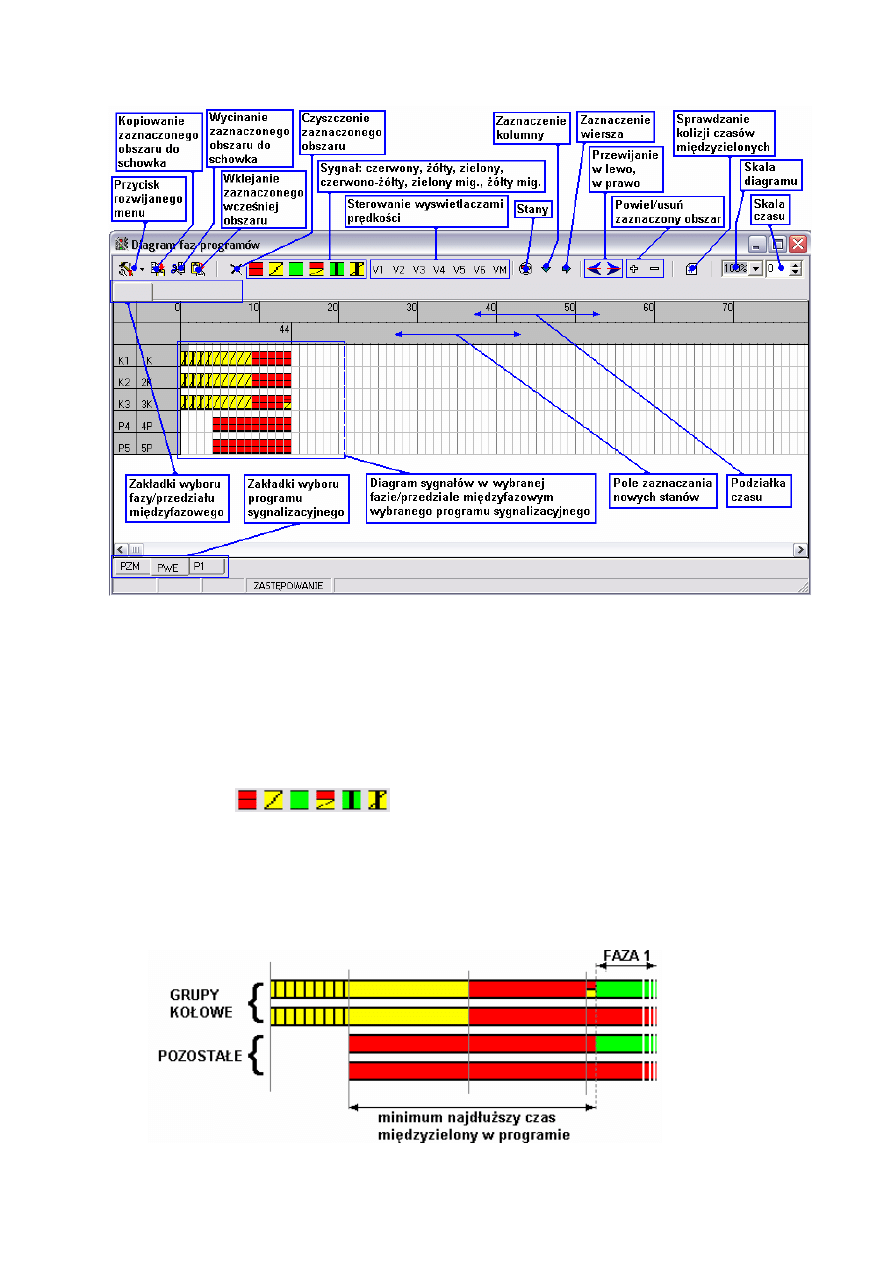
Rys. 14. Formularz „Diagram faz ruchu” z widocznym programem wejściowym
Wprowadzanie diagramów czasowych odbywa się poprzez rysowanie kolorowych
pasków w polu, które ma postać siatki. W górnej części siatki umieszczona jest skala czasu
z jednosekundowym krokiem. Rysowane paski odzwierciedlają kolory sygnałów
wyświetlanych dla danej grupy. Wprowadza się je zaznaczając na szaro, za pomocą
myszki, obszar i nadając mu później odpowiedni kolor. Służą temu przyciski umieszczone
w górnym menu:
.
Pierwszym krokiem podczas wprowadzania programu sygnalizacji świetlnej jest
narysowanie diagramu dla programu wejściowego. Po uruchomieniu formularza „Diagram
faz programów” pierwszą otwartą zakładką jest „PWE”. Miejsce to przeznaczone jest do
narysowania programu wejściowego, według następującego schematu:
Rys. 15. Schemat programu wejściowego
20
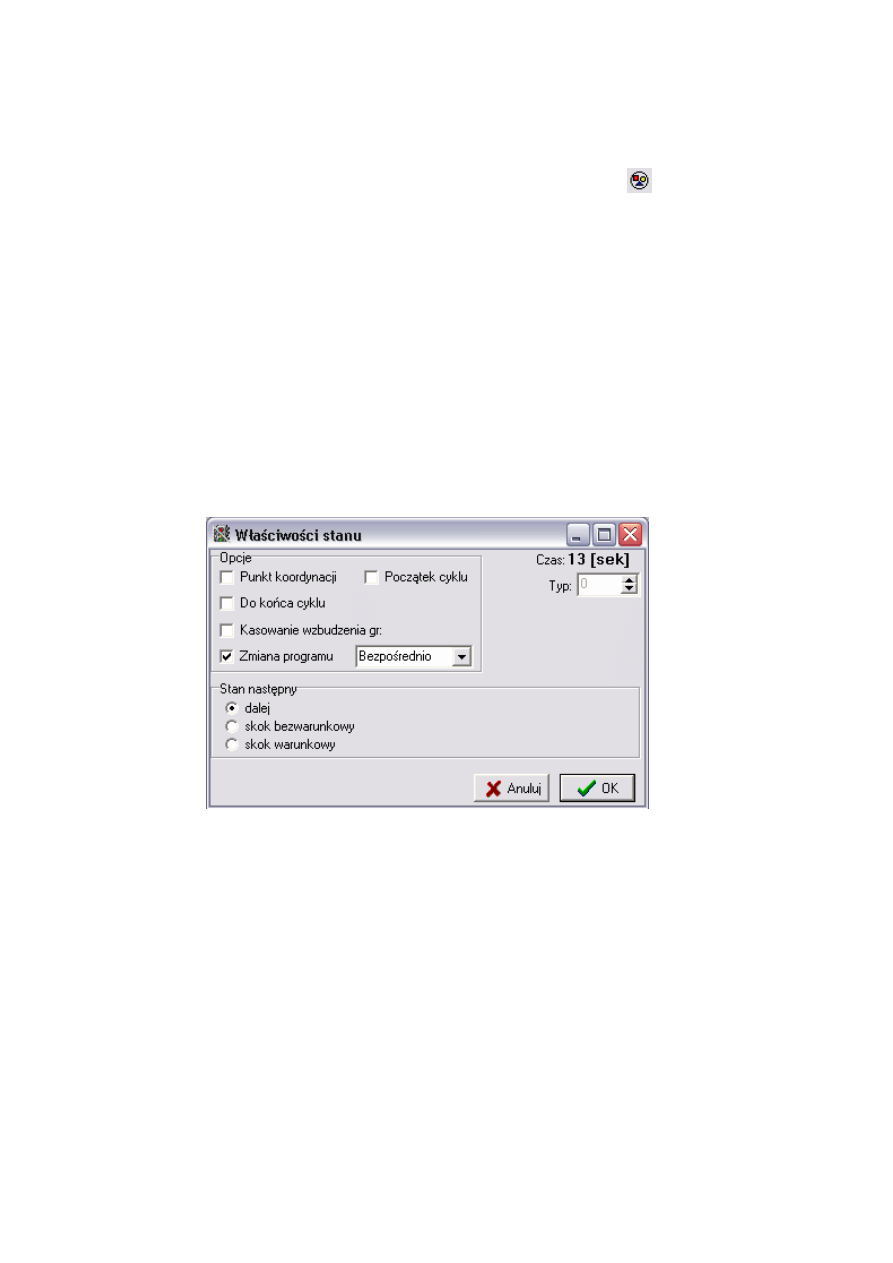
Po opracowaniu programu wejściowego należy zdefiniować, co się stanie, gdy
program dojdzie do jego końca. W tym celu należy uruchomić funkcje kreowania tzw.
stanów. Możliwe jest to poprzez wybranie przycisku z górnego menu:
. Pojawią się na
diagramie niebieskie linie w miejscach, gdzie następuje jakakolwiek zmiana
wyświetlanego sygnału. W momencie kliknięcia myszką przed jedną z tych linii pojawi się
okno „Właściwości stanu”, służące do analizy stanów i przedziałów wyznaczonych przez
te linie. Zdefiniować w nim można między innymi warunki skoków do stanów następnych,
warunkową zmianę czasu trwania poszczególnych przedziałów, określenie punktu i
sposobu zmiany programów, oraz inne opcje związane z parametrami opracowywanego
programu sygnalizacji.
Poniższa ilustracja (rys.16) przedstawia odpowiednio wypełnione okno „Właściwości
stanu” dla ostatniego stanu w programie wejściowym:
Rys. 16. Okno „Właściwości stanu” (koniec programu wejściowego)
Zaznaczony parametr oznacza, że po ukończeniu programu wejściowego nastąpi
bezpośrednio zmiana programu na nowy, który jest zapisany dalej.
Kolejnym krokiem jest utworzenie nowej zakładki prezentującej nowy, oparty na
wcześniej przygotowanym algorytmie pracy, program sygnalizacyjny. Można tego
dokonać w dwojaki sposób. Pierwszym sposobem jest rozwinięcie przycisku z górnego
menu i wybranie żądanego polecenia:
21
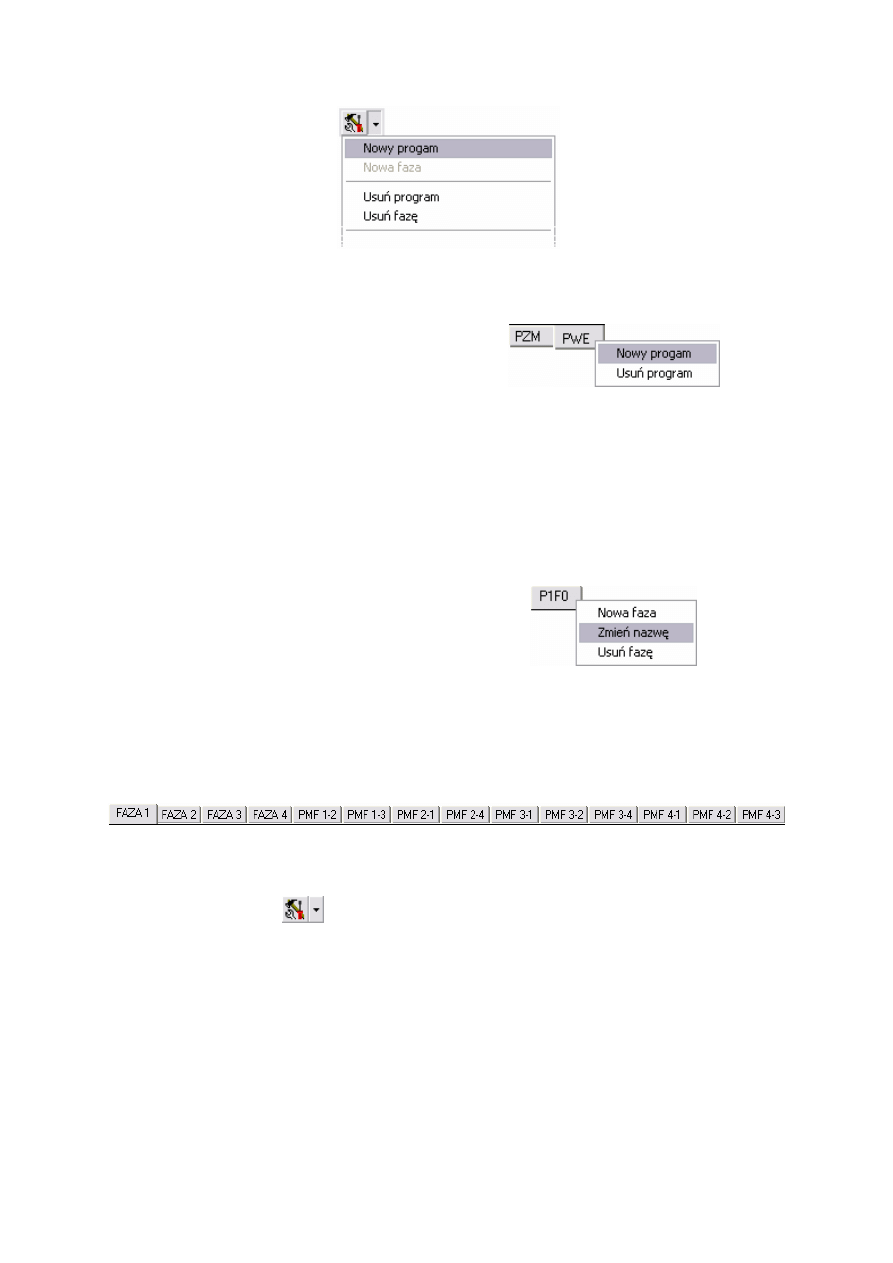
.
Drugą możliwością jest kliknięcie prawym klawiszem myszy na znaczniku zakładek
programów umieszczonym w dolnej części formularza:
.
Po wybraniu polecenia „Nowy program” utworzona zostaje nowa zakładka oznaczona
nazwą „Px” (gdzie „x” jest numerem programu fazowego). Nazwy programów są
wymuszone przez oprogramowanie i nie można ich zmieniać.
Razem z programem stworzona jest nowa faza, która przyjmuje domyślną nazwę PxF0.
Nazwę tę można zmienić klikając prawym klawiszem myszki na zakładkę nowej fazy,
znajdującej się nad siatką diagramu:
.
Następnie, w oknie nowego programu należy utworzyć tyle zakładek przedstawiających
fazy i przedziały międzyfazowe, ile zostało wcześniej zaplanowanych w projekcie na
podstawie schematu faz ruchu. W prezentowanym opracowaniu występują cztery fazy oraz
dziesięć przedziałów międzyfazowych, nazwanych następująco:
Nowe fazy i przedziały międzyfazowe tworzy się poprzez wybranie odpowiedniej opcji
w rozwijanym menu
, lub klikając prawym przyciskiem myszy na jedną ze
stworzonych wcześniej zakładek wyboru fazy i wybraniu polecenia „Nowa faza”.
Tak przygotowany edytor faz można zacząć uzupełniać w diagramy poszczególnych
przedziałów wraz z ich określonymi parametrami. Poniżej przedstawione zostały wszystkie
zamieszczone w prezentowanym projekcie zakładki faz i przedziałów międzyfazowych,
oraz zasady ich definiowania.
22
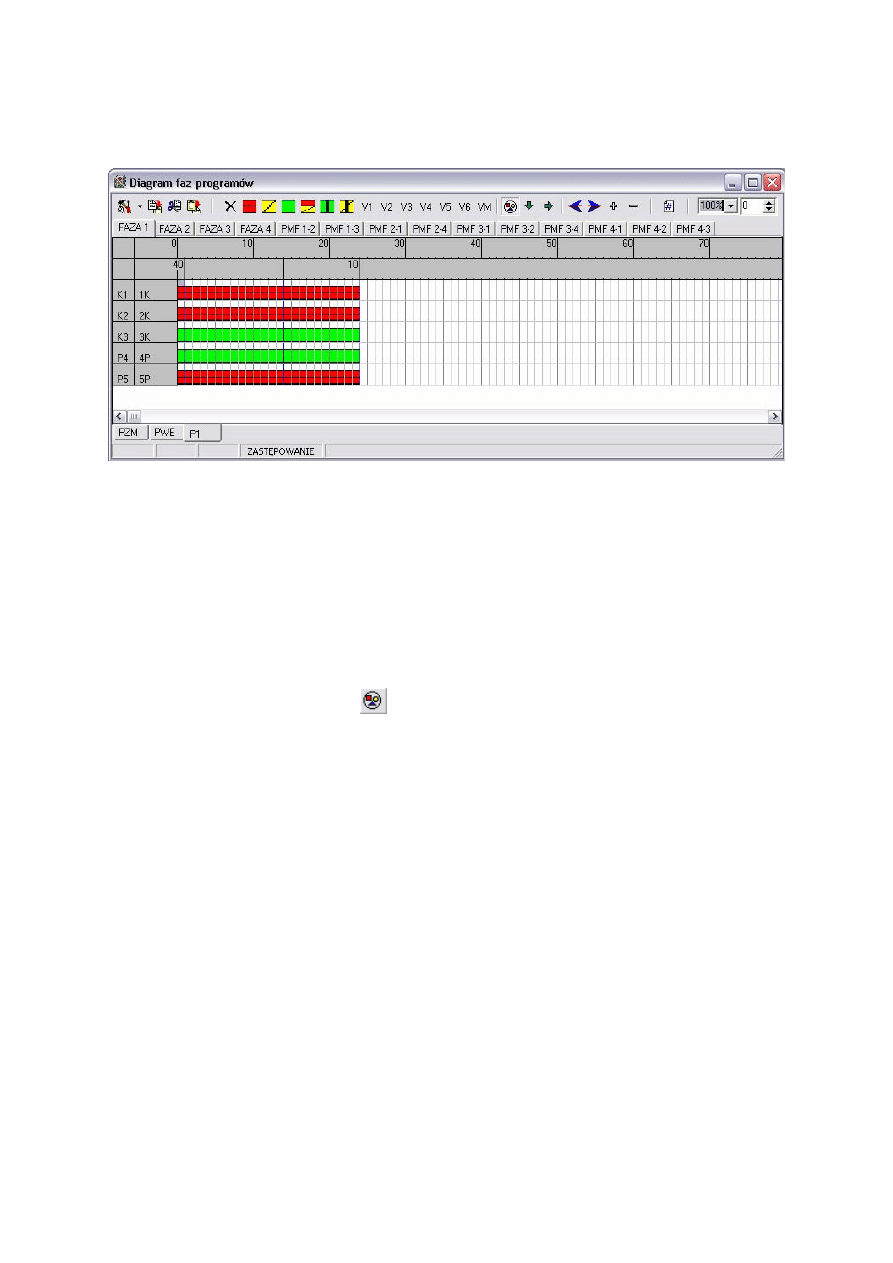
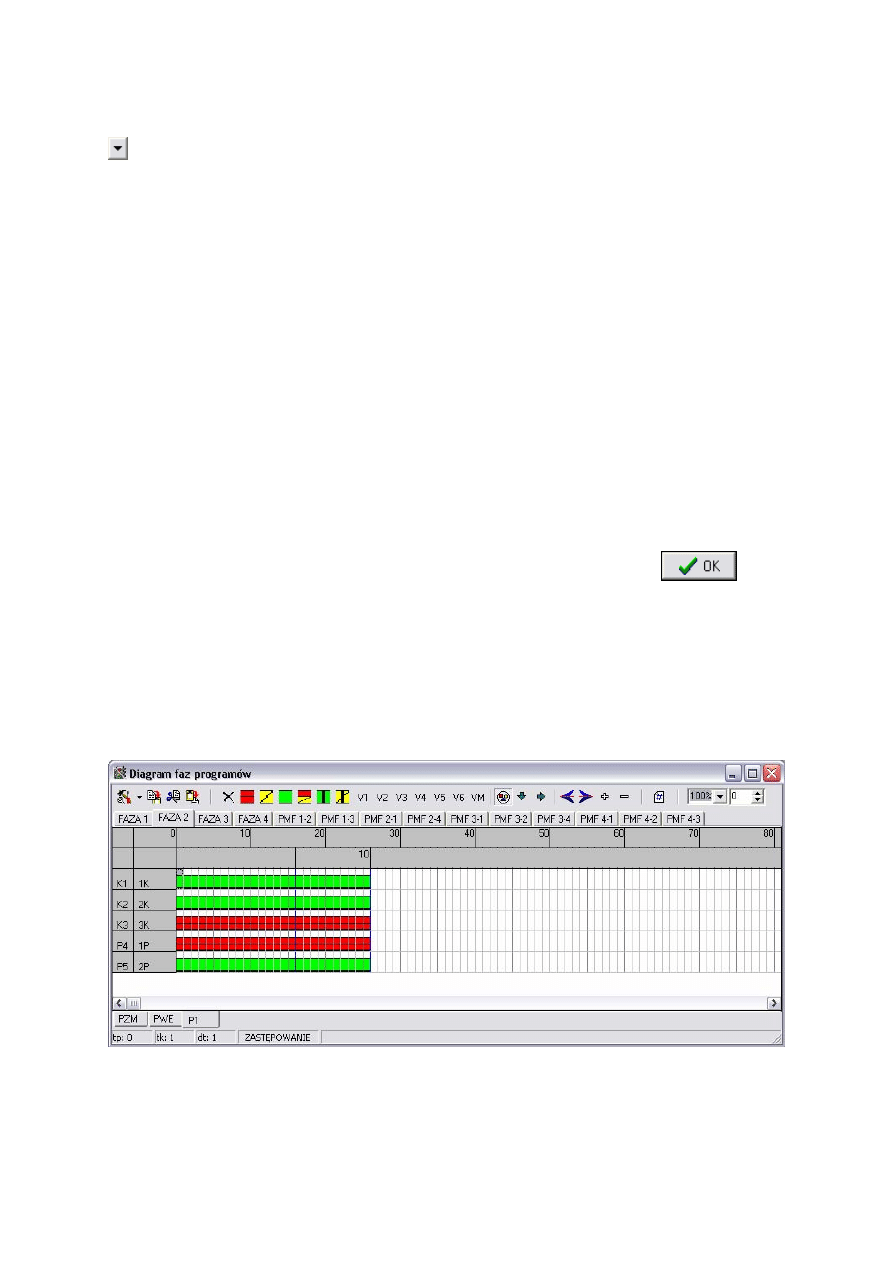
1.11.1. Definiowanie fazy 1
Rys. 17. Formularz „Diagram faz ruchu” z widocznym diagramem „Faza 1”
Pierwszym krokiem podczas definiowania faz jest narysowanie diagramu sygnałów dla
danego przedziału, pamiętając również o przestrzeganiu wcześniej przygotowanych
warunkach czasowych. Długości pasków, symbolizujących kolory sygnałów, związane są
bezpośrednio z założoną wcześniej daną T
max
n –maksymalnym czasem trwania fazy n. W
fazie 1 maksymalny czas trwania T2 wynosi 24 sekundy.
Następnie należy przyciskiem
uaktywnić funkcje analizy stanów tzn. możliwość
określania dodatkowych warunków w wybranych chwilach trwania diagramu.
Drugim wprowadzanym warunkiem czasowych w fazie 1 jest minimalny czas trwania
T1 wynoszący 14 sekund. Zaznaczenie go uzyskuje się klikając w stosownym miejscu pola
pod podziałką czasu lewym przyciskiem myszy.
Zamieszczony wcześniej w instrukcji algorytm pracy fazy 1 (rys.3) opisuje warunkowy
sposób zachowania się sterownika w przedziale czasowym T1
÷ T2 (14 24 sek.).
Określona jest możliwość skrócenia trwania fazy, oraz sposób zachowania się sterownika,
gdy zostanie osiągnięty maksymalny czas trwania T2.
÷
W Formularzu „Diagram faz ruchu” warunki te wprowadza się w oknie „Właściwości
stanu”. W celu wyświetlenia go należy kliknąć tuż przed niebieską linią, zamykającą
przedział wymagany opisania. Po otworzeniu okna należy zaznaczyć funkcje „Stan
następny” – „skok warunkowy”, umożliwiającą zdefiniowanie żądanych parametrów.
23
W nowo otrzymanych zakładkach, polecenia można podzielić na dwie kategorie:
wykonywane w czasie trwania przedziału;
wykonywane na końcu przedziału;
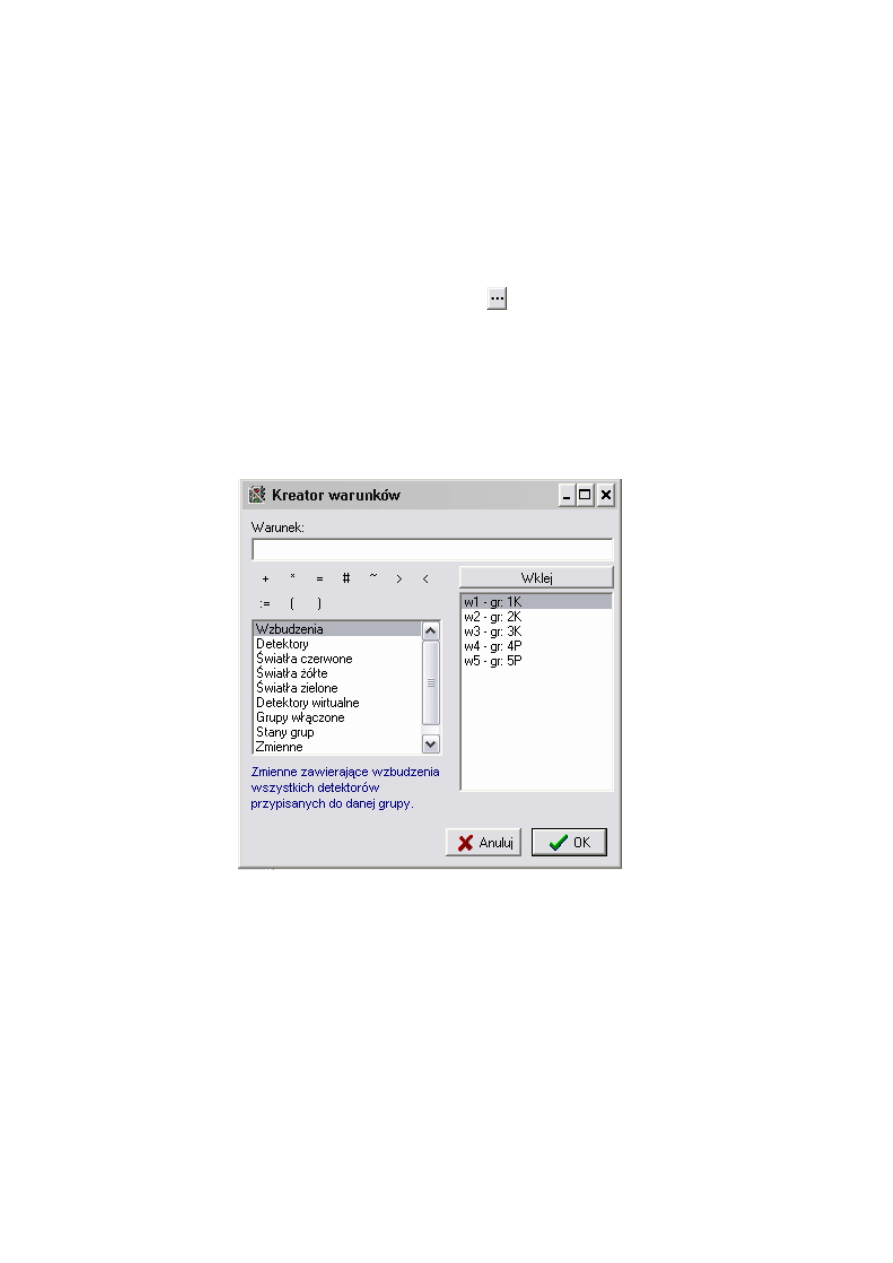
Do wprowadzania wcześniej przygotowanych funkcji logicznych warunkujących
sposób realizacji programu przydatne jest narzędzie nazwane „Kreator warunków”
(rys.18). Uruchamia się go za pomocą przycisku , znajdującego się z prawej strony
wypełnianego wiersza. Warunki logiczne tworzy się za pomocą możliwych do wyboru w
kreatorze zmiennych i operatorów. Zmienne posegregowane są według odpowiednich grup.
Opis, co zawierają odpowiednie zawartości zmiennych jest wyświetlany w kreatorze przy
każdym podświetleniu danej grupy.
Rys. 18. Okno „Kreator warunków”
W prezentowanym projekcie użyte zostały przede wszystkim zmienne z grupy
„Wzbudzenia”. Zmienne zawierają wzbudzenia wszystkich detektorów przypisanych do
danej grupy.
Zamieszczone poniżej ilustracje prezentują zakładki okna „Właściwości stanu” z
wprowadzonymi wyrażeniami logicznymi fazy 1, warunkującymi możliwe skoki do faz
następnych.
24
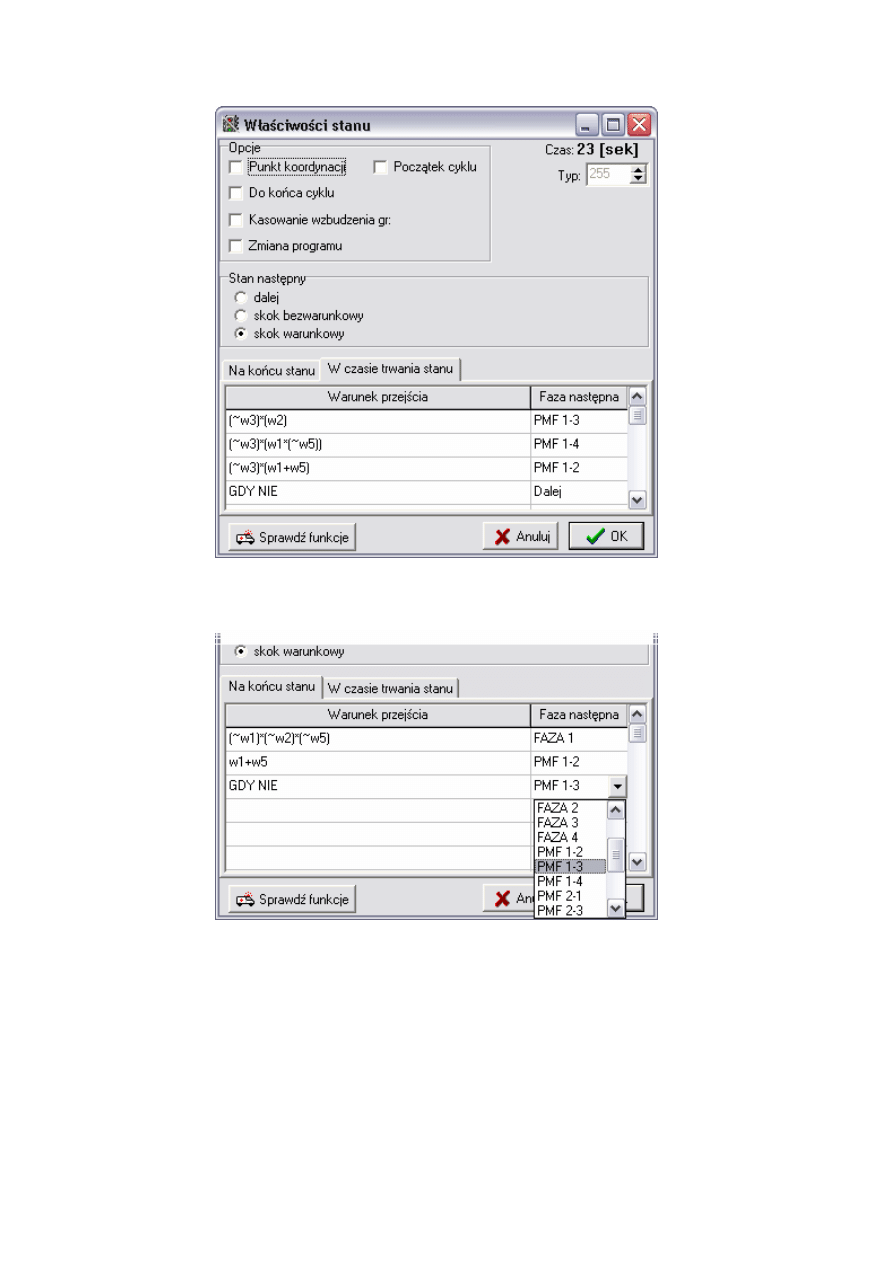
Rys. 19. Okno „Właściwości stanu” przedziału 14
÷ 24[s] fazy 1 z widoczną zakładką
„W czasie trwania stanu”
Rys. 20. Okno „Właściwości stanu” przedziału 14 ÷ 24[s] fazy 1 z widoczną zakładką
„Na końcu stanu”
Na rysunku nr19 widoczne są wpisane trzy funkcje logiczne nazwane w algorytmie
pracy fazy 1 (rys.3) jako warunki
,
i
. Wyrażenia te zapewniają akomodacje
polegającą na możliwym skracaniu czasu trwania fazy. Warunki przejścia sprawdzane są
od początku listy. Jeżeli zostanie spełniony jeden z tych warunków w danym przedziale
czasowym uaktywni on skok do fazy, której nazwa umieszczona jest z jego prawej strony.
1
L
2
L
3
L
25
Nazwę fazy następnej można wybrać z rozwijanego spisu, kryjącego się pod przyciskiem
. Gdy żaden z warunków nie zostanie spełniony, nastąpi skok do fazy, której nazwa jest
umieszczona z prawej strony warunku, „GDY NIE”. Warunek „GDY NIE” generowany
jest automatycznie, gdy wybrana jest nazwa obok pustego pola warunku. W prezentowanej
zakładce „W czasie trwania stanu” obok warunku „GDY NIE” jest informacja „dalej”.
Oznacza to, że będzie realizowany następny przedział, a w tym przypadku przejście do
sprawdzania warunków końcowych.
Zakładka „Na końcu stanu” (rys.20) definiuje skoki, których warunki wyznaczane są po
dojściu sterowania do końca opisywanego przedziału. Zgodnie z algorytmem z rysunku
nr3, w momencie spełnienia warunku
(
) (
) (
)
5
~
2
~
1
~
4
w
w
w
L
∗
∗
=
program sygnalizacji
wznowi realizacje fazy 1. W przypadku nie spełnienia tej funkcji, a potwierdzenia warunku
następnego
program przejdzie do realizacji przedziału międzyfazowego PMF 1-2.
Jeżeli natomiast będzie spełniony warunek „GDY NIE” nastąpi skok do przedziału
międzyfazowego PMF 1-3.
5
L
Wprowadzanie właściwości stanu należy zakończyć naciśnięciem przycisku
.
Przycisk ten uruchamia proces sprawdzenia poprawności warunków i uaktualnienie zmian.
W przypadku niepoprawności generowany jest komunikat ze wskazaniem miejsca błędu.
1.11.2. Definiowanie fazy 2
Rys. 21. Formularz „Diagram faz ruchu” z widocznym diagramem „Faza 2”
26
Algorytm pracy sygnalizacji podczas trwania fazy 2, pod względem ilości warunków
czasowych i ich układu, jest taki sam jak dla fazy 1. Konsekwencją tego jest analogiczne
do fazy 1 opracowywanie diagramu fazy 2.
Na widocznym diagramie zaznaczone zostały dwa stany. Mianowicie:
T3 – minimalny czas trwania fazy 2 równy 16 sekund;
T4 – maksymalny czas trwania fazy 2 równy 26 sekund;
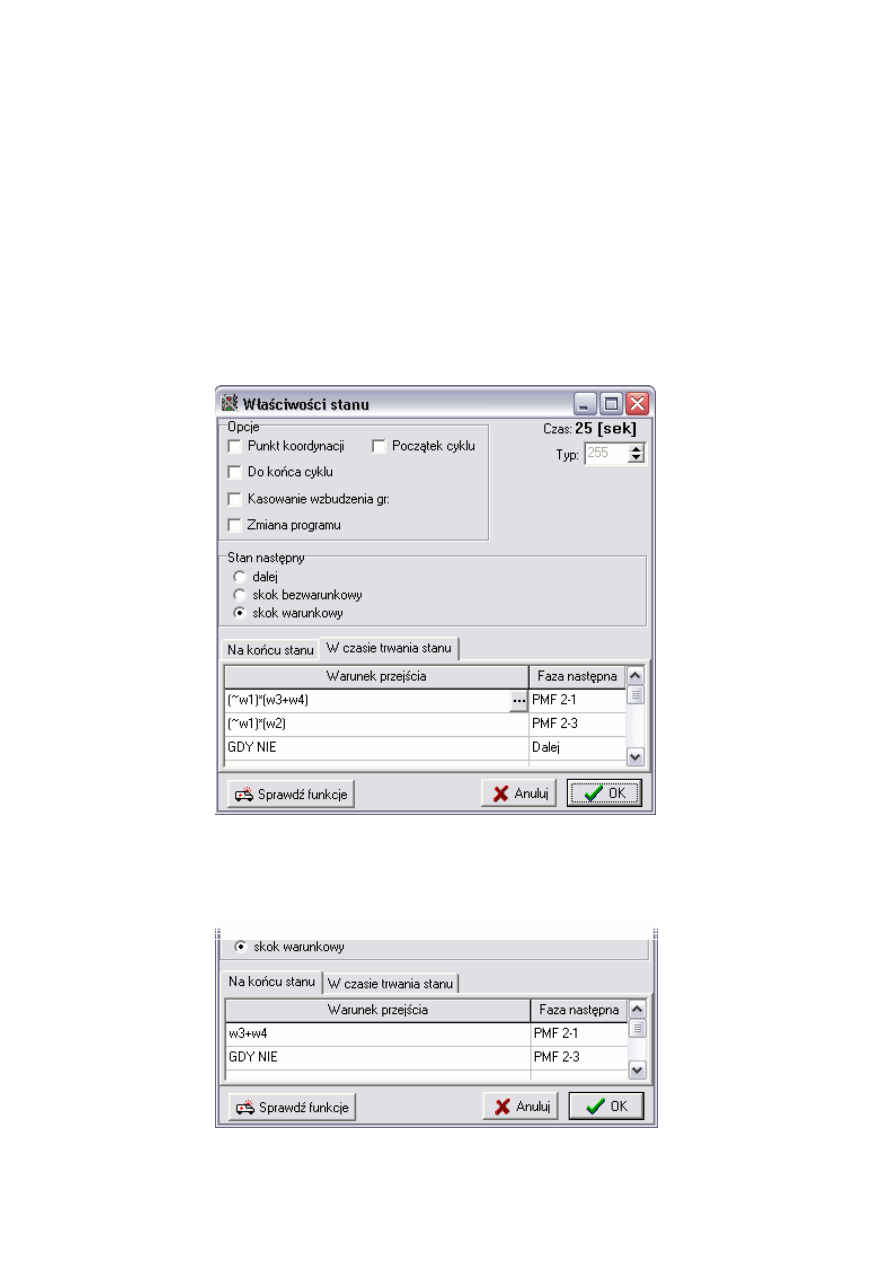
Właściwości przedziału mieszczącego się między tymi stanami, zgodne z algorytmem
pracy sygnalizacji, są przedstawione na poniższych ilustracjach:
Rys. 22. Okno „Właściwości stanu” przedziału 16
÷ 26[s] fazy 2 z widoczną zakładką
„W czasie trwania stanu”
Rys. 23. Okno „Właściwości stanu” przedziału 16
÷ 26[s] fazy 2 z widoczną zakładką
„Na końcu stanu”
27
1.11.3. Definiowanie fazy 3
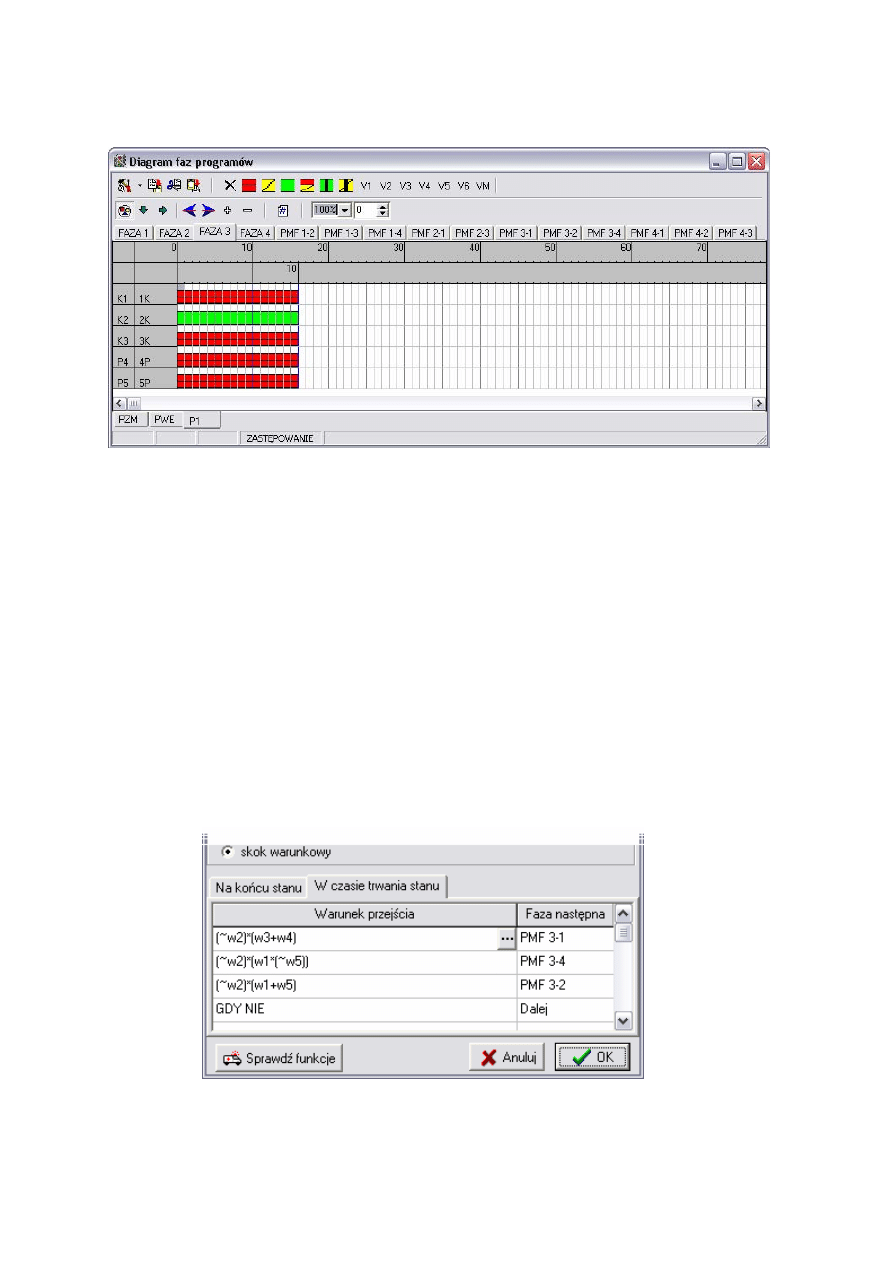
Rys. 24. Formularz „Diagram faz ruchu” z widocznym diagramem „Faza 3”
W algorytmie pracy sygnalizacji podczas trwania fazy 3 (rys.5) opracowane zostały
dwa warunki odnoszące się do zależności czasowych:
T5 – najwcześniejsze zakończenie trwania fazy 3 równe 10 sekund;
T6 – najpóźniejsze zakończenie trwania fazy 3 równe 16 sekund;
Wyznaczone w ten sposób przedziały czasowe zostały zaznaczone na diagramie w
formularzu aplikacji A40proj, widocznym powyżej (rys.24).
Poniższa ilustracja (rys.25) przedstawia wypełnioną zakładkę „W czasie trwania stanu”,
odnoszącą się do przedziału czasowego od 10 sekundy do końca trwania fazy.
Zdefiniowane zostały w niej warunki, umożliwiające skrócenie trwania fazy i skoku do
odpowiedniego przedziału międzyfazowego.
Rys. 25. Okno „Właściwości stanu” przedziału 10
÷ 16[s] fazy 3 z widoczną zakładką
„W czasie trwania stanu”
28
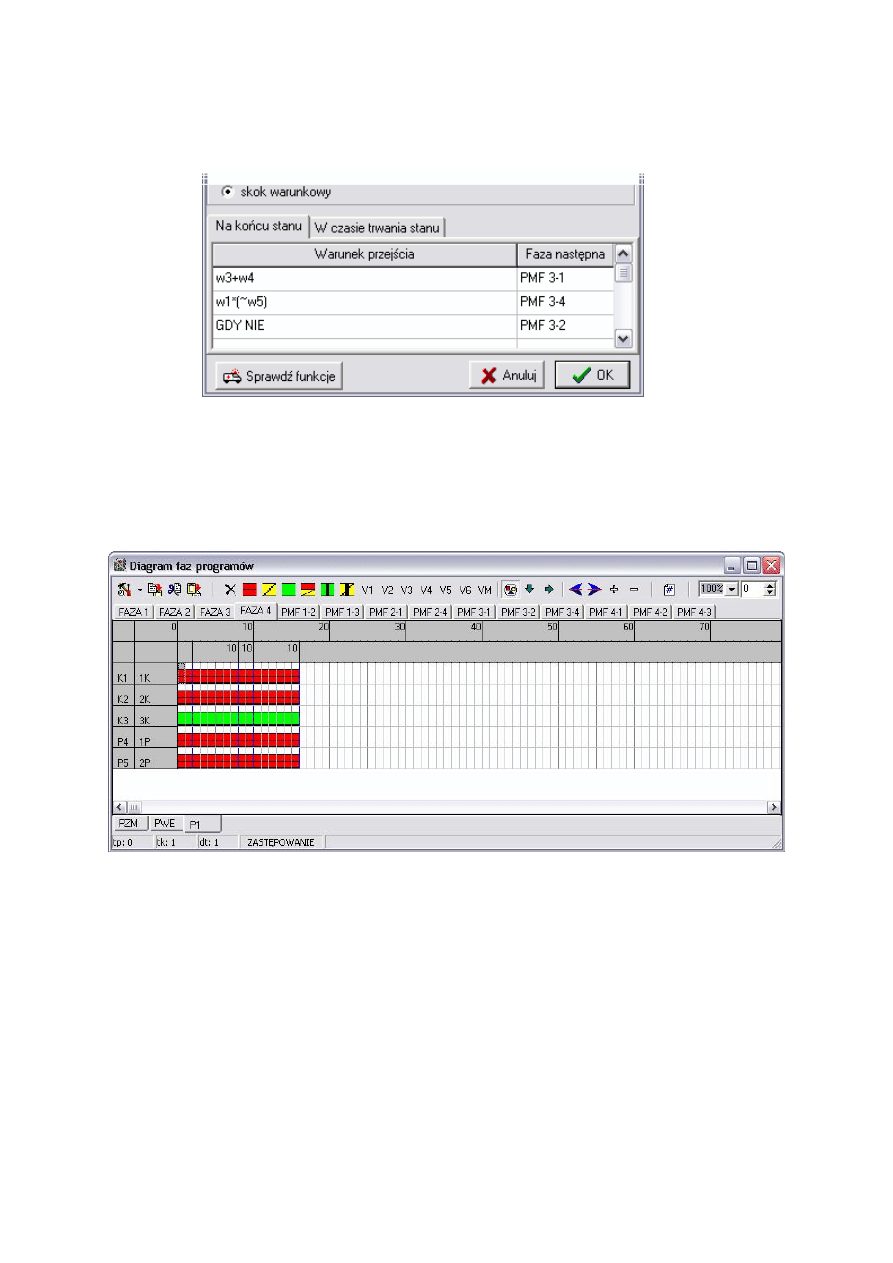
Poniżej przedstawione zostały warunki końcowe fazy 3, wyboru przejścia do wybranej
fazy poprzez odpowiedni przedział międzyfazowy.
Rys. 26. Okno „Właściwości stanu” przedziału 10
÷ 16[s] fazy 3 z widoczną zakładką
„Na końcu stanu”
1.11.4. Definiowanie fazy 4
Rys. 27. Formularz „Diagram faz ruchu” z widocznym diagramem „Faza 4”
W diagramie fazy czwartej, oprócz ostatniego stanu, wygenerowanego automatycznie
przez program, zaznaczone zostały dodatkowe trzy stany, w następujących chwilach:
T7 – najwcześniejsze zakończenie fazy 4 przed skokiem do fazy 2 równe 2
sekundy;
T8 – najwcześniejsze zakończenie fazy 4 przed skokiem do fazy 1 lub 3 równe 8
sekund;
T9 – najpóźniejsze zakończenie fazy 4 przed skokiem do fazy 2 równe 12 sekund;
T10 – maksymalny czas trwania fazy 4 równy 16 sekund;
29
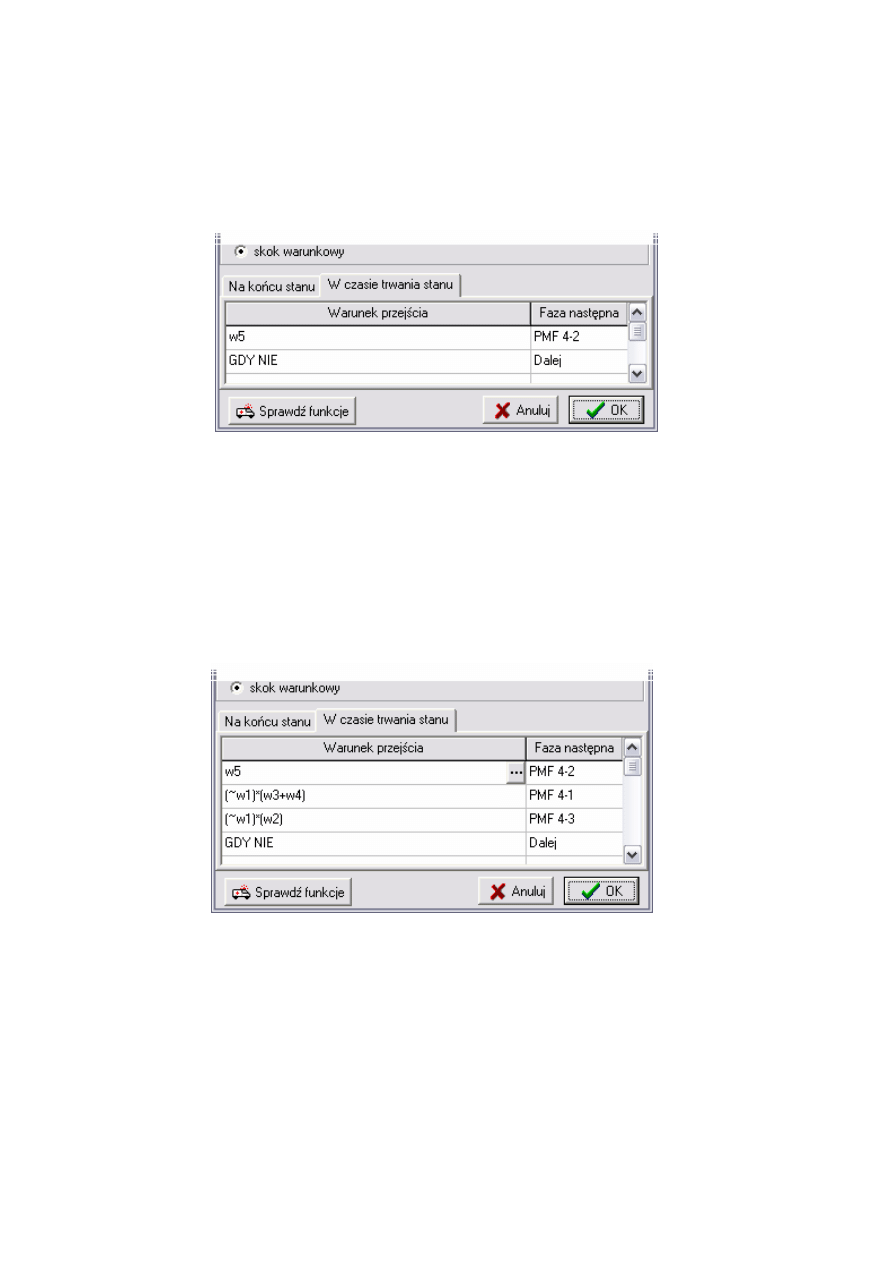
W przedziale wyznaczonym przez czasy T7
÷ T8 wpisano warunek L14 sprawdzany
przez program „W czasie trwania stanu” (rys.28). W przedziale tym zakładka „Na końcu
stanu” została wypełniona: „GDY NIE” – „dalej”.
Rys. 28. Okno „Właściwości stanu” przedziału 2
÷ 8[s] fazy 4 z widoczną zakładką
„W czasie trwania stanu”
Kolejna ilustracja (rys.29) przedstawia parametry, które zostały określone dla
przedziału trwającego od ósmej do dwunastej sekundy trwania fazy 4. Wyznaczony stan
zawiera wspólne warunki L14, L15, L16 występujące w sąsiadujących przedziałach. Układ
ten jest konsekwencją opracowanego wcześniej algorytmu pracy sygnalizacji podczas
trwania fazy 4 (rys.6).
Rys. 29. Okno „Właściwości stanu” przedziału 8
÷ 12[s] fazy 4 z widoczną zakładką
„W czasie trwania stanu”
Ostatni przedział (T9 T10) jest ograniczony z prawej strony maksymalnym czasem
trwania fazy 4, więc jego parametry zdefiniowane zostały w obu zakładkach - „W czasie
trwania stanu” i „Na końcu stanu”:
÷
30
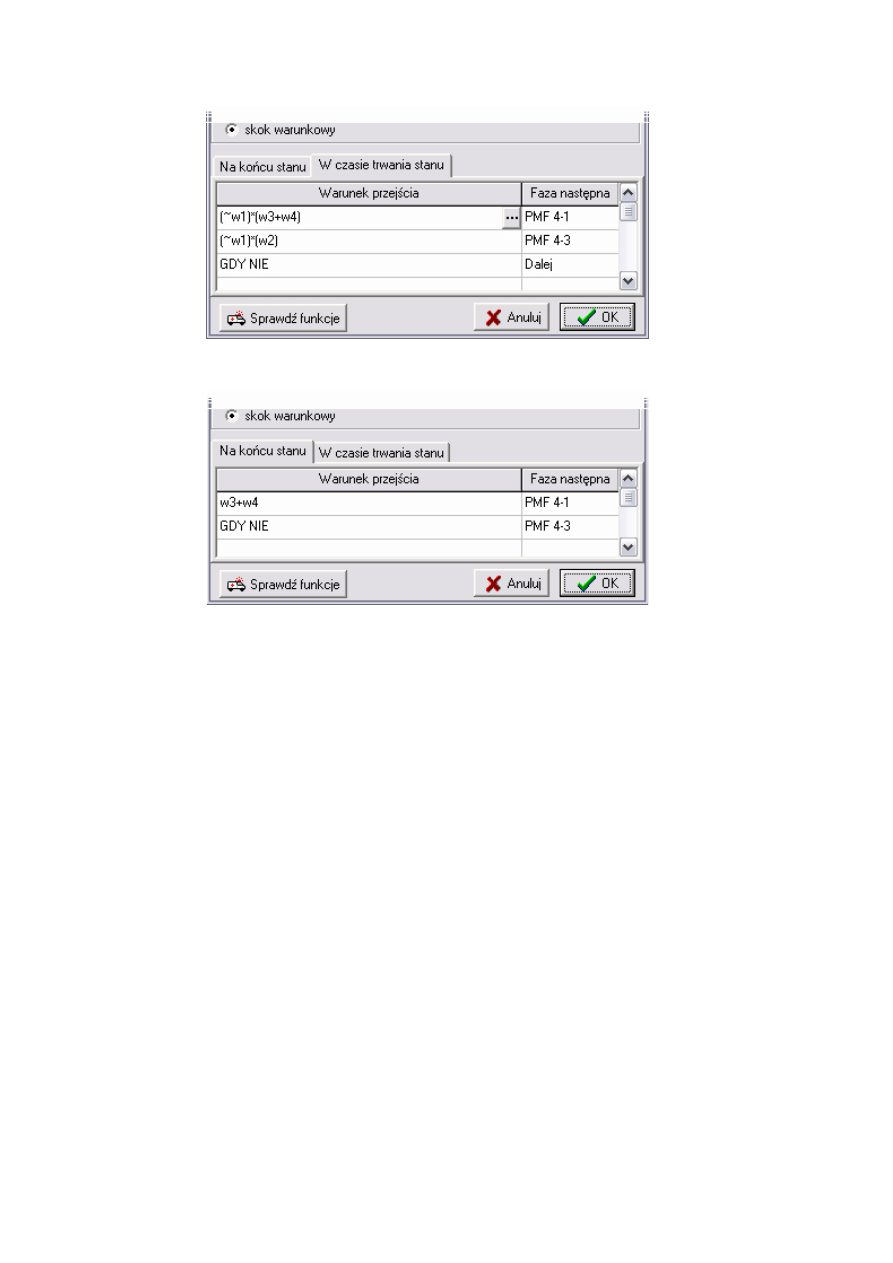
Rys. 30. Okno „Właściwości stanu” przedziału 12
÷ 16[s] fazy 4 z widoczną zakładką
„W czasie trwania stanu”
Rys. 31. Okno „Właściwości stanu” przedziału 12 ÷ 16[s] fazy 4 z widoczną zakładką
„Na końcu stanu”
1.11.5. Definiowanie przedziałów międzyfazowych
Tworzenie diagramów przedziałów międzyfazowych polega na wyznaczaniu zmian
sygnałów grup sygnałowych pomiędzy odpowiednimi fazami, bazując przede wszystkim
na tablicy czasów międzyzielonych, oraz na schemacie faz ruchu.
W programie A40proj każdy z przedziałów tworzy się od początku skali, na
oddzielnych zakładkach w formularzu „Diagram faz ruchu”. Zakładki tworzy się w ten sam
sposób jak dla faz ruchu. Dla odróżnienia należy podać odpowiednie nazwy dla
przedziałów, np. PMF n-m (gdzie „n” i „m” są punktami przejścia z fazy „n” do fazy „m”).
Dla prezentowanego projektu zaproponowane zostały następujące przedziały
międzyfazowe (rys.32):
31
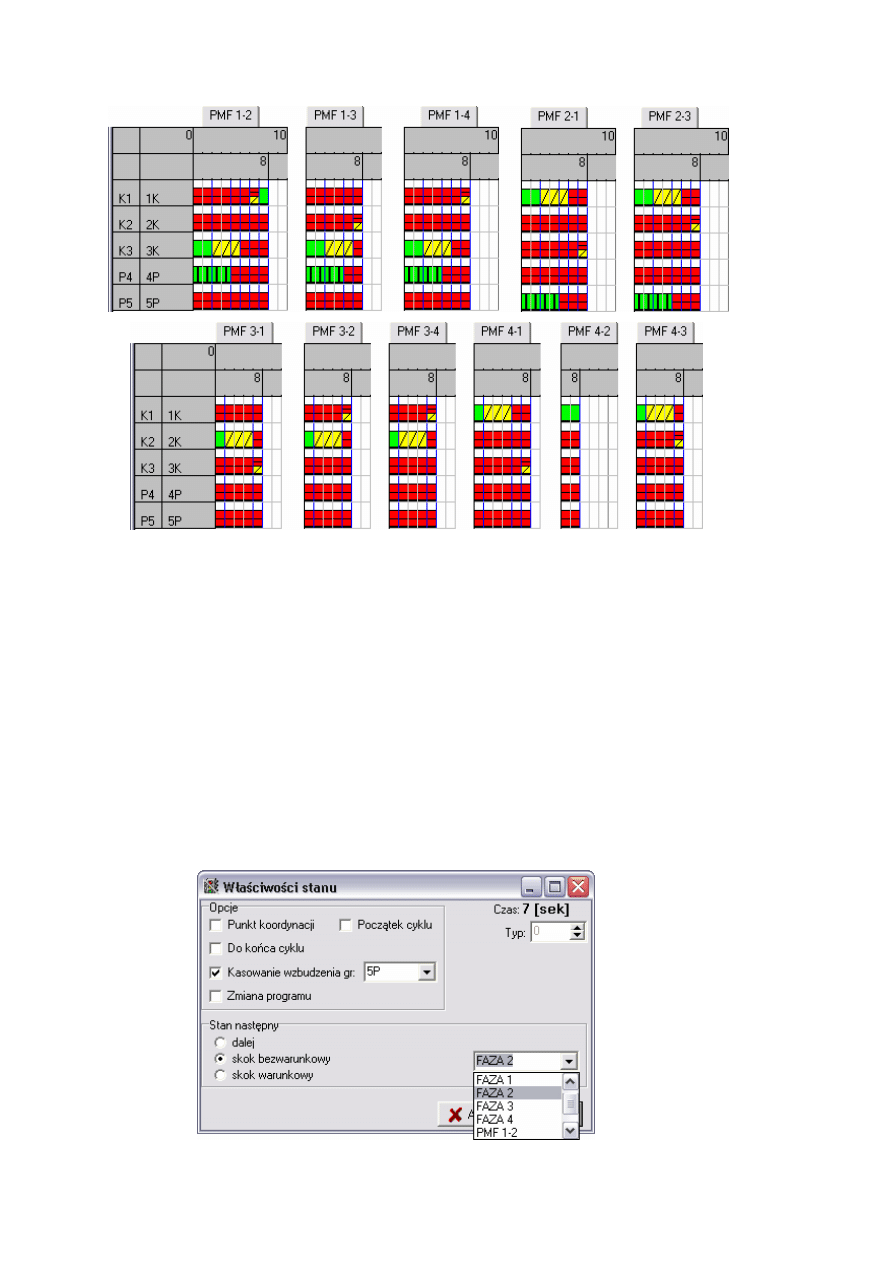
Rys. 32. Zbiorcza ilustracja okna „Diagram faz ruchu” przedstawiająca diagramy
przedziałów międzyfazowych
W końcowym stanie każdego z przedziałów należy zdefiniować, która z faz będzie
realizowana jako następna. Parametr ten wpisuje się w oknie „Właściwości stanu” jako
„Skok bezwarunkowy”. Po zaznaczeniu tej opcji pojawi się rozwijana lista wyboru żądanej
fazy. Podczas tworzenia projektu programu sterowania fazowego, posiadającego w swych
założeniach detektory dla pieszych (przyciski), należy jeszcze uwzględnić w opisywanym
oknie opcje „Kasowanie wzbudzenia gr.:”. Parametr ten definiuje się w celu skasowania z
pamięci sterownika wzbudzeń detektorów przypisanych do grupy (pieszej), która zostanie
obsłużona w fazie następnej po danym przedziale międzyfazowym.
Przykład wypełnionego okna dla przedziału międzyfazowego PMF 1-2:
Rys. 33. Okno „Właściwości stanu” dla ostatniego stanu przedziału międzyfazowego
PMF 1-2
32
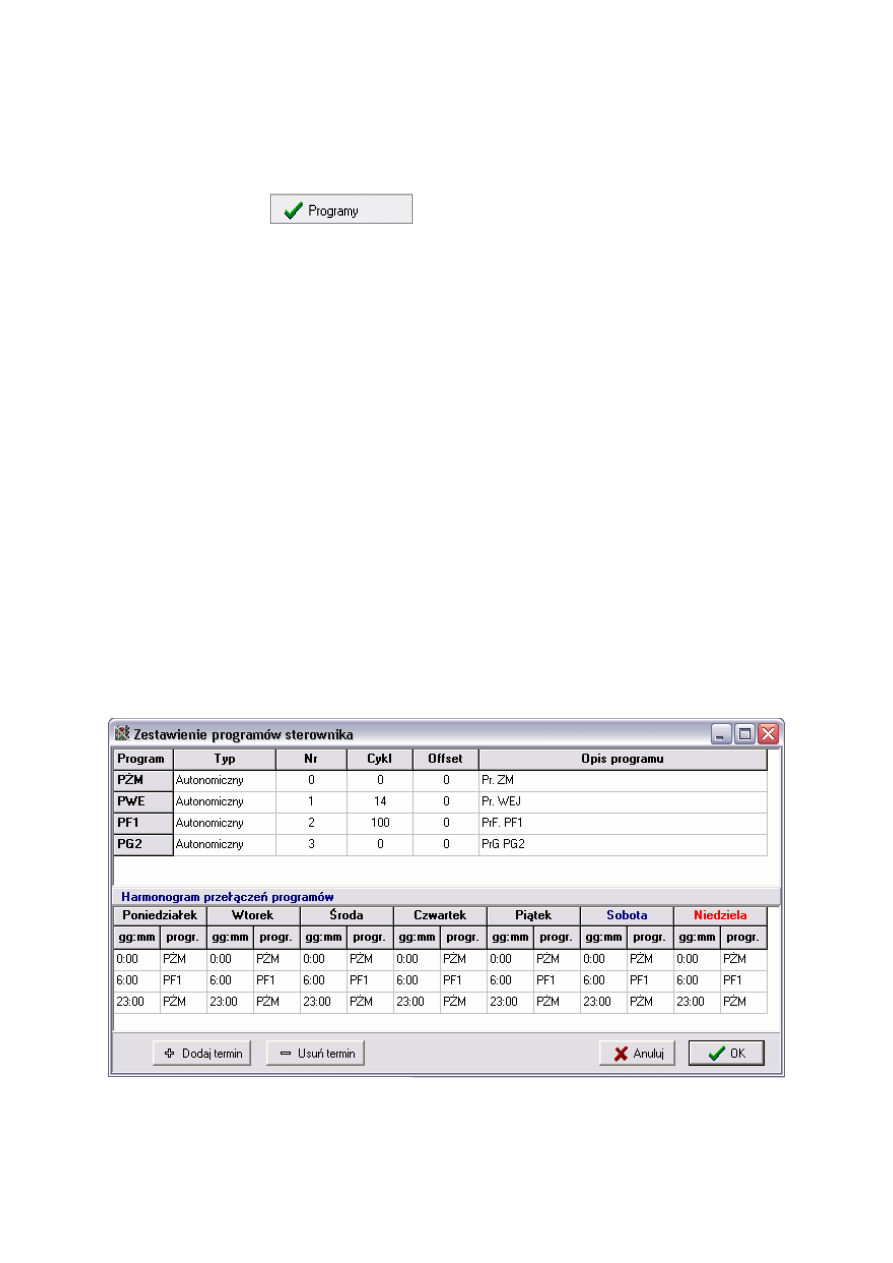
1.12. Zestawienie programów sterownika
Ostatnim formularzem, który należy wypełnić podczas programowania sterownika
ASTER 40, jest okno
. W formularzu tym należy ustalić harmonogram
załączenia wcześniej opracowanego programu, oraz inne parametry związane z
programem.
W górnej części formularza znajduje się tabela, w której podane są informacje na temat
poszczególnych programów: numer programu, typ, cykl, offset, opis programu. Cztery
pierwsze parametry wymagane są przede wszystkim w przypadku pracy sterownika w
ciągach koordynacyjnych. Ostatnia kolumna pt. „Opis programu” jest informacją, która
będzie wyświetlana na konsoli sterownika podczas realizacji danego programu.
W dolnej części formularza znajduje się tabela służąca do ustawienia czasów załączeń
przewidzianych programów. Kolumna „gg:mm” oznacza czas załączeń (godzina, minuta),
natomiast kolumna „progr.” służy do wybrania z rozwijanego spisu odpowiedniego
programu. Poszczególne wpisy przeprowadza się dla każdego dnia tygodnia niezależnie.
Na poniższej ilustracji (rys.34) przedstawiona została propozycja wypełnienia
formularza dla opracowywanego projektu. Wynika z niego, że w godzinach między 6 rano
a 23 w nocy będzie realizowany program fazowy, a w pozostałych godzinach program
„żółty migacz”.
Rys. 34. Formularz „Zestawienie programów sterownika”
33
1.13. Zapis projektu
Po wypełnieniu wszystkich wymaganych formularzy dla sterowania acyklicznego
realizującego algorytm sterowania fazowego można zapisać projekt (polecenie
Projekt/Zapisz).
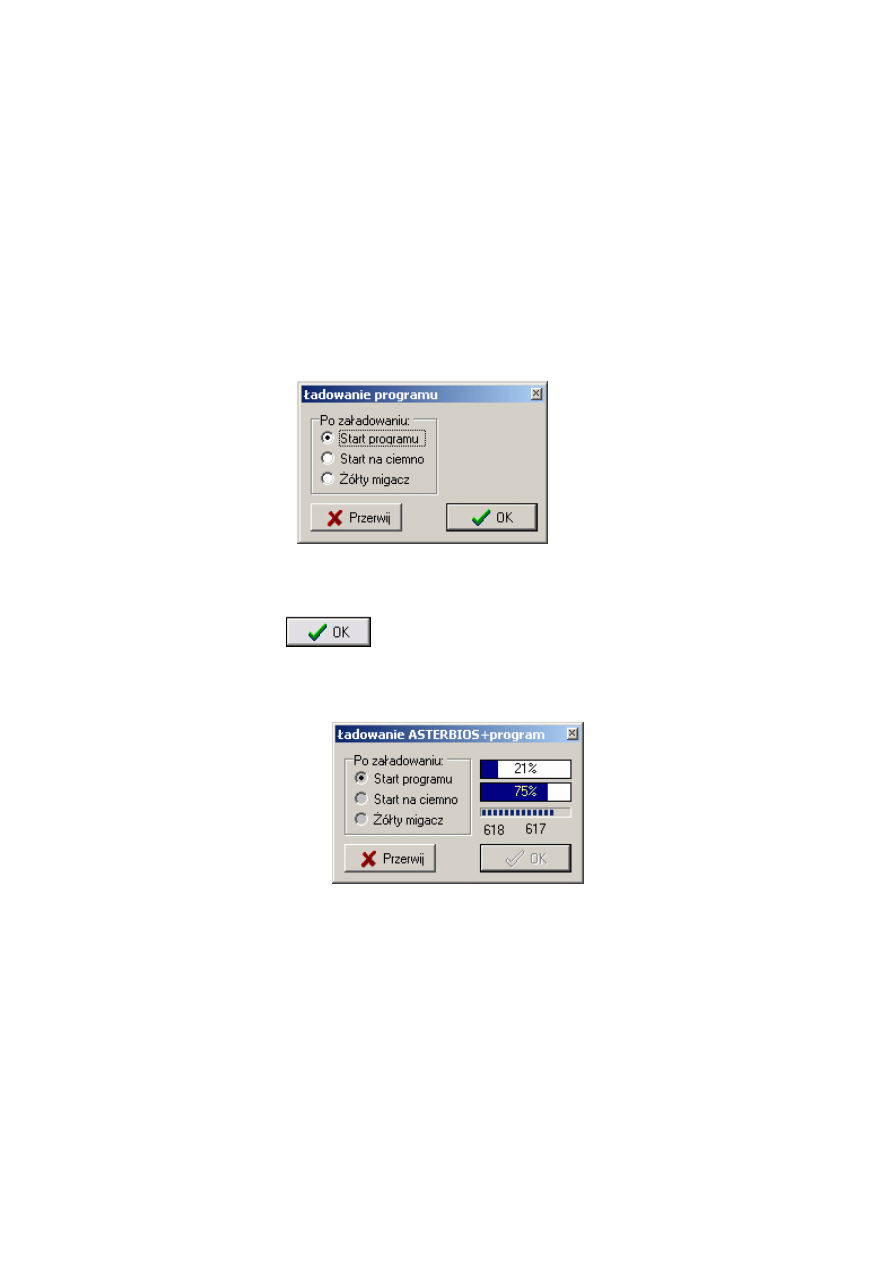
1.14. Przekazanie programu do sterownika
W celu przekazania stworzonych programów w generatorze A40proj do sterownika
należy wybrać w głównym oknie aplikacji polecenie Programowanie/Ładowanie programu.
Pojawi się wówczas okno dialogowe z możliwością wyboru opcji „Po załadowaniu”:
Wybrany parametr ustala sposób uruchomienia sterownika po zaprogramowaniu jego
pamięci.
Wybranie przycisku
uruchamia transmisję danych do sterownika. W oknie
dialogowym wyświetlana jest, w postaci wykresu, informacja zajętości pamięci programu i
całkowitej pamięci sterownika:
1.15. Program wizualizacyjny A40sym
Aplikacja A40sym jest programem przeznaczonym do testowania pracy sterownika z
załadowanymi wcześniej danymi programu sygnalizacji w generatorze A40proj. Program
pozwala na import obiektów struktury skrzyżowania zdefiniowanych w programie
A40proj. W celu wizualizacji pełnego projektu należy jeszcze przygotować wcześniej tło –
rysunek skrzyżowania. Podkład powinien być zeskanowany lub przygotowany w formie
mapy bitowej. W dalszej części instrukcji przedstawione zostały zasady tworzenia projektu
symulacji skrzyżowania z wykorzystaniem aplikacji A40sym.
34
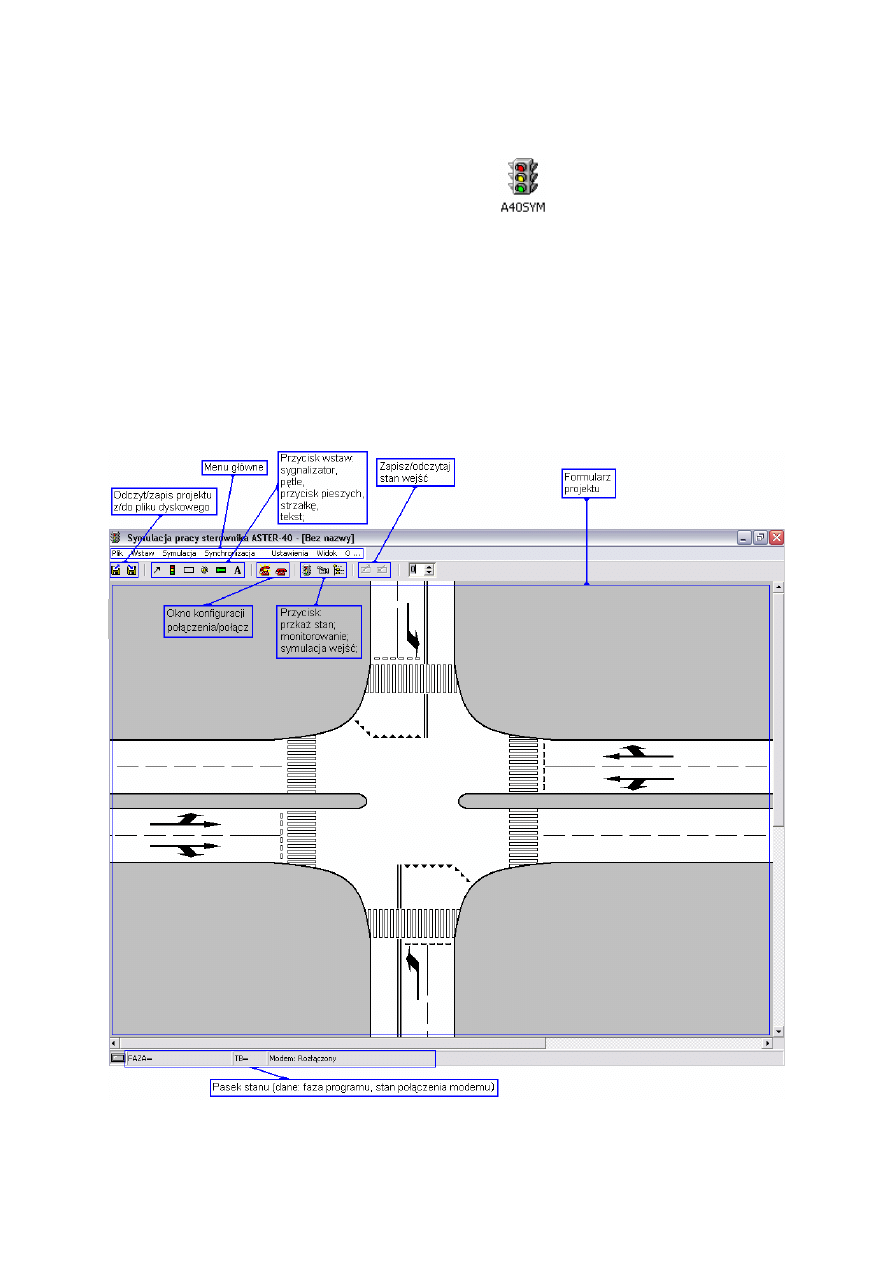
1.16. Tworzenie nowego projektu w aplikacji A40sym.exe
Pierwszą czynności jest uruchomienie aplikacji .
Następnie w otwartym oknie „Symulacja pracy sterownika ASTER-40” należy wczytać
plik zawierający układ skrzyżowania (polecenie Plik/Ładuj tło).
Rysunek umieszczony poniżej (rys.35) prezentuje znaczenie wszystkich widocznych w
głównym oknie przycisków i mechanizmów służących do wizualizacji testowanego
projektu. W środkowym, głównym polu formularza widoczna jest przygotowana wcześniej
mapa skrzyżowania.
Rys. 35. Formularz „Symulacja pracy sterownika” z wczytaną mapą skrzyżowania
35
1.17. Importowanie i modyfikacja obiektów skrzyżowania
Kolejną czynnością w wizualizacji projektu jest umieszczenie na formularzu aplikacji
A40sym symboli obiektów skrzyżowania – sygnalizatorów, detektorów pojazdów oraz
przycisków pieszych. Można tego dokonać w sposób automatyczny poprzez import
obiektów wraz z ich zdefiniowanymi nastawami z pliku A40proj (polecenie Plik/Import z
A40...). Rezultatem tej czynności jest wyświetlenie się w jednej linii wszystkich
sygnalizatorów i detektorów. Następnie należy umiejscowić wszystkie elementy zgodnie z
ich rzeczywistym rozmieszczeniem na skrzyżowaniu. Przemieszczanie odbywa się przez
ich przeciąganie za pomocą myszki (wciśnięty jej lewy klawisz) przy jednoczesnym
naciśnięciu klawisza Ctrl. W celu obrotu danego obiektu należy wskazać element prawym
przyciskiem myszy i wybrać z menu kontekstowego polecenia Właściwości. W
wyświetlonych oknach konfiguracji oprócz zmiany kąta można między innymi
zdefiniować: przynależność do grupy, numer wejścia, rodzaj opisu danego obiektu itp.
Jednak w przypadku automatycznego zaimportowania elementu skrzyżowania na
podstawie pliku utworzonego przez A40proj większość parametrów jest generowana
automatycznie.
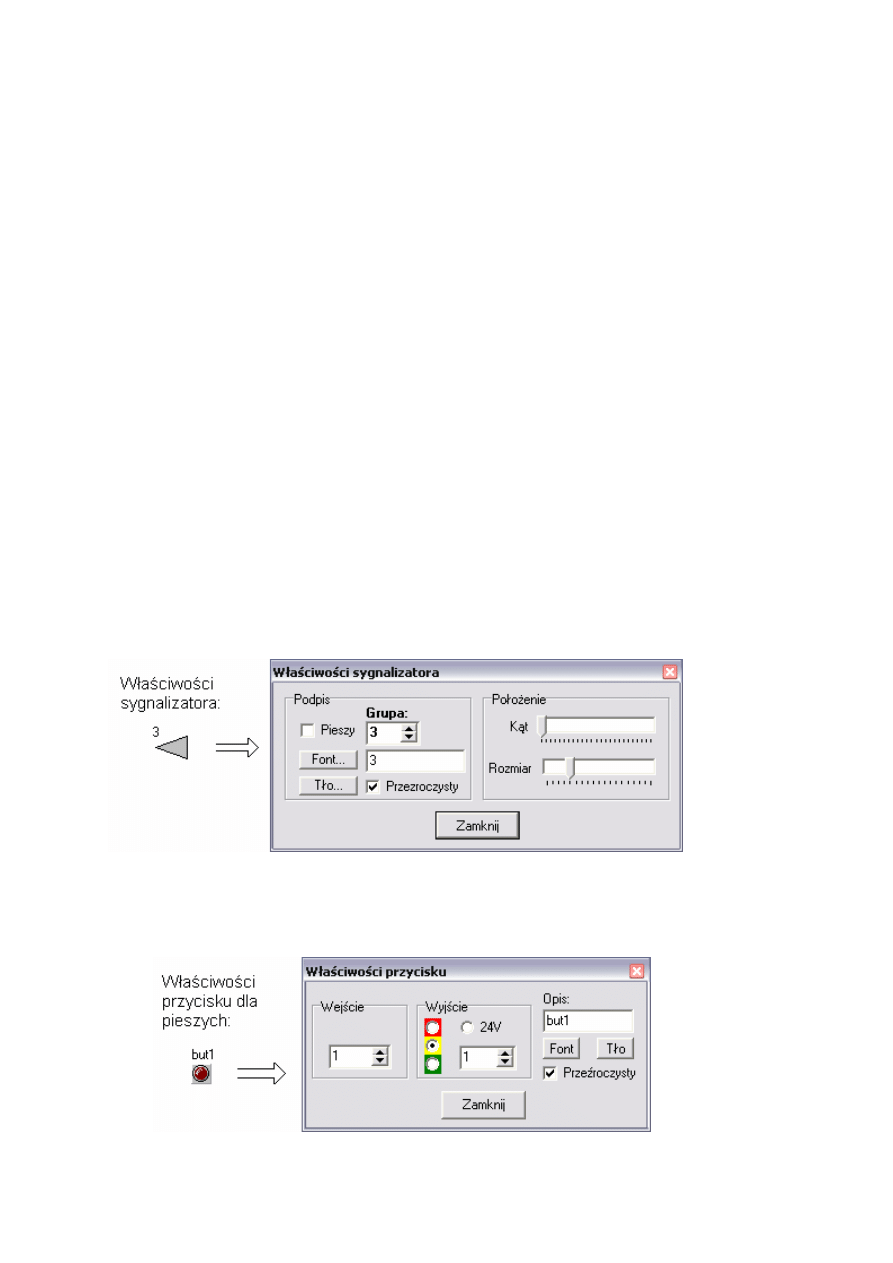
Rys. 36. Przykład wypełnienia okna „Właściwości sygnalizatora”
Rys. 37. Przykład wypełnienia okna „Właściwości przycisku”
36
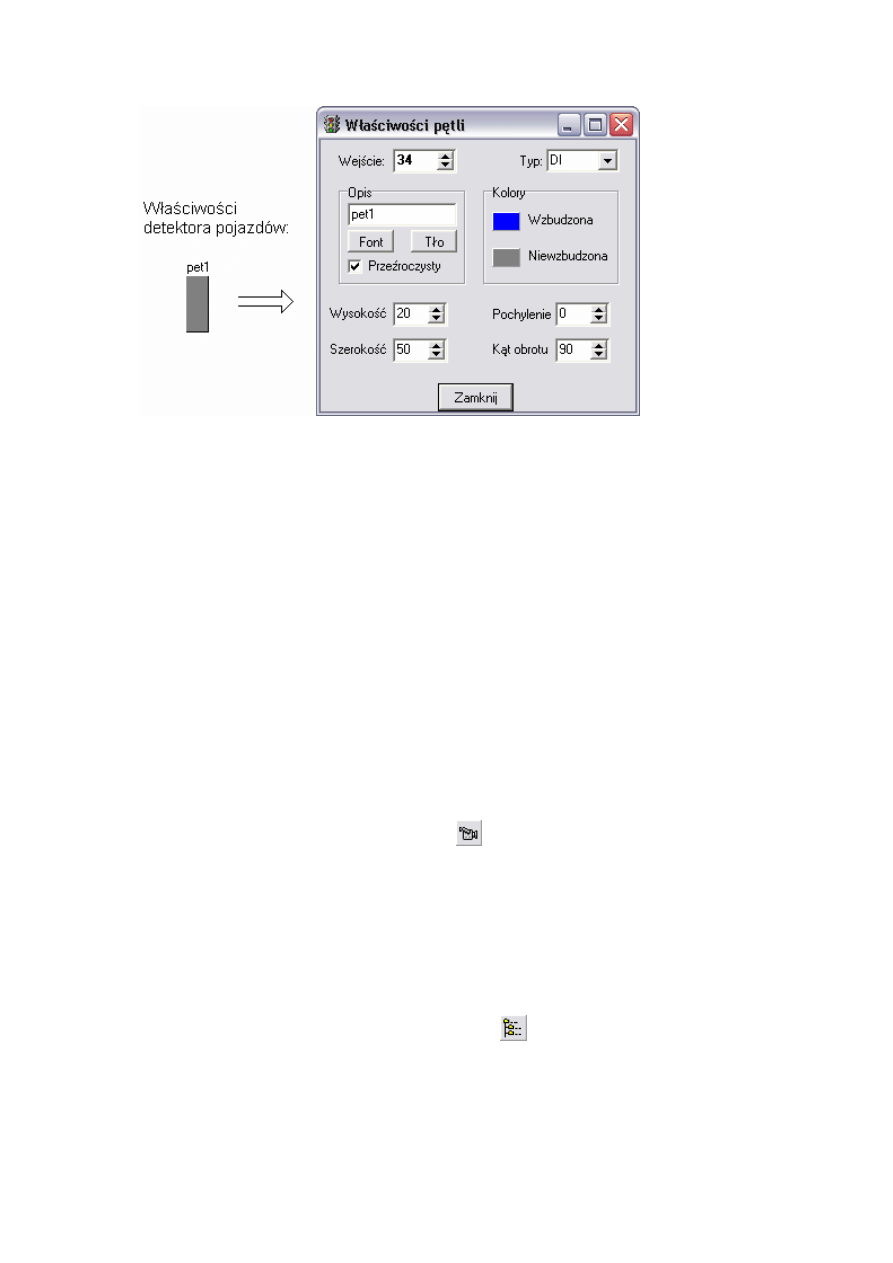
Rys. 38. Przykład wypełnienia okna „Właściwości pętli”
1.18. Testowanie pracy sterownika
Ostatnią czynnością związaną z projektowaniem programu sygnalizacji świetlnej jest
sprawdzenie poprawności pracy zaprogramowanego sterownika. Aplikacja A40sym
umożliwia przetestowanie zadanego programu ruchowego wraz z jego akomodacją.
Podczas symulacji użytkownik ma możliwość wpływu na wzbudzenia wejść sterownika,
oraz możliwy jest podgląd stanów sygnalizatorów.
W celu wizualizacji pracy sterownika zaimportowanym programem należy w głównym
formularzu A40sym wybrać polecenie „Monitorowanie stanu”. Można tego dokonać
wybierając z pasku narzędziowego ikonę
, lub polecenie w menu głównym
Symulacja/Monitorowanie stanu. Monitorowanie jest procesem obserwacji pracy
fizycznego układu sterownika wraz z podłączonymi detektorami. W warunkach
laboratoryjnych, przy braku podłączonych detektorów, sterownik będzie pracował
przyjmując jednakowe wzbudzenie dla wszystkich czujników. W celu odłączenia
fizycznych wejść sterownika i przejęcia kontroli nad nimi przez program A40sym należy
wybrać polecenie „Symulacja wejść”: przycisk
z paska narzędziowego, lub
Symulacja/Symulacja wejść.. Zmiana wzbudzeń detektorów dokonywana jest poprzez
pojedyncze kliknięcie na wybranym elemencie lewym klawiszem myszy. Stan nastaw
detektorów symbolizuje ich aktualny kolor, który został wcześniej zdefiniowany we
właściwościach danego obiektu (rys.38). Korzystając w ten sposób z programowego
37
wymuszania stanu wirtualnych wejść mamy możliwość obserwacji wyjściowego stanu
sterownika. Stan wszystkich grup sygnalizacyjnych można sprawdzać w oknie głównym
aplikacji A40sym, obserwując zmiany kolorów symboli sygnalizatorów, lub w wywołanym
oknie „Diagram stanów”. Funkcje tą uruchamia się poprzez podanie polecenia
Widok/Diagram stanów. W oknie tym informacja o realizowanym programie podana jest
za pomocą kolorowych pasków, które są uaktualniane zgodnie z ustawioną podstawą
czasu.
Poniżej zamieszczone zostały dwie przykładowe ilustracje formularza A40sym podczas
testowania projektu programu sygnalizacji świetlnej prezentowanego w pracy. Do
rysunków zamieszczone zostały krótkie komentarze z obserwacji poprawności
wykonywania prezentowanego programu ruchowego.
Przykład 1.
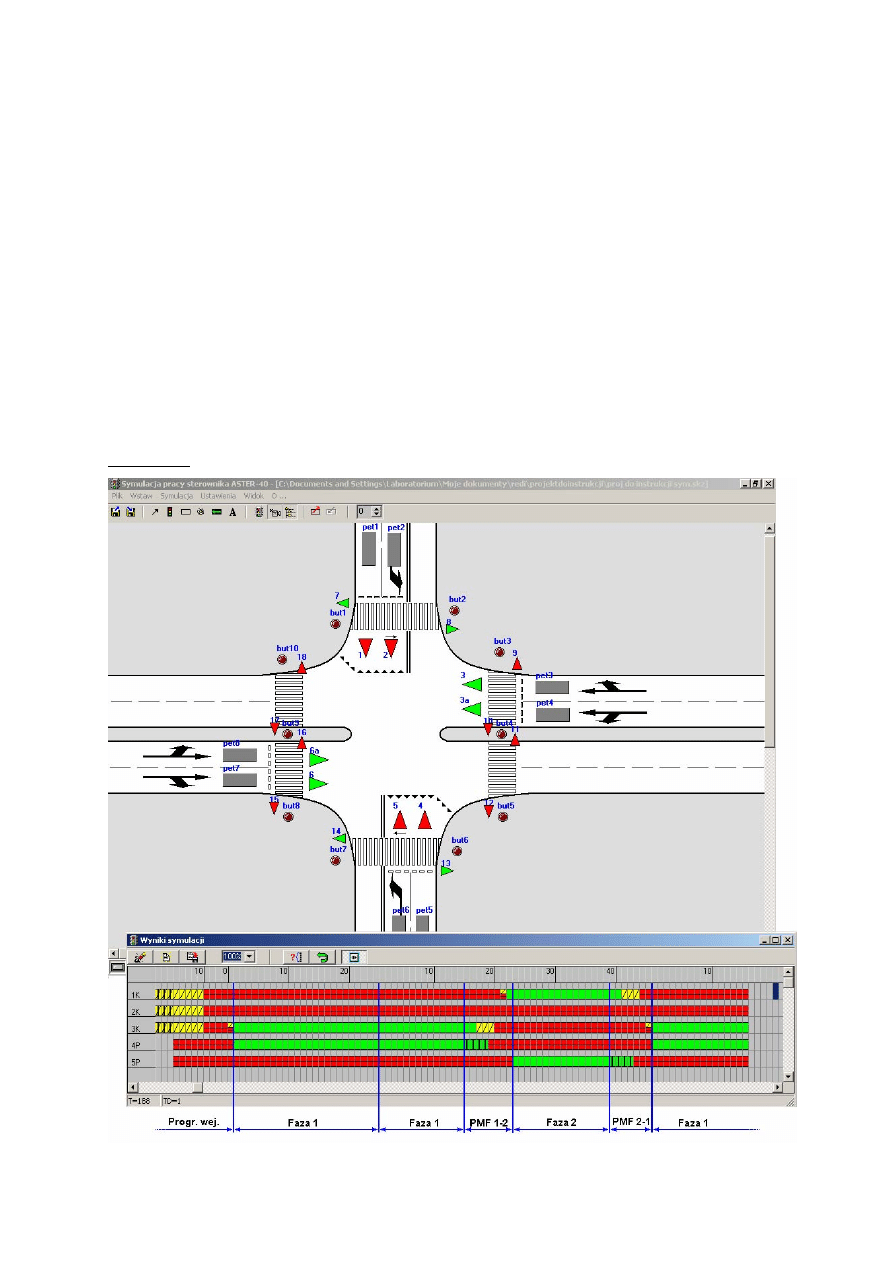
Rys. 39. Formularz A40sym – testowanie programu ruchowego
38

Umieszczone w tym rozdziale rysunki przedstawiają wyniki przeprowadzonych testów
poprawności działania programu ruchowego. W tym celu przygotowano wcześniej plan
kombinacji ingerowania w wirtualne wejścia sterownika, oraz obserwowano rezultat na
wyjściach w oknie „Wyniki symulacji”.
Na powyższej ilustracji (rys.39) przedstawiony został moment testowania programu
ruchowego uchwycony w ok.100 sekundzie pracy sterownika. Po załadowaniu i
uruchomieniu realizacji programu nie ingerowano w nastawy detektorów. W oknie
„Wyniki symulacji” widoczne jest, że po zrealizowaniu przez sterownik programu
wejściowego, następuje „zapętlenie” głównej fazy 1. Realizacja powtarzania tej fazy trwa
do momentu wystąpienia zapotrzebowania na sygnał zielony dla kierunku poprzecznego.
W ok.30 sekundzie trwania fazy 1 tj. podczas trwania powtórnej realizacji tej fazy, został
wzbudzony przycisk pieszych but3 z grupy 5P. Spełnienie warunku
(
) (
)
5
1
3
~
3
w
w
w
L
+
∗
=
azy 1 do 14 sekund i przeskok do fazy 2. Następnie zasymulowano,
wzbudzając pet3, ponowne zapotrzebowanie na główną fazę 1. Po przekroczeniu
minimalnego czasu dla fazy 2 równego 16 sekund, nastąpił przeskok do fazy 1.
umożliwiło skrócenie f
rzykład 2.
P
trwania fazy 1 wzbudzono detektor pojazdów pet2, należący do grupy 2K.
Podczas
Przy jednoczesnym braku zapotrzebowania na sygnał zielony dla realizowanej w bieżącej
fazie 1 grupy 3K (~w3), nastąpił w 14 sekundzie (Tmin fazy 1) przeskok do fazy 3. Po
rozpoczęciu realizacji fazy 3 odwzbudzono detektor pet2 i wzbudzono pet1. W ten sposób
sprawdzono działanie warunku „W czasie trwania stanu”
(
)
(
)
(
)
5
~
1
2
~
w
w
w
∗
∗
. Po
osiągnięciu minimalnego czasu trwania fazy 3 nastąpiło przejście do fazy 4. Faza ta trwała
16 sekund, co było rezultatem braku odwzbudzenia detektora pet1, tzn. nie było spełnienia
warunku umożliwiającego skrócenie czasu trwania fazy. Następnym realizowanym
przedziałem, uaktywnionym wzbudzeniem przycisku dla pieszych but2, była faza 1. W
czasie trwania wzbudzono detektor pojazdów pet1, należący do grupy 1K. Po osiągnięciu
minimalnego czasu trwania dla tej fazy zaczął być realizowany przeskok do fazy 4,
poprzez przedział międzyfazowy PMF 1-4. W 6 sekundzie trwania fazy 4 wzbudzono
przycisk dla pieszych but3. Nastawy detektorów widoczne są na zamieszczonej poniżej
ilustracji formularza (rys.38). Konsekwencją ingerencji w przycisk but3 było dołączenie
sygnału zezwalającego dla grupy sygnałowej pieszej 5P do grupy kołowej 1K.
Realizowane to jest poprzez wykonywanie przez program fazy 2.
39
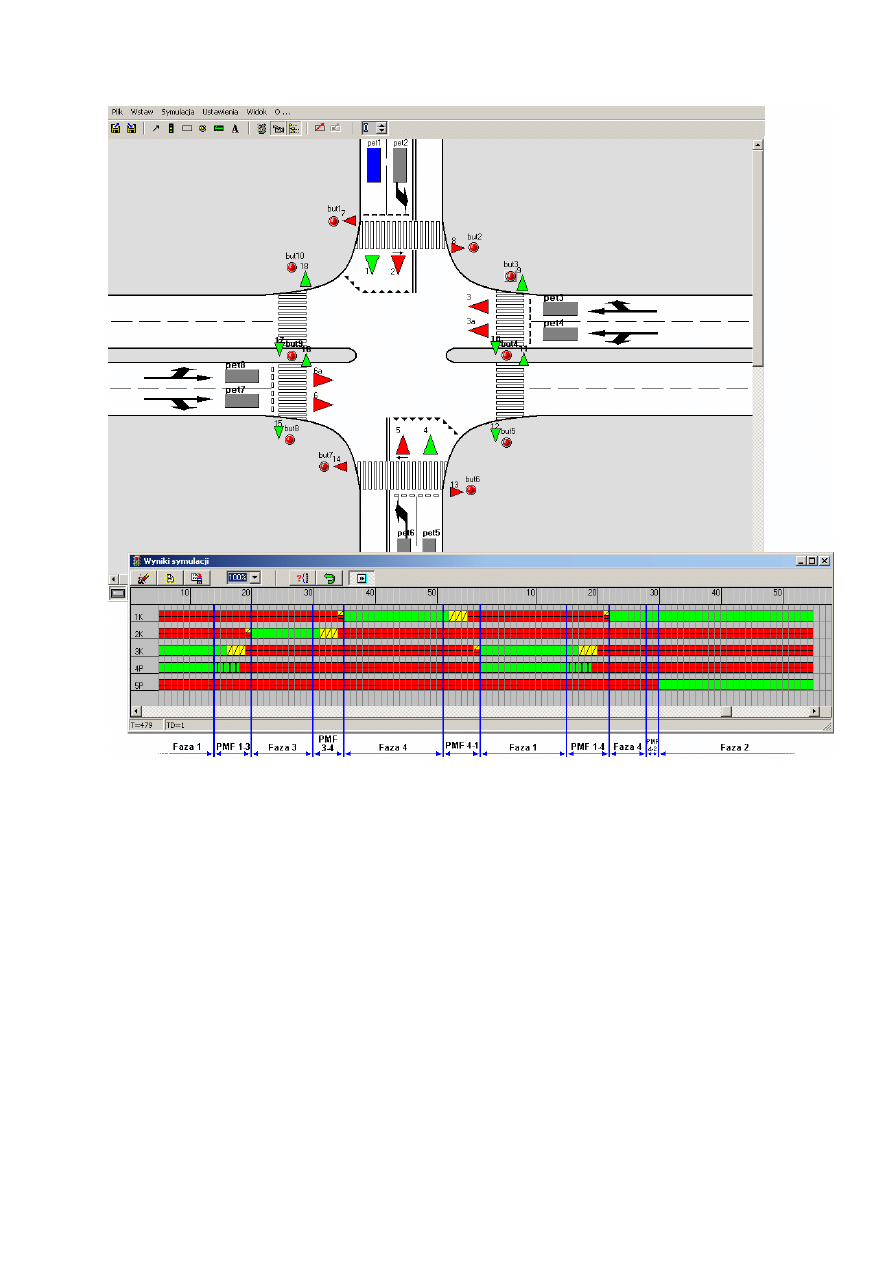
Rys. 40. Formularz A40sym – testowanie programu ruchowego
Wyżej przedstawione przykłady symulacji są prostymi metodami testowania
zaprogramowanego sterownika ASTER-40. Ingerując w nastawy detektorów i obserwując
stan grup w oknie głównym formularza, lub diagram stanów w oknie „Wyniki symulacji”
można w łatwy sposób sprawdzić zgodność pracy sterownika z wcześniej
zaprojektowanym algorytmem pracy sygnalizacji.
40

Bibliografia
[1] W.Araminowicz, M.Marszał: „Dokumentacja techniczno-ruchowa akomodacyjnego
sterownika sygnalizacji ulicznej – Sprzęt”. Kraków 2001.
[2] W.Araminowicz, M.Marszał: „Dokumentacja techniczno-ruchowa akomodacyjnego
sterownika sygnalizacji ulicznej – Obsługa operatorska”. Kraków 2001.
[3] W.Araminowicz: „A40proj – Podręcznik użytkownika”. Kraków 2002.
[4] W.Araminowicz: „A40sym – Podręcznik użytkownika”. Kraków 2002.
[5] Dane i informacje z broszur i kart informacyjnych udostępnionych od producenta
sterownika ASTER, oraz na stronie internetowej www.a-ster.com.pl.
[6] S.Datka, W.Suchoczewski, W.Tracz: „Inżynieria ruchu”. Warszawa, WKŁ 1999.
[7] M.Leśko, J.Guzik: „Sterowanie ruchem drogowym – Sterowniki i systemy
sterowania i nadzoru ruchu”. Gliwice 2000.
[8] M.Leśko, J.Guzik: „Sterowanie ruchem drogowym – Sygnalizacja świetlna i
detektory ruchu pojazdów”. Gliwice 2000.
[9] „Sterownik sygnalizacji ulicznej ASTER40/6 – Instrukcja wprowadzania i
testowania (wizualizacji) cyklicznych programów sygnalizacji drogowej”. PW.
[10] Dokumentacje projektów programów sygnalizacji świetlnych na skrzyżowaniach w
Warszawie udostępnione przez przedsiębiorstwo „MPRE” Spółka Pracownicza Sp.
z o.o.
41
Document Outline
Wyszukiwarka
Podobne podstrony:
Instrukcja Sprawdzarka v01 20100617
1 INSTRUKCJA PRZYGOTOWANIA PRE Nieznany (2)
5 VisSim Instrukcja przygotowawcza v 01a (2)
Instrukcja Sprawdzarka v01 20100617
Zwykłe, higieniczne i chirurgiczne mycie rąk Przygotowanie do instrumentowania Przygotowanie stolika
Instrukcja Kompletacja v01 20100524
Instrukcja BHP dla ¶lusarzy, BHP i PPOŻ przygotowanie do szkoleń, Instrukcje BHP
roboty transportowe, BHP i PPOŻ przygotowanie do szkoleń, Instrukcje BHP
obsługa piły tarczowej do cięcia mięsa i kości, BHP i PPOŻ przygotowanie do szkoleń, Instrukcje BHP
Instrukcja BHPprzy kapowaniu pakietów, BHP i PPOŻ przygotowanie do szkoleń, Instrukcje BHP
Instrukcja odkurzacz warsztatowy, BHP i PPOŻ przygotowanie do szkoleń, Instrukcje BHP
PROGRAM INSTRUKTAŻU STANOWISKOWEGO biuro, BHP i PPOŻ przygotowanie do szkoleń, Szkolenia- BHP
INSTRUKCJA BHP PRZY OBSŁUDZE SEKRETARIATU, BHP i PPOŻ przygotowanie do szkoleń, Instrukcje BHP
PRZYGOTOWANIE PRBEK DO ANALIZY2, WIMiC, instrumentalne
więcej podobnych podstron