Wykład 6
Wykład 6
Układ
Układ
regulacji
regulacji
, jego
, jego
zadanie
zadanie
i struktura
i struktura
Podstawy Automatyki
Podstawy Automatyki
Janusz KOWAL
Janusz KOWAL
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza
Hutnicza
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
2
Sterowanie automatyczne
– użycie urządzeń zastępują-
cych człowieka w czynnościach nadzoru, wpływających na
przebieg procesu technologicznego w taki sposób, by
osiągnięto z góry zamierzony cel
Regulacja automatyczna
– szczególny przypadek sterowa-
nia automatycznego, polegający na utrzymaniu, bez
ingerencji człowieka, pewnego fizycznego parametru na z
góry określonym poziomie lub wartości
Wprowadzenie
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
3
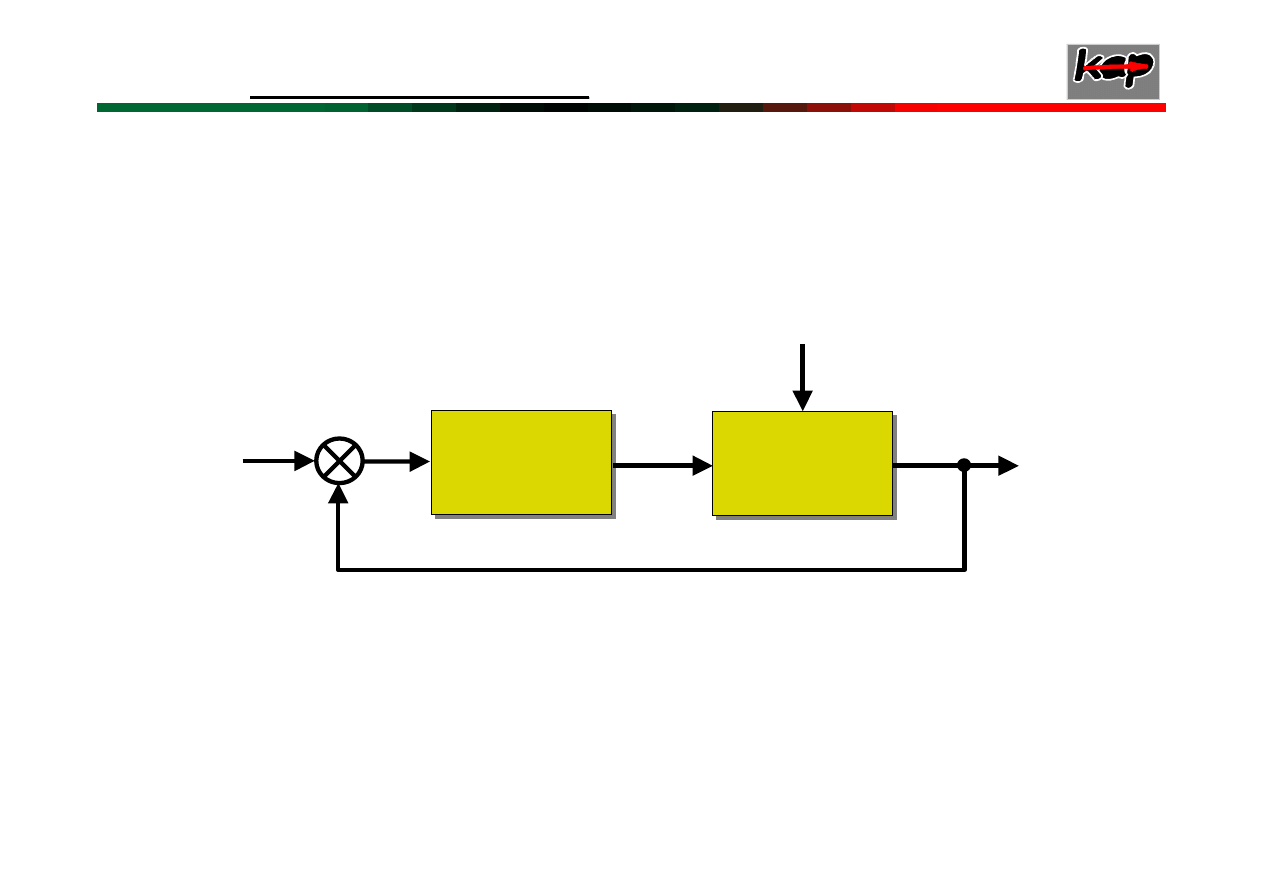
Schemat blokowy układu automatycznej regulacji
regulator
G
r
(s)
regulator
G
r
(s)
obiekt
G
o
(s)
obiekt
G
o
(s)
–
w(t)
e(t)
u(t)
y(t)
z (t)
0
))
(
)
(
(
lim
)
(
lim
→
−
=
∞
→
∞
→
t
y
t
w
t
e
t
t
9
zadanie układu regulacji – minimalizacja sygnału
uchybu regulacji e(t), tak aby:
9
układy automatycznej regulacji są układami zamkniętymi,
wykorzystującymi
ujemne sprzężenie zwrotne
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
4
9
regulacja stałowartościowa - polega na utrzymywaniu
stałej wartości wielkości regulowanej (wartość zadana:
w = const)
Rodzaje regulacji:
9
regulacja nadążna - tu wartość zadana zmienia się
w sposób niezdeterminowany (w = ?)
9
regulacja programowa - wartość wielkości regulowanej
ma zmieniać się w czasie w ustalony z góry sposób
(wartość zadana jest zdeterminowana)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
5
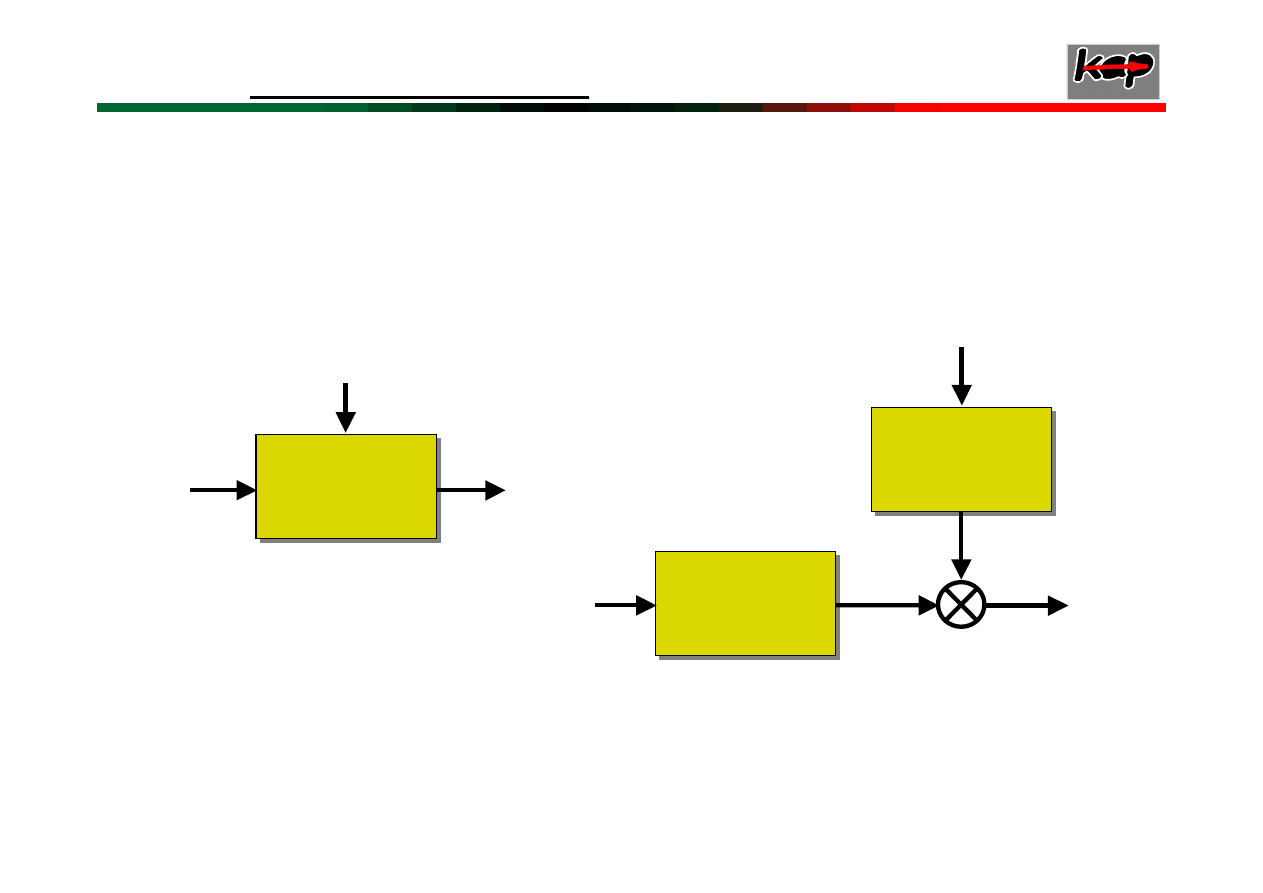
Obiekty regulacji
Schematy blokowe obiektów regulacji:
gdzie: u(t) – wielkość sterująca,
z(t) – wielkość zakłócająca,
y(t) – wielkość wyjściowa
G(s)
G(s)
y(t)
z (t)
u(t)
u(t)
y(t)
z (t)
G
1
(s)
G
1
(s)
G
2
(s)
G
2
(s)
+
+
a) jednowymiarowego
b) wielowymiarowego
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
6
Proces identyfikacji obiektu umożliwia stworzenie modelu
matematycznego obiektu regulacji, na podstawie obserwacji
przebiegów wyjściowych (będących np. odpowiedzią na
wymuszenie skokowe).
9
jako proces fizyczny (technologiczny) o określonej
dynamice, np. proces zmiany temperatury w piecu,
ciśnienia w zbiorniku, poziomu cieczy w zbiorniku
9
jako zestaw aparatury technologicznej, w której zachodzi
proces regulowany, np. piec hartowniczy, zbiornik
ciśnieniowy, zbiornik cieczy, robot
Pojęcie
obiektu regulacji
:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
7
Ze względu na końcową wartość odpowiedzi skokowej
rozróżnia się dwie grupy obiektów:
9
statyczne
(z samowyrównaniem), których wartość
odpowiedzi skokowej dąży do wartości skończonej (nie
posiadają działania całkującego)
9
astatyczne
(bez samowyrównania), których wartość
odpowiedzi skokowej dąży do nieskończoności
(posiadają działanie całkujące)
Obiekty regulacji, podobnie jak inne elementy automatyki,
klasyfikuje się ze względu na ich własności dynamiczne.
Pojęcie
obiektu regulacji
:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
8
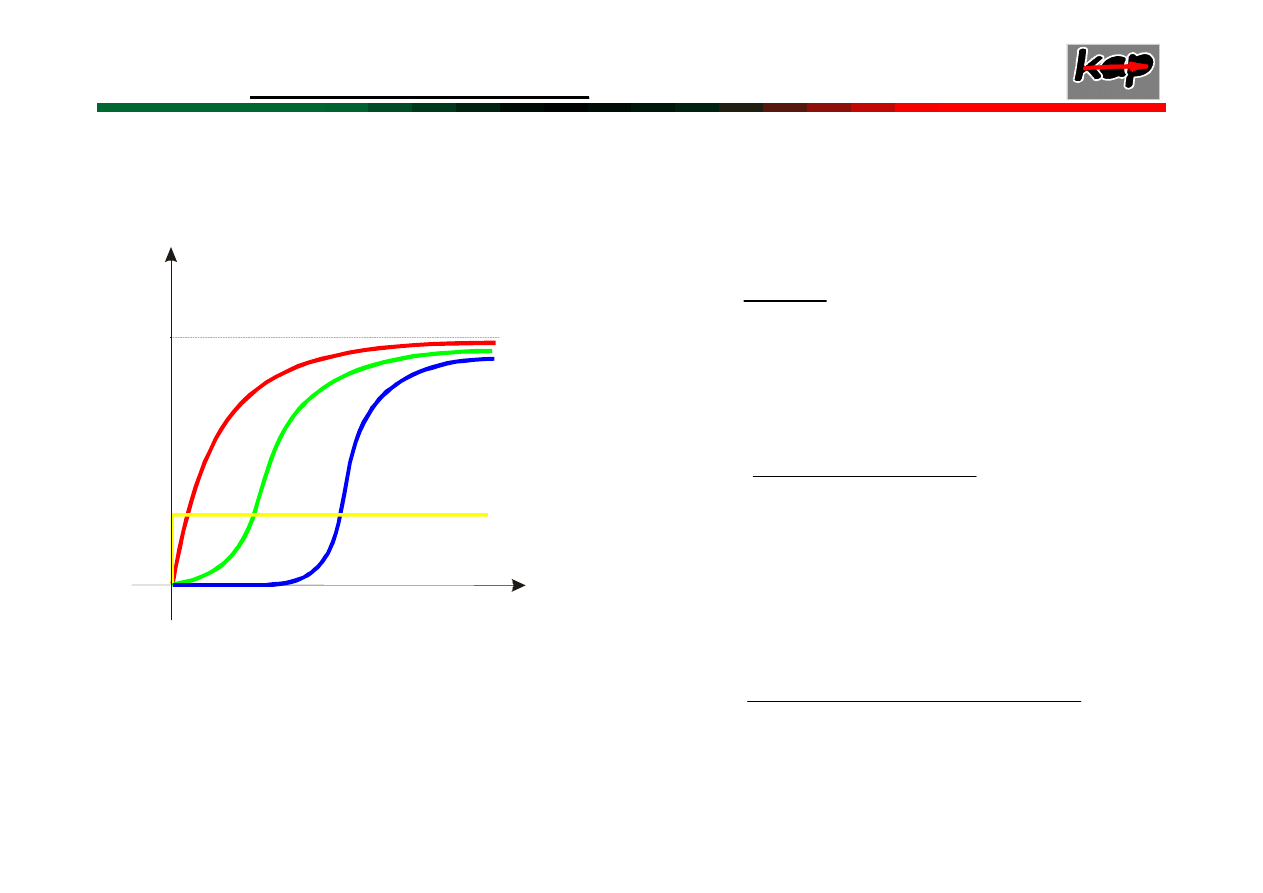
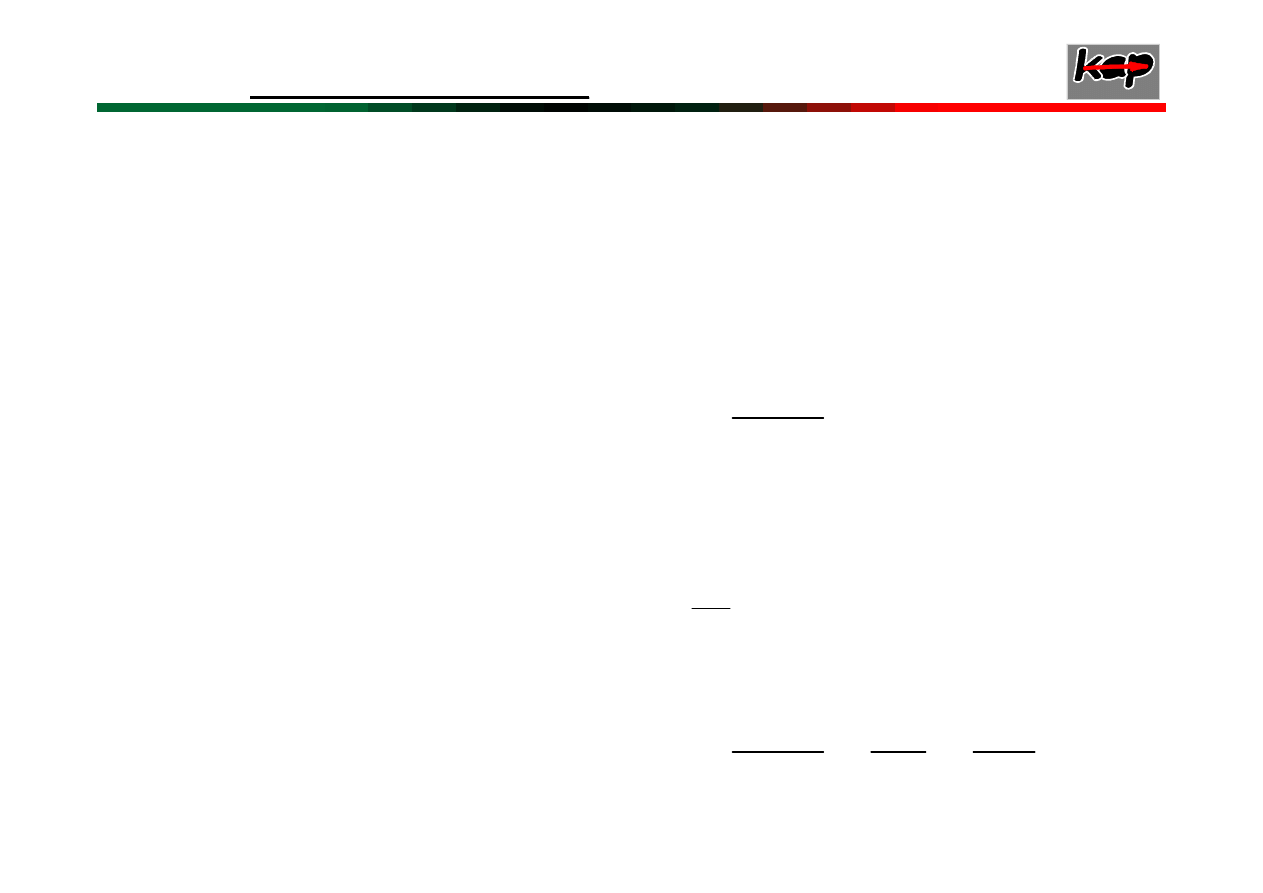
Charakterystyki skokowe obiektów statycznych
3 - inercyjny wyższego rzędu
z opóźnieniem,
( )
1
1
+
=
Ts
k
s
G
1 - inercyjny pierwszego rzędu,
2 - inercyjny wyższego rzędu,
( ) ( )(
)
1
1
2
1
2
+
+
=
s
T
s
T
k
s
G
( ) ( )(
)(
)
s
T
o
e
s
T
s
T
s
T
k
s
G
−
+
+
+
=
1
1
1
3
2
1
3
k – współczynnik wzmocnienia
T
i
– stałe czasowe
T
o
– czas opóźnienia
u
st
ku
st
1
2
3
y,u
st
t
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
9
9
często równania opisujące własności obiektów regulacji
nie są dostatecznie znane i analityczne wyznaczenie
transmitancji jest niemożliwe
9
w takich przypadkach opieramy się na doświadczalnie
wyznaczonych charakterystykach skokowych
9
wyznaczoną doświadczalnie charakterystykę aproksymuje
się graficznie za pomocą inercyjności pierwszego rzędu
i czasu opóźnienia T
o
Charakterystyki skokowe obiektów statycznych
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
10
s
T
e
Ts
k
s
G
0
1
)
(
−
+
=
t
y,u
st
T
T
o
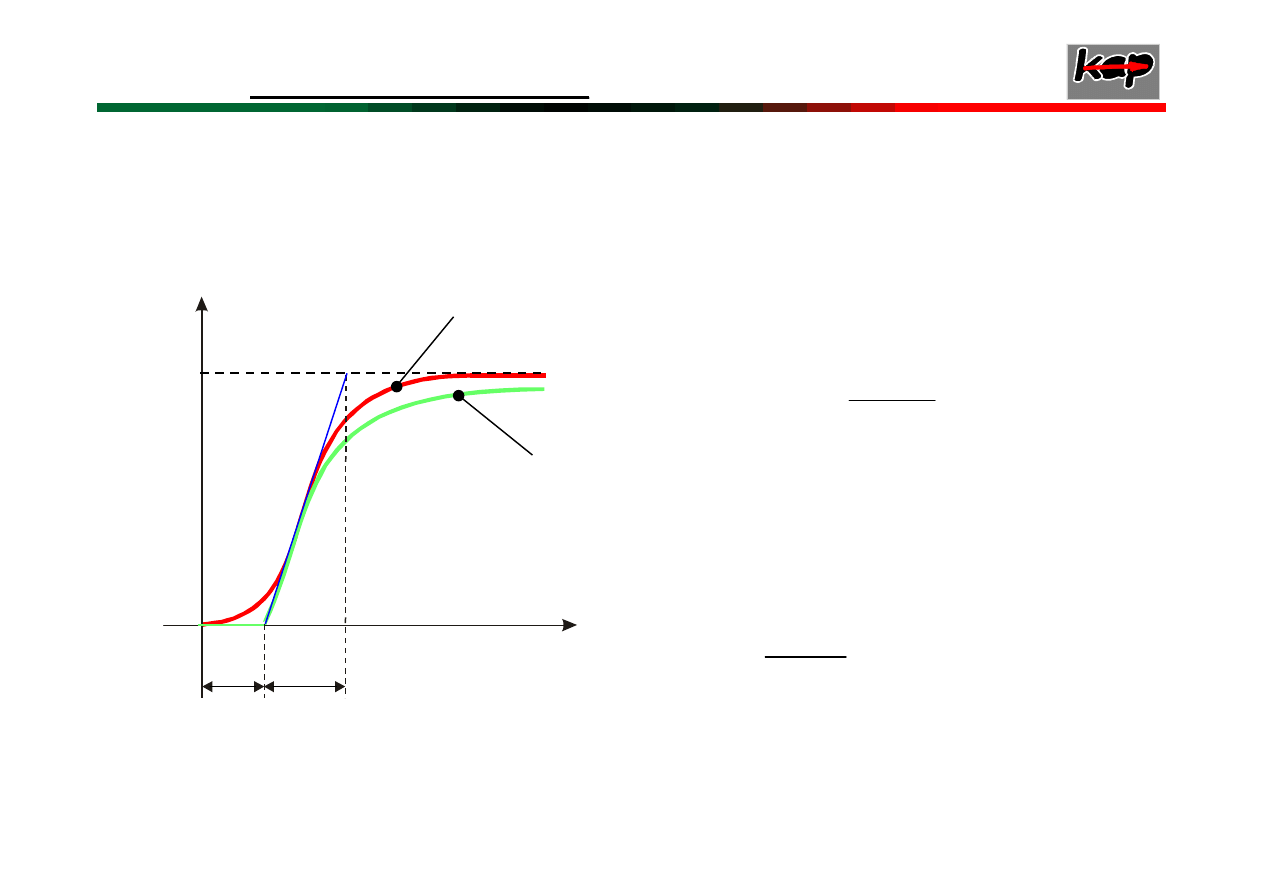
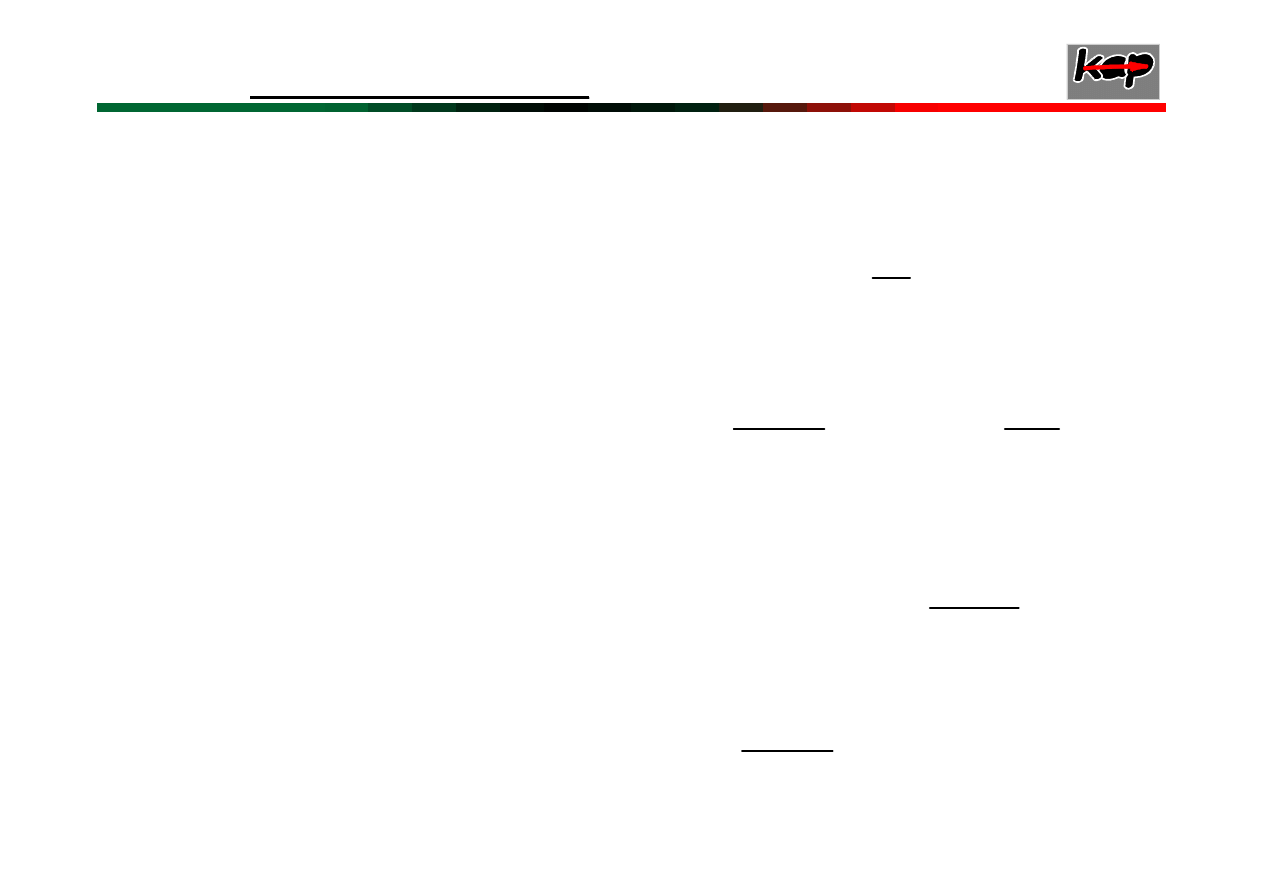
Charakterystyki skokowe obiektów statycznych
charakterystyka
rzeczywista
charakterystyka
aproksymowana
Transmitancja obiektu
zastępczego
k
Równanie różniczkowe
obiektu
)
(
)
(
)
(
0
T
t
kx
t
y
dt
t
dy
T
−
=
+
k – współczynnik wzmocnienia
T – zastępcza stała czasowa
T
o
– czas opóźnienia
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
11
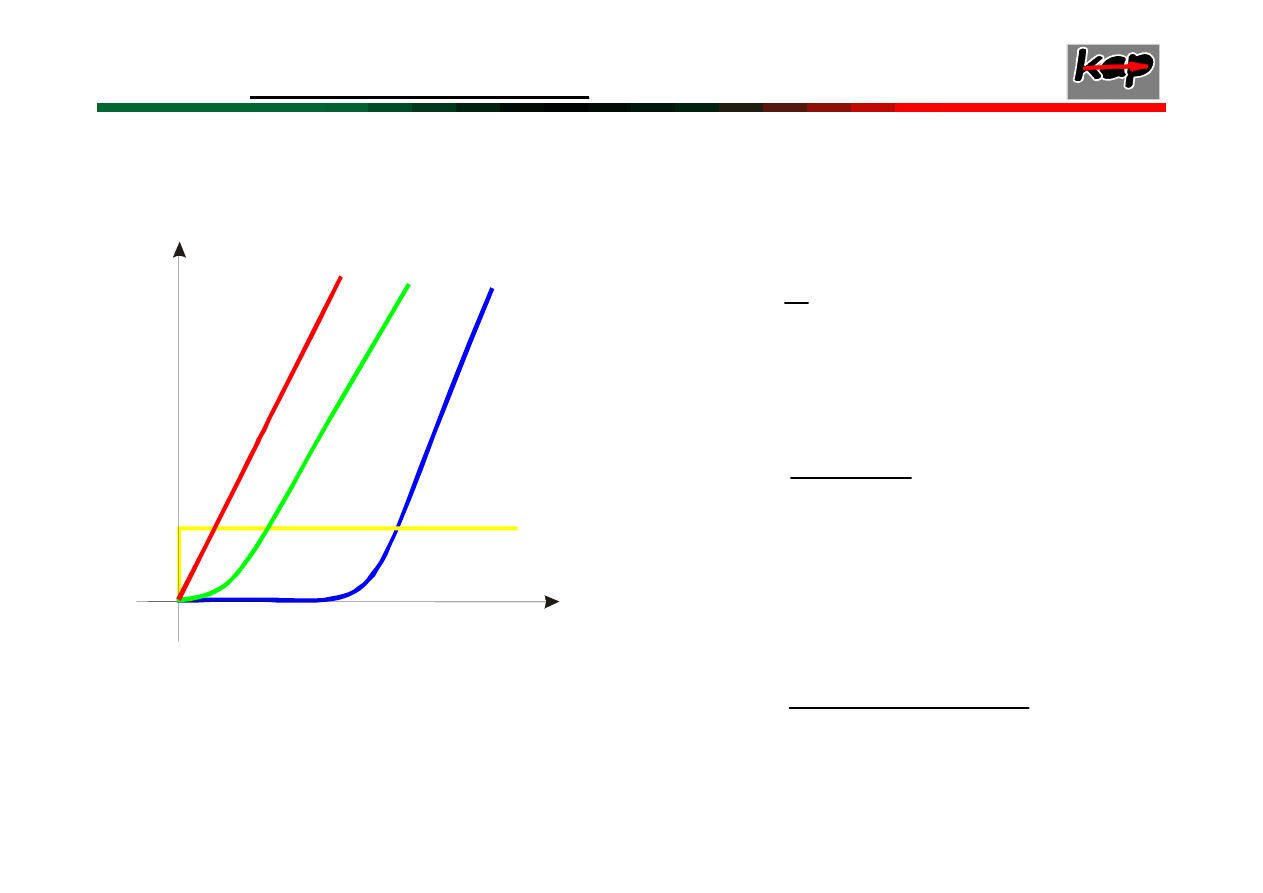
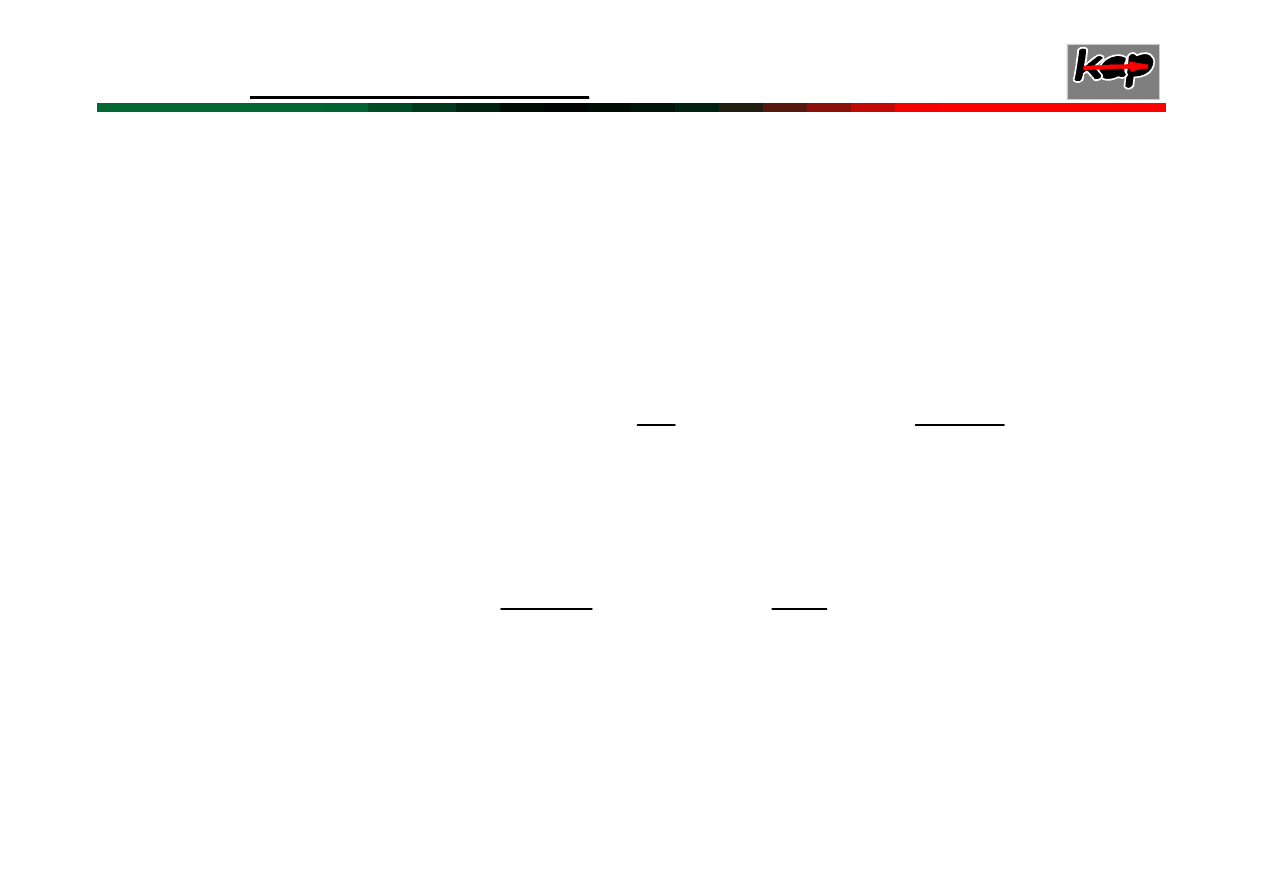
Charakterystyki skokowe obiektów astatycznych
3 – całkujący z inercją wyższego
rzędu i opóźnieniem,
( )
s
k
s
G
=
1
1 – całkujący,
2 – całkujący z inercją I-go rzędu,
( ) ( )
1
2
+
=
Ts
s
k
s
G
( ) ( )(
)
s
T
o
e
s
T
s
T
s
k
s
G
−
+
+
=
1
1
2
1
3
k – współczynnik wzmocnienia
T
i
– stałe czasowe
T
o
– czas opóźnienia
u
st
1
2
3
y,u
st
t
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
12
s
T
s
T
e
Ts
e
s
k
s
G
0
0
1
)
(
−
−
=
=
t
y,u
st
T
o
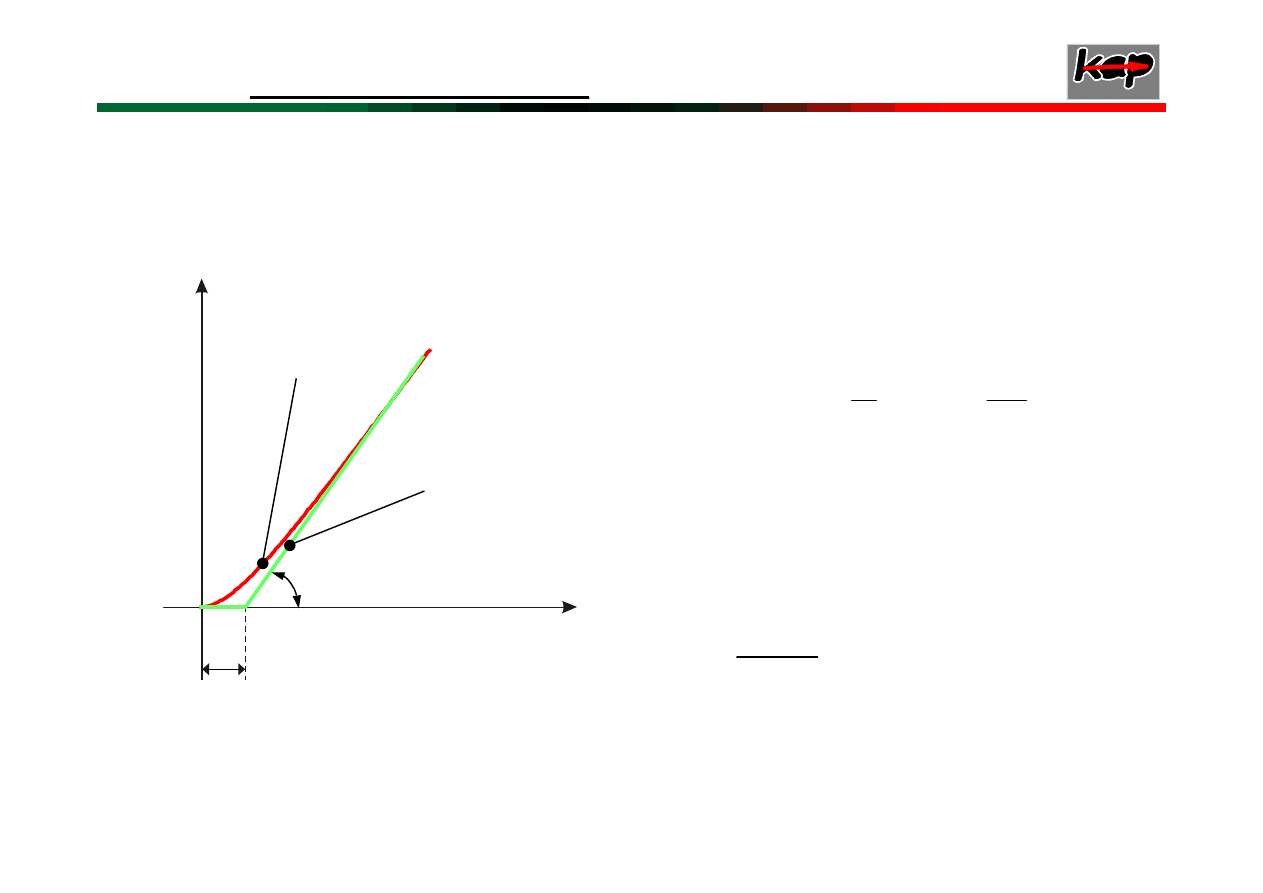
Charakterystyki skokowe obiektów astatycznych
Transmitancja obiektu
zastępczego
Równanie różniczkowe
obiektu
)
(
)
(
0
T
t
kx
dt
t
dy
−
=
k – współczynnik wzmocnienia
T
o
– czas opóźnienia
charakterystyka
rzeczywista
charakterystyka
aproksymowana
tg
α
= k
α
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
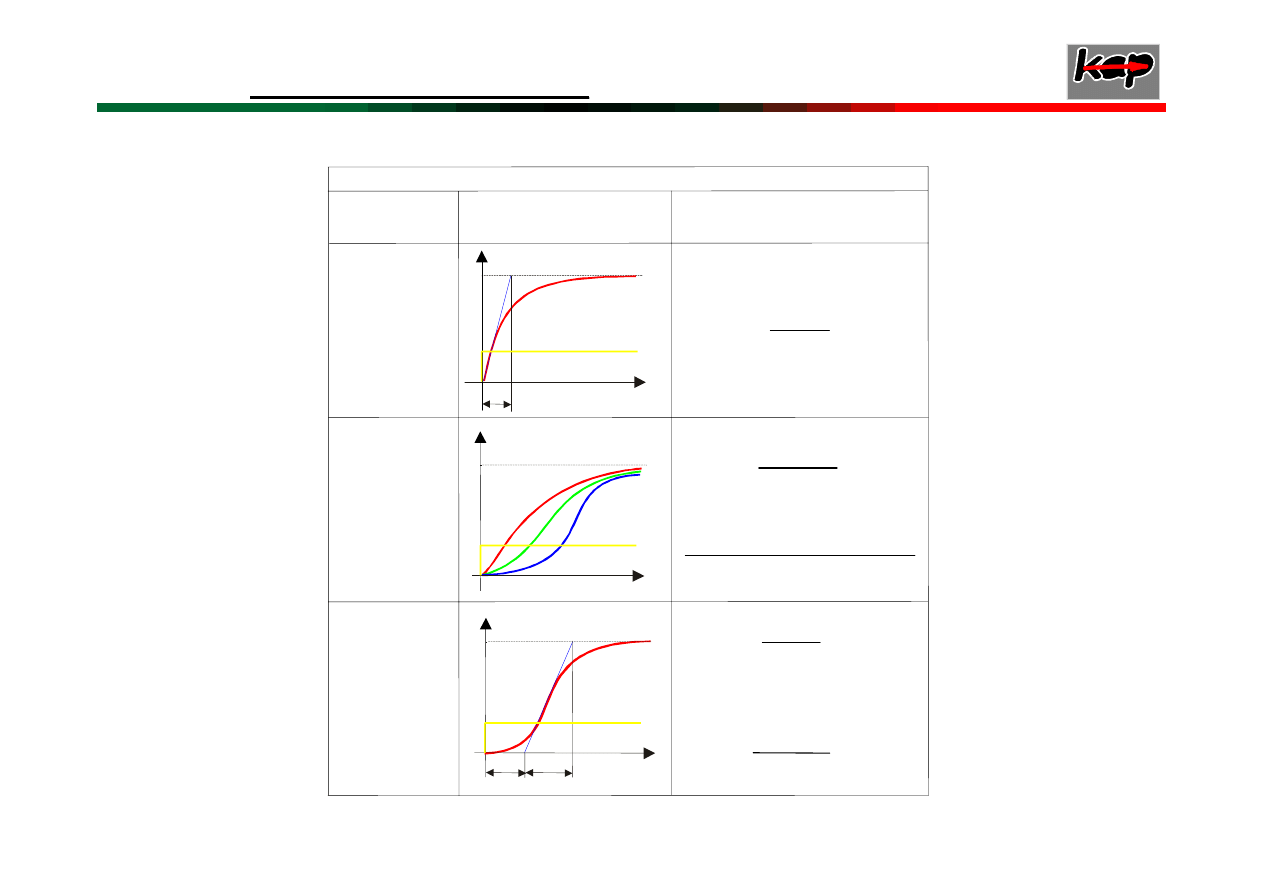
13
Nazwa
Charakterystyka
skokowa
Transmitancja
operatorowa
Inercyjny
I-go rzędu
Ts+1
K
Inercyjny
wyższego
rzędu bez
opóźnienia
(Ts+1)
n
K
lub
(T
1
s+1)(T
2
s+1)…(T
n
s+1)
K
Inercyjny
wyższego
rzędu z
opóźnieniem
lub
T
z
s+1
Ke
-
τ
s
Ke
-
τ
s
(Ts+1)
n
y,u
st
u
st
Ku
st
t
1
2 ... n
y,u
st
u
st
Ku
st
t
T
y,u
st
T
z
τ
t
u
st
OBIEKTY STATYCZNE
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
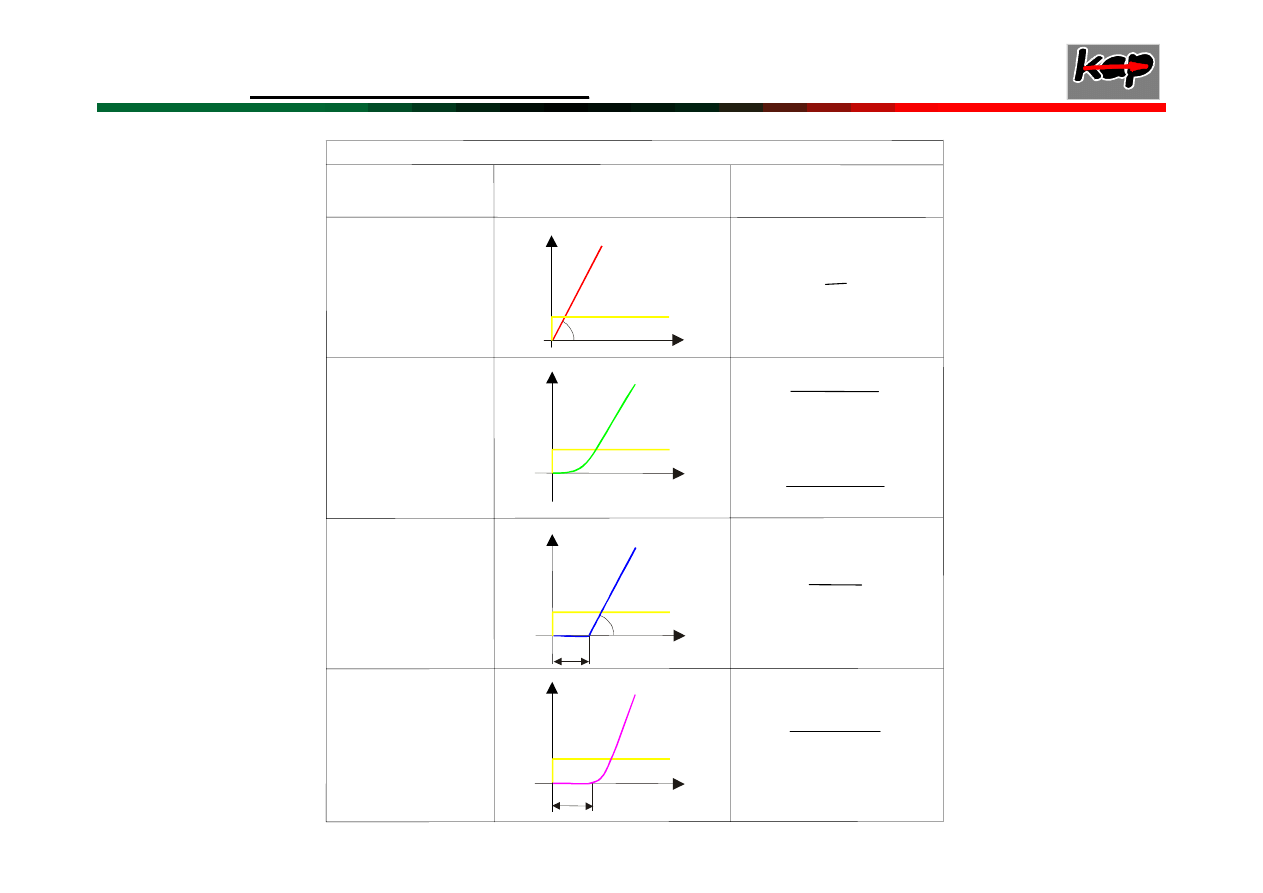
14
Całkujący
s
K
Całkujący z
inercją
bez opóźnienia
s(Ts+1)
K
lub
s(Ts+1)
n
K
Całkujący z
opóźnieniem
s
Ke
-
τ
s
Całkujący z
inercją
i opóźnieniem
Ke
-
τ
s
s(Ts+1)
n
u
st
y
α
y,u
st
t
u
st
y
y,u
st
t
u
st
α
y,u
st
t
τ
y
u
st
y,u
st
t
τ
y
OBIEKTY ASTATYCZNE
Nazwa
Charakterystyka
skokowa
Transmitancja
operatorowa
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
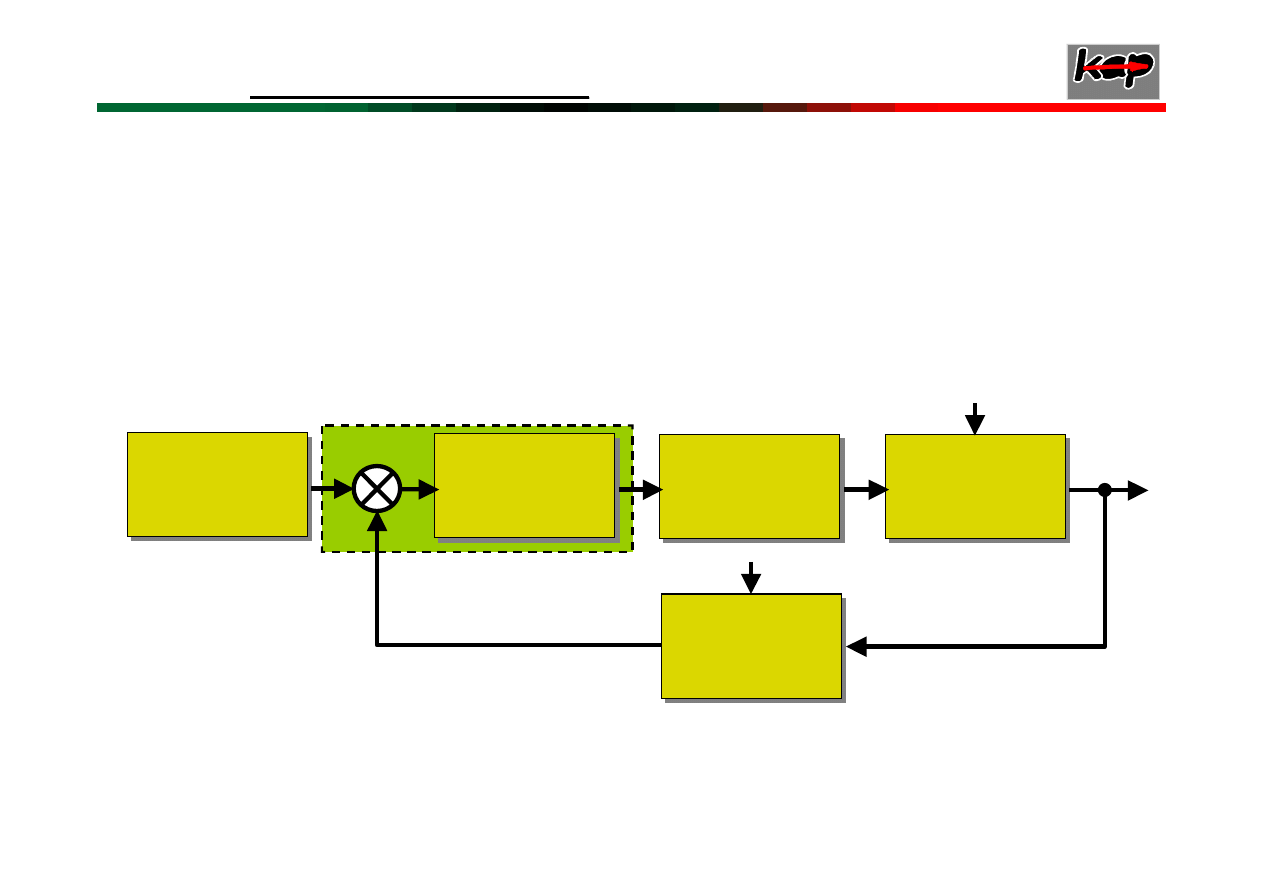
15
Regulatory
Regulator
Element
nastawczy
Element
nastawczy
Algorytm
regulacji
Algorytm
regulacji
Element
wykonawczy
Element
wykonawczy
Obiekt
regulacji
Obiekt
regulacji
Element
pomiarowy
Element
pomiarowy
–
w(t)
w(t)
–
sygnał
wartości
zadanej
e(t)
e(t)
–
sygnał
uchybu
regulacji
u(t)
u(t)
–
sygnał
regulacji
x(t)
x(t)
–
sygnał
sterujący
y(t)
y(t)
y(t)
–
sygnał
regulowany
z
1
(t)
z
2
(t)
z(t)
–
sygnały
zakłócające
w(t)
e(t)
u(t)
x(t)
y(t)
y(t)
z
1
(t)
z
2
(t)
Schemat układu automatycznej regulacji
9
Regulator
– urządzenie porównujące sygnał wartości
zadanej w(t) z sygnałem regulowanym y(t) i wytwarzające
sygnał regulacji u(t) według określonego algorytmu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
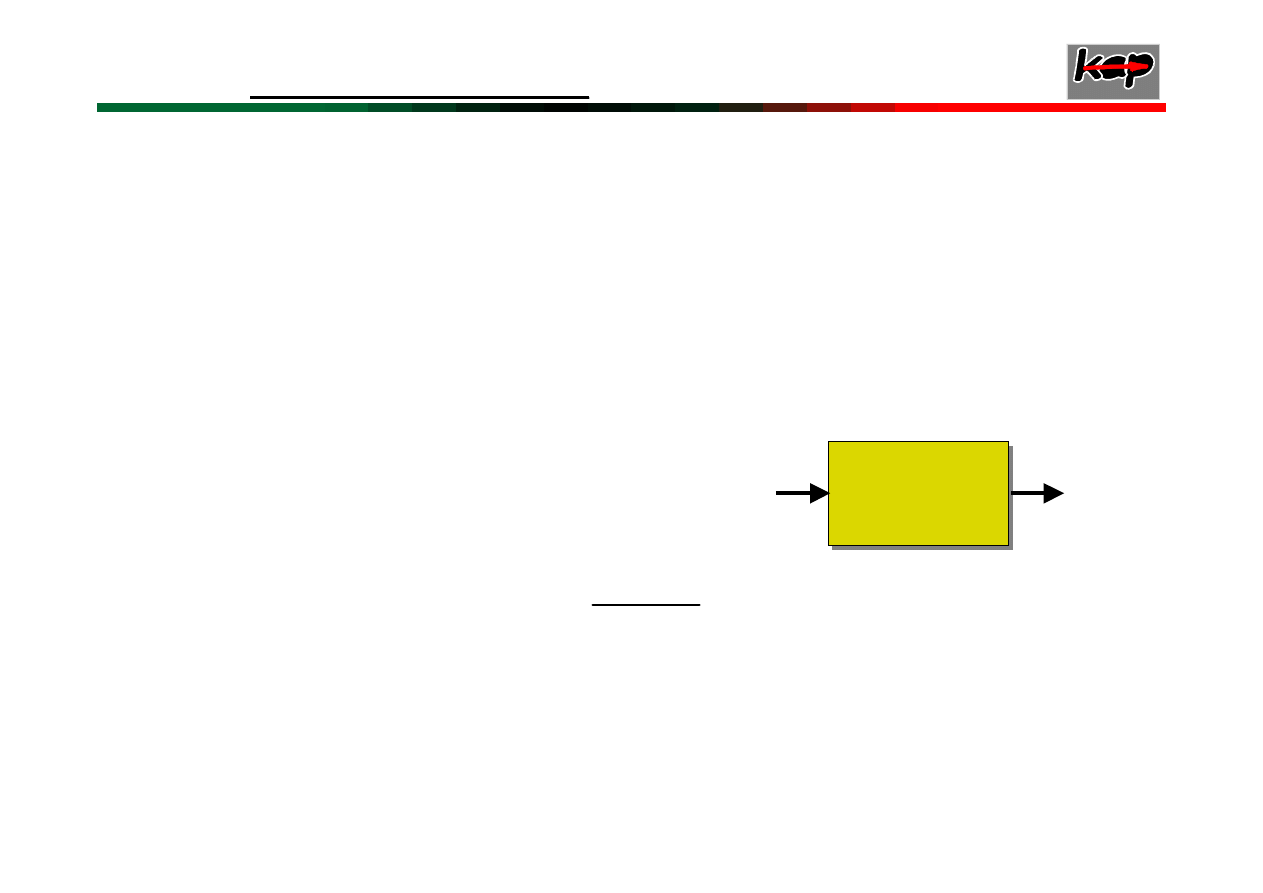
16
)
(
)
(
)
(
s
E
s
U
s
G
R
=
Transmitancja regulatora:
gdzie: E(s) – transformata sygnału wejściowego regulatora
U(s) – transformata sygnału wyjściowego regulatora
W skład regulatora wchodzi:
9
układ formujący sygnał (algorytm działania regulatora)
9
węzeł sumacyjny
Regulatory
G
R
(s)
G
R
(s)
E (s)
U (s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
17
Elementem przenoszącym sygnał sterujący, uformowany w
regulatorze, na obiekt regulacji jest element wykonawczy
(najczęściej jest nim
siłownik
pneumatyczny lub
hydrauliczny).
Elementy układu regulacji
Element pomiarowy (czujnik) dokonuje pomiaru wielkości
wyjściowej. Sygnał z czujnika najczęściej trzeba jeszcze
odpowiednio przekształcić
przy wykorzystaniu
przetworników pomiarowych (dopasowując
standardy
sygnałów).
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
18
9
proporcjonalny (P)
p
R
K
s
E
s
U
s
G
=
=
)
(
)
(
)
(
9
całkowy (I)
s
K
s
T
s
E
s
U
s
G
p
i
R
=
=
=
1
)
(
)
(
)
(
Rodzaje regulatorów:
( )
( )
t
e
K
t
u
p
=
( )
( )
∫
=
t
i
d
e
T
t
u
0
1
τ
τ
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
19
9
proporcjonalno –
całkowy (PI)
+
=
=
s
T
K
s
E
s
U
s
G
i
p
R
1
1
)
(
)
(
)
(
Rodzaje regulatorów:
( )
( )
( )
+
=
∫
t
i
p
d
e
T
t
e
K
t
u
0
1
τ
τ
9
proporcjonalno –
różniczkowy (PD)
(
)
s
T
K
s
E
s
U
s
G
d
p
R
+
=
=
1
)
(
)
(
)
(
( )
( )
( )
+
=
dt
t
de
T
t
e
K
t
u
d
p
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
20
9
proporcjonalno – całkowo – różniczkowy (PID)
+
+
=
=
s
T
s
T
K
s
E
s
U
s
G
d
i
p
R
1
1
)
(
)
(
)
(
Rodzaje regulatorów:
( )
( )
( )
( )
+
+
=
∫
t
d
i
p
dt
t
de
T
d
e
T
t
e
K
t
u
0
1
τ
τ
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
21
gdzie:
K
p
- współczynnik wzmocnienia
T
i
- czas zdwojenia
T
d
- czas wyprzedzenia
Rodzaje regulatorów:
9
rzeczywisty regulator proporcjonalno – różniczkowy (RPD)
+
+
=
=
1
1
)
(
)
(
)
(
Ts
s
T
K
s
E
s
U
s
G
d
p
R
+
+
+
=
=
1
1
1
)
(
)
(
)
(
Ts
s
T
s
T
K
s
E
s
U
s
G
d
i
p
R
9
rzeczywisty regulator proporcjonalno-całkowo-różniczkowy
(RPID)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
22
Parametry regulatorów:
9
zakres proporcjonalności x
p
%
100
1
p
p
K
x
=
9
czas zdwojenia T
i
– wyraża intensywność działania
całkującego
9
czas wyprzedzenia T
d
– określa działanie różniczkujące
regulatora
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
23
9
regulatory nie korzystające z energii pomocniczej
(o działaniu bezpośrednim)
Podział regulatorów ze względu na sposób budowy:
9
regulatory korzystające z energii pomocniczej
(o działaniu pośrednim), czyli wymagające
elementu wykonawczego
Podział regulatorów ze względu na rodzaj przetwa-
rzanych sygnałów:
9
regulatory analogowe
9
regulatory cyfrowe
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
24
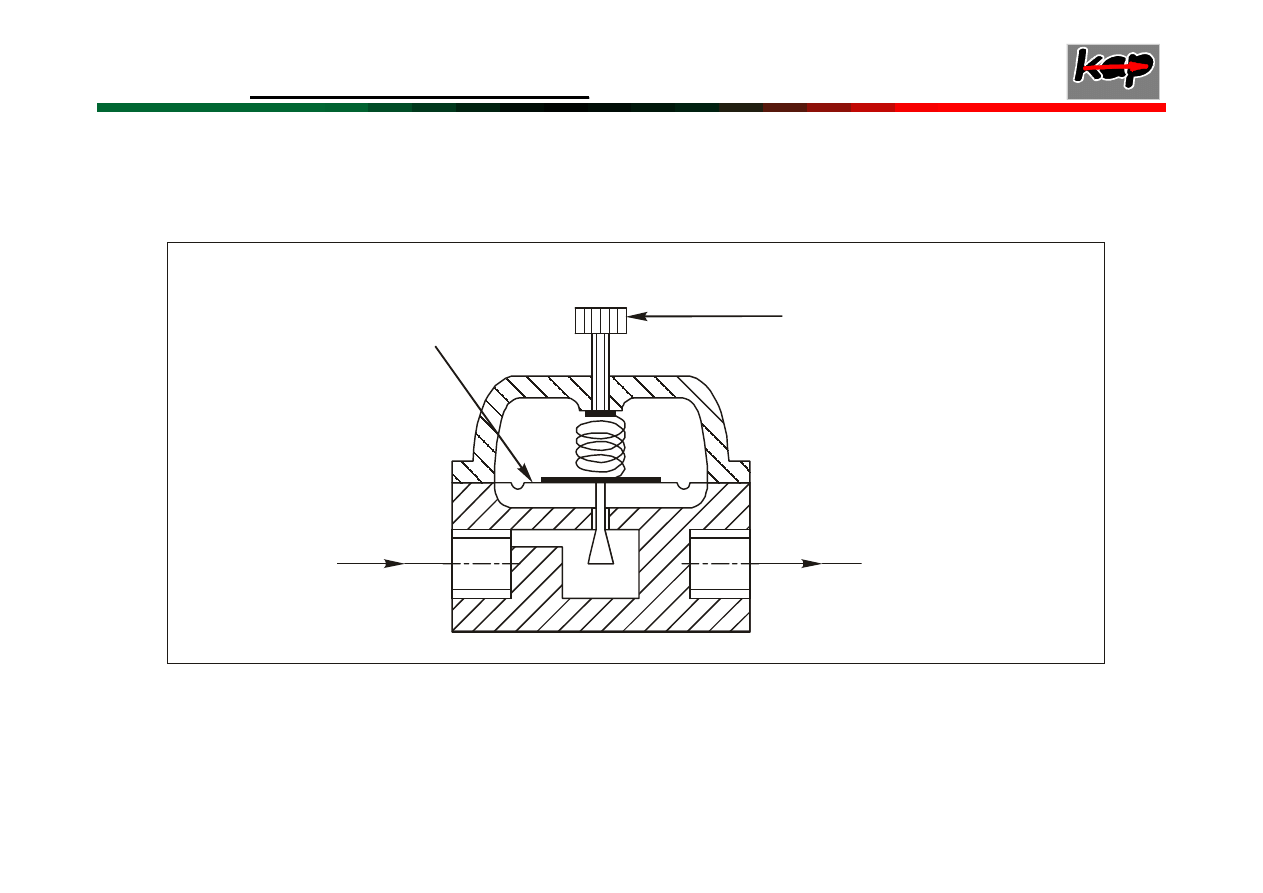
Regulator ciśnienia
Ciśnienie
cieczy
wyjściowej
Ciśnienie
cieczy
wejściowej
Śruba regulacyjna
do nastawiania
wartości zadanej
Membrana
Regulator przemysłowy o działaniu bezpośrednim
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
25
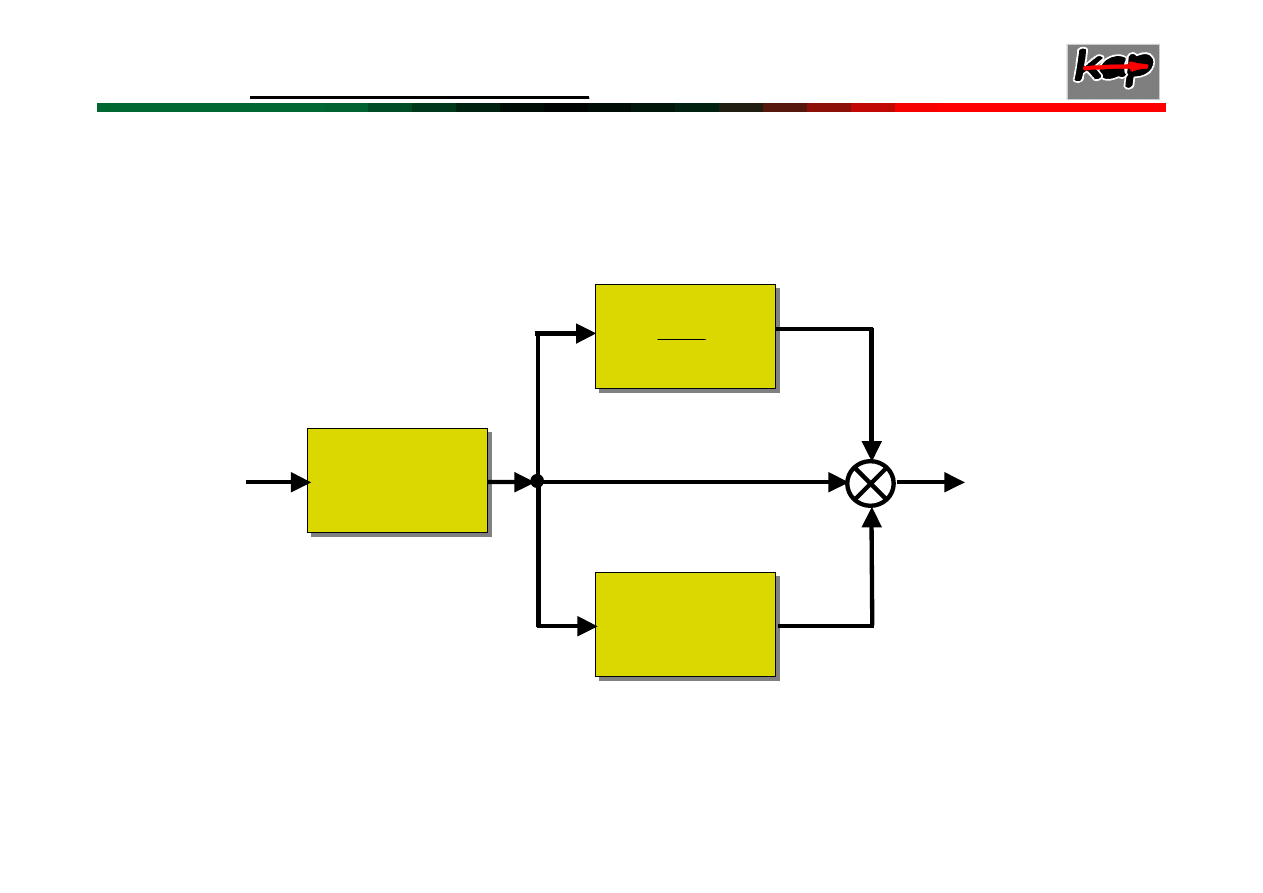
Ogólna struktura regulatora PID
Regulator PID – utworzony z członów podstawowych
(P, I, D)
K
r
K
r
+
s
T
i
1
s
T
d
+
+
e(t)
u(t)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
26
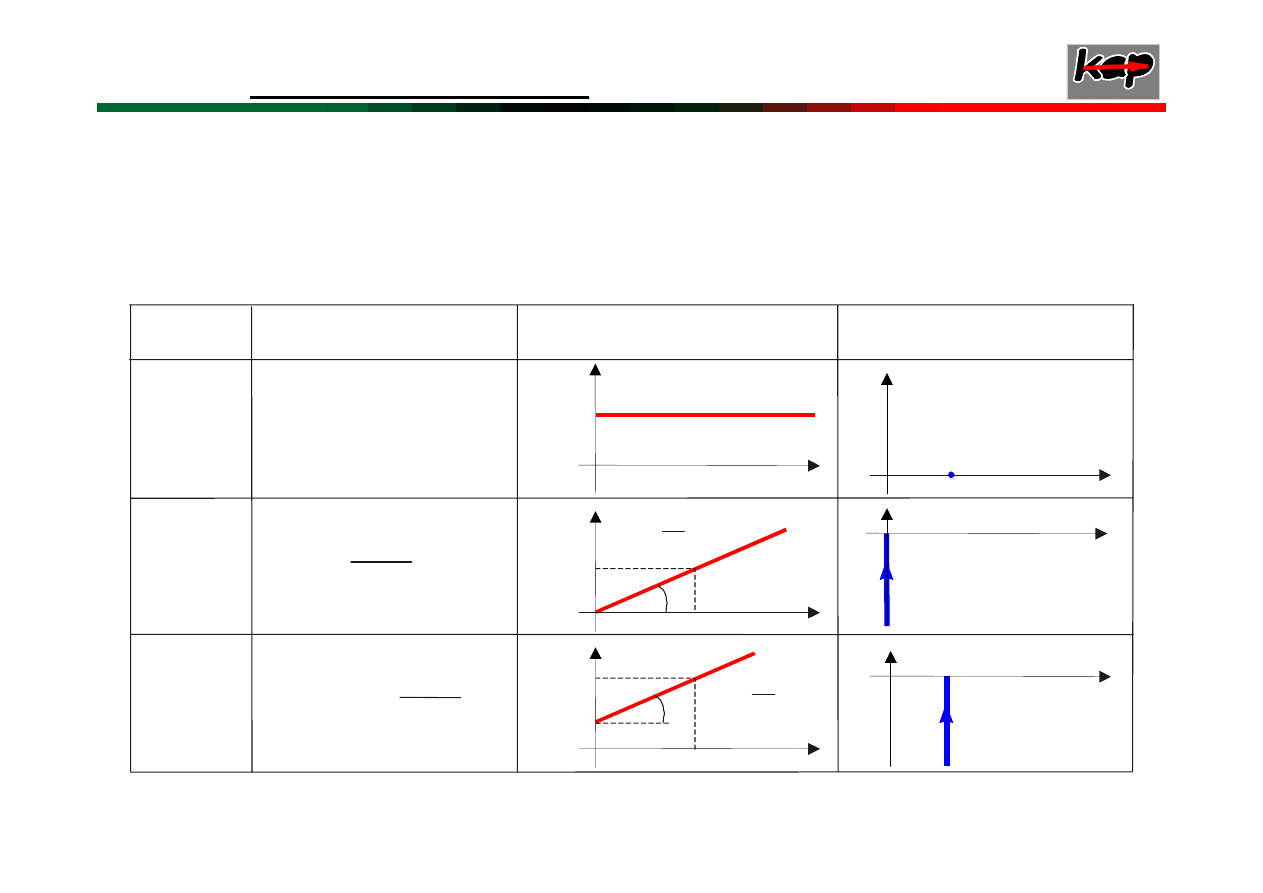
Transmitancje operatorowe, charakterystyki skokowe
i charakterystyki amplitudowo-fazowe typowych regulatorów
Typ
regulatora
G
r
(s)
h(t)
P
I
PI
K
r
Kr(1+ sT
i
1 )
G
r
(jω)
Im
Re
K
r
K
r
>0
K
r
t
K
r
>0
h(t)
sT
i
1
t
T
i
K
r
2K
r
tg
α=
T
i
K
r
α
h(t)
t
1
tg
α=
1
T
i
T
i
h(t)
α
Im
Re
ω
Im
Re
ω
K
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
27
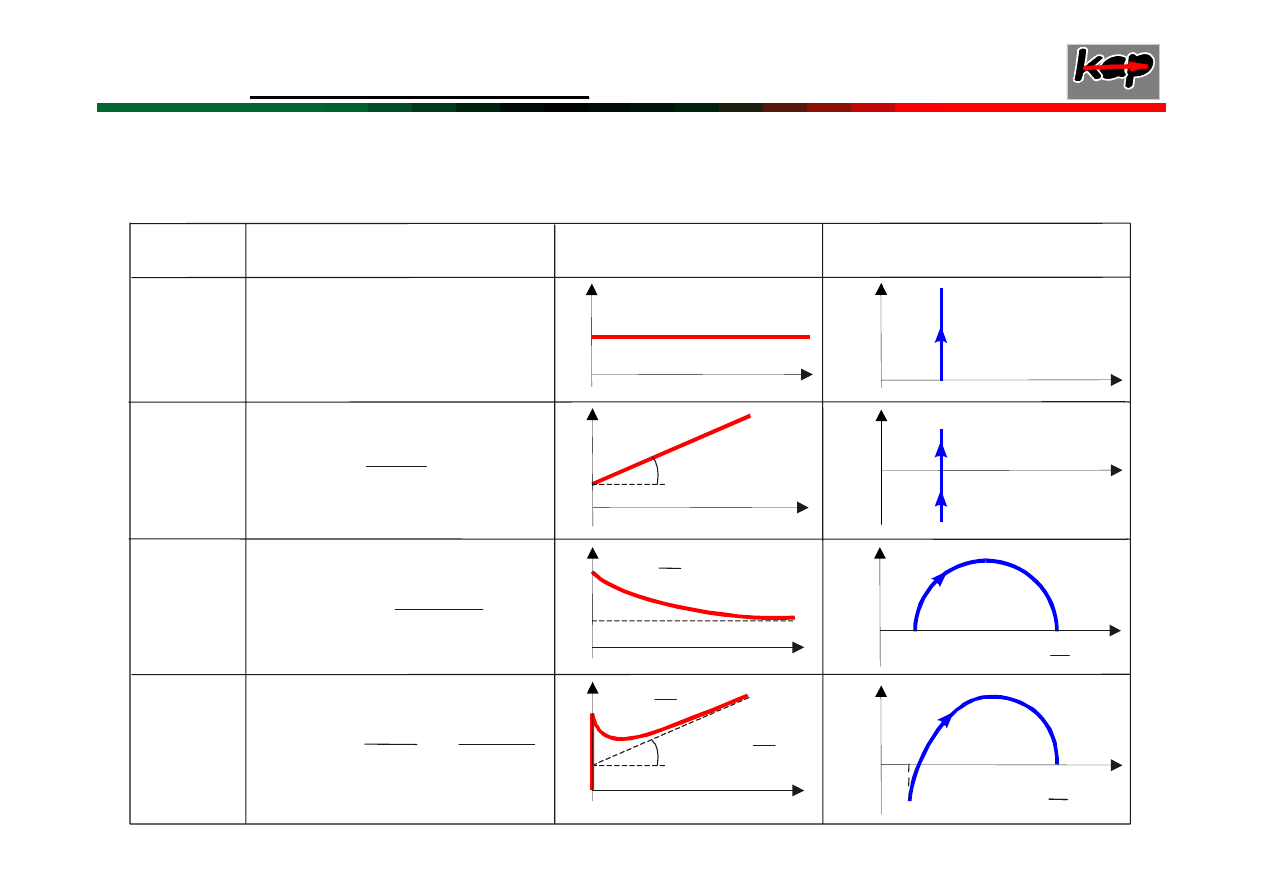
PD
PID
RPD
RPID
K
r
(1+sT
d
)
K
r
(1+
)
sT
d
sT+1
Transmitancje operatorowe, charakterystyki skokowe
i charakterystyki amplitudowo-fazowe typowych regulatorów
Typ
regulatora
G
r
(s)
h(t)
G
r
(jω)
K
r
(1+
sT
i
+sT
d
)
1
K
r
(1+ sT
i
)
sT+1
+
1
sT
d
Im
Re
ω
K
r
T
K
r
(1+ T
d
)
Im
Re
ω
K
r
T
K
r
(1+ T
d
)
Im
Re
ω
Im
Re
ω
t
K
h(t)
t
K
r
α
tg
α=
T
i
T
i
K
r
(1+
T
i
)
h(t)
t
T
i
K
r
(1+
T
i
)
K
r
h(t)
t
T
i
K
r
α
h(t)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
28
Regulatory dwupołożeniowe
9
w dwupołożeniowym układzie regulacji element wykona-
wczy ma tylko dwa ustalone położenia
9
sygnał u(t) pozostaje na poziomie wartości maksymalnej,
albo minimalnej, w zależności od tego, czy sygnał uchybu
jest dodatni, czy ujemny, otrzymujemy:
u(t) = U
1
dla e(t) > 0
u(t) = U
2
dla e(t) < 0
gdzie: U
1
i U
2
- są stałymi
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
29
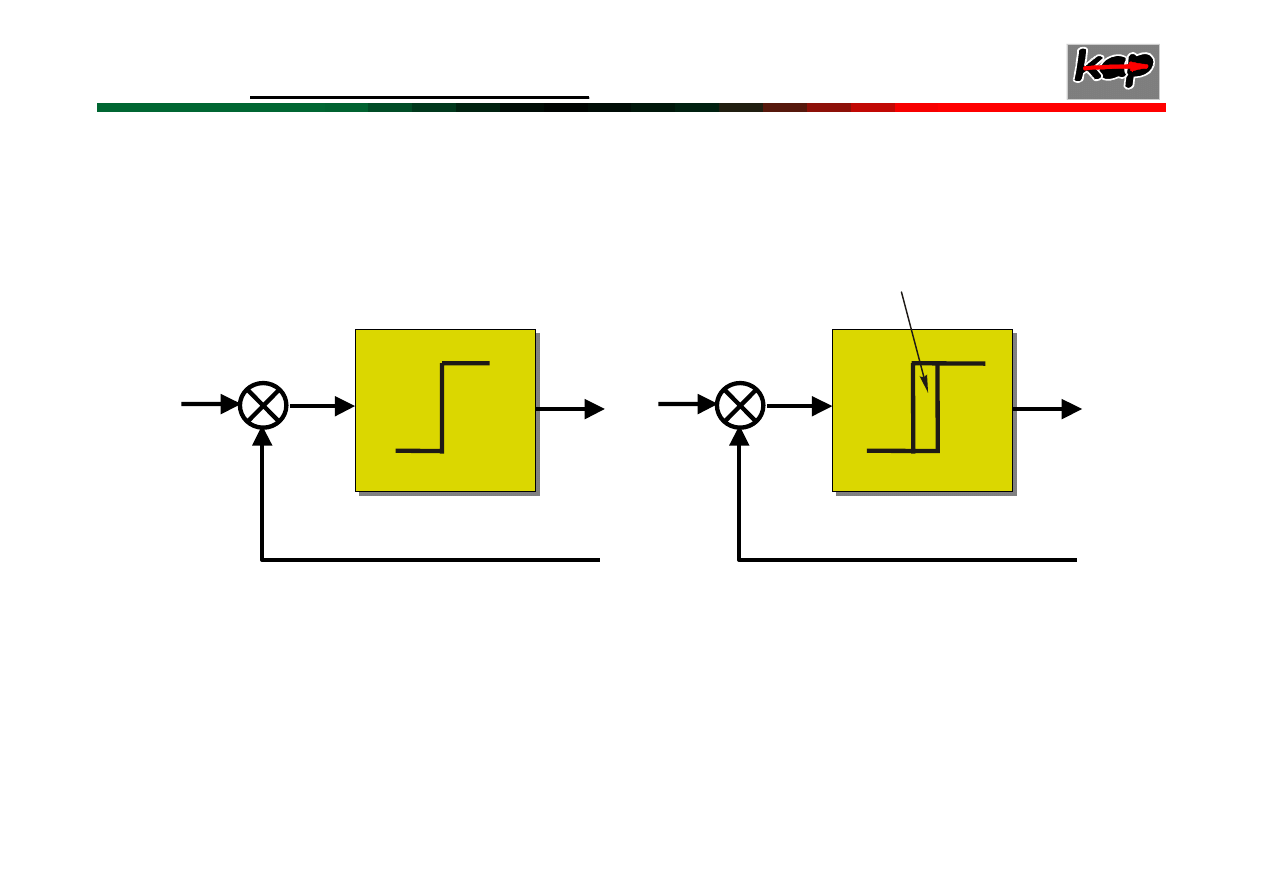
Schematy blokowe regulatora dwupołożeniowego
a)
b)
Strefa nieczułości - obszar, przez jaki musi przejść sygnał
uchybu zanim nastąpi przełączenie
–
+
e(t)
u(t)
U
2
U
1
–
+
e(t)
u(t)
U
2
U
1
Strefa nieczułości
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
30
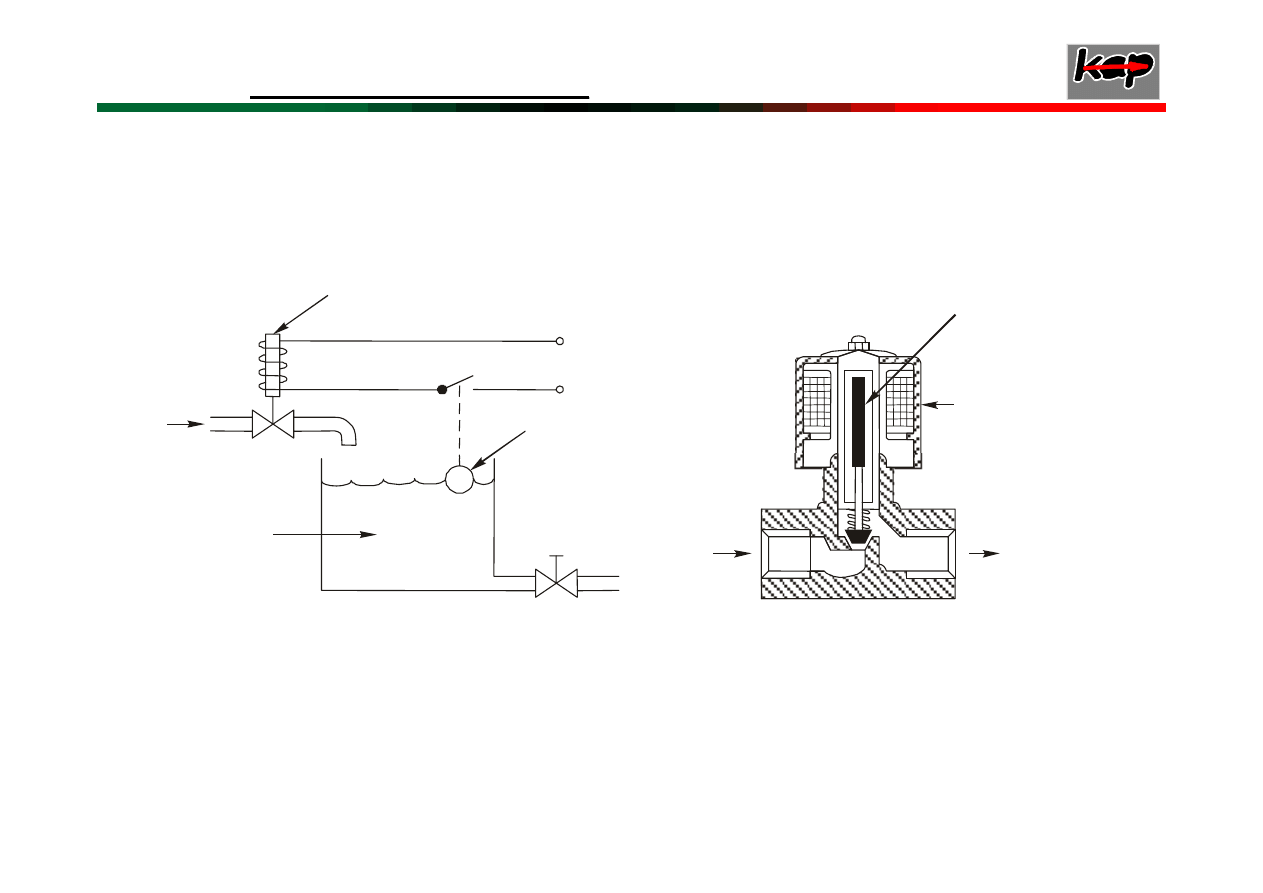
Układ regulacji poziomu cieczy
Przykład: wykorzystanie regulatora dwupołożeniowego
R
(a)
115 V
C
q
i
Pływak
Zawór elektromagnetyczny
(b)
Cewka
magnetyczna
Ruchomy
rdzeń metalowy
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Układ regulacji, jego zadanie i struktura
Temat wykładu:
Temat wykładu:
Układ regulacji, jego zadanie i struktura
Układ regulacji, jego zadanie i struktura
Podstawy Automatyki
Podstawy Automatyki
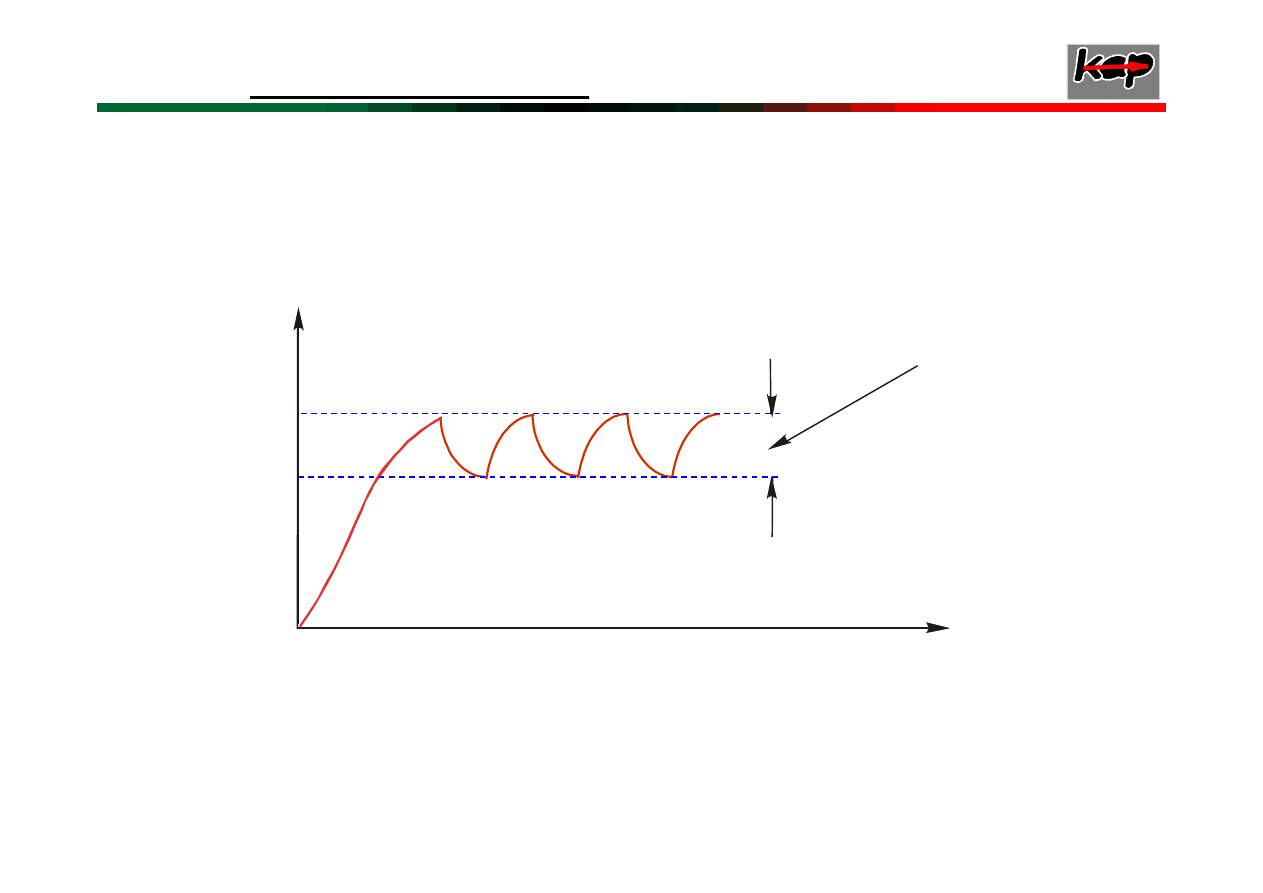
31
h(t)
t
0
Postać sygnału wyjściowego
Strefa nieczułości
Wyszukiwarka
Podobne podstrony:
Układ pokarmowy jego zadania poziom 4 klasa podstawowa
Samorządowy PR. Zadania biura prasowego i PR oraz jego miejsce w strukturze urzędu, Public Relations
Scharakteryzuj zadania działu logistyki i jego miejsce w strukturze przedsiębiorstwa, Logistyka
Samorządowy PR. Zadania biura prasowego i PR oraz jego miejsce w strukturze urzędu, Public Relations
Scharakteryzuj zadania działu logistyki i jego miejsce w strukturze przedsiębiorstwa, Logistyka
Sztaby wojskowe – zadania, struktury i metody pracy
2 Zadania z a struktury (miary przecietne)
2012 06 Technik informatyk arkusz zadaniaid 27644
06 Uklad Kierowniczy
2 Układ równań i nierówności 2 zadania
Elementy indywidualnego programu resocjalizacji i jego zadania
06 Układ krążenia
Gimnazjum przekroj, 26. Układ współrzędnych i wykresy-testowe, Układ współrzędnych i wykresy - zadan
Układ regulacji poślizgu napędu ASR, Instrukcje
Zadania i struktura jednostek samorządu terytorialneg1, Studia, Samorząd terytorialny
Państwowy system nadzoru i kontroli nad warunkami pracy oraz jego zadania i uprawnienia
Cw 10 Uklad regulacyjny stabili Nieznany
więcej podobnych podstron