ULTRADŹWIĘKI
LABORATORIUM
ULTRAMET 2006
SPIS TREŚCI
1.
WSTĘP..........................................................................................
3
2.
ULTRADŹWIĘKI - WPROWADZENIE…………………………….
3
3.
WYTWARZANIE I ODBIÓR FAL ULTRADŹWIĘKOWYCH……..
9
4.
POLE ULTRADŹWIĘKOWE………………………………………...
11
5.
TŁUMIENIE FAL ULTRADŹWIĘKOWYCH………………………..
14
6.
SPRZĘT DO BADAŃ ULTRADŹWIĘKOWYCH…………………..
15
7.
METODY BADAŃ ULTRADŹWIĘKOWYCH………………………
22
8.
ZASTOSOWANIE FAL ULTRADŹWIĘKOWYCH………………...
27
9.
PRZEBIEG ĆWICZENIA……………………………………………..
32
10.
ZARYS OBSŁUGI PROGRAMU…………………………………….
46
” Ultradźwięki ” Laboratorium
2
1. WSTĘP
Niniejsze opracowanie stanowi instrukcję na zajęcia laboratoryjne prowadzone w ramach przedmiotu
" Fizyka " dla studentów szkół wyższych. Może również być wykorzystane w laboratoriach inżynierii materia-
łowej, badań nieniszczących, diagnostyki technicznej i eksploatacji, akustyki itp.
Opracowanie składa się z trzech części. Część pierwsza zawiera podstawowe informacje o ultradźwię-
kach. Omówione są podstawowe zjawiska fizyczne towarzyszące propagacji fal ultradźwiękowych w ośrod-
kach oraz przy padaniu fali ultradźwiękowej na granicę dwóch ośrodków. Przedstawiono sposoby wytwarza-
nia i detekcji ultradźwięków, sprzęt do badań ultradźwiękowych, metody badawcze oraz sposób ich wyko-
rzystania w praktyce. W części drugiej zawarte są propozycje ćwiczeń do wykonania przez studentów w
czasie zajęć laboratoryjnych, w których wykorzystano komputerowy ultradźwiękowy defektoskop cyfrowy
UMT-17. Część trzecia zawiera skrótową instrukcję obsługi defektoskopu UMT-17.
2. ULTRADŹWIĘKI – WPROWADZENIE
Fale akustyczne polegają na wzajemnym przekazywaniu sobie ruchu drgającego przez atomy albo czą-
steczki ośrodka. W zależności od częstotliwości drgań fale akustyczne dzielimy na : infradźwięki ( 0.1..16 Hz
) , dźwięki słyszalne ( 16Hz..20 kHz ) i ultradźwięki ( powyżej 20 kHz ) . W ośrodku sprężystym cząstki drga-
jące wokół położenia równowagi przekazują część energii sąsiednim cząstkom - drgania cząstek prze-
mieszczają się w ośrodku tworząc falę ultradźwiękową.
Fale ultradźwiękowe ( zwane też falami mechanicznymi ) , w odróżnieniu od fal elektromagnetycznych
mogą rozchodzić się tylko w ośrodkach materialnych przenoszących drgania sprężyste. Dla małych wychy-
leń cząstki wokół położenia równowagi przyjmujemy, że ruch cząstek jest harmoniczny:
ω
ϕ
ϕ
ω
ω
c
x
t
A
c
x
t
A
a
=
−
=
−
=
;
)
(
)
(
sin
sin
gdzie : a - wychylenie chwilowe , A - amplituda wychylenia ,
ω = 2π f - częstotliwość kątowa , t - czas , x -
współrzędna położenia ( drogi ) , c - prędkość fali.
Prędkość drgania cząstki materialnej wokół położenia równowagi nazywamy prędkością akustyczną
υ
( nie mylić z prędkością fali c ) :
)
cos(
ϕ
ω
ω
υ
−
=
=
t
A
dt
da
Czas T , po którym wartości chwilowe powtarzają się, nazywamy okresem. Faza
ϕ jest to wychylenie
kątowe, przy którym drgająca cząstka osiąga chwilową wartość wychylenia.
Długość fali
λ to najmniejsza odległość między dwiema sąsiednimi drgającymi cząstkami znajdującymi
się w tej samej fazie. Jeżeli fala rozchodzi się w ośrodku z prędkością c to obowiązuje związek :
” Ultradźwięki ” Laboratorium
3
;
f
c
cT
=
=
λ
gdzie :
λ - długość fali, T - okres drgań f = 1 / T .
W ośrodku nieograniczonym fale ultradźwiękowe rozchodzą się ze swego źródła w sposób przestrzen-
ny. Sąsiednie cząstki drgające w tej samej fazie tworzą powierzchnię falową. Jeżeli powierzchnia falowa
tworzy płaszczyznę prostopadłą do kierunku rozchodzenia się fali - to jest to fala płaska. W przypadku, gdy
powierzchnie falowe są współśrodkowymi walcami to mamy do czynienia z falami walcowymi.
Źródła o małych wymiarach ( źródła punktowe ) wytwarzają fale kuliste. Ich powierzchnie falowe mają
kształt współśrodkowych powierzchni kulistych ze środkiem w punktowym źródle fal. Dla fal kulistych wychy-
lenie cząstek maleje ze wzrostem odległości r od źródła :
);
(
sin
c
r
t
r
A
a
−
=
ω
Dla bardzo dużych wartości r fala kulista przechodzi w falę płaską.
Fala ultradźwiękowa przechodząc przez ośrodek wytwarza naprężenia w ośrodku. Siła naprężeń w od-
niesieniu do powierzchni wytwarza ciśnienie akustyczne p, związane z prędkością akustyczną
υ :
υ
⋅
= z
p
gdzie : z jest akustyczną impedancją falową ośrodka w którym rozchodzi się fala.
Ciśnienie akustyczne jest wielkością mierzalną, bowiem w przetwornikach elektroakustycznych stoso-
wanych w technice ultradźwiękowej, sygnał elektryczny z przetwornika jest proporcjonalny do ciśnienia aku-
stycznego.
W ośrodkach nieograniczonych, dla fal płaskich i kulistych, impedancja akustyczna ma charakter rze-
czywisty, i wtedy jest to akustyczna oporność falowa ( impedancja charakterystyczna ) określona jako :
c
z
⋅
=
ρ
gdzie :
ρ - gęstość ośrodka, c - prędkość fali.
Jeżeli fala ultradźwiękowa rozchodzi się w ośrodku o akustycznej oporności falowej
ρc , to w ośrodku
tym powstaje ciśnienie akustyczne :
p
A c
t
x
c
P
t
=
−
=
−
ω ρ
ω
ω ϕ
cos( (
))
cos(
);
gdzie : P =
ωAρc - amplituda ciśnienia akustycznego
Jeśli zmiany ciśnienia mają charakter harmoniczny to możemy wprowadzić wartości skuteczne :
” Ultradźwięki ” Laboratorium
4
P
P
V
V
sk
sk
=
=
2
2
Dla fal płaskich lub kulistych natężenie fali :
I
P V
PV
P
c
sk
sk
=
=
=
1
2
1
2
2
ρ
W / m
2
W typowych zastosowaniach pomiarowych fale ultradźwiękowe osiągają natężenia poniżej 0.1 W/cm
2
.
Zakładając takie natężenie fali ( 0.1 W/cm
2
) , w tabeli poniżej podano zestawienie wybranych parametrów
dla fali podłużnej o częstotliwości 1 MHz rozchodzącej się w powietrzu, wodzie aluminium i stali.
Ośrodek
I
natężenie
fali
f
często-
tliwość
ρ
gęstość
ośrodka
c
prędkość
fali
z
impedancja
ośrodka
λ
długość
fali
P
amplituda
ciśnienia
A
amplituda
wychylenia
[W/cm
2
] [Hz] [g/cm
3
] [m/s] [kg/m
2
s] ·10
6
[mm] [Mpa] [µm]
powietrze 0.1 1·10
6
0.001293 333 0.000430569 0.333 0.00092 0.3402
woda 0.1 1·10
6
1 1480 1.48 1.48
0.05440
0.0058
aluminium 0.1 1·10
6
2.7 6320
17.06 6.32
0.18471
0.001724
stal 0.1
1·10
6
7.85 5940
46.629 5.94
0.30538
0.001042
Zauważmy, jak znikome są amplitudy wychyleń cząstek ośrodka spowodowane przemieszczaniem się
fali ultradźwiękowej o takim natężeniu ( od dziesiątych części mikrometra dla powietrza do tysięcznych czę-
ści mikrometra dla stali ) . Fala po przejściu przez ośrodek nie zmienia go ( nie niszczy ) - stąd zastosowanie
ultradźwięków do badań materiałów technicznych czy organizmów żywych jest dla nich bezpieczne.
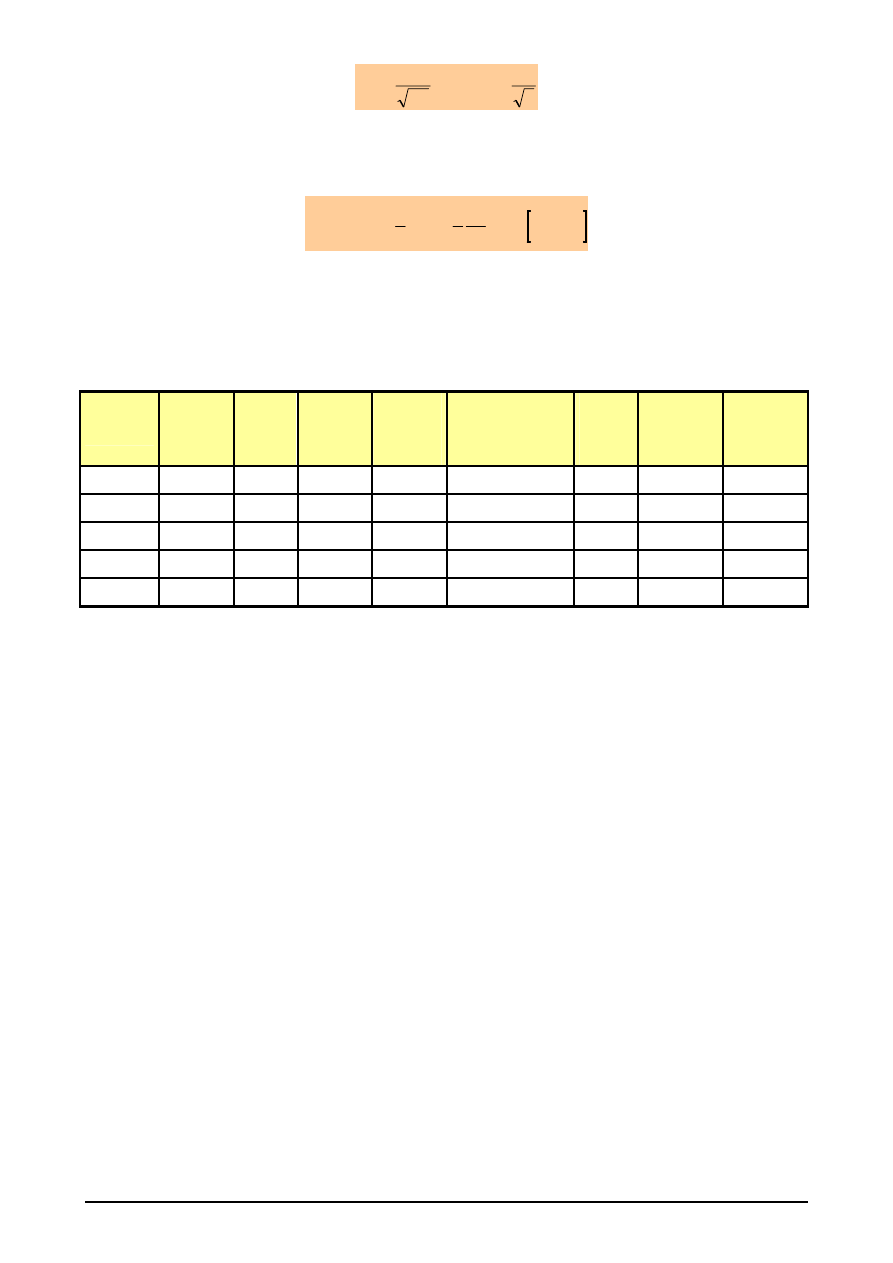
2.1 RODZAJE FAL ULTRADŹWIĘKOWYCH
Fale ultradźwiękowe dzielimy na kilka rodzajów w zależności od toru drgającej cząstki względem kie-
runku rozchodzenia się fali, jak pokazano na rysunku poniżej :
” Ultradźwięki ” Laboratorium
5
Wychylenia
cząstek
Kierunek
fali
Rodzaj
fali
Podłużna
Poprzeczna
Lamba
Powierzchniowa
Rodzaje fal ultradźwiękowych
Fale podłużne - cząstki ośrodka drgają prostoliniowo zgodnie z kierunkiem rozchodzenia się fali, po-
wstają naprzemian zagęszczenia i rozrzedzenia cząstek ośrodka, przy czym dochodzi również do oscylacyj-
nych zmian jego objętości. Fale te rozchodzą się w każdym ośrodku materialnym. Aby w ośrodku rozchodzi-
ła się czysta fala podłużna to wymiary ośrodka muszą być wystarczająco duże w stosunku do długości fali
λ
. Fale te oznaczamy symbolem L a ich prędkość symbolem c
L
.
Fale poprzeczne - tzw. fale ścinania, powodują naprężenia styczne. Rozchodzeniu się tych fal nie to-
warzyszą zmiany gęstości ośrodka. Cząstki ośrodka drgają w płaszczyźnie prostopadłej do kierunku roz-
chodzenia się fali. Fale te rozchodzą się tylko w ośrodkach stałych. Fale poprzeczne oznaczamy symbolem
T a ich prędkość symbolem cT . Prędkość cT jest zawsze mniejsza od cL dla danego ośrodka.
Fale powierzchniowe ( Rayleigha ) - rozchodzą się na powierzchni swobodnej ciała stałego, wnikając
na głębokość około jednej długości fali. Mamy tu do czynienia ze szczególnym przypadkiem fal poprzecz-
nych, gdyż drgania cząstek składają się z dwóch wektorów. Wektor prostopadły do powierzchni swobodnej (
a więc do kierunku rozchodzenia się fali ) ma o wiele większą wartość niż wektor równoległy. Stąd ruch czą-
stek odbywa się po smukłej elipsie. Fale powierzchniowe oznaczamy symbolem R a ich prędkość symbolem
cR . Dla danego ośrodka obowiązuje relacja : cR < cT <cL .
Fale płytowe ( Lamba ) - rozchodzą się w ośrodku ograniczonym dwoma równoległymi płaszczyznami,
których odległość jest porównywalna z długością fali i nie przekracza kilku długości fali. Przesunięcia czą-
stek są wynikiem nakładania się na siebie dwóch fal powierzchniowych, biegnących po obydwu powierzch-
niach w tym samym kierunku.
2.2 PRĘDKOŚĆ ROZCHODZENIA SIĘ FAL ULTRADŹWIĘKOWYCH
W ciałach stałych w ośrodku nieograniczonym prędkość fal podłużnych c
L
oraz prędkość fal po-
przecznych c
T
przedstawiają wzory :
” Ultradźwięki ” Laboratorium
6
)
2
1
)(
1
(
)
1
(
ν
ν
ρ
ν
−
+
−
=
E
c
L
)
1
(
2
ν
ρ
ρ
+
=
=
E
G
c
T
gdzie : E - moduł sprężystości wzdłużnej, G - moduł sprężystości poprzecznej,
ρ - gęstość materiału, ν - licz
ba Poissona .
Stosunek prędkości cT/cL zależy tylko od liczby Poissona :
)
1
(
2
2
1
ν
ν
−
−
=
L
T
c
c
Prędkość rozchodzenia się fal powierzchniowych jest zawsze mniejsza od cT :
T
R
c
c
⋅
+
+
≈
ν
ν
1
112
.
1
87
.
0
W cieczach i gazach rozchodzą się tylko fale podłużne. Prędkość tych fal wynosi :
c
K
L
=
ρ
gdzie : K - adiabatyczny moduł sprężystości objętościowej.
2.3 ZJAWISKA NA GRANICY OŚRODKÓW
Mówimy, że dwa ośrodki są różne jeśli prędkości fal w obu ośrodkach są różne ( c
1
≠ c
2
) lub akustycz-
ne impedancje falowe są różne ( z1 ≠ z2 ). Granica ośrodków to powierzchnia rozdzielająca dwa różne
ośrodki.
2.3.1 Prostopadłe padanie na granicę ośrodków
Jeżeli fala ultradźwiękowa o ciśnieniu akustycznym P pada prostopadle na granicę dwóch ośrodków 1 i
2 , to część fali odbija się z ciśnieniem akustycznym P1 do ośrodka 1 , a część z ciśnieniem P2 przenika do
ośrodka 2 . Przy prostopadłym padaniu fala odbita i przenika-
jąca są tego samego rodzaju, co fala padająca.
1
2
P
P
1
P
2
z
1
= ρ
1
c
1
z = ρ c
2
2
2
Prostopadłe padanie fali na granicę
dwóch ośrodków
Relacje między ciśnieniami fal określają ciśnieniowe współ-
czynniki odbicia R i przenikania D , natomiast relacje miedzy
natężeniami fal energetyczne współczynniki R
I
i D
I
:
R
D
z
z
z
P
P
D
z
z
z
z
P
P
R
+
=
+
=
=
+
=
=
−
1
;
2
;
1
2
2
1
2
1
2
2
1
(
)
(
)
1
;
4
;
2
2
2
1
2
1
2
1
1
2
1
2
=
+
+
=
=
+
−
=
=
I
I
I
I
D
R
z
z
z
z
I
I
D
z
z
z
z
I
I
R
” Ultradźwięki ” Laboratorium
7
Rozważmy przypadek prostopadłego padania fali podłużnej w stali na granicę (1) stal – (2) powietrze. Obli-
czone współczynniki wynoszą :
R = - 0.999982017 D = 0.000017983 RI = 0.999964034
DI = 0.000035965; P1 = - 0.999982017P; P2 = 0.000017983P
I1 = 0.999964034I I2 = 0.000035965I
Widzimy, że ciśnienie fali przenikającej jest znikome natomiast ciśnienie fali odbitej jest praktycznie równe
ciśnieniu fali padającej, lecz z przeciwnym znakiem - co znaczy że fala odbita ma fazę przeciwną do padają-
cej. Przypadek ten, często spotykany w praktyce, dowodzi, że fale biegnące wewnątrz elementów stalowych
niemal całkowicie odbijają się od ich powierzchni.
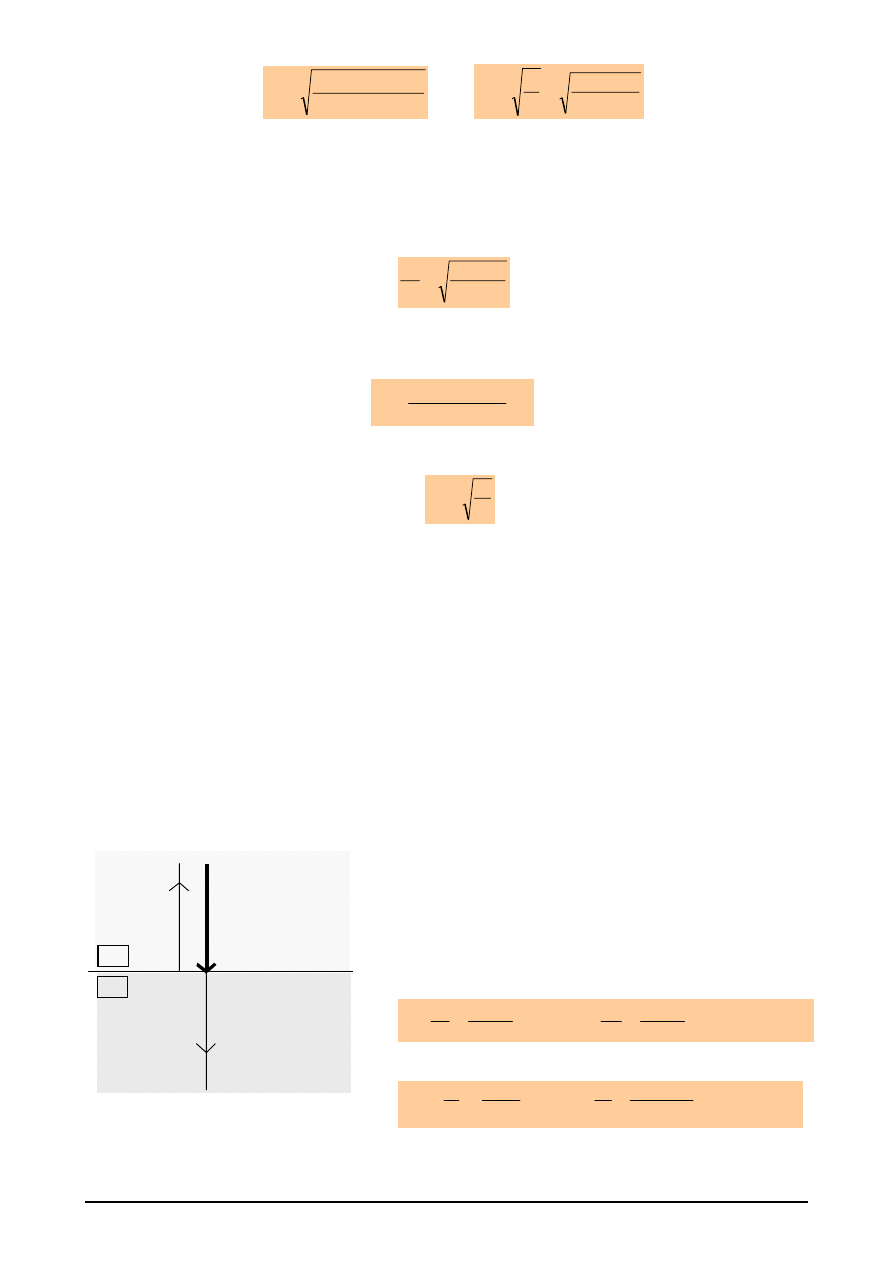
2.3.2 Ukośne padanie fali ultradźwiękowej na granicę ośrodków
Fala ultradźwiękowa padając ukośnie na granicę dwóch różnych ośrodków ulega odbiciu, załamaniu
oraz ewentualnie również transformacji - gdy jeden z ośrodków jest zdolny przenosić naprężenia styczne.
Jeżeli fala podłużna pada na granicę dwóch ciął stałych 1 i 2 , to
ogólnie w każdym z nich mogą powstać dwie składowe , z któ-
rych jedna jest podłużna a druga poprzeczna.
Wzajemny związek między kątami wszystkich składowych,
mierzonymi od normalnej do kierunku rozchodzenia się fali, a ich
prędkościami jest określony prawem Snelliusa :
Podobnie jak w przypadku prostopadłego padania fali na
granicę ośrodków można zdefiniować ciśnieniowe i energetycz-
ne współczynniki odbicia i przenikania. Współczynniki te opisują ilościowo podział energii fali padającej na
fale odbite, załamane i transformowane. Jednak zależności te są na tyle złożone, że ich szersza dyskusja
przekracza zakres tego opracowania. Przedstawimy tylko jeden poglądowy przykład , dla granicy ośrodków
„PMM- stal”, jak wpływa kąt padania fali podłużnej na względne ciśnienie akustyczne oraz na rodzaje fal w
stali. ( „PMM” to skrót od nazwy polimetakrylan metylu –czyli szkło organiczne albo pleksi).
L
T
1
1
L
T
L
2
2
β
β
α
α
α
L1
T1
L1
L2
T2
1
2
Ukośne padanie na granicę dwóch ośrodków
sin
sin
sin
sin
α
α
β
β
L2
L
L
T
T
T
T
L
c
c
c
c
1
1
1
1
2
2
2
=
=
=
L
T
R
Kąt padania
0
5
10
15
20
25
30
35
40
45
50
55
60
65 70
75
80
T
” Ultradźwięki ” Laboratorium
8
3. WYTWARZANIE I ODBIÓR FAL ULTRADŹWIĘKOWYCH
Jednym ze sposobów wytworzenia fali ultradźwiękowej jest wykorzystanie drgającego źródła, które
przekazuje energię do ośrodka z nim sprzężonego. Najczęściej jako źródeł używa się przetworników elek-
troakustycznych, bazujących na odwracalnym zjawisku piezoelektrycznym. Popularne materiały piezoelek-
tryczne używane w technice ultradźwiękowej to : kryształy naturalne ( kwarc (SiO2 ), turmalin, sól Seignett'a
) ; kryształy sztuczne ( siarczan litu ( LiSO4 ), metaniobian ołowiu ) oraz polikrystaliczne materiały ceramicz-
ne ( piezoceramiki ) takie jak tytanian baru( BaTiO3 ) , tytanian ołowiu, cyrkonian ołowiu ( PbZrO3 ).
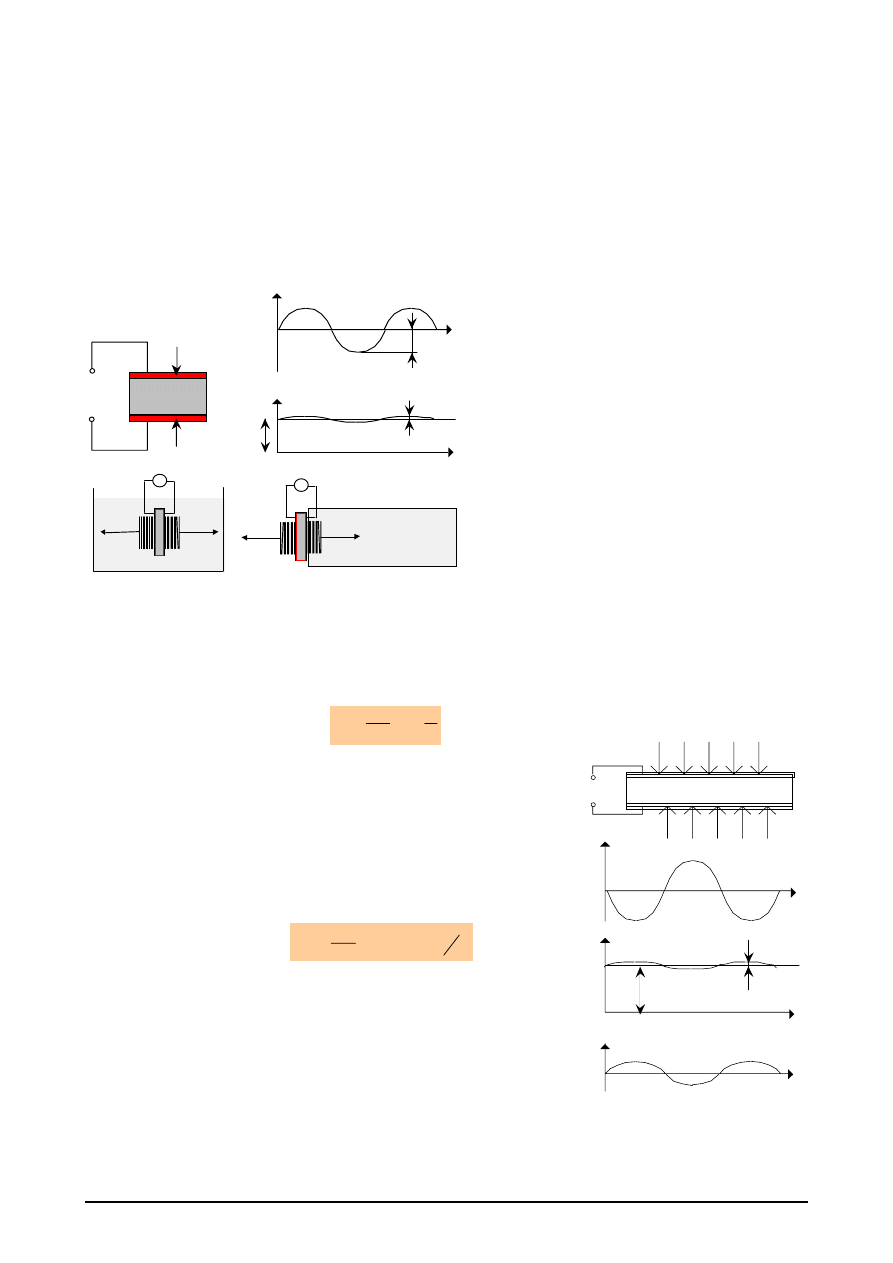
Jeżeli do cienkiej płytki piezoelektryka, posre-
brzonej na obu płaszczyznach, dołączymy
zmienne w czasie napięcie to grubość płytki
będzie się zmieniać w takt zmian napięcia. Je-
śli drgająca powierzchnia płytki piezoelek-
trycznej " sprzęgnięta ” jest z innym ośrodkiem
( np. zanurzona w cieczy albo przyklejona do
ciała stałego ) to drgania płytki przeniosą się
do ośrodka tworząc podłużną falę ultradźwię-
kową w tym ośrodku. Sprzężenie z ciałem sta-
łym można zapewnić również przez dociśnię-
cie płytki przez cienką warstwę cieczy ( np.
wody czy oleju ) . Najlepszą skuteczność prze-
twarzania energii elektrycznej na mechaniczną uzyskuje się dla częstotliwości rezonansowej, gdy grubość
g
0
jest wielokrotnością połowy długości fali w przetworniku :
g
0
+
-
Δ g
∼
L
L
Wykorzystanie zjawiska piezoelektrycznego
U(t)
g(t)
g
0
t
t
Δ g
max
U
m
∼
L
L
U(t)
do wytwarzania fal podłużnych
2
2
0
λ
⋅
=
=
n
f
c
g
r
U(t)
g(t)
P(t)
U(t)
P
g
0
t
t
Δ g
t
gdzie : fr - częstotliwość rezonansowa przetwornika, c - prędkość fali w
przetworniku ,
λ – długość fali w przetworniku, n – liczba natu-
ralna ( typowo stosuje się n = 1 ) .
Związek między przyrostem grubości
Δg a napięciem Um określa
współczynnik piezoelektryczny d
ik
:
[ ]
V
m
U
g
d
m
ik
Δ
=
Jak już wspomniano zjawisko piezoelektryczne jest odwracalne.
Jeśli na płytkę działa zmienne w czasie ciśnienie akustyczne p , to na
skutek sprężystości płytki zmienia się jej grubość ( ściskanie, rozciąga-
nie ), a dzięki zjawisku piezoelektrycznemu indukujące się ładunki elek-
tryczne w płytce powodują różnicę potencjałów na jej okładkach.
Największe zmiany grubości g , a w konsekwencji napięcia U, uzyskuje się, gdy częstotliwość zmian ci-
śnienia jest równa częstotliwości rezonansowej płytki. Powstające napięcie U powiązane jest z ciśnieniem P
” Ultradźwięki ” Laboratorium
9
przez ciśnieniową stałą piezoelektryczną gik
[ ]
Pa
m
V
P
g
U
g
ik
⋅
⋅
=
Dobrym przykładem tego efektu jest popularna zapalniczka
piezoelektryczna, gdzie silne uderzenie „młoteczka” w po-
wierzchnię płytki piezoelektryka powoduje wytworzenie chwi-
lowej wysokiej różnicy potencjałów między okładkami i prze-
skok iskry. Oczywiście w przypadku ultradźwięków o małym
natężeniu siła oddziaływania fali na piezoelektryk jest kilka
rzędów wielkości mniejsza i powstające napięcie jest również
bardzo małe.
iskra
piezoelektryk
uderzenie
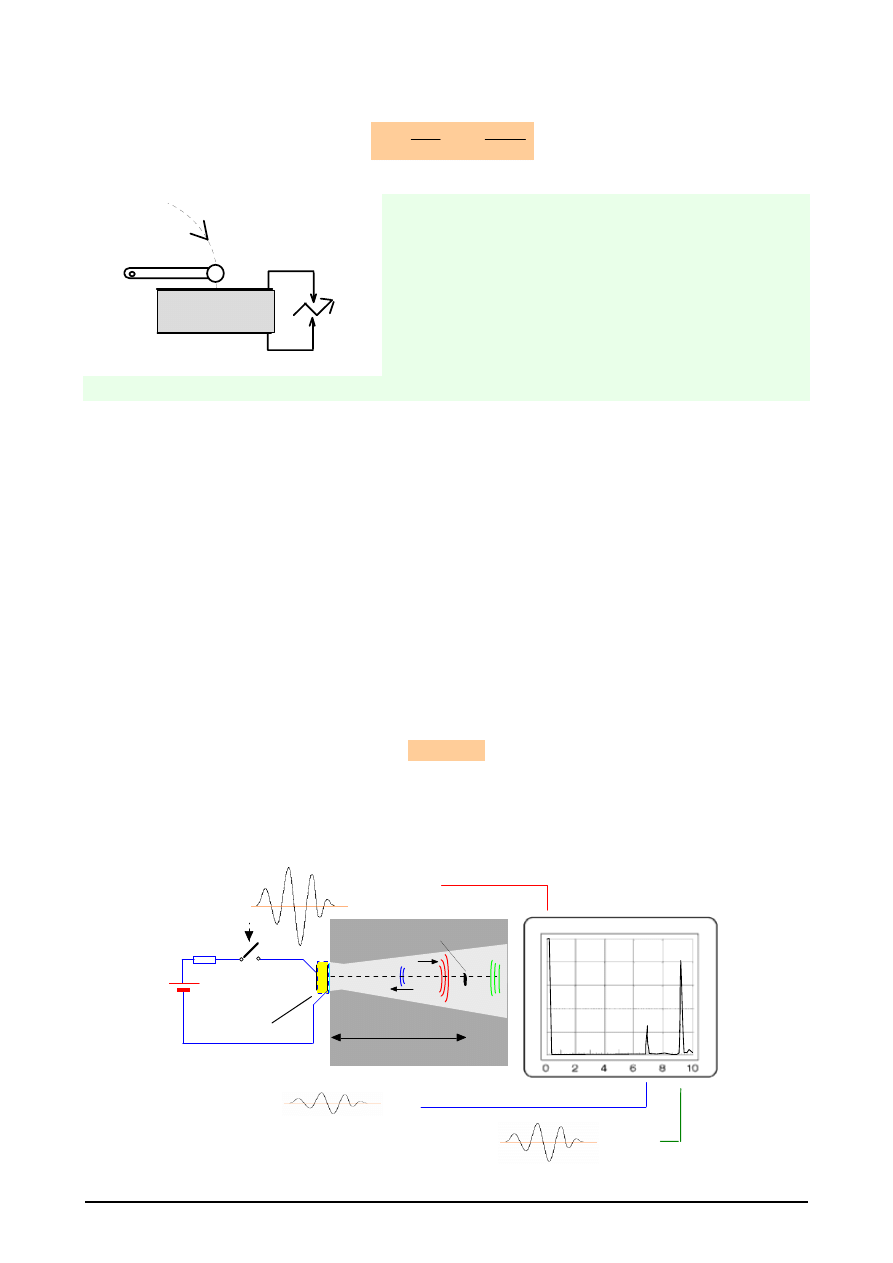
Z płytek piezoelektrycznych odpowiednio obudowanych wykonuje się głowice ultradźwiękowe. Zazwy-
czaj ta sama głowica jest jednocześnie źródłem i odbiornikiem fal. Jeżeli głowicę pobudzimy krótkim impul-
sem elektrycznym o dużej amplitudzie, to płytka piezoelektryka wykona kilka … kilkanaście drgań o często-
tliwości rezonansowej. Drgania płytki przez oddziaływania sprężyste przeniosą się do badanego ośrodka,
tworząc przemieszczającą się " impulsową " falę ultradźwiękową. Jeśli na drodze fali znajdzie się przeszko-
da ( np. wada materiałowa typu pęknięcie, czyli inaczej mówiąc fala trafi na granicę ośrodków o znacznie
różnych impedancjach akustycznych ) , to pewna część energii fali wróci do głowicy w postaci fali odbitej.
Fala odbita pobudzi do drgań płytkę piezoelektryczną głowicy - powstanie zatem impuls elektryczny, tzw.
impuls echa wady. Przez prosty pomiar czasu
Δt, między impulsem nadawczym a impulsem echa wady,
można wyznaczyć odległość wady od głowicy, gdyż :
c
t
L
⋅
Δ
=
2
gdzie : L - odległość wady, c - prędkość fali .
200V
5 mV
R
T = 0.2 us
impuls
E=300V
impuls nadawczy
L= 500mm
stal
wada materiału
piezoelektryk
15 mV
impuls
echa dna
echa wady
zobrazowanie typu A
tzw. "A-Scan"
Ilustracja zasady wykrywania wad metodą echa przy użyciu jednej głowicy nadawczo- odbiorczej
” Ultradźwięki ” Laboratorium
10
Amplituda impulsu echa wady niesie informację o rozmiarze wady, choć nie jest to zależność prosta i
zależy od wielu czynników - będzie to omawiane później. Należy podkreślić, że amplituda impulsu echa wa-
dy może być kilkaset … kilkadziesiąt tysięcy razy mniejsza od amplitudy impulsu nadawczego. Jeśli na
ekranie lampy oscyloskopowej zobrazujemy sygnał elektryczny przetwornika to mamy pewną umowną gra-
ficzną interpretację zjawisk w ośrodku – tzw. A – Scan . Przyrząd elektroniczny służący do pobudzania prze-
twornika oraz obrazowania impulsów na ekranie nazywamy impulsowym defektoskopem ultradźwiękowym.
Omówiony sposób wykrywania wad ilustruje rysunek powyżej.
4. POLE ULTRADŹWIĘKOWE
Fale ultradźwiękowe, jak każde fale, są zjawiskiem czasoprzestrzennym. Obszar w którym rozchodzą
się fale ultradźwiękowe nazywamy polem ultradźwiękowym . Kształt i wymiary pola ultradźwiękowego za-
leżą od wymiarów źródła ( przetwornika ) i częstotliwości fali.
N
Pole bliskie
(fala płaska)
Pole dalekie
(fala kulista)
2
szerokość
wiązki
ϕ
Szkic pola ultradźwiękowego dla przetwornika kołowego
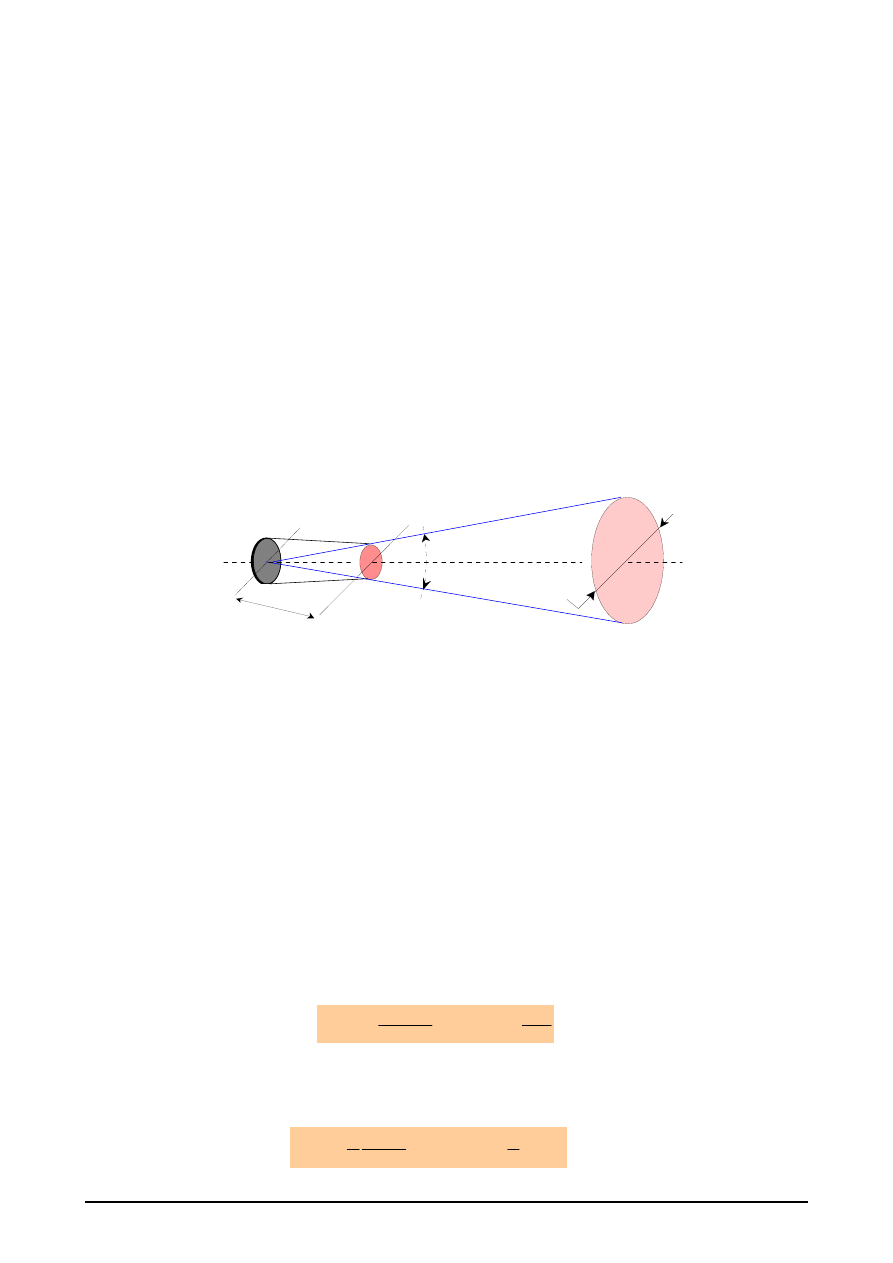
Rozważmy kołowy przetwornik o drganiach grubościowych. Każdy punkt drgającej powierzchni prze-
twornika możemy traktować jako źródło nowej fali kulistej ( zasada Huygens'a ) . Czoło powstałej fali stanowi
obwiednię wszystkich fal kulistych - będzie zatem równoległe do powierzchni przetwornika ( fala płaska ).
Ciśnienia poszczególnych fal kulistych mogą się w różnych punktach pola dodawać lub odejmować. W kon-
sekwencji powstają lokalne minima i maksima ciśnienia. Pole ultradźwiękowe można opisać rozkładem ci-
śnienia akustycznego fali ultradźwiękowej w przestrzeni. Przyjmuje się, że dla odległości l < N w tzw. polu
bliskim przetwornika ( gdzie N jest długością pola bliskiego ) występuje fala płaska, zaś dla odległości l >
3N , w tzw. polu dalekim - fala kulista. W polu bliskim wiązka ma lekką zbieżność, natomiast w polu dalekim
tworzy stożek z wierzchołkiem w środku źródła. W rzeczywistości podział na pole bliskie i dalekie nie jest
ostry i występuje pewna strefa przejściowa, w której nie można przyjąć czystego modelu fali płaskiej lub kuli-
stej. Zależność na długość pola bliskiego jest następująca:
λ
λ
λ
λ
⋅
=
⎯
⎯ →
⎯
=
⋅
−
=
=
〉〉
4
4
2
2
2
0
D
D
N
l
D
W polu dalekim, ciśnienie akustyczne we współrzędnych biegunowych można wyrazić następująco :
ϕ
λ
π
α
π
sin
)
(
1
2
0
0
D
x
x
x
J
P
P
r
e
r
l
=
=
−
” Ultradźwięki ” Laboratorium
11
gdzie : r - odległość od przetwornika,
ϕ - kąt odchylenia od osi wiązki, α - współczynnik tłumienia fal, J1(x) -
funkcja Bessela pierwszego rzędu.
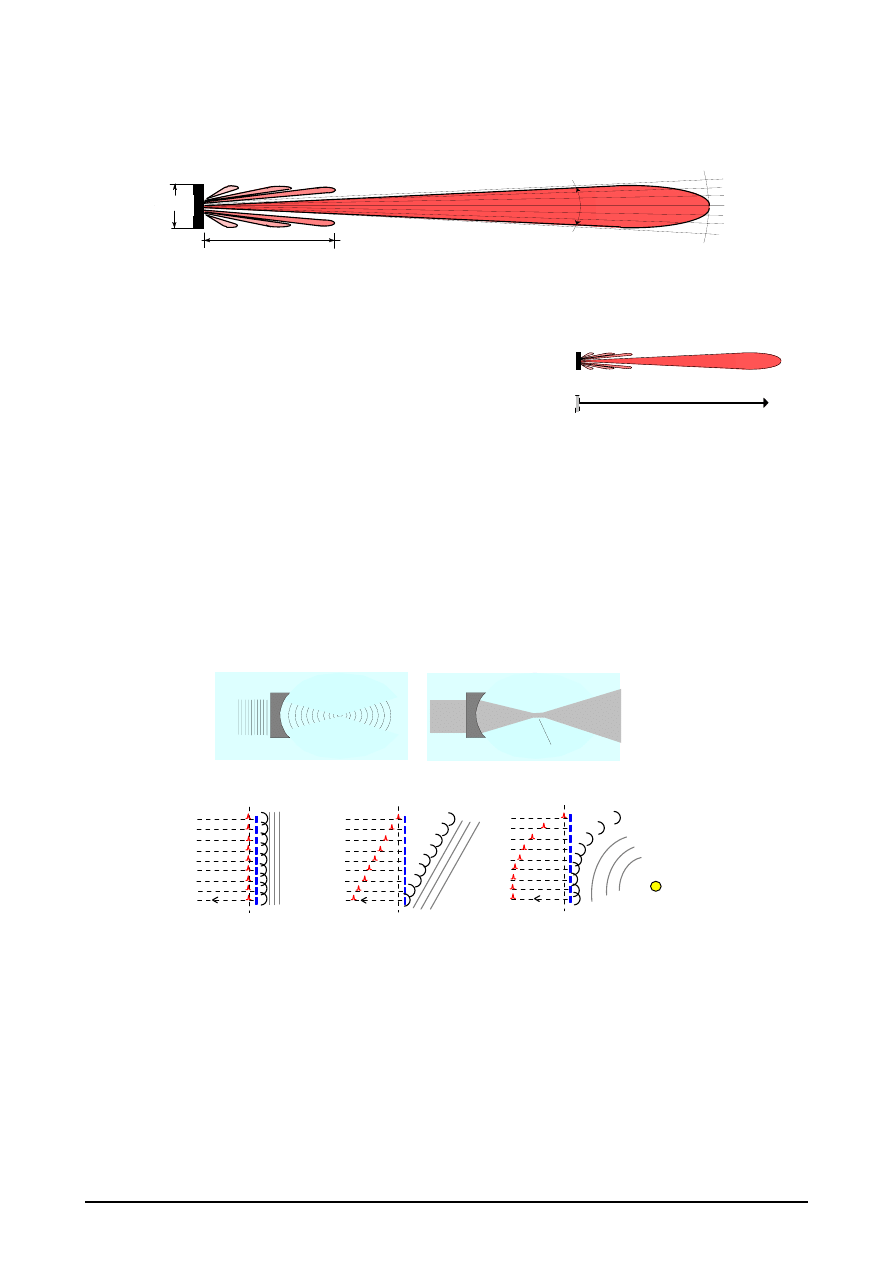
2 ϕ
0
2
4
6
2
4
6
l
0
Φ
= D
°
°
°
°
°
°
°
Obliczona charakterystyka kierunkowa przetwornika kołowego w polu dalekim
Często na różnych ilustracjach rysujemy falę ultradźwiękową
symbolicznie jako wektor ( fala padająca, fala odbita ... ) . Należy
mieć jednak świadomość, że fala nie rozchodzi się jako pojedynczy
promień tylko jako tzw. wiązka fal.
symboliczne zobrazowanie
wiązki fal ultradźwiękowych
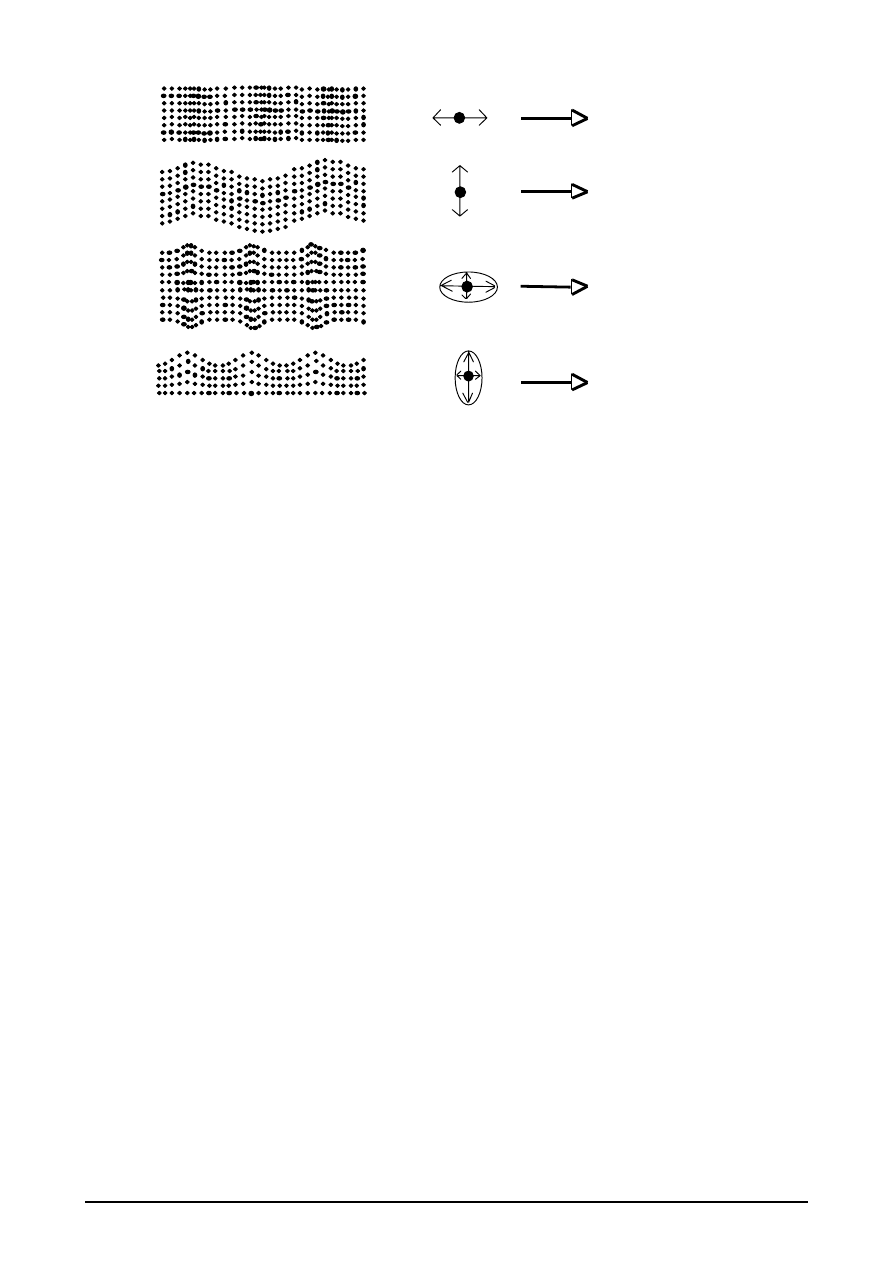
4.1 OGNISKOWANIE WIĄZKI FAL ULTRADŹWIĘKOWYCH
Wykorzystując zjawisko załamania fali, przy padaniu pod kątem na granicę ośrodków, można zogni-
skować wiązkę fal ultradźwiękowych osiągając znaczne natężenia w okolicy ogniska. Używa się do tego
specjalnie wyprofilowanych ” soczewek ultradźwiękowych ” . Ognisko jest w stałej odległości od soczewki i
leży w osi wiązki fali padającej - przypadek
A
na rysunku.
t = 0
czas
czoło fali
płaskiej
t = 0
czoło fali
płaskiej
czas
ognisko
czas
t = 0
czoło fali
kulistej
B
C
D
woda
woda
ognisko
A
Nowoczesne metody profilowania i ogniskowania wiązki fali ultradźwiękowej polegają na wykorzystaniu
kilkudziesięciu ... kilkuset miniaturowych przetworników ultradźwiękowych ułożonych w strukturę liniową (
tzw. głowice mozaikowe liniowe ) albo strukturę płaską ( głowice mozaikowe 2D ). Głowica mozaikowa wy-
maga bardzo złożonej aparatury elektronicznej do jej obsługi. Jeśli wszystkie elementy mozaiki pobudzone
są impulsami nadawczymi jednocześnie ( przypadek
B
na rysunku wyżej ) , to wypadkowe czoło fali ultra-
dźwiękowej jest płaskie i emitowana wiązka fali jest prostopadła do płaszczyzny mozaiki. Gdy elementy mo-
zaiki pobudzimy tak jak w przypadku
C
, najpierw górne zewnętrzne i stopniowo opóźniane w kierunku dol-
nym, to wypadkowe czoło pozostanie płaskie ale zmieni się kierunek fali. Kształt czoła fali można modelo-
” Ultradźwięki ” Laboratorium
12
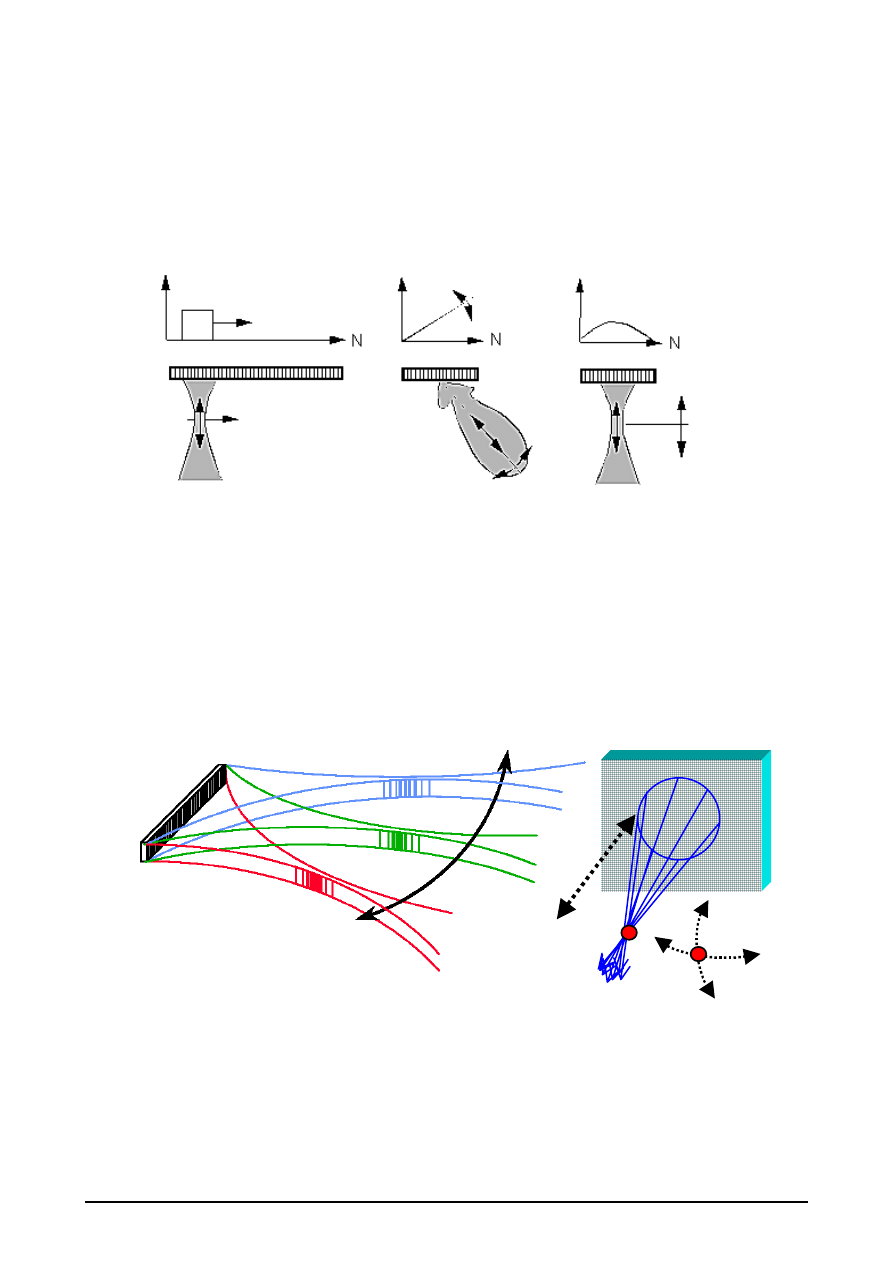
wać manipulując opóźnieniami pobudzenia poszczególnych elementów mozaiki. Można zatem, jak np. w
przypadku
D
, spowodować zogniskowanie wiązki w pewnym punkcie przestrzeni. Rysunek poniżej ilustruje
sposoby manipulacji wiązką fali z głowicy mozaikowej. Dla mozaiki liniowej odchylanie wiązki możliwe jest
tylko w jednej płaszczyźnie a dla mozaiki 2D w dowolnym kierunku. Daje to wspaniałą możliwość przemiata-
nia wiązką fal ultradźwiękowych w przestrzeni ( tzw. Skanowania ) przy nieruchomej głowicy mozaikowej.
Jest to szeroko wykorzystywane zwłaszcza w diagnostyce medycznej ( ultrasonografia ) przy badaniu na-
rządów wewnętrznych człowieka.
pobudzenie
opóźnienie
opóźnienie
przesuwanie
wiązki
odchylanie
wiązki
zmiana
wiązki
równoległe
kątowe
ogniska
Każdy element mozaiki zarówno wytwarza jak i odbiera fale ultradźwiękowe. Jeśli sygnały odebrane
przez poszczególne elementy mozaiki odpowiednio opóźnimy, o czas taki sam jak opóźnienie przy pobu-
dzeniu, a następnie zsumujemy to otrzymamy wypadkowy sygnał elektryczny będzie największy od fal odbi-
tych w okolicy ogniska i znacząco mniejszy od fal odbitych poza ogniskiem.
Mozaika liniowa
Mozaika 2D
” Ultradźwięki ” Laboratorium
13
5. TŁUMIENIE FAL ULTRADŹWIĘKOWYCH
Ciśnienie fali ultradźwiękowej rozchodzącej się w ośrodku maleje ze wzrostem przebytej drogi. Przy-
czyny tego spadku są następujące:
− rozbieżność wiązki fal ;
− procesy
pochłaniania energii ( tarcie wewnętrzne- energia drgań zamienia się na ciepło ) ;
− procesy rozpraszania tzn. odbicia, załamania i dyfrakcja fal na granicach ziaren krystalicznych, wtrące-
niach i porach ośrodka.
Tłumienie fali to spadek ciśnienia fali na skutek procesów pochłaniania i rozpraszania.
Osłabienie fali to spadek ciśnienia fali uwzględniający tłumienie i rozbieżność wiązki.
Rozpatrzmy problem tłumienia. W cienkiej warstwie ośrodka o grubości dl w odległości l od początku,
przy stałym tłumieniu
α na jednostkę długości występuje względny spadek ciśnienia akustycznego :
dl
P
dP
α
−
=
po scałkowaniu otrzymujemy
P
P e
x
l
=
⋅
−
0
α
gdzie : P0 - ciśnienie początkowe, l - odległość od początku, α - współczynnik tłumienia.
Tłumienie fal ultradźwiękowych rośnie z częstotliwością fali i wielkością ziaren ośrodka. W tabeli poda-
no współczynniki tłumienia
α dla kilku ośrodków ( dla fal podłużnych, przy f =1MHz ) .
Ośrodek
α [dB/mm]
Ośrodek
α [dB/mm]
Stal
5
⋅10-3...5⋅10-2
Szkło okienne
3.2
⋅10-3
Aluminium
5
⋅10-4...2⋅10-2
PMM („pleksiglas”)
2.5
⋅10-1
Magnez
3
⋅10-4...3⋅10-3
Polistyren
1.7
⋅10-1
Miedź
1
⋅10-2...5⋅10-2
Woda
2.5
⋅10-4
Kwarc topiony
0.6
⋅10-3
Gliceryna
6
⋅10-2
Szkło kryszt.
1
⋅10-3
Powietrze
1.6
⋅10-1
” Ultradźwięki ” Laboratorium
14
6. SPRZĘT DO BADAŃ ULTRADŹWIĘKOWYCH
6.1 GŁOWICE ULTRADŹWIĘKOWE
Głowicę ultradźwiękową stanowi odpowiednio zabudowany i dostrojony elektrycznie przetwornik piezo-
elektryczny. Głowica normalna składa się z następujących elementów : obudowy spełniającej rolę uchwytu i
konstrukcji nośnej, przetwornika piezoelektrycznego, osłony chroniącej przetwornik przed uszkodzeniem
mechanicznym, masy tłumiącej która tłumi drgania własne przetwornika, układu dopasowania elektrycznego
(cewki), gniazda do podłączenia kabla . W głowicach skośnych przetwornik przyklejony jest do klina z plek-
siglasu. Na granicy ośrodków ( klin - obszar badany, np. : stal ) następuje zjawisko transformacji fali podłuż-
nej na poprzeczną. Głównymi parametrami głowic są : częstotliwość drgań, rodzaj wzbudzanych fal, kąt za-
łamania wiązki fal, wymiary przetwornika. Nazwa „normalna” – informuje że fale wprowadzane są w kierunku
prostej normalnej (czyli prostopadłej) do płaszczyzny przyłożenia głowicy.
klin z pleksi
przetwornika
masa tłumiąca
____
___
sin α
β
sin
=
V1
V2
osłona
płytka
piezo-
masa
tłumiąca
gniazdo
obudowa
dopasowanie
elektryczne
elektryka
Głowica normalna
Głowica skośna
V
2
α
V
1
β
Przykład oznaczenia głowicy normalnej ( polski producent INCO
) głowica 4L0
°10C : 4 – częst. w [ MHz] , L - fale podłużne , 0° - kąt
wprowadzania fali, 10 - średnica przetwornika w [ mm ] , C - rodzaj
przetwornika ( ceramiczny ) .
Przykład oznaczenia głowicy skośnej ( prod. INCO ) głowica 2T
70
°10x10 : 2 – częstotliwość w [ MHz ], T - fala poprzeczna, 70° - kąt
załamania fali w stali, 10x10 - wymiary przetwornika w [ mm ].
Na zdjęciu pokazano przykłady głowic normalnych i skośnych,
do badań kontaktowych, firmy Krautkramer.
6.2 DEFEKTOSKOPY ULTRADŹWIĘKOWE
Defektoskopy współpracują z głowicami ultradźwiękowymi. Charakterystyczną cechą defektoskopu im-
pulsowego jest krótkie pobudzanie głowicy , która emituje do badanego ośrodka " impulsową " falę ultradź-
więkową - oraz odbiór i zobrazowanie impulsów z głowicy, powstałych w wyniku fal odbitych powracających
do głowicy. Każdy defektoskop impulsowy posiada zatem: nadajnik impulsów, odbiornik impulsów i układ
zobrazowania.
W zależności od konstrukcji układu zobrazowania defektoskopy impulsowe dzielimy na :
” Ultradźwięki ” Laboratorium
15
−
defektoskopy analogowe - sygnał z odbiornika zobrazowany jest w postaci wykresu " napięcie-czas " na
ekranie lampy oscyloskopowej ;
−
defektoskopy analogowo-cyfrowe ( lub z przetwarzaniem cyfrowym ) - sygnał z odbiornika jest przetwa-
rzany na ciąg liczb ( '’ próbek " ) wpisywanych do pamięci komputera, a następnie przy wykorzystaniu
odpowiedniego oprogramowania, wyświetlany w formie wykresu " napięcie-czas " na ekranie monitora.
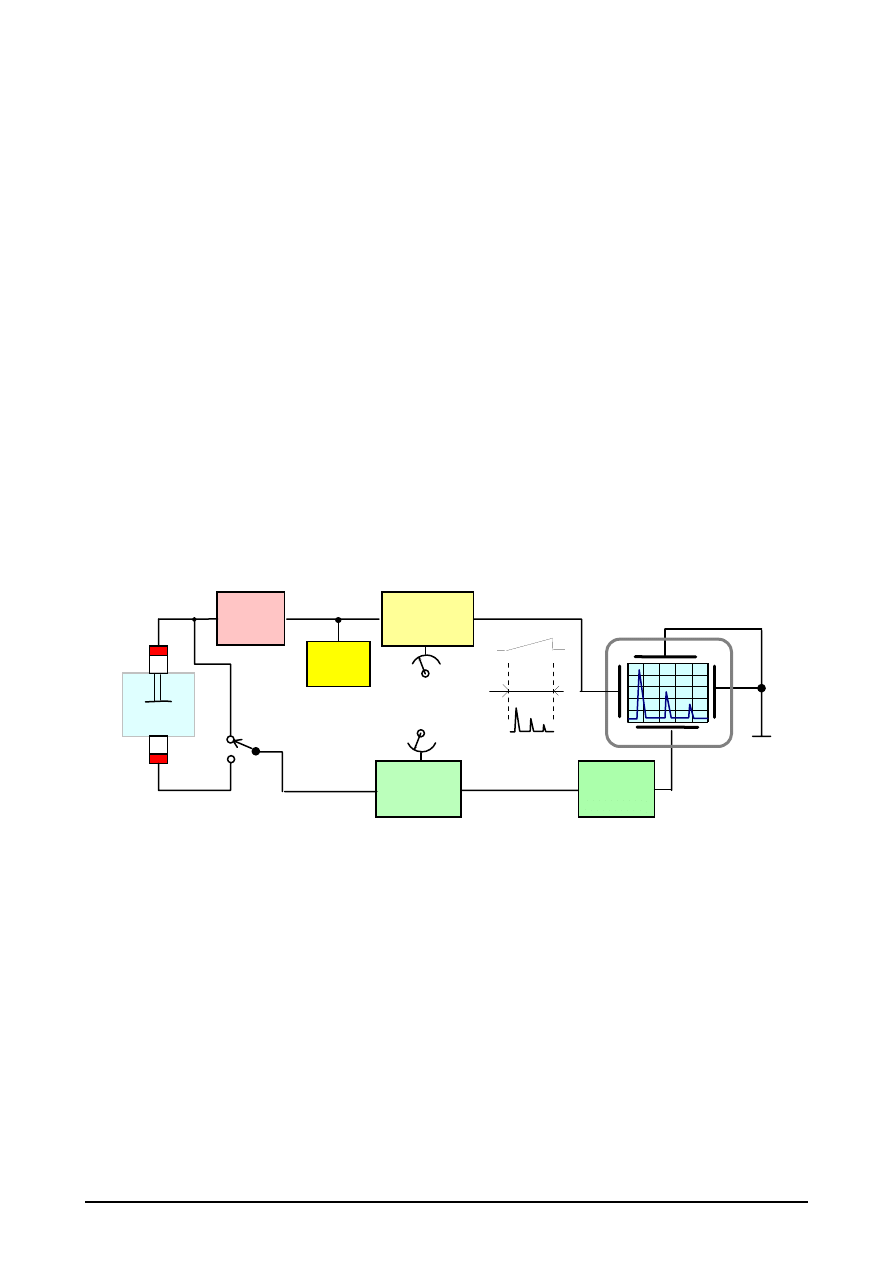
6.2.1 Defektoskop analogowy
Aby obraz na ekranie lampy oscyloskopowej był wyraźny ( nie migający ) i dostatecznie jaskrawy to
plamka musi odwzorowywać sygnał cyklicznie, kilkadziesiąt razy - kilka tysięcy razy na sekundę. Praca de-
fektoskopu polega na powtarzaniu pewnego cyklu. Okres tego cyklu wyznacza generator impulsów syn-
chronizujących. Każdy impuls tego generatora uruchamia generator podstawy czasu i wyzwala nadajnik.
Nadajnik pobudza silnym i krótkim impulsem elektrycznym głowicę nadawczą do drgań. Jeżeli używamy
jednej głowicy nadawczo - odbiorczej to wejście odbiornika jest połączone z wyjściem nadajnika, natomiast
przy pracy z dwoma głowicami - odbiornik wzmacnia sygnały tylko z głowicy odbiorczej.
Ruch plamki na ekranie lampy jest efektem złożenia dwóch ruchów składowych :
−
jednostajnego ruchu w kierunku X - wynikającego z liniowo narastającego w czasie napięcia Ux ;
− ruchu w kierunku Y - przesunięcie jest plamki proporcjonalne do chwilowej wartości wzmocnionego w
odbiorniku sygnału U
Y
z głowicy .
Gen.
synchr
Nadajnik
Odbiornik
GO
GN
Generator
podstawy
czasu
P1
U
x
"WZMOCNIENIE"
"ZASIĘG"
+
detektor)
U
Y
Y
Y
X
X
Głowica
nadawcza
Głowica odbiorcza
"N/O"
"N+O"
μ
0-200
0-200 V
V..2V
Wzm. Y
0-2 V
(x 100)
wejście
wyjście
(wzmacniacz
0-200 V
T
x
Schemat blokowy defektoskopu analogowego
W ten sposób powstaje na ekranie lampy wykres we współrzędnych : " napięcie - czas ". W lampach
oscyloskopowych do pełnego odchylenia plamki w kierunku X lub kierunku Y potrzebne są napięcia rzędu
100 V ... 200 V. Impulsy elektryczne powstające w głowicy od odebranych fal ultradźwiękowych zawierają
się w przedziale kilkudziesięciu
μV … kilku V ( w zależności od rozmiaru wady, odległości od głowicy, usytu-
owania względem wiązki itd ) . Tak duża rozpiętość amplitud sygnału powoduje konieczność regulacji
wzmocnienia odbiornika w szerokim zakresie ( 1 ... kilkanaście tysięcy razy ) .
Wzmacniacz odbiornika jest zawsze wyposażony w skokowy przełącznik " WZMOCNIENIE " wyskalo-
wany w dB, który umożliwia ustalenie odpowiedniej wysokości echa na ekranie lampy - zarówno dla bardzo
słabych jak i silnych sygnałów z głowicy. Na zdjęciu pokazano przykładowy wygląd defektoskopu analogo-
wego z lampą oscyloskopową.
” Ultradźwięki ” Laboratorium
16

W tym miejscu warto przypomnieć skalę decybelową.
Otóż dla wielkości liczbowych zmieniających się w
szerokim zakresie wygodnie jest przyjąć miarę loga-
rytmiczną.
Np.: wzmocnienie odbiornika :
W
= U
wyj
/ U
wej
natomiast wzmocnienie wyrażone w dB :
W
[dB]
= 20 log ( U
wyj
/ U
wej
)
Zakładając U
wej
= 200
μV a U
wyj
= 2V otrzymujemy :
W = 10 000 , oraz W
[dB]
= 20
∗4 = 80 dB .
Czas trwania liniowo narastającego i napięcia Ux wynika z tzw. zakresu obserwacji. W defektoskopach
analogowych zakres ten wybiera się skokowym przełącznikiem " ZASIĘG " wyskalowanym w jednostkach
odległości [mm] .Przełączając " ZASIĘG " układ generatora podstawy czasu odpowiednio zmienia czas Tx
6.2.2 Defektoskop z przetwarzaniem cyfrowym
Jak już wspomniano defektoskop z przetwarzaniem cyfrowym różni się od defektoskopu analogowego
układem zobrazowania. Na zdjęciach pokazano przykłady defektoskopów cyfrowych : poniżej defektoskop
USN 58 firmy Krautkramer jako aparat przenośny z własnym ekranem, a dalej defektoskop UMT-17 w formie
zewnętrznej ” przystawki ” do komputera PC.
” Ultradźwięki ” Laboratorium
17
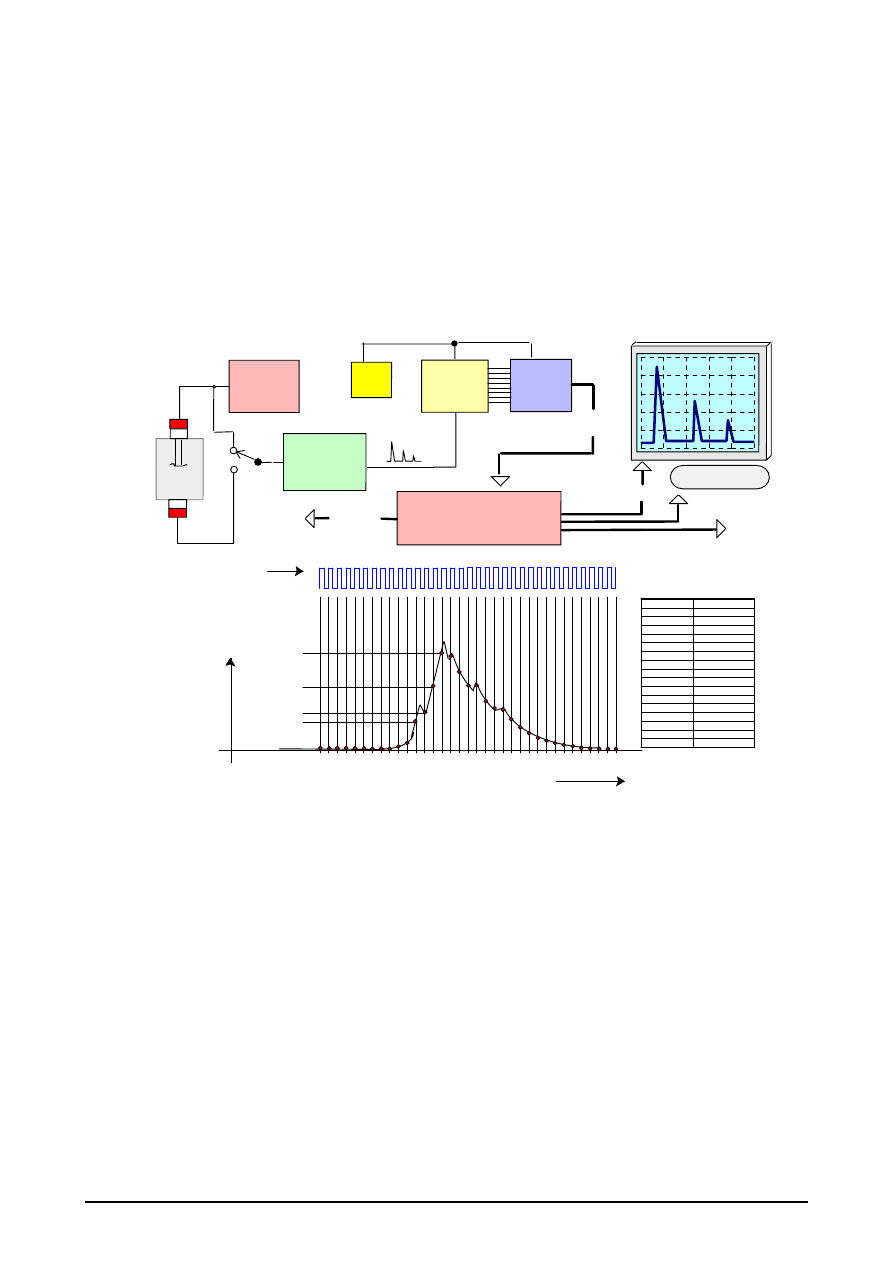
W defektoskopie cyfrowym cykl pracy zaczyna się od wyzwolenia nadajnika i pobudzenia silnym impul-
sem elektrycznym głowicy. Jednocześnie startuje przetwornik analogowo cyfrowy ( A/C ) , taktowany gene-
ratorem zegarowym. Na wejście przetwornika A/C podawany jest sygnał analogowy z odbiornika. Przetwor-
nik A/C, dla każdego dodatniego zbocza sygnału zegarowego, zamienia chwilową wartość napięcia wej-
ściowego na liczbę - ( tzw. " próbkę " ), którą wprowadza się do bufora próbek. Jeżeli impulsy zegarowe
przychodzą w krótkich odstępach czasu ( wysoka częstotliwość próbkowania ) to sygnał analogowy jest do-
statecznie wiernie określony przez ciąg próbek. Po zapełnieniu bufora próbek jego zawartość jest przesyła-
na do pamięci operacyjnej mikrokomputera, a następnie przy pomocy oprogramowania wyświetlona na
ekranie graficznym w postaci wykresu " napięcie- czas ".
Nadajnik.
O
N
Próbki
Gen.
zeg.
A/C
Przetw.
Bufor
próbek
Odbiornik
"N/O"
"N+O"
Peryferia
Klawiatura
Ekran
Obraz
MIKROKOMPUTER
1 2 3 .........12..15........................
62
149
221
85
Sygnał
zegarowy
Czas ( numer kolejny próbki)
Napięcie
(wartość
Numer
Wartość
Fragment
---
---
---
---
---
---
7
8
9
10
11
12
13
14
15
16
17
18
19
---
---
(czas)
0
0
0
4
12
62
85
149
221
208
185
150
152
probki próbki
(napięcie)
bufora próbek
próbki)
Stero-
wanie
Schemat blokowy defektoskopu z przetwarzaniem cyfrowym
Istotną zaletą defektoskopu z przetwarzaniem cyfrowym jest to, że wiele czynności można zrealizować
dzięki pracy w środowisku komputerowym, np.: zamrożenie/odmrożenie wykresu, automatyczne pomiary
amplitudy i odległości ech, zapis/odczyt obrazu na dysku, drukowanie itd. Zgromadzone w pamięci kompute-
ra dane pozwalają na zawansowane metody przetwarzania i prezentacji wyników, np : analizę widmową sy-
gnału, filtrację cyfrową, uśrednianie, korelacyjne metody pomiaru czasu przejścia itp.
” Ultradźwięki ” Laboratorium
18
Ekran programu dla defektoskopu z przetwarzaniem cyfrowym typ UMT-17
6.3. POMIARY AMPLITUDY I CZASU W DEFEKTOSKOPACH CYFROWYCH
W pomiarach defektoskopami impulsowymi podstawowe informacje zawarte są w: amplitudzie impulsu,
czasie przejścia fali, kształcie obwiedni ( rzadziej : faza sygnału, widmo ) - wydobywane z typowego A - Sca-
nu. Stąd sposoby ( algorytmy ) określania amplitudy impulsu oraz jego położenia na osi czasu są tak istotne.
Zazwyczaj interesuje nas pewien wyróżniony obszar czasu ( odległości ) określony tzw. bramką czasową i
odwzorowany graficznie na ekranie ( czasem spotyka się określenia bramki terminem ” monitor ” ) .
6.3.1. Pomiary amplitudy
Amplitudę impulsu ( wysokość echa ) przyjęto w defektoskopach wyrażać w formatach :
− procentowo,
jako % wysokości ekranu ( %H ) albo różnicę % względem progu monitora ;
− względnie w dB jako różnicę między : wysokością ekranu, progiem monitora, albo innego echa ;
− bezwzględnie w V jako amplitudę na wyjściu wzmacniacza defektoskopu.
Wyznaczenie amplitudy impulsu w obszarze bramki można sprowadzić do programowego bądź sprzę-
towego przeszukania bufora próbek i znalezienia największej próbki - a następnie wyrażenia wartości tej
próbki w jednym z w/w formatów.
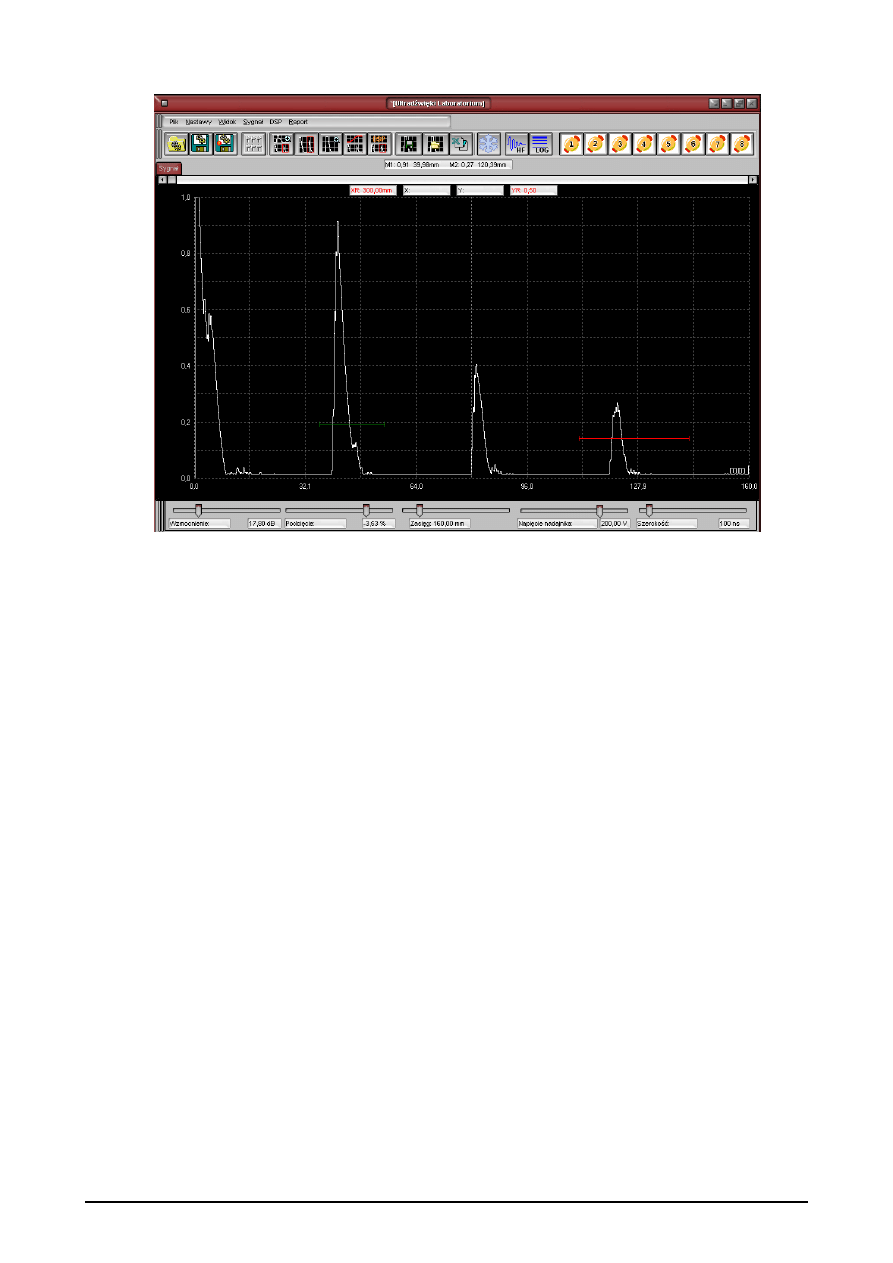
W tym miejscu warto poruszyć zagadnienie błędu jaki można popełnić przy określaniu amplitudy mak-
symalnej.
” Ultradźwięki ” Laboratorium
19
Pamiętamy, że ciąg próbek nie reprezentuje absolutnie wszystkich możliwych wartości chwilowych sy-
gnału rzeczywistego - zatem błąd oszacowania będzie malał gdy rośnie częstotliwość próbkowania. Na ry-
sunku pokazano zależność wielkości błędu
δ [%] od f
p
/f
r
( gdzie : f
p
częstotliwości próbkowania, f
r
częstotli-
wość sygnału z głowicy ) – zakładając sinusoidalny kształt szczytu impulsu. Przykładowo, jeśli używamy gło-
wicy o częstotliwości f
r
= 2 MHz , to przy f
p
= 40 MHz błąd określenia amplitudy impulsu będzie rzędu 1% .
29%
7.6%
δ
Tp=1/fp
A
Amax
δ
[%]
fp
fr
3
4 5
8
10
20
30
19%
4.8%
1.2%
0.5%
δ
[%] =
Amax
Amax -A
100%
6.3.2. Pomiary odległości ( czasu przejścia )
Płożenie impulsu w defektoskopach wyraża się jako :
− odległość ” reflektora ” od głowicy w mm - czyli bezpośrednią drogę fali ( termin ” reflektor ” oznacza
obiekt odbijający fale, np. wada materiałowa, ściana obiektu itp. ) ;
−
rzuty drogi fali mm*cos
β , mm*sin β dla głowic skośnych ;
− czas
przejścia fali w
μs ;
− różnicowo ( zarówno czas jak i odległość ) względem ustalonej wstępnie wielkości.
Odczyt wzrokowy położenia impulsu z ekranu aparatu jest orientacyjny - zatem stosuje się procedury
pomiarowe wykonywane przez mikrokomputer. Odległości są przeliczane z informacji pierwotnej, jaką jest
czas, z uwzględnieniem prędkości fali. W defektoskopach cyfrowych wykorzystuje spróbkowany sygnał ul-
tradźwiękowy do pomiaru czasu. Impulsy mają skończony czas trwania i zmienną w czasie obwiednię. Aby
określić odległość (położenie) impulsu względem wybranej chwili odniesienia to należy wybrać jedno ” cha-
rakterystyczne miejsce ” w impulsie reprezentujące umownie to położenie.
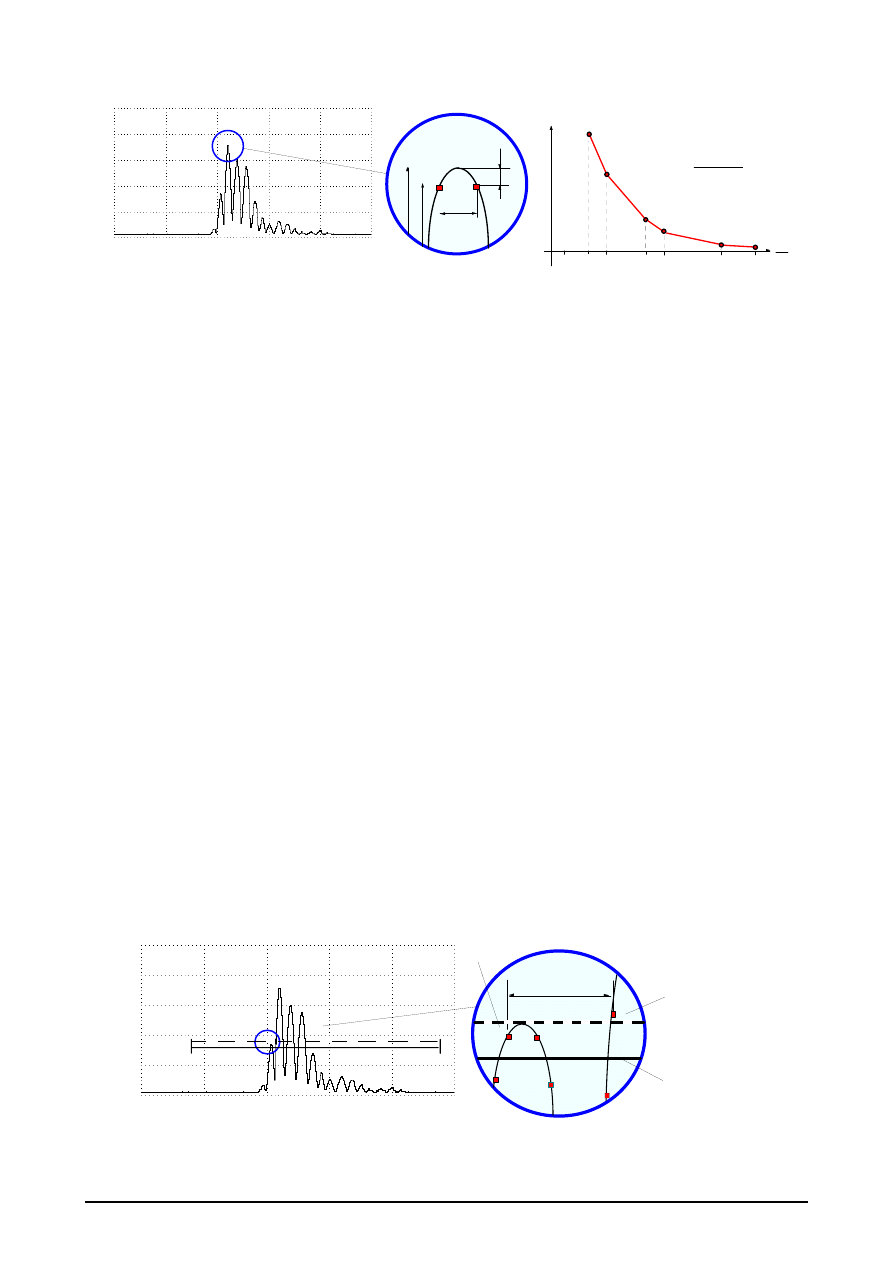
W defektoskopach, dla potrzeb określania położenia wykrytych wad, najbardziej rozpowszechniony jest
tzw. progowy pomiar czasu. Algorytm jest trywialny - mikrokomputer szuka w obszarze monitora pierwszej
próbki N
x
przekraczającej próg monitora .
δ
próbka Nx
bramka
próbka Nx'
Progowy pomiar czasu
” Ultradźwięki ” Laboratorium
20
Rozdzielczość pomiaru jest równa okresowi próbkowania ( czas między kolejnymi próbkami ). Przy sta-
łej wysokości progu, wynik pomiaru nieznacznie zależy od zmiennej wysokości impulsu ze zmianą wzmoc-
nienia. Ponadto, jeśli próg jest w okolicy lokalnego maksimum to fluktuacje szumowe sygnału wprowadzają
dodatkowe błędy niejednoznaczności ( przyjęcie N
x
albo N
x
’ do obliczeń ) . Ten błąd jest rzędu połowy albo
jednego okresu drgań rezonansowych głowicy, zatem w typowych warunkach może osiągać kilkaset ns – co
dyskwalifikuje tę metodę w dokładnych pomiarach.
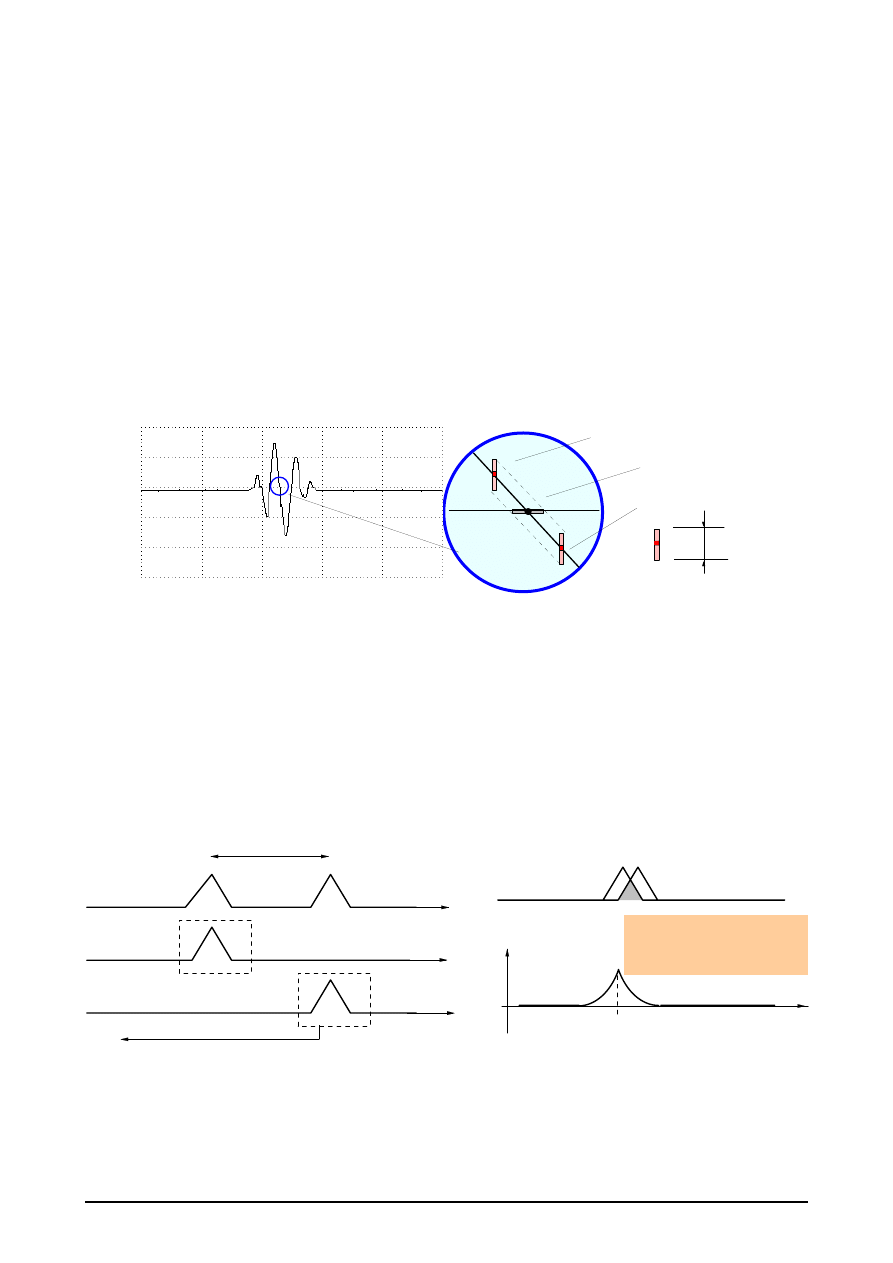
Dobrą metodą jest metoda tzw. ” przejścia przez zero ” ( ang. ” zero-crossing ” ) - w wydaniu cyfro-
wym można ją rozszerzyć o interpolację i uśrednianie, osiągając powtarzalność wyników rzędu ułamka na-
nosekundy. Idea metody sprowadza się do przyjęcia wspomnianego ” charakterystycznego miejsca ” w im-
pulsie jako momentu przejścia przez zero sygnału z głowicy i określenie tego momentu poprzez interpolację
sąsiednich próbek. Metoda ta eliminuje zależność od amplitudy impulsu i jest nieczuła na kształt obwiedni.
Wadą metody jest konieczność wstępnego wskazania obszaru, które przejście przez zero ma być brane pod
uwagę - gdyż w impulsie jest kilka przejść przez zero.
próbka Nx
próbka Nx +1
położenie interpolowane
rozrzut szumowy
Idea metody ” przejścia przez zero ”
Kolejną metodą pomiaru czasu jest metoda korelacyjna, bazująca na silnej zmienności obwiedni im-
pulsu z głowicy ultradźwiękowej. Metodę tę można stosować tylko do pomiarów różnicowych czasu między
dwoma impulsami, daje również bardzo dobrą powtarzalność wyników rzędu 1ns . Bardzo cenną zaletą tej
metody jest fakt, że wystarczy tylko zgrubnie wskazać obszary występowania impulsów między którymi mie-
rzymy czas. Na rysunku poniżej pokazano ideę tej metody dla dwóch impulsów " trójkątnych " odległych w
czasie o
τ0 . Tworzymy dwie funkcje f1(t) oraz f2(t) i obliczamy funkcję korelacji R12. Maksimum funkcji ko-
relacji wypada dla czasu
τ0.
τ
0
f
1 (t)
f
2 (t)
τ
τ
0
R
12
t
t
t
dt
t
f
t
f
R
)
(
)
(
2
0
1
12
τ
−
⋅
=
∫
∞
Wyjaśnienie metody korelacyjnego pomiaru czasu
Jeśli impulsy mają charakter bipolarny, tak jak dla sygnałów bez detekcji w defektoskopie, to funkcja ko-
relacji ma również przebieg bipolarny z jednym wyraźnym ekstremum. Rysunek poniżej ilustruje praktyczny
” Ultradźwięki ” Laboratorium
21
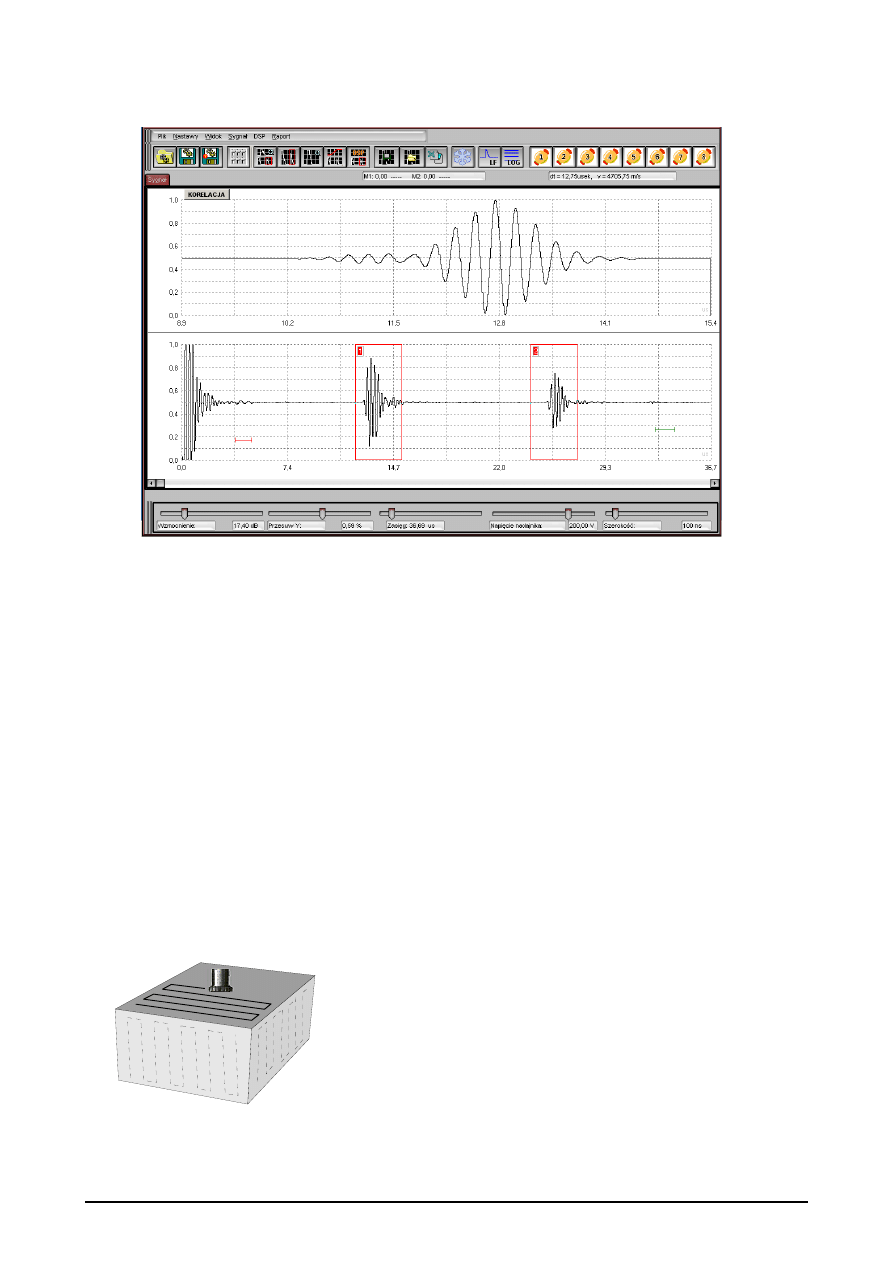
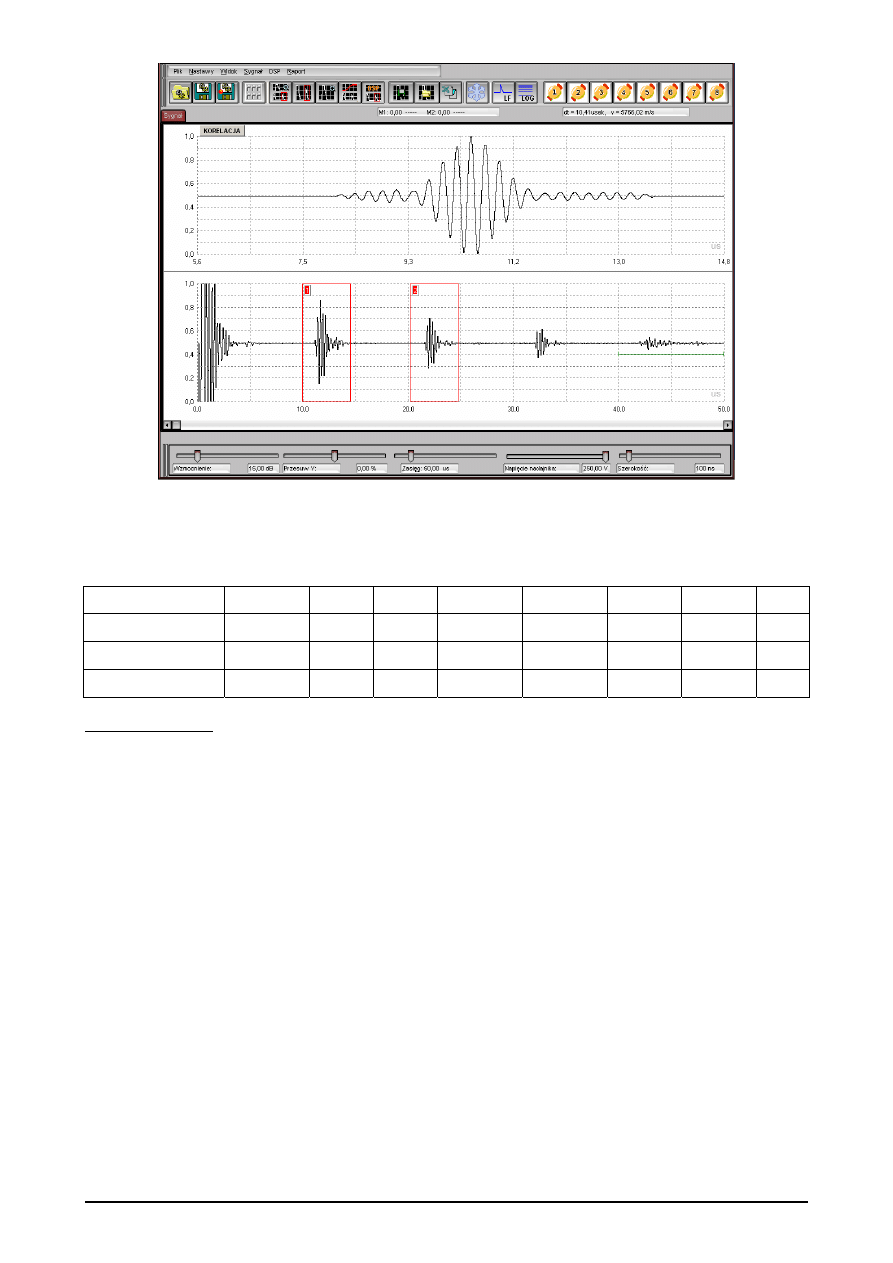
przykład pomiaru metodą korelacji, z wykorzystaniem defektoskopu UMT-17 i standardowego oprogramo-
wania .
Pomiar prędkości fal podłużnych w płasko-równoległej próbce miedzianej o grubości g = 30mm, z
użyciem głowicy 4 MHz.
W ramkach 1 i 2 są dwa kolejne echa dna próbki, w górnym oknie funkcja korelacji sygnałów w
ramkach. Maksimum funkcji korelacji wypada dla czasu dt = 12.75 μs i jest to podane w polu
wyniku. Program automatycznie oblicza prędkość fali przy zadeklarowanej drodze fali, w tym
przypadku V = 2g/dt = 60mm / 12.75 μs = 4705,75 m/s.
7. METODY BADAŃ ULTRADŹWIĘKOWYCH
7.1 KONFIGURACJA GŁOWIC PRZY WYKRYWANIU WAD MATERIAŁOWYCH KONTAKTOWĄ ME-
TODĄ ECHA
Podczas wykrywania wad materiałowych w obiekcie przestrzen-
nym należy spenetrować wiązką fal ultradźwiękowych możliwie całą
objętość i pod różnymi kątami. Głowicę prowadzimy ręcznie po do-
stępnej powierzchni obiektu ruchem meandrowym, jednocześnie ob-
serwując ekran defektoskopu. Zawsze używamy środka sprzęgające-
go ( oleju, smaru, wody ) , którym zwilżamy powierzchnie kontaktu
głowicy. Przy kontakcie ” suchym ” tylko znikoma ilość energii fali ul-
tradźwiękowej wniknie do badanego obiektu. Wadę materiałową roz-
poznajemy jako nieciągłość ośrodka po występowaniu ” echa wady ”
lub po zaniku ” echa dna ” na ekranie defektoskopu. Zadaniem operatora defektoskopu jest określenie poło-
” Ultradźwięki ” Laboratorium
22
żenia wady w przestrzeni ( głębokość, rzut na powierzchnię ) , oszacowanie rozmiaru wady, rozróżnieniu
kształtu wady ( objętościowa czy płaska ) .
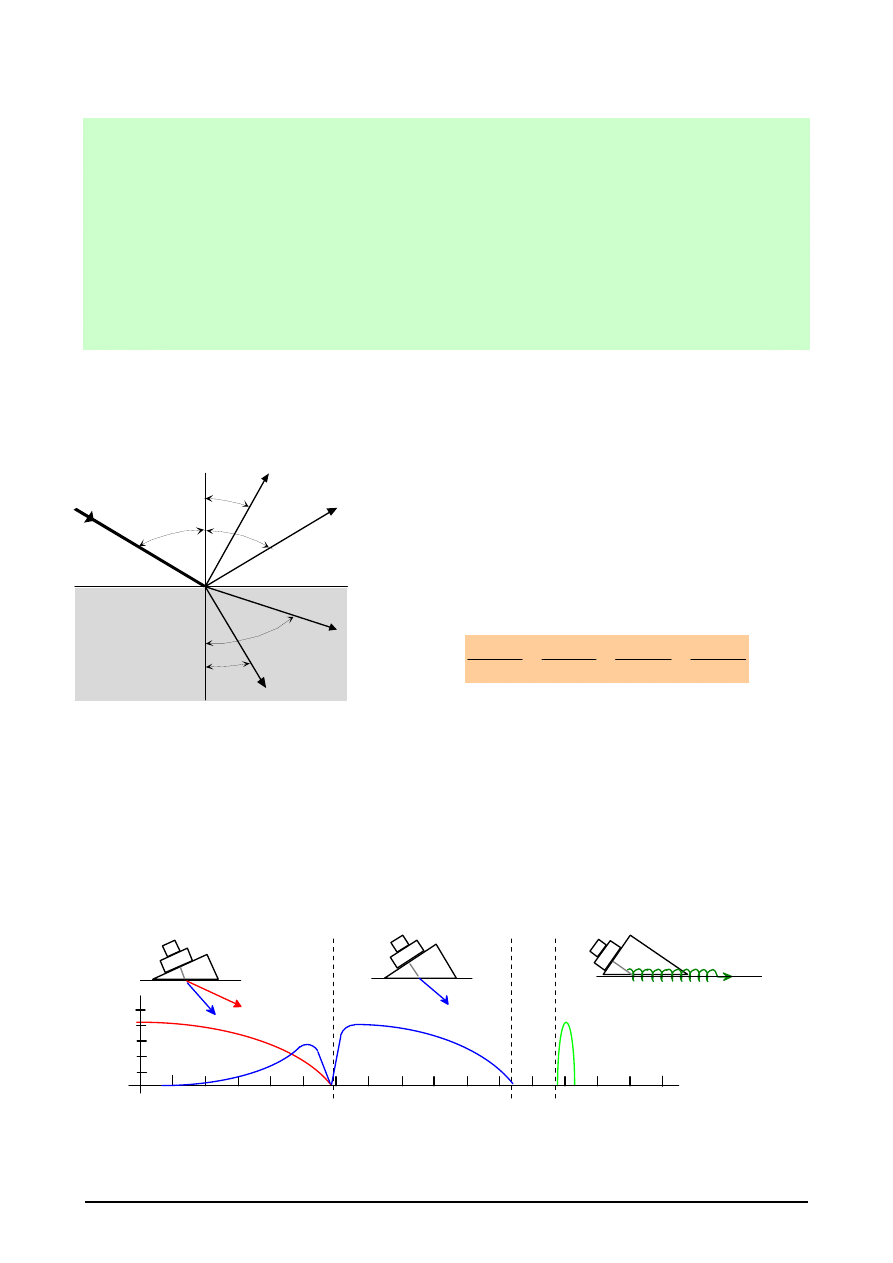
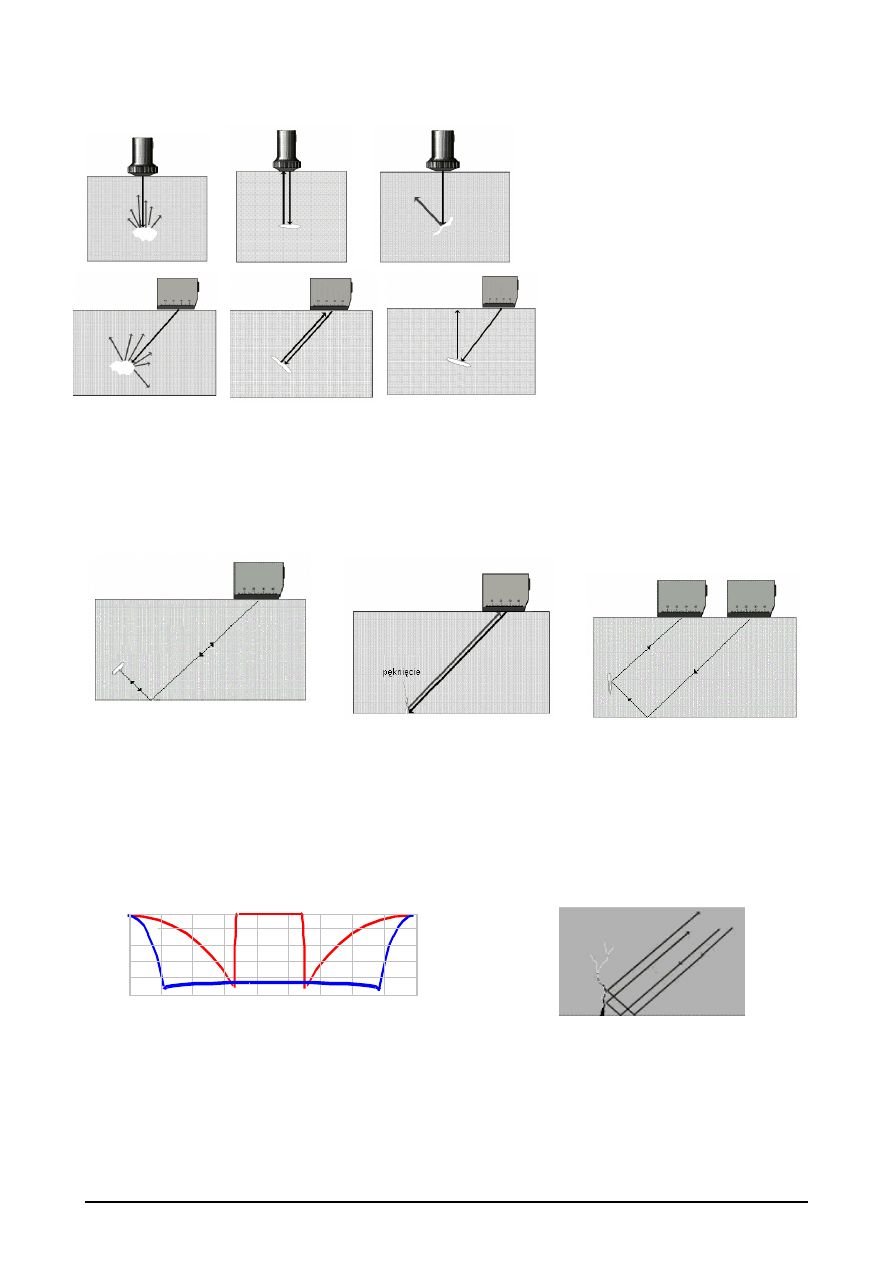
Na rysunku pokazano przykłady
tzw. ” penetracji falą bezpośrednią ”
różnych wad głowicami normalnymi i
skośnymi. Wady objętościowe są w
miarę łatwo wykrywane z każdego
kierunku. Dla wad płaskich wiązka fal
powinna mieć kierunek prostopadły
do powierzchni wady aby odbita fala
powrotna miała szanse dotrzeć do
głowicy. Wady płaskie niekorzystnie
zorientowane mogą być w ogóle nie
wykryte jedną głowicą
Często dostępna jest tylko jedna powierzchnia dla przyłożenia głowicy. Jeśli badany element ma rów-
noległą drugą ścianę ( blacha, rura itp. ) to można wykorzystać odbicie pośrednie dla penetracji obszaru wa-
dy. Dla wad płaskich prostopadłych do powierzchni stosuje się kombinację dwóch głowic skośnych w tzw.
układzie ” tandem ”.
Pęknięcia prostopadłe do powierzchni i jednocześnie wychodzące na powierzchnię tworzą tzw. ” naroże ”
. Fala padająca na naroże, na skutek podwójnego odbicia, wraca zawsze w kierunku równoległym do fali
padającej. Tę cenną właściwość bardzo często wykorzystuje się do wykrywania takich wad. Na rysunku po-
kazano współczynniki ” efektywności ” odbicia fali od naroża :
α
LL
- dla fal podłużnych oraz
α
TT
- dla fal po-
przecznych.
β
10°
20°
30°
40°
50°
60°
70°
80°
90°
0°
- kąt zał amania fali
20%
40%
60%
80%
100%
α
TT
α
LL
Współczynnik taki wyraża stosunek ciśnienia fali odbitej od naroża ( powracającej w kierunku głowicy )
do ciśnienia fali padającej na naroże. Jak widać fala poprzeczna zdecydowanie lepiej odbija się od naroża
niż fala podłużna – a dla kątów z przedziału 34
° .. 56° efektywność odbicia fali poprzecznej jest 100% .
” Ultradźwięki ” Laboratorium
23
7.2 OSZACOWANIE ROZMIARU WADY
7.2.1 Wady większe od przekroju wiązki fali
Jeśli wada płaska jest na tyle duża, że odbija całą skierowaną na nią wiązkę fali to rozległość takiej wa-
dy można określić przez wytyczenie jej konturu. Przyjęte rozumowanie jest następujące :
naprowadzając głowicę nad kra-
niec wady tylko część fali odbije
się od niej. Gdy wada przesłania
połowę przekroju wiązki fali to
echo wady spada do 50 % wy-
sokości – a środek głowicy wy-
znacza jeden z punktów brze-
gowych konturu. Łącząc wiele
punktów brzegowych otrzymu-
jemy figurę, jako rzut wady na
płaszczyznę. Takie rozumowanie
jest poprawne gdy kierunek fali jest prostopadły do płaszczyzny wady. W sytuacjach szczególnych, gdy
obiekt ma równoległą ścianę do płaszczyzny przyłożenia głowicy, kontur dużej wady można określić na pod-
stawie 50 % spadku echa dna – w tym przypadku kształt wady może być dowolny a kontur jest swoistym ”
cieniem ” wady na płaszczyźnie .
β
L
s
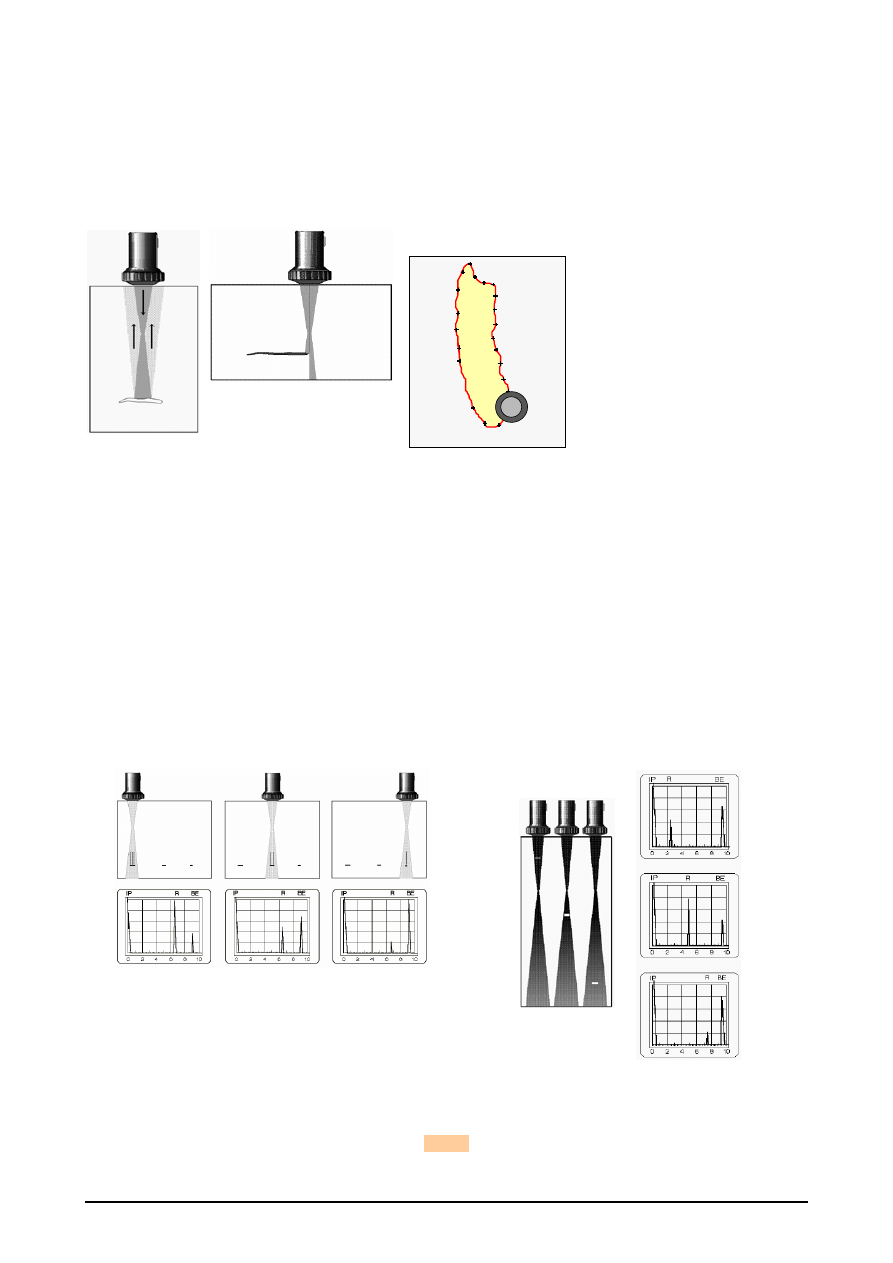
7.2.2 Wady mniejsze od przekroju wiązki fali
Na rysunkach przedstawiono poglądowo wyniki dwóch eksperymentów. W pierwszym obserwowano
zależność wysokości echa od rozmiaru małych płaskich wad, położonych w polu dalekim głowicy i stałej od-
ległości od powierzchni. W drugim eksperymencie obserwowano wysokość echa wady, o ustalonym rozmia-
rze, w zależności od odległości wady.
Wnioski są następujące :
W polu dalekim wysokość echa wady jest proporcjonalna do pola powierzchni wady i odwrotnie propor-
cjonalna do kwadratu odległości wady :
H ~ s
” Ultradźwięki ” Laboratorium
24
H ~ 1/L
2
gdzie : s - pole wady; L - odległość wady.
W polu bliskim zależność na wysokość echa wady jest empiryczna .
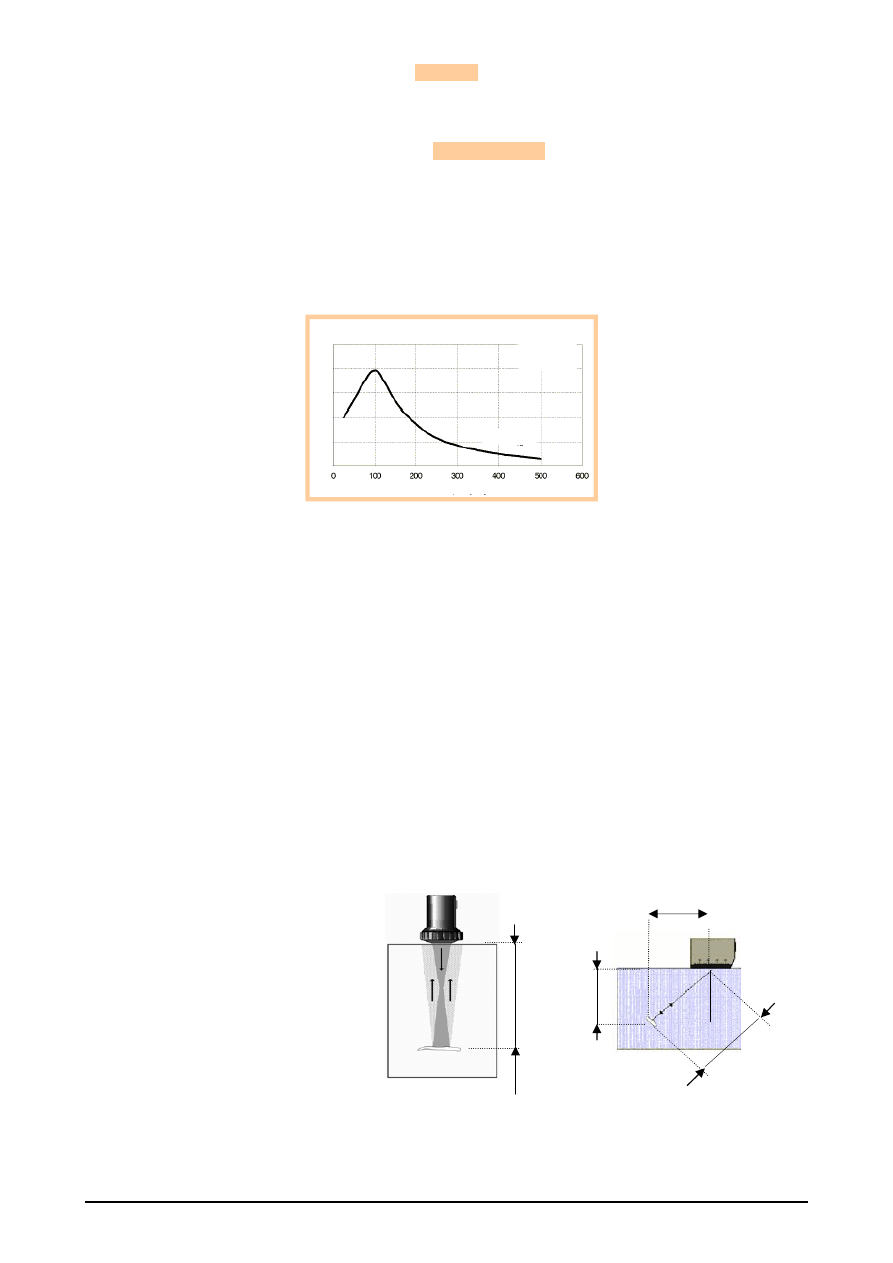
Biorąc pod uwagę te zależności ustalenie rozmiaru wady na podstawie wysokości echa jest kłopotliwe.
W praktyce korzysta się z kilku sposobów :
− wykorzystanie
wykresów
DAC ( ang. Distance Amplitude Curve ) sporządzonych na wadach wzorco-
wych, np. jak na rysunku :
0
20
40
60
80
100
B4S-E
stal
wysokość echa [%]
2mm ERS
odległość [mm]
− wykorzystanie
wykresów
DGS ( ang. Distance Gain Size ) ;
− zastosowanie
sprzętowej dynamicznej ( zmiennej w czasie ) korekcji wzmocnienia defektoskopu TCG
( ang. Time Corrected Gain ) ;
Odpowiednikami angielskich terminów w języku polskim są :
DAC
→ OKA ( krzywa Odległościowej Korekcji Amplitudy ) ;
DGS
→ OWR ( wykres Odległość Wzmocnienie Rozmiar ) ;
TCG
→ ZRW ( Zasięgowa Regulacja Wzmocnienia ) .
7.3 OKREŚLENIE POŁOŻENIA WADY
Położenie wad określamy względem miejsca przyłożenia głowicy, w którym wykryto te wadę. Droga
bezpośrednia fali s jest łatwa do wyzna-
czenia na podstawie położenia impulsu
echa wady na ekranie. Dla głowic nor-
malnych droga bezpośrednia jest głę-
bokością zalegania wady. Dla głowic
skośnych elementarne przeliczenia try-
gonometryczne dają głębokość i rzut na
płaszczyznę odległości wady od ” środ-
ka głowicy ”. W defektoskopach cyfro-
wych przeliczenia wykonywane są
przez wbudowany mikrokomputer.
7.4 BADANIA ZANURZENIOWE
s = ½ c
T
•
t
s
•
sin
β
s
•
cos
β
L
s = ½ c
t
•
L
” Ultradźwięki ” Laboratorium
25
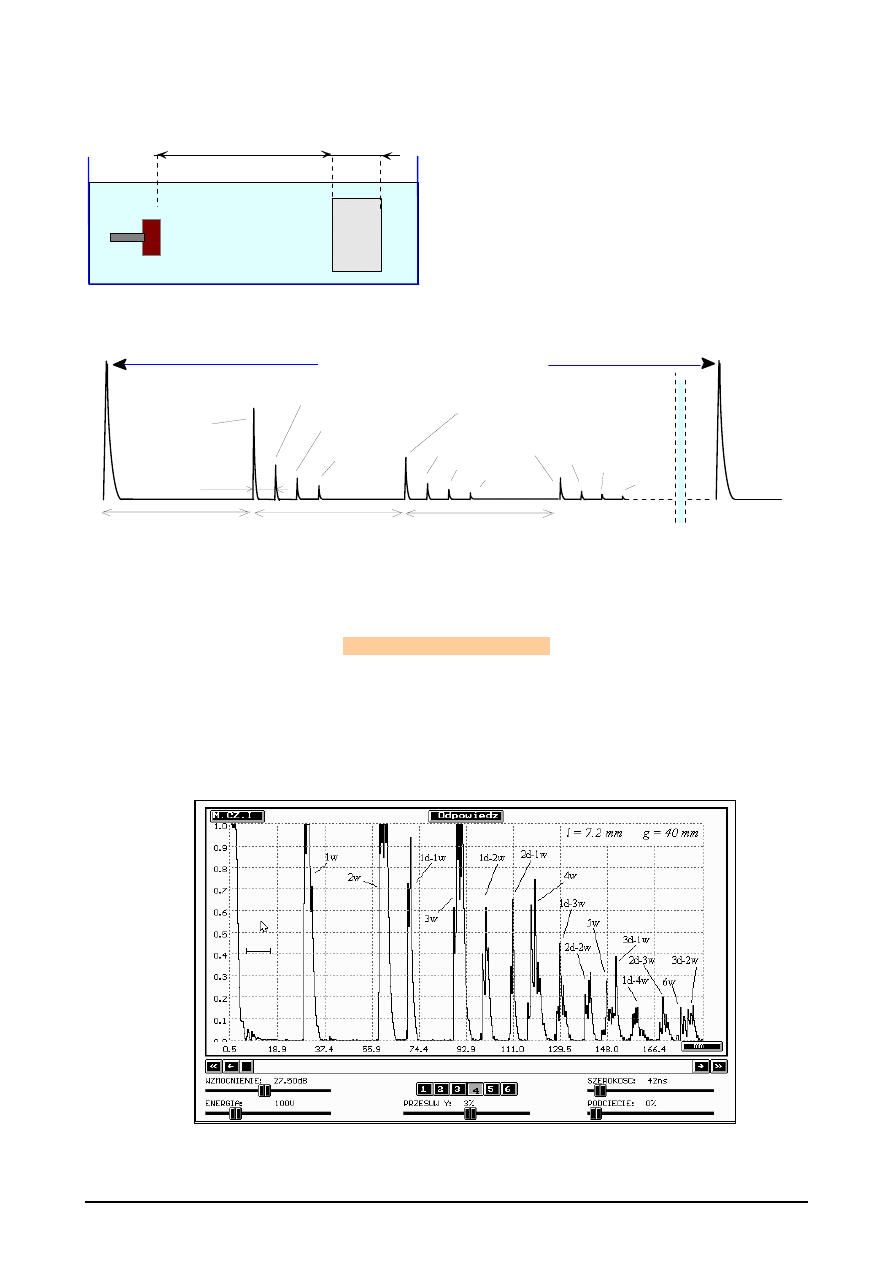
Bardzo popularna jest metoda badań zanurzeniowych,
zwłaszcza w urządzeniach zautomatyzowanych, gdzie
fale z głowicy docierają do badanej próbki przez war-
stwę wody. Po jednym pobudzeniu głowicy ( 1N ) ma-
my kilka ciągów impulsów wynikających z wielokrot-
nych odbić fal w wodzie i próbce co daje złożony obraz
ech na ekranie. Do wykrywania wad należy obserwo-
wać fragment między 1w - 1d1w.
l
g
głowica
próbka
woda
1N-pierwszy
1w- pierwsze
2w - drugie echo wnikania
1d1w- pierwsze echo dna
2N
2d1w- drugie echo dna
3w - trzecie echo wnikania
2t=2l/cw
2t =2 g/c
T- czas wytłumienia fal w wodzie
2t=2l/cw
2t=2l/cw
3d1w
1d2w
2d2w
3d2w
1d3w
2d3w
3d3w
- drugi imp.
nad.
imp. nad.
echo wnikania
W badaniach metodą zanurzeniową należy spełnić warunek na odległość minimalną głowicy od po-
wierzchni stalowej próbki :
lmin > g ∗ ( cw / cs ) ≈ 0.25 g
gdzie : c
w
=1480 m/s, c
s
=5900 m/s – prędkości fal wody i stali.
Obok pokazano przypadek gdy ta zależność nie jest spełniona – kolejne ciągi ech dna są przemieszane
z innymi ciągami ech od wielokrotnych wniknięć fali – całość daje zupełnie nieczytelną sytuację. W bada-
niach ultradźwiękowych podstawową umiejętnością musi być właściwa interpretacja ech.
” Ultradźwięki ” Laboratorium
26
7.5 BADANIA ULTRADŹWIĘKOWE ZE SPRZĘŻENIEM PRZEZ POWIETRZE
Ostatnio zaczęto rozwijać techniki wprowadzania fali ultradźwiękowej do elementów stalowych, kompo-
zytów czy tworzyw sztucznych wprost przez powietrze pod ciśnieniem atmosferycznym. Są to więc badania
” zanurzeniowe w powietrzu ” . Wykorzystuje się fale ultradźwiękowe o częstotliwościach 50 kHz ... 1 MHz .
Sygnały elektryczne otrzymywane z głowic są niezwykle małe, nawet poniżej poziomu szumów własnych
aparatury – stąd konieczność specjalnych zaawansowanych metod przetwarzania sygnałów. Dla zwiększe-
nia energii fali w wybranym obszarze stosuje się silne ogniskowanie wiązki. Zaleta takiego typu sprzężenia
jest oczywista - brak kontaktu mechanicznego głowicy z badanym obiektem.
8. ZASTOSOWANIE FAL ULTRADŹWIĘKOWYCH
Fale ultradźwiękowe znajdują zastosowanie w wielu dziedzinach techniki. W tym rozdziale zasygnali-
zowane zostaną typowe przykłady zastosowań :
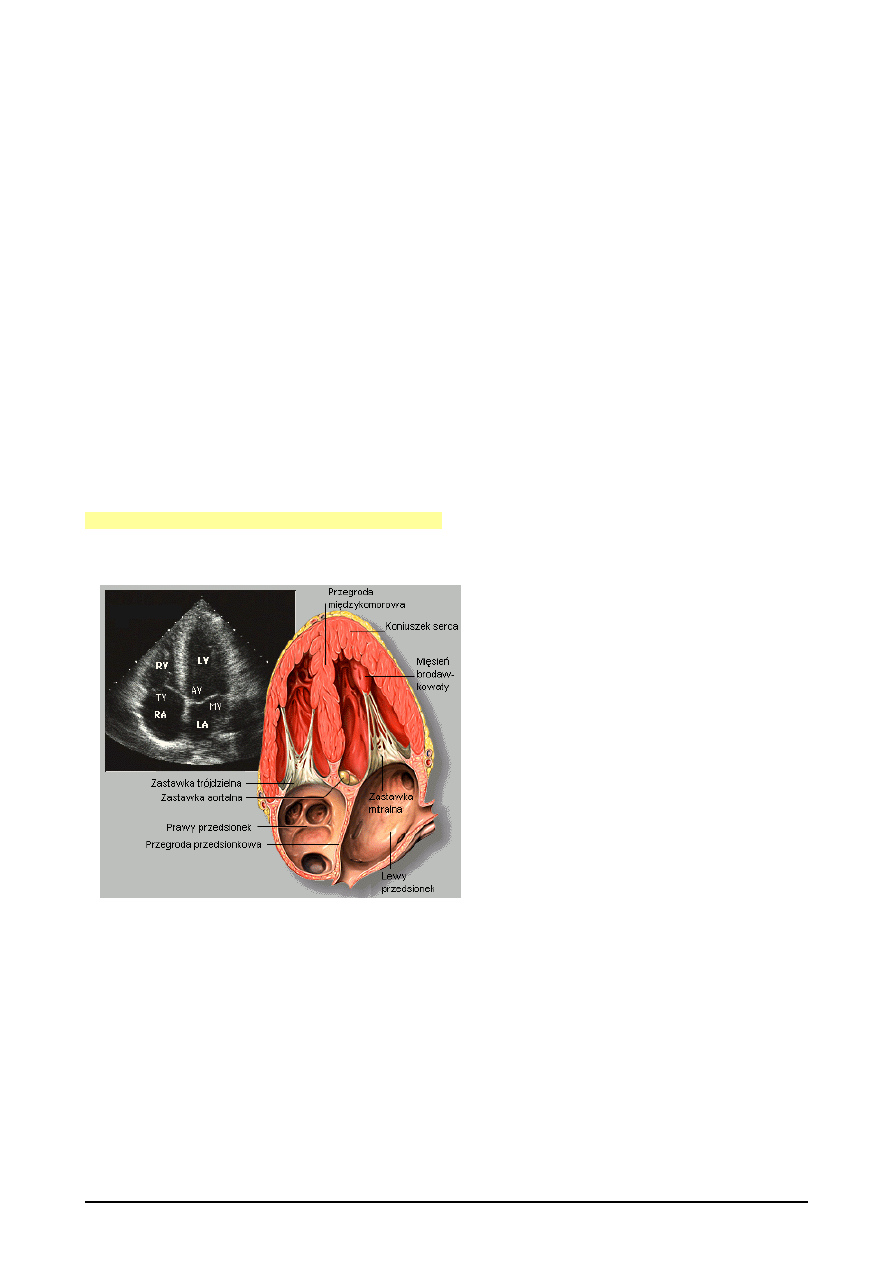
Obrazowa diagnostyka medyczna ( badania USG )
Za pomocą aparatów zwanych ultrasonogra-
fami i głowic mozaikowych można przeprowadzić
szereg bezpiecznych dla organizmu badań na-
rządów wewnętrznych człowieka. Typowymi przy-
kładami są :
− badania
narządów jamy brzusznej ( żołądek,
wątroba, nerki, pęcherz ... ) ;
− badania
płodu, jam serca,
−
przepływów krwi w dużych żyłach i tętnicach
( efekt Dopplera ) ;
− badania struktury gałki ocznej, zatok noso-
wych,
− badanie stopnia zaawansowania osteoporo-
zy - przez pomiar prędkości fali w wybranych
kościach
Badania ultradźwiękowe są szybką, względnie tanią, bezpieczną i rutynową już metodą postępowania
w diagnostyce medycznej. Często są pierwszą alternatywą albo uzupełnieniem badań szkodliwych lub bar-
dzo kosztownych typu : prześwietlenia rentgenowskie, TK - tomografia komputerowa , czy NMR ( magne-
tyczny rezonans jądrowy ) .
Na rysunku pokazano na pierwszym planie szkic przekroju anatomicznego serca - w głębi odpowia-
dający temu przekrojowi echokardiogram.
” Ultradźwięki ” Laboratorium
27
Terapia medyczna
− ultradźwięki stosuje się w zabiegach litotrypsji – rozkruszania tzw. " kamieni " nerkowych silnie zogni-
skowaną wiązką fal ultradźwiękowych o dużym natężeniu, a także przy dezintegracji tkanki tłuszczowej
i innych.
Automatyka przemysłowa
− czujniki ruchu, bardzo popularne w różnych urządzeniach alarmowych, wykorzystanie ciągłej fali ultra-
dźwiękowej w powietrzu, fali odbitej od poruszającej się przeszkody i efektu Dopplera ;
− czujniki ( mierniki ) poziomu cieczy w zbiornikach ( np. z benzyną ) - bazujące na prostym pomiarze
czasu przejścia fali między dnem zbiornika i powierzchnią cieczy ;
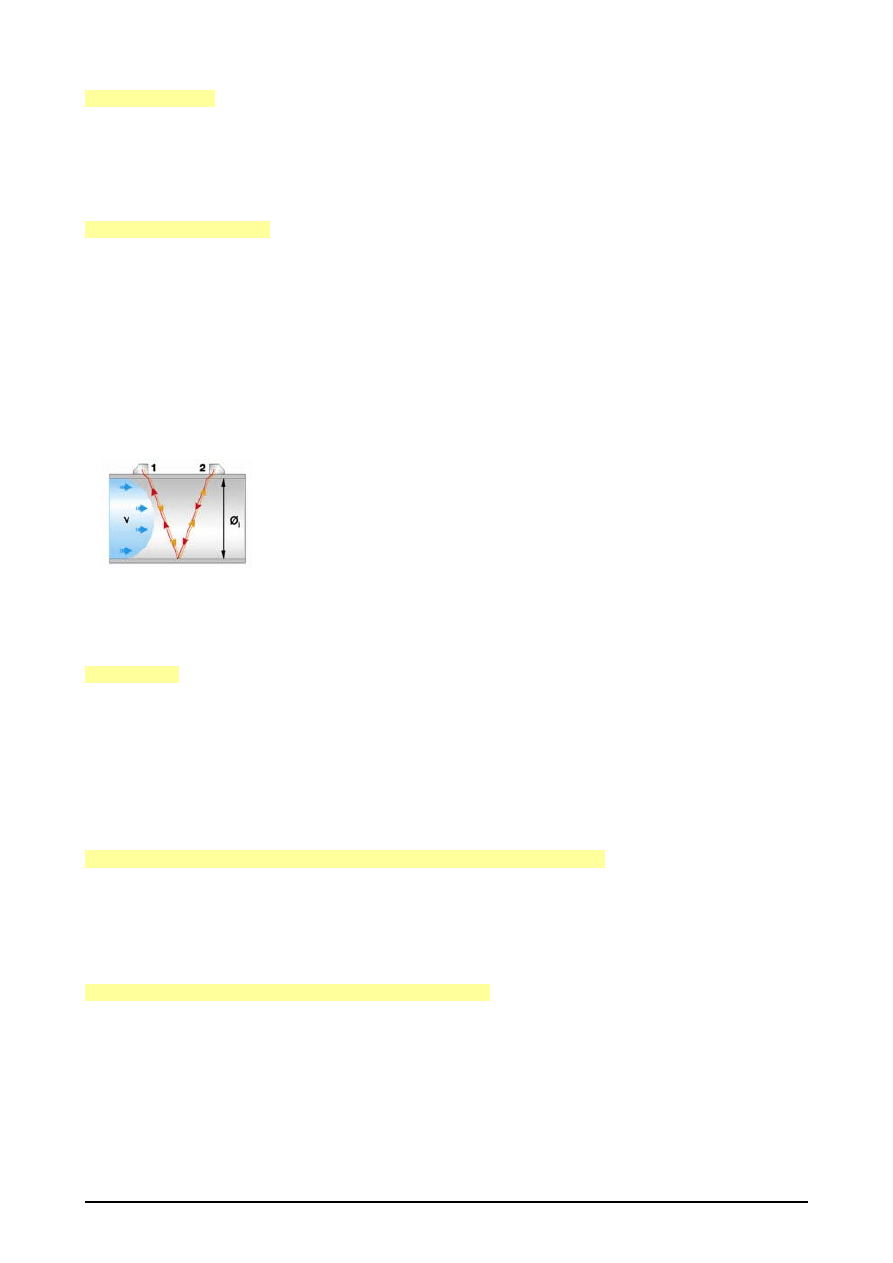
− mierniki
prędkości przepływu cieczy w rurociągach ;
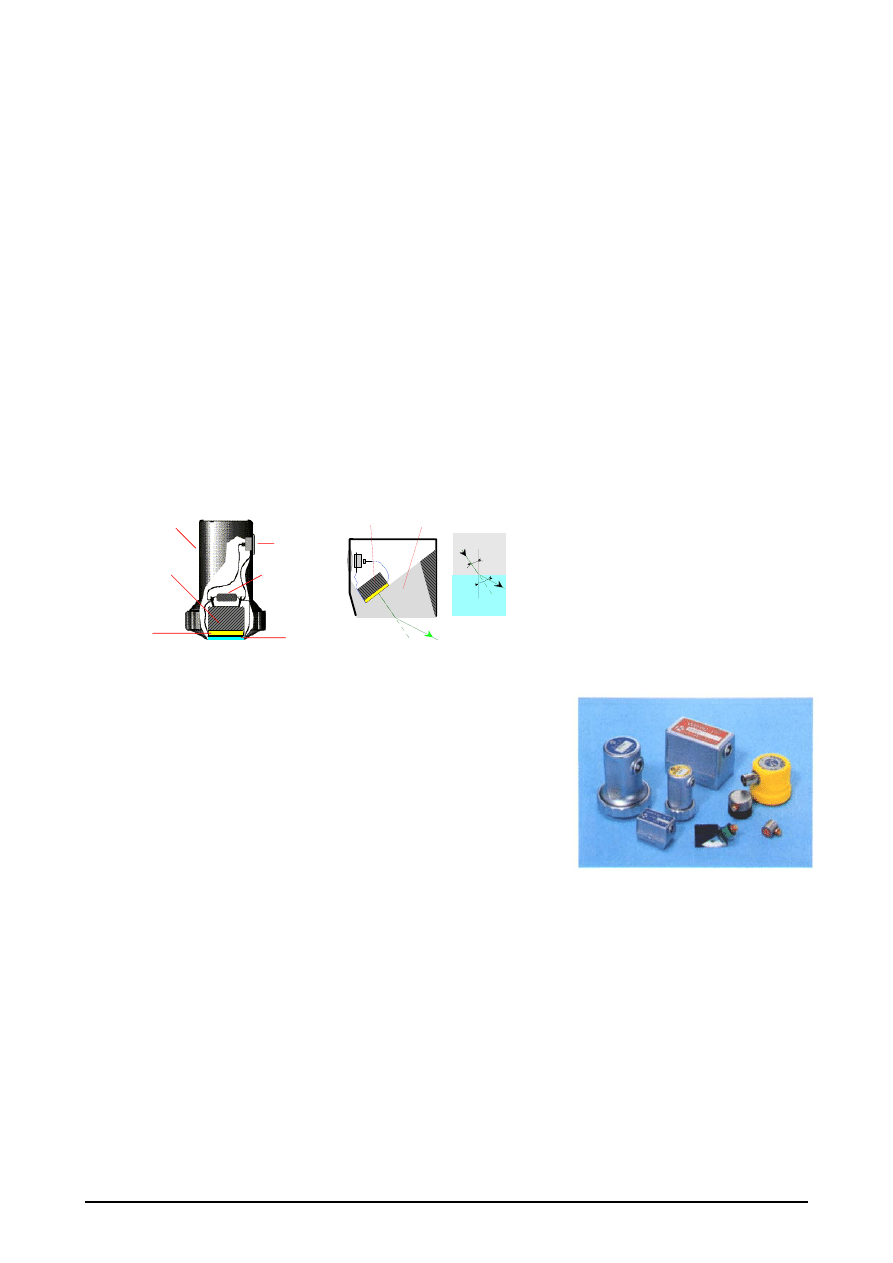
W miernikach prędkości przepływu czas przejścia fali ultradźwiękowej między głowicami jest zależny od
wielu czynników : rodzaju cieczy, średnicy rury czy kąta załamania fali ale także od prędkości przepływu cie-
czy- co jest tu wykorzystywane. Głowice mogą być zainstalowane na zewnętrznej
stronie rurociągu. Zwykle dokonuje się dwóch pomiarów czasu przejścia : zgod-
nie z kierunkiem przepływu ( 1
→2 ) i przeciwnie ( 2→1 ) – a odpowiedni mikro-
procesor przelicza różnice czasów z tych pomiarów na prędkość przepływu albo
na objętość przepływu. Ponadto w algorytmie można łatwo uwzględnić wszelkie
korekcje geometryczne, temperaturowe itd. Oprócz przepływomierzy ultradźwiękowych opartych na czasie
przejścia fali stosowane są przepływomierze ultradźwiękowe bazujące na efekcie Dopplera.
Hydrolokacja
−
echosondy - pomiar głębokości akwenów wodnych przez pomiar czasu przejścia fali odbitej od dna ;
−
sonary - wykrywanie i lokalizacja podwodnych obiektów pływających, ławic ryb itp. Współczesne sona-
ry, zwłaszcza te używane w okrętach podwodnych, wykorzystują zespoły przetworników ( anten ) aku-
stycznych ze skanowaniem elektronicznym obszaru – idea analogiczna jak w głowicach mozaikowych.
W hydrolokacji używa się fal ultradźwiękowych od kilkudziesięciu do kilkuset kHz.
Procesy technologiczne z wykorzystaniem ultradźwięków o dużej energii
−
czyszczenie powierzchni, zgrzewanie wyrobów z tworzyw sztucznych,
− spajanie
wyprowadzeń w strukturach półprzewodnikowych ( układy scalone ) ,
−
katalizatory reakcji ( chemia ) ,
Kontrola jakości wyrobów hutniczych podczas produkcji
−
badanie wad wewnętrznych typu pęknięcia, rozwarstwienia, wtrącenia niemetaliczne w : blachach, prę-
tach, rurach, szynach kolejowych, odkuwkach, odlewach itp.
Znaczna część wyrobów hutniczych, które służą jako materiał do odpowiedzialnych konstrukcji, musi
być badana na okoliczność występowania wewnętrznych i powierzchniowych wad materiałowych. Wyroby z
wadami nie są dopuszczane do eksploatacji. Nawet niewielka wada wewnętrzna materiału może być zarod-
kiem tzw. wady zmęczeniowej, która powiększa się w czasie pod wpływem zmiennych obciążeń mechanicz-
” Ultradźwięki ” Laboratorium
28

nych – w końcu może dojść do nagłej awarii konstrukcji (
np. zbiornika ciśnieniowego, rurociągu, kotła, turbiny. itp.
) pociągając zagrożenie życia i straty materialne. Na
zdjęciu pokazano fragment zautomatyzowanego stano-
wiska do ultradźwiękowego badania rur o dużej średnicy.
Cztery zespoły głowic wprowadzają fale ultradźwiękowe
do ścian rury – całość współpracuje z wielokanałowym
defektoskopem. Głowice są nieruchome natomiast rura
jest wolno przesuwana w kierunku osiowym. Między
głowicami a powierzchnią rury jest niewielka szczelina
rzędu ułamka mm , w którą wtłacza się wodę. Woda za-
pewnia transmisję fal, a szczelina eliminuje bezpośred-
nie tarcie głowic zwiększając ich żywotność.
Kontrola jakości połączeń technologicznych, ubytków korozyjnych, pomiary grubości
−
wykrywanie wad w połączeniach spawanych w : rurociągach, zbiornikach ciśnieniowych, kotłach,
− badanie
jakości połączeń zgrzewanych, klejonych ;
− badanie
grubości ścianek zbiorników, rur ... - zwłaszcza przy dostępie tylko z jednej strony ;
Spawanie to jeden z najczęściej używanych sposobów łą-
czenia metali. Badanie spoin to klasyczny przykład zastoso-
wania przenośnych defektoskopów ultradźwiękowych ( pra-
wie 70% zastosowań ) . Różne wady spoin ( typu : pęknięcia,
przyklejenia brzegowe, pęcherze gazowe, wtrącenia żużlowe
) mogą osłabiać wytrzymałość konstrukcji albo być zarodkiem
wad zmęczeniowych i prowadzić do nagłych uszkodzeń.
Ręczne ultradźwiękowe badanie spoin jest pracochłonne,
wymaga doświadczenia operatora i jest dosyć trudne inter-
pretacyjnie. Stąd cyfrowe aparaty ultradźwiękowe mają sze-
reg wbudowanych opcji wspomagających badanie spoin.
Często defektoskop jest ” przystawką ” do komputera przeno-
śnego jak na zdjęciu obok. W masowych badaniach spoin z powodzeniem wdraża się automatyzację ,np. na
budowach rurociągów dalekosiężnych – gdzie aparatura badawcza instalowana jest na samochodach tere-
nowych. W wielu przypadkach badania spoin nie da się zautomatyzować albo jest to nieopłacalne. Wiele
spoin jest badanych w instalacjach technologicznych przemysłu chemicznego i petrochemicznego oraz na
morskich platformach wydobywczych ropy i gazu. Alternatywna metoda badania spoin to radiografia prze-
mysłowa – czyli prześwietlanie spoin promieniowaniem X lub gamma, z rejestracją obrazu spoiny na kliszy.
Szkodliwość promieniowania X i gamma dla człowieka, wysoki koszt - to główne mankamenty radiografii.
Diagnostyka techniczna w czasie eksploatacji : konstrukcji, urządzeń, pojazdów
− wykrywanie ” zmęczeniowych ” wad materiałowych w newralgicznych punktach samolotów, okrętów,
pojazdów szynowych, szynach kolejowych , turbinach energetycznych, łożyskach ślizgowych ;
− ocena
naprężeń w materiale ( monoblokowe koła kolejowe, szyny, wały silników okrętowych ) ;
” Ultradźwięki ” Laboratorium
29
− wykrywanie
pęknięć ” termicznych ” w prętach paliwowych elektrowni jądrowych ;
− prognozowanie
nagłych katastrof szczególne odpowiedzialnych urządzeń - przez ciągły monitoring
emisji akustycznej materiałów poddanych ekstremalnym obciążeniom ;
Badanie szyn kolejowych w torze to następny przykład zastosowania ultradźwięków w tzw. obszarze
NDT ( ang. Nondestructive Testing ) – czyli ba-
dań nieniszczących. Na zdjęciu obok przekrój z
rozwijającą się wadą zmęczeniową w główce
szyny. Takie wady prowadzą do pęknięć całej
szyny. Okresowa kontrola defektoskopem szy-
nowym ma za zadanie wykrywać takie wady.
Badania masowe szyn prowadzone są w spo-
sób zautomatyzowany aparaturą w specjalnym
kolejowym wagonie diagnostycznym. Dwie szy-
ny w torze badane są kilkunastoma głowicami
ultradźwiękowymi – prędkość badania
do100km/h. Często taki wagon dodatkowo pro-
wadzi badania szyn innymi metodami, np. magnetycznymi albo pomiary geometrii toru metodami laserowy-
mi.
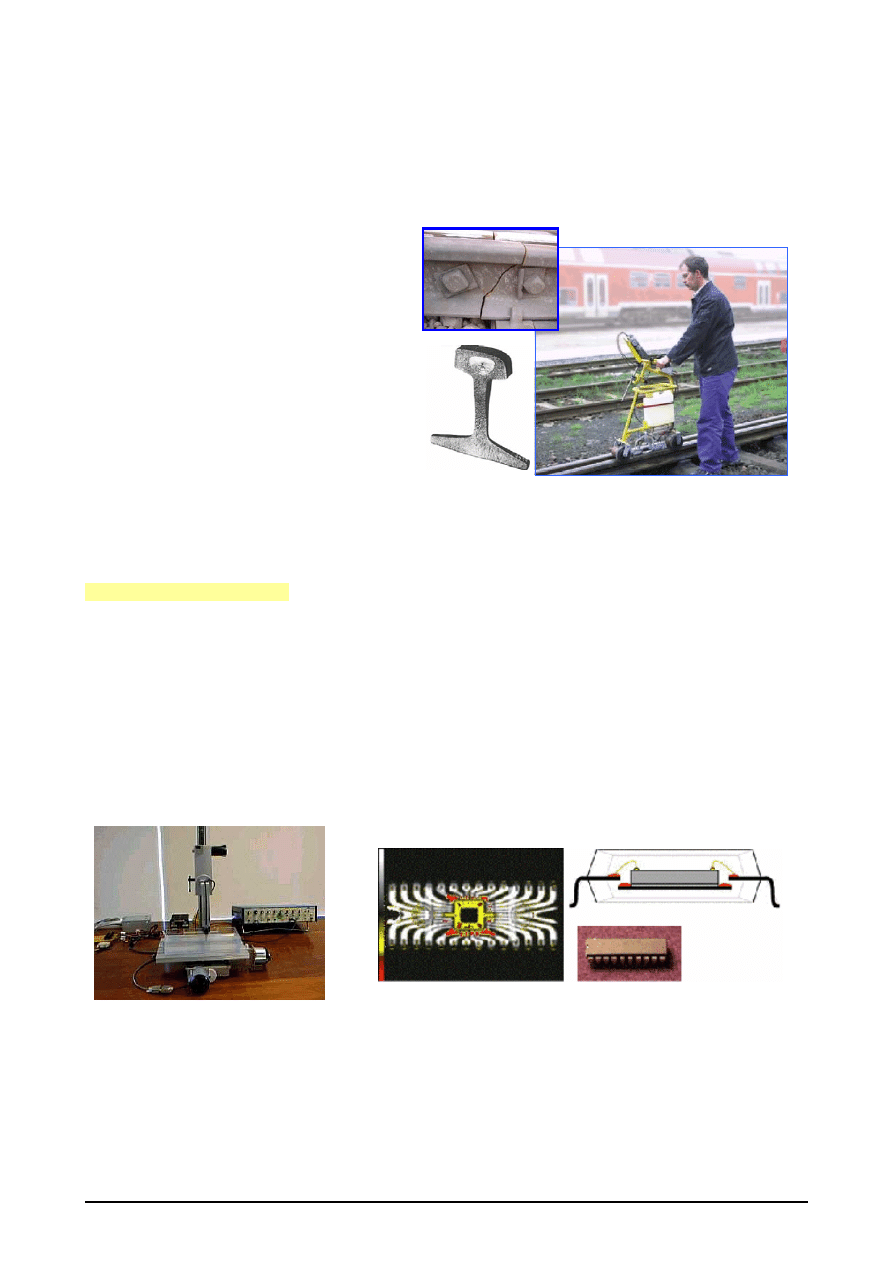
Inżynieria materiałowa i inne
− ocena
własności materiałów przez pomiar prędkości i tłumienia fal ultradźwiękowych o różnych często-
tliwościach : w metalach, stopach, materiałach kompozytowych, skałach, ceramikach ;
− mikroskopia
ultradźwiękowa – zobrazowanie struktur wewnętrznych ciał stałych z rozdzielczością kilku-
nastu mikrometrów - użycie zogniskowanych wiązek fal o częstotliwości kilkuset MHz ;
−
budownictwo : ocena wytrzymałości betonu na ściskanie, wykrywania pęknięć w konstrukcjach betono-
wych, ocena stanu nawierzchni drogowej ;
−
akustoelektronika : ultradźwiękowe linie opóźniające, filtry z falą powierzchniową.
Na zdjęciu po lewej stronie - głowica i manipulatory przesuwu laboratoryjnego mikroskopu ultradźwiękowe-
go. Sprzężenie akustyczne z badanym obiektem przez wodę. Zdjęcie po stronie prawej - przykład zobrazo-
wania na tym mikroskopie ultradźwiękowym struktury wewnętrznej układu scalonego. Miejsca delaminacji
względem podłoża wyróżnione są w kolorze żółtym i czerwonym.
” Ultradźwięki ” Laboratorium
30
Badania ultradźwiękowe wkraczają również
do budownictwa. Znane i używane są metody
określania wytrzymałości betonu na ściskanie na
podstawie prędkości rozchodzenia fal podłużnych
w betonie. Ze względu na silne tłumienie fal w be-
tonie używa się głowic ultradźwiękowych o niskich
częstotliwościach – rzędu 50 ... 200 kHz .
Na zdjęciu pomiar jakości betonu pasa startowego
inną metodą akustyczną, polegającą na analizie
odpowiedzi impulsowej drgań powierzchni po sil-
nym uderzeniu bijakiem młotka.
” Ultradźwięki ” Laboratorium
31
9. PRZEBIEG ĆWICZENIA
9.1 ZAPOZNANIE Z OBSŁUGĄ DEFEKTOSKOPU ULTRADŹWIĘKOWEGO UMT-17
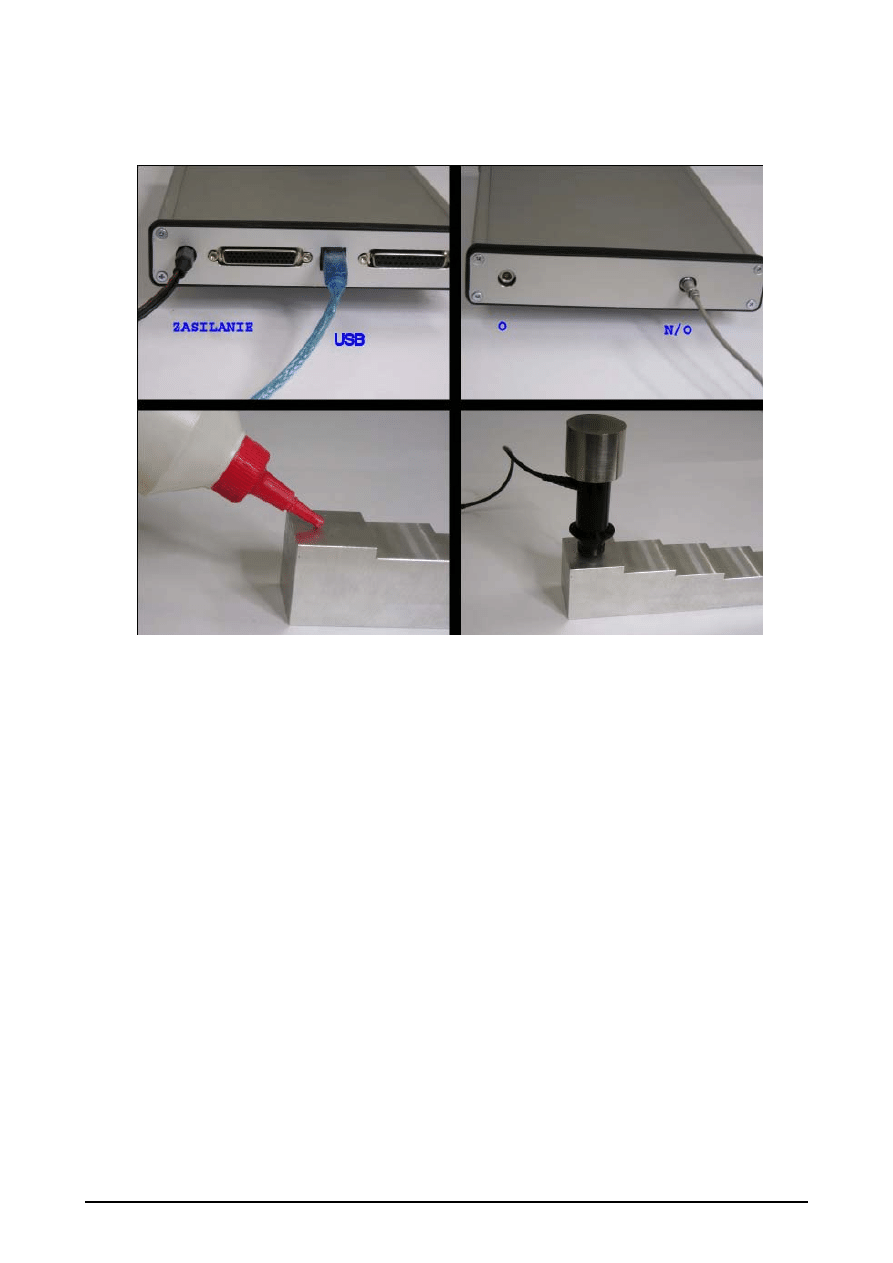
− Sprawdzić czy kabel USB jest podłączony do komputera PC , uruchomić komputer, włączyć wtyk zasila-
nia defektoskopu UMT-17 . Podłączyć kabel głowicy do gniazda ” N/O ” . ( Uwaga !! - wtyki kabelka typu
” Lemo ” mają zatrzask i wyjęcie jest możliwe ciągnąc za wtyk a nie za kabel ) .
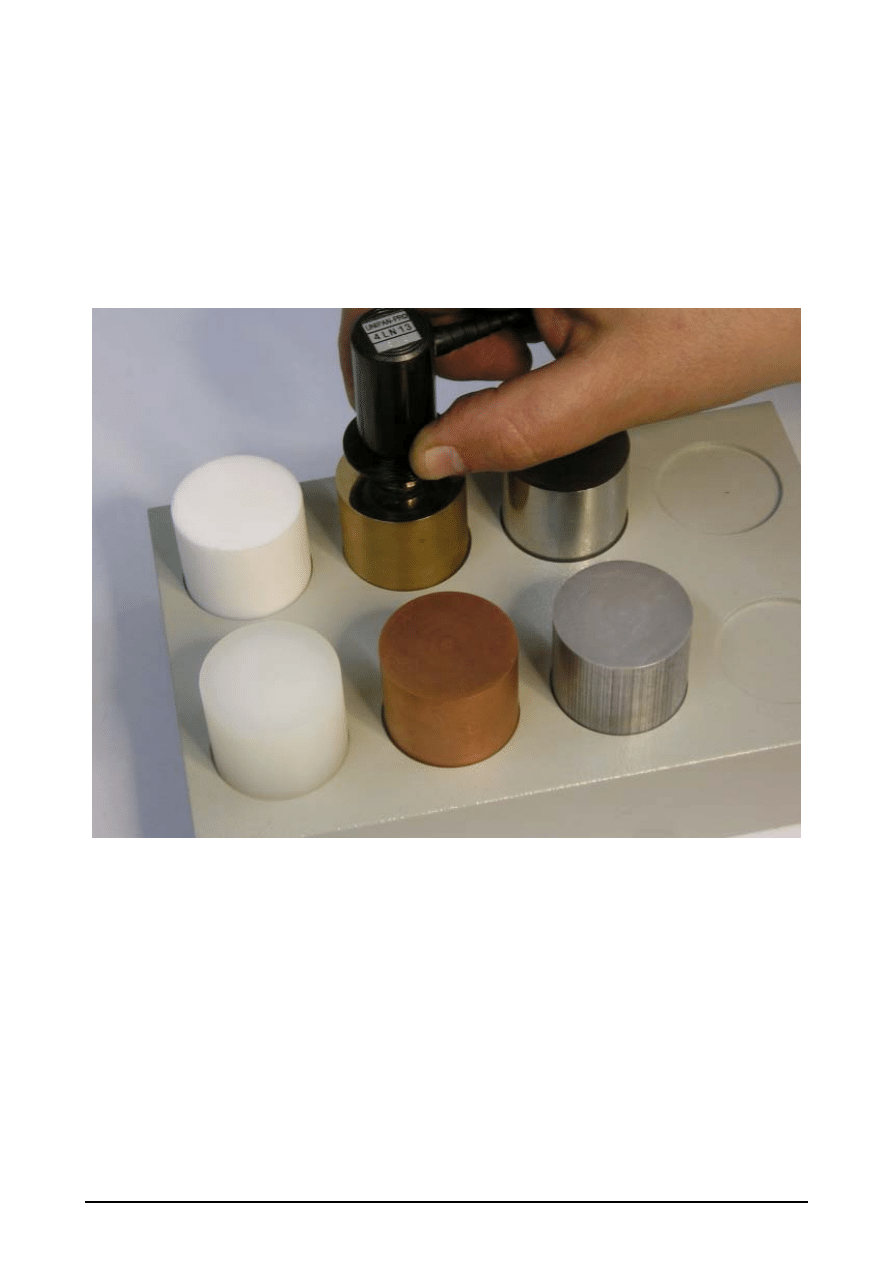
− Na wzorcu schodkowym zwilżyć powierzchnię pierwszego schodka ( wys. 40 mm ) kilkoma kroplami
oliwki lub żelu i postawić głowicę ultradźwiękową 4LN13 . Docisk głowicy ręką albo ciężarkiem.
− Uruchomić program UMT17.exe z katalogu gdzie jest zainstalowany albo z ikony UMT-17 na pulpicie ;
− Wybrać z menu opcję ” Plik - Wczytaj Definicję ” . Z listy wybrać definicję ” Ultradźwięki Laboratorium
” i przepisać ją do programu klawiszem
” OK ” . Każda wczytana definicja zawiera 8 zestawów nastaw,
wybrać pierwszy zestaw – przez kliknięcie lewym klawiszem myszki na ” 1 ” w przełączniku 1 ... 8 .
− Kliknięcie prawym klawiszem myszki na wybranej pozycji przełącznika 1 ... 8 daje dostęp do objaśnień
tekstowych i graficznych ( np. jak zdjęcie powyżej ) dla wybranego zestawu.
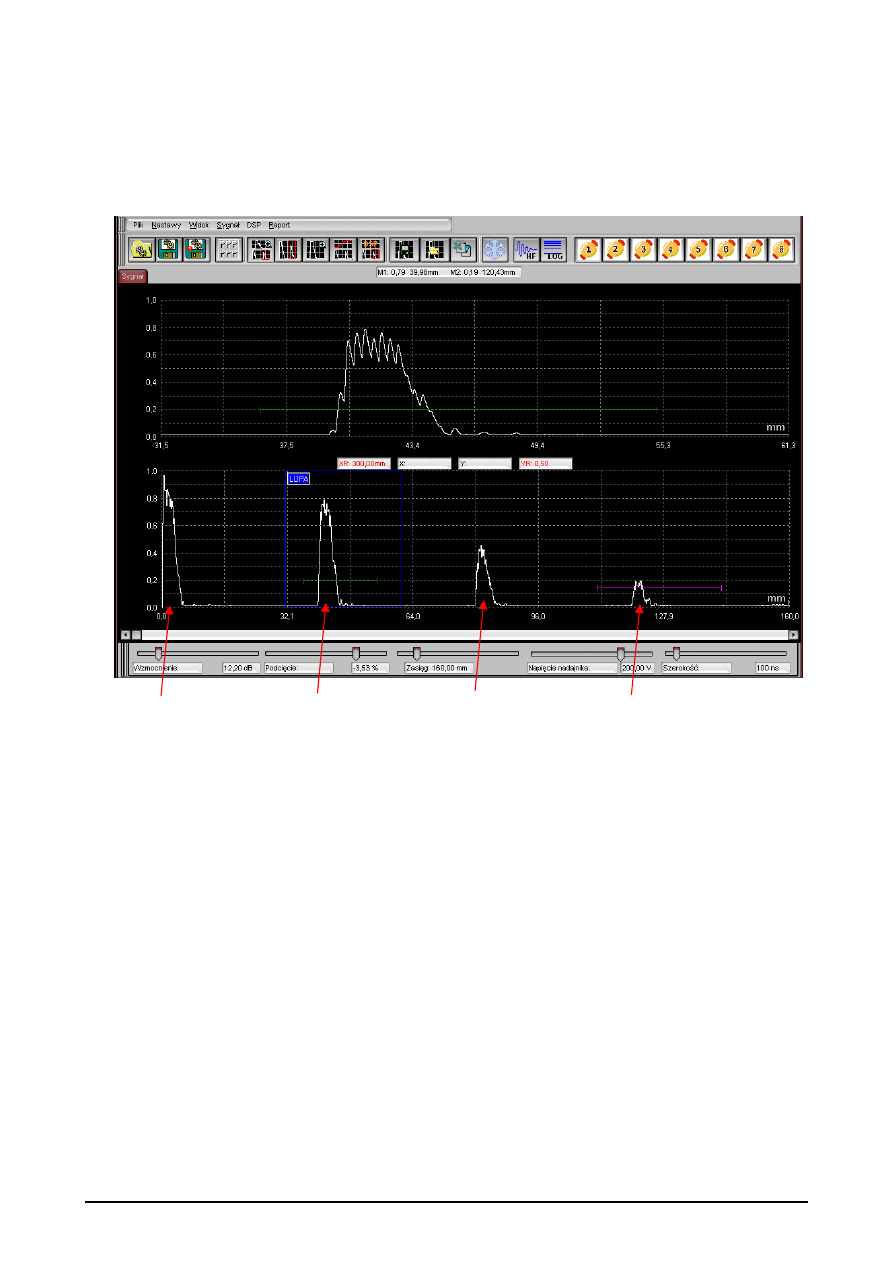
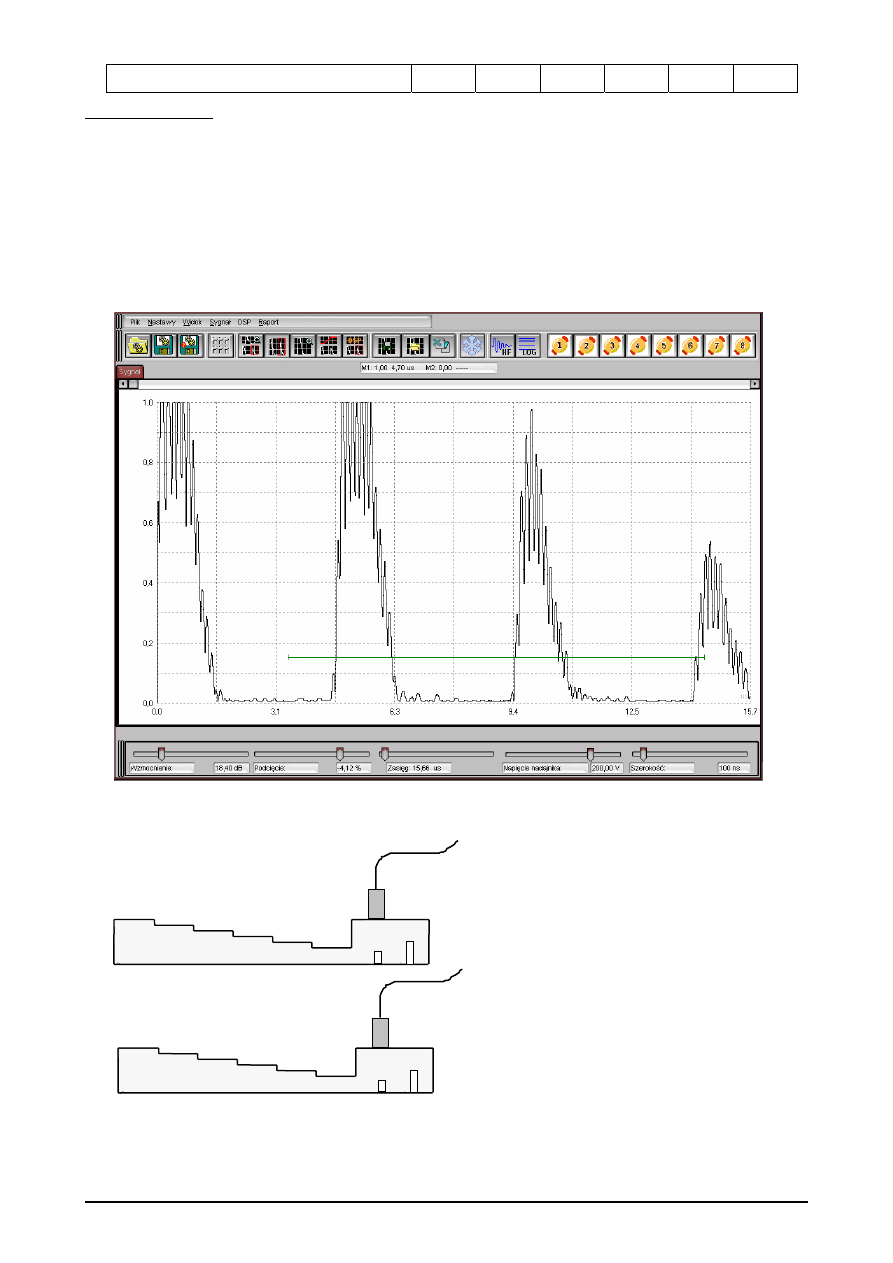
− Na ekranie komputera pojawi się obraz jak poniżej. Dolne okno sygnałowe zwane oknem głównym po-
kazuje ciąg impulsów odpowiadający wielokrotnym odbiciom fali ultradźwiękowej między płaszczyznami
próbki ( w tym przypadku odległymi o 40mm ) . Okno lupy obrazuje ” rozciągnięty w czasie ” ograniczony
ramką fragment z okna głównego.
− Sprawdzić jak niezwykle istotne jest sprzężenie akustyczne między głowicą emitującą falę a próbką, do
której fala wnika. Pamiętamy, że fala ultradźwiękowa jest fala mechaniczną i może rozchodzić się tylko
w ośrodkach materialnych. Suchy kontakt miedzy głowicą a próbką skutkuje znikomą transmisją fali z
uwagi na chropowatość obu powierzchni. Dopiero warstwa ośrodka sprzęgającego ( np. oleju, smaru,
” Ultradźwięki ” Laboratorium
32
żelu, wody ) wypełnia te chropowatości i zapewnia możliwość przekazywania drgań mechanicznych,
czyli propagację fali. Sprawdzić jak wyglądają echa przy suchym kontakcie oraz przez żel dotykając
głowicę ręką z różną siłą nacisku i w różnych miejscach próbki. Powrócić do sytuacji początkowej
sprzęgając głowicę przez żel.
1-sze echo
”dna” próbki
2-gie echo
”dna” próbki
3-cie echo
”dna” próbki
Impuls
nadajnika
Po wcześniejszym zapoznaniu się ze skróconym opisem ( na końcu opracowania ) elementów graficz-
nych ekranu zapoznać się z ich działaniem :
− Zaobserwować wpływ położenia suwaka ” Zasięg ” na rysunek ech oraz skojarzone z oknem skale
odległości [mm] ( albo czasu [μs] ) ;
− Przesuwać ramkę ” Lupy ” ciągnąc myszką jeden z boków ramki. Jeśli ramka jest niewidoczna można
ją sprowadzić do okna wybierając z lokalnego menu ( prawy klawisz myszki ) ” Przywołaj ramki ” ;
− Zaobserwować wpływ parametrów odpowiedzialnych za energię fali ultradźwiękowej emitowanej przez
głowicę, poprzez manipulację suwakami ” Napięcie nadajnika ” i ” Szerokość ” , na kształt i wyso-
kość ech. Ustawić napięcie = 200V. oraz optymalną szerokość. Rozpoczynamy regulację szerokości od
wartości minimalnej – za optimum przyjmujemy wartość szerokości dla pierwszego maksimum wysoko-
ści ech ( zazwyczaj są kolejne maksima ) ;
− Zaobserwować wpływ manipulacji suwakiem ” Podcięcie ” na echa . Ustawić podcięcie tak aby linia
zerowa sygnału pokrywała się z linią zerową okna z tolerancją 1piksela. Teoretycznie powinno to wy-
padać dla położenia suwaka = 0 % , w praktyce występuje pewna systematyczna odchyłka tego poło-
” Ultradźwięki ” Laboratorium
33

żenia od wartości 0 % . Prawidłowe ustawienie podcięcia ma istotny wpływ na wskazania wysokości
ech podczas automatycznych pomiarów monitorowych i pomiarach kursorowych.
− Zaobserwować zmiany ech ultradźwiękowych przy manipulacji suwakiem ” Wzmocnienie ” . Zastano-
wić się jaki jest cel regulacji wzmocnienia w defektoskopie ? Ustawić ramkę lupy na 2 echo dna. Do-
brać wzmocnienie tak, aby wysokość 2-go echa dna była 0.4 H ( tzn. 40 % wysokości okna ) i zanoto-
wać tę wartość w [dB] . Następnie sprawdzić czy przyrost ( spadek ) wzmocnienia o 6 dB spowoduje
dwukrotny wzrost ( spadek ) wysokości echa. W sprawozdaniu przeprowadzić rachunkowy dowód tego
eksperymentu korzystając z definicji wzmocnienia wyrażonej w [dB] ;
− Zapoznać się z dostępnymi w programie widokami okien, korzystając z opcji menu ” Widok ” albo z pię-
ciu przycisków widoku ;
− Zapoznać się z dostępnymi w programie typami obrazowanych sygnałów ultradźwiękowych :
1. przełącznik ” LIN ” albo ” LOG ” wybiera typ wzmacniacza w odbiorniku defektoskopu-gdzie ” LIN
” oznacza odbiornik o charakterystyce liniowej a ” LOG” o charakterystyce logarytmicznej.
• Jeśli przez
A
out
oznaczymy amplitudę ( wysokość ) ech rysowanych na ekranie a przez
A
in
amplitudę sygnału z głowicy ultradźwiękowej to zależności są takie :
• dla toru liniowego
A
out
= W x A
in
; gdzie
W
- regulowane wzmocnienie defektoskopu
• dla toru logarytmicznego
A
out
= k x log ( A
in
)
;
gdzie k - stała ;
• W
tym
ćwiczeniu odbiornik logarytmiczny nie jest używany. Należy pamiętać, że napis na
przycisku jest w konwencji negacji – jeśli jest napis LOG to aktualnie wybrany jest tor liniowy i
odwrotnie.
2. przełącznik ” HF ” albo ” LF ” dotyczy tylko toru liniowego i wybiera typ rysowanego sygnału
gdzie ” HF ” oznacza tzw. sygnał wielkiej częstotliwości, taki jaki rzeczywiście odbieramy z głowicy
w wyniku oddziaływania z falą ultradźwiękową, a ” LF ” oznacza tzw. sygnał niskiej częstotliwości,
czyli sygnał HF poddany detekcji i filtracji obwiedni. Zobrazowanie LF ma mniej szczegółów i przy
typowych zastosowaniach defektoskopów, jak wykrywanie wad materiałowych, jest wygodniejsze.
Tu również napis na przycisku jest w konwencji negacji, czyli jeśli jest napis ” HF ” to aktualnie ry-
sowany jest sygnał typu LF i odwrotnie.
− Zapoznać się ze sposobem przemieszczania bramek monitorów M1 i M2 ( początek, długość , próg )
przez operacje myszką oraz z okienek dialogowych a także z automatycznymi pomiarami położenia
( metodą progową ) i wysokości ech w obszarze bramki. Jeśli bramki są niewidoczne to można je spro-
wadzić do obszaru okna opcją ” Przywołaj monitory ” z lokalnego menu ( prawy klawisz myszki ). Po-
dwójne kliknięcie na belce monitora otwiera okienka dialogowe monitorów ;
− Zapoznać się z ważną opcją skalowania okien sygnałowych – dostęp z przycisku ” Nastawy ” lub z me-
nu ” Nastawy – Nastawy-Skalowanie ” . Osie poziome okien sygnałowych mogą być opisane w jed-
nostkach czasu lub odległości, a przeliczenia są dokonywane z uwzględnieniem parametrów takich jak :
metoda, prędkość fali, kąt wnikania fali, czas korekcji ( opóźnienie własne głowicy ) ;
−
Każde okno sygnałowe ma możliwość tzw. pomiarów kursorowych – określając położenie kursora
myszki bezwzględnie lub różnicowo względem ustawianych linii odniesienia. Uaktywnianie pomiarów
kursorowych jest dostępne z lokalnego menu ( prawy klawisz myszki ) – a część ustawień jest dostępna
w opcji ” Właściwości ” lokalnego menu.
” Ultradźwięki ” Laboratorium
34
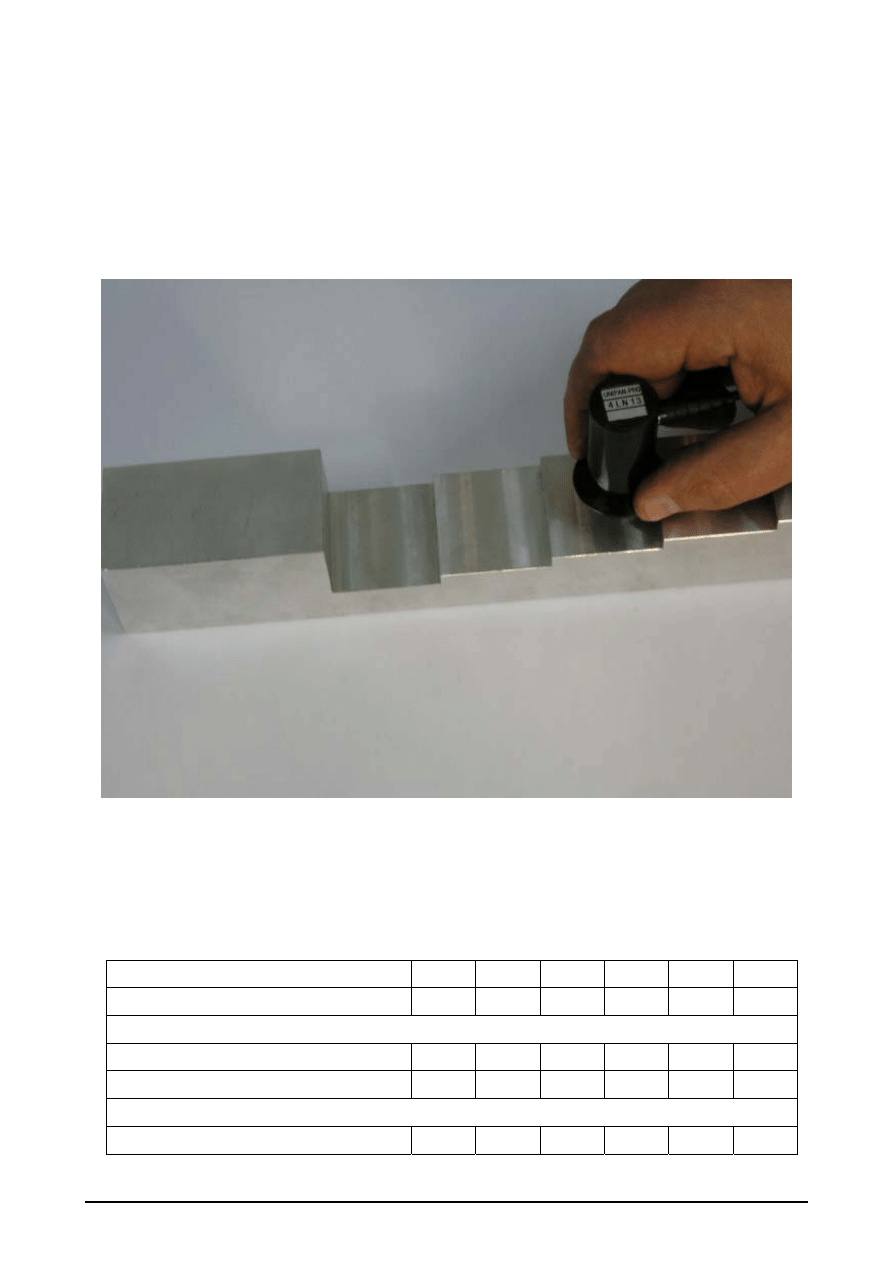
9.2 POMIAR CZASU PRZEJŚCIA PODŁUŻNEJ FALI ULTRADŹWIĘKOWEJ W ZALEŻNOŚCI OD DROGI
Wybrać drugi zestaw nastaw klikając na przycisku 2 przełącznika 1 … 8 . Obejrzeć objaśnienia do tego
zestawu nastaw. Używając głowicy 4LN13 i wzorca schodkowego zbadać dla wszystkich schodków zależ-
ność czasu przejścia fali oraz pomierzyć grubość schodka – przy włączonej korekcji czasu oraz bez korekcji.
Przechodzenie między odczytami A,B, C, D jest możliwe przez odpowiednie ustawienia w opcji ” Na-
stawy- Skalowanie ” . Dla pewności można sprawdzić suwmiarką czy podane w tabeli wymiary fizyczne
schodków są prawidłowe.
Wymiar fizyczny schodka h [mm]
40 35 30 25 20 15
Droga fali w próbce s [mm]
80 70 60 50 40 30
A. Czas przejścia t [usek]- korekcja włączona
B. Grubość z pomiaru [mm] - korekcja włączona
C. Czas przejścia t [usek]- korekcja wyłączona
” Ultradźwięki ” Laboratorium
35
D. Grubość z pomiaru [mm] - korekcja wyłączona
W sprawozdaniu :
Załączyć tabelę z pomiarami. Narysować wykresy t = f(s) . Korzystając z elementarnej definicji prędko-
ści : V = ΔS / Δt wyznaczyć tę prędkość. Z otrzymanego wykresu a także analitycznie wyznaczyć czas
opóźnienia własnego głowicy t
0
.
t = t
0
+ S / V
gdzie : t - czas przejścia, t
0
- opóźnienie własne głowicy, S – droga fali , V - prędkość fali
W najdłuższym schodku są dwa cylindrycz-
ne otwory płaskodenne, co łatwo stwierdzić
patrząc od spodu wzorca schodkowego.
Zakładając, że nie wiemy gdzie są te otwo-
ry - spróbujemy zlokalizować te otwory gło-
wicą od górnej płaszczyzny na podstawie
echa od płaskiego dna otworu. Być może
konieczne będzie zwiększenie wzmocnie-
nia. Po wykryciu zmierzyć przez pomiar
monitorowy albo kursorowy głębokość każ-
dego otworu a następnie skonfrontować to
z pomiarem mechanicznym suwmiarką.
” Ultradźwięki ” Laboratorium
36
9.3 POMIAR PRĘDKOŚCI FAL PODŁUŻNYCH W CIAŁACH STAŁYCH I CIECZACH
Wybrać trzeci zestaw nastaw klikając na przycisku 3 przełącznika 1 ... 8 . Obejrzeć objaśnienia do tego
zestawu nastaw. Używając głowicy 4LN13 i próbek walcowych z różnych materiałów (o wys. 30 mm ) wy-
znaczymy prędkość fal podłużnych bazując na elementarnej zależności :
prędkość fali = droga fali / czas przejścia
V = S / t
Jako drogę fali przyjmujemy podwójną wysokość próbki, a czas przejścia to czas między kolejnymi
echami dna próbki. Czas przejścia będzie wyznaczony wbudowaną w program procedurą korelacyjną.
” Ultradźwięki ” Laboratorium
37
W okienku ” DSP-Właściwiości DSP ” wpisujemy drogę fali 60 mm, następnie wybieramy z menu
” DSP-Korelacja ” .
Materiał
aluminium stal miedź mosiądz araldit teflon
gliceryna
woda
Droga fali s [mm]
60 60
60 60 60 60 10
10
Czas przejścia t [usek]
Prędkość fali [m/sek]
W sprawozdaniu :
Załączyć tabelę z pomiarami. Dla każdego materiału obliczyć impedancje akustyczne oraz ile % energii
fali podłużnej padającej z wody prostopadle na próbkę wniknie do t materiału.
− Ustawiamy
głowicę na zwilżonej oliwką próbce i dociskamy tak, aby uzyskać dwa kolejne echa dna.
Dobieramy wzmocnienie tak, aby wysokość pierwszego echa dna była ok. 70 ... 90% wysokości okna ;
− Ramki
” 1 ” i ” 2 ” ustawiamy myszką tak, aby całkowicie obejmowały echa. Całą ramkę przesuwa się
ciągnąc myszką jej górną lub dolną krawędź a szerokość ramki ciągnąc lewy lub prawy bok. Jeśli ramki
są niewidoczne w oknie to przywołujemy jez lokalnego menu opcją ” Przywołaj ramki ” ;
−
Czas przejscia dt = .... [μs] i prędkość fali V = .... [m/s] odczytujemy z pola wyniku nad oknem korelacji ;
− Powtarzamy
tę procedurę dla każdej próbki metalowej, czyli dla: stali, aluminium, mosiądzu i miedzi ;
−
Próbki z tworzywa sztucznego araldit oraz teflon są materiałami silnie tłumiącym fale o częstotliwości
4 MHz i trudno jest uzyskać wyraźne echa dna, zatem użyjemy głowicy 2LN13 o częstotliwości 2 MHz.
Ustawiamy głowicę na próbce z ” araldit ” i dobieramy optymalną szerokość i wzmocnienie tak, aby uzy-
skać wysokość pierwszego echa dna ok. 70 ... 90 % wysokości okna. Analogicznie jak poprzednio ram-
ki ustawiamy na pierwsze i drugie echo dna i z pola odczytu notujemy wynik ( dla araldit prędkość fali
jest około 2545 m/s ) . Jeśli drugie echo dna jest bardzo małe, to można je lokalnie wzmocnić stosując
zasięgową regulację wzmocnienia. Przykład edycji krzywej regulacji pokazano na rysunku poniżej.
” Ultradźwięki ” Laboratorium
38
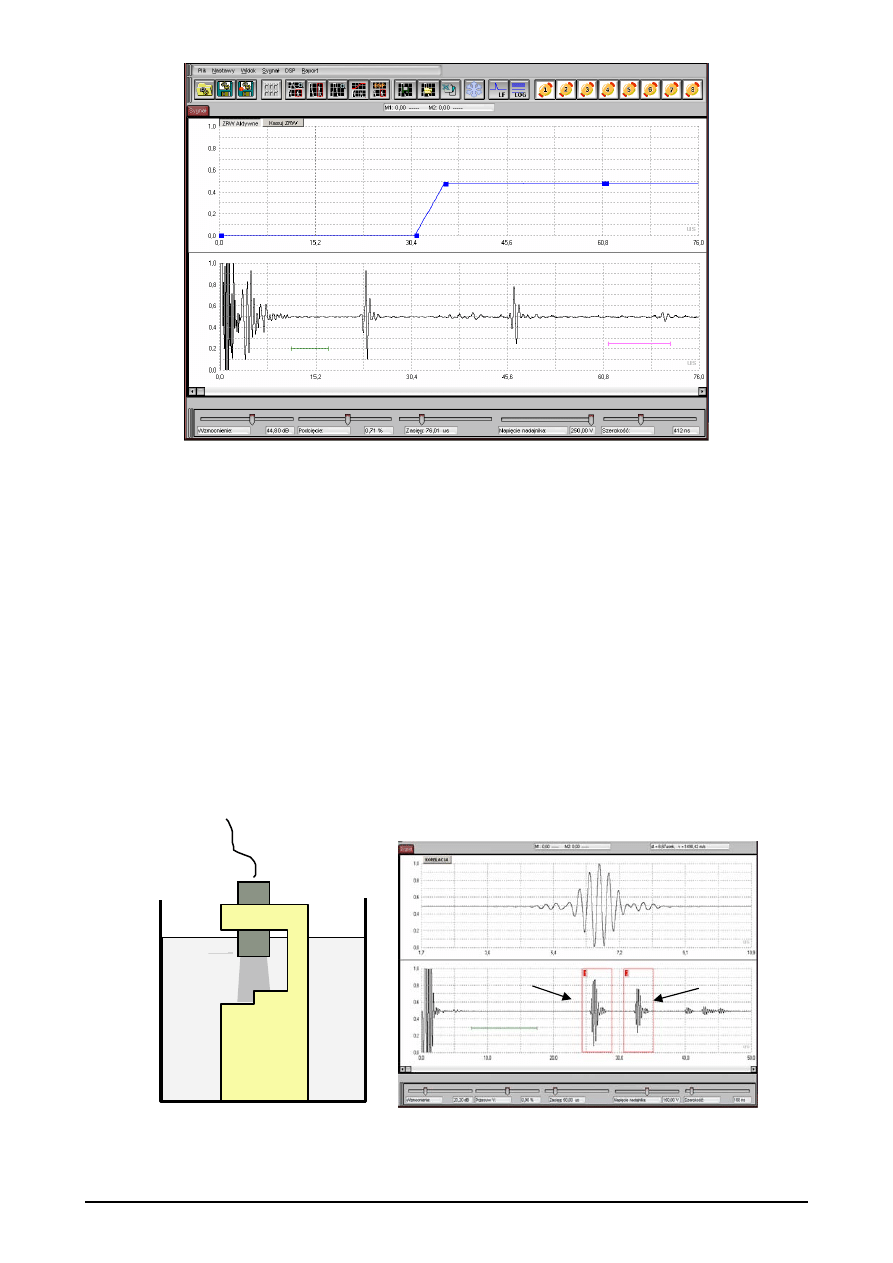
−
Dla próbki teflonowej postępujemy podobnie jak dla próbki z aralditu, tu jednak tłumienie fal ultradźwię-
kowych będzie jeszcze silniejsze.
Przy pomiarze prędkości fal ultradźwiękowych w cieczach używamy specjalnego uchwytu głowicy zanu-
rzanego w cieczy. Konstrukcja uchwytu zapewnia odbicie wiązki fali od dwóch płaszczyzn odległych od sie-
bie dokładnie o 5 mm . Oznaczmy płaszczyznę czoła głowicy jako ( 0 ) . Na ekranie uzyskamy dwa echa :
pierwsze od płaszczyzny bliższej głowicy ( 1 ) – droga fali [ 0→1→0 ] a drugie od płaszczyzny ( 2 ) - droga
fali [ 0→2→0 ] . Różnica dróg fali w wodzie wynosi zatem Δs = 2 x 5 mm = 10 mm . Mierząc czas między
echami metodą korelacyjną możemy obliczyć prędkość fali w cieczy. Warto zauważyć, że w metodzie tej nie
trzeba znać bezwzględnej odległości czoła głowicy od próbki a jedynie wysokość ” schodka ” ( 5mm ) , która
jest stała i może być bardzo dokładnie określona.
Głowica
4LN13
0
2
1
3
woda
0-2-
0-1-
” Ultradźwięki ” Laboratorium
39
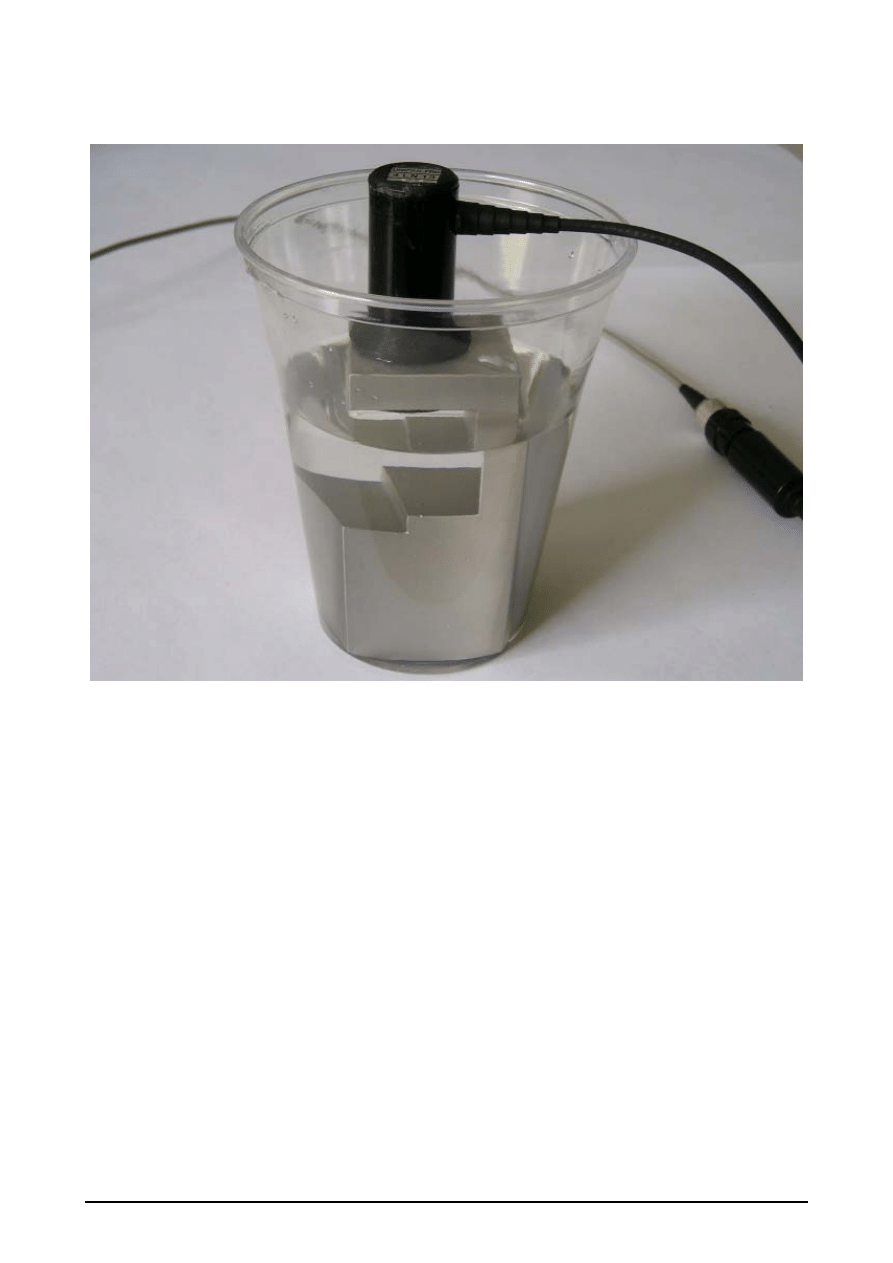
Pomiar prędkości fali ultradźwiękowej w wodzie przeprowadzamy następująco :
− Wybieramy
4 zestaw nastaw i oglądamy objaśnienia. Wybieramy widok ” DSP-Korelacja ” ;
−
Głowicę 4LN13 ( starannie oczyszczoną z oliwki lub żelu !! ) umieszczamy w uchwycie ,wkładamy
do naczynia i nalewamy wody do poziomu jak na rysunku. W opcji ” DSP - Właściwości DSP ” usta-
wiamy drogę fali 2x5mm =10mm ;
− Podobnie jak w poprzednich pomiarach korelacyjnych, dobieramy wzmocnienie aby 1 echo miało od
50 % do 90 % wysokości okna, ustawiamy ramki na echach i odczytujemy z pola wyniku korelacji czas
przejścia dt = .... [μs] i prędkość fali V = .... [m/s] ;
−
Ten sam eksperyment można powtórzyć z inną cieczą, np.gliceryną.
Warto jeszcze zaobserwować dalsze echa : w widoku wybrać tylko okno główne, ustawić typ zobrazowa-
nia sygnału na LF , zwiększyć zasięg do ok.80 μs, zwiększyć wzmocnienie tak aby uzyskać echa podobne
do obrazu jak na rysunku poniżej. Interesująca jest interpretacja tych ech – podstawowa umiejętność w ba-
daniach ultradźwiękowych. Na rysunku określone są drogi fal dla kilku ech. Korzystając z opcji ” Pomiary
kursorowe ” zmierzyć położenia ech i określić, jaka jest droga fali dla echa xx .
” Ultradźwięki ” Laboratorium
40
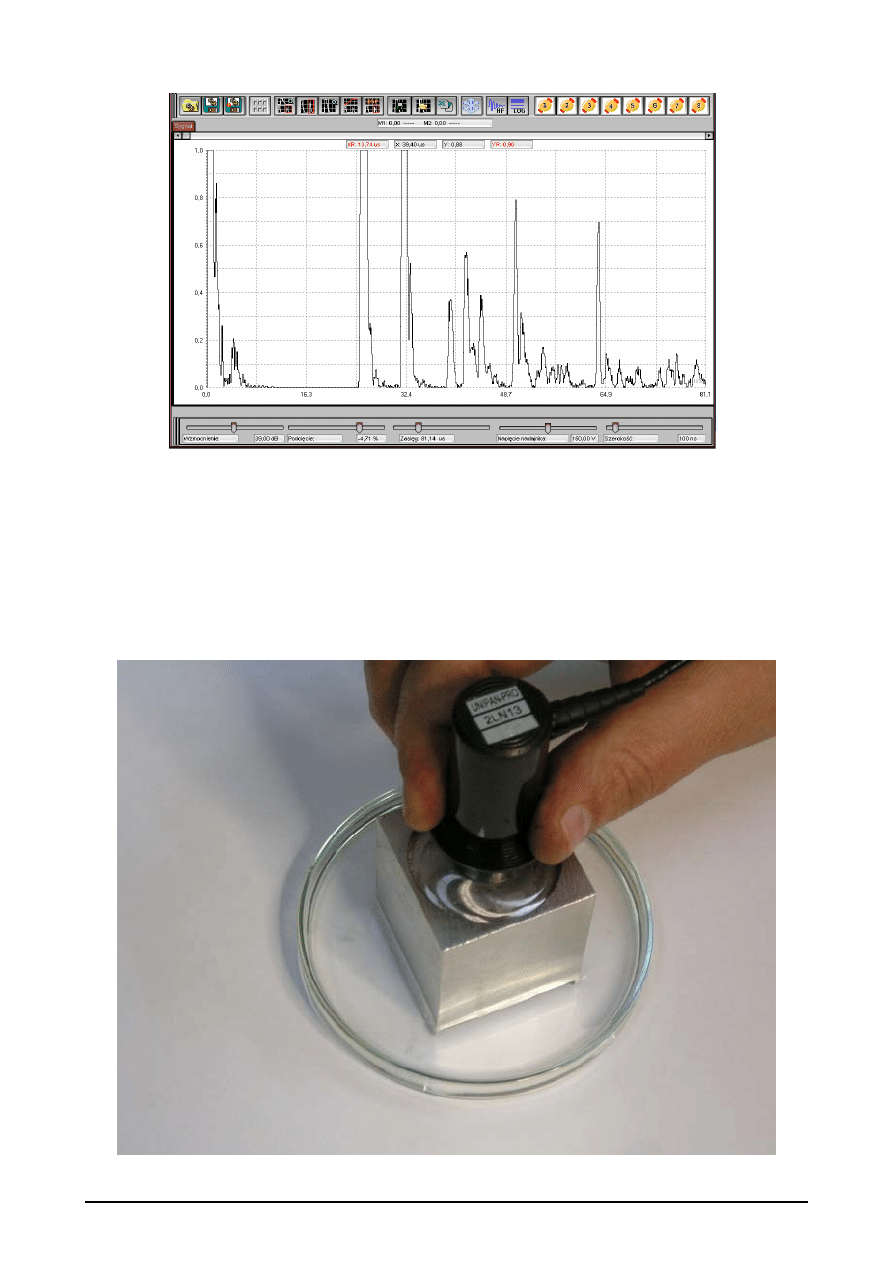
f
a: [ 0 - 1 – 0 ]; b: [ 0 - 2- 0 ] c: [ 0-1-3-1-0 ]; d: [ 0 – 2 – 3 – 1 – 0 ] ;
e: [ 0 – 2 – 3 – 2 – 0 ]; f: [ 0 – 1 – 0 – 1 – 0 ]; xx: [ 0 – ????????? – 0 ] ;
b
c
d
e
xx
a
9.4 0SZACOWANIE WSPÓŁCZYNNIKA ODBICIA FALI NA GRANICY OŚRODKÓW
Wybieramy 5 zestaw nastaw i oglądamy objaśnienia.
” Ultradźwięki ” Laboratorium
41
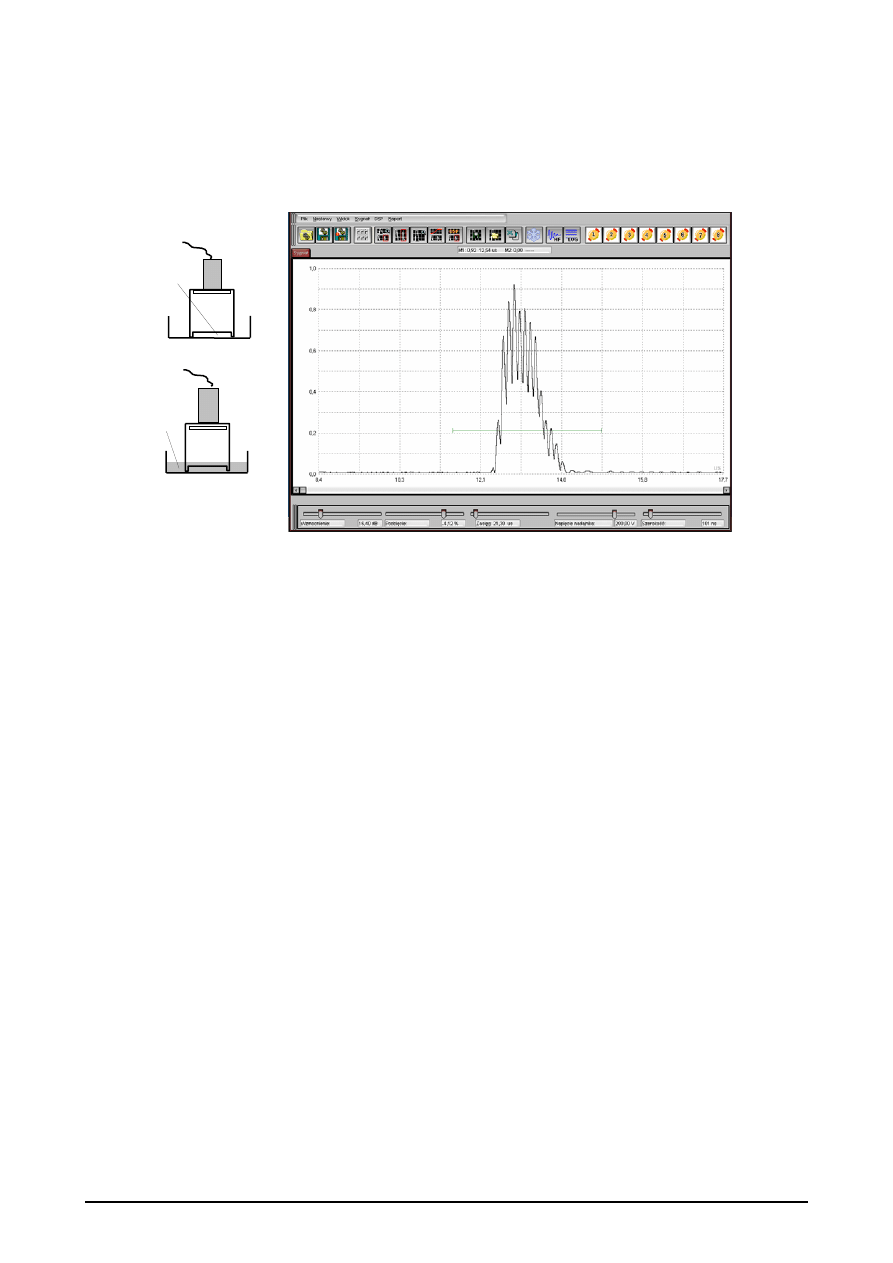
Upewnić się, że wybrane jest zobrazowanie LF sygnału w oknach i widok dwóch okien ( główne + lupa
). Wstawić ” klocek ” aluminiowy do pustego płytkiego naczynia. Do okrągłego wgłębienia klocka wlać kilka
kropel oliwki lub żelu i postawić głowicę 4 LN13 – głowicę obciążyć z góry małym ciężarkiem. Ramkę lupy
oraz monitor M1 ustawić tak, aby obejmowały pierwsze echo dna klocka, wybrać widok tylko okna lupy.
Wysokość echa dna H
1
jest proporcjonalna do współczynnika odbicia fali na granicy aluminium - po-
wietrze ( R
1
≈ -1 ) , a fala całkowicie odbije się i wróci w kierunku głowicy :
R
1
= (z
pow
– z
Al
)/(z
pow
+ z
Al.
)
ponieważ : z
pow
<<<z
Al.
to R
1
≈ -1 ,
zatem H
1
= k R
1
; gdzie : k – stała .
Jeśli ( nie ruszając głowicy !! ) do naczynia wlejemy wodę tak, aby dno próbki zanurzyło się, to część
fali wniknie do wody a reszta odbije się od granicy aluminium - woda i wróci w kierunku głowicy . Wysokość
echa dna spadnie do wartości H
2
i będzie proporcjonalna do współczynnika odbicia R
2
:
R
2
= ( z
wody
– z
Al
) / ( z
wody
+ z
Al.
)
ponieważ
z
wody
= 1.48x106 [kg/m2s] oraz
z
Al
. = 17.28x106 [kg/m2s] to :
R
2
≈ - 0.8573
oraz : H
2
= k R
2
Stosunek wysokości ech jest równy współczynnikowi odbicia fali na granicy aluminium-woda :
H
2
/ H
1
=
k R
2
/ k R
1
= - R
2
Spróbujmy zmierzyć doświadczalnie współczynnik R
2
i porównać wynik z obliczeniem teoretycznym
( R
2
≈ - 0.8573 ) . Do pomiaru wysokości ech użyjemy automatycznego pomiaru monitorowego.
−
Dla granicy aluminium - powietrze ( puste naczynie ) regulując wzmocnienie ustawiamy wysokość echa
na ok. 90% wysokości okna. Z okienka wyników monitorowych notujemy H
1
= ... ;
A
owietrze
p
wod
A
” Ultradźwięki ” Laboratorium
42
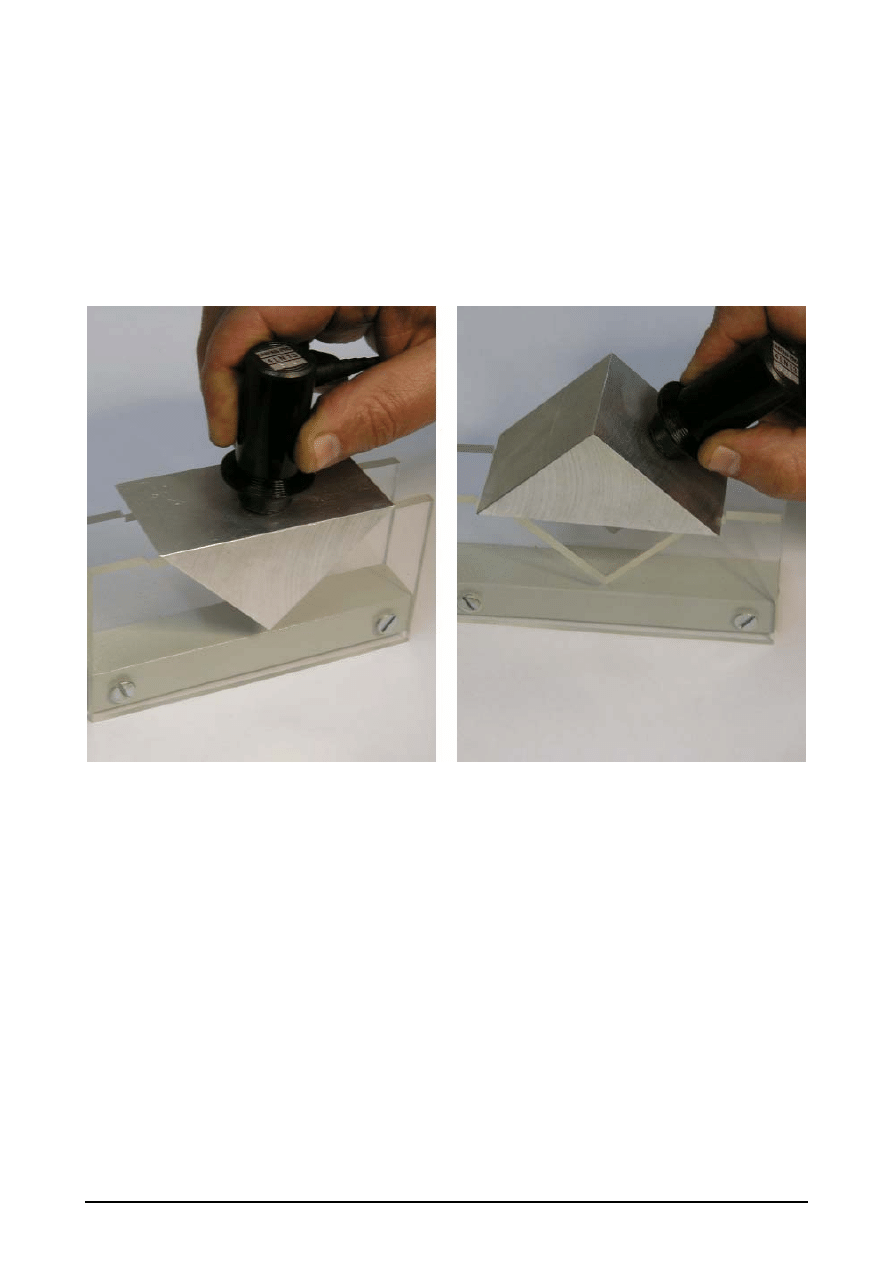
− Wlewamy
wodę tak, aby zanurzyć dno klocka ( uważać aby nie poruszyć głowicy !! ) - wysokość
echa nieco spadnie bo część fali przejdzie do wody a reszta wróci do głowicy. Notujemy H
2
= ... ;
− Obliczamy
współczynnik odbicia fali R
2
= - H2 / H1 .
9.5 OBSERWACJA ECH OD FAL PODŁUŻNYCH PADAJĄCYCH POD KĄTEM NA GRANICĘ
OŚRODKÓW
Wybieramy 6 zestaw nastaw i oglądamy objaśnienia.
Używając głowicy 4LN13 i specjalnej próbki aluminiowej w kształcie klina sprawdzimy, czy kąt padania
fali na granicę aluminium – powietrze jest równy kątowi odbicia. Oczywiście sprawdzenie to będzie tylko dla
jednego kąta ( 45° ) .
− Ustawiamy
głowicę na zwilżonej oliwką powierzchni ” 0 ” klina ( w środku ) . Pomimo że nie ma możli-
wości bezpośredniego odbicia fali od narożnika ( 90° ) na ekranie otrzymujemy wyraźne echo. Zatem
fala odbija się dwukrotnie pod kątem 45° i wraca do głowicy - ( droga 0-1-2-0 na rysunku poniżej ) .
Ustawić wysokość echa na ok. 90% wysokości okna przez dobór wzmocnienia i zmierzyć położenie
echa pomiarem monitorowym. Sprawdzić, czy położenie to jest równe połowie obliczonej geometrycz-
nie drogi 0-1-2-0 .
” Ultradźwięki ” Laboratorium
43
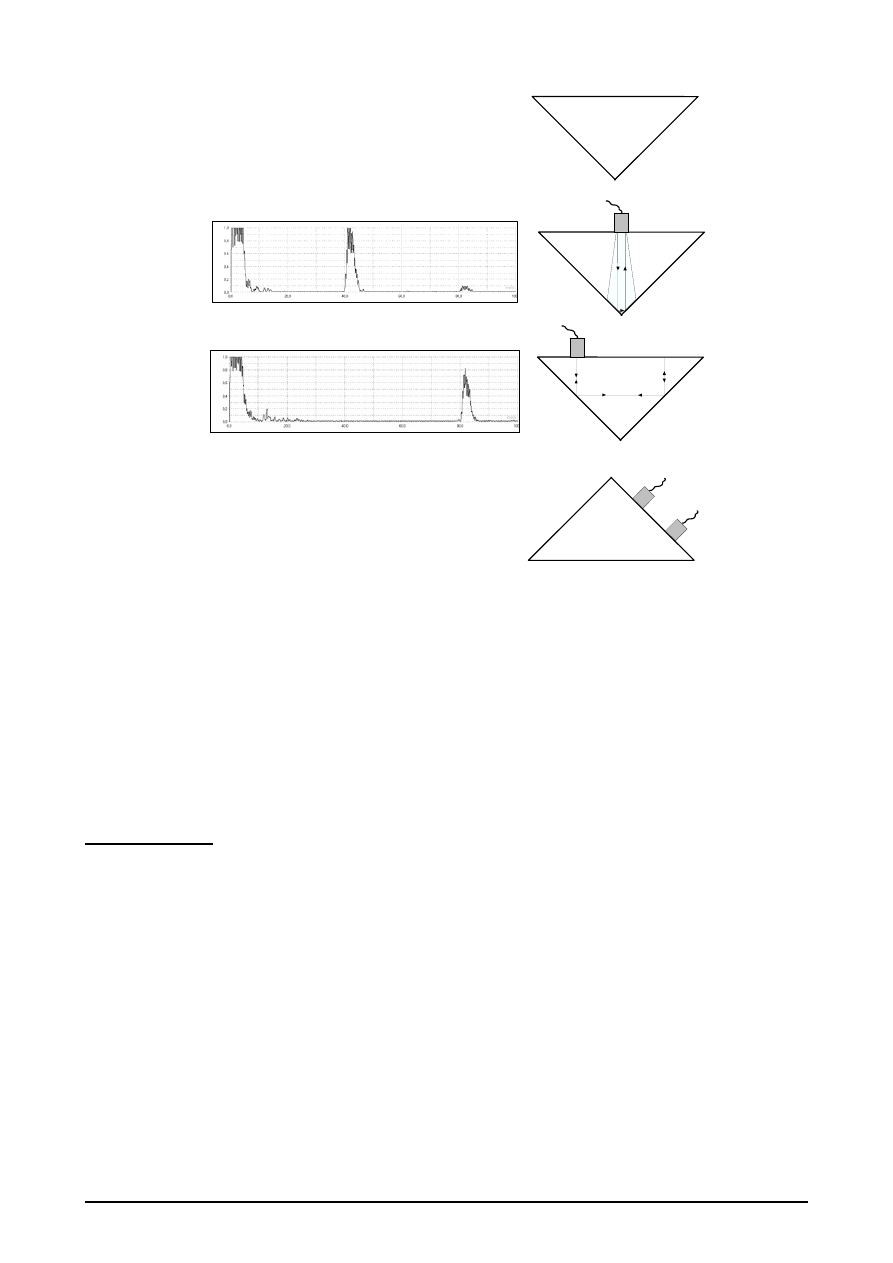
− Odsunąć głowicę w kierunku narożnika ( 45° ) na klinie. Zwiększamy wzmocnienie o kilka ( 8 ... 10 ) dB
. Obserwowane echo pochodzi od pięciokrotnego odbicia fali ( droga 0-1-2-0-2-1-0 ) . Analogicznie jak
poprzednio zmierzyć położenie echa i sprawdzić, czy położenie to jest równe połowie obliczonej geo-
metrycznie drogi 0-1-2-0-2-1-0 . Dlaczego przy przesuwaniu głowicy położenie echa nie zmienia się ?
− Odwrócić klin w podstawce i przyłożyć głowicę do zwilżonej oliwką płaszczyzny 1 albo 2 . Jaka będzie
droga fali w tym przypadku dla obserwowanego echa ?. Potwierdzić rozumowanie przez porównanie
położenia echa i połowy długości obliczonej geometrycznie drogi fali.
W sprawozdaniu :
Dla punktów 1 , 2 , 3 naszkicować drogę fali ultradźwiękowej w klinie. Porównać zmierzone położenie
echa z obliczoną geometrycznie długością drogi fali.
9.6 OBSERWACJA ECH OD FAL POPRZECZNYCH PRZY BADANIU GŁOWICĄ SKOŚNĄ
Wybieramy 7 zestaw nastaw i oglądamy objaśnienia.
klin aluminiowy
80 mm
45
90
45
0
2
powierzchni
1
0-1-2-
0-1-2-0
0-1-2-0-2-1-0
0-1-2-0-2-1-0
?
” Ultradźwięki ” Laboratorium
44
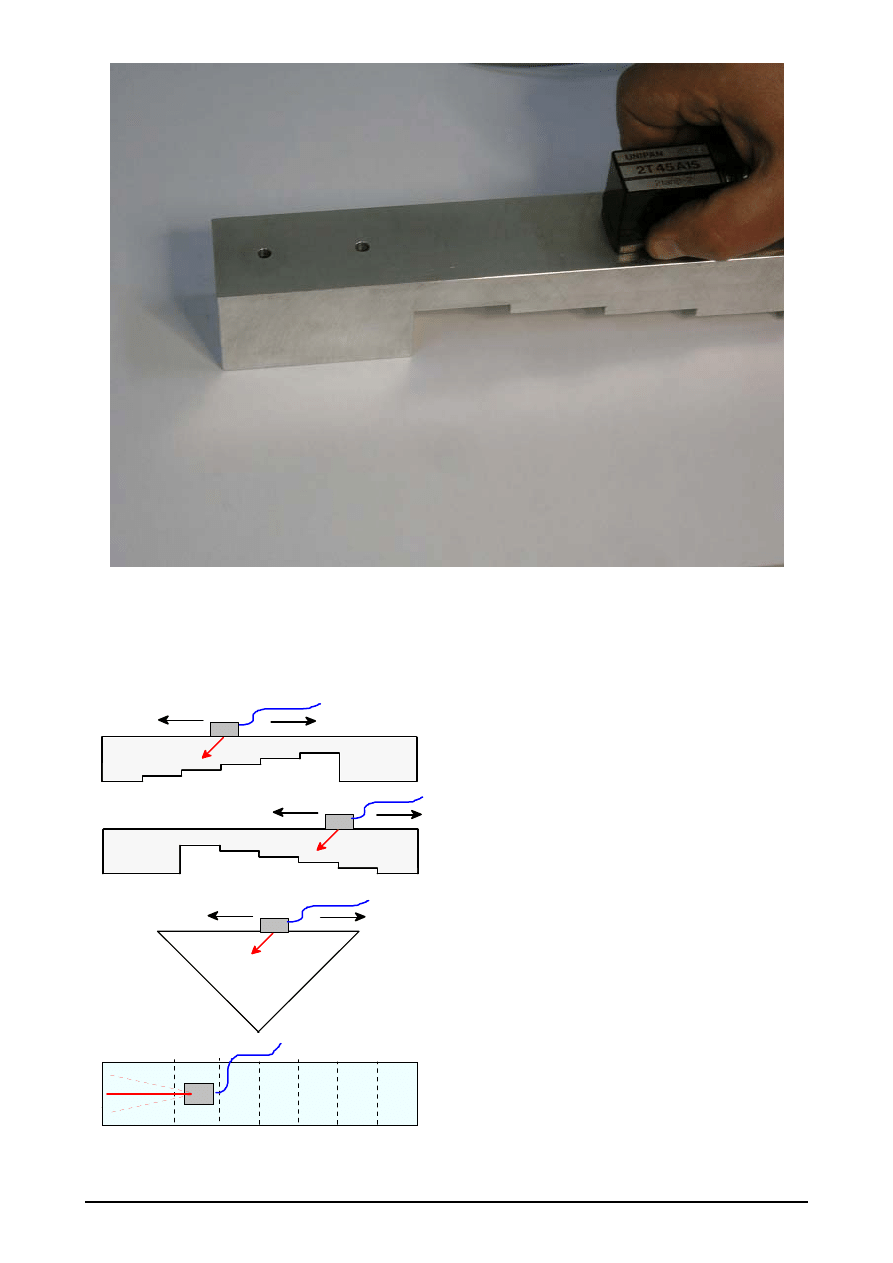
Podłączamy głowicę skośną 45
° ( np. głowica 2T45A15 firmy Unipan ) i ustawiamy na wzorcu schod-
kowym.
− Po
zwilżonej oliwką powierzchni prowadzimy
powoli głowicę obserwując echa na ekranie –
czynność wykonujemy dla obu kierunków pe-
netracji ( rys. a i b). Wyjaśnić drogę fal dla ob-
serwowanych ech ;
a
c
b
d
− Zaobserwować różnice w położeniu ech przy
włączonej i wyłączonej korekcji czasu głowicy
( opcja ” Nastawy - Skalowanie” ) ;
− Przy wybranym skalowaniu ” mm (Y) ” i włą-
czonej korekcji, sprawdzić czy poprawnie iden-
tyfikowana jest głębokość schodków ( naroży )
w pomiarach monitorowych ;
− Zaobserwować echa przy przesuwaniu głowi-
cy skośnej po powierzchni klina ( rys. c ) ;
− Zaobserwować zmianę wysokości echa przy
skręcaniu głowicy ( rys. d ) .
” Ultradźwięki ” Laboratorium
45
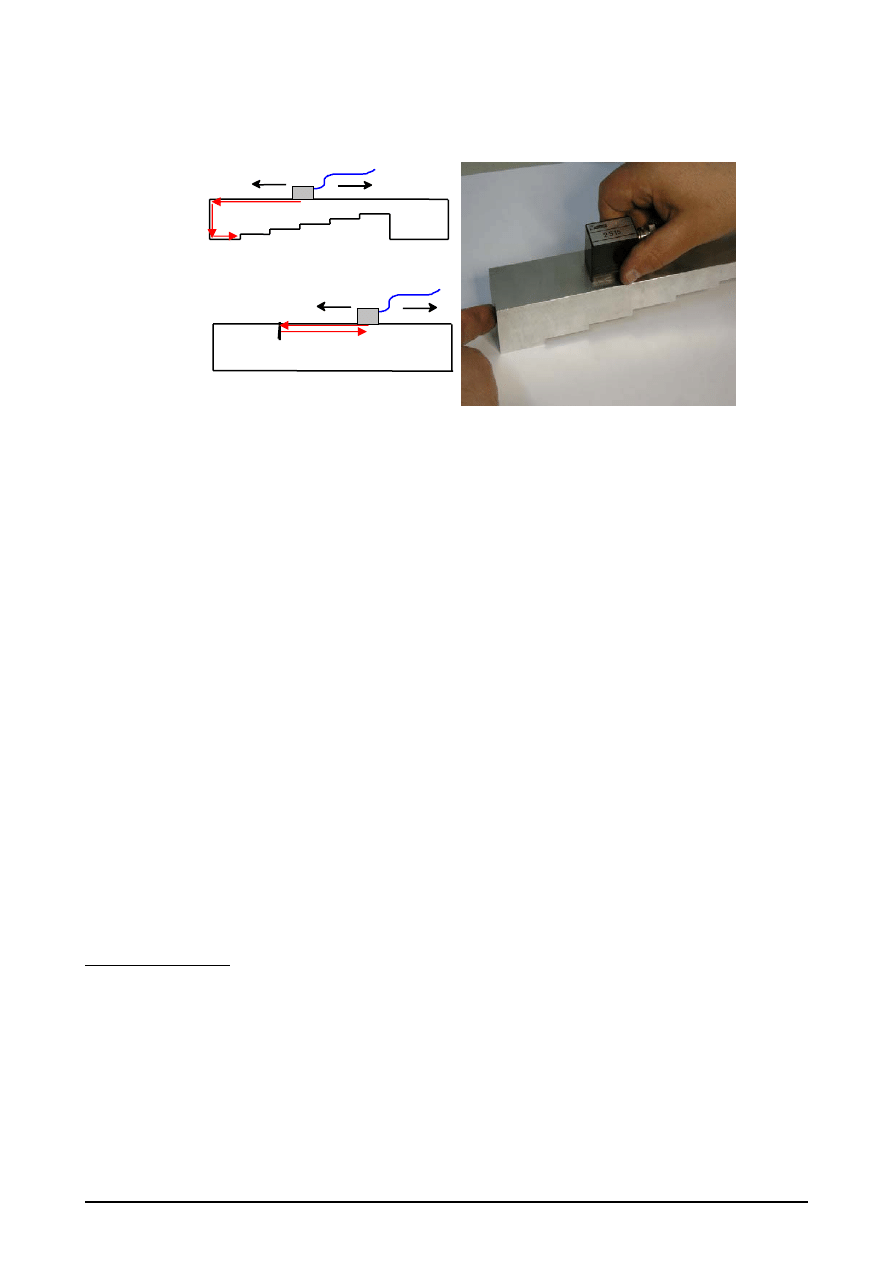
9.7 OBSERWACJA ECH OD FAL POWIERZCHNIOWYCH PRZY BADANIU GŁOWICĄ POWIERZCH-
NIOWĄ
Wybieramy 8 zestaw nastaw i oglądamy objaśnienia. Podłączamy głowicę fal powierzchniowych ( np.
głowica 2S15 firmy Unipan ) zwilżamy żelem tylko w jednym punkcie pod głowicą i ustawiamy na wzorcu
schodkowym jak na rysunku.
Fale powierzchniowe rozchodzą się tuż pod powierzchnią materiału wnikając na niewielka głębokość.
Każde ostre załamanie powierzchni oraz każda płaszczyzna prostopadła do kierunku propagacji fali (np.
pęknięcie powierzchniowe ) spowoduje jej odbicie i powrót do głowicy - dając echa krawędzi lub pęknięć
prostopadłych do powierzchni. Fakt, że fala biegnie po powierzchni powoduje, że jest tłumiona przez wszel-
kie przeszkody na tej powierzchni. Nawet kilka kropel wody ( żelu ) na drodze fali albo przyłożenie palca na
drodze fali spowoduje stłumienie ech. Możemy w ten sposób zidentyfikować, od których krawędzi pochodzą
echa, przesuwając palcem po powierzchni na drodze fali.
10. ZARYS OBSŁUGI PROGRAMU
Pełny opis obsługi programu i systematyczny przegląd wszystkich opcji programowych wraz z komenta-
rzem jest dostępny w instrukcji obsługi defektoskopu UMT-17. Poniżej podano tylko elementarne informacje
do obsługi programu.
Operowanie myszką
Program jest zaprojektowany tak, aby w większości przypadków dał się obsługiwać równolegle za po-
mocą myszki i klawiatury ( pewne operacje są dostępne przy użyciu tylko klawiatury albo tylko myszki ) .
Program rozróżnia trzy rodzaje akcji przeprowadzanych przez operatora za pomocą myszki :
− przesuwanie myszki - ruch jest odwzorowany na ekranie za pomocą ruchu tzw. kursora myszki ;
− ” kliknięcie " - akcja polegająca na szybkim wciśnięciu i zwolnieniu lewego klawisza myszki ;
− " ciągnięcie " - akcja polegająca na przesuwaniu myszki przy wciśniętym lewym klawiszu.
” Ultradźwięki ” Laboratorium
46
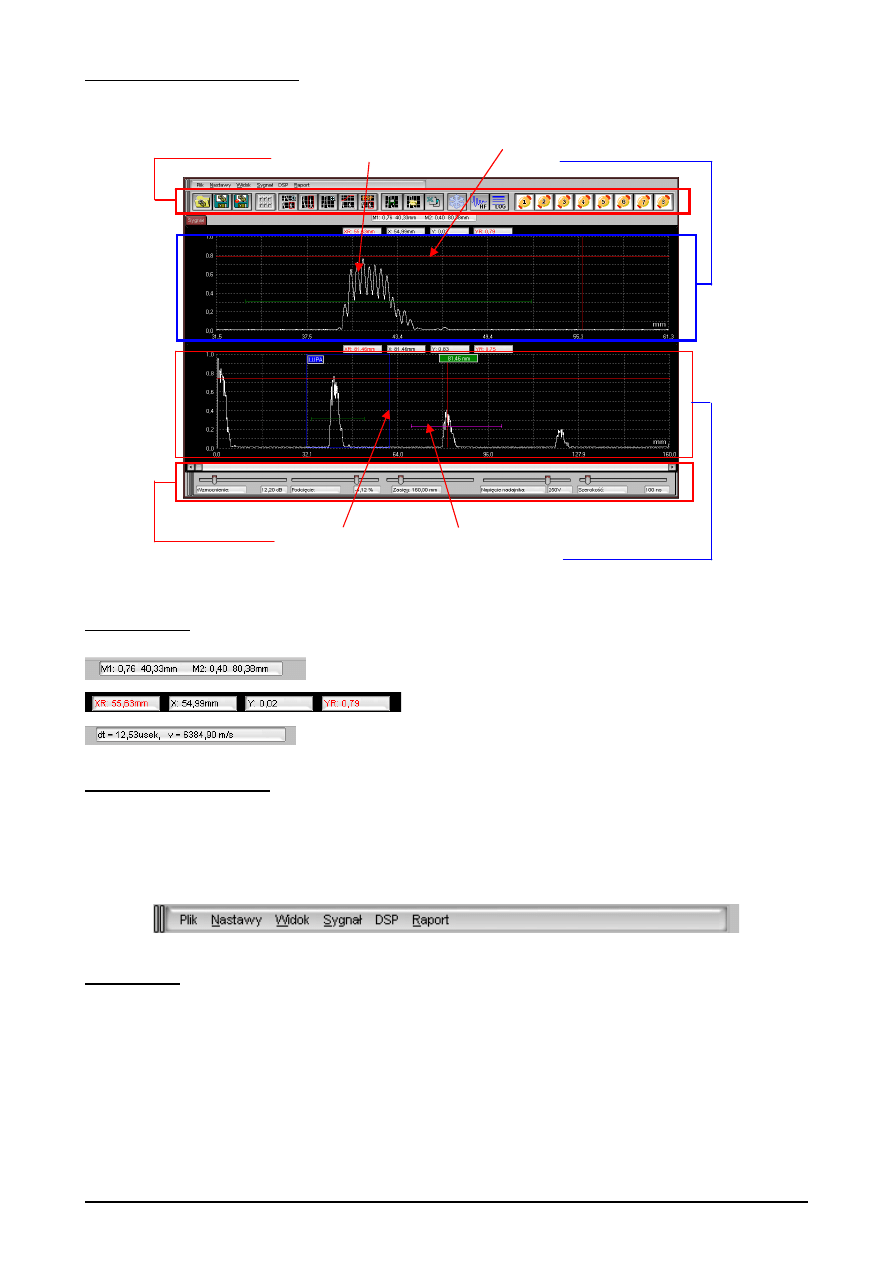
Elementy ekranu w programie
Pasek narzędzi
Okno sygnałowe lupy
Suwaki nastaw
Okno sygnałowe
główne
Linia odniesienia
Wykres sygnału
Ramka lupy
Bramka
monitora
Pola odczytów
- pole odczytów wyników pomiarów w bramkach monitorów
- pole odczytów kursorowych
- pole odczytów wyników operacji DSP (korelacja, widmo,..)
Struktura Menu głównego
Program zawiera hierarchiczną strukturę tzw. MENU , w której wyliczone jest większość operacji prze-
prowadzanych przez program. Dzięki niej można odnaleźć akcję, którą ma podjąć program i spowodować
aby ta akcja została wykonana. Na rysunku pokazano opcje z menu głównego. Każda z opcji jest rozwijana.
Menu lokalne
Kliknięcie prawym klawiszem myszki w obszarze okna sygnałowego otwiera menu lokalne do przepro-
wadzenia różnych ustawień okna i pewnych wybranych operacji ( np. Drukuj ) . Kliknięcie prawym klawiszem
myszki na przełączniku wyboru zestawu nastaw ( 1 ... 8 ) daje dostęp do objaśnień tego zestawu. Objaśnie-
nia są w postaci zdjęcia i opisu tekstowego – przykład na zdjęciu poniżej.
” Ultradźwięki ” Laboratorium
47
Pasek narzędzi
Wskazując kursorem przycisk paska narzędzi pojawia się podpowiedź do czego służy dany przycisk.
Na rysunku pokazano opis grup przycisków paska narzędzi.
Zapis/
Odczyt
definicji
Wybór widoku
Nastawy
Zapis/Odczyt
wyników
Wybór rodzaju
sygnału
Wybór zestawu nastaw 1..8
W ramach wczytanej definicji
Zmrożenie/
Odmrożenie
sygnału
Ekranowe obszary aktywne
Wiele parametrów nastaw sprzętowych defektoskopu oraz różnych parametrów liczbowych w progra-
mie możliwe są do ustawienia w dualny sposób : z klasycznych okien dialogowych dostępnych z menu albo
przez operacje na aktywnych elementach graficznych okien. Np, wzmocnienie defektoskopu można ustawić
z okienka dialogowego ( menu :” Nastawy – Nastawy - Nadajnik/Odbiornik – Wzmocnienie ” ) albo cią-
gnąc myszką aktywny element graficzny jakim jest suwak wzmocnienia. W programie dualny dostęp do pa-
rametrów jest wzajemnie uaktualniany, tzn. regulacja z okienka dialogowego uaktualnia położenie suwaka i
na odwrót.
Aktywne elementy graficzne są następujące :
−
suwaki – zmiana wartości przez ciągnięcie suwaka przy wciśniętym lewym klawiszu myszki. Dodatkowo
klikanie z lewej lub prawej strony uchwytu suwaka powoduje zmianę wartości z precyzyjnym skokiem.
− bramki monitorów - najeżdżając kursorem myszki na obszar monitora kursor zmienia postać. Przesu-
wanie całego monitora możliwe jest przez ciągnięcie myszką poziomej belki monitora. Zmiana początku
lub końca monitora realizowana jest przez ciągniecie myszką jego krańców. Podwójne klikniecie na
belce monitora otwiera dostęp do okienka dialogowego nastaw monitorów. Jeśli monitor jest poza ob-
szarem okna to można go sprowadzić z lokalnego menu wybierając” Przywołaj monitory ” ;
” Ultradźwięki ” Laboratorium
48
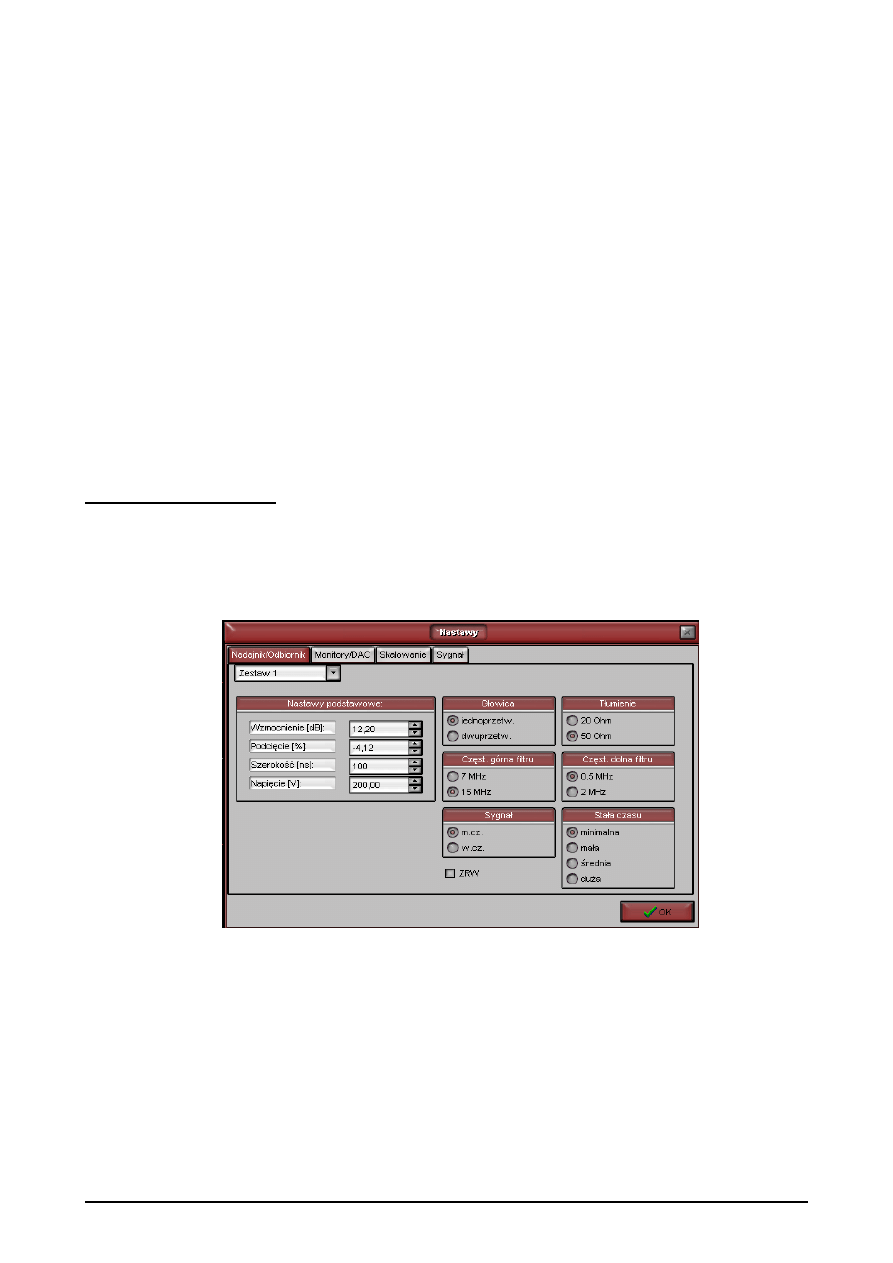
−
ramka lupy - ciągnąc myszką dowolną krawędź ramki lupy przemieszczamy ją w obszarze okna głów-
nego. Szerokość ramki lupy jest uzależniona od zasięgu i nie jest swobodnie regulowana. Ramka lupy
może być poza widzialnym obszarem okna – jeśli trzeba można ja sprowadzić do okna z lokalnego me-
nu wybierając ” Przywołaj ramki ” ;
−
ramki w opcji DSP” Korelacja ” – dwie ramki 1 i 2. Przesuwanie przez ciągnięcie górnej krawędzi ram-
ki, zmiana szerokości przez ciągnięcie pionowych krawędzi ramki. Szerokości obu ramek są równe,
zmiana w jednej uaktualnia szerokość w drugiej. Analogicznie jak wyżej, gdy ramki są poza obszarem
okna głównego można je sprowadzić z lokalnego menu wybierając” Przywołaj ramki ” ;
−
ramka w opcji DSP ” Transformata Fouriera ” albo ” Gęstość widmowa ” – jedna ramka DFT. Zmia-
na położenia i szerokości przez ciągnięcie krawędzi ramki jak dla korelacji.
−
linie odniesienia dla pomiarów kursorowych - zmiana położenia linii przez ciągniecie linii myszką. Jeśli
linie odniesienia są poza oknem to sprowadzamy je do okna z lokalnego menu ” Przywołaj linie od-
niesienia ” ;
−
skale poziome okien sygnałowych ( [mm] , [μs] , [MHz] ) – ciągnąc myszką za ” cyfry ” opisu skali uak-
tualniamy rozciąg liczbowy skali.
Okienka dialogowe nastaw
Opcja nastaw ma cztery zakładki.
Zakładka ” Nadajnik/Odbiornik ” grupuje wszystkie ustawienia związane z torem analogowym defek-
toskopu. Większość pól tej zakładki jest oczywista. Skomentujemy tylko niektóre :
−
Tłumienie – wybór rezystora tłumiącego elektrycznie głowicę ultradźwiękową. Mniejsza wartość rezy-
stora skraca szerokość impulsów ( ech ) poprawiając zdolność rozdzielczą, ale jednocześnie spada
amplituda sygnału z głowicy ;
−
Sygnał - to jest wybór rodzaju sygnału rysowanego w oknach. ” m.cz. ” odpowiada sygnałowi po detek-
cji natomiast ” w.cz. ” sygnałowi wielkiej częstotliwości. Dostęp do tego wyboru jest też z paska narzę-
dzi – przycisk ” LF – HF ”;
−
Częst. dolna i górna - wybór pasma przenoszenia odbiornika ;
” Ultradźwięki ” Laboratorium
49
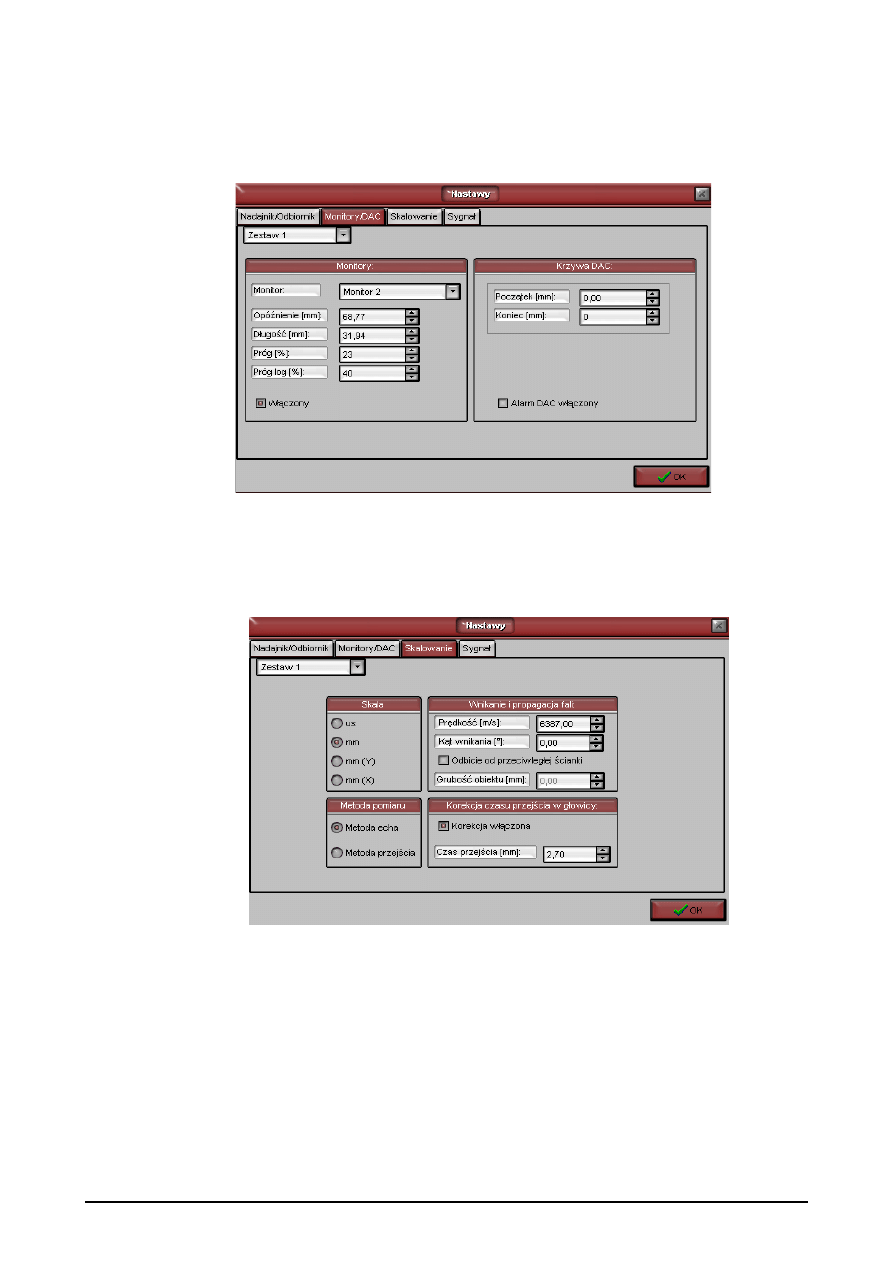
−
Stała czasu - stopień filtracji obwiedni dla sygnału po detekcji.
Zakładka ” Monitory/DAC ” grupuje ustawienia związane z położeniem bramek monitorów oraz okre-
śla zakres aktywności krzywej DAC ( początek i koniec ) .
Zakładka ” Skalowanie ” grupuje ustawienia związane z przeliczeniami ” czas - odległość ” .
− Pole ” Skala ” - określa w jakich jednostkach są opisane skale poziome okien sygnałowych ;
− Pole ” Korekcja czasu przejścia w głowicy ” – umożliwia wprowadzenie poprawki do skalowania
okien tak, aby wynik pomiarów odpowiadał rzeczywistym wymiarom badanego obiektu.
Zakładka ” Sygnał ” grupuje ustawienia związane z zakresem obserwacji w oknie głównym i oknie lupy
oraz sposobem akwizycji sygnału.
” Ultradźwięki ” Laboratorium
50
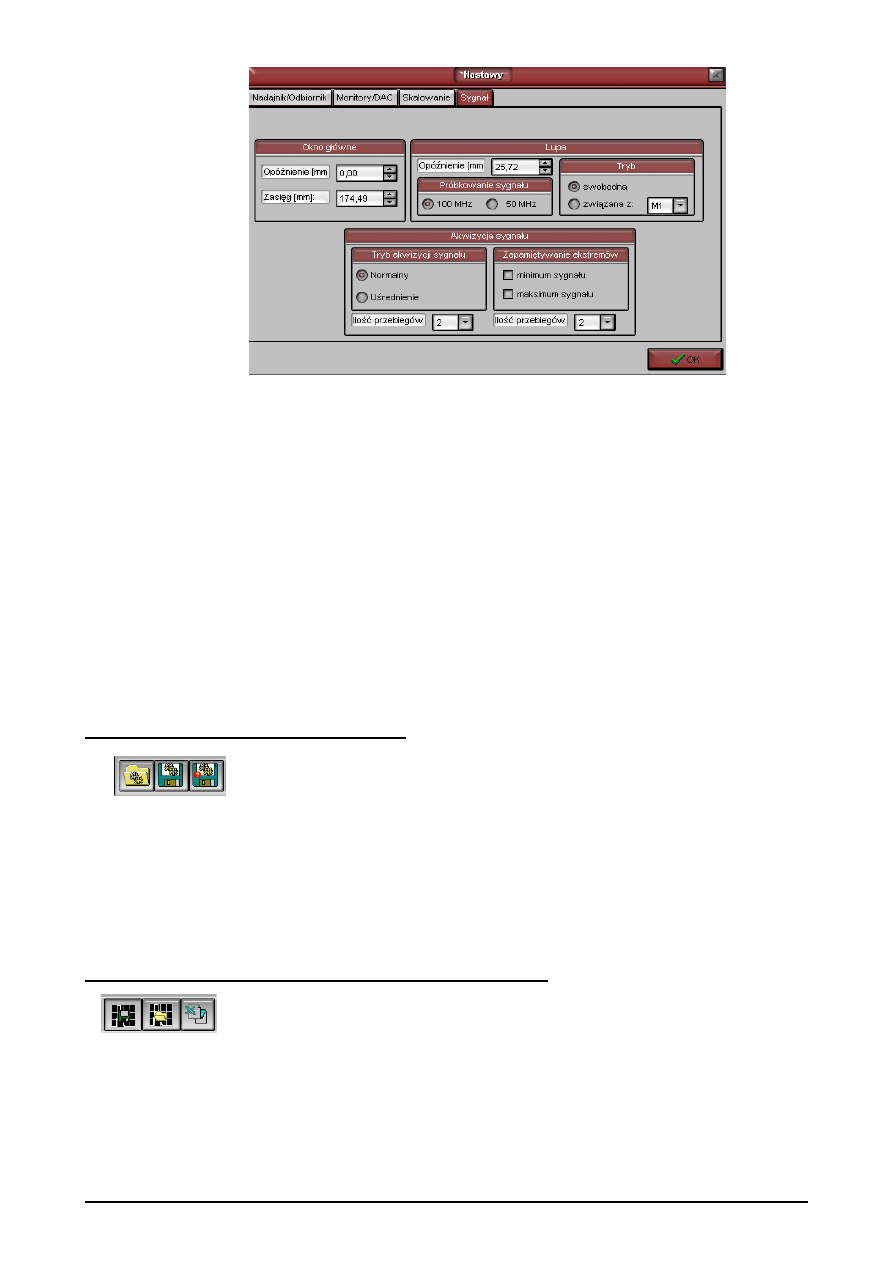
− Pole ” Okno główne ” – umożliwia wprowadzenie zasięgu obserwacji i opóźnienia zobrazowania. Do-
stęp do tych parametrów jest też możliwy przez manipulacje suwakiem zasięgu i paskiem przewijania
okna głównego.
− Pole ” Lupa ” – określa położenie ramki lupy w oknie głównym. Tryb lupy określa z czym związany jest
początek ramki lupy. W trybie swobodnym ramkę przesuwa się ciągnąc myszką jej krawędź albo wpisu-
jąc opóźnienie lupy. Można też związać początek ramki lupy z wybraną bramką monitora.
− Pole ” Akwizycja sygnału ” – umożliwia włączenie uśredniania sygnałów ultradźwiękowych co czę-
ściowo eliminuje szumy i zakłócenia. Jest to szczególnie użyteczne przy pracy z małymi sygnałami ( np.
małe wady, duże tłumienie fal w materiale ) gdzie trzeba używać dużych wartości wzmocnień i wtedy
istotne są szumy własne wzmacniacza w odbiorniku.
Operacje wczytywania i zapisywania definicji
Wszystkie nastawy sprzętowe defektoskopu oraz parametry liczbowe dla programu
dotyczące konkretnego zadania pomiarowego są zgrupowane w jednym zbiorze i
przechowywane w postaci tzw. definicji pomiarowej. Definicja przechowywana jest w
lokalnej bazie danych programu. Zapisując definicję zapamiętujemy te wszystkie ustawienia, wczytując defi-
nicję wprowadzamy do defektoskopu i programu ustawienia zrobione wcześniej. Definicja identyfikowana
jest przez unikalną nazwę. Trzy przyciski na pasku narzędzi dają dostęp do okien dialogowych zarządzania
definicjami - z obsługą typową jak w środowisku Windows.
Operacje zapisu , przeglądania i eksportu wyników pomiarowych
Program ma wbudowaną wewnętrzną bazę danych do zapisu okien sygnałowych z
wynikami pomiarów, oraz przeglądarkę do analizy tych wyników. Trzy przyciski na pa-
sku narzędzi umożliwiają dostęp do tych opcji – obsługa jest typowa jak dla programów w środowisku Win-
dows.
” Ultradźwięki ” Laboratorium
51
Document Outline
Wyszukiwarka
Podobne podstrony:
ĆW.3.PKT.2, Skrypty, UR - materiały ze studiów, studia, Hydrologia-sylwek, CW3
ćw.8, Fizyka, Skrypt do Laborek
ćw.3, Fizyka, Skrypt do Laborek
CW 42 43, POLITECHNIKA WROC˙AWSKA
cw 42
ćw.7, Fizyka, Skrypt do Laborek
ćw.5, Fizyka, Skrypt do Laborek
ćw.1, Fizyka, Skrypt do Laborek
Skrypt Ultradzwieki, Fizjoterapia, fizykoterapia, Fizykoterapia
Ćw 1-dobre, Skrypty, PK - materiały ze studiów, I stopień, SEMESTR 4, Wytrzymałość Materiałów, od Ol
Ćwiczenie P42, Ćw 42 - moje, Celem przeprowadzanego doświadczenia jest wyznaczenie oporu elektryczne
prawo karne cw i wyklady skrypt, I MIEJSCE
konspekt ćw 42
ćw.4, Fizyka, Skrypt do Laborek
ćw 42
Skrypt Ultradzwieki, DODATKOWE, WSM, fizyko
43, CW 42 ~2, POLITECHNIKA WROC˙AWSKA
cw 42
więcej podobnych podstron