„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Artur Bielawski
Jerzy Bulski
Analiza działania podstawowych maszyn i urządzeń
elektrycznych 725[02].O1.05
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2006

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Anna Górska
mgr inż. Beata Miętus
Opracowanie redakcyjne:
mgr inż. Artur Bielawski
Konsultacja:
mgr inż. Andrzej Zych
Korekta:
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 725[02].O1.05
Analiza działania podstawowych maszyn i urządzeń elektrycznych zawartej w modułowym
programie nauczania dla zawodu monter sieci i urządzeń telekomunikacyjnych.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2006

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Transformator jednofazowy
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
10
4.1.3. Ćwiczenia
10
4.1.4. Sprawdzian postępów
13
4.2. Maszyny prądu stałego
14
4.2.1. Materiał nauczania
14
4.2.2. Pytania sprawdzające
16
4.2.3. Ćwiczenia
17
4.2.4. Sprawdzian postępów
18
4.3. Maszyny prądu zmiennego
19
4.3.1. Materiał nauczania
19
4.3.2. Pytania sprawdzające
22
4.3.3. Ćwiczenia
22
4.3.4. Sprawdzian postępów
25
4.4. Mikrosilniki
26
4.4.1. Materiał nauczania
26
4.4.2. Pytania sprawdzające
30
4.4.3. Ćwiczenia
30
4.4.4. Sprawdzian postępów
31
4.5. Sterowniki
32
4.5.1. Materiał nauczania
32
4.5.2. Pytania sprawdzające
39
4.5.3. Ćwiczenia
39
4.5.4. Sprawdzian postępów
40
4.6. Urządzenia radiowe i telewizyjne
41
4.6.1. Materiał nauczania
41
4.6.2. Pytania sprawdzające
46
4.6.3. Ćwiczenia
46
4.6.4. Sprawdzian postępów
47
5. Sprawdzian osiągnięć
48
6. Literatura
53

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy o maszynach i urządzeniach
elektrycznych, ich budowie, zasadzie działania, parametrach oraz zastosowaniu.
W poradniku zamieszczono:
−
wykaz literatury, z jakiej możesz korzystać podczas nauki,
−
wykaz umiejętności, jakie powinieneś mieć przed przystąpieniem do nauki wybranym
przez Ciebie zawodzie,
−
wykaz umiejętności, jakie ukształtujesz podczas pracy z tym poradnikiem,
−
materiał nauczania- czyli wiadomości dotyczące obwodów prądu stałego,
−
zestawy pytań, które pomogą Ci sprawdzić, czy opanowałeś podane treści o obwodach
prądu stałego,
−
ćwiczenia, które umożliwią Ci nabycie umiejętności praktycznych,
−
sprawdzian postępów.
W materiale nauczania zostały omówione zagadnienia dotyczące transformatora
jednofazowego, maszyn prądu stałego, maszyny prądu zmiennego, mikrosilników,
sterowników, urządzeń radiowych i telewizyjnych.
Z rozdziałem Pytania sprawdzające możesz zapoznać się:
−
przed przystąpieniem do rozdziału Materiał naucznia (poznasz przy okazji wymagania
wynikające z potrzeb zawodu), a po przyswojeniu wskazanych treści, odpowiadając na te
pytania sprawdzisz stan swojej gotowości do wykonania ćwiczeń,
−
po zapoznaniu się z rozdziałem Materiał naucznia, aby sprawdzić stan swojej wiedzy,
która będzie Ci potrzebna do wykonania ćwiczeń.
Kolejnym etapem poznawania maszyn i urządzeń elektrycznych będzie wykonanie
ćwiczeń, których celem jest uzupełnienie i utrwalenie informacji o poznanych zagadnieniach.
Wykonując ćwiczenia przedstawione w poradniku lub zaproponowane przez nauczyciela,
poznasz podstawowe właściwości wyżej wymienionych maszyn i urządzeń.
Po wykonaniu ćwiczeń, sprawdź poziom swoich postępów rozwiązując test Sprawdzian
postępów, zamieszczony po ćwiczeniach. W tym celu:
−
przeczytaj uważnie pytania,
−
podaj odpowiedź wstawiając X w odpowiednie miejsce (w miejscu TAK jeżeli Twoja
odpowiedz jest prawidłowa, w miejscu NIE jeżeli odpowiedz na pytanie jest negatywna).
Odpowiedzi NIE wskazują na luki w Twojej wiedzy, informują Cię również, jakiego
materiału dobrze nie poznałeś. Oznacza to powrót do treści, które nie są dostatecznie
opanowane.
Poznanie przez Ciebie wszystkich lub określonej części wiadomości będzie stanowiło dla
nauczyciela podstawę przeprowadzenia sprawdzianu poziomu przyswojonych wiadomości
i ukształtowanych umiejętności. Zestaw zadań testowych zamieszczony jest w rozdziale 5,
obejmujący także:
−
instrukcję, w której omówiono tok postępowania podczas przeprowadzania sprawdzianu,
−
przykładową kartę odpowiedzi, w której, w przeznaczonych miejscach wpisz odpowiedzi
na pytania; będzie to stanowić dla Ciebie trening przed sprawdzianem zaplanowanym
przez nauczyciela.
Bezpieczeństowo i higiena pracy
W czasie pobytu na pracowni musisz przestrzegać regulaminów, przepisów
bezpieczeństawa i higieny pracy oraz instrukcji przeciwpożarowych, wynikających z rodzaju
wykonywanych prac. Przepisy te pozanasz podczas trwania nauki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych w module pomiar parametrów elementów i układów
elektronicznych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
–
rozróżniać podstawowe wielkości elektryczne,
–
stosować podstawowe jednostki wielkości elektrycznych w układzie SI,
–
interpretować przedrostki przed nazwami jednostek,
–
przeliczać jednostki,
–
stosować podstawowe prawa elektrotechniki,
–
interpretować podstawowe zjawiska z zakresu elektrotechniki występujące w obwodach
prądu stałego,
–
rozróżniać typy oporników,
–
obliczać rezystancję zastępczą oporników połączonych równolegle, szeregowo
i w sposób mieszany,
–
rozpoznawać symbole źródeł napięcia i prądu stałego,
–
analizować proste układy prądu stałego,
–
obliczać i oszacować podstawowe wielkości elektryczne w układach prądu stałego,
–
oceniać wpływ zmian rezystancji na napięcie, prąd, moc,
–
określać warunki dopasowania odbiornika do źródła,
–
obsługiwać woltomierz, amperomierz prądu stałego, omomierz oraz miernik uniwersalny,
–
organizować stanowisko pomiarowe,
–
łączyć układy prądu stałego zgodnie ze schematem,
–
wykonywać pomiary podstawowych wielkości elektrycznych w układach prądu stałego,
–
przewidywać zagrożenia dla życia i zdrowia w czasie realizacji ćwiczeń,
–
rozróżniać parametry charakteryzujące przebieg prądu przemiennego,
–
rozróżniać różne typy kondensatorów i cewek,
–
analizować proste układy prądu przemiennego,
–
obliczać i oszacować podstawowe wielkości elektryczne w układach prądu
przemiennego,
–
dobierać przyrządy pomiarowe do pomiaru wielkości elektrycznych w obwodach prądu
przemiennego,
–
łączyć układy do pomiaru podstawowych wielkości w układach prądu przemiennego,
–
wykonywać pomiary podstawowych wielkości elektrycznych w układach prądu
przemiennego,
–
analizować i interpretować wyniki pomiarów w układach prądu stałego i zmiennego oraz
wyciągać wnioski praktyczne,
–
przedstawiać wyniki w formie tabeli i wykresu,
–
odczytywać informację z tabeli lub wykresu,
–
demonstrować efekty wykonywanych pomiarów,
–
rozpoznawać na podstawie symbolu graficznego i wyglądu podstawowe elementy
elektroniczne,
–
wskazywać podstawowe zastosowania elementów i układów elektronicznych,
–
analizować działanie prostych układów analogowych na podstawie schematów ideowych,
–
rozpoznawać na schematach ideowych bloki funkcjonalne: zasilacze, generatory, układy
wzmacniające,
–
analizować działanie układów analogowych na podstawie schematów blokowych,
–
korzystać z katalogów układów elektronicznych,
–
przewidywać zagrożenia dla życia i zdrowia w czasie realizacji ćwiczeń,
–
udzielać pierwszej pomocy w przypadkach porażenia prądem elektrycznym,
–
stosować procedurę postępowania w sytuacji zagrożeń,
–
stosować przepisy bezpieczeństwa i higieny pracy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
rozróżnić funkcje i zastosowanie podstawowych maszyn i urządzeń elektrycznych,
−
zinterpretować podstawowe zjawiska zachodzące w maszynach i urządzeniach
elektrycznych,
−
scharakteryzować podstawowe maszyny i urządzenia elektryczn,e
−
rozpoznać na schematach ideowych podstawowe bloki funkcjonalne urządzeń
elektrycznych,
−
rozpoznać elementy i podzespoły maszyn i urządzeń na podstawie wyglądu,
−
zidentyfikować zaciski maszyn elektrycznych,
−
zinterpretować zapisy na tabliczkach znamionowych,
−
sporządzić wykaz przyrządów pomiarowych,
−
przygotować stanowisko pomiarowe,
−
przeanalizować i zinterpretować wyniki pomiarów oraz wyciągać wnioski praktyczne,
−
zademonstrować poprawność wykonywania pomiarów,
−
uporządkować stanowisko pomiarowe,
−
obsłużyć urządzenia na podstawie instrukcji,
−
obsłużyć maszyny i urządzenia elektryczne z zachowaniem zasad BHP.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Transformator jednofazowy
4.1.1. Materiał nauczania
Maszyna
elektryczna
jest
to
urządzenie
działające
na
zasadzie
indukcji
elektromagnetycznej i służące do przetwarzania energii.
Do tak zdefiniowanych maszyn elektrycznych nie zalicza się maszyn działających na zasadzie
indukcji elektrostatycznej. Wyróżnia się dwie zasadnicze grupy maszyn:
transformator, czyli urządzenie statyczne (bez udziału ruchu mechanicznego)działające na
zasadzie indukcji elektromagnetycznej i służące do przetwarzania energii;
maszyna elektryczna wirująca, czyli urządzenie działające na zasadzie indukcji
elektromagnetycznej
i
służące
do
przetwarzania
energii
przy
udziale
ruchu
mechanicznego.
W tej części materiału zajmijmy się tylko pierwszą z nich i przedstawiamy dwie definicje:
−
Transformator przetwarza energię elektryczną na energię elektryczną o innych (na ogół)
parametrach, np. o innym napięciu, innym prądzie itp.
−
Transformator jest urządzeniem elektroenergetycznym przetwarzającym energię
elektryczną za pośrednictwem pola magnetycznego bez udziału energii mechanicznej.
Przy przetwarzaniu uzyskuje się w nim zmianę wartości napięcia i prądu przy stałej
wartości częstotliwości.
Podstawowe elementy transformatora to:
1. rdzeń wykonany z blach stalowych z dodatkiem krzemu,
2. uzwojenia wykonane z przewodów miedzianych lub aluminiowych:
−
uzwojenie pierwotne, do którego doprowadzana jest energia,
−
uzwojenie wtórne zasilające odbiorniki.
Transformator, którego rdzeń i uzwojenia zanurzone są w oleju znajdującym się w kadzi,
nazywa się transformatorem olejowym. Olej w transformatorze spełnia rolę czynnika
chłodzącego i wzmacniającego izolację elektryczną. Transformatory bez oleju, chłodzone
powietrzem, nazywane są transformatorami suchymi.
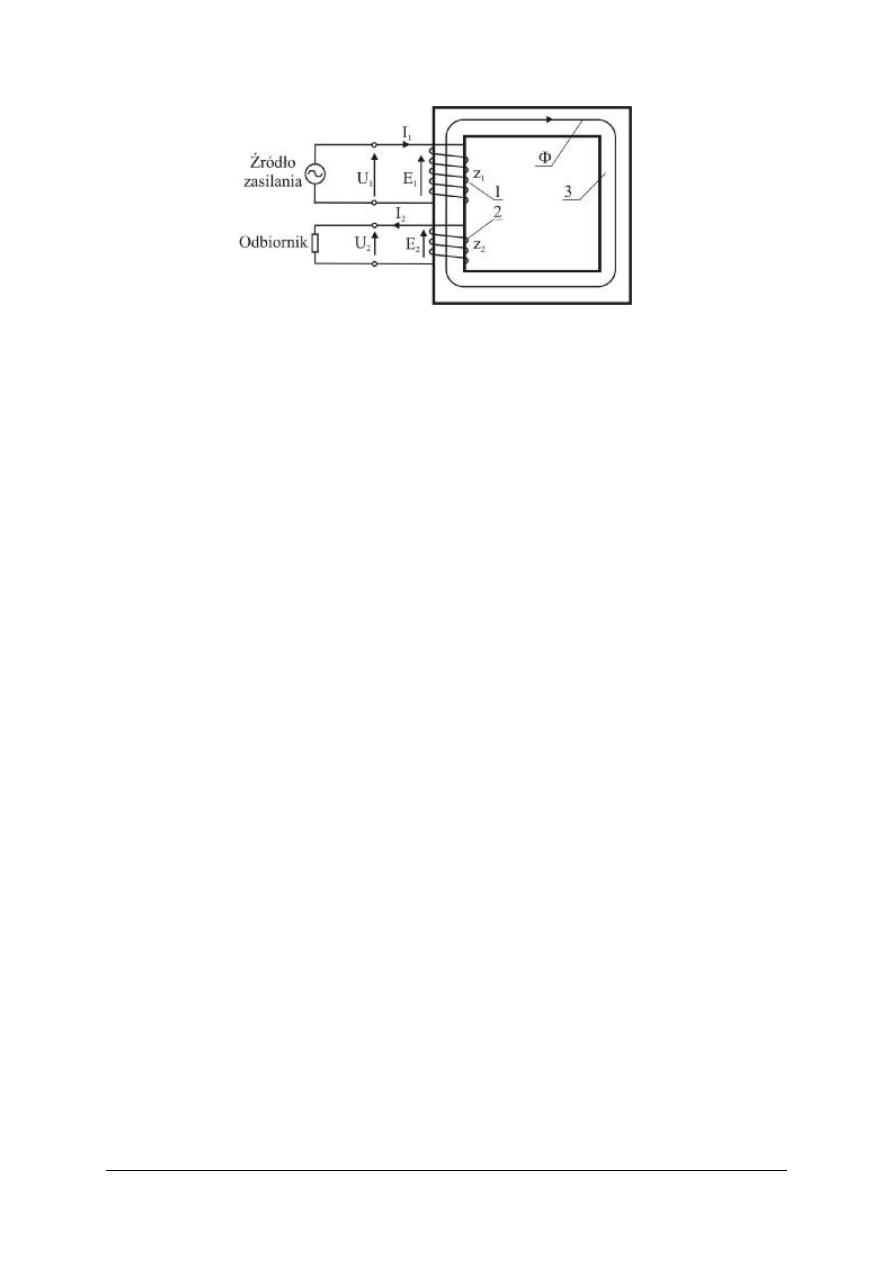
Szkic poglądowy najprostszego - bo jednofazowego, dwuuzwojeniowego transformatora
przedstawiono na rys.1
Rdzeń
magnetyczny
transformatora
wykonywany
jest
z
reguły
z
blachy
transformatorowej o grubości 0,3-0,5mm. Do celów specjalnych wykonuje się
transformatory bez rdzenia stalowego, tak zwane transformatory powietrzne (na przykład
transformatory wielkiej częstotliwości). Rdzeń powinien być składany z blach wzajemnie od
siebie odizolowanych cienkimi (rzędu 5% do 10% grubości blachy) warstwami papieru,
lakieru lub szkła wodnego, aby nie dopuścić do nadmiernego grzania się wskutek
powstawania prądów wirowych; przy rdzeniu litym (pełnym), wykonanym z tego samego
gatunku materiału co blacha,- praca transformatora byłaby w ogóle niemożliwa. Rdzeń
magnetyczny transformatora nie zawiera żadnych części ruchomych (wirujących), ponieważ
transformator nie przetwarza energii mechanicznej.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Rys. 1. Transformator jednofazowy, dwuuzwojeniowy 1-uzwojenie pierwotne, 2- uzwojenie wtórne, 3 – rdzeń.
Na rdzeniu jednofazowego transformatora nawinięte są dwa uzwojenia nie połączone ze
sobą galwanicznie. Jedno z nich (uzwojenie 1 na rys.1) zasilane jest ze źródła napięcia
zmiennego
1
U i dlatego nazywa się uzwojeniem pierwotnym. Prąd zmienny
1
I płynący
w tym uzwojeniu wytwarza zmienne pole magnetyczne
Φ
, które sprzęgając się z drugim
uzwojeniem (uzwojenie 2 na rys.1) indukuje w nim napięcie
1
U . Jeżeli do zacisków tego
uzwojenia przyłączymy odbiorniki, to w zamkniętym obwodzie tego uzwojenia popłynie prąd
2
I . Uzwojenie to nazywamy uzwojeniem wtórnym. W ten sposób przetwarza się energia
elektryczna prądu zmiennego w energię elektryczną prądu zmiennego o innej (lub
w szczególnym przypadku tej samej) wartości napięć i prądów. Pośrednikiem w tym
przetwarzaniu jest zmienne pole magnetyczne. W stanie jałowym - to jest wtedy, gdy do
zacisków uzwojenia wtórnego nie są przyłączone żadne odbiorniki - strumień magnetyczny
jest wytwarzany jedynie przez prąd płynący w uzwojeniu pierwotnym, nazywany w tych
warunkach prądem stanu jałowego
O
I .
Transformator może pracować jedynie przy zasilaniu ze źródła napięcia (prądu)
zmiennego, albowiem jedynie zmienny strumień może zaindukować w uzwojeniu wtórnym
napięcie. Gdybyśmy (przez pomyłkę lub dla próby) przyłączyli transformator do źródła
napięcia (prądu) stałego, wówczas proces transformowania nie wystąpiłby: powstający w tych
warunkach stały strumień magnetyczny nie indukuje bowiem napięcia w uzwojeniu wtórnym.
Podstawowe zależności ilościowe dla pracy transformatora
Jeżeli w rdzeniu transformatora występuje zmienny strumień Φ, którego wszystkie linie
sprzęgają się z każdym zwojem zarówno uzwojenia pierwotnego jak i wtórnego, to w każdym
zwoju obu uzwojeń indukuje się taka sama (siła elektromotoryczna) SEM, którą oznaczamy
literą E .
Jeżeli ograniczymy się do rozpatrzenia jedynie sinusoidalnych przebiegów wszystkich
wielkości (U , I ,
Φ
), to skuteczną wartość SEM indukowanej w każdym zwoju określa
wzór:
Φ
⋅
⋅
=
f
E
44
,
4
w którym:
E siła elektromotoryczna,
f - częstotliwość przebiegu,
Φ
- strumień zmienny.
Jeżeli uzwojenie pierwotne składa się z z
1
szeregowo połączonych zwojów to indukującą
się w nim SEM określa zależność:
Φ
⋅
⋅
⋅
=
f
z
E
1
1
44
,
4

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
i analogicznie w uzwojeniu wtórnym o z
2
zwojach
Φ
⋅
⋅
⋅
=
f
z
E
2
2
44
,
4
Jeżeli pominiemy spadki napięć na opornościach czynnych uzwojeń i opornościach
biernych rozproszenia to możemy przyjąć, że napięcia na zaciskach uzwojeń są równe
indukowanym SEM
Φ
⋅
⋅
⋅
=
≈
f
z
E
U
1
1
1
44
,
4
Φ
⋅
⋅
⋅
=
≈
f
z
E
U
2
2
2
44
,
4
Porównując te napięcia, zauważymy, że stosunek ich zależy od stosunku liczby zwojów.
2
1
2
1
U
U
z
z
≈
Przekładnia
Wielkością charakteryzująca transformator (określona wg PN-56/E-06040 § 1.3.28) jako
stosunek napięć występujących jednocześnie na zaciskach transformatora w stanie jałowym
nazywany przekładnią i oznaczany literą
ϑ .
1
2
2
1
2
1
I
I
z
z
U
U
=
=
=
ϑ
Wynika stąd, że w uzwojeniu wyższego napięcia (tak zwanego górnego napięcia) płynie
prąd mniejszy, podczas gdy w uzwojeniu niższego (dolnego) napięcia płynie prąd większy.
Przy obniżaniu napięcia za pomocą transformatora powiększa się prąd, przy podwyższaniu
napięcia zmniejsza się prąd. Tak, więc transformator spełnia zadanie zmiany wartości
napięcia i prądu (zmiennego) przy zachowaniu tej samej częstotliwości.
Moc pozorna
Wielkościami najbardziej charakteryzującymi niektóre typy odbiorników i urządzenia
elektroenergetyczne, przetwarzające energię elektryczną i niektóre typy odbiorników są
napięcie i prąd.
Wartość skuteczna napięcia w transformatorze ograniczona jest wielkością amplitudy
indukcji magnetycznej, a wartość skuteczna prądu dopuszczalną temperaturą nagrzewania się
uzwojeń. O rozmiarach transformatora decyduje iloczyn wartości skutecznych napięcia
i prądu zwany mocą pozorną. Wielkość ta oznaczana jest literą S i podawana jest na
tabliczkach znamionowych transformatorów.
Moc pozorna jest to iloczyn wartości skutecznych napięcia i prądu:
I
U
S
⋅
=
.
Jednostką mocy pozornej jest woltamper:
[ ]
A
V
S
⋅
=
1
1
.
Sprawność transformatora
Miarą jakości transformatora jest jego sprawność określana jako stosunek mocy
oddawanej
2
P do mocy pobieranej
1
P i oznaczaną literą grecką eta η .
Jeżeli uwzględnimy fakt, że w transformatorze zachodzą straty mocy w rdzeniu
oznaczane
r
P
∆
a straty w uzwojeniu
u
P
∆
wówczas możemy napisać:
u
r
P
P
P
P
∆
+
∆
+
=
2
1
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
stąd sprawność :
1
2
1
2
P
P
P
P
P
P
u
r
∆
+
∆
+
=
=
η
.
Przy obciążeniu znamionowym sprawność jest bliska jedności, np. dla mocy znamionowej:
A
kV
100
⋅
=
n
S
,
sprawność
97
,
0
≈
η
,
A
kV
1000
⋅
=
n
S
,
sprawność
98
,
0
≈
η
,
A
kV
100000
⋅
=
n
S
,
sprawność
995
,
0
≈
η
.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest transformator?
2. Jakie zadanie spełnia transformator?
3. Jakie są podstawowe elementy transformatora?
4. Przy jakim zasilaniu ze źródła napięcia transformator może pracować?
5. Co nazywamy przekładnią?
6. Co to jest moc pozorna?
7. Jaka jest jednostka mocy pozornej?
8. Co jest miarą jakości transformator?
9. Jak określamy sprawność transformatora?
4.1.3. Ćwiczenia
Ćwiczenie 1
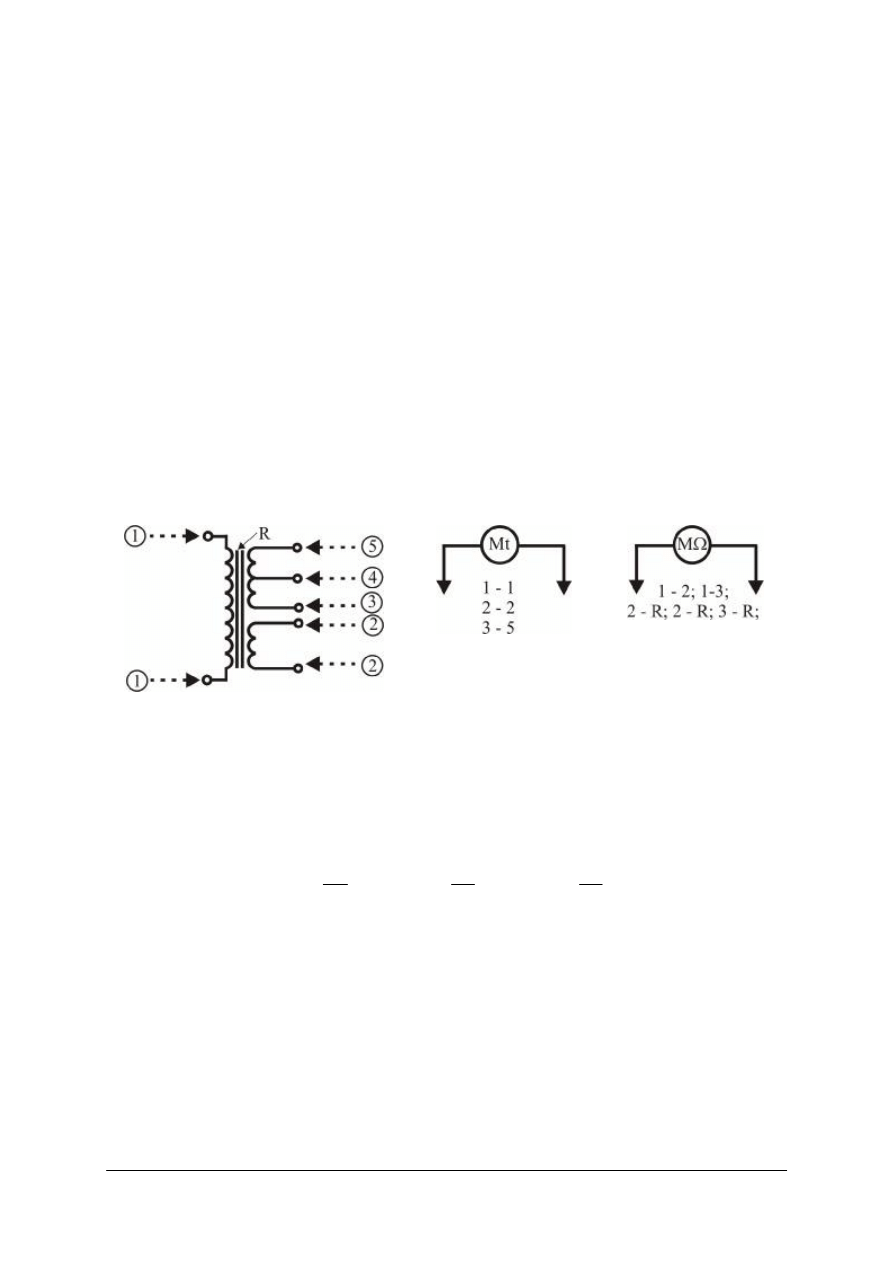
Zmierz opór uzwojeń pierwotnego i wtórnego przy użyciu mostka. Zmierz megomierzem
opór izolacji między uzwojeniami. W tym celu należy połączyć zacisk omomierza
induktorowego z dowolnym zaciskiem (rys. 2) uzwojenia pierwotnego, a drugi zacisk
z dowolnym zaciskiem uzwojenia wtórnego (r). Kręcąc równomiernie korbką omomierza
induktorowego odczytuj na skali wartość oporu w MΩ.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zgromadzić następujące przyrządy pomiarowe i materiały: mostek Thomsona, przewody,
megaomomierz indukcyjny ,
2) połączyć wyżej wymienione elementy zgodnie ze schematem pokazanym na rys. 2.,
3) ustawić odpowiednie zakresy pomiarowe na miernikach,
4) po podłączeniu układ pokazać nauczycielowi w celu sprawdzenia,
5) zmierzyć opór uzwojeń pierwotnego i wtórnego przy użyciu mostka,
6) zapisać wyniki pomiaru:
R
1-1
= ..............
R
2-2
.................
R
3-5
................
7) obliczyć przekładnię transformatora,
2
1
z
z
=
ϑ
8) wykonać pomiar oporu izolacji między uzwojeniami pierwotnym i wtórnym,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
9) zapisać wyniki pomiaru:
R
1-2
= ....................,
R
1-3
= ....................,
10) wykonać pomiar oporu izolacji między uzwojeniem pierwotnym a rdzeniem,
11) zapisać wyniki pomiaru:
R
1-R
= ....................,
R
2-R
= ....................,
12) wykonać pomiar oporu izolacji między uzwojeniem wtórnym a rdzeniem,
13) zapisać wyniki pomiaru:
R
3-R
= ....................,
14) po sprawdzeniu rozłączyć układ,
15) porównać otrzymane wyniki i zapisać wnioski.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania, kalkulator,
−
mostek Thomsona Mt,
−
megaomomierz indukcyjny MΩ,
−
transformator.
a)Błąd!
b)
Rys. 2. Schemat transformatora a) pomiar oporów uzwojeń, b) pomiar oporów izolacji.
Ćwiczenie 2
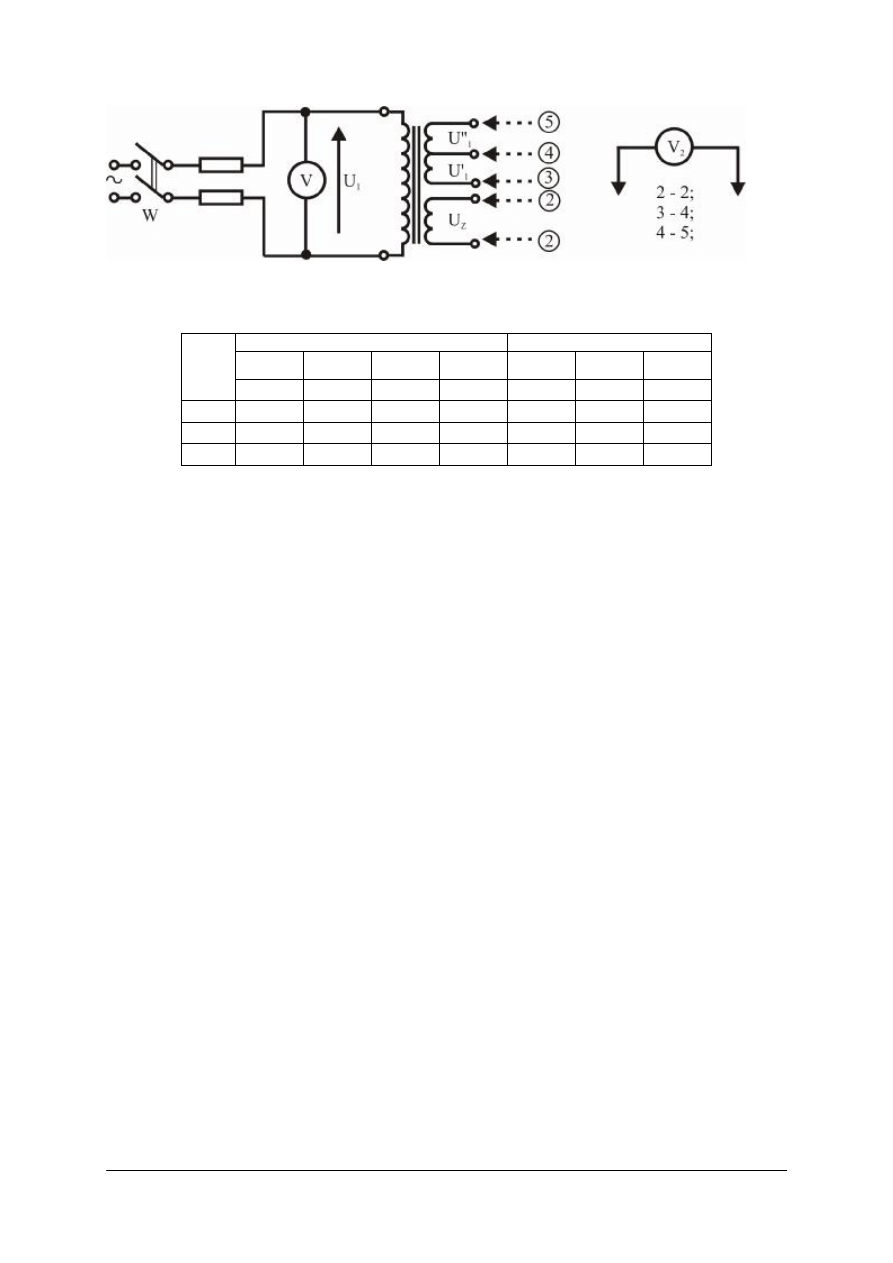
Włącz transformator bezpośrednio do sieci (rys. 3), zmierz napięcie na uzwojeniach nie
obciążonego transformatora.
Przekładnię napięciową transformatora oblicz ze wzoru:
Z
U
U
1
1
=
ϑ
a
U
U
′
=
1
2
ϑ
a
U
U
′′
=
1
3
ϑ
w którym:
Z
U – napięcie na uzwojeniu wtórnym (zaciski 2-2),
a
U
′
– napięcie na jednej połowie uzwojenia wtórnego (zaciski 3-4),
a
U
′′
– napięcie na drugiej połowie uzwojenia wtórnego (zaciski 4-5),
1
U – napięcie doprowadzone do uzwojenia pierwotnego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Rys. 3. Pomiar przekładni napięciowej transformatora.
Tabela 1. Tabela wyników pomiarów i obliczeń – ćwiczenie 1.
Pomiary
Obliczenia
1
U
Z
U
a
U
′
a
U
′′
1
ϑ
2
ϑ
3
ϑ
Lp
[V]
[V]
[V]
[V]
1.
2.
3.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zgromadzić następujące przyrządy pomiarowe i materiały: woltomierze, wyłącznik,
przewody,
2) połączyć wyżej wymienione elementy zgodnie ze schematem pokazanym na rys. 3,
3) ustawić odpowiednie zakresy pomiarowe na miernikach,
4) zmierzyć napięcia uzwojeń pierwotnego i wtórnego przy użyciu woltomierza,
5) zapisać wyniki pomiaru:
1
U ,
Z
U ,
a
U
′
,
a
U
′′
w tabeli 1,
6) obliczyć przekładnię transformatora,
7) zapisać wyniki pomiaru:
1
ϑ ,
2
ϑ ,
3
ϑ
w tabeli 1,
8) po sprawdzeniu rozłączyć układ,
9) porównać otrzymane wyniki i zapisać wnioski.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania, kalkulator,
−
woltomierz – 2 szt.,
−
przewody laboratoryjne,
−
wyłącznik,
−
transformator.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zdefiniować pojęcie transformatora?
2) zdefiniować przekładnię transformatora?
3) określić jaką funkcję pełnią, uzwojenia w transformatorze?
4) rozróżnić uzwojenia pierwotne i wtórne?
5) zmierzyć rezystancję uzwojeń transformatora?
6) zmierzyć rezystancję izolacji uzwojeń transformatora?
7) ustawić odpowiednie zakresy pomiarowe na miernikach?
8) określić na podstawie pomiaru rezystancji sprawność uzwojenia?
9) określić na podstawie pomiaru rezystancji sprawność izolacji uzwojenia?
10) zdefiniować pojęcie stanu jałowego?
11) zdefiniować pojęcie stanu obciążenia znamionowego?
12) zmierzyć moc dostarczaną do transformatora?
13) obliczyć moc dostarczaną do transformatora?
14) obliczyć sprawność transformatora?
15) określić parametry transformatora na podstawie tabliczki?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
4.2. Maszyny prądu stałego
4.2.1. Materiał nauczania
W poprzedniej części zajmowaliśmy się maszyną statyczną, która nazwaliśmy
transformatorem. Maszyna elektryczna wirująca jest to maszyna elektryczna, której część
ruchoma wykonuje ruch obrotowy.
Klasyfikując elektryczne maszyny wirujące w zależności od postaci energii wydawanej
i pobieranej wyróżniamy:
1. prądnicę (generator), tj. elektryczną maszynę wirującą, przetwarzającą energię
mechaniczną na elektryczną;
2. silnik (motor), tj. elektryczną maszynę wirującą, przetwarzającą energię elektryczną na
mechaniczną;
3. przetwornicę, tj. elektryczną maszynę wirującą, przetwarzającą energię elektryczną na
energię elektryczną o innych parametrach.
Wyróżniamy następujące podstawowe części elektrycznych maszyn wirujących:
−
stator (stojan), tj. nieruchomą część maszyny,
−
rotor (wirnik), tj. ruchomą część maszyny,
−
twornik, tj. część maszyny (stator albo rotor), do której doprowadza się energię
elektryczną do przetworzenia w maszynie, albo od której odprowadza się energię
elektryczną przetworzoną w maszynie,
−
magneśnicę, tj. część maszyny służącą do wytworzenia strumienia magnetycznego, ale
w której nie następuje przetwarzanie energii.
W maszynie elektrycznej można wyróżnić dwa obwody:
−
obwód strumienia magnetycznego,
−
obwód prądu.
Obwodem dla strumienia magnetycznego jest rdzeń wykonany z materiału
ferromagnetycznego. Elementy rdzenia, wykonuje się najczęściej z litej stali lub z blach
elektrotechnicznych. Ma to na celu zmniejszenie strat w rdzeniu. Dla zmniejszenia strat
z prądów wirowych blachy są odpowiednio cienkie (np. 0,5 mm lub 0,35 mm), izolowane od
siebie i mają dużą rezystywność, uzyskaną np. przez odpowiednią zawartość krzemu. Dla
zmniejszania strat z histerezy, blachy elektrotechniczne przechodzą odpowiedni proces
obróbki (np. proces zimnego walcowania), w celu uzyskania odpowiedniej struktury
krystalicznej.
Obwodem dla prądu są w maszynie elektrycznej uzwojenia wykonane z miedzi
(najczęściej) lub z aluminium.
Uzwojenia oddzielone są od siebie i od rdzenia izolacją. Izolacja w maszynie elektrycznej
musi mieć dużą wytrzymałość elektryczną i mechaniczną, dużą termo-stabilność (odporność
na odkształcenia pod wpływem cykli termicznych), wolno przebiegający proces starzenia się
oraz, co jest bardzo często trudne do zrealizowania, mały opór termiczny.
Rotor jest oddzielony od statora szczeliną przywirnikową, która w maszynach
chłodzonych powietrzem nazywa się także szczeliną powietrzną. Szczelina przywirnikowa
jest
odcinkiem
drogi
strumienia
magnetycznego,
przebiegającym
w
ośrodku
niemagnetycznym, a więc jest odcinkiem drogi strumienia, na którym występuje największa
część napięcia magnetycznego. Szczelina przywirnikową ma, więc duży wpływ na
właściwości maszyny elektrycznej.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Silniki prądu stałego
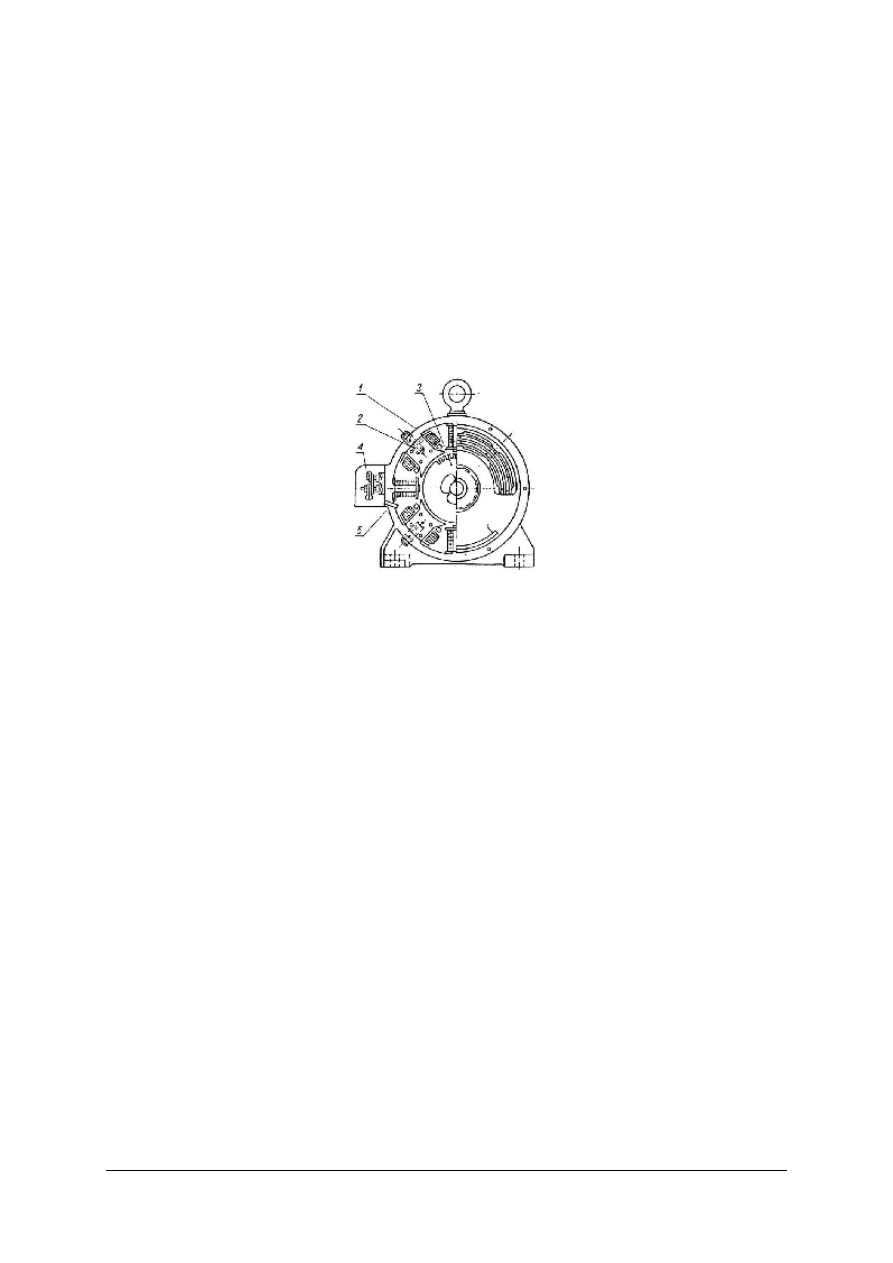
Podstawowe elementy silnika prądu stałego w sposób uproszczony przedstawia rys. 4.
W części nieruchomej – zwanej stojanem – można wyróżnić jarzmo, bieguny główne wraz
z nabiegunnikami oraz bieguny komutacyjne. Jarzmo jest najczęściej odlewem żeliwnym.
Stanowi ono część obwodu magnetycznego oraz jest jednocześnie obudową maszyny. Do
jarzma przytwierdzone są bieguny.
Wirnik to element obracający się, zwany również twornikiem, wykonany jest z blach
stalowych z dodatkiem krzemu. Na obwodzie wirnika, w żłobkach, ułożone jest uzwojenie.
Pręty
uzwojenia
zabezpieczone
są
przed
wypadnięciem
klinami
z
materiału
niemagnetycznego. Końce elementów uzwojenia przyłączone są do wycinków komutatora,
umocowanego obok żelaza wirnika na wspólnym wale. Wycinki komutatora są izolowane od
siebie i od wału .
Rys. 4. Podstawowe elementy silnika prądu stałego: 1 - jarzmo, 2 - bieguny główne, 3 - wirnik, 4 –
tabliczka zaciskowa, 5 - bieguny komutacyjne [4, s. 368].
Podział silników
Ze względu na sposób połączenia uzwojenia elektromagnesów (biegunów głównych)
z uzwojeniem wirnika silniki prądu stałego dzieli się na:
−
silniki bocznikowe (równoległe połączenie uzwojeń),
−
silniki szeregowe (szeregowe połączenie uzwojeń),
−
silniki bocznikowo-szeregowe (w tym przypadku bieguny mają dwa uzwojenia – jedno
połączone równolegle i drugie szeregowo).
Oznaczenia zacisków uzwojeń maszyn prądu stałego
Maszyna prądu stałego ma zawsze na rotorze uzwojenie twornika, a w statorze jedno
lub kilka uzwojeń:
−
uzwojenie wzbudzenia,
−
uzwojenie komutacyjne,
−
kompensacyjne,
−
dodatkowe.
Uzwojenie wzbudzenia może być:
−
niezależne, czyli obce, tj. zasilane z obcego źródła,
−
szeregowe, tj. połączone szeregowo z uzwojeniem twornika,
−
bocznikowe, tj. dołączone bocznikowo do uzwojenia twornika.
Oznaczenia zacisków i uzwojeń przedstawiono w tabeli 2.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
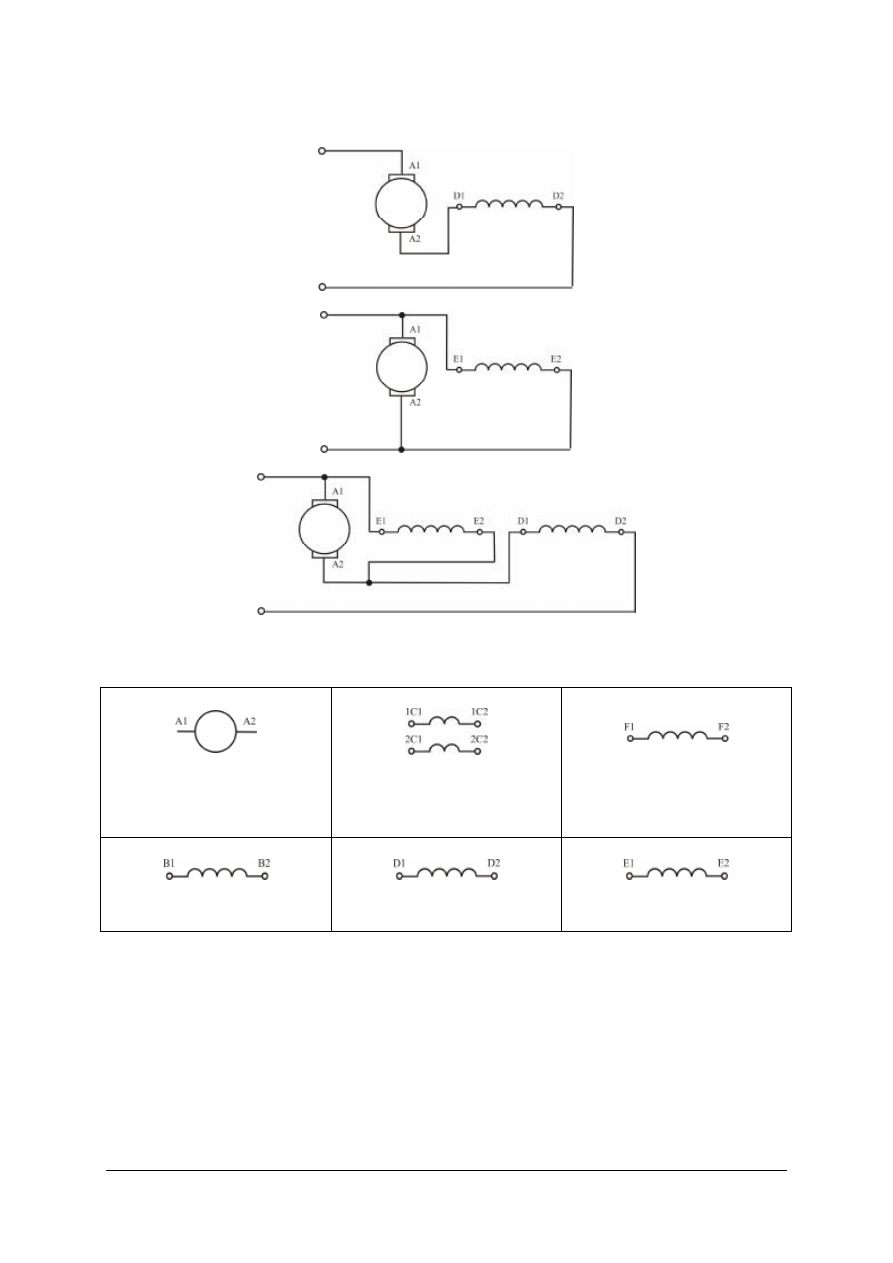
a)
b)
c)
Rys. 5. Schemat połączeń silników prądu stałego a) szeregowy, b)bocznikowy, c)szeregowo-bocznikowy.
Tabela 2. Oznaczenia zacisków i uzwojeń silników prądu stałego (wg obowiązującej normy PN-88/E-06708)
Uzwojenie twornika z 2 zaciekami
Uzwojenie kompensacyjne w dwóch
sekcjach (dla połączenia po obu
stronach uzwojenia twornika) z 4
zaciskami
Uzwojenie
wzbudzenia
niezależne
(uzwojenie
obcego
wzbudzenia)
z 2 zaciskami
Uzwojenie biegunów komutacyjnych z
2 zaciskami
Uzwojenie
szeregowe
wzbudzenia
z 2 zaciskami
Uzwojenie bocznikowe z 2 zaciskami
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to maszyna prądu stałego?
2. Jakie znasz rodzaje maszyn prądu stałego?
3. Jaki znasz podstawowe elementy maszyny prądu stałego?
4. Czy potrafisz wyjaśnić jak działa silnik prądu stałego?
5. Jak dzielimy silniki prądu stałego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2.3. Ćwiczenia
Ćwiczenie 1
Zmierz opór uzwojeń twornika i uzwojenia wzbudzenia przy użyciu mostka. Rezystancja
uzwojenia twornika maszyny o mocy rzędu pojedynczych kW ma wartość rzędu
pojedynczych Ω, natomiast rezystancja wzbudzenia ma wartość setek omów.
Wyniki
pomiarów wpisać w tabeli 3.
Tabela 3. Tabela wyników pomiarów ćwiczenie 1.
R [A1-A2]
R [A-B]
R [B1-B2]
R [G-H]
R [E1-E2]
R[C-D]
Ω
Ω
Ω
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zgromadzić następujące przyrządy pomiarowe i materiały: mostek Thomsona, przewody,
2) połączyć wyżej wymienione elementy zgodnie ze wskazówkami nauczyciela,
3) ustawić odpowiednie zakresy pomiarowe na mierniku,
4) po podłączeniu układ pokazać nauczycielowi w celu sprawdzenia,
5) zmierzyć opór uzwojeń przy użyciu mostka,
6) zapisać wyniki pomiaru.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt przybory do pisania, kalkulator,
−
silnik prądu stałego
−
mostek Thomsona Mt,
−
przewody laboratoryjne,
Ćwiczenie 2
Rozłóż na części wskazany silnik. Sporządź niezbędne szkice. Zapoznaj się z układem
wyjść i połączeń uzwojeń na tabliczce silnika.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zgromadzić następujące przyrządy i materiały: silnik prądu stałego, komplet kluczy
oczkowych i płaskich, ściągacz do łożysk, imadło, czyściwo.
2) zamontować silnik w imadle
3) rozłożyć silnik zgodnie ze wskazówkami nauczyciela,
4) rozpoznać części silnika,
5) złożyć ponownie silnik,
6) zapisać wnioski i uwagi.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt przybory do pisania, kalkulator,
−
silnik prądu stałego,
−
komplet kluczy oczkowyh i płaskich,
−
ściągacz do łożysk,
−
czyściwo,
−
imadło.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zdefiniować pojęcie maszyna prądu stałego?
2) określić jakie funkcje pełnią uzwojenia w silniku prądu stałego?
3) rozróżnić uzwojenia w maszynie prądu stałego?
4) określić na podstawie pomiaru rezystancji sprawność uzwojenia ?
5) ustawić odpowiednie zakresy pomiarowe na miernikach ?
6) określić parametry silnika prądu stałego na podstawie tabliczki?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
4.3. Maszyny prądu zmiennego
4.3.1. Materiał nauczania
Silniki jednofazowe są budowane na stosunkowo niewielkie moce. Uzwojeniem
głównym silnika indukcyjnego jednofazowego jest znajdujące się w stojanie uzwojenie
jednofazowe. Wirnik silnika jest klatkowy, w wyjątkowych wypadkach pierścieniowy.
Mając do dyspozycji silnik asynchroniczny 3-fazowy możemy zastosować go jako
jednofazowy, zasilając w odpowiedni sposób z sieci. Należy zauważyć, że przy jednofazowej
pracy dopuszczalne jest znacznie mniejsze (~ 60%) obciążenie niż obciążenia znamionowe
przy pracy trójfazowej.
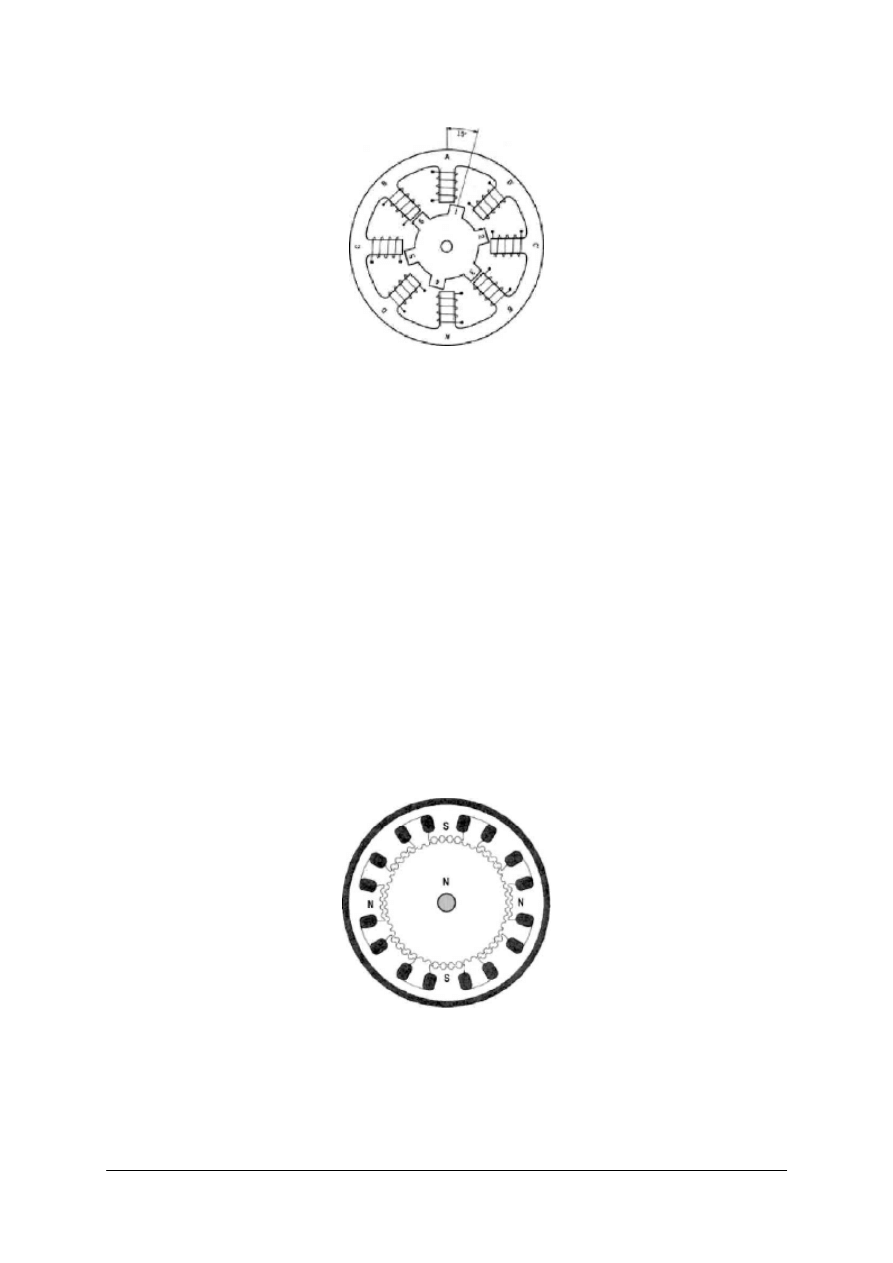
Opis pracy silnika jednofazowego
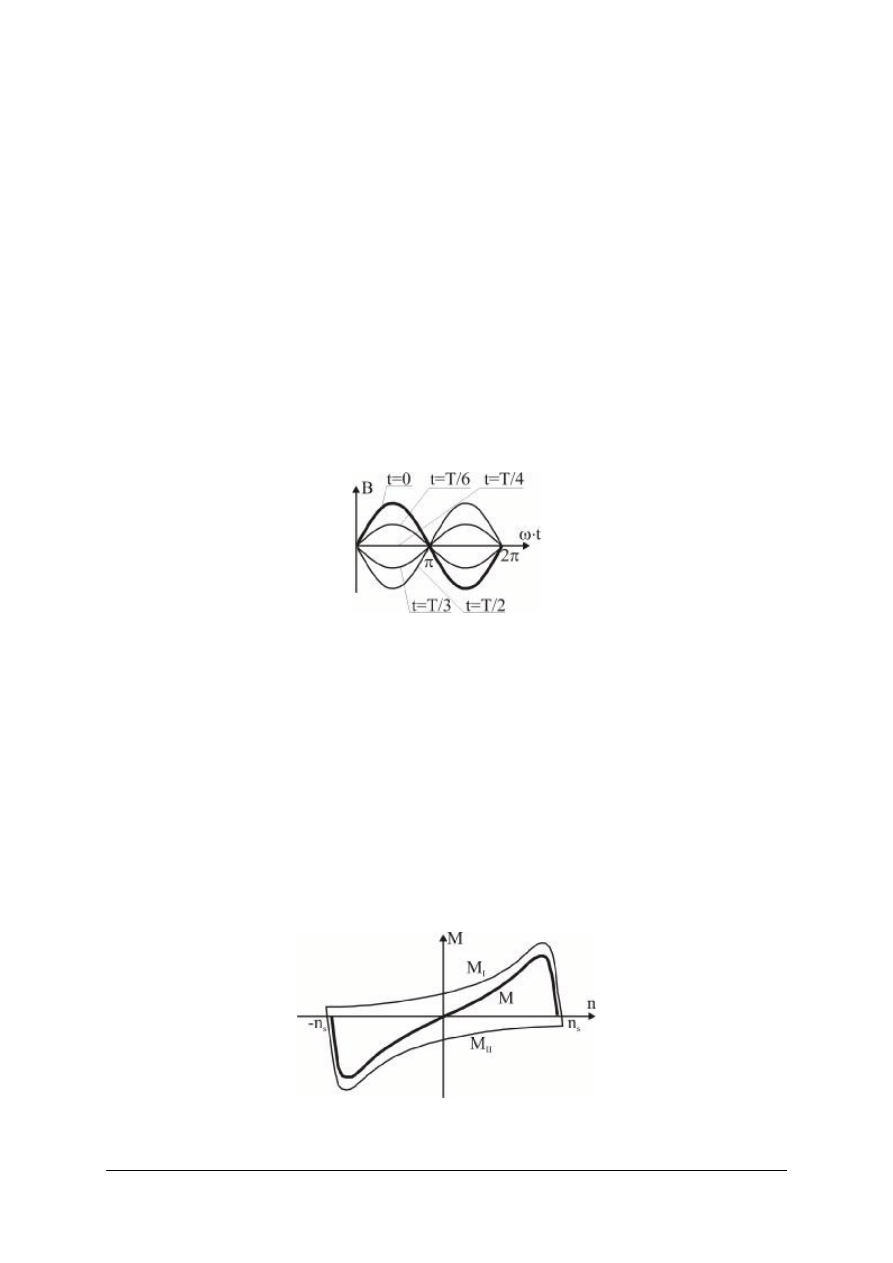
Zasilane prądem przemiennym uzwojenie stojana indukuje w szczelinie maszyny pole
zmienne (rys. 6).
Rys. 6. Przebieg podstawowej harmonicznej przestrzennej pola wytworzonego przez uzwojenie
jednofazowe dla różnych chwil czasowych.
Pole to można rozłożyć na dwa pola wirujące w przeciwnych kierunkach. Na rys. 7
przedstawiono przebiegi momentów od obu pól wirujących (MI, MII) oraz moment
wypadkowy (M) w zależności od prędkości obrotowej (n).
Przy n=0 silnik indukcyjny jednofazowy nie wytwarza momentu rozruchowego. Jeżeli
jednak wirnikowi nada się pewną prędkość obrotową w dowolnym kierunku, to pojawia się
różny od zera moment powodujący dalszy rozruch silnika.
Silnik jednofazowy może wytwarzać moment rozruchowy, jeżeli zmieni się rozkład indukcji
w szczelinie. W tym celu w stojanie umieszcza się uzwojenie dodatkowe pracujące bądź tylko
w chwili rozruchu (uzwojenie rozruchowe), bądź też w sposób ciągły (uzwojenie
pomocnicze).
Rys. 7. Charakterystyka mechaniczna silnika indukcyjnego jednofazowego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
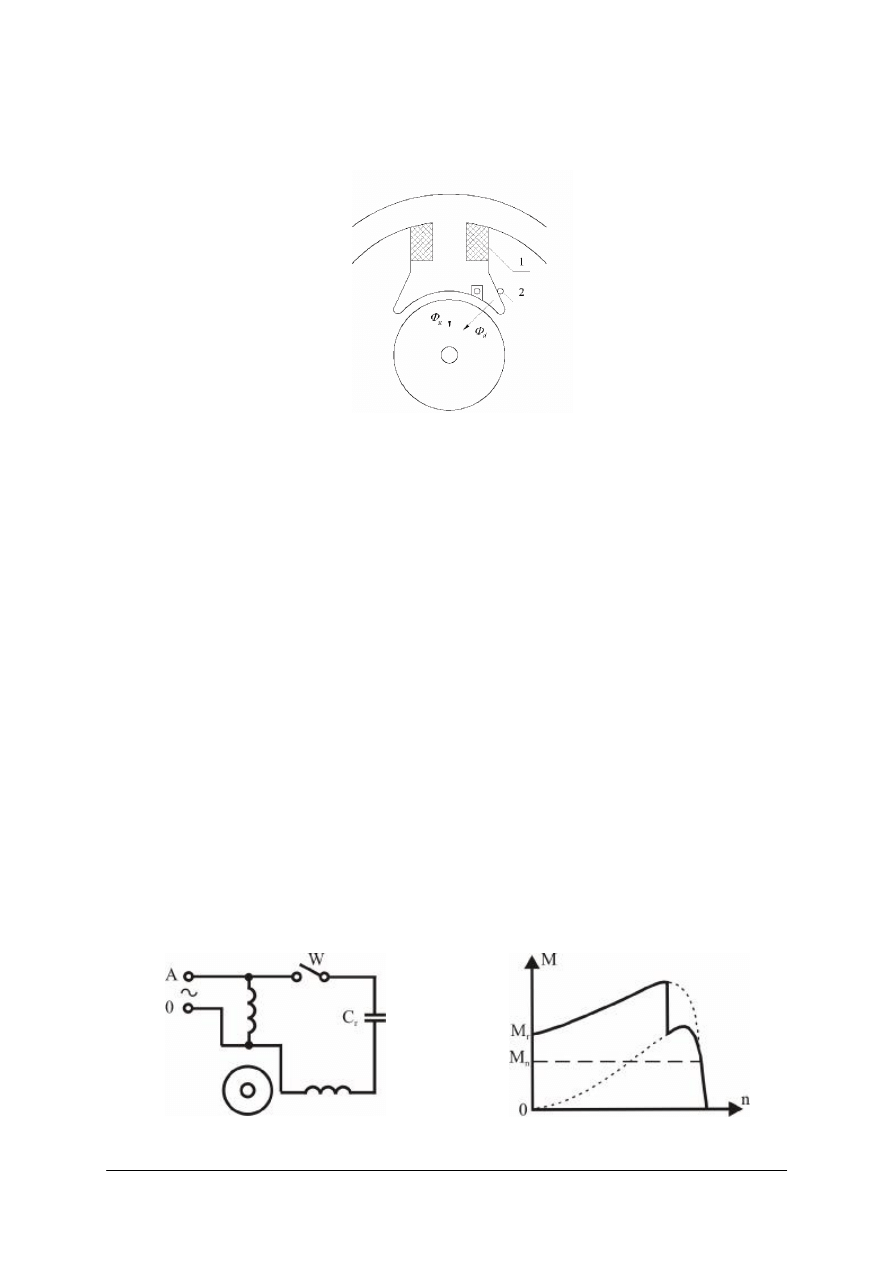
Budowa silnika
Małe silniki jednofazowe są często budowane z uzwojeniem pomocniczym zwartym rys. 8.
Rys. 8. Silnik z uzwojeniem pomocniczym zwartym, 1 – uzwojenie główne, 2 – uzwojenie pomocnicze [6].
Mają one wirnik klatkowy i uzwojenie stojana skupione w postaci cewek (1) nałożonych
na bieguny stojana. Na każdym biegunie znajduje się żłobek, który dzieli nabiegunnik na
dwie nierówne części. Uzwojenie pomocnicze (2) stanowi zwój zwarty obejmujący mniejszą
część nabiegunnika. Powstaje w ten sposób dodatkowy strumień
d
Φ
wywołany sumą
przepływów
p
g
Θ
+
Θ
(
g
Θ
– przepływ uzwojenia głównego,
p
Θ
– przepływ uzwojenia
pomocniczego). Przesunięte względem siebie w czasie i przestrzeni strumienie
g
Φ
i
d
Φ
tworzą wirujące pole eliptyczne powodujące powstanie
niewielkiego
momentu
rozruchowego, wystarczającego do uruchomienia silnika. Wadą tego rozwiązania jest mała
sprawność silników, duże straty stałe w zwoju zwartym i mały moment rozruchowy - około
0,25·Mn (Mn – moment rozruchowy znamionowy).
Schemat połączeń
Lepszym rozwiązaniem jest nawinięcie dodatkowego uzwojenia (umieszczonego
w stojanie w żłobkach nie wykorzystanych przez uzwojenie główne) tak, aby osie obu
uzwojeń były przesunięte względem siebie o kąt
π
/2. Jeżeli prądy płynące w uzwojeniu
głównym i pomocniczym są przesunięte o kąt
β
=
π
/2, to przy jednakowych przepływach obu
uzwojeń wytworzone pole wirujące jest kołowe, a więc moment rozruchowy jest największy.
Przesunięcie fazowe prądów uzyskuje się przez włączenie w szereg z uzwojeniem
pomocniczym kondensatorów (rys. 9a, b) lub powiększenie rezystancji tego uzwojenia rys. 9c.
a)
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
b)
c)
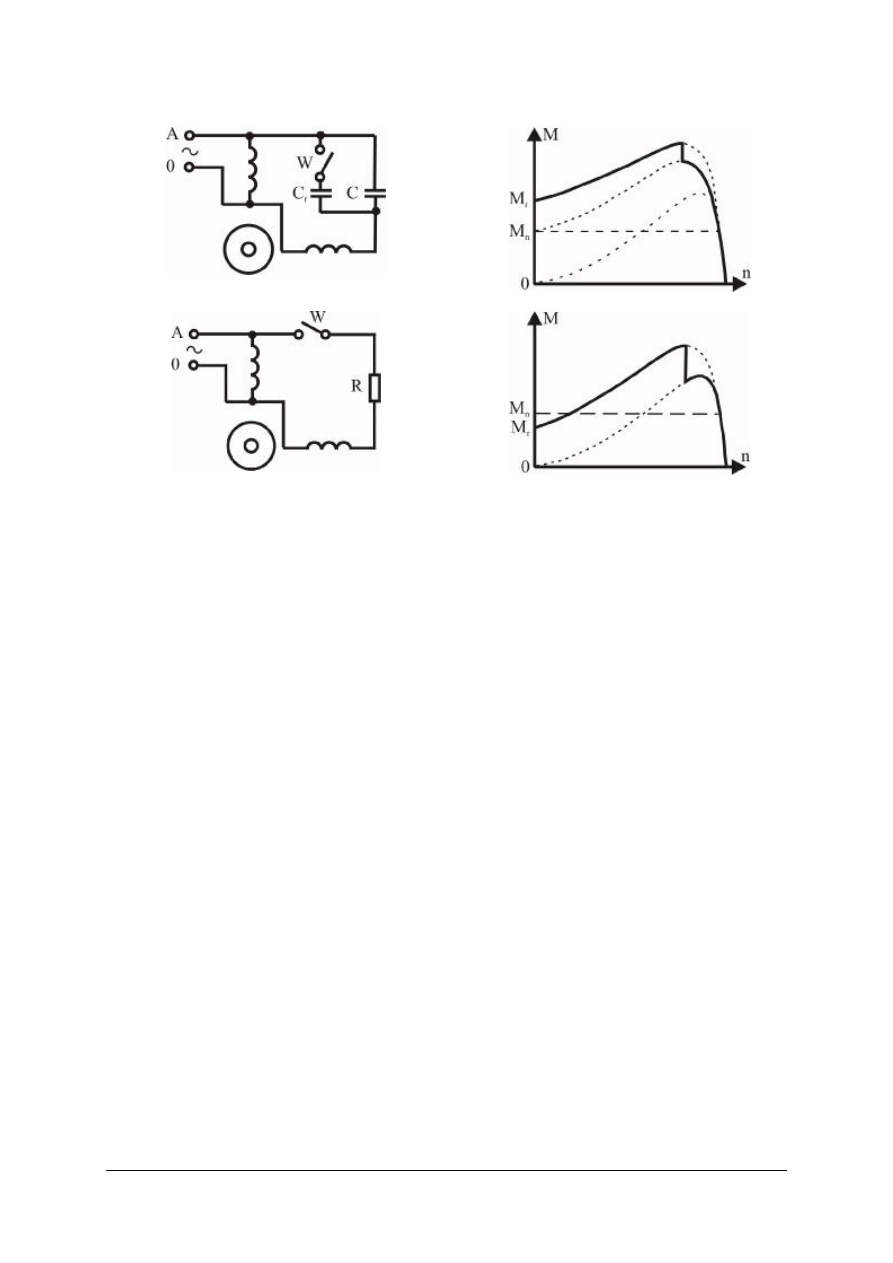
Rys. 9. Schemat połączeń i wykres momentów silnika jednofazowego, a) z uzwojeniem rozruchowym
kondensatorowym, b) z uzwojeniem pomocniczym kondensatorowym, c) z uzwojeniem rozruchowym
rezystancyjnym.
Uzwojenie wykorzystywane tylko podczas rozruchu wyłączane jest za pomocą
wyłącznika odśrodkowego W, umieszczonego na wale silnika. Czasem stosuje się silniki
z dwoma kondensatorami (rys. 9b), z których jeden jest załączony tylko na czas rozruchu,
natomiast drugi pracuje ciągle. Rozwiązanie takie stosuje się po to, aby uzyskać pole jak
najbardziej zbliżone do kołowego zarówno podczas rozruchu (większy moment rozruchowy),
jak i podczas obciążenia (większy współczynnik mocy), kiedy to potrzebna pojemność
kondensatora maleje kilkakrotnie. W celu uproszczenia konstrukcji często rezygnuje się ze
zmiany pojemności i wówczas uzwojenie pomocnicze współpracuje z jednym, stale
załączonym, kondensatorem.
Zwiększenie momentu rozruchowego przez zwiększenie rezystancji uzwojenia
dodatkowego (rys. 9c) uzyskuje się najczęściej po nawinięciu tego uzwojenia przewodem
o odpowiednio zmniejszonym przekroju.
Jeżeli w sieci zasilającej silnik trójfazowy powstanie przerwa w jednej z faz, to silnik taki
nie zatrzymuje się, lecz pracuje nadal jako silnik jednofazowy. Jego moc w takim przypadku
maleje około dwukrotnie. Stosując odpowiedni układ połączeń faz silnika trójfazowego
i odpowiednio dobranych elementów RLC można, przy zasilaniu go napięciem
jednofazowym, uzyskać moc zbliżoną do jego mocy znamionowej.
Istotną wadą silnika jednofazowego jest brak momentu rozruchowego. W celu
wytworzenia momentu rozruchowego stosujemy różne metody, co obrazuje rys. 11.
W stojanie maszyny umieszczamy oprócz uzwojenia fazy roboczej uzwojenie dodatkowe,
tzw. fazę rozruchową, której oś tworzy w przestrzeni z osią fazy roboczej kąt elektryczny, np.
równy ~ 90°. Jeżeli prądy płynące w tych dwu uzwojeniach będą przesunięte względem siebie
w fazie o kąt bliski 80°, to powstanie pole wirujące niemal o stałej wartości (ściśle pole
eliptyczne). W chwili zasilenia nieruchomego silnika napięciem pojawi się, więc moment
rozruchowy. Aby uzyskać przesunięcie fazowe pomiędzy prądami w fazie roboczej
i rozruchowej, włączamy w szereg z fazą rozruchową kondensator (rys. 9) lub oporność
czynną.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Porównując silniki trójfazowe i jednofazowe o tych samych wymiarach należy
stwierdzić, że zarówno moc znamionowa silnika jednofazowego jak i współczynnik mocy
oraz sprawność wykazują mniejsze wartości.
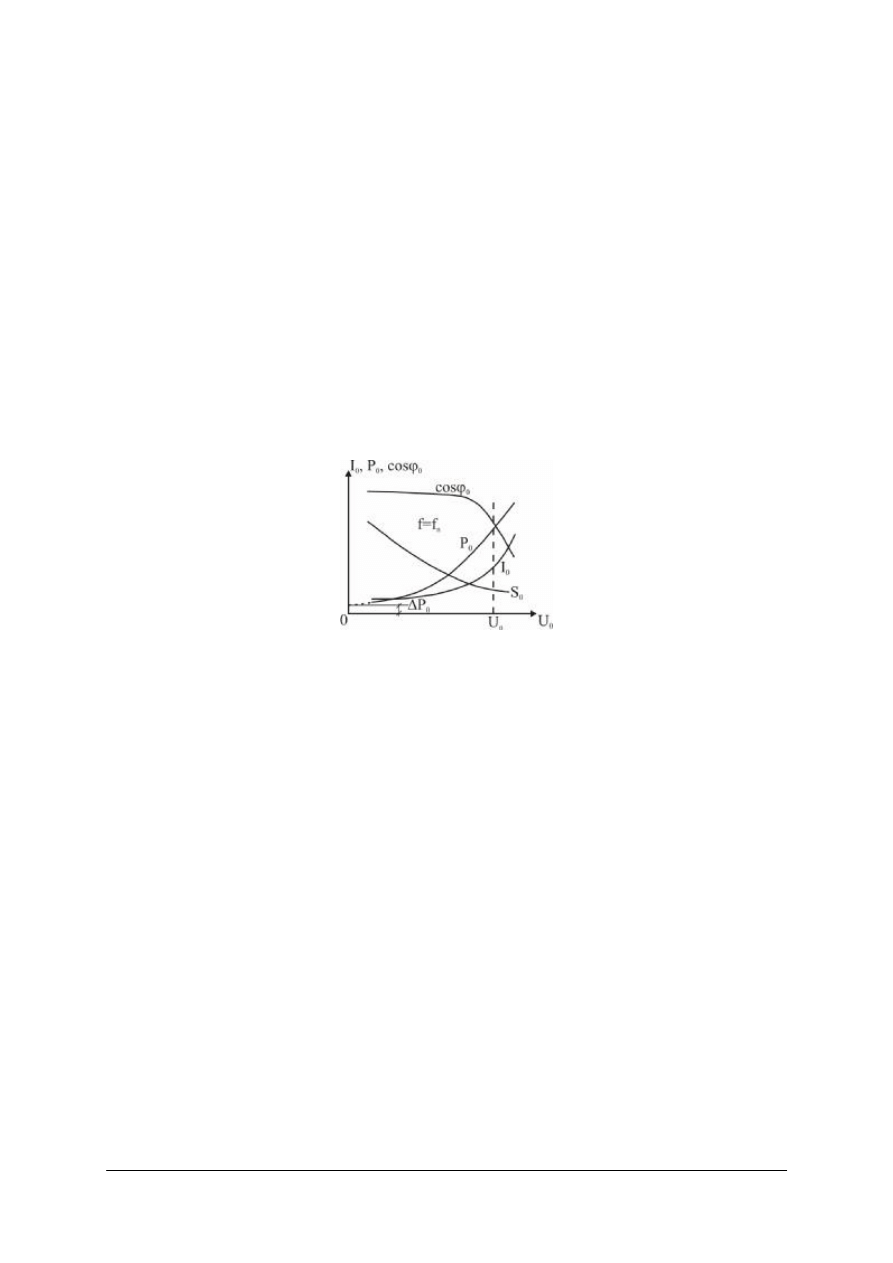
Charakterystyki biegu jałowego
Charakterystyki biegu jałowego umożliwiają, podobnie jak przy badaniu silnika
trójfazowego, określenie strat jałowych i wyznaczenie przybliżonej wartości strat
mechanicznych oraz pozwalają ocenić poprawność konstrukcji silnika, szczelinę maszyny itp.
Prąd biegu jałowego ma dwie składowe. Pierwsza odpowiadająca prądowi wirnika jest,
podobnie jak w silniku trójfazowym, bardzo mała. Druga natomiast odpowiadająca prądowi
wirnika ma znaczną wartość. Dlatego wypadkowy prąd biegu jałowego silnika
jednofazowego może być znacznie większy (do 3 razy) niż prąd biegu jałowego
odpowiadającego mu silnika trójfazowego.
Prąd biegu jałowego silników jednofazowych z kondensatorowym uzwojeniem
pomocniczym jest mniejszy, ponieważ wytwarzane w tym silniku pole jest polem wirującym.
Rys. 10. Charakterystyki biegu jałowego.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest maszyna pradu zmiennego?
2. Jakie znasz rodzaje maszyn prądu zmiennego?
3. Jaki znasz podstawowe elementy maszyny prądu szmiennego?
4. Czy potrafisz wyjaśnić jak działa silnik prądu zmiennego?
5. W jakim celu w stojanie umieszcza się uzwojenie dodatkowe?
6. W jakim celu włączamy w szereg z fazą rozruchową kondensator?
7. W jaki sposób uzyskuje się zwiększenie momentu rozruchowego silnika jednofazowego?
8. Jak wyglądają charakterystyki biegu jałowego silnika jednofazowego?
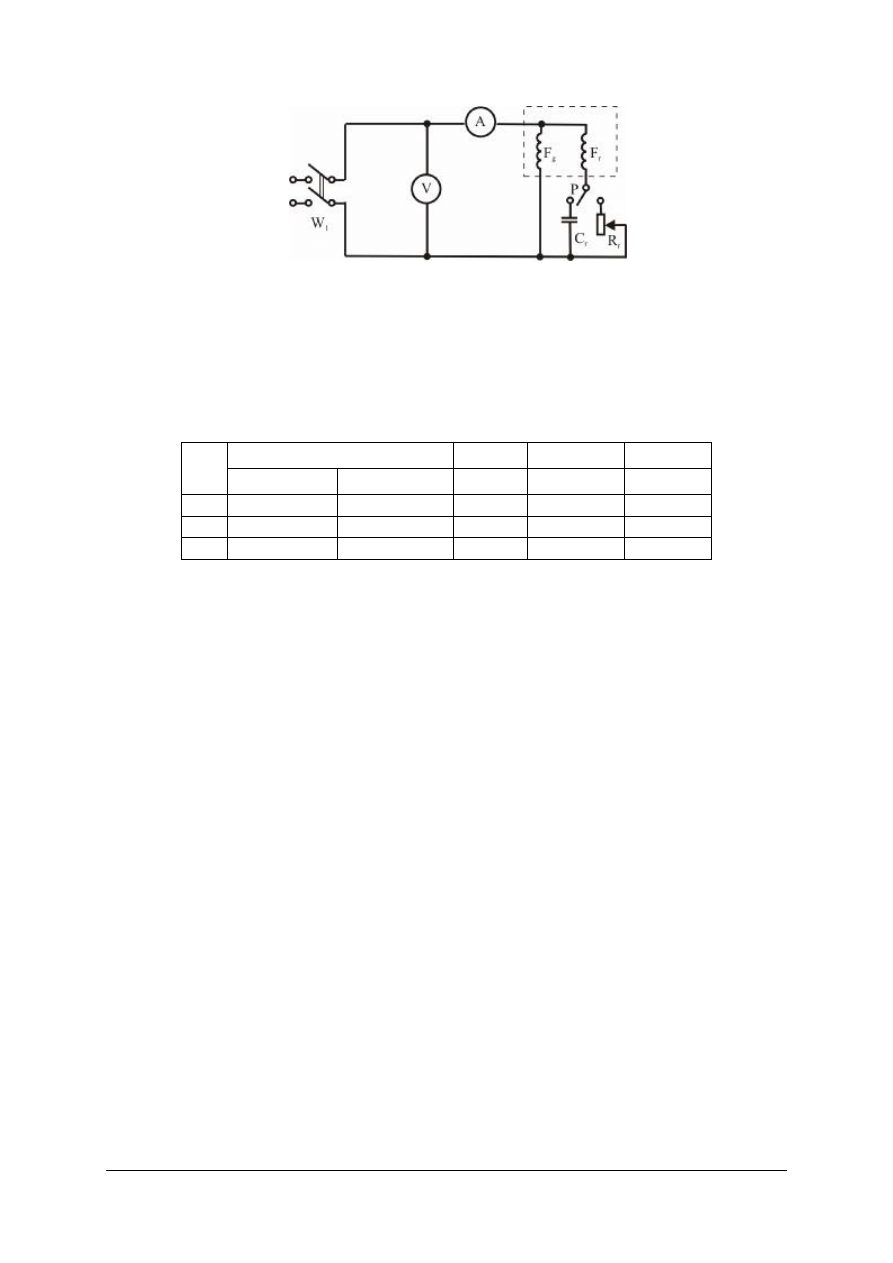
4.3.3. Ćwiczenia
Ćwiczenie 1
W celu zbadania wpływu wartości oporu czynnego oraz pojemności na warunki
rozruchowe włączyć w fazę rozruchową silnika indukcyjnego opornik regulacyjny
r
R oraz
baterie kondensatorów
r
C o zmiennej pojemności (rys. 11).
Zmierzyć dla każdej wartości R
r
i C
r
(przy zahamowanym wirniku) prąd rozruchowy I
r
oraz moment rozruchowy. Moment rozruchowy mierzy się hamulcem Prony'ego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Rys 11. Układ do pomiaru natężenia prądu rozruchowego silnika indukcyjnego jednofazowego.
Zanotować wynik pomiaru w tabeli 4. Wyłączyć silnik, zwolnić hamulec, włączyć silnik
ponownie. Należy przy tym zmierzyć czas rozruchu
r
t , tj. czas, jaki upływa od momentu
włączenia silnika do osiągnięcia prędkości maksymalnej.
Tabela 4. Tabela wyników pomiarów – ćwiczenie 2.
Parametry fazy
r
I
r
M
r
t
Lp
Ω
=
.........
r
R
=
r
C
…….μF
[A]
[kGm]
[s]
1
2
3
Sposób wykonania ćwiczenia:
Aby wykonać ćwiczenie, powinieneś:
1) zgromadzić następujące przyrządy pomiarowe i materiały: silnik indukcyjny
jednofazowy, opornik rozruchowy, baterie kondensatorów o regulowanej pojemności,
przewody laboratoryjne, wyłącznik,
2) połączyć wyżej wymienione elementy zgodnie z schematem rys. 11,
3) ustawić odpowiednie zakresy pomiarowe na miernikach,
4) po podłączeniu układ pokazać nauczycielowi w celu sprawdzenia,
5) zmierzyć prąd rozruchowy, moment rozruchowy oraz czas rozruchu,
6) zapisać wyniki pomiarów w tabeli,
7) po sprawdzeniu przez nauczyciela wyników pomiaru rozłączyć układ,
8) porównać otrzymane wyniki i zapisać wnioski.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt przybory do pisania, kalkulator,
−
silnik indukcyjny jednofazowy,
−
opornik rozruchowy,
−
bateria kondensatorów o regulowanej pojemności,
−
hamulec Prony'ego,
−
amperomierz, woltomierz, sekundomierz,
−
przewody laboratoryjne,
−
wyłącznik.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
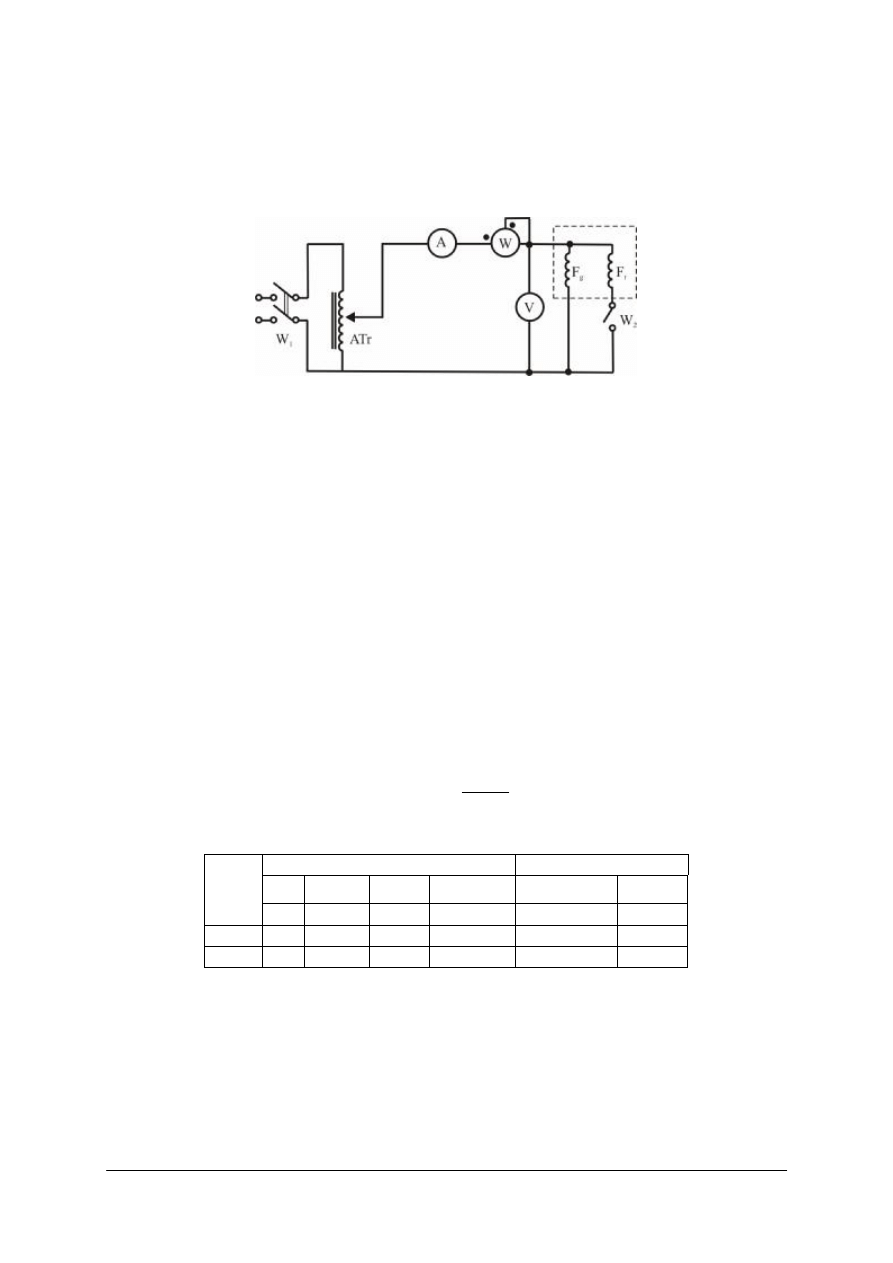
Ćwiczenie 2
Przed właczeniem silnika należy zmierzyć mostkiem Thomsona rezystancję uzwojenia
fazy głównej
g
R . Następnie należy włączyć silnik do sieci poprzez autotransformator
regulacyjny, zgodnie z rys. 12.
Rys. 12. Układ do pomiaru prądu, mocy,
ϕ
cos
, oraz prędkości obrotowej w funkcji obciążenia silnika
indukcyjnego jednofazowego.
W momencie włączenia układu do sieci napięcie doprowadzone do silnika powinno być
równe zeru. Silnik należy uruchomić podnosząc napięcie do wartości znamionowej
zn
o
U
U
=
.
Po uruchomieniu silnika otworzyć wyłącznik
2
W . Zmierzyć prąd jałowy
o
I , moc
o
P pobraną
przez silnik oraz prędkość obrotową n . Wynik pomiarów zanotować w tabeli 5. Na podstawie
danych z tabeli 5 obliczyć:
straty mocy w uzwojeniu stojana P
∆
z wzoru:
2
o
g
I
R
P
⋅
=
∆
,
w którym:
g
R – rezystancja uzwojenia fazy głównej,
o
I – prąd pracy jałowej,
współczynnik mocy
ϕ
cos z wzoru:
o
o
o
I
U
P
⋅
=
ϕ
cos
Tabela 5. Tabela wyników pomiarów i obliczeń ćwiczenie 3.
Pomiary
Obliczenia
o
U
o
I
o
P
o
n
o
P
∆
o
ϕ
cos
Lp
[V]
[A]
[W]
[obr/min]
[W]
1
2
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zgromadzić następujące przyrządy pomiarowe i materiały: silnik indukcyjny
jednofazowy, autortansformator jednofazowy, obrotomierz bezdotykowy, przyrządy
pomiarowe, wyłącznik, przewody laboratoryjne,
2) zmierzyć rezystancję fazy głównej silnika za pomocą mostaka Thomsona – wynik
zanotować,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
3) połączyć wyżej wymienione elementy zgodnie z schematem (rys. 12),
4) ustawić odpowiednie zakresy pomiarowe na miernikach,
5) po podłączeniu układ pokazać nauczycielowi w celu sprawdzenia,
6) zmierzyć prąd jałowy, moc, pobraną przez silnik oraz prędkość obrotową,
7) zapisać wyniki pomiarów w tabeli 5,
8) po sprawdzeniu przez nauczyciela wyników pomiaru rozłączyć układ,
9) porównać otrzymane wyniki i zapisać wnioski.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt przybory do pisania, kalkulator,
−
silnik indukcyjny jednofazowy,
−
autortansformator jednofazowy,
−
obrotomierz bezdotykowy, amperomierz, woltomierz, watomierz, mostek Thomsona,
−
przewody laboratoryjne,
−
wyłączniki.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) określić co to jest uzwojenie główne?
2) zlokalizować gdzie znajduje się uzwojenie główne?
3) przedstawić zasadę pracy silnika jednofazowego?
4) narysować
charakterystykę
mechaniczną
silnika
indukcyjnego
jednofazowego?
5) uzasadnić dlaczego przy prędkości n=0 silnik indukcyjny jednofazowy nie
wytwarza momentu rozruchowego?
6) przedstawić w jakim celu w stojanie umieszcza się uzwojenie dodatkowe?
7) scharakteryzować budowę silniki jednofazowego?
8) wyjaśnić skutek przerwy w sieci zasilającej silnik trójfazowy w jednej z
faz?
9) określić wady silników jednofazowych?
10) przedstawić
schemat
połączeń
i
wykres
momentów
silnika
jednofazowego?
11) opisać jakie korzyści daje nam znajomość charakterystyki biegu jałowego
silnika?
12) obliczyć straty mocy w uzwojeniu stojana?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
4.4. Mikrosilniki
4.4.1. Materiał nauczania
Najprostszym zdefiniowaniem mikrosilnika jest stwierdzenie, że jest to silnik małej
mocy. Jednak jest to niekompletna definicja, ponieważ obecnie jest bardzo ciężko
zdefiniować pojęcie mikrosilnika.
Przyczyną tego stał się szybki postęp technologiczny w zakresie elektroniki i budowy maszyn
elektrycznych, obserwowany od początku lat 70-tych ubiegłego wieku. Po wynalezieniu
i wdrożeniu do masowej produkcji układów scalonych (pierwsze układy scalone wytworzono
w 1958 w USA), a następnie mikroprocesorów (pierwszy w historii mikroprocesor
wyprodukowała firma Intel Corporation w końcu 1970) oraz pamięci półprzewodnikowych
o dużych pojemnościach, wystąpiło na niespotykaną w przeszłości skalę zjawisko
decentralizacji napędów. Stosowany dotychczas w urządzeniu jeden „duży” silnik
i towarzyszące mu mechanizmy przetwarzania ruchu zastępować zaczęto lokalnymi
mikrosilnikami, zasilanymi tylko na czas wykonywania pracy. Decentralizacja napędu była
możliwa, gdy funkcje sterowania działaniem urządzeń można było przekazać tanim
i niezawodnym układom elektronicznym.
Mikrosilniki elektryczne występują w trzech głównych odmianach: jako silniki prądu
stałego lub silniki skokowe oraz jako miniaturowe silniki prądu przemiennego. Silniki prądu
stałego mogą być komutowane mechanicznie (szczotkowo) lub elektronicznie. Silniki prądu
przemiennego mogą być również komutowane szczotkowo. Część z nich nie posiada
komutatora wykorzystując wirujące pole magnetyczne. Silniki skokowe z reguły komutowane
są elektronicznie.
Zastosowania mikrosilników elektrycznych
Mikrosilniki mają zastosowanie w następujących urządzeniach:
−
komputerze, drukarce i skanerze, łącznie około 15,
−
radiomagnetofonie z odtwarzaczem płyt kompaktowych lub wieży Hi-Fi (3 do 10),
−
magnetowidzie,
−
kamerze wideo,
−
aparacie fotograficznym analogowym lub cyfrowym,
−
telefaxie,
−
kwarcowym zegarze wskazówkowym, budziku i zegarku naręcznym, a także wielu
innych.
Po zsumowaniu otrzymuje się 30 do 100 mikrosilników. Oczywiście więcej w domach
nowoczesnych. Do tej liczby dodać należy kilka do kilkunastu mikrosilników w każdym
nowoczesnym samochodzie i około 20 w urządzeniach biurowych, jakimi posługujemy się
w pracy.
Silnik krokowy – wiadomości wstępne
Silnik krokowy jest urządzeniem elektromechanicznym, które przekształca impulsy
elektryczne w dyskretne ruchy mechaniczne. Oś silnika krokowego obraca się o niewielkie
przyrosty kąta pod wpływem impulsów elektrycznych, podawanych w odpowiedniej
kolejności. Obroty silnika są związane bezpośrednio z podawanymi impulsami na kilka
sposobów. Kierunek obrotów osi jest ściśle związany z sekwencją podawanych impulsów,
prędkość obrotów zależy od częstotliwości tych impulsów, a kąt obrotu - od ich ilości.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Zalety i wady silników krokowych.
Zalety:
−
kąt obrotu silnika jest proporcjonalny do ilości impulsów wejściowych,
−
silnik pracuje z pełnym momentem w stanie spoczynku (o ile uzwojenia są zasilane),
−
precyzyjne pozycjonowanie i powtarzalność ruchu – dobre silniki krokowe mają
dokładność ok. 3 – 5% kroku i błąd ten nie kumuluje się z kroku na krok,
−
możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku,
−
niezawodność – ze względu na brak szczotek. Żywotność silnika zależy, zatem tylko od
żywotności łożysk,
−
zależność obrotów silnika od dyskretnych impulsów umożliwia sterowanie w pętli
otwartej, przez co silnik krokowy jest łatwiejszy i tańszy w sterowaniu,
−
możliwość osiągnięcia bardzo niskich prędkości synchronicznych obrotów z obciążeniem
umocowanym bezpośrednio na osi,
−
szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkość jest
proporcjonalna do częstotliwości impulsów wejściowych.
Wady:
−
rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu,
−
trudności przy pracy z bardzo dużymi prędkościami.
Podział silników krokowych
Obecnie istnieje duża liczba różnorodnych typów silników krokowych i jest możliwe
pojawienie się nowych.
Najbardziej ogólny podział silników krokowych dotyczy podziału ze względu na rodzaj
ruchu na silniki wirujące i liniowe. Natomiast podstawowymi rodzajami wirujących silników
krokowych są:
−
silniki z magnesem stałym,
−
silniki o zmiennej reluktancji,
−
silniki hybrydowe.
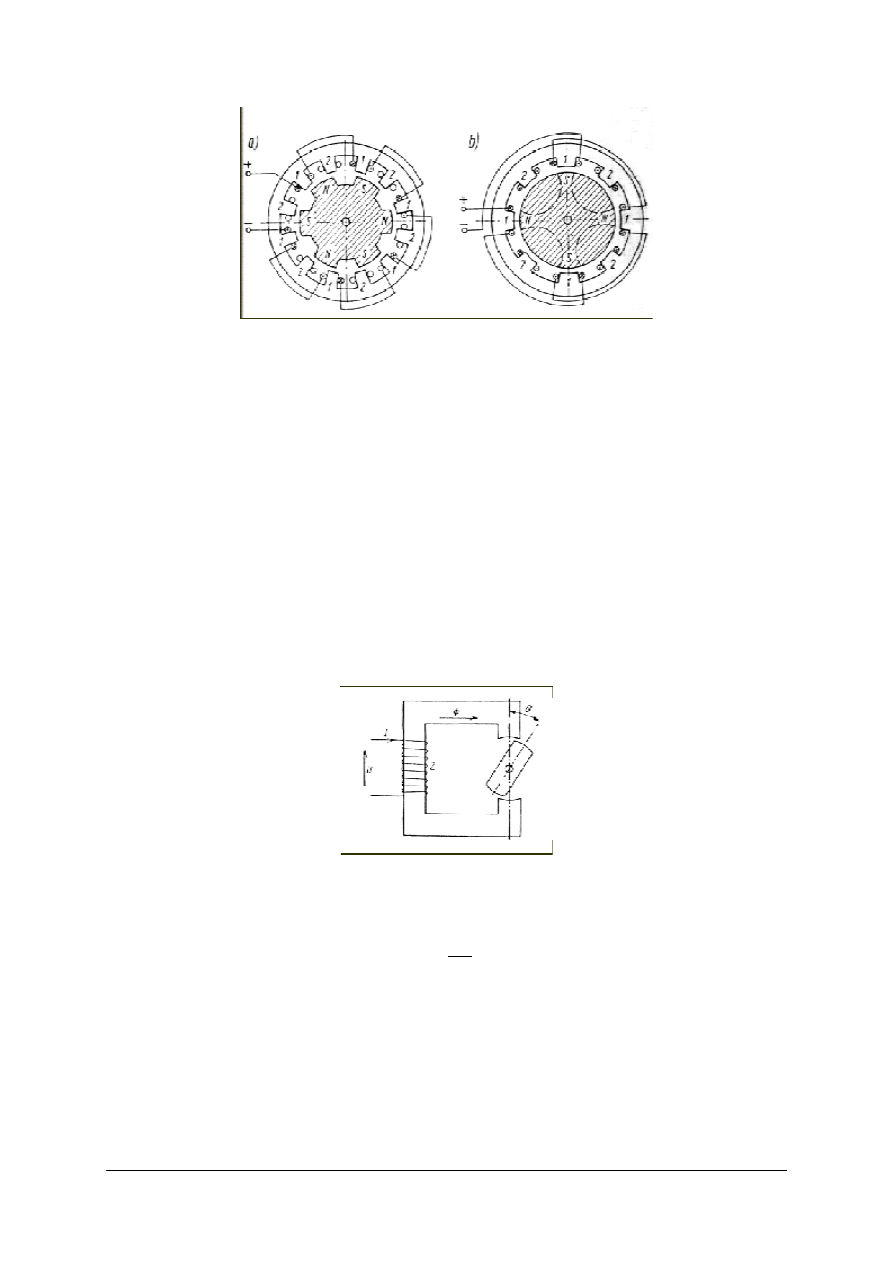
Silniki z magnesem trwałym PM (od ang. Permanent Magnet)
Silniki krokowe o magnesach stałych mogą być wykonane w wersji jednosegmentowej
i wielosegmentowej. Silnik jednosegmentowy może mieć na wirniku podobnie do klasycznej
maszyny synchronicznej bieguny jawne lub utajone.
Silniki krokowe o magnesach trwałych na wirniku można również podzielić na magnesowane
osiowo lub promieniowo. Silnik krokowy o wirniku czynnym często nazywany jest również
silnikiem kubkowymi. Jest to silniki o wirniku wytwarzającym strumień magnetyczny
i o stojanie z uzwojeniem sterującym. Wirnik silnika stanowią magnesy trwałe. Silnik tego
typu jest tani, charakteryzuje się niską rozdzielczością o typowych wartościach kąta 7,5
0
-15
0
tj. 24-48 kroków na obrót. Rotor silnika nie posiada zębów, lecz jest namagnesowany
naprzemiennie biegunami N i S tak, iż bieguny te są usytuowane w linii prostej równoległej
do osi rotora Namagnesowane bieguny rotora wpływają na zwiększenie indukcji
magnetycznej, dlatego silnik z magnesem trwałym w porównaniu z silnikami o zmiennej
reluktancji ma lepszą charakterystykę momentową.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Rys. 13. Silnik krokowy o magnesach trwałych z biegunami a) jawnymi b) utajonymi [7].
Silniki o zmiennej reluktancji VR (od ang. Variable Reluctance)
Oprócz szeroko stosowanych jednosegmentowych silników krokowych często bywają
stosowane silniki wielosegmentowe. Wśród jednosegmentowych silników krokowych
o wirniku reluktancyjnym rozróżnić można takie, w których na jeden biegun stojana przypada
jeden ząb wirnika i takie, w których na jeden biegun stojana przypada kilka zębów wirnika.
Obydwie odmiany mogą być wykonana w wariancie symetrycznym bądź niesymetrycznym.
W budowie symetrycznej uzwojenia dwóch przeciwległych biegunów tworzą pasmo
natomiast budowa niesymetryczna charakteryzuje się tym, że całe uzwojenie jednego pasma
jest umieszczone na jednym biegunie. Działanie silnika skokowego o wirniku reluktancyjnym
opiera się na wykorzystaniu momentu reluktancyjnego. Silnik ten składa się z rotora o wielu
zębach wykonanego z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są
zasilane stałym prądem, bieguny namagnesowują się. Ruch pojawia się na skutek
przyciągania zębów rotora przez zasilane bieguny stojana. Zasadę działania przedstawia rys.
14.
Rys. 14. Powstawanie momentu reluktancyjnego [7].
Strumień w obwodzie magnetycznym opisany jest wzorem
m
z
R
I
f
=
,
w którym:
z
I – prąd zasilania
m
R – reluktancja magnetyczna (opór magnetyczny).
Linie pola magnetycznego wykazują dążenie do zamknięcia w obwodzie o jak najmniejszej
reluktancji. W ten sposób powstaje moment obrotowy, który dąży do ustawienia wirnika
w położeniu
o
0
=
θ
.
Widok silnika reluktancyjnego przedstawia rys. 15.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Rys. 15. Silnik krokowy o wirniku reluktancyjnym - przekrój poprzeczny [8].
Silniki hybrydowe HB (od ang. HyBrid)
Są najnowocześniejszym typem silników krokowych. Silnik hybrydowy jest bardziej
kosztownym niż silnik z magnesem trwałym cechuje się za to lepszymi parametrami, jeśli
chodzi o rozdzielczość i szybkość. Zasada działania silnika opiera się na tym, że magnes
trwały umieszczony na wirniku lub na stojanie wytwarza jednako biegunowy strumień
magnetyczny, który zamyka się w obwodzie magnetycznym: stojan – szczelina powietrzna –
wirnik. Po zasileniu uzwojenia stojana impulsem sterującym, wzbudzony strumień
magnetyczny pod jednym biegunem stojana dodaje się do strumienia magnesów trwałych,
pod drugim zaś odejmuje się. Wirnik zostaje wprowadzony w ruch tak, by osie zębów stojana
i wirnika bieguna o strumieniu wzmacniającym pole magnetyczne pokryły się.
Typowe kąty silnika hybrydowego mieszczą się w zakresie 3,6
o
-0,9
o
tj. 100- 400 kroków
na obrót. Silnik hybrydowy łączy w sobie zalety silnika ze zmienną reluktancją i silnika
z magnesem stałym. Rotor silnika ma wiele zębów i posiada osiowa namagnesowane
magnesy umieszczone koncentrycznie wokół osi (rys. 16).
Zęby rotora zapewniają lepszą drogę przepływowi magnetycznemu, co polepsza
charakterystyki momentu spoczynkowego i dynamicznego w porównaniu z silnikami
z magnesem stałym i reluktancyjnym.
Rys. 16. Silnik hybrydowy – przekrój poprzeczny [8].
Krokowe silniki liniowe
Najczęściej są stosowane liniowe silniki skokowe reluktancyjne i hybrydowe, znaczne
rzadziej elektrodynamiczne. Liniowy reluktancyjny silnik krokowy jest odpowiednikiem

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
wielosegmentowego wirującego reluktancyjnego silnika skokowego. Rdzeń stojana
i nabiegunniki są wykonane z blachy elektrotechnicznej. Hybrydowy, liniowy silnik krokowy
składa się z ruchomego biegunnika i nieruchomego stojana. Stojan stanowi uzębiona płyta
z materiału
ferromagnetycznego.
Część
ruchoma
składa
się
z
dwu
rdzeni
ferromagnetycznych, pomiędzy którymi znajduje się magnes trwały. Na każdym rdzeniu
znajduje się uzwojenie. Rdzenie mają zęby, które znajdują się w takiej odległości od siebie,
by odpowiadały podziałce zębowej stojana. Zaletą liniowego silnika skokowego jest
bezpośrednia zamiana impulsowych sygnałów wejściowych na przemieszczenie liniowe.
Stwierdzono, że liniowe silniki skokowe mają większą dokładność i sprawność oraz lepsze
charakterystyki dynamiczne w porównaniu z wirującymi silnikami krokowymi w połączeniu
z mechanizmami przetwarzania ruchu obrotowego na postępowy.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka jest definicja mikrosilnika?
2. Jakie są rodzaje mikrosilników?
3. Jakie znasz zastosowanie mikrosilników?
4. Co to jest silnik krokowy?
5. Jakie są rodzaje silników krokowych?
6. Jaka jest zasada działania poszczególnych silników krokowych.
4.4.3. Ćwiczenia
Ćwiczenie 1
Mając do dyspozycji 10 mikrosilników wydanych przez nauczyciela, na podstawie
katalogu podaj rodzaj mikrosilnika i jego najważniejsze parametry.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) pobrać od nauczyciela 10 różnych mikrosilników,
2) obejrzeć oznaczenia zawarte przez producenta na obudowie mikrosilników i w katalogu
wyszukać każdy,
3) zapisać w zeszycie jaki jest to rodzaj mikrosilnika wraz z jego najważniejszymi
parametrami.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania,
−
katalog mikrosilników,
−
10 szt. różnego typu mikrosilników.
Ćwiczenie 2
Dla dwóch wybranych przez siebie mikrosilników wykonaj przegląd oraz próbne
uruchomienie zgodnie z instrukcją przygotowaną przez nauczyciela i dołączoną do
stanowiska.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) z pośród mikrosilników otrzymanych w ćwiczeniu 1 wybrać dwa,
2) korzystając z instrukcji stanowiskowej danej przez nauczyciela wykonać przegląd
i próbne uruchomienie,
3) po zakończeniu zaprezentować nauczycielowi czy wybrane mikrosilniki są sprawne
i działają.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania,
−
katalog mikrosilników,
−
instrukcja stanowiskowa,
−
10 szt. różnego typu mikrosilników,
−
zasilacz napięcia stabilizowany regulowany 0-30V,
−
multimetry, przewody laboratoryjne.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zdefiniować pojęcie mikrosilnika?
2) podać rodzaje mikrosilników?
3) podać zastosowania mikrosilników?
4) zdefiniować pojęcie silnika krokowego?
5) wymienić typy silników krokowych?
6) wyjaśnić
zasadę
działania
poszczególnych
typów
silników
krokowych?
7) wyszukać z katalogu parametry wybranego mikrosilnika?
8) wykonać przegląd i próbne uruchomienie wybranego mikrosilnika?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
4.5. Sterowniki
4.5.1. Materiał nauczania
Sterownikiem nazywa się układ, który reguluje pracą innego urządzenia za pomocą
sygnałów wejściowych (sterujących). Wyróżnia się, więc obiekt regulowany (urządzenie)
układ sterujący (sterownik) i układ wejściowy podający sygnały wejściowe.
W zależności od tego, z jakich elementów sterowniki są wykonane oraz od tego, jakiego
rodzaju urządzeniem sterujemy, rozróżniamy wiele typów sterowników, takich jak:
−
sterowniki prądu zmiennego,
−
sterowniki prądu stałego,
−
sterowniki stycznikowo przekaźnikowe,
−
sterowniki programowalne PLC.
Sterowniki prądu zmiennego
Sterowniki prądu zmiennego służą do ciągłej zmiany wartości skutecznej napięcia, prądu lub
mocy czynnej odbiornika. Funkcję tę może spełniać każdy z układów prostowniczych, lecz
w przebiegach wyjściowych występuje wówczas składowa stała. Składowa stała jest
najczęściej niepożądana i dlatego w sterownikach jest ona wyeliminowana. Sterowniki
charakteryzują się symetrycznymi przebiegami napięć zasilania i prądów obciążenia.
W sterownikach załączenie tyrystora odbywa się przez doprowadzenie impulsu do
jego bramki. Wyłączenie w obwodach prądu zmiennego następuje w chwili zmiany
polaryzacji napięcia anoda-katoda.
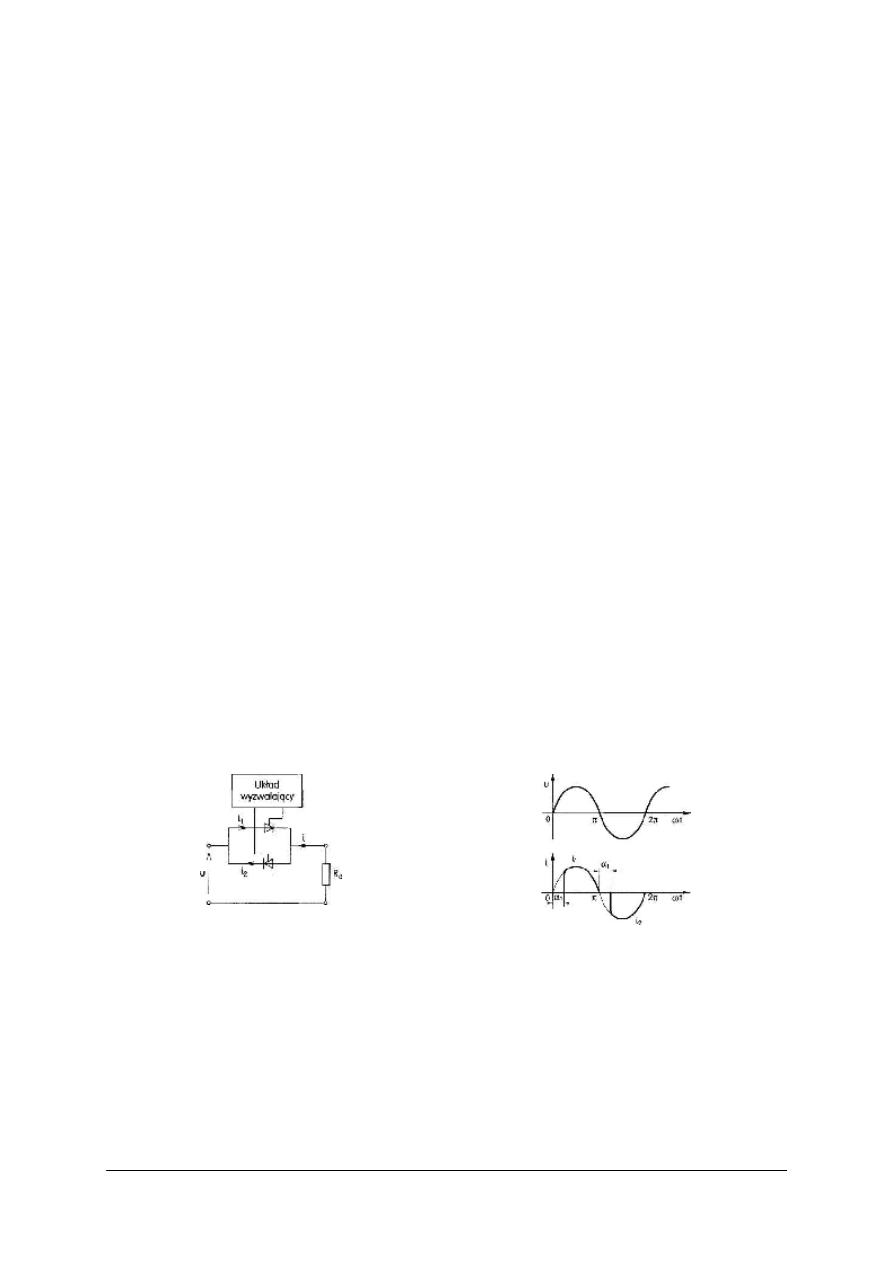
Najprostszym układem sterownika prądu zmiennego jest tzw. układ odwrotnie-równoległy
(rys. 17). Do obwodu zasilania są dołączone przeciwsobnie dwa tyrystory połączone
równolegle. Obydwa elementy są sterowane w taki sposób, że jeden z nich przewodzi
prąd w czasie dodatniej, drugi zaś w czasie ujemnej półfali napięcia zasilania. Przebiegi
sterujące bramką muszą być więc zsynchronizowane z napięciem zasilania.
a)
b)
Rys.17. Sterownik prądu zmiennego: a) schemat, b) przebiegi czasowe napięcia i prądów [1, s.89].
Jeżeli obciążeniem jest rezystancja
O
R , to prąd ma kształt wycinków sinusoidy
zgodnej w fazie z napięciem zasilania (rys. 18b). Regulacja kąta opóźnienia załączania
1
α
powoduje zmianę kąta przepływu prądu, a tym samym jego wartości skutecznej.
Jednocześnie składowa stała prądu jest równa zeru.
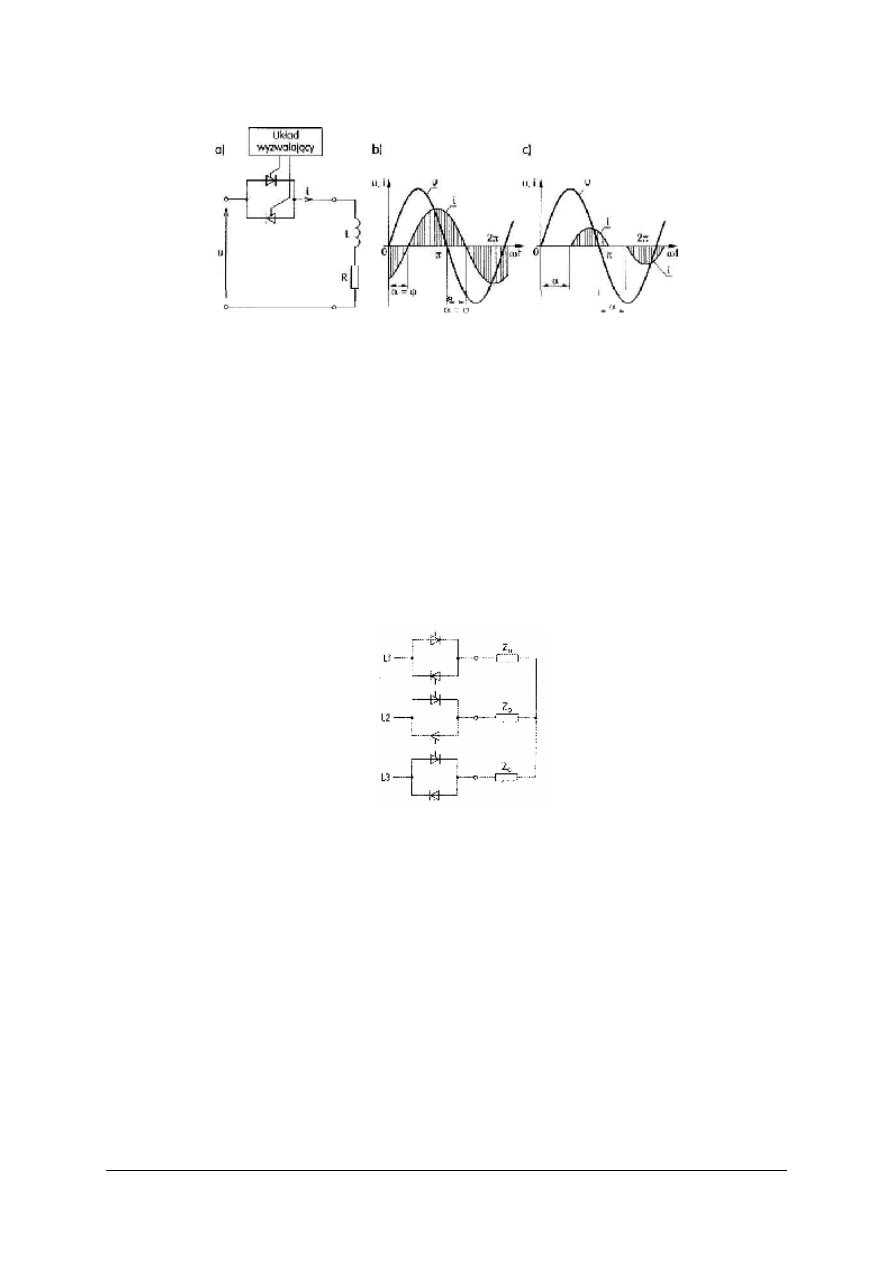
Przy obciążeniu sterownika odbiornikiem rezystancyjno-indukcyjnym (rys. 18), a z takim
charakterem odbiorników najczęściej mamy do czynienia, zwiększenie kąta
1
α opóźnienia
załączenia tyrystora powoduje zmniejszenie wartości skutecznej prądu w obwodzie.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Rys. 18. Sterownik prądu przemiennego obciążonego odbiornikiem rezystancyjno-indukcyjnym: a) schemat;
b), c) przebiegi czasowe napięcia i prądu dla różnych kątów wysterowania [1, s89].
Na rysunku 18b pokazano przebiegi czasowe napięcia i prądu w obwodzie dla kąta
α
wysterowania tyrystora (kąt opóźnienia załączenia) odpowiadającego kątowi fazowemu
ϕ
odbiornika (przesunięcia fazowego napięcia i prądu na odbiorniku). Oba wykresy (prądu
i napięcia) są takie, jak gdyby nie było w obwodzie sterownika, prąd ma przebieg
ciągły. Dla
ϕ
α
<
nie uzyskuje się żadnego efektu sterowniczego, ponieważ niezależnie
od sterownika prąd i tak jest opóźniony względem napięcia, co wynika z charakteru
odbiornika. Dla
π
α
ϕ
<
<
otrzymuje się prąd nieciągły, odkształcony, którego wartość
skuteczna jest mniejsza (rys. 18c).
Jednofazowe sterowniki prądu przemiennego można również stosować do zasilania
odbiorników trójfazowych, wówczas sterowniki są przyłączane do obwodu każdej fazy
(rys. 19).
Rys. 19. Schemat trójfazowego sterownika odwrotnie równoległego [1, s.90].
Ze względu na dużą niezawodność i sprawność, a także małe wymiary, sterowniki
prądu przemiennego znalazły zastosowanie w układach regulacji natężenia oświetlenia
pomieszczeń mieszkalnych (ściemniaczach światła) i regulacji, w sposób ciągły, natężenia
oświetlenia w salach teatralnych i kinowych oraz w układach automatyki napędu
elektrycznego.
Sterowniki prądu stałego
Głównymi układami należącymi do sterowników prądu stałego są łączniki tyrystorowe
prądu stałego. Działają podobnie jak łączniki prądu zmiennego. Jednakże w tym przypadku
niezbędny jest obwód umożliwiający przejście tyrystora ze stanu przewodzenia w stan
nieprzewodzenia (blokowania) i tym samym odłączenie obciążenia od źródła napięcia
stałego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
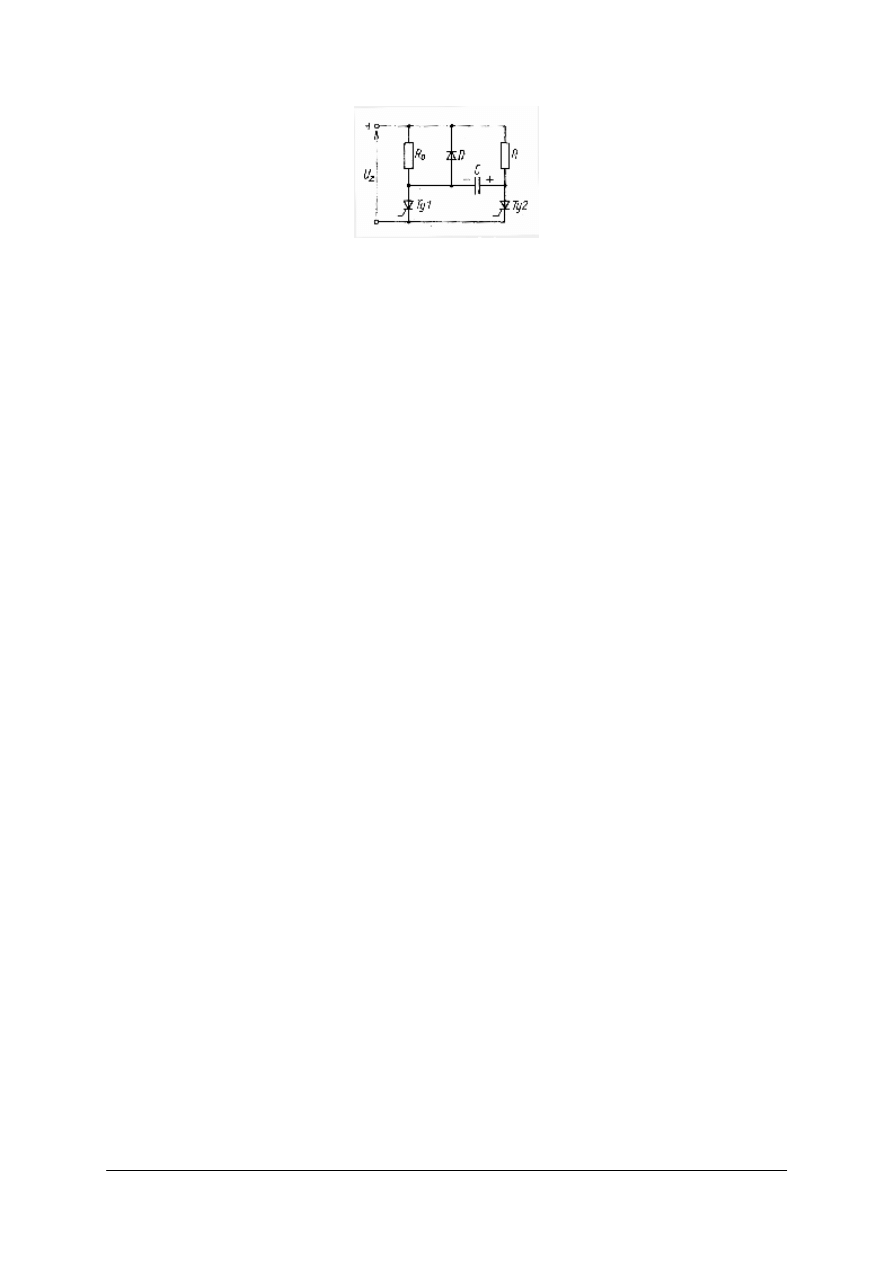
Rys. 20. Schemat tyrystorowego łącznika prądu stałego [3, s. 142].
Jedno z podstawowych rozwiązań łącznika prądu stałego pokazuje rys. 20. Tyrystor
1
Ty
i obciążenie
O
R tworzą obwód szeregowy, zasilany ze źródła napięcia stałego
Z
U .
Kondensator C , rezystor R i tyrystor
2
Ty służą do wyłączania tyrystora
1
Ty . Załączenie
tyrystora
1
Ty następuje po doprowadzeniu impulsu do jego bramki. Tyrystor
2
Ty przy tym
nie przewodzi, kondensator C ładuje się przez rezystor R do napięcia równego prawie
napięciu zasilania. Załączenie tyrystora
2
Ty przez doprowadzenie do jego bramki impulsu
wyzwalającego powoduje dołączenie kondensatora C równolegle do tyrystora
1
Ty , wskutek
czego tyrystor
1
Ty zostaje spolaryzowany w kierunku wstecznym i wyłączony.
Łączniki tyrystorowe prądu stałego spełniają funkcje:
−
łączników manewrowych o praktycznie dowolnej częstości łączeń;
−
sterowników impulsowych;
−
szybkich wyłączników zwarciowych.
Najczęściej są stosowane w napędach prądu stałego, w technice zabezpieczeń, a także do
zasilania i sterowania zgrzewarek punktowych i liniowych oraz do stabilizacji napięcia.
W układach napędowych prądu stałego łączniki tyrystorowe stosuje się do łagodnego
rozruchu i hamowania oraz regulacji prędkości wirowania. Pełnią one funkcje sterowników.
Używa się ich w nowoczesnych trakcjach kopalnianych, miejskiej (tramwaje, trolejbusy),
w wózkach akumulatorowych i samochodach elektrycznych.
Sterowniki stycznikowo-przekaźnikowe
Sterowniki stycznikowo – przekaźnikowe są nazywane obwodami sterowania
i sygnalizacji urządzeń elektrycznych W obwodach sterowania i sygnalizacji maszyn
i urządzeń stosuje się przekaźniki, styczniki, oraz różnego rodzaju zabezpieczenia, które są
uruchamiane przez przyciski sterujące. Podstawowymi układami tej grupy są:
−
układy START – STOP,
−
układy kolejnościowe,
−
układy z blokadami,
−
układ gwiazda – trójkat,
−
układ Dahlandera.
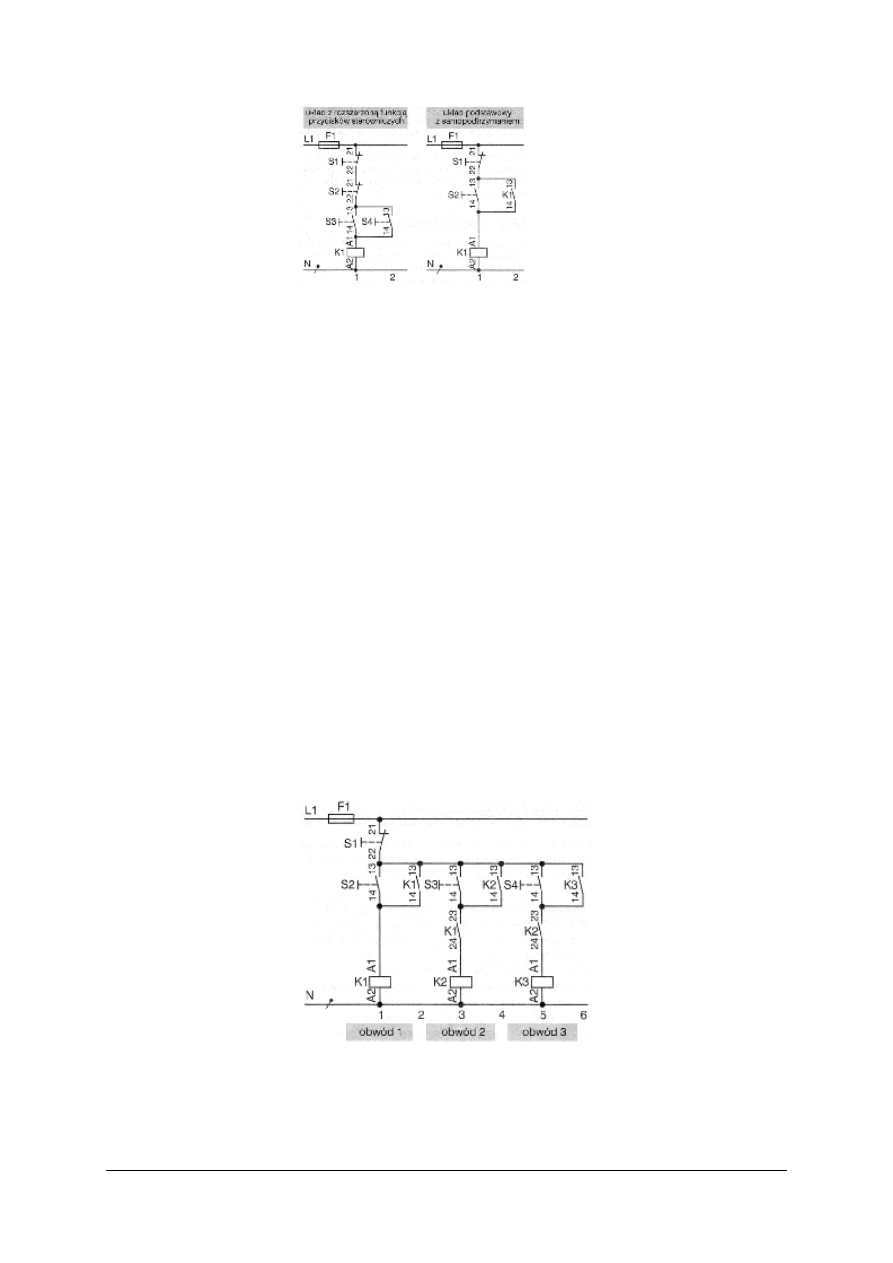
Układy START – STOP
W układach tych funkcje sterujące uzyskuje się przez dołączenie kolejnych przycisków.
Funkcję przycisku STOP można powielić łącząc szeregowo styki bierne wszystkich tego typu
przycisków, np. S1, S2(rys. 21).
Funkcję przycisku START można powielić łącząc równolegle styki czynne wszystkich tego
typu przycisków, np. S3, S4.
Przyciski STOP łączy się szeregowo, przyciski START równolegle.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Rys. 21. Układy START STOP [1, s. 95].
W układzie z podtrzymaniem (rys.21) doprowadza się napięcie do cewki stycznika przez
krótkie naciśnięcie przycisku załączającego S2. Pod wpływem powstającego pola
magnetycznego zostaje przyciągnięta kotwica, która porusza styki główne i pomocnicze.
Zestyk czynny 13, 14, połączony równolegle z przyciskiem S2, mostkuje go. Gdy przycisk S2
powróci do położenia spoczynkowego, stycznik podtrzymuje swoje zasilanie przez własny
zestyk pomocniczy (podtrzymujący). W celu wyłączenia stycznika należy krótko nacisnąć
przycisk wytaczający S1.
Styki podtrzymujące, czyli pomocnicze, są to styki czynne. Włącza się je równolegle do
przycisków START.
Przy zaniku napięcia zasilającego stycznik się wyłącza. Można go później znowu załączyć
przez ponowne naciśnięcie przycisku START. Silniki nie mogą po zaniku napięcia ruszać
samoczynnie.
Układy kolejnościowe
W układach kolejnościowych łączenia mogą nastąpić tylko w ustalonym porządku.
W układzie przedstawionym na rys. 25 stycznik K2 może załączyć tylko pod warunkiem, że
styk czynny 23, 24 stycznika K1 w obwodzie 3 jest zamknięty. W układzie sterowania trzech
taśmociągów (rys. 22), taśmociąg 1 (K1) jest włączany bezpośrednio. Taśmociąg 2 można
uruchomić dopiero wtedy, gdy taśmociąg 1 jest już w ruchu, a taśmociąg 3 dopiero po
uruchomieniu taśmociągów 1 i 2.
Rys. 22. Układ sterowania kolejnościowego [1, s. 95].
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
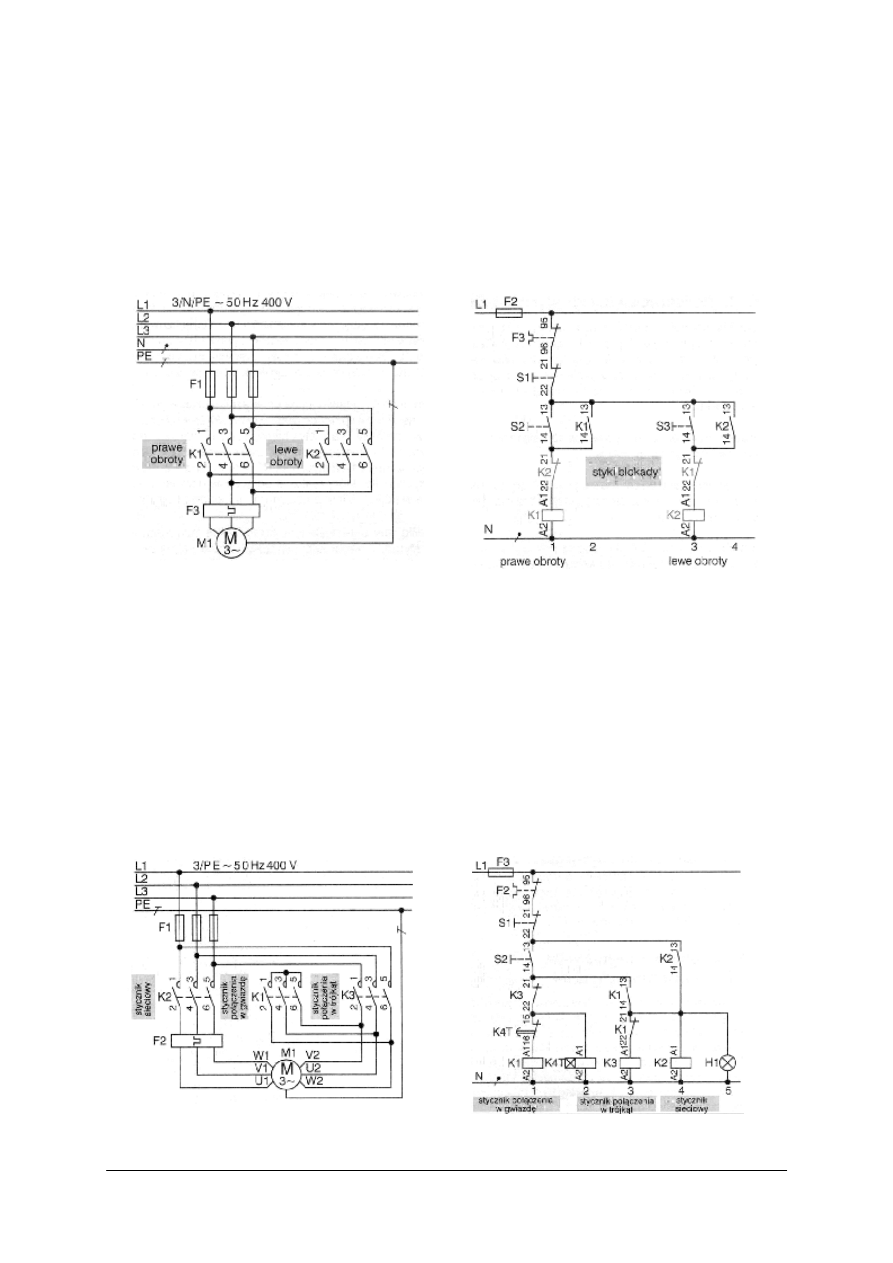
Układ z blokadami
Układy te zabezpieczają przed jednoczesnym wykonaniem dwóch załączeń, przykładem
jest układ nawrotny (rys. 23). W układzie nawrotnym styczniki K1 (bieg w prawo) i K2 (bieg
w lewo) nie mogą być załączone jednocześnie. W tym wypadku jednoczesne załączenie
styków głównych, zamieniające miejsca przyłączenia przewodów L1 i L3, spowodowałoby
zwarcie. Jeżeli stycznik K1 jest włączony, to jego zestyk blokady (zestyk bierny 21, 22)
w obwodzie 3 uniemożliwia załączenie stycznika K2.
a)
b)
Rys.23. Układ nawrotny a) obwód główny, b) układ sterowania z blokadą [1, s. 95,96].
Układ gwiazda–trójkąt
Przy załączaniu silników trójfazowych prąd rozruchu przekracza wielokrotnie wartość prądu
znamionowego. Dlatego przy mocach silników od 5,2 kW dostawca energii wymaga stosowania
metody rozruchu zmniejszającej prąd rozruchowy, np. rozruchu w układzie gwiazda-trójkąt (rys.
24a).
Rozruch metodą gwiazda-trójkąt można wykonać przy użyciu przełączników ręcznych, np.
łącznika krzywkowego, albo w układzie stycznikowym.
Wyzwalacze nadprądowe, umieszczone w układzie Y-
∆
przed zaciskami silnika, powinny być
nastawione na wartość 0,58 prądu znamionowego silnika.
a)
b)
Rys. 24. Układ gwiazda trójkąt, a) obwód główny, b) układ sterowania automatycznego [1, s. 96].
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
W stycznikowym układzie gwiazda–trójkąt ze sterowaniem automatycznym (rys. 24b), przez
naciśnięcie przycisku S2 załączy się stycznik K1 w obwodzie 1 i jednocześnie na cewkę
przekaźnika czasowego K4T w obwodzie 2 podane jest napięcie. Zestyki główne stycznika
K1 (1-2, 3-4 i 5-6) łączą uzwojenia silnika w gwiazdę. Zestyk czynny 13-14 stycznika K1
w obwodzie 3 załącza napięcie wzbudzenia na cewkę stycznika K2 znajdującego się
w obwodzie 4. Podtrzymanie załączenia styczników K1 i K2 realizowane jest w obwodzie 4
przez zestyk czynny 13-14 stycznika K2. Dzięki zwarciu zestyków głównych styczników K1
i K2 silnik pracuje w układzie gwiazdowym.
Po kilkusekundowej zwłoce czasowej (ustawionej na przekaźniku czasowym) przekaźnik
K4T załącza, czyli otwiera zestyk bierny 15-16 i odłącza w obwodzie 1 napięcie zasilające
cewkę stycznika K1. Zestyk czynny 21 -22 stycznika K1 w obwodzie 3 załącza stycznik K3,
który realizuje połączenie uzwojeń silnika w trójkąt. Silnik pracuje teraz w układzie trójkąta.
Blokady uniemożliwiają jednoczesne załączenie styczników realizujących połączenie
uzwojeń silnika w gwiazdę i w trójką
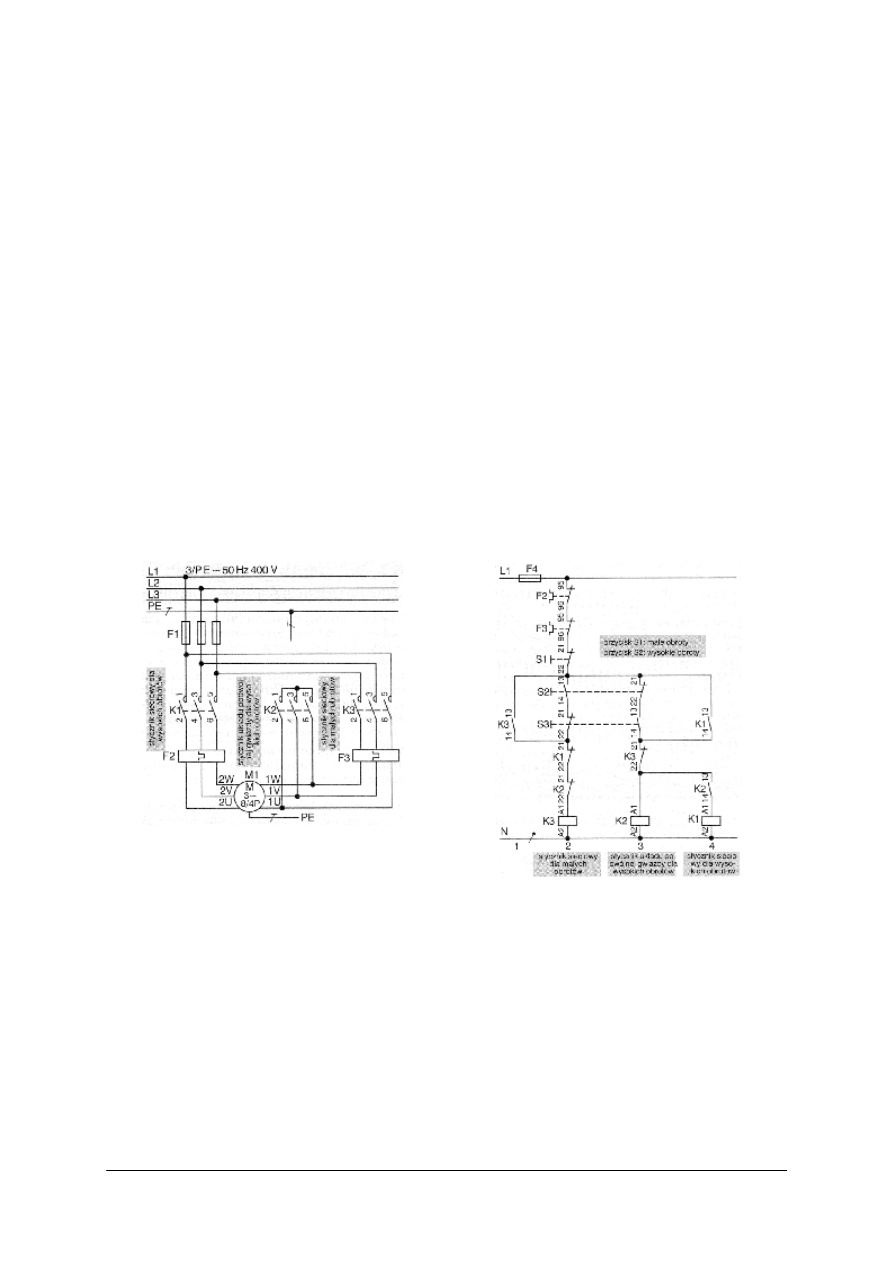
Układ Dahlandera
W silnikach trójfazowych o dwóch prędkościach obrotowych w stosunku 1:2, np.
1440/2880 obr/min, uzwojenie stojana jest wykonywane w układzie Dahlandera (rys. 25).
Przy małej prędkości uzwojenie to jest połączone w trójkąt, zaś przy dużej prędkości
w podwójną gwiazdę.
a)
b)
Rys. 25. Układ Dahlandera, a) obwód główny, b) obwód sterujący [1, s. 97].
Po naciśnięciu przycisku S1 załącza stycznik K3, zestyk 13-14 realizuje podtrzymanie.
Zestyki główne stycznika K3 podają napięcie na zaciski silnika 1U, 1V i 1W. Wskutek tego
silnik pracuje z małą prędkością. Po naciśnięciu przycisku S2 włącza się duża prędkość.
Stycznik K2 (stycznik podwójnej gwiazdy) załącza się, a przez jego zestyk 13-14 załącza
również stycznik K1 (stycznik sieciowy dla dużej prędkości). Stycznik K2 łączy zaciski
silnika 1U, 1V i 1W w punkt środkowy gwiazdy. Podtrzymanie załączenia styczników K1
i K2 odbywa się przez zestyk 13-14 stycznika K1 w obwodzie 4. Zaciski silnika 2U, 2V i 2W
są połączone z siecią zasilającą przez zestyki główne stycznika K1. Silnik pracuje z dużą
prędkością.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Oznaczenia zacisków silnika:
−
Mała prędkości 1U, 1V, 1W,
−
Duża prędkość 2U, 2V, 2W.
Bezpośrednie przełączenie z malej prędkości na dużą nie jest możliwe, ponieważ zestyk
podtrzymujący 13–14 stycznika K3 mostkuje zestyk bierny 21–22 przycisku S3. Przełączanie
prędkości każdorazowo wymaga użycia przycisku S1.
W celu bezpośredniego przełączania prędkości należy tak włączyć styki pomocnicze 13–14
stycznika K3 oraz 13–14 stycznika K1, żeby mostkowały tylko zestyki czynne przycisków
S2 i S3.
W układzie Dahlandera pobór prądu silnika
przy
obydwu prędkościach jest
różny. Z
tego
względu dla
każdej prędkości należy zastosować
oddzielny
wyzwalacz
nadprądowy
.
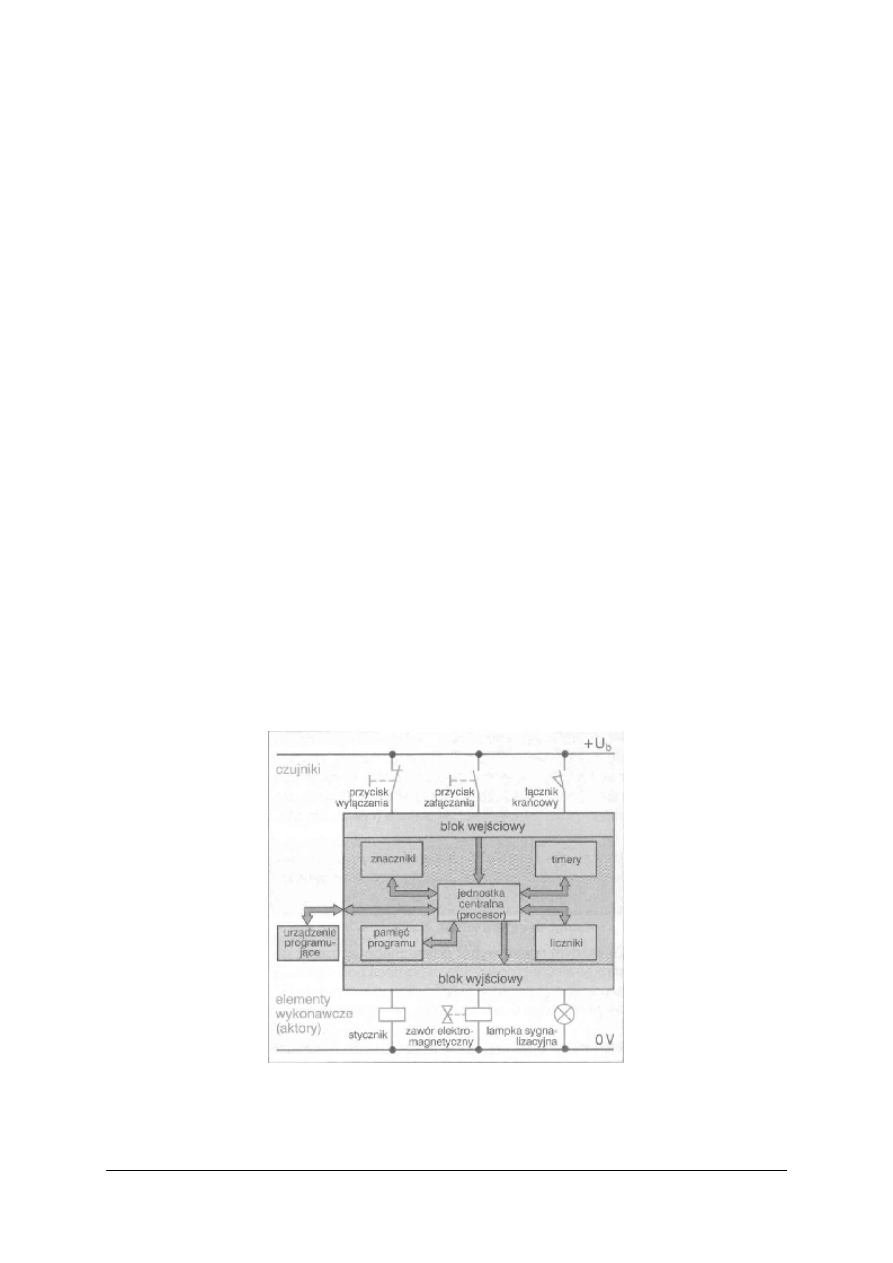
Sterowniki programowalne PLC
Sterowniki logiczne PLC (PLC – ang. Programmable Logic Controller) są to układy
elektroniczne, które za pomocą programu zawartego w ich pamięci sterują pracą urządzeń.
Sterowniki te można swobodnie przeprogramować – zmiana programu. Dlatego mają tak
wielką przewagę nad klasycznymi stycznikowo-przekaźnikowymi układami sterowania, które
można zmienić jedynie przez zmianę schematu okablowania (programowanymi przez
okablowanie).
Na rys. 26 pokazano budowę programowalnego sterownika logicznego PLC. Procesy
zachodzące wewnątrz są sterowane przez mikroprocesor. Mikroprocesor jest połączony za
pośrednictwem magistrali z blokami wejść i wyjść, znacznikami, licznikami czasu (timerami),
licznikami zdarzeń i pamięcią programu. Program użytkowy (program działania układu
sterującego) wpisuje się do pamięci za pomocą urządzenia programującego.
Znaczniki są to wewnętrzne bloki pamięci służące do przechowywania częściowych
i końcowych wyników operacji logicznych. Liczniki zdarzeń i liczniki czasu (timery) sterowane
są przez jednostkę centralną i w razie potrzeby mogą być wykorzystane przez program sterujący,
Sygnały z czujników, np. przycisków, sterują blok wejściowy. Elementy wykonawcze (aktory),
np. styczniki, są sterowane przez blok wyjściowy.
Rys. 26. Budowa sterownika PLC [1, s. 100].
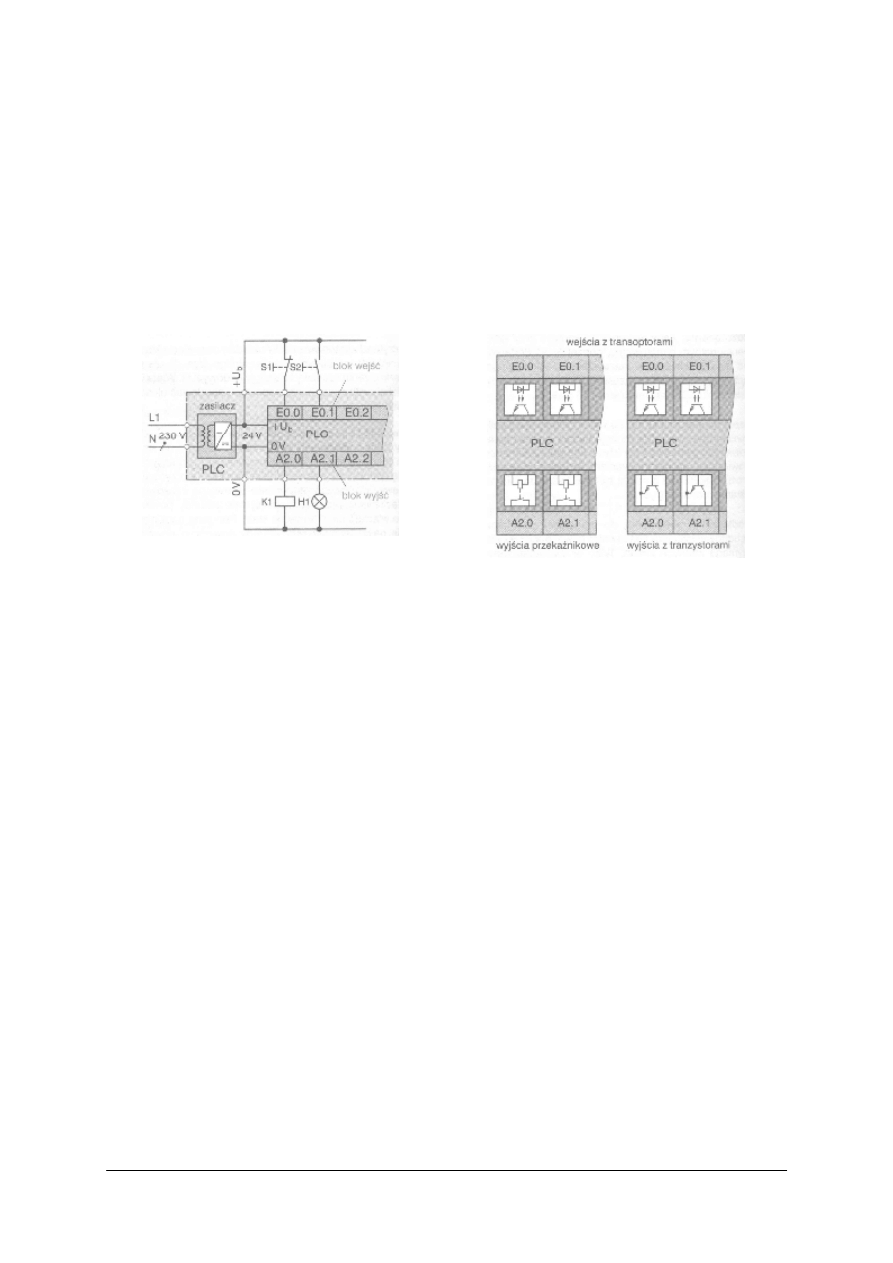
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Sterownik programowalny jest zasilany z zasilacza napięcia stałego (rys. 27a). Napięcie
wyjściowe zasilacza (24 V DC) jest wykorzystywane do zasilania czujników i elementów
wykonawczych.
Każde źródło sygnału (czujnik) jest indywidualnie połączone z jednym z wejść sterownika
programowalnego i z napięciem zasilającym.
Sygnały z czujników sterują przez transoptory wejścia sterownika (rys. 27b). Producenci
sterowników logicznych oferują do wyboru wyjścia zaopatrzone w łączniki półprzewodnikowe
(np. tranzystory) albo w przekaźniki. W wypadku przekaźników doprowadzenia styków są
wyprowadzone bezpośrednio na zewnątrz; styki mają izolację galwaniczną.
a)
b)
Rys. 27. Sterownik PLC a) połączenie sterownika, b) bloki wejść i wyjść [1, s. 100].
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka jest definicja sterownika?
2. Jaka jest zasada działania sterownika prądu zmiennego?
3. Jakie znasz układy należące do grupy sterowników stycznikowo-przekaźnikowych?
4. Jaka jest zasada działania poszczególnych układów stycznikowo-przekaźnikowych?
5. Co to jest sterownik PLC?
6. Jaka jest budowa sterownika PLC?
7. Jakie są zastosownia poszczególnych sterowników?
4.5.3. Ćwiczenia
Ćwiczenie 1
Zmontuj układ sterownia włączaniem i wyłączaniem dwóch odbiorników. Odbiornik A
musi być włączony jako pierwszy, odbiornik B włączany drugi. Wyłączenie odbiorników
odbywa się jednocześnie. Montaż wykonaj w oparciu o instrukcję i dokumentację daną przez
nauczyciela.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) pobrać materiały, narzędzia, mierniki, instrukcję i dokumentację,
2) stosować przepisy BHP podczas pracy,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
3) wykonać montaż zgodnie z dokumentacją i instrukcją,
4) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania,
−
instrukcja, dokumentacja,
−
materiały: styczniki, przewody, listwy monatażowe,
−
narzędzia, mierniki.
Ćwiczenie 2
Zaprojektuj sposób zastąpienia układu sterowania z ćwiczenia 1 sterownikiem PLC.
Ćwiczenie wykonaj korzystając z poradnika dla ucznia (rozdział 4.4.1.), katalogu
sterowników PLC, instrukcji.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wyszukać odpowiedni sterownik z katalogu,
2) wypisać w zeszycie parametry wybranego sterownika,
3) narysować w zeszycie schemat połączeń wybranego sterownika na podstawie instrukcji
stanowiskowej,
4) zaprezentować wykonanie ćwiczenia.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania,
−
katalog sterowników PLC,
−
instrukcja stanowiskowa.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) zdefiniować pojęcie sterownika?
2) podać rodzaje sterowników?
3) wyjaśnić zasadę działania sterowników prądu zmiennego i stałego?
4) podać przykłady sterowników prądu zmiennego i stałego?
5) podać podstawowe układy stycznikowo przekaźnikowe?
6) wyjaśnić zasadę działania układów stycznikowo przekaźnikowych?
7) wyjaśnić co to jest sterownik PLC?
8) podać zasadę działania i budowę sterownika PLC?
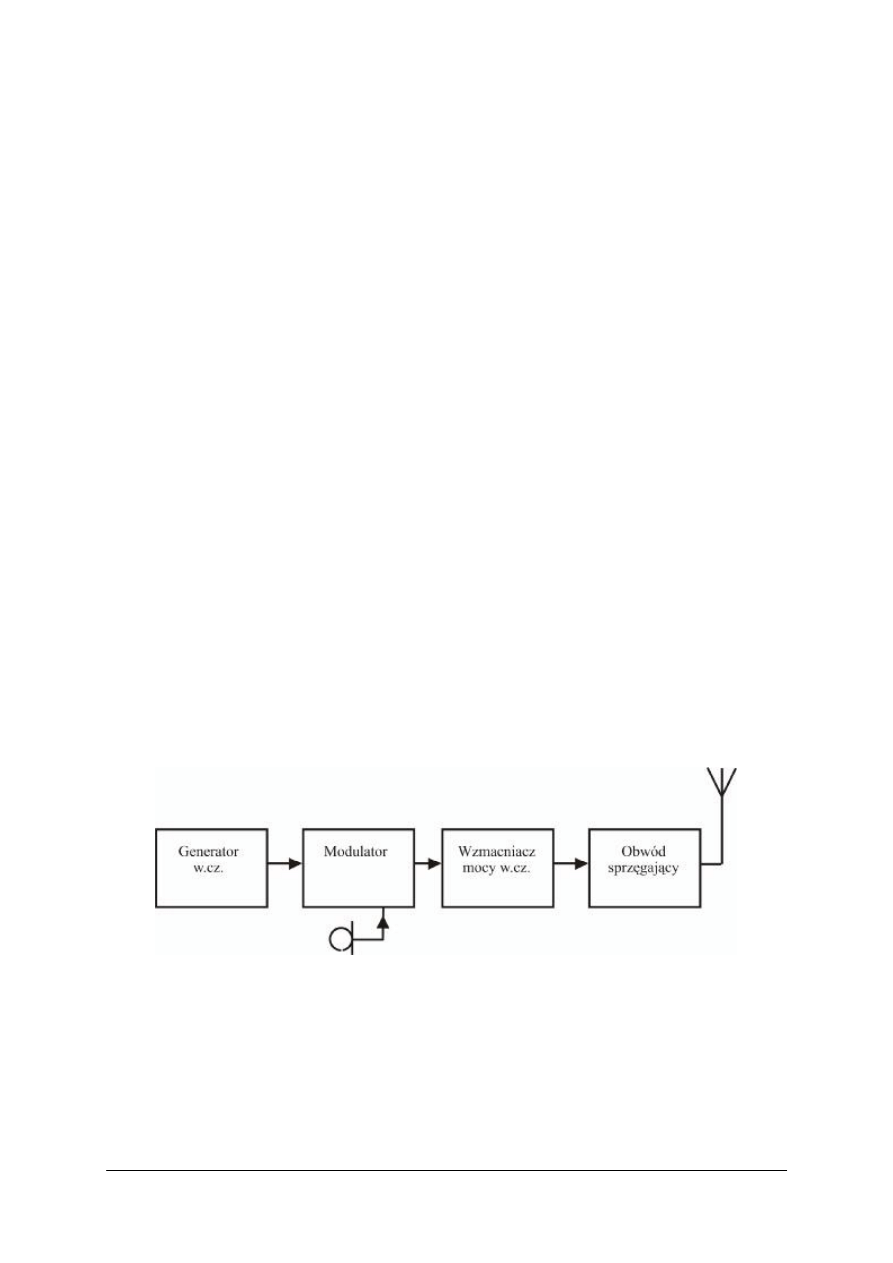
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
4.6. Urządzenia radiowe i telewizyjne
4.6.1. Materiał nauczania
Modulacja sygnału
Sygnał akustyczny (np. mowy, muzyki) występuje w postaci drgań mechanicznych. Za
pomocą przetwornika (np. mikrofonu) przetwarzany jest na sygnał elektryczny. Sygnał
elektryczny wychodzący z mikrofonu charakteryzuje się małą częstotliwością i nazywamy go
sygnałem m.cz. Do przesyłania otrzymanego sygnału drogą radiową używa się innego
sygnału elektrycznego (sygnału fali nośnej) o znacznie większej częstotliości, na który
nakłada się sygnał akustyczny pochodzący z przetwornika (mikrofon). Proces ten nazywamy
modulacją. Wyróżniamy trzy typy modulacji:
−
modulacja AM (amplitudy) – sygnał fali nośnej jest zmieniany zgodnie ze zmianą
amplitudy sygnału m.cz.,
−
modulacja FM (częstotliwości) – sygnał fali nośnej jest zmieniany zgodnie ze zmianą
częstotliwości sygnału m.cz.,
−
modulacja PM (fazy) – sygnał fali nośnej jest zmieniany zgodnie ze zmianą fazy m.cz.
Urządzenia radiowe nadawcze
Na rys. 28 przedstawiono schemat nadajnika radiowego, w którym modulacja amplitudy
odbywa się w stopniu małej mocy. Sygnał akustyczny mowy lub muzyki jest przetwarzany
przez mikrofon na sygnał elektryczny i następnie wzmacniany. W stopniu małej mocy
moduluje się sygnałem m.cz. (akustycznym) amplitudę sygnału w.cz. Zmodulowany sygnał
w.cz. jest wzmacniany przez wzmacniacz mocy w.cz. Wzmacniacz mocy w.cz. musi mieć
liniową charakterystykę amplitudową.
Wzmacniacze w.cz. mogą pracować jako wzmacniacze selektywne lub jako wzmacniacze
aperiodyczne. Selektywne wzmacniacze mocy w.cz. o liniowej charakterystyce amplitudowej
mogą pracować w klasie B, AB lub A. Wzmacniacze aperiodyczne o liniowej charakterystyce
muszą pracować w klasie A.
Rys. 28. Schemat blokowy nadajnika radiowego.
W stopniach końcowych jako wzmacniacze mocy w.cz. o liniowej charakterystyce
amplitudowej są stosowane najczęściej wzmacniacze selektywne.
W rozwiązaniach praktycznych nadajników radiowych najczęściej stosuje się modulację
amplitudy sygnału w.cz. w stopniu mocy w.cz. (rys. 29). Wzmacniacz mocy w.cz., w którym
jest modulowana amplituda sygnału w.cz. może pracować w klasie B lub C. Między anteną
a wzmacniaczem mocy znajduje się obwód sprzęgający.
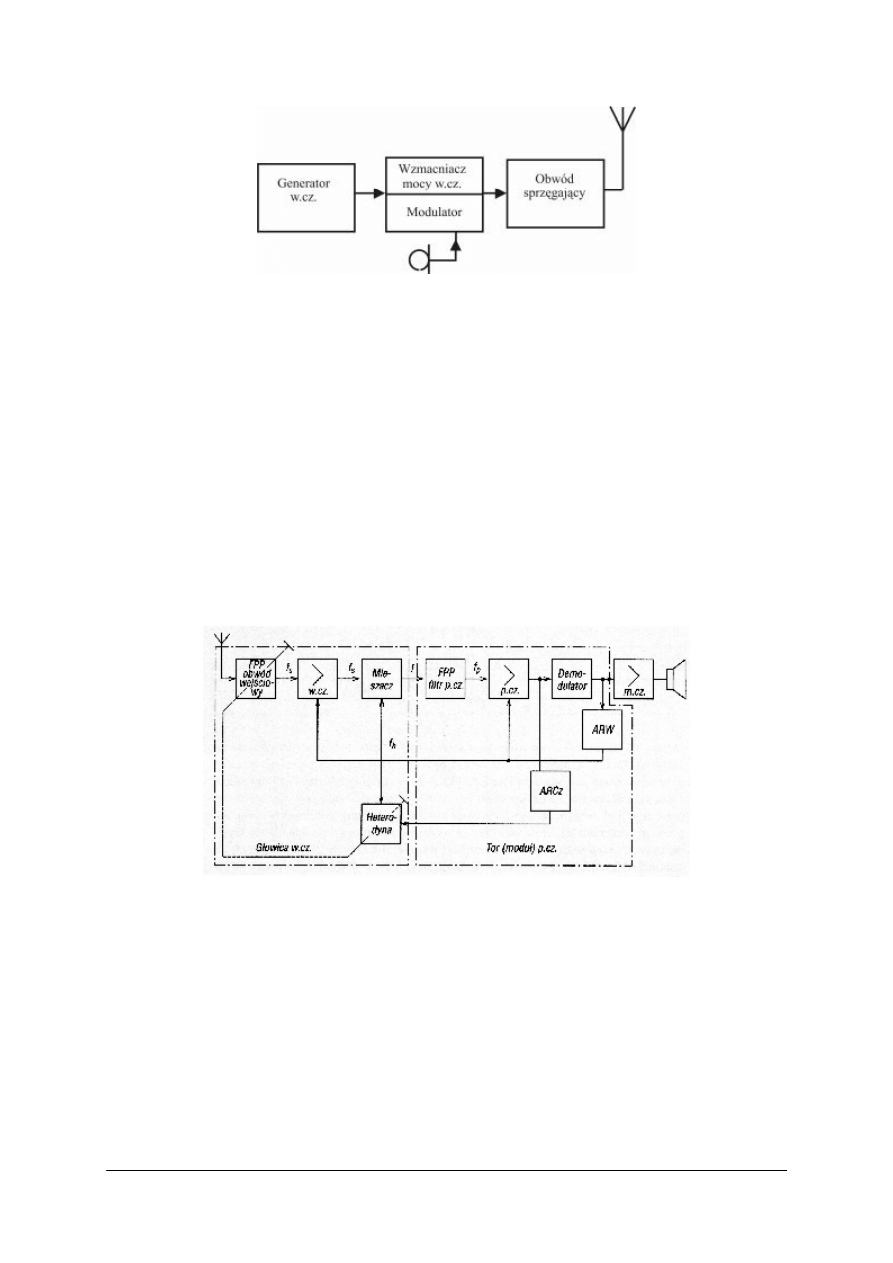
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Rys. 29. Nadajnik z modulacja w stopniu dużej mocy.
Obwód sprzęgający pozwala na dopasowanie impedancji anteny do impedancji wyjściowej
wzmacniacza mocy w.cz. Obwód sprzęgający dodatkowo tłumi niepożądane składowe
harmoniczne sygnału w.cz.
Urządzenia radiowe odbiorcze
Na rys. 30 przedstawiono schemat funkcjonalny typowego odbiornika radiowego
superheterodynowego. W stosunku do schematu przedstawionego w części pierwszej
podręcznika zawiera on dodatkowo układy: ARW (automatycznej regulacji wzmocnienia)
i ARCz (automatycznej regulacji częstotliwości). W antenie indukują się sygnały pochodzące
od różnych nadajników. Prawie zawsze widmo każdego z tych sygnałów przypada na inny
zakres (pasmo) częstotliwości. W układach wejściowych odbiornika radiowego (w filtrze
środkowoprzepustowym FPP) następuje wydzielenie sygnału interesującej nas stacji o paśmie
częstotliwościowym skupionym wokół częstotliwości
s
f .
Rys. 30. Schemat blokowy odbiornika radiowego [5, s. 358].
We wzmacniaczu w.cz. amplituda sygnału jest wzmacniana kilkakrotnie, nie zmienia się
natomiast jego częstotliwość.
Wzmocniony sygnał jest podawany na wejście układu przemiany częstotliwości, składającego
się z mieszacza, heterodyny (lokalnego generatora przebiegu sinusoidalnego) i filtru
środkowoprzepustowego. W układzie tym sygnału jest zamieniany z częstotliwości
s
f ,
w częstotliwość
p
f . Wartość częstotliwości pośredniej
p
f jest stała dla danego rodzaju
modulacji i wynosi: 465 kHz dla modulacji AM, i 10,7 MHz dla modulacji FM. Aby układ
ten działał prawidłowo, należy tak dobrać częstotliwość
h
f generowaną przez heterodynę do

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
częstotliwości
s
f (do jakiej są dostrojone obwody wejściowe), by spełnione zostało
równanie:
p
h
s
f
f
f
−
=
Wynika z powyższego, że układy wejściowe muszą być przestrajane jednocześnie
z generatorem lokalnym (heterodyna), aby powyższy warunek był spełniony w całym
zakresie odbieranych częstotliwości.
Z wyjścia układu przemiany częstotliwości sygnał jest podawany na wzmacniacz pośredniej
częstotliwości, w którym następuje kolejne jego wzmocnienie. Ze wzmacniacza p.cz. sygnał
przesyłany jest na demodulator (AM lub FM, w zależności od rodzaju modulacji użytej
w nadajniku), gdzie przywraca mu się pierwotny kształt (i widmo) w zakresie małych
częstotliwości. We wzmacniaczu mocy m.cz. sygnał ten (elektryczny) jest wzmacniany,
a następnie w głośniku przetwarzany na drgania mechaniczne (akustyczne).
Układ ARW.
Jego zadaniem jest taka regulacja wzmocnienia wzmacniacza w.cz. i p.cz., aby sygnał
wyjściowy z demodulatora przyjmował stałą wartość niezależnie od tego, z jakiej stacji
nadawczej pochodzi odbierany sygnał (tzn. by dźwięk odbierany ze wszystkich stacji
radiowych miał jednakowy poziom głośności). Układ ARW steruje wzmocnieniem
wzmacniaczy w taki sposób, że małej wartości sygnału wyjściowego z demodulatora
odpowiada duże wzmocnienie wzmacniaczy w.cz. i p.cz. Dzięki temu uzyskuje się
stabilizację poziomu napięcia wyjściowego z demodulatora.
Układ ARCz
Przy niewielkich zmianach częstotliwości sygnału podawanego na wejście demodulatora
FM, na wyjściu odbiornika radiowego uzyskuje się sygnał akustyczny o dużych
zniekształceniach. Układ automatycznej regulacji częstotliwości (ARCz) koryguje dostrojenie
odbiornika radiowego, tzn. dostraja częstotliwości heterodyny tak, aby do demodulatora
docierał sygnał o częstotliwości nośnej
p
f . Regulacja ta jest możliwa w niewielkim zakresie
częstotliwości.
Wzmacniacz w.cz.
Wzmacniacze wielkiej częstotliwości stosowane są w odbiornikach radiowych jako
jednostopniowe układy szerokopasmowe
Wzmczniacz p.cz.
Wzmacniacze pośredniej częstotliwości są to zazwyczaj trzy lub czterostopniowe,
ponieważ sygnał na ich wyjściu musi być znacznie bardziej wzmocniony niż we
wzmacniaczach w.cz.
Mieszacz.
Zadaniem mieszacza jest zmiana częstotliwości nośnej na inną
Demodulator.
Realizuje proces odwrotny do modulowania.
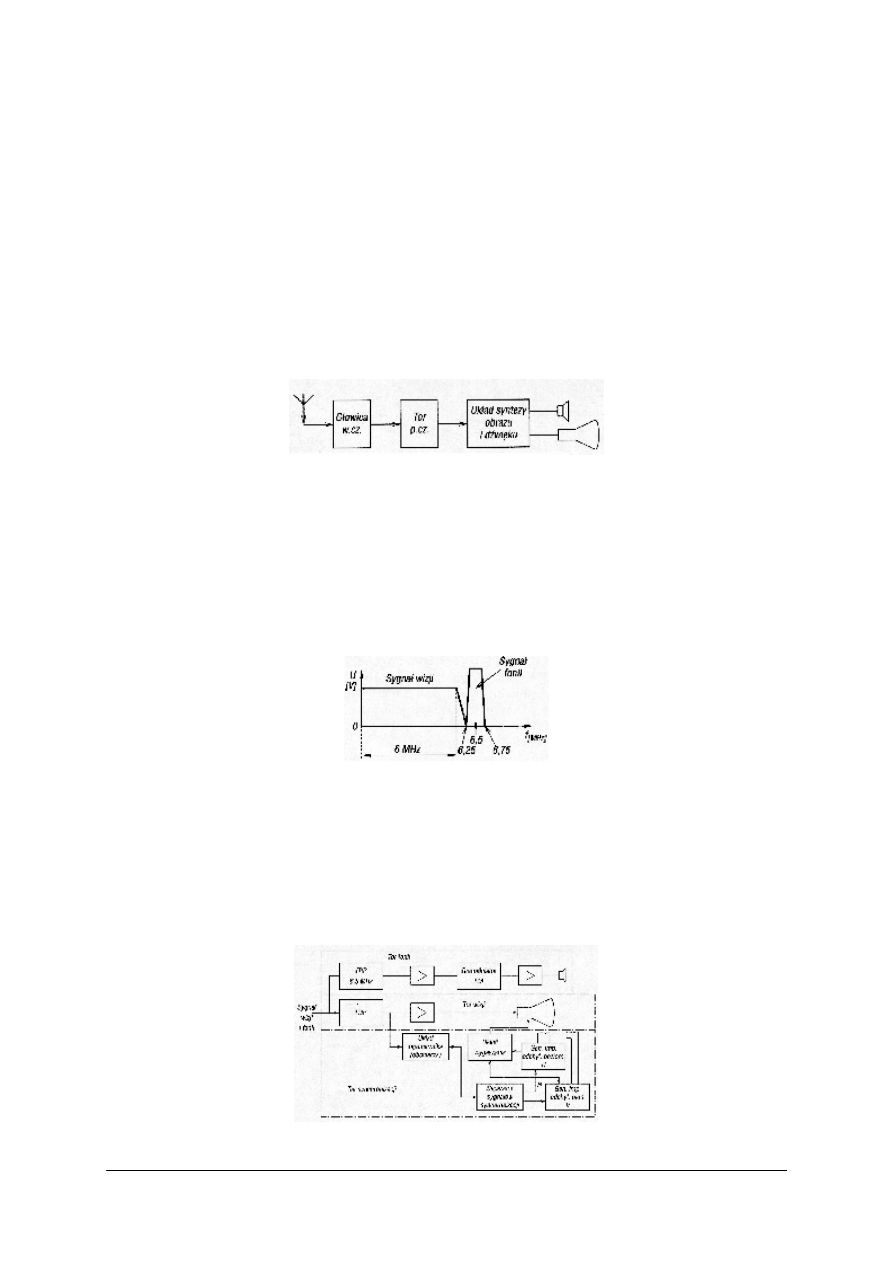
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
Urządzenia telewizyjne – odbiorcze
Na rysunku 31 przedstawiono schemat blokowy odbiornika telewizyjnego.
Antena odbiera wiele nadawanych sygnałów. Obwody wejściowe wydzielają z nich całkowity
sygnał wizji (CSW) żądanej stacji telewizyjnej oraz towarzyszący mu sygnał fonii. Należy
podkreślić, że głowica w.cz. i tor p.cz. przetwarzają współbieżnie dwa sygnały:
−
całkowity sygnał wizji zmodulowany amplitudowo,
−
sygnał fonii zmodulowany częstotliwościowo.
Układ automatycznej regulacji wzmocnienia (ARW) utrzymuje stały poziom sygnału na
wejściu układu syntezy obrazu i dźwięku. Natomiast układ automatycznej regulacji
częstotliwości (ARCz) koryguje dostrojenie obwodów wejściowych i heterodyny do wybranej
stacji telewizyjnej.
Rys. 31. Schemat blokowy odbiornika telewizyjnego [5, s. 375].
Rys. 32 przedstawia sygnał podawany na wejście układu syntezy obrazu i dźwięku. Sygnał
ten składają się z zsumowanych sygnałów.
−
Zmodulowanego częstotliwościowo (FM) sygnału fonii (tzw. sygnał różnicowy fonii)
o częstotliwości nośnej 6,5 MHz (zawiera się on od 6,25 do 6,75 MHz).
−
Całkowitego sygnał wizyjnego, składającego się z sygnału wizji i sygnału synchronizacji,
zawartego od 0 do 6,25 MHz.
Rys. 32. Sygnał podawany na układ syntezy obrazu i dźwięku [5, s. 375].
Sygnały te rozdziela się, stosując filtry częstotliwościowe. Układ syntezy obrazu i dźwięku
składa się z (rys. 33):
−
toru fonii,
−
toru wizji,
−
toru odchylania i synchronizacji.
Rys. 33. Schemat blokowy układu syntezy obrazu i dźwięku [5, s. 376].
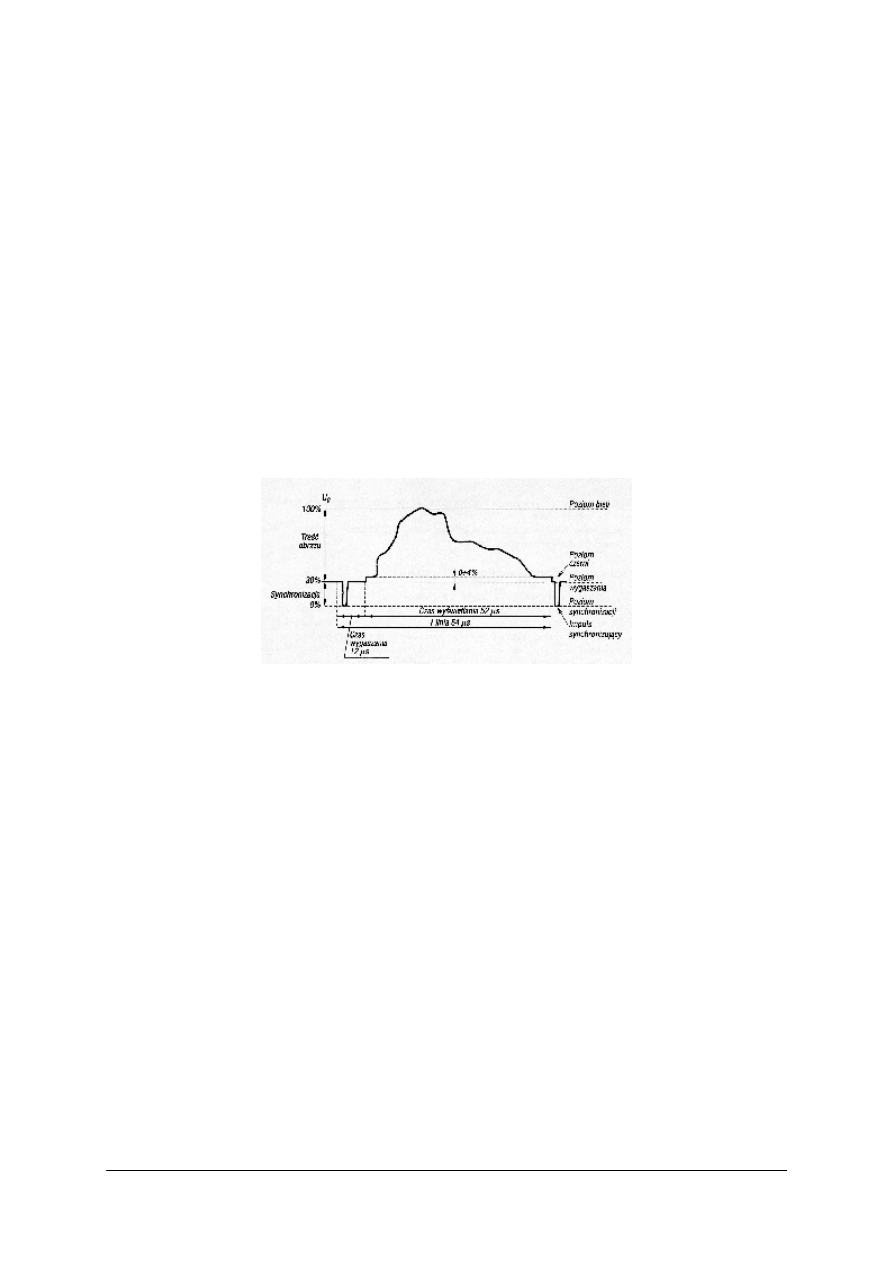
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
W torze fonii następuje wydzielenie sygnału fonii z całkowitego sygnału wizyjnego
i przetworzenie go na sygnał akustyczny. Tor ten jest w zasadzie odbiornikiem radiowym
bezpośredniego odbioru przystosowanym do odbioru tylko sygnału FM o częstotliwości
nośnej równej 6,5 MHz. Na jego wejściu stosuje się ceramiczne filtry środkowoprzepustowe.
Dalsza część toru fonii jest taka sama jak w odbiornikach radiowych. Zwykle są one
wykonywane jako jeden moduł (w odbiornikach o budowie modułowej).
Tor wizji służy do przetworzenia wejściowego całkowitego sygnału wizyjnego w obraz.
Informacja o jaskrawości (luminacji) obrazu jest przekazywana kolejno jako informacja
o jaskrawości poszczególnych (kolejno następujących po sobie) punktów na analizowanej
linii, to synteza obrazu następuje w wyniku zmiany jaskrawości świecącego punktu
przesuwającego się po ekranie kineskopu zgodnie z fazą odbieranego sygnału.
W torze wizji składowa stała całkowitego sygnału wizji moduluje jaskrawość świecącego
punktu – wzmocniony sygnał luminancji zmienia wydajność wiązki elektronowej emitowanej
w kineskopie, natomiast w torze synchronizacji wiązka elektronowa jest odchylana
w poziomie (z częstotliwością 15 625 Hz) i w pionie (z częstotliwością 50 Hz) współbieżnie
z nadchodzącym sygnałem luminancji. Sygnał zawierający treść obrazu jest oddzielony od
sygnału synchronizacji, określającego, która linia będzie aktualnie wyświetlona (rys. 34).
Rys. 34. Sygnał wizji i synchronizacji [5, s. 377].
Na przykład, ta część sygnału wizji, której napięcie jest większe od napięcia progowego
U
p
=0,3U
0
jest sygnałem luminancji, natomiast ta część sygnału wizji, której napięcie jest
mniejsze od napięcia U
p
jest sygnałem synchronizacji. Sygnały luminacji i synchronizacji są
rozdzielone w czasie. W czasie przeznaczonym na przesłanie jednej linii obrazu (64
µ
s)
sygnał luminancji jest przesyłany przez 52
µ
s, a sygnał synchronizacji przez 12
µ
s.
W czasie przeznaczonym na przesłanie sygnału luminacji w jednej linii obrazu wiązka
elektronowa kreśli daną linię, przesuwając świecący punkt od prawej do lewej strony ekranu
kineskopu. W tym samym czasie jest ona tak odchylana, aby zapewnić liniowe przesuwanie
świecącego punktu proporcjonalne do upływu czasu. W czasie przeznaczonym na przesłanie
sygnału synchronizacji wiązka elektronowa musi być wygaszona, aby impulsy synchronizacji
nie były widoczne na ekranie, a układy odchylające tak ustawione, aby z początkiem przyjścia
sygnału luminancji następnej linii rozpoczęło się kreślenie znowu od prawej strony ekranu
o jedną linię niżej niż poprzednio. Ruchy powrotne odbywają się, więc przy wagaszonej
plamce i są niewidoczne.
Wiązka elektronowa jest jednocześnie odchylana w pionie i w poziomie. W celu zmniejszenia
zjawiska migotania obrazu został on podzielony na dwa półobrazy. W jednym półobrazie są
przesyłane linie parzyste, a w drugim nieparzyste. Jeden pełen obraz jest przekazywany za
pomocą 625 linii (podzielonych na dwa półobrazy), z czego bezpośrednio wyświetlanych jest
575 linii, a pozostałe 50 linii służy do przesyłania impulsów synchronizacji półobrazów (tzw.
impulsów synchronizacji ramki) i sygnałów dodatkowych (np. sygnałów testowych i sygnału

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
teletekstu). Półobrazy są transmitowane z częstotliwością 50 półobrazów na sekundę. W celu
wytworzenia obrazu na ekranie, do kineskopu należy doprowadzić:
−
wzmocniony sygnał luminancji,
−
sygnał wygaszania,
−
a do cewek odchylających:
−
sygnał odchylania poziomego,
−
sygnał odchylania pionowego.
Odchylanie wiązki elektronowej następuje w wyniku:
−
wytworzenia w cewkach odchylania poziomego liniowo narastającego przebieguprądu
o częstotliwości 15 625 Hz (o czasie narastania 52
µ
s i opadania 12
µ
s),
−
wytworzenia w cewkach odchylania pionowego liniowo narastającego przebiegu
prądu o częstotliwości 50 Hz.
Przebiegi prądu w cewkach odchylających powstają przez odpowiednie sterowanie ich
z generatorów przebiegów odchylających. Generatory te są synchronizowane sygnałem
synchronizacji, wydzielonym przez układ ogranicznika (obcinacza) z całkowitego sygnału
wizyjnego. Do wzmacniacza wizyjnego jest doprowadzony sygnał wejściowy, z którego za
pomocą filtru dolnoprzepustowego został usunięty sygnał różnicowy fonii.
Sygnał wygaszania jest wynikiem przetworzenia (logicznego) sygnałów z obu generatorów
przebiegów odchylających.
4.6.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Wyjaśnij, co to jest modulacja?
2. Czym się różni modulacja AM od FM od PM?
3. Jaki jest schemat blokowy nadajnika radiowego?
4. Na przykładzie schematu blokowego, wyjaśnij jak działa nadajnik radiowy?
5. Jaki jest schemat blokowy odbiornika radiowego?
6. Na przykładzie schematu blokowego, wyjaśnij jak działa odbiornik radiowy?
7. Jaki jest schemat blokowy odbiornika telewizyjnego?
8. Na przykładzie schematu blokowego, wyjaśnij jak działa odbiornik telewizyjny?
4.6.3 Ćwiczenia
Ćwiczenie 1
Rozmontuj odbiornik radiowy i na płytce drukowanej wyodrębnij poszczególne bloki
funkcjonalne. Ćwiczenie wykonaj w oparciu o materiał zawarty w poradniku oraz instrukcję
i dokumentację demontowanego odbiornika danego przez nauczyciela.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) pobrać materiały, narzędzia, mierniki, instrukcję i dokumentację
2) pobrać odbiornik radiowy do demontażu,
3) stosować przepisy BHP podczas pracy,
4) wykonać demontaż zgodnie z dokumentacją i instrukcją,
5) wyodrębnić na płycie drukowanej bloki funkcjonalne na podstawie dokumentacji
odbiornika i instrukcji,
6) zaprezentować wykonane ćwiczenie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania,
−
instrukcja, dokumentacja odbiornika,
−
materiały: odbiornik radiowy do demontażu,
−
narzędzia, mierniki.
Ćwiczenie 2
Rozmontuj odbiornik telewizyjny i na płycie drukowanej wyodrębnij poszczególne bloki
funkcjonalne. Ćwiczenie wykonaj w oparciu o materiał zawarty w poradniku oraz instrukcję
i dokumentację demontowanego odbiornika danego przez nauczyciela.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) pobrać materiały, narzędzia, mierniki, instrukcję i dokumentację
2) pobrać odbiornik telewizyjny do rozmontowania,
3) stosować przepisy BHP podczas pracy,
4) wykonać demontaż zgodnie z dokumentacją i instrukcją,
5) wyodrębnić na płycie drukowanej bloki funkcjonalne na podstawie dokumentacji
odbiornika i instrukcji,
6) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
poradnik dla ucznia, zeszyt, przybory do pisania,
−
instrukcja, dokumentacja odbiornika,
−
materiały: odbiornik telewizyjny do demontażu,
−
narzędzia, mierniki.
4.6.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zdefiniować pojęcie modulacji?
2) podać rodzaje modulacji?
3) wyjaśnić różnice między rodzajami modulacji?
4) narysować schemat blokowy odbiornika radiowego?
5) wyjaśnić na schemacie blokowym zasadę działania odbiornika
radiowego?
6) narysować schemat blokowy nadajnika radiowego?
7) wyjaśnić na schemacie blokowym zasadę działania nadajnika
radiowego?
8) narysować schemat blokowy odbiornika telewizyjnego?
9) wyjaśnić na schemacie blokowym zasadę działania odbiornika
telewizyjnego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań wielokrotnego wyboru i tylko jedna odpowiedź jest prawidłowa.
5. Za każde poprawnie rozwiązane zadanie uzyskasz 1 punkt.
6. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi
−
prawidłową odpowiedź zaznacz X ( w przypadku pomyłki należy błędną odpowiedź
zaznaczyć kółkiem, a następnie ponownie zakreślić odpowiedź prawidłową)
7. Pracuj samodzielnie bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
8. Kiedy udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego
rozwiązanie na później i wróć do niego, gdy zostanie Ci wolny czas. Trudności mogą
przysporzyć Ci zadania 15, 19, 20, gdyż są one na poziomie trudniejszym niż pozostałe.
9. Na rozwiązanie testu masz 60 minut.
Powodzenia!
Po rozwiązaniu testu, sprawdź swoje wyniki razem z kolegą lub nauczycielem, a następnie
sprawdź w tabeli, poniżej, jaki stopień mógłbyś sobie wystawić. Ogółem możesz uzyskać 20
punktów.
Ocena
dopuszczający
dostateczny
dobry
bardzo dobry
Ilość punktów
11-12
13-16
17-18
19-20
ZESTAW ZADAŃ TESTOWYCH
1. Stan pracy transformatora w którym uzwojenie pierwotne zasilane jest napieciem
znamionowym, a w obwodzie wtórnym włączony jest odbiornik nazywamy stanem
pracy:
a) jałowym,
b) obciążenia,
c) zwarcia,
d) znamionowym.
2. Moc znamionową transformatora określa się mocą:
a) czynną,
b) bierną,
c) pozorną,
d) chwilową.
3. Moc znamionową transformatora wyrażamy w:
a) W,
b) V A,
c) war,
d) kWh.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
4. Wytworzenie napięcia umożliwiającego przepływ odpowiedniego prądu w maszynie
prądu stałego należy do zadań:
a) stojana,
b) wirnika,
c) uzwojenia komutacyjnego,
d) magneśnicy.
5. W maszynie prądu stałego uzwojenie twornika oznaczmy symbolem literowym:
a) B1 B2,
b) A1 A2,
c) D1 D2,
d) C1 C2.
6. Zmiana kierunku prędkości obrotowej w maszynie prądu stałego jest:
a) niemożliwa,
b) możliwa poprzez zmianę kierunku przyłączenia napięcia w obwodzie wzbudzenia
i w obwodzie twornika,
c) możliwa poprzez zmianę kierunku przyłączenia napięcia w obwodzie wzbudzenia lub
w obwodzie twornika,
d) możliwa poprzez zmianę polaryzacji napięcia w obwodzie komutacji.
7. Uzwojeniem głównym silnika indukcyjnego jednofazowego jest uzwojenie jednofazowe
znajdujące się:
a) w stojanie,
b) w wirniku,
c) na zewnątrz w urządzeniu rozruchowym,
d) w magneśnicy.
8. Przy prędkości obrotowej n=0 silnik indukcyjny jednofazowy wytwarza moment
rozruchowy:
a) maksymalny,
b) minimalny,
c) nominalny,
d) równy zero.
9. Określenie strat jałowych i wyznaczenie przybliżonej wartości strat mechanicznych
silnika indukcyjnego jednofazowego umożliwia znajomość charakterystyki:
a) wyjściowej,
b) obciążeniowej,
c) biegu jałowego,
d) wejściowej.
10. Czy silnik krokowy z magnesem trwałym oznaczmy:
a) PM,
b) VR,
c) HB,
d) żadna z powyższych odpowiedzi.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
11. Typową rozdzielczością silników krokowych z magnesem trwałym jest:
a) 7,5
o
-30
o
,
b) 7,5
o
-15
o
,
c) 100
o
-300
o
,
d) 1
o
-3
o
.
12. W silnikach krokowych kąt obrotu jest:
a) odwrotnie proporcjonalny do ilości obrotów,
b) proporcjonalny do ilości obrotów,
c) proporcjonalny do ilości obrotów i mocy silnika,
d) proporcjonalny do mocy silnika.
13. Sterownik prądu zmiennego to:
a) układ który służy do zmiany parametrów odbiornika,
b) układ który służy do sterowania pracą odbiorników prądu stałego,
c) układ który służy do sterowania oświetleniem,
d) układ który zmienia wartość skuteczną napięcia, prądu lub moc czynną.
14. W sterowniku prądu stałego musi znajdować się:
a) filtr przeciwzakłóceniowy,
b) układ wyłączania tyrystora,
c) układ przeciwzwarciowy,
d) układ stabilizujący napięcie.
15. W układach START – STOP funkcję STOP realizuje się:
a) łącząc równolegle styki czynne przycisków w układzie zasilania przekaźnika,
b) łącząc szeregowo styki czynne przycisków w układzie zasilania przekaźnika,
c) łącząc szeregowo styki bierne przycisków w układzie zasilania przekaźnika,
d) łącząc równolegle styki bierne przycisków w układzie zasilania przekaźnika.
16. Nadajnik radiowy składa się z:
a) generatora w.cz., modulatora, anteny,
b) generatora w.cz., modulatora, wzmacniacza w.cz., anteny,
c) generatora w.cz., modulatora, wzmacniacza w.cz., układu sprzęgającego, anteny,
d) generatora w.cz., wzmacniacza w.cz., układu sprzęgającego, anteny.
17. Modulacja sygnału to:
a) inaczej wzmocnienie jego wartości,
b) inaczej odfiltrowanie zakłóceń zawartych w nim,
c) inaczej stłumienie jego amplitudy,
d) inaczej nałożenie sygnału akustycznego na sygnał fali nośnej.
18. Odbiornik telewizyjny składa się z:
a) głowicy w.cz., toru p.cz., układu syntezy obrazu i dźwięku, głośnika, kineskopu,
b) głowicy w.cz., toru p.cz., modulatora, układu syntezy obrazu i dźwięku,
c) głowicy w.cz., toru p.cz., układu sprzęgającego, układu syntezy obrazu i dźwięku,
d) głowicy w.cz., toru p.cz., układu sprzęgającego, układu syntezy obrazu i dźwięku,
głośnika, kineskopu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
19. Sygnał fonii w odbiorniku telewizyjnym zmodulowany jest FM, a sygnał nośny ma
częstoliwość:
a) 2MHz,
b) 6,5MHz,
c) 8MHz,
d) 20MHz.
20. W układach START – STOP funkcję START realizuje się:
a) łącząc równolegle styki czynne przycisków w układzie zasilania przekaźnika,
b) łącząc szeregowo styki czynne przycisków w układzie zasilania przekaźnika,
c) łącząc szeregowo styki bierne przycisków w układzie zasilania przekaźnika,
d) łącząc równolegle styki bierne przycisków w układzie zasilania przekaźnika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
KARTA ODPOWIEDZI
Imię i nazwisko........................................................
Analiza działania podstawowych maszyn i urządzeń elektrycznych
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
6. LITERATURA
1. Bastian P., Schuberth G., Spielvogel O., Steil H.J., Tkotz K., Ziegler K.: Praktyczna
elektrotechnika ogólna. REA, Warszawa 2003
2. Chochowski A.: Podstawy elektrotechniki i elektroniki dla elektryków. Cz. 2. WSiP,
Warszawa 2003
3. Chwaleba A., Moeschke B., Płoszajski G.: Elektronika. WSiP, Warszawa 1996
4. Laskowski J.: Poradnik elektroenergetyka przemysłowego. COSIWSEP, Warszawa 2003
5. Pióro B., Pióro M.: Podstawy elektroniki. Cz 2. WSiP, Warszawa 1997
6. http://www.imne.pwr.wroc.pl/SkryptME/CW35.htm
7. http://www.silniki.pl
8. http://www.wqbit.cam.pl
Wyszukiwarka
Podobne podstrony:
Analizowanie działania oraz stosowanie podstawowych maszyn i urządzeń elektrycznych
Podstawowe maszyny i urządzenia stosowane w elektroenergetyce polskiej
05 Wytwarzanie prostych części maszyn i urządzeń
04 Analizowanie działania oraz stosowanie podstawowych maszyn
Analizowanie działania maszyn i urządzeń elektrycznych
operator maszyn i urzadzen odlewniczych 812[03] z2 05 n
operator maszyn i urzadzen metalurgicznych 812[02] o1 05 n
mechanik maszyn i urzadzen drogowych 833[01] z2 05 u
operator maszyn i urzadzen do obrobki plastycznej 812[01] o1 05 u
05 Uzytkowanie maszyn i urzadze Nieznany (3)
Analizowanie dzialania maszyn i Nieznany
mechanik maszyn i urzadzen drogowych 833[01] o1 05 u
operator maszyn i urzadzen odlewniczych 812[03] o1 05 n
Podstawy konstruowania urządzeń precyzyjnych 05
Analizowanie działania urządzeń i systemów (23 55)
więcej podobnych podstron