METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
1
ROZWI
Ą
ZANIE RAMY METOD
Ą
PRZEMIESZCZE
Ń
1.
DANE WYJŚCIOWE
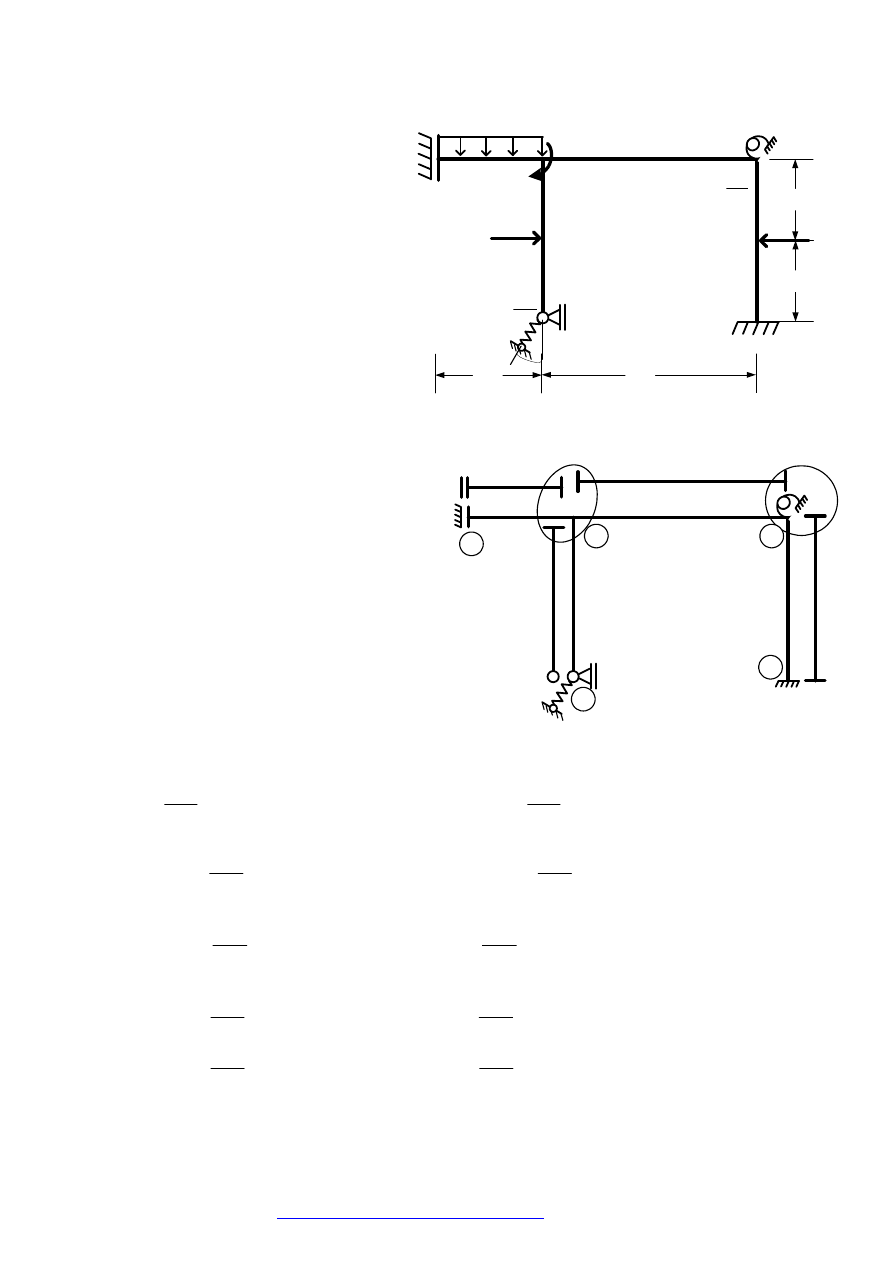
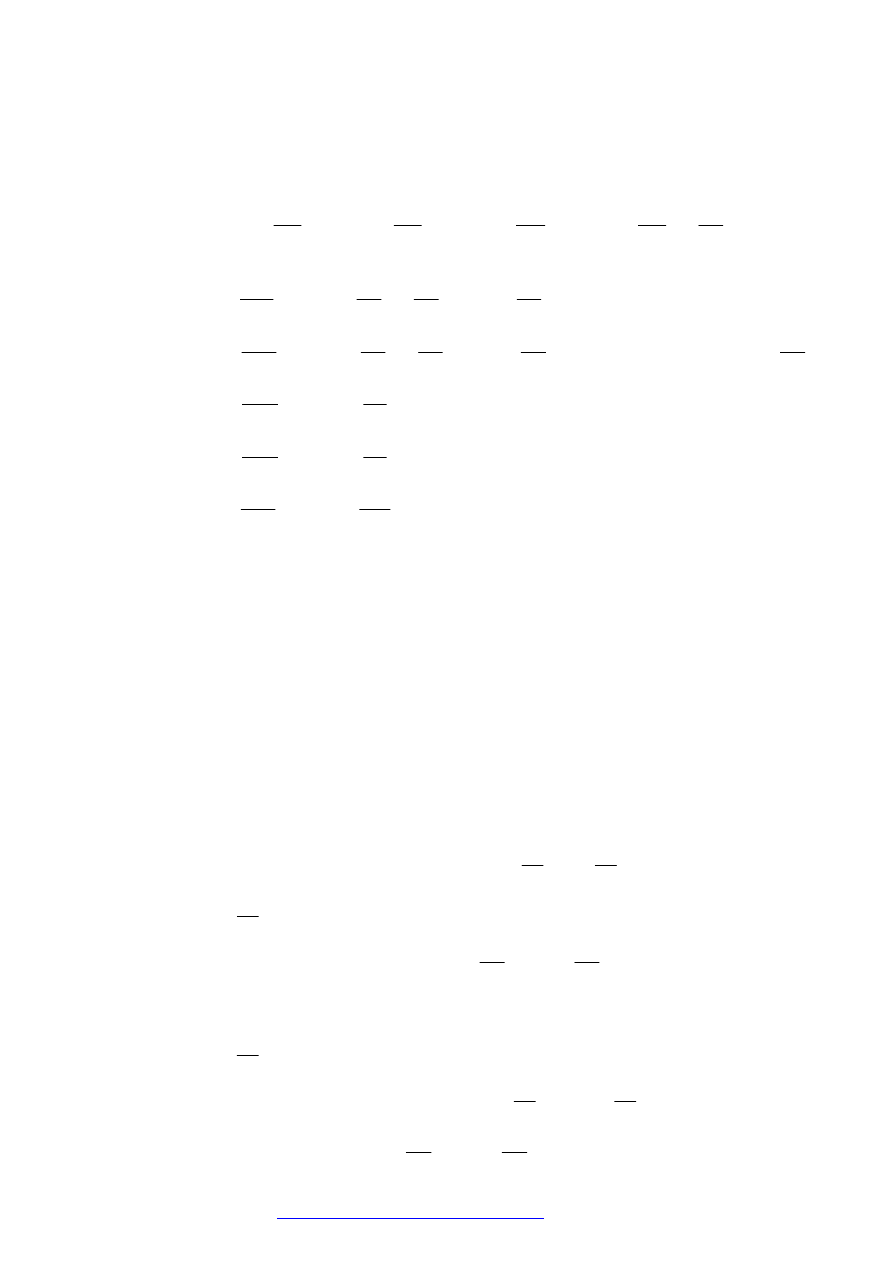
Ramę pokazaną na rysunku rozwiązać
metodą przemieszczeń.
Dokonać kontroli rozwiązania.
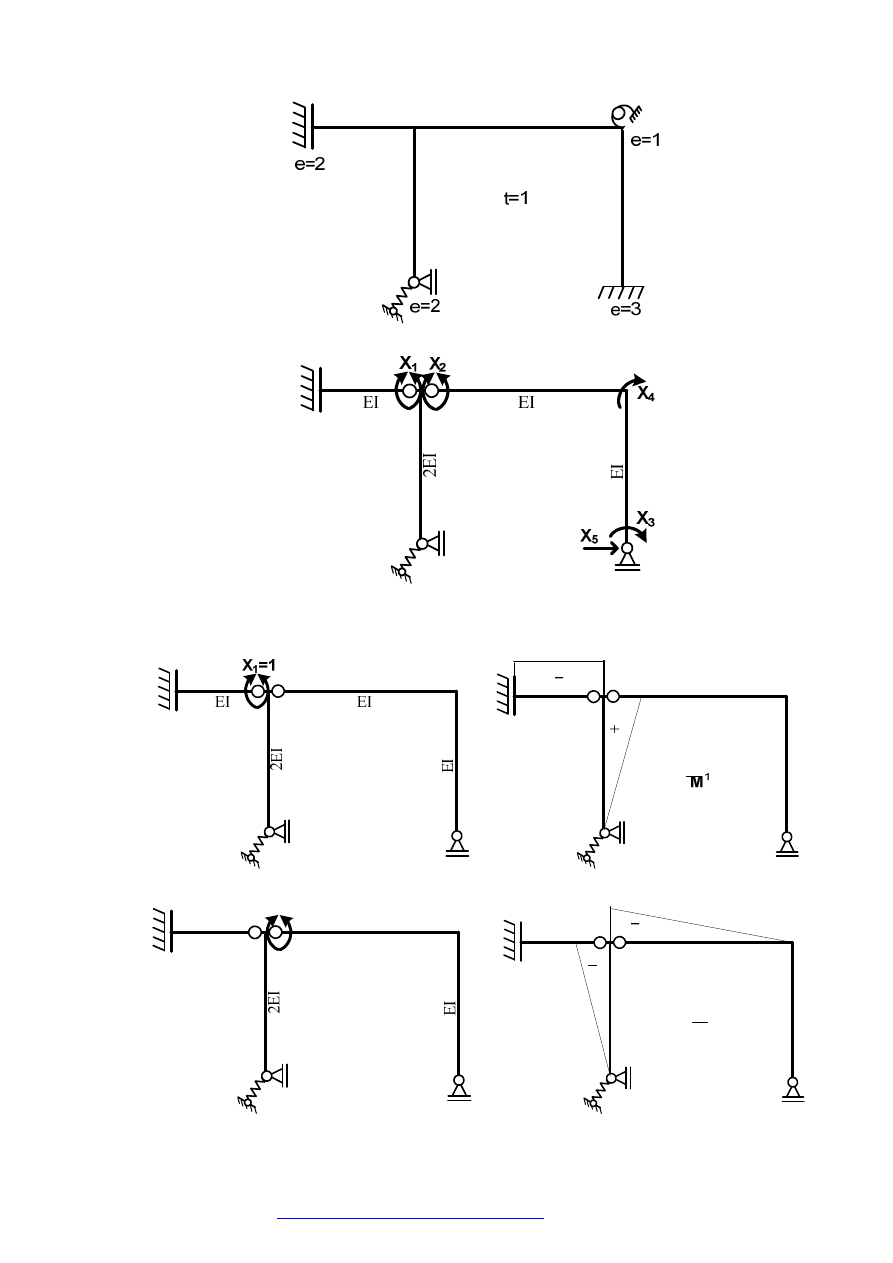
2.
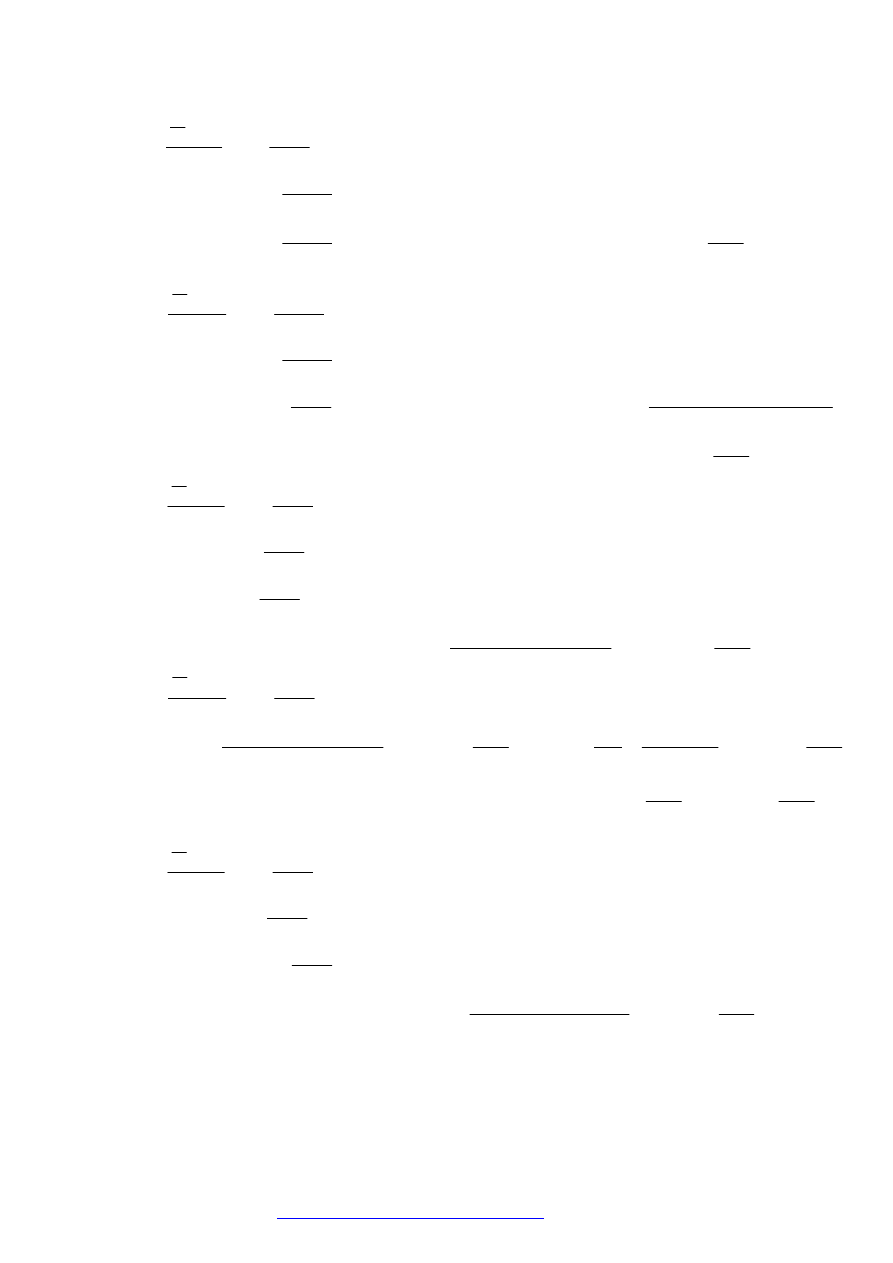
WYZNACZENIE STOPNIA GEOMETRYCZNEJ NIEWYZNACZALNOŚCI
2.1
WYZNACZENIE LICZBY STOPNI SWOBODY OBROTU WĘZŁÓW
W celu wyznaczenia
ϕ
n
dokonujemy
podziału układu na elementy, dla których
dane są wzory transformacyjne, co
pokazano na rysunku obok.
Z przyjętego podziału na elementy
wynika, że stosować będziemy wzory
transformacyjne w postaci:
dla pręta 1-2 (sztywno-sztywny)
(
)
o
M
L
EI
M
12
12
21
12
12
12
12
6
2
4
+
⋅
−
⋅
+
⋅
=
ψ
ϕ
ϕ
,
(
)
o
M
L
EI
M
21
12
12
21
12
12
21
6
2
4
+
⋅
−
⋅
+
⋅
=
ψ
ϕ
ϕ
,
dla pręta 2-3 (sztywno-sztywny)
(
)
o
M
L
EI
M
23
23
32
23
23
23
23
6
2
4
+
⋅
−
⋅
+
⋅
=
ψ
ϕ
ϕ
,
(
)
o
M
L
EI
M
32
23
23
32
23
23
32
6
2
4
+
⋅
−
⋅
+
⋅
=
ψ
ϕ
ϕ
,
dla pręta 1-4 (sztywno-przegubowy)
(
)
(
)
o
o
M
L
EI
M
L
EI
M
14
14
14
14
14
14
14
14
14
14
14
3
3
0
3
+
−
⋅
⋅
=
+
⋅
−
+
⋅
⋅
=
ψ
ϕ
ψ
ϕ
,
0
41
=
M
,
dla pręta 1-5 (sztywno-łyżwa)
(
)
(
)
o
o
M
L
EI
M
L
EI
M
15
51
15
15
15
15
15
51
15
15
15
15
0
1
1
+
−
⋅
=
+
⋅
−
⋅
−
⋅
⋅
=
ϕ
ϕ
ψ
ϕ
ϕ
,
(
)
(
)
o
o
M
L
EI
M
L
EI
M
51
15
51
15
15
51
15
15
51
15
15
51
0
1
1
+
−
⋅
=
+
⋅
−
⋅
−
⋅
⋅
=
ϕ
ϕ
ψ
ϕ
ϕ
.
Uwzględniając warunki podparcia i połączenia elementów (
,
0
32
51
=
=
ϕ
ϕ
,
1
15
14
12
ϕ
ϕ
ϕ
ϕ
=
=
=
2
23
21
ϕ
ϕ
ϕ
=
=
) widzimy, że wszystkie kąty obrotu końców przyjętych elementów określone są przez
kąty obrotu
dwóch węzłów
2
1
ϕ
ϕ
i
.
Liczba stopni swobody obrotu węzłów wynosi więc n
ϕ
=
2
.
1
EI
E
I
EI
ϕϕϕϕ
1111
5
3
2
ϕϕϕϕ
3333
= 0
=
0
2
E
I
4
ϕϕϕϕ
2222
ϕϕϕϕ
5555
q = 0. 25 F/m
EI
E
I
1. 5 m
1. 5 m
EI
F
M = 2 Fm
4 m
2 m
αααα
sin
α
= 0.6
cos
α
= 0.8
m
EI
k
2
=
ϕ
3
2
m
EI
k
=
δ
2
E
I
F
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
2
2.2
WYZNACZENIE LICZBY STOPNI SWOBODY PRZESUWU WĘZŁÓW
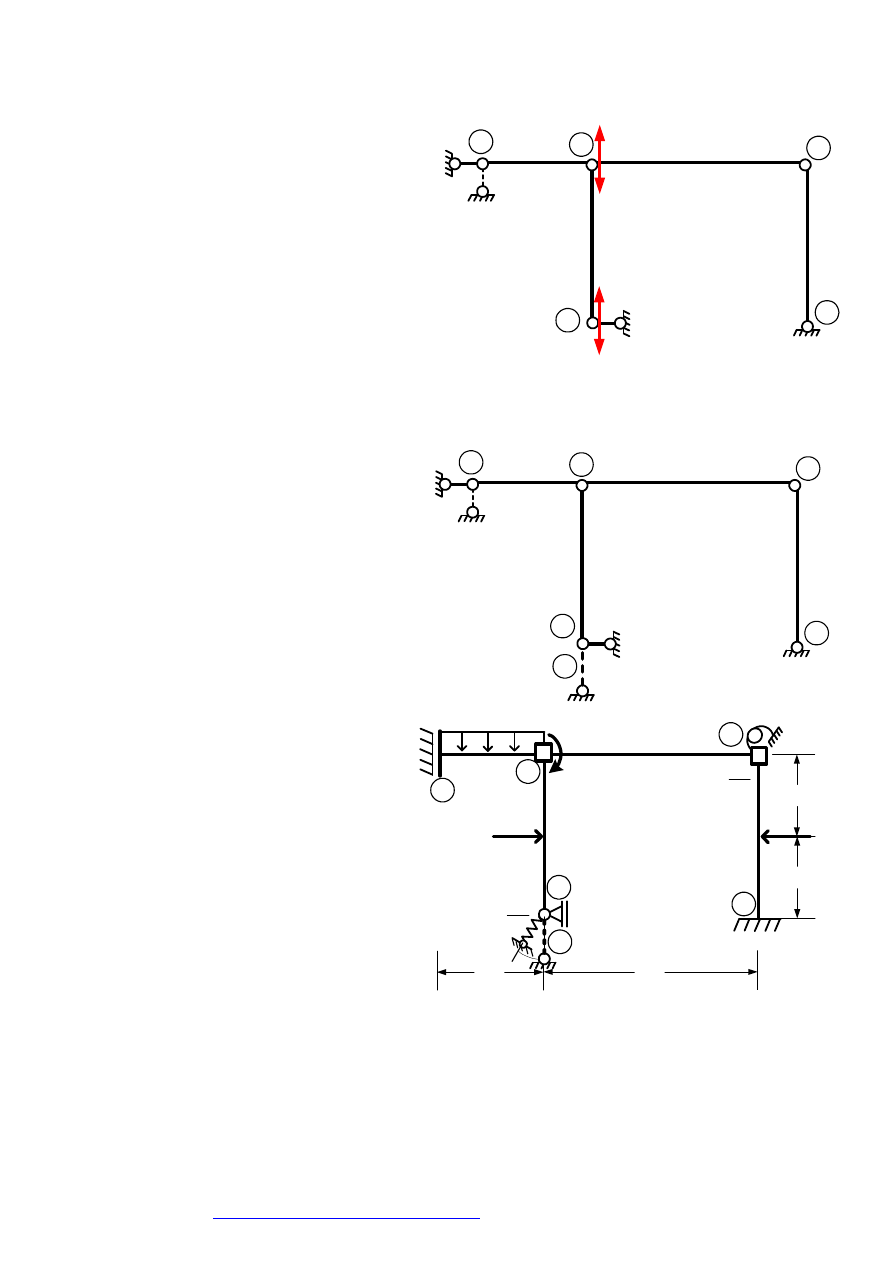
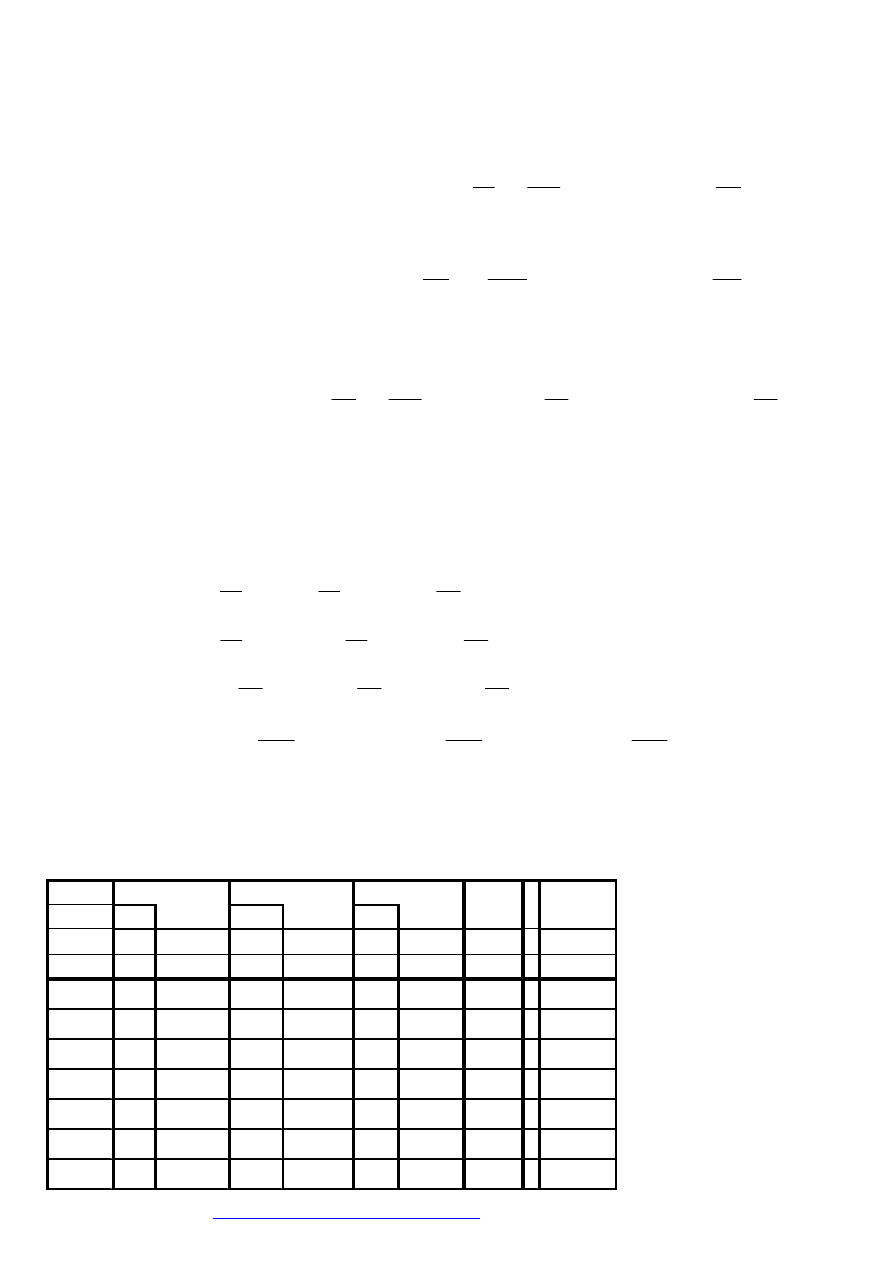
W celu wyznaczenia
n
δ
tworzymy
przegubowy model układu (rysunek obok) w ten
sposób, że usuwamy więzi sprężyste, wszystkie
węzły zamieniamy na przegubowe i eliminujemy
przesuwy dla elementów, w których wzorach
transformacyjnych nie występują kąty obrotu cięciw
(
ij
ψ
). Na końcu łyżwowym elementu „sztywno-
łyżwa” i na końcu wolnym elementu
wspornikowego dodajemy więzi prostopadłe do osi
tych prętów. W rozwiązywanym zadaniu dodano
więź zaznaczoną linią przerywaną w węźle 5.
Liczba stopni swobody przesuwu układu
przegubowego spełnia warunek
r
p
w
n
−
−
⋅
≥
2
δ
=2*8 -7 - 8 = 1,
gdzie w - liczba węzłów, p - liczba prętów, r - liczba więzi podporowych.
Wynika stąd, że aby układ był
geometrycznie niezmienny należy dodać, co
najmniej 1 więź. Należy dokonać analizy
możliwych przesuwów węzłów modelu
przegubowego. Na rysunku powyżej zaznaczono
czerwonymi strzałkami te możliwe przesuwy.
Dodanie 1 więzi (nr I) przekształciło przyjęty model
w układ geometrycznie niezmienny co pokazano na
rysunku obok.
Oznacza to, że liczba stopni swobody
przesuwu wynosi
1
=
δ
n
.
Stopień geometrycznej niewyznaczalności wynosi
więc
=
+
=
δ
ϕ
n
n
n
g
2 + 1.
3.
UKŁAD PODSTAWOWY
Układ podstawowy tworzymy z układu danego
przez dodanie n
ϕ
więzi rotacyjnych i
n
δ
więzi
translacyjnych (w naszym przykładzie 2 więzi
rotacyjnych i 1 translacyjnej), co przekształca
dany układ w układ geometrycznie wyznaczalny
pokazany na rysunku obok.
4.
ROZWIĄZANIA UKŁADU PODSTAWOWEGO
4.1
ROZWIĄZANIA UKŁADU PODSTAWOWEGO OD OBCIĄŻENIA DANEGO (F)
przy założeniu (
0
2
1
=
=
=
I
δ
ϕ
ϕ
)
Należy pamiętać, że poszczególne stany obciążeń rozpatrujemy rozłącznie. Stan obciążeń danych
rozpatrujemy, więc, przy założeniu
0
2
1
=
=
=
I
δ
ϕ
ϕ
, co oznacza, że do wzorów transformacyjnych
podstawiamy w tym stanie wszystkie
0
=
=
ij
ij
ψ
ϕ
.
1
5
4
3
2
I
1
5
4
3
2
q = 0. 25 F/m
EI
E
I
1. 5 m
1. 5 m
EI
F
M = 2 Fm
4 m
2 m
αααα
sin
α
= 0.6
cos
α
= 0.8
m
EI
k
2
2
=
ϕ
3
2
m
EI
k
=
δ
2
E
I
2
1
5
4
I
3
F
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
3
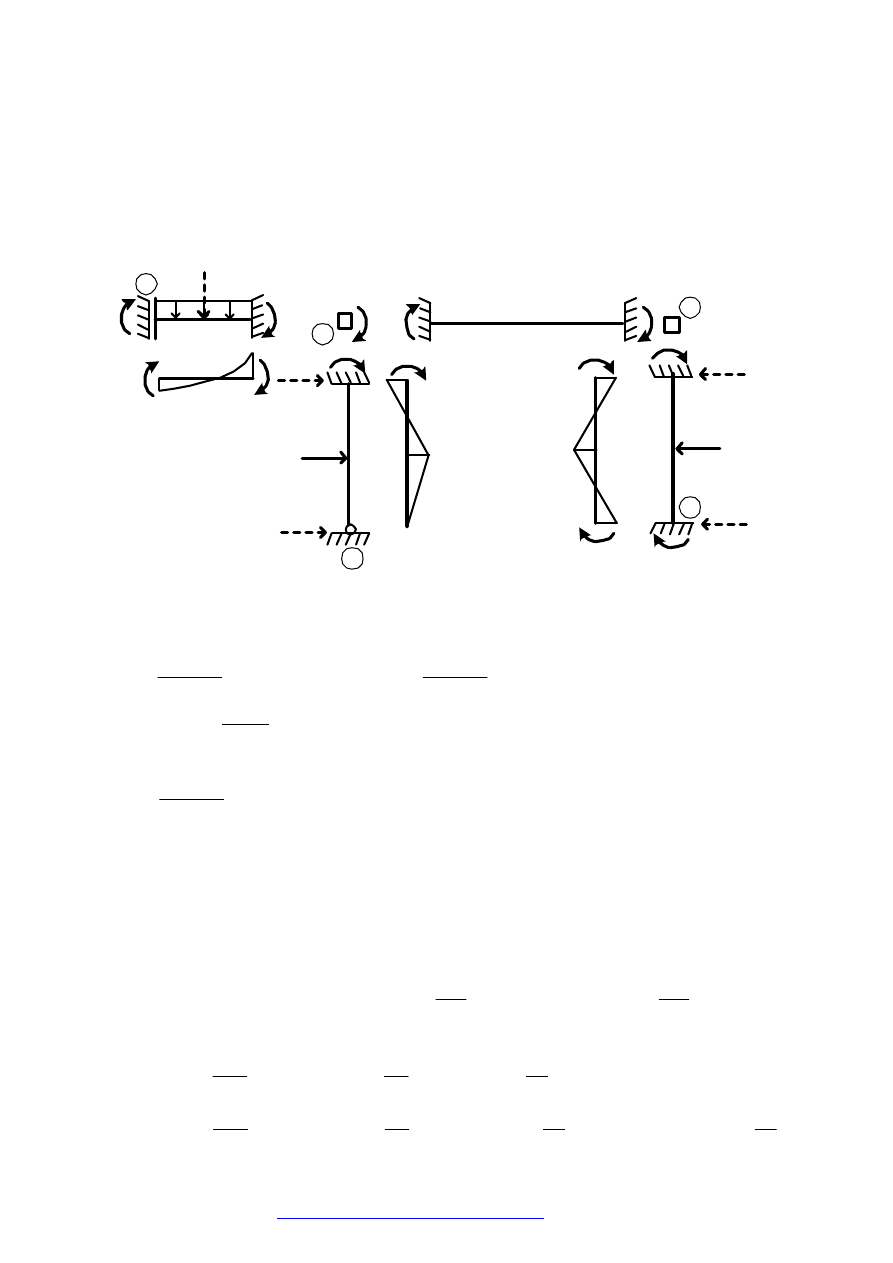
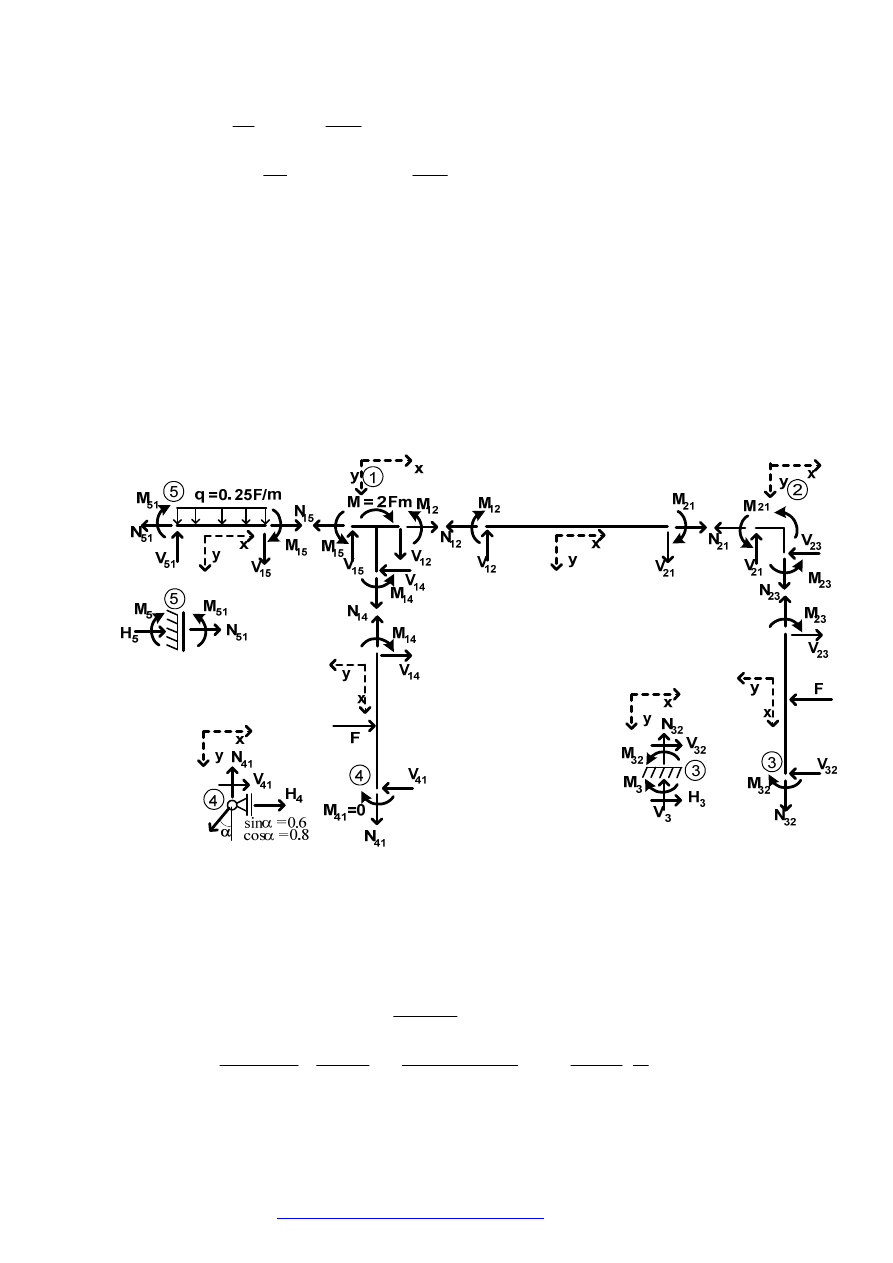
Dla elementów przyjętych w punkcie 1 momenty brzegowe odczytujemy z tablic lub otrzymujemy w
wyniku rozwiązania metodą sił. Obciążenia działające na poszczególne elementy i wykresy momentów
zginających pokazano na rysunku poniżej. Pokazano także siły równoważne działającym obciążeniom
sprowadzone do punktów, których przemieszczenia będą wyznaczane od jednostkowego
przemieszczenia
I
δ
. Punktami takimi są końce prętów z wyjątkiem prętów typu „s-ł” i
„wspornik”. Przesunięcia wszystkich punktów tych dwóch typów prętów są równe przesunięciu ich
końca sztywnego i ich obciążenie wystarczy zastąpić wypadkową. W rozwiązywanym przykładzie
dotyczy to pręta 1-5 typu „s-ł”.
q = 0.25 F/m
5
M = 2 Fm
F
4
M
51
M
15
2
F
3
1
M
14
M
41
=0
M
23
M
32
M
12
=0
M
21
=0
P
1
P
2
P
3
P
5
P
4
Obciążenia węzłów: węzła nr 1
Fm
M
M
o
2
1
=
=
.
węzeł nr 2
0
2
=
o
M
.
Momenty brzegowe dla prętów (obliczamy z odpowiednich wzorów):
=
⋅
=
6
)
2
(
2
51
m
q
M
o
0.1667 F m,
=
⋅
=
3
)
2
(
2
15
m
q
M
o
0.3333 F m,
=
+
o
o
M
M
15
51
0.5 Fm,
=
⋅
=
−
=
8
3
23
32
m
F
M
M
o
o
0.375 Fm,
0
32
23
=
+
o
o
M
M
,
0
21
12
=
=
o
o
M
M
,
M
M
o
o
12
21
0
+
=
,
=
⋅
⋅
=
16
3
3
14
m
F
M
o
0.5625Fm,
0
41
=
o
M
,
=
+
o
o
M
M
14
14
0.5625 Fm.
Siły równoważne mają wartości
F
m
m
F
P
5
.
0
2
/
25
.
0
1
=
⋅
=
,
F
F
P
P
P
P
5
.
0
2
/
5
4
3
2
=
=
=
=
=
.
4.2
ROZWIĄZANIE UKŁADU PODSTAWOWEGO OD
ϕ
1
1
=
przy założeniu (
0
2
=
=
I
δ
ϕ
,
0
=
F
)
W tym stanie obciążenia do wzorów transformacyjnych podstawiamy:
,
1
1
1
15
1
14
1
12
1
1
=
=
=
=
=
ϕ
ϕ
ϕ
ϕ
ϕ
j
pozostałe
,
0
1
=
ij
ϕ
,
0
=
ij
ψ
0
=
o
ij
M
,
co oznacza, że korzystamy ze wzorów:
(
)
1
1
1
ji
ij
ij
ij
ij
ij
ij
b
a
L
EI
M
ϕ
ϕ
⋅
+
⋅
=
,
(
)
1
1
1
ij
ji
ji
ji
ij
ij
ji
b
a
L
EI
M
ϕ
ϕ
⋅
+
⋅
=
Momenty brzegowe wynoszą:
(
)
(
)
m
EI
m
EI
L
EI
M
⋅
=
⋅
+
⋅
=
⋅
+
⋅
=
1
0
2
1
4
4
2
4
21
12
12
12
1
12
ϕ
ϕ
,
(
)
(
)
m
EI
m
EI
L
EI
M
⋅
=
⋅
+
⋅
=
⋅
+
⋅
=
5
.
0
1
2
0
4
4
2
4
12
21
21
21
1
21
ϕ
ϕ
,
m
EI
M
M
⋅
=
+
5
.
1
2
21
2
12
,
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
4
( )
( )
m
EI
m
EI
L
EI
M
⋅
=
⋅
⋅
=
⋅
⋅
=
2
1
3
2
3
3
14
14
14
1
14
ϕ
,
0
1
41
=
M
,
m
EI
M
M
⋅
=
+
2
1
41
1
14
,
(
)
(
)
m
EI
m
EI
L
EI
M
⋅
=
−
⋅
=
−
⋅
=
5
.
0
0
1
2
51
15
15
15
1
15
ϕ
ϕ
,
(
)
(
)
m
EI
m
EI
L
EI
M
⋅
−
=
−
⋅
=
−
⋅
=
5
.
0
1
0
2
15
51
15
15
1
51
ϕ
ϕ
,
0
1
51
1
15
=
+
M
M
,
(
)
(
)
0
0
2
0
4
3
2
4
32
23
23
23
1
23
=
⋅
+
⋅
=
⋅
+
⋅
=
m
EI
L
EI
M
ϕ
ϕ
,
(
)
(
)
0
0
2
0
4
3
2
4
23
32
23
23
1
32
=
⋅
+
⋅
=
⋅
+
⋅
=
m
EI
L
EI
M
ϕ
ϕ
,
0
1
23
1
32
=
+
M
M
.
4.3
ROZWIĄZANIE UKŁADU PODSTAWOWEGO OD OBCIĄŻENIA
1
2
=
ϕ
przy założeniu (
0
1
=
=
I
δ
ϕ
,
0
=
F
)
W tym stanie obciążenia do wzorów transformacyjnych podstawiamy:
,
1
2
2
2
23
2
21
=
=
=
ϕ
ϕ
ϕ
pozostałe
,
0
2
=
ij
ϕ
,
0
=
ij
ψ
0
=
o
ij
M
,
co oznacza, że korzystamy ze wzorów:
(
)
2
2
2
ji
ij
ij
ij
ij
ij
ij
b
a
L
EI
M
ϕ
ϕ
⋅
+
⋅
=
,
(
)
2
2
2
ij
ji
ji
ji
ij
ij
ji
b
a
L
EI
M
ϕ
ϕ
⋅
+
⋅
=
Momenty brzegowe wynoszą:
(
)
(
)
m
EI
m
EI
L
EI
M
⋅
=
⋅
+
⋅
=
⋅
+
⋅
=
5
.
0
1
2
0
4
4
2
4
21
12
12
12
2
12
ϕ
ϕ
,
(
)
(
)
m
EI
m
EI
L
EI
M
⋅
=
⋅
+
⋅
=
⋅
+
⋅
=
1
0
2
1
4
4
2
4
12
21
21
21
2
21
ϕ
ϕ
,
m
EI
M
M
⋅
=
+
5
.
1
2
21
2
12
,
(
)
(
)
m
EI
m
EI
L
EI
M
⋅
=
⋅
+
⋅
=
⋅
+
⋅
=
3333
.
1
0
2
1
4
3
2
4
32
23
23
23
2
23
ϕ
ϕ
,
(
)
(
)
m
EI
m
EI
L
EI
M
6667
.
0
1
2
0
4
3
2
4
23
32
23
23
2
32
=
⋅
+
⋅
=
⋅
+
⋅
=
ϕ
ϕ
,
m
EI
M
M
⋅
=
+
2
2
32
2
23
,
( )
( )
0
0
3
2
3
3
14
14
14
2
14
=
⋅
⋅
=
⋅
⋅
=
m
EI
L
EI
M
ϕ
,
0
1
41
=
M
,
0
2
41
2
14
=
+
M
M
,
(
)
(
)
0
0
0
2
51
15
15
15
2
15
=
−
⋅
=
−
⋅
=
m
EI
L
EI
M
ϕ
ϕ
,
(
)
(
)
0
0
0
2
15
51
15
15
2
51
=
−
⋅
=
−
⋅
=
m
EI
L
EI
M
ϕ
ϕ
,
0
2
51
2
15
=
+
M
M
.
4.4
ROZWIĄZANIA UKŁADU PODSTAWOWEGO OD
OBCIĄŻENIA
δ
I
=
1
przy założeniu (
0
2
1
=
=
=
F
ϕ
ϕ
)
W tym stanie obciążenia do wzorów
transformacyjnych podstawiamy:
,
0
=
ij
ϕ
0
=
o
ij
M
oraz kąty obrotu cięciw prętów
( )
ψ
ij
I
określone od przemieszczenia
δ
I
=
1,
co oznacza, że korzystamy ze wzorów o postaci
I
ij
ij
ij
ij
I
ij
L
EI
c
M
ψ
⋅
⋅
−
=
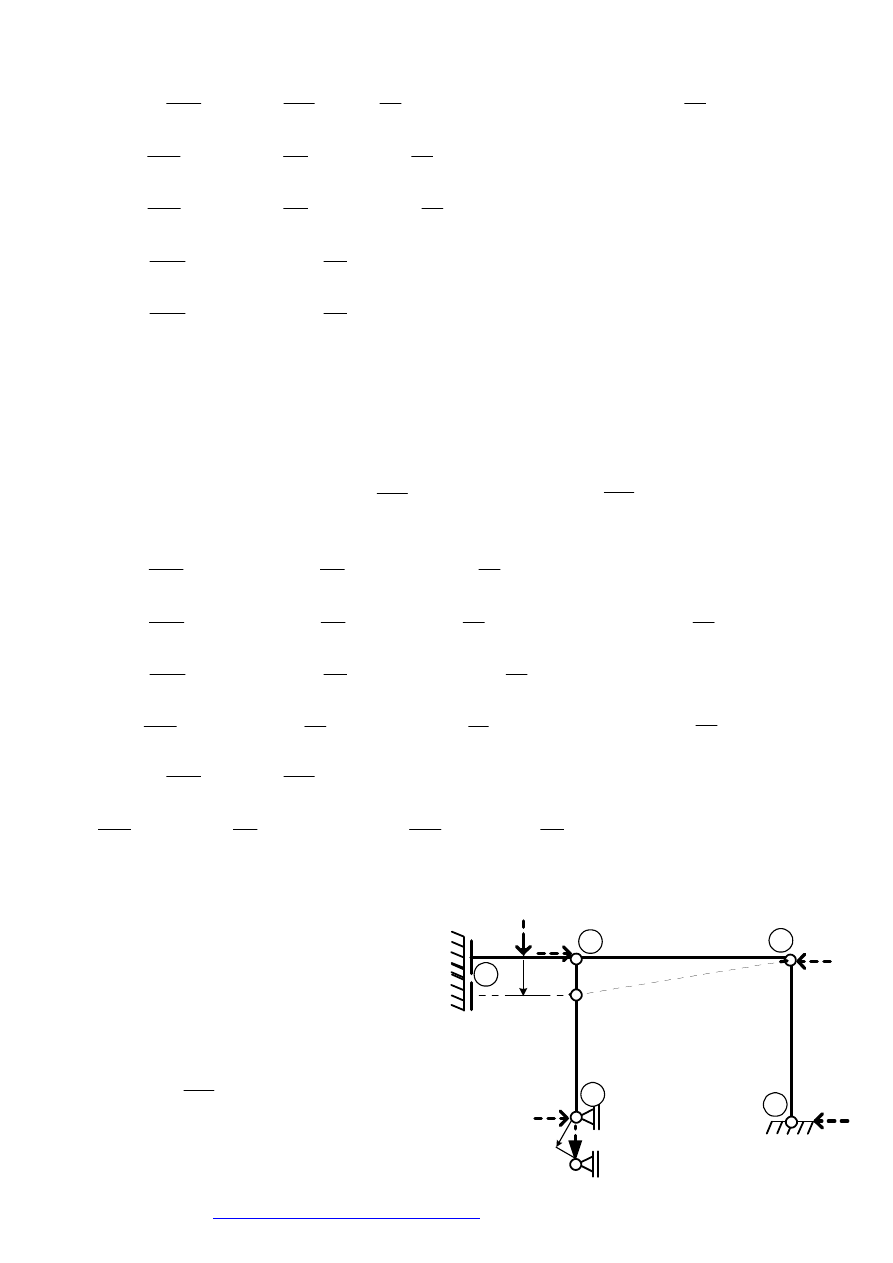
W celu wyznaczenia szukanych kątów obrotu cięciw
prętów oraz przemieszczeń w miejscach przyłożenia
sił równoważnych rozpatrujemy przegubowy model
1
5
4
3
2
P
2
P
3
P
4
P
5
1
1
=
I
δ
0
5
4
3
2
=
=
=
=
I
I
I
I
δ
δ
δ
δ
I
1
δδδδ
=
αααα
P
1
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
5
układu podstawowego (rysunek obok) bez przegubu na końcu łyżwowym elementu sztywno-łyżwa i
wymuszamy przesunięcie
1
=
I
δ
w miejscu i kierunku dodanej więzi I. Jak widać na rysunku wartości
wzajemnych przesunięć końców prętów wynoszą:
0
15
=
∆
I
,
0
14
=
∆
I
,
0
23
=
∆
I
,
1
12
−
=
∆
I
(znak „
−
” oznacza, że obrót nastąpił w lewo).
Wartości kątów obrotów cięciw wynoszą:
0
15
15
15
=
∆
=
L
I
I
ψ
,
0
14
14
14
=
∆
=
L
I
I
ψ
,
0
23
23
23
=
∆
=
L
I
I
ψ
,
m
L
I
I
4
1
12
12
12
−
=
∆
=
ψ
.
Momenty brzegowe wynoszą:
I
I
M
m
EI
m
m
EI
L
EI
M
21
2
12
12
12
12
375
.
0
4
1
4
6
6
=
⋅
=
−
⋅
⋅
−
=
⋅
⋅
−
=
ψ
,
2
12
12
12
21
375
.
0
4
1
4
6
6
m
EI
m
m
EI
L
EI
M
I
⋅
=
−
⋅
⋅
−
=
⋅
⋅
−
=
ψ
,
2
21
12
75
.
0
m
EI
M
M
I
I
⋅
=
+
,
0
0
3
6
6
23
23
23
23
=
⋅
⋅
−
=
⋅
⋅
−
=
m
EI
L
EI
M
I
ψ
,
0
0
3
6
6
23
23
23
32
=
⋅
⋅
−
=
⋅
⋅
−
=
m
EI
L
EI
M
I
ψ
,
0
32
23
=
+
I
I
M
M
,
0
0
3
2
3
3
14
14
14
14
=
⋅
⋅
−
=
⋅
⋅
−
=
m
EI
L
EI
M
I
ψ
,
0
41
=
I
M
,
0
41
14
=
+
I
I
M
M
0
51
15
=
=
I
I
M
M
,
0
51
15
=
+
I
I
M
M
.
Wartości przemieszczeń w miejscach przyłożenia sił równoważnych wynoszą:
1
1
=
I
δ
,
0
5
4
3
2
=
=
=
=
I
I
I
I
δ
δ
δ
δ
.
Zmiana długości translacyjnej więzi sprężystej (tu skrócenie) równa jest rzutowi przesunięcia węzła 4
na kierunek tej więzi:
8
.
0
8
.
0
1
cos
1
−
=
⋅
−
=
⋅
−
=
∆
α
I
k
L
.
5.
UKŁAD RÓWNAŃ KANONICZNYCH
5.1
POSTAĆ OGÓLNA UKŁADU RÓWNAŃ
.
0
,
0
,
0
2
2
1
1
2
2
2
22
1
21
1
1
2
12
1
11
=
+
⋅
+
⋅
+
⋅
=
+
⋅
+
⋅
+
⋅
=
+
⋅
+
⋅
+
⋅
Io
I
II
I
I
o
I
I
o
I
I
k
k
k
k
k
k
k
k
k
k
k
k
δ
ϕ
ϕ
δ
ϕ
ϕ
δ
ϕ
ϕ
5.2
OBLICZENIE WSPÓŁCZYNNIKÓW UKŁADU RÓWNAŃ
=
+
+
+
=
+
=
∑
0
1
15
1
14
1
12
1
1
1
11
M
M
M
k
M
k
j
j
ϕ
m
EI
m
EI
⋅
=
⋅
+
+
5
.
3
)
5
.
0
2
1
(
,
k
M
12
12
2
=
=
m
EI
⋅
5
.
0
,
=
+
+
=
=
∑
I
I
I
j
I
j
I
M
M
M
M
k
15
14
12
1
1
2
2
375
.
0
)
0
0
375
.
0
(
m
EI
m
EI
⋅
=
⋅
+
+
,
=
−
+
+
=
−
=
∑
o
o
o
o
o
j
o
j
o
M
M
M
M
M
M
k
1
15
14
12
1
1
1
Fm
Fm
⋅
−
=
⋅
−
+
+
1042
.
1
)
2
3333
.
0
5625
.
0
0
(
,
k
M
21
21
1
=
=
=
⋅
m
EI
5
.
0
12
k
,
=
+
+
=
+
=
∑
ϕ
ϕ
2
2
23
2
21
2
2
2
22
k
M
M
k
M
k
j
j
m
EI
m
EI
⋅
=
⋅
+
+
3333
.
4
)
2
3333
.
1
1
(
,
=
+
=
=
∑
I
I
j
I
j
I
M
M
M
k
23
21
2
2
(
)
2
2
375
.
0
0
375
.
0
m
EI
m
EI
⋅
=
⋅
+
,
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
6
=
+
+
=
−
=
∑
0
23
21
2
2
2
o
o
o
j
o
j
o
M
M
M
M
k
(
)
Fm
Fm
⋅
−
=
⋅
−
375
.
0
375
.
0
0
,
(
)
=
⋅
+
−
=
∑
I
ij
ij
ji
ij
I
M
M
k
ψ
1
1
1
(
)
(
)
(
)
(
)
=
⋅
+
−
⋅
+
−
⋅
+
−
⋅
+
−
I
I
I
I
M
M
M
M
M
M
M
M
23
1
32
1
23
15
1
51
1
15
14
1
41
1
14
12
1
21
1
12
ψ
ψ
ψ
ψ
2
375
.
0
0
0
0
25
.
0
5
.
1
m
EI
m
m
EI
⋅
=
+
+
+
−
⋅
⋅
−
=
= k
I
1
,
(
)
=
⋅
+
−
=
∑
I
ij
ij
ji
ij
I
M
M
k
ψ
2
2
2
(
)
(
)
(
)
(
)
=
⋅
+
−
⋅
+
−
⋅
+
−
⋅
+
−
I
I
I
I
M
M
M
M
M
M
M
M
23
2
32
2
23
15
2
51
2
15
14
2
41
2
14
12
2
21
2
12
ψ
ψ
ψ
ψ
2
375
.
0
0
0
0
25
.
0
5
.
1
m
EI
m
m
EI
⋅
=
+
+
+
−
⋅
⋅
−
=
=
I
k
2
,
(
)
=
∆
⋅
∆
⋅
+
⋅
+
−
=
∑
∑
I
s
S
I
s
s
I
ij
ij
I
ji
I
ij
I
I
L
L
k
M
M
k
δ
ψ
,
(
)
(
)
(
)
(
)
=
∆
⋅
∆
⋅
+
⋅
+
−
⋅
+
−
⋅
+
−
⋅
+
−
=
I
s
I
s
s
I
I
I
I
I
I
I
I
I
I
I
I
L
L
k
M
M
M
M
M
M
M
M
δ
ψ
ψ
ψ
ψ
23
32
23
15
51
15
14
41
14
12
21
12
3
3
2
4675
.
1
)
8
.
0
(
)
8
.
0
(
2
0
0
0
25
.
0
75
.
0
m
EI
m
EI
m
m
EI
⋅
=
−
⋅
−
⋅
⋅
+
+
+
+
−
⋅
⋅
−
=
,
(
)
=
⋅
⋅
−
⋅
+
−
=
∑
∑
p
I
p
p
I
ij
ij
o
ji
o
ij
Io
P
M
M
k
δ
ψ
(
)
(
)
(
)
+
⋅
+
−
⋅
+
−
⋅
+
−
⋅
+
−
=
I
o
o
I
o
o
I
o
o
I
o
o
M
M
M
M
M
M
M
M
23
32
23
15
51
15
14
41
14
12
21
12
)
(
ψ
ψ
ψ
ψ
I
I
I
I
I
P
P
P
P
P
5
5
4
4
3
3
2
2
1
1
δ
δ
δ
δ
δ
⋅
−
⋅
−
⋅
−
⋅
−
⋅
−
0
0
0
0
−
−
−
−
=
F
F
5
.
0
0
0
0
0
1
5
.
0
−
=
−
−
−
−
⋅
−
.
5.3
POSTAĆ SZCZEGÓŁOWA UKŁADU RÓWNAŃ I JEGO ROZWIĄZANIE
.
0
5
.
0
4675
.
1
375
.
0
375
.
0
,
0
375
.
0
375
.
0
3333
.
4
5
.
0
,
0
1042
.
1
375
.
0
5
.
0
5
.
3
3
2
2
1
2
2
2
1
2
2
1
=
⋅
−
⋅
⋅
+
⋅
⋅
+
⋅
⋅
=
⋅
−
⋅
⋅
+
⋅
⋅
+
⋅
⋅
=
⋅
−
⋅
⋅
+
⋅
⋅
+
⋅
⋅
F
m
EI
m
EI
m
EI
Fm
m
EI
m
EI
m
EI
Fm
m
EI
m
EI
m
EI
I
I
I
δ
ϕ
ϕ
δ
ϕ
ϕ
δ
ϕ
ϕ
ϕ
1
=
0.28311
EI
Fm
2
⋅
,
ϕ
2
=
0.03134
EI
Fm
2
⋅
,
δ
I
=
0.26036
EI
Fm
3
⋅
.
6.
RZECZYWISTE SIŁY PRZEKROJOWE
6.1
MOMENTY BRZEGOWE I SIŁY W WIĘZIACH SPRĘŻYSTYCH
Momenty brzegowe
(znakowane wg umowy statycznej) określono tabeli poniżej na podstawie
wzoru:
o
ij
I
I
ij
ij
ij
ij
M
M
M
M
M
+
⋅
+
⋅
+
⋅
=
δ
ϕ
ϕ
2
2
1
1
ϕ
1
=
0.28311
ϕ
2
=
0.03134
δ
Ι
=
0.26036
Mnożnik
Fm
2
/EI
Fm
2
/EI
Fm
3
/EI
M
1
M1*
ϕϕϕϕ
1
M
2
M2*
ϕϕϕϕ
2222
M
I
MI*
δδδδ
ΙΙΙΙ
M
O
M
Mnożnik EI/m
Fm
EI/m
Fm
EI/m
2
Fm
Fm
Fm
M
51
= -0.50 -0.14156
0
0.0000
0
0.0000
0.1667
0.0251
M
15
= 0.50
0.14156
0
0.0000
0
0.0000
0.3333
0.4749
M
12
= 1.00
0.28311
0.50
0.0157
0.375
0.0976
0
0.3964
M
21
= 0.50
0.14156
1.00
0.0313
0.375
0.0976
0
0.2705
M
14
= 2.00
0.56622
0
0.0000
0
0.0000
0.5625
1.1287
M
23
=
0
0.00000
1.3333
0.0418
0
0.0000
-0.3750
-0.3332
M
32
=
0
0.00000
0.6667
0.0209
0
0.0000
0.3750
0.3959
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
7
Siły w więziach sprężystych:
Fm
EI
Fm
m
EI
k
S
0627
.
0
03134
.
0
2
2
2
2
=
⋅
=
⋅
=
ϕ
ϕ
ϕ
,
F
EI
Fm
m
EI
L
k
S
I
I
s
4166
.
0
26036
.
0
)
8
.
0
(
2
3
3
−
=
⋅
−
⋅
=
⋅
∆
⋅
=
δ
δ
δ
.
Momenty brzegowe można też wyznaczyć na podstawie wzorów transformacyjnych, po
uprzednim określeniu rzeczywistych wartości kątów obrotów cięciw prętów na podstawie związku:
α
α
α
δ
ψ
ψ
⋅
=
∑
ij
ij
i rzeczywistych wartości obrotów końców prętów na podstawie związku
i
ij
ϕ
ϕ
=
.
6.2
BRZEGOWE SIŁY TNĄCE I OSIOWE ORAZ REAKCJE I KONTROLA STATYCZNEJ
DOPUSZCZALNOŚCI ROZWIĄZANIA
Siły tnące i osiowe oraz reakcje wyznaczamy z równań równowagi prętów i węzłów. W tym
celu układ dzielimy na pręty i węzły oraz obciążamy wydzielone elementy obciążeniem Danym i na
brzegach siłami brzegowymi (określonymi już momentami i szukanymi siłami osiowymi i tnącymi).
Przedstawiono to na rysunku poniżej. Na rysunku zaznaczono liniami przerywanymi włókna
wyróżnione do znakowania momentów zginających. Wyróżnienie to zostanie wykorzystane w punkcie
następnym.
δ
S
2
S
ϕ
Dla sił działających na każdy element wypisujemy 3 równania równowagi. Z sum momentów
względem końców prętów wyznaczamy siły tnące a z pozostałych równań wyznaczamy siły osiowe i
część z nich stanowi kontrolę statycznej dopuszczalności. W obliczeniach wykorzystujemy obliczone
już wartości momentów oraz wynikające z warunków podparcia wartości sił osiowych i tnących.
Tu
0
51
=
V
.
PRĘT 5-1
( )
0
2
2
2
2
15
15
51
5
=
⋅
+
⋅
+
+
=
∑
m
q
m
V
M
M
M
⇒
F
m
m
F
m
Fm
m
m
m
q
m
M
M
V
⋅
−
=
⋅
⋅
⋅
−
⋅
+
−
=
⋅
⋅
−
+
−
=
5
.
0
4
4
25
.
0
2
0251
.
0
4749
.
0
2
2
4
2
2
2
51
15
15
( )
=
⋅
−
⋅
+
+
=
∑
2
/
2
2
2
51
15
51
1
m
q
m
V
M
M
M
0
2
/
25
.
0
0
0251
.
0
4749
.
0
=
⋅
−
+
⋅
+
m
m
F
Fm
(spełnione tożsamościowo)
0
15
51
=
+
−
=
∑
N
N
X
⇒
15
51
N
N
=
(związek wykorzystamy dalej).
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
8
PRĘT 1-2
0
4
21
21
12
1
=
⋅
+
+
=
∑
m
V
M
M
M
⇒
F
Fm
m
m
M
M
V
⋅
−
=
⋅
+
−
=
+
−
=
1667
.
0
4
2705
.
0
3964
.
0
4
21
12
21
,
0
4
12
21
12
2
=
⋅
+
+
=
∑
m
V
M
M
M
⇒
F
Fm
m
m
M
M
V
⋅
−
=
⋅
+
−
=
+
−
=
1667
.
0
4
2705
.
0
3964
.
0
4
21
12
12
,
0
21
12
=
+
−
=
∑
N
N
X
⇒
21
12
N
N
=
(związek wykorzystamy dalej).
PRĘT 4-1
0
5
.
1
3
14
41
14
4
=
⋅
+
⋅
+
+
=
∑
m
F
m
V
M
M
M
⇒
F
F
Fm
m
Fm
m
m
M
M
V
⋅
−
=
⋅
−
⋅
+
−
=
⋅
−
+
−
=
8762
.
0
5
.
0
3
0
1287
.
1
3
5
.
1
3
41
14
14
,
0
5
.
1
3
41
41
14
1
=
⋅
−
⋅
+
+
=
∑
m
F
m
V
M
M
M
⇒
F
F
Fm
m
Fm
m
m
M
M
V
⋅
=
⋅
+
⋅
+
−
=
⋅
+
+
−
=
1238
.
0
5
.
0
3
0
1287
.
1
3
5
.
1
3
41
14
41
,
0
14
41
=
+
−
=
∑
N
N
X
⇒
41
14
N
N
=
(związek wykorzystamy dalej).
PRĘT 2-3
0
5
.
1
3
32
32
23
2
=
⋅
+
⋅
+
+
=
∑
m
F
m
V
M
M
M
⇒
F
F
Fm
m
Fm
m
m
M
M
V
⋅
−
=
⋅
−
⋅
+
−
−
=
⋅
−
+
−
=
5209
.
0
5
.
0
3
3959
.
0
3332
.
0
3
5
.
1
3
32
23
32
,
0
5
.
1
3
23
32
23
3
=
⋅
−
⋅
+
+
=
∑
m
F
m
V
M
M
M
⇒
F
F
Fm
m
Fm
m
m
M
M
V
⋅
=
⋅
+
⋅
+
−
−
=
⋅
+
+
−
=
4791
.
0
5
.
0
3
3959
.
0
3332
.
0
3
5
.
1
3
32
23
23
,
0
32
23
=
+
−
=
∑
N
N
X
⇒
23
32
N
N
=
(związek wykorzystamy dalej).
WĘZEŁ 2
0
)
0627
.
0
)
3332
.
0
(
2705
.
0
(
2
23
21
2
=
⋅
−
−
−
−
=
−
−
−
=
∑
Fm
S
M
M
M
ϕ
(spełnione tożsamościowo)
0
)
1667
.
0
(
23
23
21
=
+
⋅
−
−
=
+
−
=
∑
N
F
N
V
Y
⇒
F
N
⋅
−
=
1667
.
0
23
,
0
4791
.
0
21
23
21
=
⋅
−
−
=
−
−
=
∑
F
N
V
N
X
⇒
F
N
⋅
−
=
4791
.
0
21
,
Z trzeciego równania dla pręta 1-2 wyznaczamy
F
N
N
⋅
−
=
=
4791
.
0
21
12
,
Z trzeciego równania dla pręta 2-3 wyznaczamy
F
N
N
⋅
−
=
=
1667
.
0
23
32
,
WĘZEŁ 1
0
)
2
4749
.
0
1287
.
1
3964
.
0
(
15
14
12
1
=
⋅
+
−
−
−
=
+
−
−
−
=
∑
Fm
M
M
M
M
M
(spełnione tożsamościowo)
0
F
(-0.1667))
-
5
.
0
(
14
12
14
15
=
⋅
−
−
=
−
−
=
∑
N
V
N
V
Y
⇒
F
N
⋅
−
=
3333
.
0
14
0
)
8762
.
0
(
4791
.
0
15
14
12
15
=
⋅
−
−
⋅
−
−
=
−
+
−
=
∑
F
F
N
V
N
N
X
⇒
F
N
⋅
=
3971
.
0
15
,
Z trzeciego równania dla pręta 5-1 wyznaczamy
F
N
N
⋅
=
=
3971
.
0
15
51
.
Z trzeciego równania dla pręta 1-2 wyznaczamy
F
N
N
⋅
−
=
=
3333
.
0
14
41
.
WĘZEŁ PODPOROWY 3
0
3959
.
0
3
32
3
3
=
⋅
−
=
−
=
∑
Fm
M
M
M
M
⇒
Fm
M
⋅
=
3959
.
0
3
0
F
)
1667
.
0
(
3
32
3
=
⋅
−
−
−
=
−
−
=
∑
V
N
V
Y
⇒
F
1667
.
0
3
⋅
=
V
,
0
)
5209
.
0
(
3
32
3
=
⋅
−
−
=
+
=
∑
F
H
V
H
X
⇒
F
H
⋅
=
5209
.
0
3
,
WĘZEŁ PODPOROWY 4
0
F
)
3333
.
0
(
8
.
0
4166
.
0
cos
41
=
⋅
−
−
⋅
−
=
−
⋅
=
∑
N
S
Y
α
δ
(spełnione tożsamościowo),
0
)
6
.
0
4166
.
0
1238
.
0
(
sin
4
41
4
=
⋅
⋅
−
+
=
⋅
−
+
=
∑
F
H
S
V
H
X
α
δ
⇒
F
H
⋅
=
1262
.
0
4
,
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
9
WĘZEŁ PODPOROWY 5
0
0251
.
0
5
51
5
5
=
⋅
−
=
−
=
∑
Fm
M
M
M
M
⇒
Fm
M
⋅
=
0251
.
0
5
,
0
3971
.
0
5
51
5
=
⋅
+
=
+
=
∑
F
H
N
H
X
⇒
F
H
⋅
−
=
3971
.
0
5
.
Brzegowe siły tnące można też wyznaczyć na podstawie wzorów transformacyjnych analogicznie
jak momenty brzegowe jednak po uprzednim wyznaczeniu wartości brzegowych sił tnących w układzie
podstawowym od obciążenia danego
o
ij
V
(analogicznie jak
o
ij
M
.
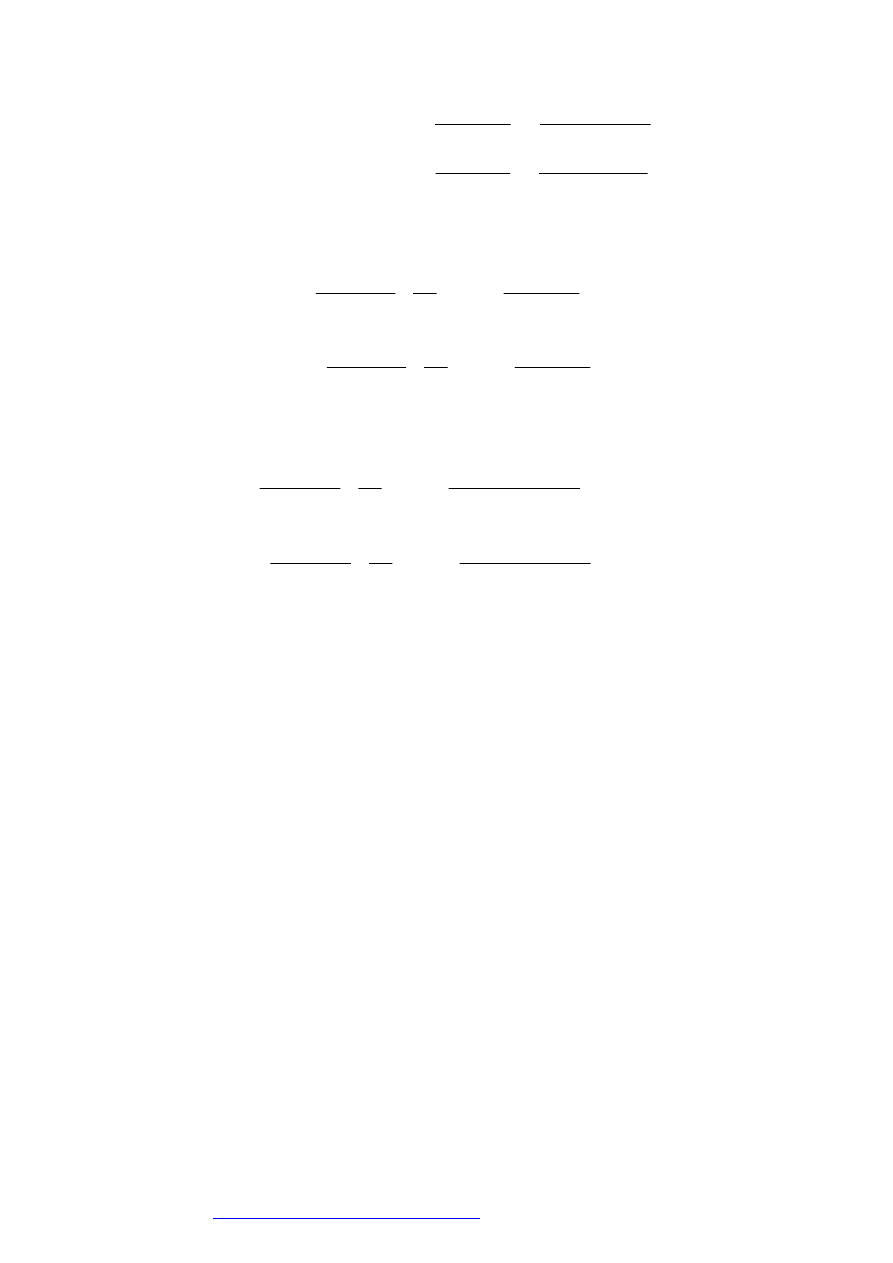
6.3
MOMENTY ZGINAJĄCE
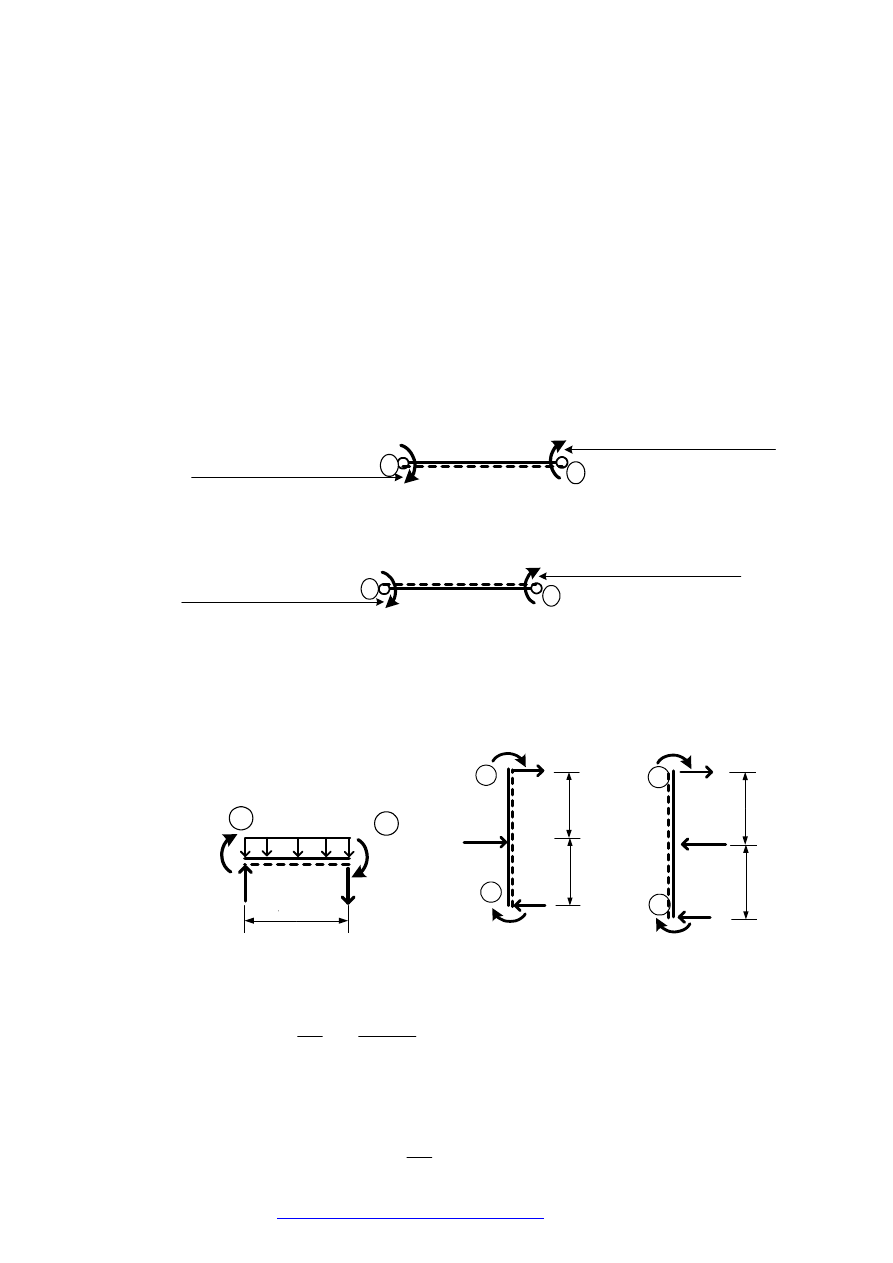
Otrzymane z obliczeń wartości momentów brzegowych są momentami statycznymi
znakowanymi zgodnie z zasadą: prawoskrętny „+”, lewoskrętny „
−
”. Nie są, więc bezpośrednio
momentami zginającymi, gdyż momenty zginające znakujemy zgodnie z zasadą: „+”, gdy rozciąga
włókna wyróżnione „
−
” gdy rozciąga włókna przeciwne niż wyróżnione, czyli gdy ściska włókna
wyróżnione. Odpowiedniość brzegowych momentów statycznych i momentów zginających na
końcach prętów zilustrowano na szkicach poniżej.
Momenty statyczne
dodatnie
Moment rozci
ą
ga włókna
przeciwne, wi
ę
c
wytrzymało
ś
ciowo jest
ujemny
Moment rozci
ą
ga włókna
wyró
ż
nione, wi
ę
c
wytrzymało
ś
ciowo jest
dodatni
ij
M
ji
M
i
j
ij
zgin
ij
ij
i
M
M
M
=
=
,
,
ji
zgin
ji
ij
j
M
M
M
−
=
=
,
,
ij
M
ji
M
i
j
Momenty statyczne
dodatnie
Moment rozci
ą
ga włókna
wyró
ż
nione, wi
ę
c
wytrzymało
ś
ciowo jest
dodatni
Moment rozci
ą
ga włókna
przeciwne, wi
ę
c
wytrzymałosciowo jest
ujemny
ij
zgin
ij
ij
i
M
M
M
−
=
=
,
,
ji
zgin
ji
ij
j
M
M
M
=
=
,
,
Obliczając momenty zginające (
,
,ij
i
M
ij
j
M
,
) należy oczywiście uwzględniać znaki momentów
statycznych (
,
ij
M
ji
M
).
Uwzględniając powyższe zasady określimy momenty zginające w przekrojach poszczególnych prętów.
q = 0.25 F/m
5
M
51
M
15
2m
V
51
=0
V
15
1
F
4
M
41
=0
V
14
M
14
V
41
1
.5
m
1
1
.5
m
3
M
32
M
23
V
23
V
32
2
1
.5
m
1
.5
m
F
PRĘT 5-1
=
=
51
51
,
5
M
M
Fm
0251
.
0
,
=
−
=
15
51
,
1
M
M
Fm
4749
.
0
−
Pręt jest obciążony równomiernie, więc wykres momentów jest parabolą.
Aby ją narysować niezbędna jest znajomość trzeciej rzędnej np. w środku rozpiętości pręta
=
⋅
⋅
⋅
−
⋅
+
=
4
2
2
51
51
51
51
51
51
,
L
L
q
L
V
M
M
S
Fm
m
m
m
F
m
Fm
1
.
0
5
.
0
1
/
25
.
0
1
0
251
.
0
.
0
−
=
⋅
⋅
−
⋅
+
PRĘT 1-2
=
=
12
12
,
1
M
M
Fm
3964
.
0
,
=
−
=
21
12
,
2
M
M
Fm
2705
.
0
−
PRĘT 4-1
=
=
41
41
,
4
M
M
0
,
=
−
=
14
41
,
1
M
M
Fm
1287
.
1
−
Pręt jest obciążony siłą skupioną. Należy, więc doliczyć rzędną pod siłą skupioną.
=
⋅
+
=
2
41
41
41
41
,
L
V
M
M
F
Fm
m
F
1857
.
0
5
.
1
1238
.
0
0
=
⋅
+
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
10
PRĘT 2-3
=
=
23
23
,
2
M
M
Fm
3332
.
0
−
,
=
−
=
32
23
,
3
M
M
Fm
3959
.
0
−
.
Pręt jest obciążony siłą skupioną. Należy, więc doliczyć rzędną pod siłą skupioną.
=
⋅
+
=
2
23
23
23
23
,
L
V
M
M
F
Fm
m
F
Fm
3855
.
0
5
.
1
4791
.
0
3332
.
0
=
⋅
+
−
.
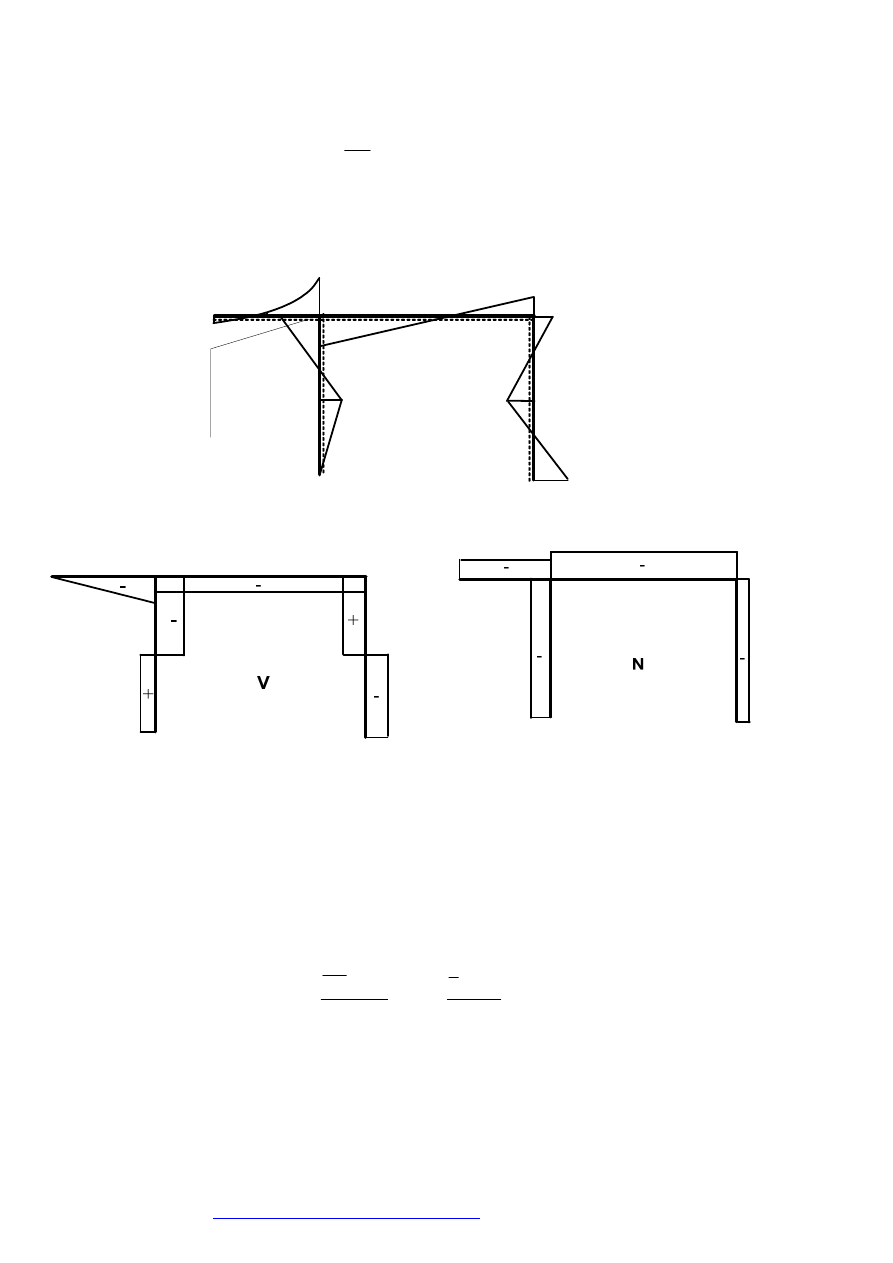
6.4
WYKRESY SIŁ PRZEKROJOWYCH
Sporządzając wykresy momentów zginających należy pamiętać, że ich rzędne odkłada się po
stronie włókien rozciąganych, co jest równoznaczne z tym, że rzędne dodatnie odkłada się po stronie
włókien wyróżnionych a ujemne po stronie przeciwnej.
M
+
-
+
-
-
+
+
-
-
F
m
0
2
5
1
.
0
Fm
4749
.
0
F
m
1.
0
Fm
3964
.
0
Fm
2705
.
0
Fm
3855
.
0
Fm
1857
.
0
Fm
3959
.
0
F
m
1
2
8
7
.
1
Fm
3332
.
0
Fm
4715
.
0
−
Fm
0928
.
0
Fm
0262
.
0
Fm
0052
.
0
−
F
m
0
6
3
.
0
F
5.
0
F
1
6
6
7
.
0
F
1
6
6
7
.
0
F
8762
.
0
F
1238
.
0
F
4791
.
0
F
5209
.
0
F
3
9
7
1
.
0
F
1667
.
0
F
4
7
9
1
.
0
F
3333
.
0
7.
KONTROLA KINEMATYCZNEJ DOPUSZCZALNOŚCI ROZWIĄZANIA
Aby mieć pewność, że rozwiązanie jest poprawne należy wykazać, że jest ono statycznie i
kinematycznie dopuszczalne.
Pierwszy warunek oznacza, że
siły muszą spełniać równania równowagi. Warunek ten
został sprawdzony w trakcie wyznaczania sił tnących, osiowych i reakcji.
Sprawdzenie drugiego warunku polega na sprawdzeniu czy wynikające z rozwiązania
przemieszczenia w poszczególnych punktach spełniają
warunki podparcia i ciągłości. Wystarczy
sprawdzenie tylu składowych przemieszczeń ile wynosi stopień statycznej niewyznaczalności.
Sprawdzenia kinematycznej dopuszczalności dokonamy wykorzystując wzory na przemieszczenia i
warunki wykorzystywane do budowy równań kanonicznych metody sił
rzecz
i
s
F
s
i
s
F
i
iF
k
S
S
dx
EI
M
M
,
∆
=
⋅
+
⋅
=
∆
∑
∫
Jak widać do dokonania sprawdzenia niezbędne jest wykonanie rozwiązań modelu statycznie
wyznaczalnego układu od sił jednostkowych przyłożonych w miejscach wyznaczanych przemieszczeń.
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
11
7.1
WYZNACZENIE STOPNIA STATYCZNEJ NIEWYZNACZALNOŚCI UKŁADU
5
1
3
8
3
=
⋅
−
=
−
=
t
e
n
h
7.2
PRZYJĘCIE MODELU STATYCZNIE WYZNACZALNEGO
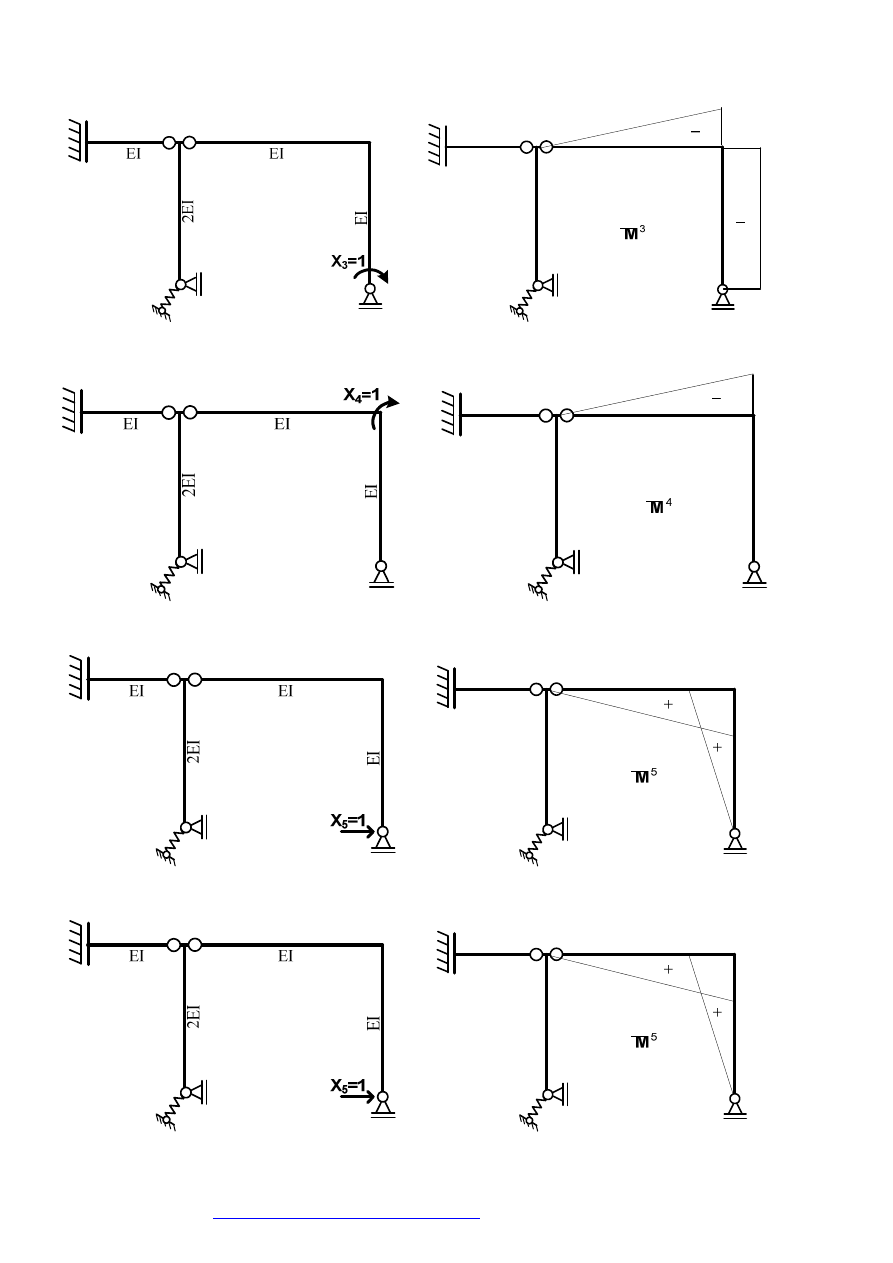
7.3
ROZWIĄZANIA MODELU STATYCZNIE WYZNACZALNEGO OD OBCIĄŻEŃ
JEDNOSTKOWYCH
Rozwiązanie od
1
1
=
X
1
0
2
=
ϕ
S
0
=
δ
S
Rozwiązanie od
1
2
=
X
EI
EI
X
2
=1
2
M
1
m
S
/
3125
.
0
−
=
δ
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
12
Rozwiązanie od
1
3
=
X
1
m
S
/
3125
.
0
=
δ
0
2
=
ϕ
S
Rozwiązanie od
1
4
=
X
1
0
2
=
ϕ
S
m
S
/
3125
.
0
=
δ
Rozwiązanie od
1
5
=
X
m
3
m
3
0
2
=
ϕ
S
9375
.
0
−
=
δ
S
Rozwiązanie od
1
6
=
X
m
3
m
3
0
2
=
ϕ
S
9375
.
0
−
=
δ
S
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
13
7.4
SPRAWDZENIE PRZEMIESZCZEŃ RZECZYWISTYCH W MIEJSCACH
PRZYJĘTYCH SIŁ HIPERSTATYCZNYCH.
(
)
+
⋅
−
⋅
−
−
⋅
−
⋅
+
−
⋅
⋅
⋅
=
⋅
⋅
=
∆
∫
Fm
EI
m
dx
EI
M
M
F
)
1
(
4749
.
0
)
1
(
)
1
.
0
(
4
)
1
(
0251
.
0
6
2
1
1
(
)
+
⋅
⋅
+
⋅
−
⋅
+
⋅
−
⋅
⋅
+
Fm
EI
m
5
.
0
1857
.
0
75
.
0
)
4715
.
0
(
4
1
1287
.
1
2
6
5
.
1
(
)
0
00019
.
0
0
25
.
0
0928
.
0
4
5
.
0
1857
.
0
2
6
5
.
1
,
1
2
=
∆
≈
⋅
=
⋅
+
⋅
⋅
+
⋅
⋅
⋅
+
rzecz
EI
Fm
Fm
EI
m
,
=
⋅
⋅
=
∆
∫
dx
EI
M
M
F
2
2
(
)
+
⋅
−
⋅
+
−
⋅
−
⋅
+
−
⋅
−
⋅
⋅
Fm
EI
m
)
5
.
0
(
1857
.
0
)
75
.
0
(
)
4715
.
0
(
4
)
1
(
1287
.
1
2
6
5
.
1
(
)
+
⋅
+
−
⋅
⋅
+
−
⋅
⋅
⋅
+
Fm
EI
m
0
)
25
.
0
(
0928
.
0
4
)
5
.
0
(
1857
.
0
2
6
5
.
1
(
)
=
−
⋅
−
+
⋅
+
−
⋅
⋅
+
−
⋅
⋅
⋅
+
3
/
2
)
/
3125
.
0
(
4166
.
0
0
)
5
.
0
(
063
.
0
4
)
1
(
3964
.
0
6
4
m
EI
m
F
Fm
EI
m
0
000025
.
0
,
2
2
=
∆
≈
⋅
−
=
rzecz
EI
Fm
,
=
⋅
⋅
=
∆
∫
dx
EI
M
M
F
3
3
(
)
+
⋅
−
⋅
−
−
⋅
⋅
+
⋅
⋅
Fm
EI
m
)
1
(
2705
.
0
)
5
.
0
(
063
.
0
4
0
6
4
(
)
+
⋅
−
⋅
+
−
⋅
⋅
+
−
⋅
−
⋅
⋅
+
Fm
EI
m
)
1
(
3855
.
0
)
1
(
0262
.
0
4
)
1
(
3332
.
0
6
5
.
1
(
)
+
⋅
−
⋅
−
−
⋅
−
⋅
+
−
⋅
⋅
⋅
+
Fm
EI
m
)
1
(
3959
.
0
)
1
(
)
0052
.
0
(
4
)
1
(
3855
.
0
6
5
.
1
=
⋅
−
+
3
/
2
/
3125
.
0
4166
.
0
m
EI
m
F
0
00024
.
0
,
3
2
=
∆
≈
⋅
−
rzecz
EI
Fm
,
=
⋅
⋅
=
∆
∫
dx
EI
M
M
F
4
4
(
)
+
⋅
−
⋅
−
−
⋅
⋅
+
⋅
⋅
Fm
EI
m
)
1
(
2705
.
0
)
5
.
0
(
063
.
0
4
0
6
4
=
⋅
−
+
3
/
2
/
3125
.
0
4166
.
0
m
EI
m
F
EI
Fm
m
EI
Fm
k
S
EI
Fm
rzecz
2
2
2
,
2
2
03135
.
0
/
2
0627
.
0
03124
.
0
⋅
=
=
=
∆
≈
⋅
ϕ
ϕ
,
0
00011
.
0
)
03135
.
0
03124
.
0
(
2
2
,
4
4
≈
⋅
−
=
⋅
−
=
∆
−
∆
EI
Fm
EI
Fm
rzecz
F
,
=
⋅
⋅
=
∆
∫
dx
EI
M
M
F
3
5
(
)
+
⋅
⋅
⋅
−
⋅
⋅
+
⋅
⋅
m
Fm
EI
m
3
2705
.
0
5
.
1
063
.
0
4
0
6
4
(
)
+
⋅
⋅
⋅
+
⋅
⋅
+
⋅
−
⋅
⋅
+
m
Fm
EI
m
5
.
1
3855
.
0
25
.
2
0262
.
0
4
3
3332
.
0
6
5
.
1
(
)
+
⋅
⋅
+
⋅
−
⋅
+
⋅
⋅
⋅
+
m
Fm
EI
m
0
75
.
0
)
0052
.
0
(
4
5
.
1
3855
.
0
6
5
.
1
=
−
⋅
−
+
3
/
2
)
9375
.
0
(
4166
.
0
m
EI
F
0
00056
.
0
,
5
3
=
∆
≈
⋅
rzecz
EI
Fm
METODA PRZEMIESZCZEŃ - przykład 1 – rama o siatce ortogonalnej
10.02.09
http://www.iil.pwr.wroc.pl/zukowski
14
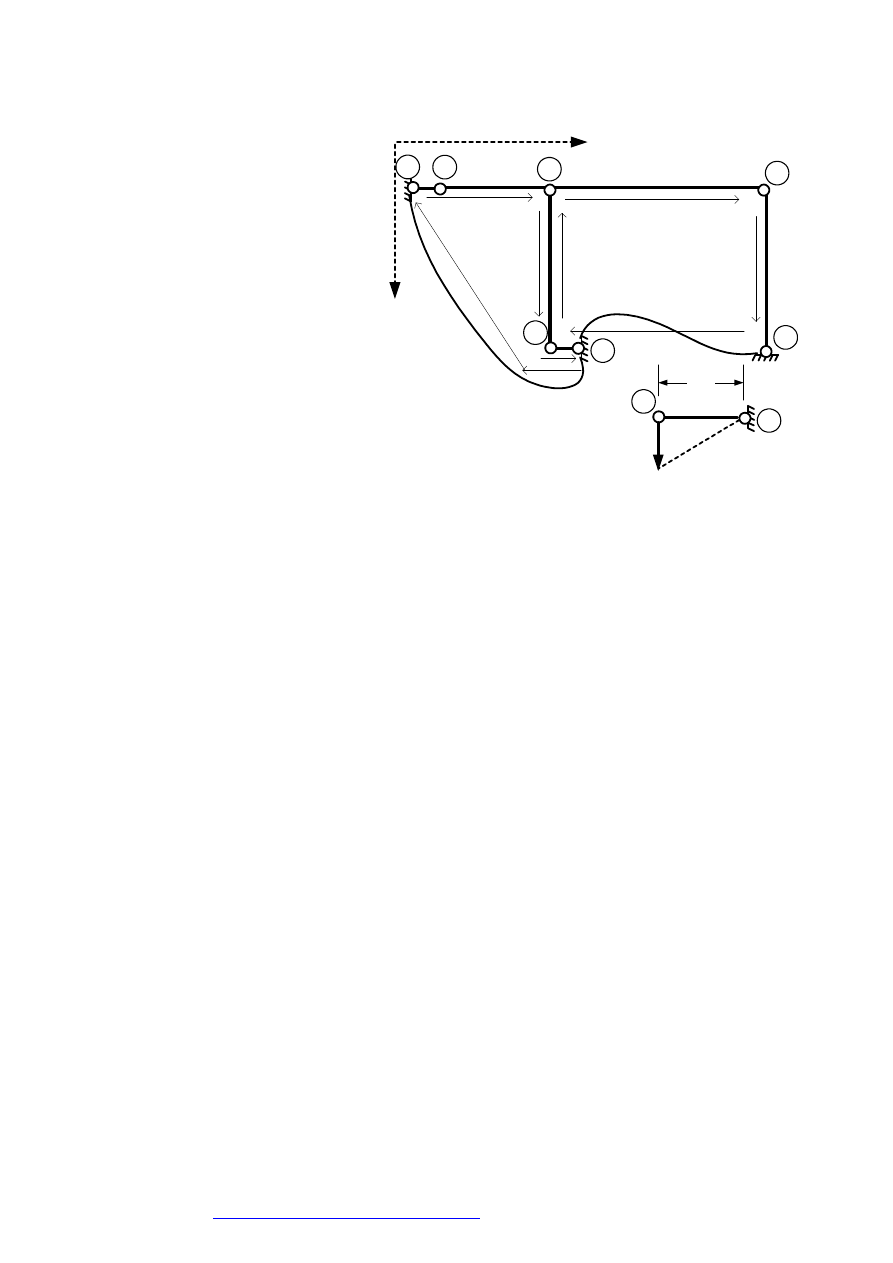
8.
DODATEK – SPOSÓB ANALITYCZNY WYZNACZANIA KĄTÓW OBROTÓW CIĘCIW
W celu wyznaczenia wartości kątów obrotu
cięciw prętów wykorzystamy związki
kinematyczne w postaci
∑
=
⋅
ij
ij
ij
Lx
0
ψ
,
i
∑
=
⋅
ij
ij
ij
Ly
0
ψ
, które muszą być spełnione
dla każdego zamkniętego ukierunkowanego
ciągu prętów.
W rozwiązywanym zadaniu
otrzymujemy (po uwzględnieniu
fundamentu) 2 zamknięte ciągi prętów
(rysunek obok), co daje 4 równania.
Długości więzi 4-A i 5-6 możemy przyjąć
dowolne. Niech wynoszą:
m
L
L
A
1
56
4
=
=
.
Stąd
m
A
A
/
1
4
4
−
=
=
ψ
ψ
. Znany jest też kąt obrotu pręta 1-5:
0
51
15
=
=
ψ
ψ
,
gdyż pręt „s-ł” przesuwa się równolegle. Pozostałe dane są następujące:
m
Lx
Lx
2
15
51
=
−
=
,
0
15
51
=
−
=
Ly
Ly
,
0
41
14
=
−
=
Lx
Lx
,
m
Ly
Ly
3
41
14
=
−
=
,
m
Lx
Lx
4
21
12
=
−
=
,
0
21
12
=
−
=
Ly
Ly
,
0
32
23
=
−
=
Lx
Lx
,
m
Ly
Ly
3
32
23
=
−
=
,
m
Lx
Lx
A
A
1
4
4
=
−
=
,
0
4
4
=
−
=
A
A
Ly
Ly
,
m
Lx
Lx
1
56
65
=
−
=
,
0
56
65
=
−
=
Ly
Ly
.
Dla ciągu pierwszego mamy równania:
∑
=
⋅
ij
ij
ij
Lx
ψ
=
⋅
+
⋅
+
⋅
+
⋅
A
A
Lx
Lx
Lx
Lx
4
4
14
14
51
51
65
65
ψ
ψ
ψ
ψ
0
1
0
2
0
1
14
65
=
−
⋅
+
⋅
+
⋅
ψ
ψ
m
m
(wynika stąd, że
m
/
1
65
=
ψ
),
∑
=
⋅
ij
ij
ij
Ly
ψ
=
⋅
+
⋅
+
⋅
+
⋅
A
A
Ly
Ly
Ly
Ly
4
4
14
14
51
51
65
65
ψ
ψ
ψ
ψ
0
0
3
0
0
0
4
14
65
=
⋅
+
⋅
+
⋅
+
⋅
A
m
ψ
ψ
ψ
,
(wynika stąd, że
0
14
=
ψ
),
Dla ciągu drugiego mamy równania:
∑
=
⋅
ij
ij
ij
Lx
ψ
=
⋅
+
⋅
+
⋅
+
⋅
23
23
12
12
41
41
4
4
Lx
Lx
Lx
Lx
A
A
ψ
ψ
ψ
ψ
0
0
4
0
0
1
23
12
=
⋅
+
⋅
−
⋅
+
−
ψ
ψ
m
,
(wynika stąd, że
m
/
25
.
0
12
−
=
ψ
),
∑
=
⋅
ij
ij
ij
Lx
ψ
=
⋅
+
⋅
+
⋅
+
⋅
23
23
12
12
41
41
4
4
Ly
Ly
Ly
Ly
A
A
ψ
ψ
ψ
ψ
0
3
0
/
25
.
0
)
3
(
0
0
23
4
=
⋅
+
⋅
−
−
⋅
+
⋅
m
m
m
A
ψ
ψ
(wynika stąd, że
0
23
=
ψ
).
1
3
2
4
5
x
y
1
2
A
6
4
δ
I
A
ψ
4A
L
4A
Wyszukiwarka
Podobne podstrony:
MP rama ort2 id 309055 Nieznany
MP CONF 3 35 id 308925 Nieznany
projekt 7 MP KL nr 7 id 832557 Nieznany
GW MP uczniowie % odp id 19790 Nieznany
MP 1987 029 0228 id 318265 Nieznany
MP przyk5 id 309053 Nieznany
MP 1987 029 0227 id 318264 Nieznany
MP 1988 025 0219 id 318266 Nieznany
mp cw2 id 309046 Nieznany
mp 5 id 574949 Nieznany
MP przyk1 id 309051 Nieznany
MP 1987 029 0228 id 318265 Nieznany
MP przyk5 id 309053 Nieznany
MP 1987 029 0227 id 318264 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
więcej podobnych podstron