UNIWERSYTET ZIELONOGÓRSKI
Zielona Góra 2002
Podstawy automatyki - laboratorium
S
S
p
p
i
i
s
s
t
t
r
r
e
e
ś
ś
c
c
i
i
Ćwiczenie 5. Budowa kombinacyjnych układów logicznych z elementów strumieniowych systemu SPAS 23
2

Podstawy automatyki - laboratorium
PODSTAWY AUTOMATYKI -lab.
ROK II semestr IV
Ćwiczenie 1.Właściwości statyczne wzmacniacza typu dysza - przysłona.
Zakres wymaganej wiedzy teoretycznej:
• podstawy budowy i działania wzmacniacza typu dysza - przysłona
• zastosowanie wzmacniacza typu dysza - przysłona
• sposób wyznaczania charakterystyki statycznej;
Ćwiczenie 2. Przetwornik elektro - pneumatyczny, badanie właściwości
statycznych.[1] [2]
Zakres wymaganej wiedzy teoretycznej:
• Przetwornik elektro - pneumatyczny zasada działania;
• sposób wyznaczania charakterystyki statycznej;
Ćwiczenie 3. Badanie właściwości statycznych pneumatycznego przyrządu
pierwiastkującego.[1] [2]
Zakres wymaganej wiedzy teoretycznej:
• pneumatyczny przyrząd pierwiastkujący -zasada działania;
• sposób wyznaczania charakterystyki statycznej;
• zastosowanie pneumatycznego przyrządu pierwiastkującego.
Ćwiczenie 4. Badanie właściwości statycznych elementów logicznych
systemu MERALOG.[1] [2] [4] [6]
Zakres wymaganej wiedzy teoretycznej:
• elementy systemu MERALOG budowa, działanie;
• sposób wyznaczania charakterystyki statycznej;
Ćwiczenie 5 Budowa kombinacyjnych układów logicznych z elementów
strumieniowych systemu SPAS. [1] [2] [4] [5] [6]
Zakres wymaganej wiedzy teoretycznej:
• podstawy zasad algebry logiki;
• funkcje logiczne, zapis, minimalizacja;
Ćwiczenie 6 Pomiar oporów pneumatycznych. [1] [2]
Zakres wymaganej wiedzy teoretycznej:
• rodzaje oporów pneumatycznych;
• teoretyczne i praktyczne wyznaczanie wartości oporów pneumatycznych
• systemy funkcjonalnie pełne: NOR, NAND;
• modelowanie funkcji logicznych na elementach logicznych NOR;
3
Podstawy automatyki - laboratorium
I. Charakterystyki statyczne.
I. Charakterystyki statyczne.
Podstawową zależnością charakteryzującą nieliniowy układ dynamiczny jest jego
charakterystyka statyczna, czyli zależność między jego sygnałem wyjściowym a sygnałem
wejściowym w stanach ustalonych, tj. przy założeniu, że wszystkie pochodne względem
czasu sygnałów i współrzędnych układu są równe zeru. Charakterystyka statyczna stanowi
zatem zbiór punktów równowagi układu.
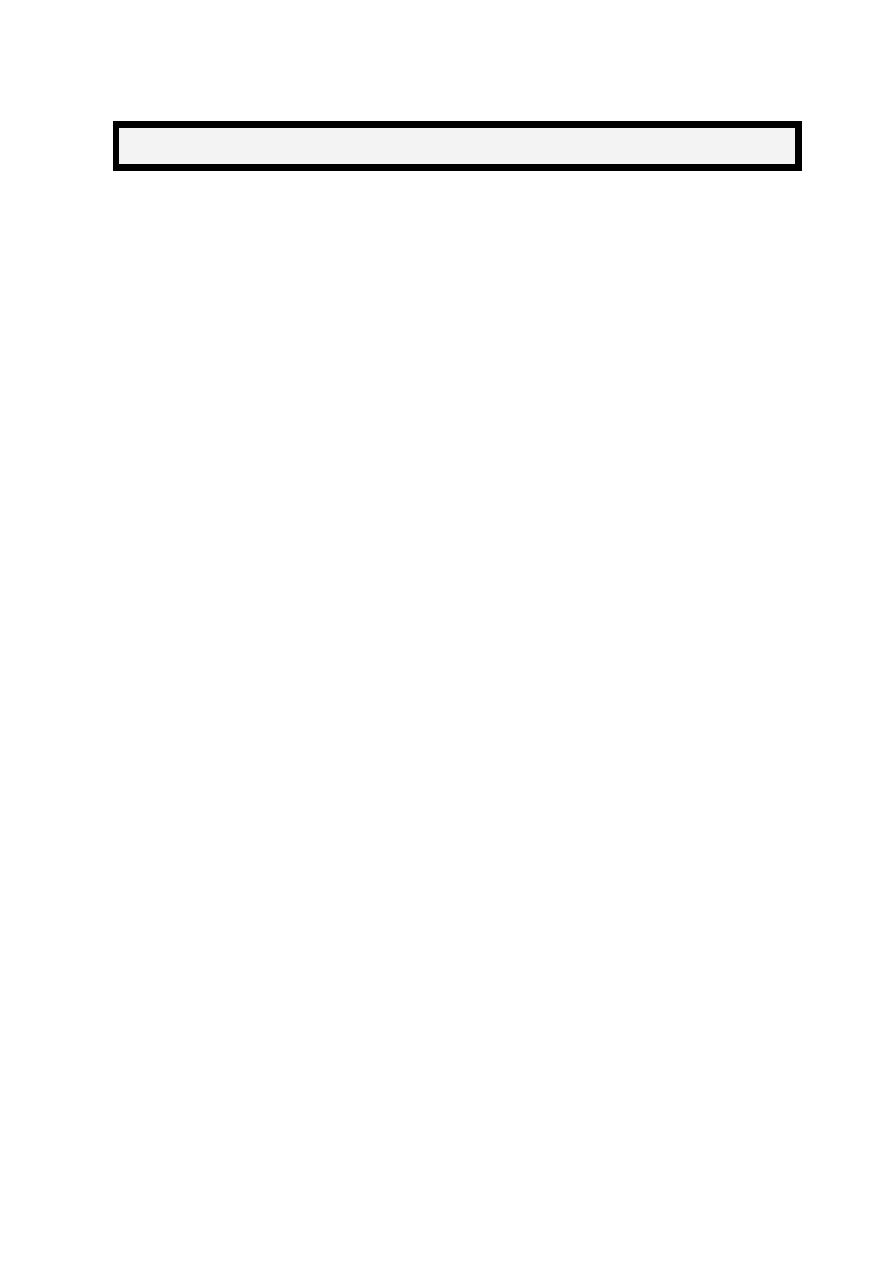
Rysunek I- 1 Typowe charakterystyki statyczne
4

Podstawy automatyki - laboratorium
Na rysunku I-1a obok charakterystyki układu liniowego (która jest oczywiście linią prostą)
zaznaczono charakterystykę z nasyceniem, jaką ma większość rzeczywistych układów
(typowy przykład - wzmacniacz elektroniczny) oraz jej aproksymację linią łamaną. Rys. I-
1b przedstawia charakterystykę ze strefą nieczułości (wywołaną np. tarciem statycznym w
układach mechanicznych) oraz jej aproksymację. Rys. I-1c- charakterystykę luzu (np.
przekładnia zębata z luzem). Rys. I-1d - charakterystykę zwykłego przekaźnika
elektromagnetycznego, jeśli sygnałem wejściowym jest prąd w uzwojeniu, sygnałem wyj-
ściowym zaś - prąd płynący przez styk. Przez analogię wszystkie charakterystyki nieciągłe
(zazwyczaj odcinkami stałe) są nazywane charakterystykami przekaźnikowymi, elementy
zaś o takich charakterystykach - elementami przekaźnikowymi. Rys. I-1e przedstawia
charakterystykę elementu przekaźnikowego dwustawnego (dwupołożeniowego) z tzw.
strefą histerezy (niejednoznaczności); idealna charakterystyka elementu dwustawnego jest
jednoznaczna. Rys. I-1f przedstawia charakterystyki elementu przekaźnikowego
trójstawnego (trójpołożeniowego): idealną (różniącą się od idealnej charakterystyki
elementu dwustawnego tylko punktem w środku układu współrzędnych) oraz rzeczywistą
(ze strefą nieczułości i histerezą)..
Należy jeszcze zwrócić uwagę, że liniowość charakterystyki statycznej nie dowodzi
liniowości własności dynamicznych układu; istnieje wiele układów (zwłaszcza wśród ukła-
dów sterowania) o liniowych charakterystykach statycznych, zaś wyraźnie nieliniowych
własnościach dynamicznych.
Charakterystykę statyczną danego układu można w prosty sposób wyznaczyć z jego
równań różniczkowych, przyjmując zerowe wartości pochodnych sygnałów.
5
Podstawy automatyki - laboratorium
W asności statyczne wzmacniacza typu DYSZA-
ł
PRZYSŁONA
1. Budowa i działanie wzmacniacza typu dysza – przysłona
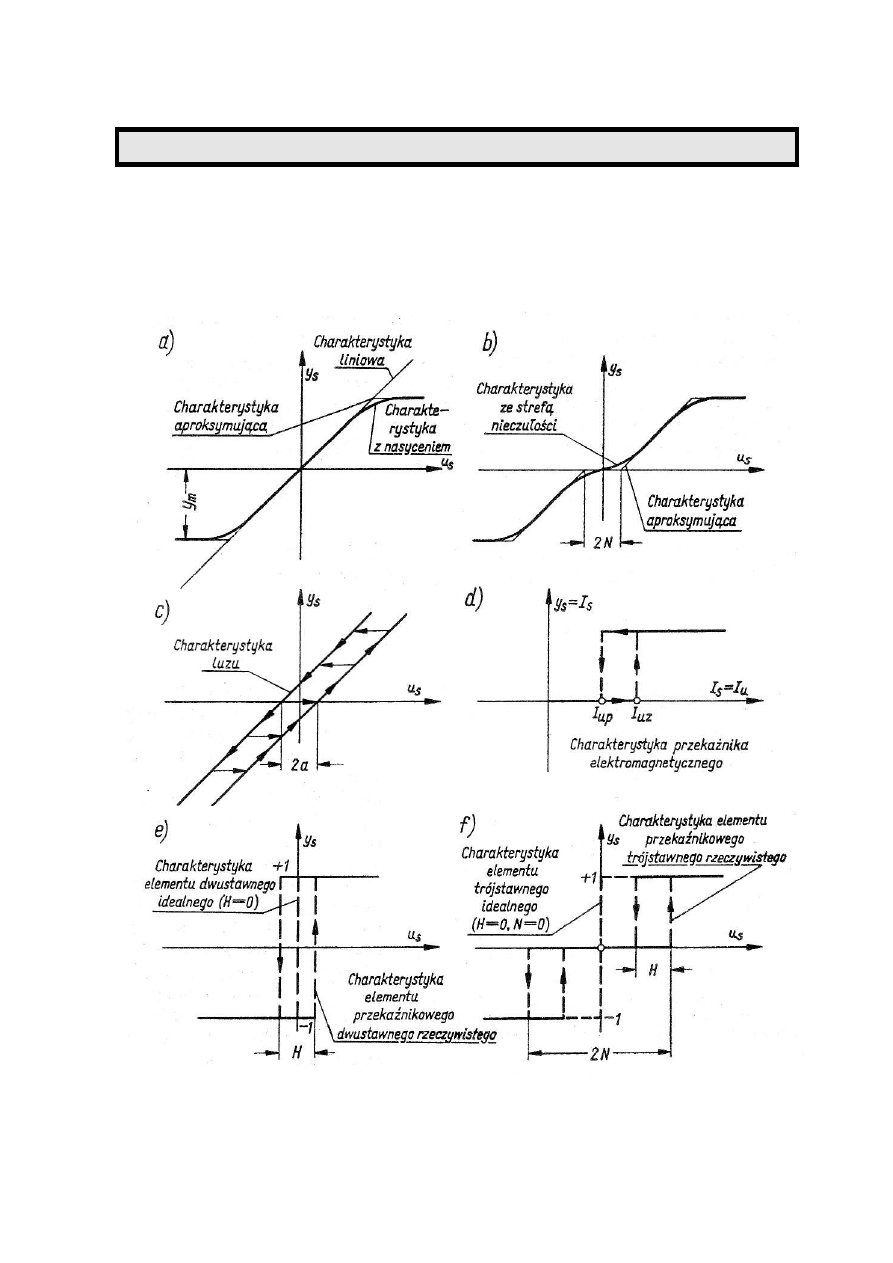
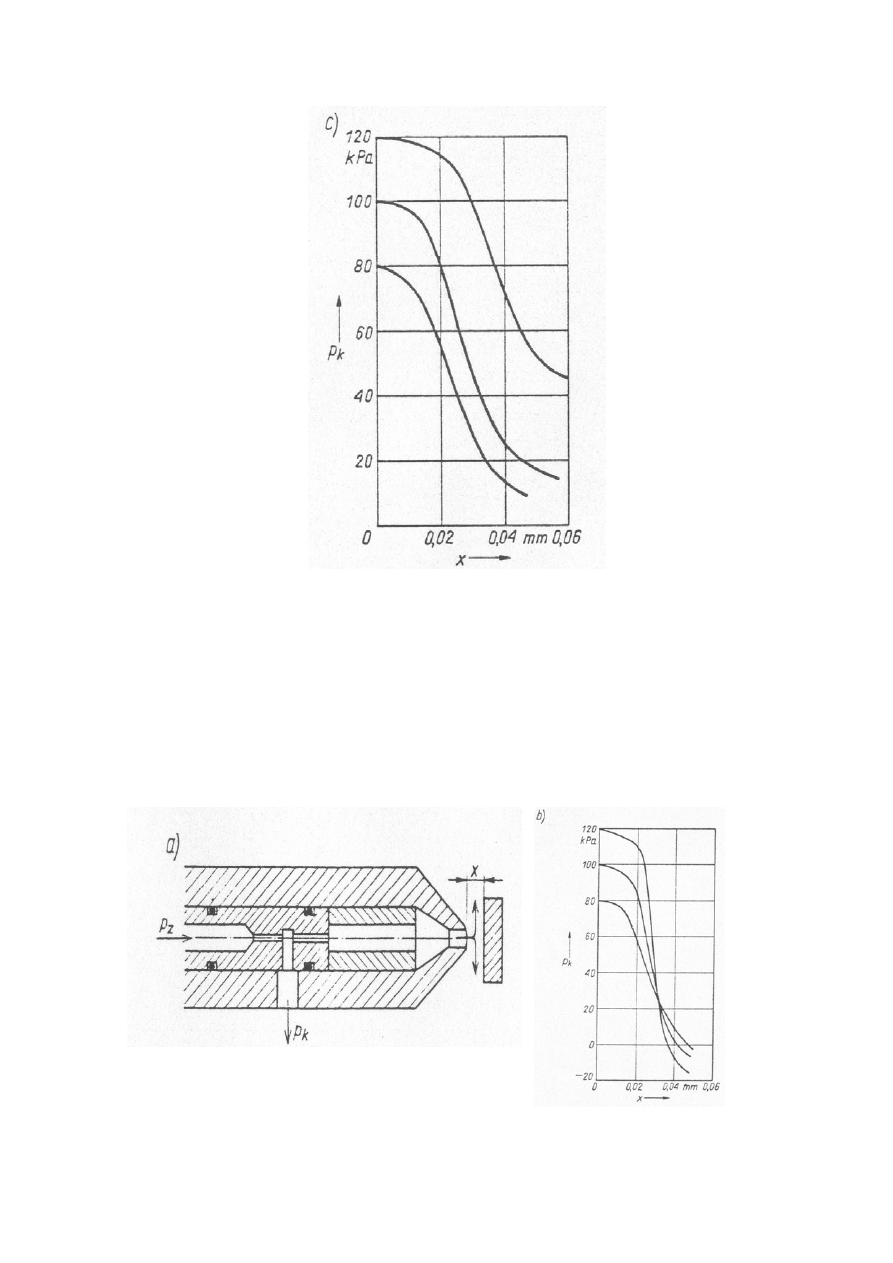
Rysunek 1.2 Wzmacniacz przysłonowy: a) schemat konstrukcyjny-gdzie: 1-opór stały; 2-komora
wyjściowa; 3-dysza; 4- przysłona; pz –ciśnienie zasilania; pk –ciśnienie kaskadowe; po –ciśnienie ośrodka b)
Wykres spadku ciśnienia
Powietrze zasilające o stałej wartości ciśnienia pz przepływa przez stały opór do komory
wyjściowej, a następnie przez dyszę do ośrodka o ciśnieniu po, najczęściej do atmosfery.
Suma spadków ciśnień na obu oporach ma wartość stałą i jest równa różnicy ciśnień pz i
po, a przy po = 0 po prostu ciśnieniu powietrza zasilającego pz. Opór dyszy wraz z
przysłoną zależy od położenia przysłony. Wraz ze zmianą położenia przysłony zmienia się
więc opór i spadek ciśnienia na dyszy. Ponieważ suma spadków ciśnień musi pozostać
stała i równa pz, jednocześnie musi więc ulec zmianie spadek ciśnienia na oporze stałym.
Łatwo wykazać, że w końcu jako rezultat zmiany położenia przysłony otrzymamy zmianę
ciśnienia kaskadowego pk. Mamy więc wzmacniacz, którego wielkością wejściową jest
przesunięcie przysłony, a wielkością wyjściową ciśnienie kaskadowe pk (rys.1.2).
6
Podstawy automatyki - laboratorium
Rysunek 1.3 Zależności sygnału wyjściowego ciśnienia p
k
od odległości dysza-przysłona dla trzech
wartości ciśnienia p
z
Zakres zmian odległości przysłony potrzebny do uzyskania określonych zmian ciśnienia
kaskadowego zależy od wymiaru dysz. Dla powszechnie stosowanych dysz o średnicach
wewnętrznych 0,3 ¸1 mm zmiany ciśnienia kaskadowego w zakresie 20¸80% pz uzyskuje
się przy przesunięciach przysłony rzędu kilku setnych części milimetra. Od wzmacniaczy
wymaga się dużego i stałego wzmocnienia (dużego i stałego nachylenia charakterystyki
statycznej) oraz niezależności sygnału wyjściowego od ciśnienia zasilania. Pod wszystkimi
tymi względami poprawę parametrów wzmacniacza przysłonowego uzyskuje się
zastępując opór stały
z
z
w
w
ę
ę
ż
ż
k
k
ą
ą
V
V
e
e
n
n
t
t
u
u
r
r
i
i
e
e
g
g
o
o (rys. 1.3).
Rysunek 1.4 Wzmacniacz przysłonowy ze zwężką Venturiego a)schemat konstrukcyjny b)zależność
sygnału wyjściowego ciśnienia p
k
od odległości x dysza- przysłona dla trzech wartości ciśnienia p
z
7
Podstawy automatyki - laboratorium
Jak wynika z charakterystyk, wybierając w tym wzmacniaczu punkt pracy w pobliżu
przecięcia krzywych otrzymanych dla różnych ciśnień zasilania można uzyskać dobrą
niezależność sygnału wyjściowego od ciśnienia zasilania. Ciekawa właściwość
wzmacniacza z dyszą Venturiego stanowi możliwość uzyskiwania wartości ujemnych
ciśnienia (mniejszych od ciśnienia atmosferycznego). Jest to skutek efektu ejektorowego
powodującego zasysanie - przy dużych prędkościach przepływu - powietrza z komory
wyjściowej do dyszy.
1.1. Cel
ćwiczenia i opis stanowiska pomiarowego
Celem ćwiczenia jest zapoznanie z budową, zasadą działania wzmacniaczy typu dysza-
przysłona, membranowych i mieszkowych, oraz poznanie ich własności statycznych.
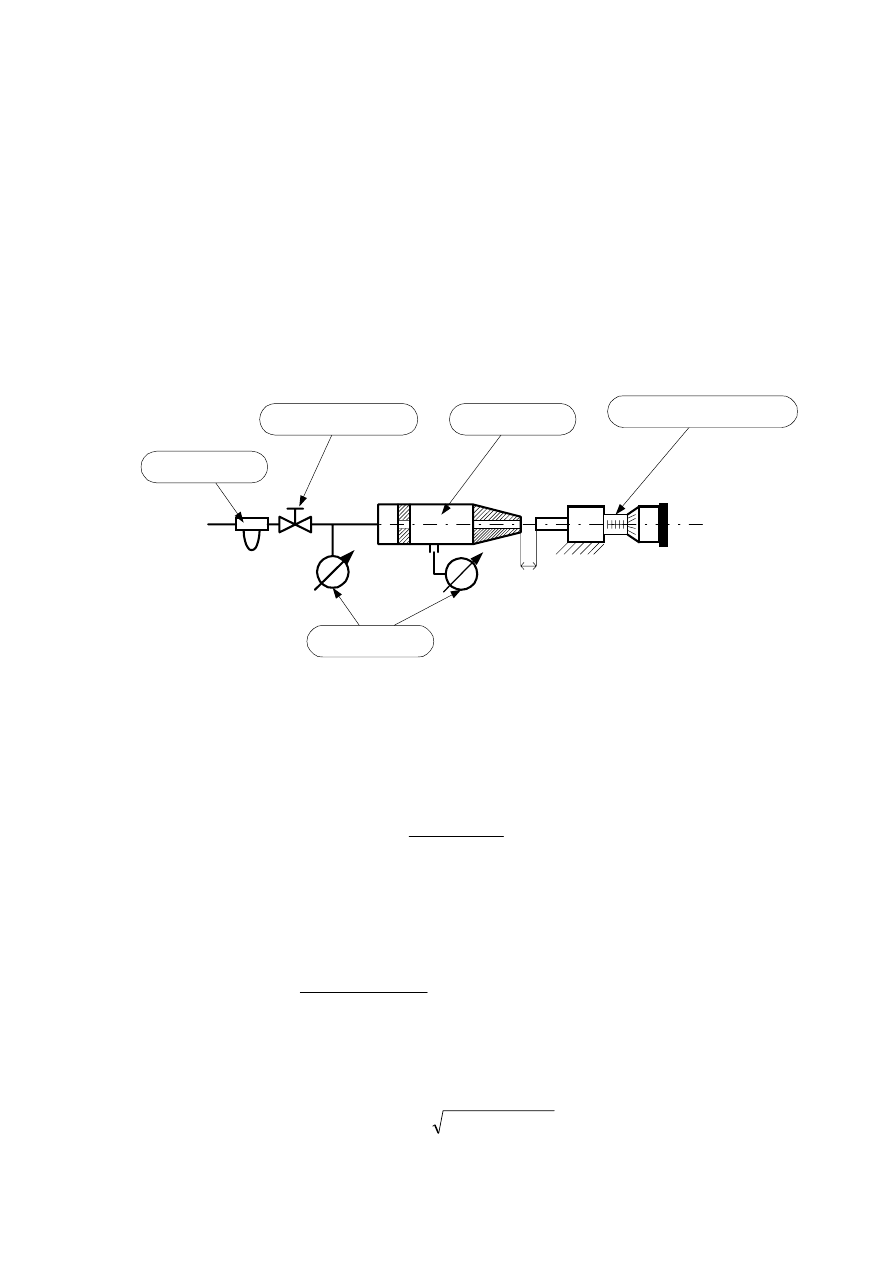
p
k
x
Filtr powietrza
Reduktor ciśnienia
Manometr
Wzmacniacz
Śruba mikrometryczna
P
o
P
1
Rys.1. 5 Schemat stanowiska pomiarowego
Wzory do wyznaczania charakterystyk statycznych:
Natężenie przepływu powietrza przez opór laminarny określa zależność:
π
η ⋅
⋅
−
=
l
RT
p
p
A
Q
m
16
)
(
2
2
2
1
2
kg/s
gdzie:
p
1
i p
2
– ciśnienie przed i za przewężeniem w Pa,
l – długość przewężenia w m,
A – pole przekroju przewężenia w m
2
π
η
ρ
⋅
⋅
⋅
−
=
l
p
p
A
Q
śr
m
8
)
(
2
1
2
-równanie Hagena-Poiseuille’a
gdzie:
śr
ρ - średnia gęstość powietrza w przewężeniu
W praktyce obliczeniowej równanie powyższe zastępuje się zależnością znacznie prostszą:
)
(
2
2
1
2
p
p
A
Q
m
−
−
⋅
⋅
⋅
=
ρ
ε
α
(3)
8
Podstawy automatyki - laboratorium
Zależność statyczną między przesunięciem przysłony x a ciśnieniem p
1
wyznacza się
z warunku równości natężeń przepływu powietrza wpływającego do komory przejściowej
(Q
m1
) i powietrza wypływającego z niej do atmosfery (Q
m2
)
Q
m1
= Q
m2
Korzystając ze wzoru (3) mamy:
)
2
)
(
2
1
2
2
2
1
0
1
1
1
p
A
p
p
A
⋅
⋅
⋅
⋅
=
−
−
⋅
⋅
⋅
ρ
ε
α
ρ
ε
α
Przyjmując że:
α
=
2
1
2
1
ε
ε
α
=
i
2
1
2
0
1
1
+
=
A
A
p
p
Ponieważ:
x
d
A
d
A
⋅
⋅
=
⋅
=
2
2
2
1
1
4
π
π
STĄD
2
2
1
2
0
1
d
4
1
p
p
x
d
⋅
⋅
+
=
gdzie: p
1
= p
k
; p
0
= p
z
2
2
1
2
z
k
x
d
d
4
1
p
p
⋅
⋅
+
=
4
d
x
2
max
=
gdzie:
p
k
- ciśnienie kaskadowe
d
1
– średnica oporu stałego (rys.1.2.)
d
2
– średnica oporu zmiennego (rys.1.2)
x
max
– maksymalna odległość przysłony od dyszy, przy której nie obserwuje się zmian
ciśnienia kaskadowego p
k
.
9
Podstawy automatyki - laboratorium
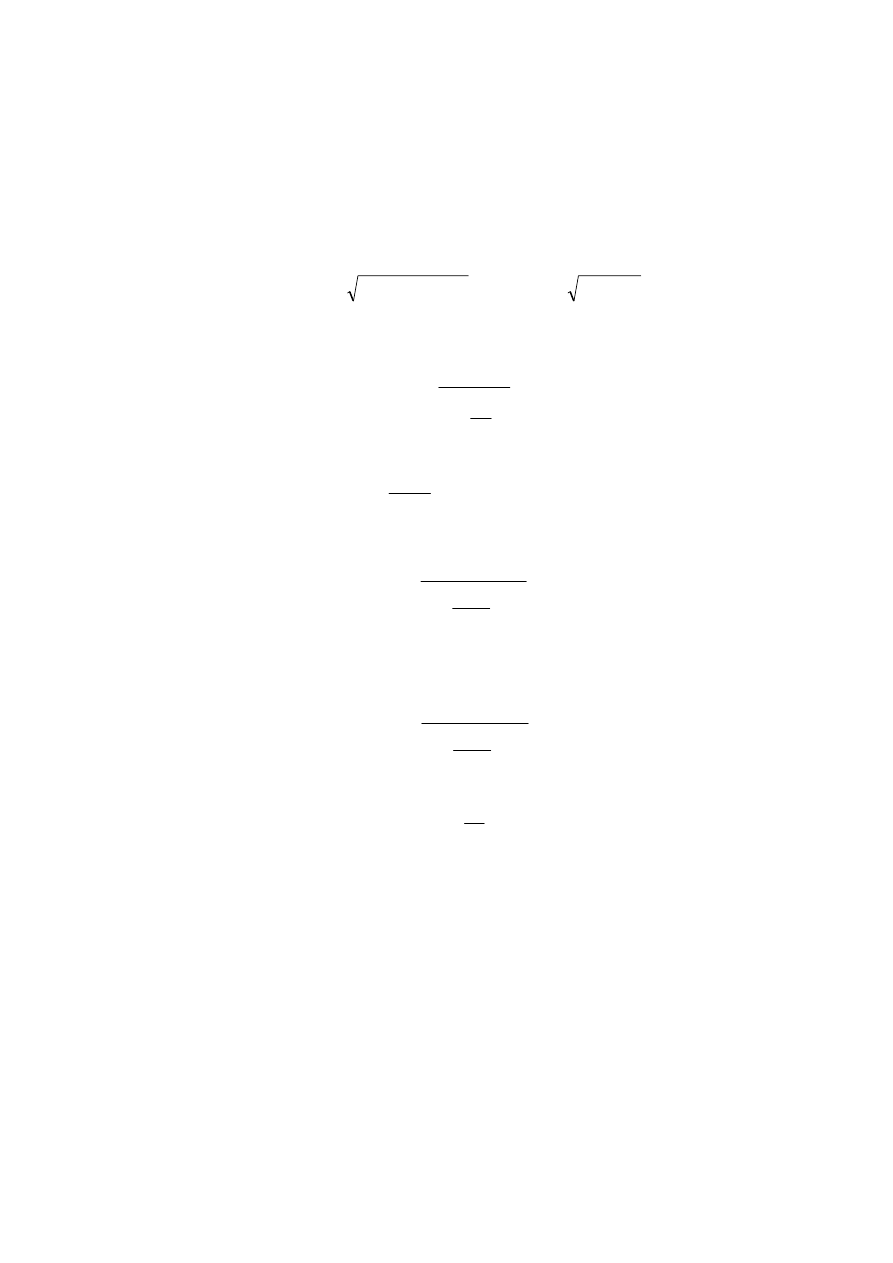
a)
x
d
2
d
1
x
p
k
1
2
b)
Rys.1.6 Wzmacniacz pneumatyczny dysza-przysłona a) schemat konstrukcyjny b)charakterystyki
statyczne 1-doświadczalna; 2-obliczeniowa
10
Podstawy automatyki - laboratorium
ĆWICZENIE 2 Przetwornik elektro - pneumatyczny,
badanie właściwości statycznych
2 Budowa i działanie przetwornika elektropneumatycznego i
pneumoelektrycznego
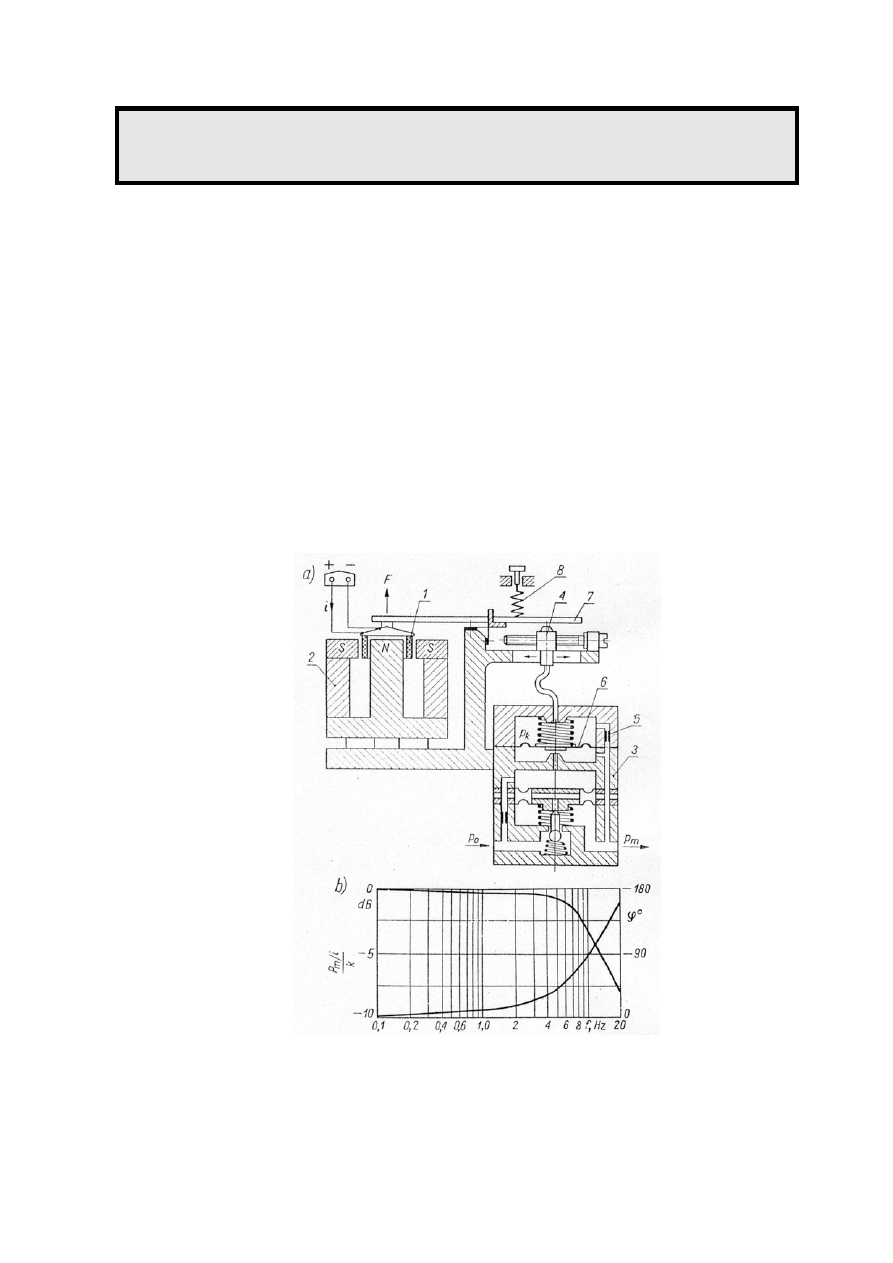
Przetwornik elektro-pneumatyczny analogowy typu EP-P3 (KFAP - Kraków)
(rys. 2.1) składa się z czujnika o wyjściu w postaci siły (cewka 1 i magnes stały 2) oraz
przetwornika pośredniego siły 3 działającego na zasadzie kompensacji sił. Przepływ prądu
i przez cewkę 1 wywołuje siłę F, która następnie jest przetwarzana na znormalizowany
sygnał pneumatyczny p
m
= 20
÷100 kPa w przetworniku pośrednim 3.
Przetwornik pośredni składa się z dwóch wzmacniaczy wstępnych typu dysza-przysłona i
wzmacniacza mocy. Wzmacniacz wstępny (dysza 4 i opór 5) zasilany jest powietrzem o
ciśnieniu wyjściowym p
m
, pozostałe wzmacniacze zasilane są powietrzem o stałym
ciśnieniu p
o
= 140 kPa.
Wzrost siły F wywołuje przymknięcie wylotu dyszy 4 i wzrasta ciśnienia działającego na
membranę 6. Wynikiem tego jest również wzrost ciśnienia wyjściowego p
m
które działając
od dołu na membranę 6 równoważy siłę działającą na tę membranę od góry oraz powoduje
równocześnie dodatkowy wzrost ciśnienia kaskadowego p
k
. Wynikiem tego jest
Rys. 2.1 Przetwornik elektropneumatyczny analogowy typu EP-P3 i jego charakterystyka częstotliwościowa
(KFAP - Kraków)
11
Podstawy automatyki - laboratorium
zwiększenie reakcji strumienia działającego na dźwignię 7. W ostatecznym efekcie
powoduje to pewne odsunięcie przysłony od dyszy 4 i zrównoważenie momentów
działających na dźwignię 7 (od siły F i siły reakcji strumienia wypływającego przez dyszę
4).
Współczynnik wzmocnienia przetwornika można zmieniać o 20% przez przesunięcie
dyszy 4 wzmacniacza wstępnego. Początkową wartość zakresu pomiarowego można
zmieniać również o 20°/o napięciem sprężyny 8. Dane techniczne przetwornika: klasa
dokładności -0,5; nominalne zakresy pomiarowe - 0
÷5; 0÷10, 0÷20; 0÷50 i 0÷100 mA,
przy rezystancjach wejściowych odpowiednio l250, 350, 85, 12 i 3,5Ω; częstotliwość
przenoszenia - 3Hz (rys. 2.2 b).
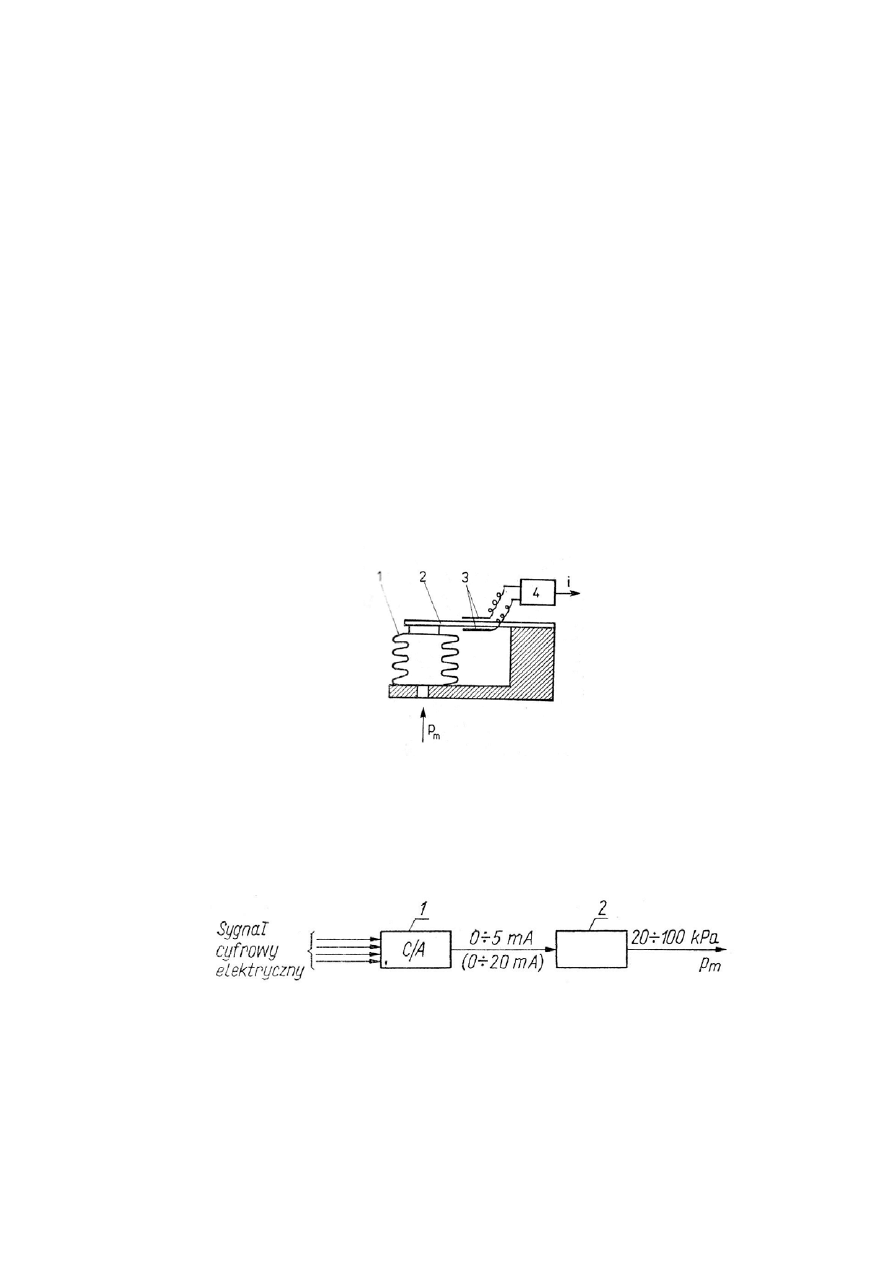
Przetwornik pneumoelektryczny analogowy typu A272 (PAP - Falenica)
przetwarza znormalizowany sygnał pneumatyczny p
m
= 20
÷100 kPa na sygnał elektryczny
i prądowy 0
÷5; 0÷20; 4÷20 mA lub napięciowy 1÷5 i 0÷10 V. Przetwarzany sygnał
ciśnieniowy p
m
, działając na mieszek 1 (rys. 2.2 ugina belkę sprężystą 2, na której naklejo-
no dwa półprzewodnikowe tensometry 3. Zmiana rezystancji tych tensometrów,
proporcjonalna do działającego ciśnienia p
m
, jest mierzona w bloku elektrycznym 4
zawierającym układ mostkowy z kompensacją temperaturową i wzmacniacz. Pomiar i
przetwarzanie ciśnienia na sygnał elektryczny odbywa się w układzie otwartym bez
sprzężenia zwrotnego. Błąd podstawowy przetwornika wynosi 0,4%, a błąd od zmiany
temperatury otoczenia - 0,25% na 10°C.
Rys. 2. 2 Przetwornik pneumoelektryczny analogowy typu A272 (PAP - Falenica)
Przetwornik elektropneumatyczny cyfrowo-analogowy może być zbudowany
z elektrycznego przetwornika cyfrowo-analogowego 1 (rys. 2.3) oraz przetwornika
elektropneumatycznego 2.
Rys. 2. 3 Schemat blokowy elektropneumatycznego przetwornika cyfrowo-analogowego
Znacznie prostszym i tańszym jest przetwornik przedstawiany na rys. 2.4. Składa się
on z równoważni pneumatycznej, zawierającej dźwignię 1, wzmacniacz typu dysza-
przysłona 2, mieszek sprzężenia zwrotnego 3 oraz sprężyny 4, przy czym ilość tych
sprężyn odpowiada ilości bitów przetwarzanego sygnału elektrycznego. Sprężyny 4
oddziałują na dźwignię 1 tylko wtedy, gdy odpowiednie bity sygnału cyfrowego
12
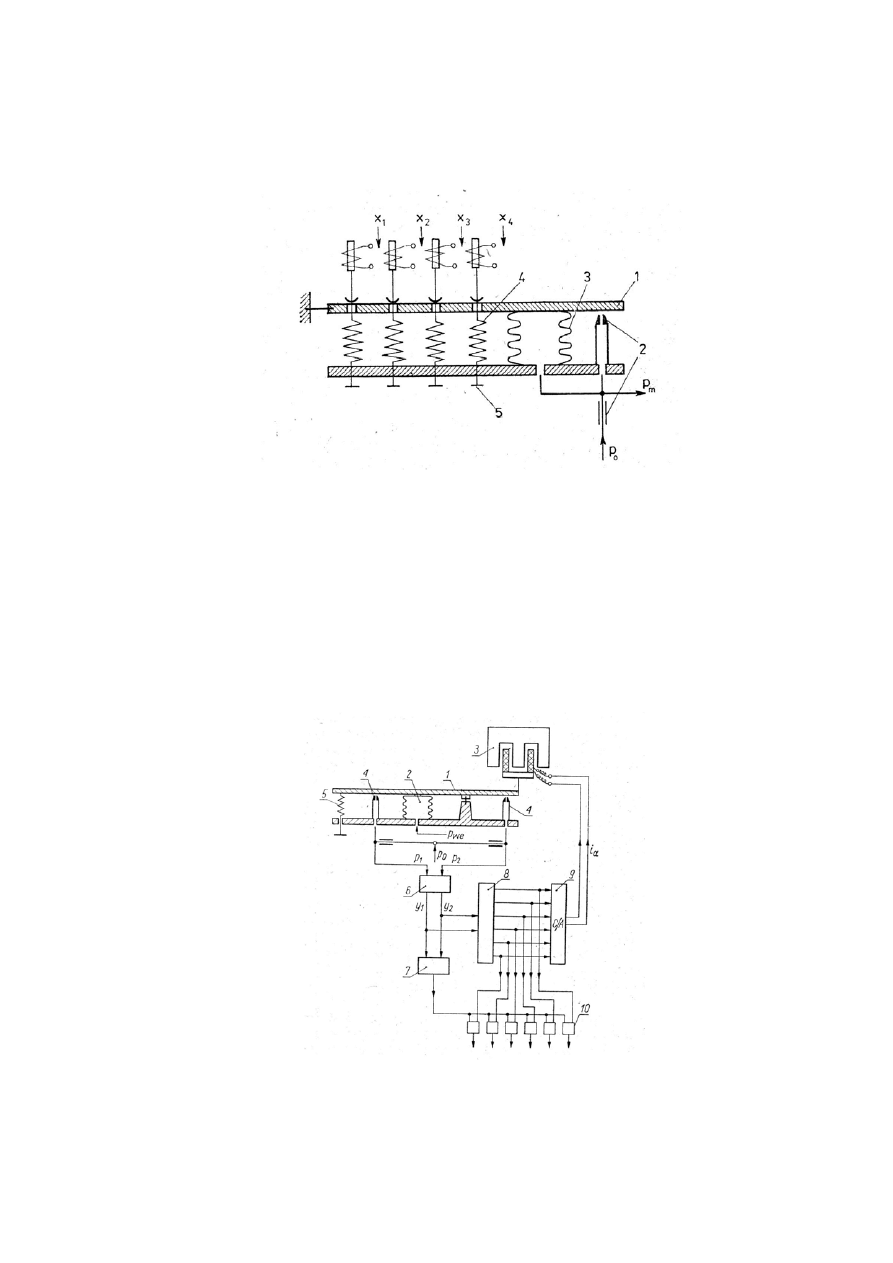
Podstawy automatyki - laboratorium
X
4
X
3
X
2
,X
1
przyjmują wartości jedynkowe. Rozmieszczenie oraz napięcie sprężyn
(nastawiane śrubami 5) są tak dobrane, aby zakresowi sygnału cyfrowego (np.
czterobitowego 1111) odpowiadał zakres sygnału pneumatycznego p
m
(np. 80 kPa).
Rys. 2. 4 Przetwornik elektropneumatyczny cyfrowo-analogowy
Przetwornik pneumoelektryczny analogowo-cyfrowy może być zbudowany z
analogowego przetwornika pneumoelektrycznego i elektrycznego przetwornika
analogowo-cyfrowego.
Inne rozwiązanie przedstawiono na rys. 2.5. Przetwornik składa się z równoważni
elektropneumatycznej zawierającej dźwignię 1, mieszka sprężystego 2 sygnału
wejściowego (przetwarzanego), silnika liniowego 3 (cewka z magnesem stałym), dwóch
wzmacniaczy pneumatycznych typu dysza-przysłona 4 i sprężyny zerującej 5. Ponadto
przetwornik stanowią: detektor odczytu 7, układ przełączający 8, elektryczny przetwornik
cyfrowo-analogowy 9 i bramki 10.
Rys. 2. 5 Przetwornik elektropneumatyczny cyfrowo-analogowy
Sygnał pneumatyczny p
we
podlegający przetworzeniu działa na mieszek 2, powodując
wychylenie dźwigni 1 ze stanu równowagi. Wywołuje to różnicę między ciśnieniami
13
Podstawy automatyki - laboratorium
wyjściowymi p
1
i p
2
wzmacniaczy 4. Różnicę tych ciśnień wykrywa detektor 6 zbudowany
z pneumatycznych e1ementów logicznych. Wysyłane do detektora odczytu i układu
przełączającego 8 sygnały y
1
i y
2
przyjmują wartości:
y
1
=0 i y
2
=0 gdy p
1
=p
2
y
1
=0 i y
2
=1 gdy p
1
>p
2
y
1
=1 i y
2
=0 gdy p
1
,p
2
Przy sygnałach y
1
≠y
2
w przełączniku 8 następuje kolejne zwieranie sześciu zestyków
elektrycznych, stanowiących sześciopozycyjny licznik impulsów elektrycznych. Z chwilą
wystąpienia odpowiedniego (właściwego) sygnału cyfrowego, którego wartość analogowa
i za pośrednictwem silnika 3 zrównoważy dźwignię l, nastąpi zrównanie ciśnień p
1
= p
2
, a
sygnały y
1
iy
2
przyjmują wartości zerowe.
Pod wpływem tych sygnałów zostaje przerwane zwieranie zestyków układu
przełączającego 8, a detektor odczytu 7 wysyła sygnał elektryczny na odblokowanie
bramek 10, umożliwiając wyjście sygnału cyfrowego na zewnątrz.
opracowa
ł
mgr in
ż
. Grzegorz Maniarski
14
Podstawy automatyki - laboratorium
ĆWICZENIE 3. Badanie właściwości statycznych
pneumatycznego przyrządu pierwiastkującego.
3 Pneumatyczne
przyrządy pierwiastkujące
Stosowane w przemyśle systemy blokowe pneumatycznej aparatury automatyki
charakteryzują się standardowym sygnałem roboczym oraz znormalizowanym sposobem
montażu i łączenia elementów, co umożliwia budowę wielu rodzajów układów sterowania
przez odpowiednie zestawienie tych samych typowych członów.
Poszczególne elementy systemu blokowego mają do spełnienia w układzie regulacji
określone funkcje. Zwykle wyróżnia się następujące grupy elementów:
a) elementy wejściowe - czujniki i przetworniki pomiarowe (spełniają funkcje uzyskiwania
i przetwarzania danych);
b) elementy części centralnej - regulatory i przyrządy liczące (spełniają funkcje
kształtowania sygnałów sterujących);
c) elementy wyjściowe - elementy wykonawcze (nastawniki i elementy napędowe),
wzmacniacze, ustawniki pozycyjne, itp.;
d) elementy pomocnicze - wskaźniki i rejestratory, stacyjki operacyjne, sygnalizatory,
bloki zasilające, itp.
Przyrządy pierwiastkujące należą do elementów części centralnej. Służą do wykonywania
operacji matematycznych na sygnałach pneumatycznych analogowych.
Celem ćwiczenia jest:
zapoznanie się z warunkami realizacji operacji algebraicznych ciągłych na sygnałach
analogowych,
poznanie budowy i zasady działania przyrządów pierwiastkujących,
zdjęcie ich charakterystyk statycznych,
wskazanie na zastosowanie przyrządów liczących w przemysłowych układach
automatycznej regulacji.
3.1 Budowa i zastosowanie przyrządu pierwiastkującego A 301
Zadaniem przyrządu pierwiastkującego jest przetwarzanie standardowego sygnału
pneumatycznego na inny sygnał pneumatyczny, mieszczący się w tym samym zakresie,
lecz stanowiący pierwiastek kwadratowy ciśnienia wejściowego. Realizowany jest
następujący algorytm
:
(
)
20
80
20
1
2
+
⋅
−
=
p
p
(1)
gdzie:
p
l
i p
2
- ciśnienie sygnału wejściowego i wyjściowego zmieniające się w granicach 20
÷100
kPa.
Przyrząd pierwiastkujący znajduje zastosowanie w układach automatycznej regulacji
natężenia przepływu, w których do pomiaru użyto zwężki. Podstawowym zadaniem
przyrządu jest linearyzacja charakterystyki kwadratowej zwężkowego układu
pomiarowego w celu uzyskania liniowej zależności między natężeniem przepływu przez
zwężkę a wskaźnikami pneumatycznego przyrządu wlotowego.
Na rysunku 3.1 przedstawiono schemat przyrządu pierwiastkującego A 301 produkcji
MERA-PNEFAL. Przyrząd działa na zasadzie równowagi przesunięć. Sygnał wejściowy
p
1
doprowadzony jest do komory I. Mieszek sprężysty 4 wraz ze sprężyną 6 o regulowanej
liczbie zwojów czynnych tworzy zespół przetwarzający ciśnienie na przesunięcie liniowe.
15
Podstawy automatyki - laboratorium
Trzpień mieszka 4 oddziałując na dźwignię 15 poprzez przegub taśmowy 14
,
zmienia
położenie przysłony względem dyszy 19 kaskady sterującej. Przesunięcie x przysłony
spowodowane sygnałem wejściowym p wynosi:
1
1
01
1
1
)
(
C
k
F
p
A
x
⋅
−
⋅
=
gdzie:
A
1
- powierzchnia efektywna mieszka 4,
F
01
- siła napięcia wstępnego zespołu przetwarzającego 4 - 6,
C
1
- sztywność zespołu przetwarzającego {mieszek 4, sprężyna 6),
k
1
- przełożenie mechaniczne.
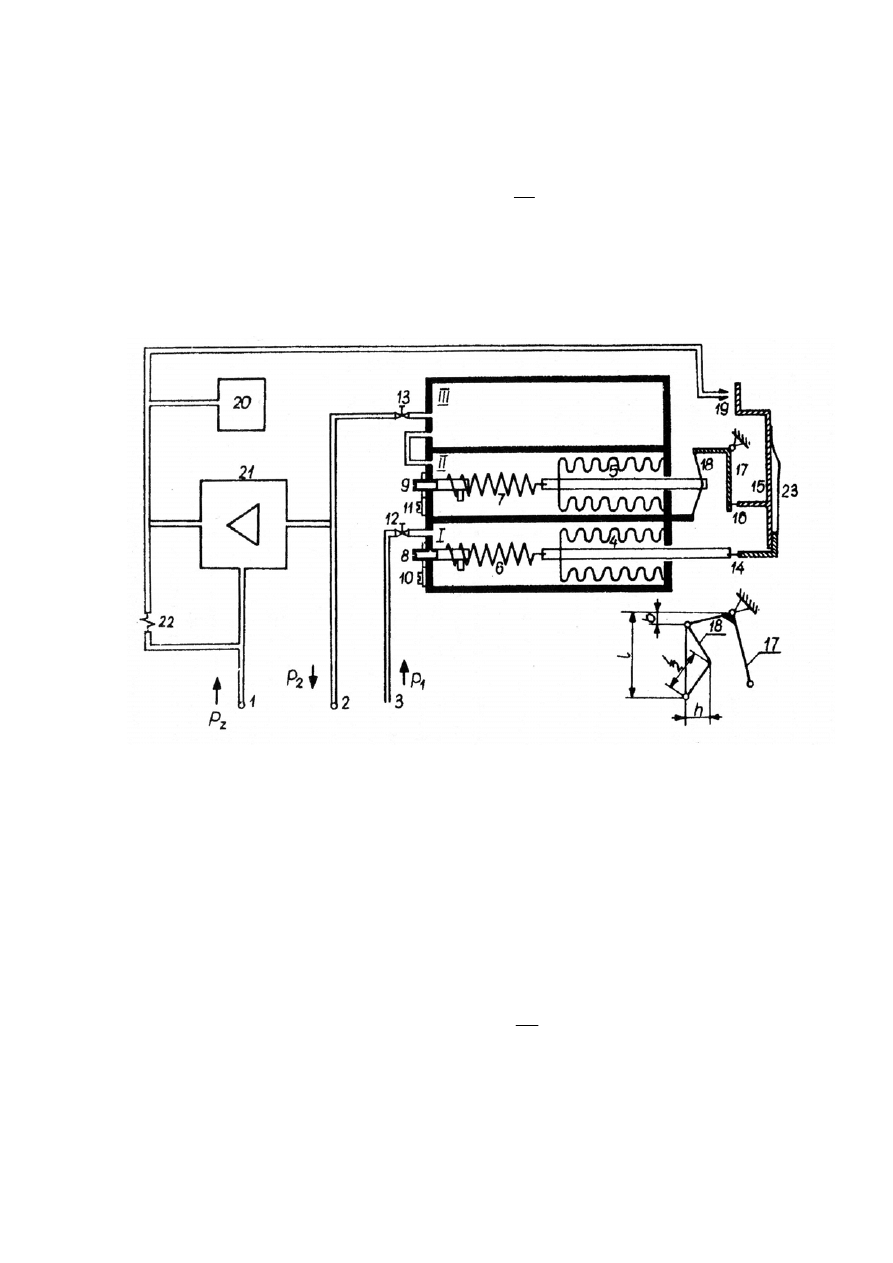
Rys. 3.1. Schemat przyrządu pierwiastkującego: 1-zasilanie, 2-wyjście, 3-wejście, 4.-mieszek wejściowy,
5-mieszek wyjściowy, 6-sprężyna wejściowa, 7-sprężyna wyjściowa, 8-wkręt nastawy zakresu zespołu
wejściowego, 9-wkręt nastawy zakresu zespołu wyjściowego, 10-wkręt zerujący zespołu wejściowego,
11-wkręt zerujący zespołu wyjściowego, 12-dławik tłumiący zespołu wejściowego, 13-dławik
pojemności tłumiącej, 14-przegub taśmowy dolny, 15-dźwignia, 16-przegub taśmowy górny, 17-
dźwignia kątowa, 18-sprężyna płaska, 19-dysza, 20-pojemność tłumiąca, 21-wzmacniacz, 22-dławik,
23-sprężyna przeciwprzeciążeniowa,I , II, III – komory
Ciśnienie kaskadowe p
k
stanowi sygnał wejściowy dla wzmacniacza mocy 21, którego
sygnał wyjściowy p
2
podany jest w charakterze ujemnego sprzężenia zwrotnego do
komory II mieszczącej drugi zespół przetwarzający (mieszek 5 - sprężyna 7).
Przesunięcie h trzpienia mieszka 5 jest równe
2
02
2
2
1
)
(
C
F
p
A
h
⋅
−
⋅
=
gdzie:
A
2
- powierzchnia efektywna mieszka 5,
F
02
- siła napięcia wstępnego zespołu przetwarzającego 5 - 7,
C
2
- sztywność zespołu przetwarzającego.
16
Podstawy automatyki - laboratorium
Zależność między ugięciem h taśmy sprężystej 18 i przemieszczeniem b końca dźwigni
kątowej 17 wyrażona jest zależnością:
2
2
2
2
=
−
+
l
b
l
h
Ponieważ
2
2
b
ma wartość pomijalnie małą, otrzymamy
2
2
b
l
h
⋅
=
Przesunięcie y przysłony spowodowane sygnałem wyjściowym p
2
wynosi
2
02
2
2
2
2
2
2
)
(
2
F
p
A
C
l
k
b
k
y
−
⋅
⋅
⋅
⋅
=
⋅
=
gdzie:
k
2
- przełożenie mechaniczne.
Można przyjąć, że
x
≅ y
i wtedy
2
02
2
2
2
2
2
01
1
1
1
1
)
(
2
)
(
F
p
A
C
l
k
F
p
A
C
k
−
⋅
⋅
⋅
⋅
=
−
⋅
⋅
Po wyjustowaniu przyrząd działa zgodnie z algorytmem (1). Regulacja przyrządu polega
na odpowiednim ustaleniu napięcia wstępnego i sztywności sprężyn zespołów
przetwarzających. Prawidłowo wyregulowany przyrząd powinien mieć charakterystykę
statyczną według tabeli 3.1 . Opory nastawione 12 i 13 służą do tłumienia drgań
przyrządów.
Tabela 3. 1
p
1
[kPa]
p
2
[kPa]
Natężenie
przepływu
[%]
23,2
36,0±0,4
20
27,2
44,0±0,4
30
40,0
60,0±0,4
50
59,2
76,0±0,4
70
100,0
100,0 ± 0,4
100
Dane techniczne przyrządu pierwiastkującego A 301 produkcji MERA PNEFAL
Ciśnienie zasilania p
4
140± 14 kPa
Sygnał wejściowy od 0% do 100% 20
÷100 kPa
Sygnał wyjściowy od 20% do 100% 36
÷100 kPa
Dopuszczalna temperatura otoczenia w miejscu zabudowy - 20° do + 60°C
Maksymalne odchylenie od charakterystyki teoretycznej w
zakresie ciśnień wyjściowych 36 do 100 kPa±0,5%
opracowa
ł
mgr in
ż
. Grzegorz Maniarski
17
Podstawy automatyki - laboratorium
Ć
Ć
W
W
I
I
C
C
Z
Z
E
E
N
N
I
I
E
E
4
4
.
.
B
B
a
a
d
d
a
a
n
n
i
i
e
e
w
w
ł
ł
a
a
ś
ś
c
c
i
i
w
w
o
o
ś
ś
c
c
i
i
s
s
t
t
a
a
t
t
y
y
c
c
z
z
n
n
y
y
c
c
h
h
e
e
l
l
e
e
m
m
e
e
n
n
t
t
ó
ó
w
w
l
l
o
o
g
g
i
i
c
c
z
z
n
n
y
y
c
c
h
h
s
s
y
y
s
s
t
t
e
e
m
m
u
u
M
M
E
E
R
R
A
A
L
L
O
O
G
G
.
.
4 Elementy logiczne i pamięciowe
Mimo istnienia kilkunastu podstawowych funkcji logicznych do budowy układów
logicznych stosuje się zaledwie kilka typów elementów logicznych. Są nimi najczęściej
elementy alternatywy i koniunkcji oraz ich negacje, a także elementy powtórzenia i
negacji.
Pneumatyczne elementy logiczne są w swej istocie zaworami wielodrogowymi,
sterowanymi sygnałami wejściowymi. Jedynkowy sygnał wyjściowy elementu logicznego
powstaje zwykle przez połączenie kanału wyjściowego albo z kanałem powietrza
zasilającego albo z jednym z kanałów wejściowych. Elementy pierwszego typu,
dysponujące sygnałem wyjściowy o znacznej mocy, nazywane są elementami czynnymi;
natomiast elementy drugiego typu, mające słaby sygnał wyjściowy biernymi. Łączenie w
szereg dwóch elementów biernych wymaga zastosowania między nimi wzmacniacza
sygnałów dwójkowych, którego rolę pełni element powtórzenia (z zasady czynny).
Pneumatyczne elementy logiczne i pamięciowe są budowane jako membranowe,
tłoczkowe, membranowo-tłoczkowe, kulkowe i strumieniowe.
4.1
Elementy systemu Meralog.
Podstawowymi elementami tego systemu są wielowejściowy element alternatywy i
wielowejściowy element negacji alternatywy. Budowę i zasadę działania tych elementów
rozpatrzymy na przykładzie elementów trzywejściowych (rys. 4.1).
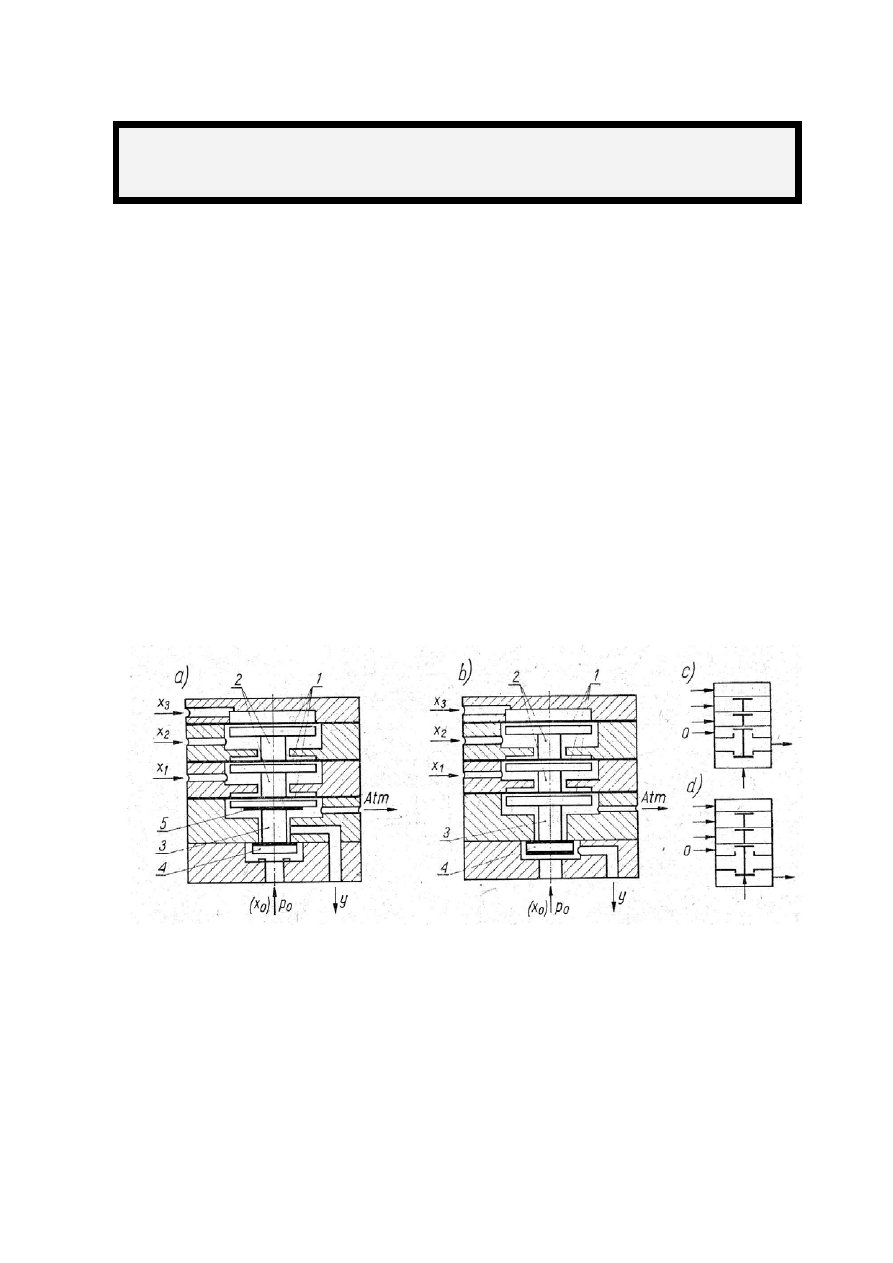
Rys. 4.1. Elementy logiczne systemu Meralog: a), c) trzywejściowy element alternatywny i
jego oznaczenie umowne, b), d) trzywejściowy element negacji alternatywy i jego
oznaczenie umowne
Elementy te zawierają trzy wiotkie membrany 1 oddzielające komory sygnałów
wejściowych x
l
, x
2
i x
3
, dwa popychacze pośredniczące 2 i popychacz przełączający 3
zaopatrzony w płytkę zamykającą 4. Membrany nie są związane ze sobą mechanicznie;
również końce popychaczy 2 nie są połączone z jakąkolwiek membraną. Różnica w
budowie elementów alternatywy i negacji alternatywy polega na różnym umiejscowieniu
18
Podstawy automatyki - laboratorium
kanału sygnału wyjściowego y oraz na dodaniu do popychacza 3 elementu alternatywy
pierścienia uszczelniającego 5.
Element alternatywy y = x
l
+x
2
+x
3
działa następująco. Gdy wszystkie sygnały wejściowe są
równe zeru x
l
= 0, x
2
= 0, x
3
= 0 popychacz 3 wraz z płytką 4 pod wpływem ciśnienia
zasilającego zajmuje górne położenie, łącząc kanał wyjściowy z atmosferą (y =0).
Natomiast gdy przynajmniej jeden z sygnałów wejściowych jest równy jedynce, wówczas
na popychacz 3 od góry zacznie działać siła, która będąc większą od siły ciśnienia
zasilania przemieści popychacz 3 w jego skrajne dolne położenie. W położeniu tym kanał
wyjściowy zostaje odcięty od atmosfery i połączony z kanałem powietrza zasilającego (y =
1).
Siły od ciśnień wejściowych działające na popychacz 3 są zawsze skierowane ku dołowi.
Jeżeli np. x
l
= l, x
2
= 0 i x
3
= 0, wówczas środkowa membrana uginając się nieznacznie do
góry przylgnie do przegrody korpusu, natomiast dolna membrana przylgnie do talerza
popychacza 3, przenosząc nań siłę od ciśnienia x
l
. Czynne powierzchnie talerza i płytki 4,
na którą działa ciśnienie zasilania, są tak dobrane, że przy sygnale wejściowym x
1
> 0,5p
0
siła wypadkowa popychacza skierowana jest w dół, a przy x
l
< 0,5p
o
siła ta skierowana jest
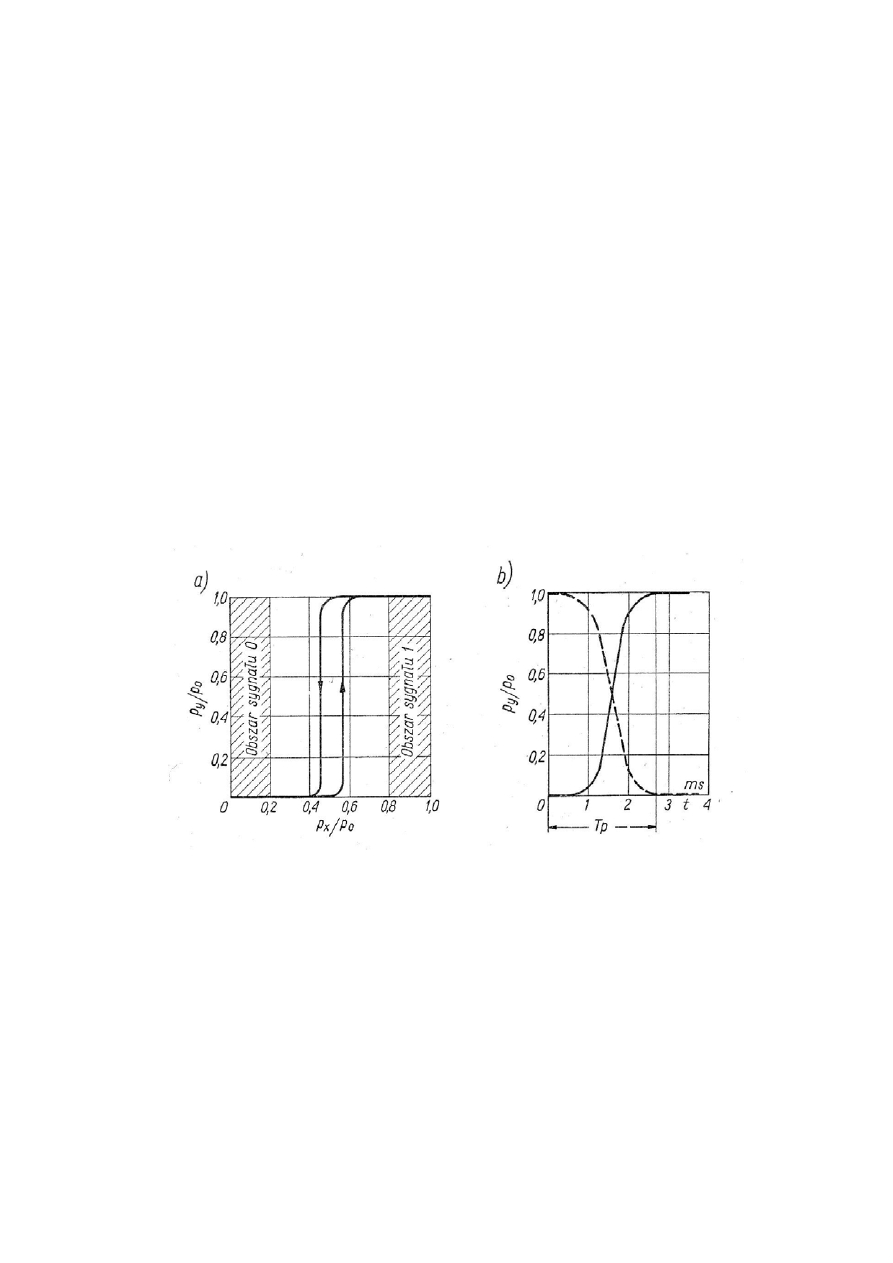
do góry. Jednak ze względu na rozrzut charakterystyk statycznych oraz na pewność
działania elementów logicznych za sygnał zerowy przyjmowane są ciśnienia w granicach
(0
÷0,2)p
o
, a za sygnał jedynkowy - ciśnienia w granicach (0,8
÷1,0)p
0
(rys.4.2) gdzie p
o
=
14MPa - ciśnienie zasilania.
Rys.4.2 Charakterystyki elementu powtórzenia systemu Meralog: a) statyczna, b)
dynamiczna, (skokowa)
Element alternatywy należy do elementów czynnych, gdyż jedynkowy sygnał wyjściowy
powstaje w wyniku połączenia kanału wyjściowego z kanałem powietrza zasilającego.
Jeżeli natomiast w elemencie alternatywy zamiast ciśnienia zasilania doprowadzić
dodatkowy czwarty sygnał wejściowy x
o
, wówczas otrzymuje się element bierny
realizujący funkcję
(
)
3
2
1
0
x
x
x
x
y
+
+
=
19
Podstawy automatyki - laboratorium
W elemencie negacji alternatywy
3
2
1
3
2
1
x
x
x
x
x
x
y
⋅
⋅
=
+
+
=
brak sygnałów wejściowych
x
l
= 0, x
2
= 0 i x
3
= 0 ~wywołuje ruch popychacza 3 do góry, przez co kanał wyjściowy
łączy się z kanałem powietrza zasilającego (y = 1). Zjawienie się co najmniej jednego
sygnału jedynkowego powoduje ruch popychaczy w dół, łącząc w ten sposób kanał
wyjściowy z atmosferą (y = 0).
Doprowadzając do elementu negacji alternatywy czwarty sygnał wejściowy x
o
otrzymuje
się element bierny realizujący funkcję
(
)
3
2
1
0
3
2
1
0
x
x
x
x
x
x
x
x
y
⋅
⋅
⋅
=
+
+
=
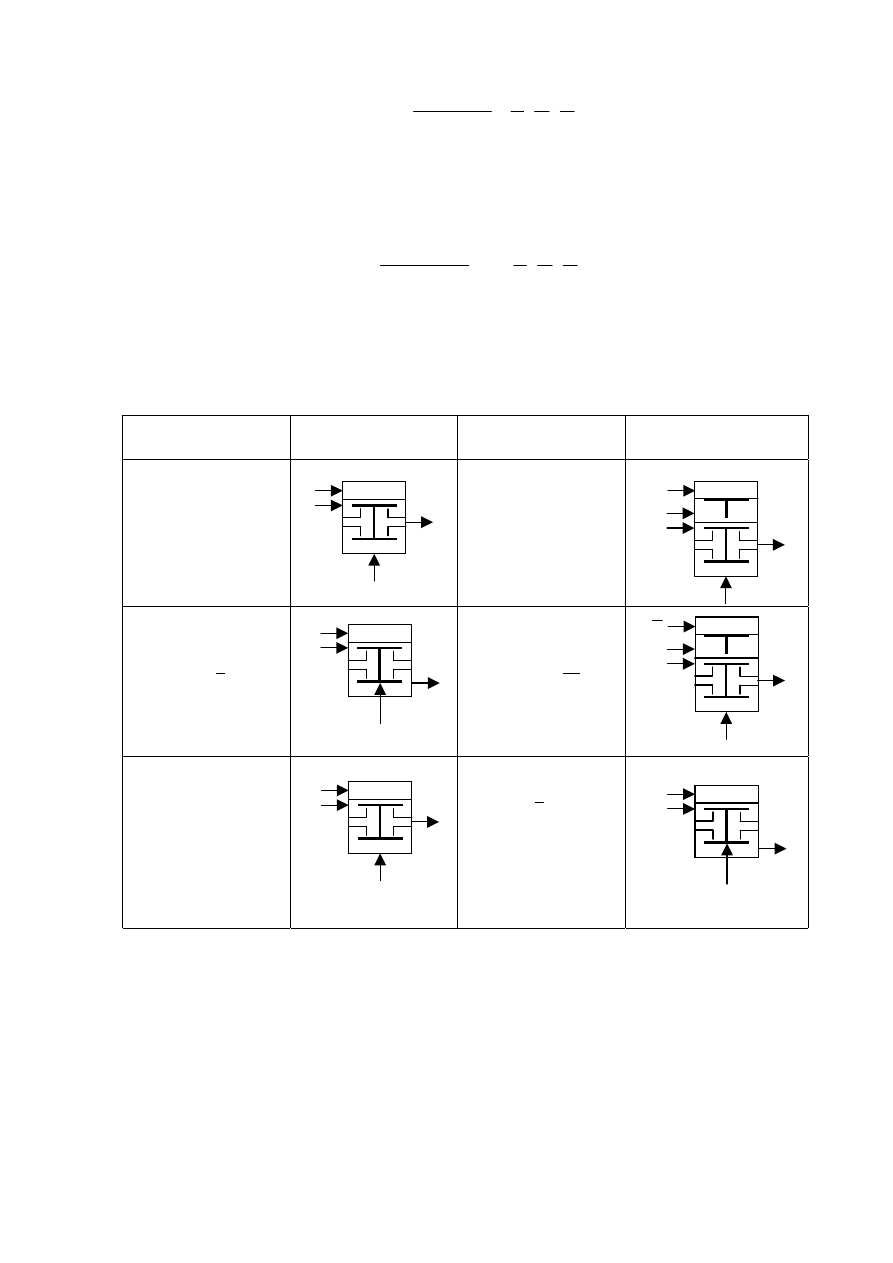
Elementy podstawowe wykonywane są od jedno- do czterowejściowych. W tabl. 4.1
przedstawiono schematy elementów Meralog do realizacji kilku podstawowych
dwuargumentowych funkcji logicznych.
Tablica 4.1 Elementy logiczne systemu MERALOG
Realizowane funkcje
System Meralog
Realizowane funkcje
System Meralog
Powtórzenie (TAK)
y = x
Alternatywa (LUB)
y = x
1
+ x
2
Negacja (NIE)
x
y
=
Implikacja
2
1
x
x
y
+
=
Koniunkcja (I)
y = x
1
⋅ x
2
Negacja implikacji
2
1
x
x
y
⋅
=
x
2
x
1
0
1
x
0
1
y
y
x
1
0
2
x
1
x
0
1
y
y
x
2
0
x
1
x
2
x
1
0
y
y
Funkcje
pamięci realizuje się za pomocą dwóch elementów podstawowych (rys.
4.3) lub specjalnych elementów pamięci.
Wymiary zewnętrzne elementów wynoszą: średnica - 20 mm, wysokości od 14 do 20 mm.
20
Podstawy automatyki - laboratorium
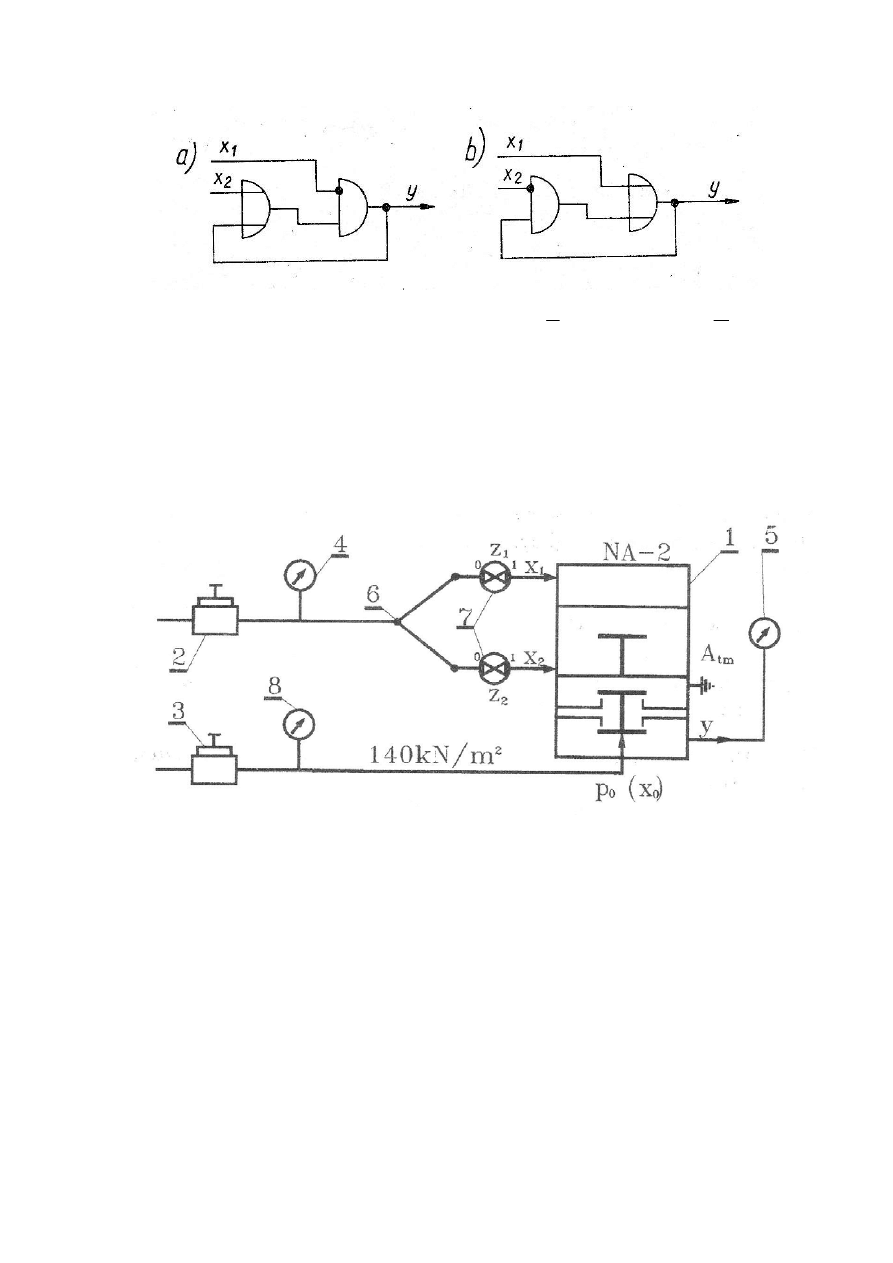
Rys. 4.3. Układy pamięci realizujące funkcje: a)
(
)
*
2
1
y
x
x
y
+
=
, b)
*
2
1
y
x
x
y
+
=
4.2
INSTRUKCJA
4.2.1 Cel ćwiczenia
Celem ćwiczenia jest zapoznanie ćwiczących z logicznym działaniem wybranych
pneumatycznych membranowych elementów logicznych systemu MERALOG oraz
badanie charakterystyk statycznych elementów logicznych.
Rys. 4.4. Schemat stanowiska pomiarowego - ćw. 4.
4.2.2 Opis stanowiska pomiarowego
Przedmiotem badań są elementy logiczne systemu MERALOG, element negacji EN-l,
element alternatywy dwuwejściowy A-2, element negacji alternatywy dwuwejściowy NA-
2. Na rysunku 4.4 pokazano schemat stanowiska badawczego. Do badanego elementu 1
doprowadzono za pośrednictwem nastawnika 3 ciśnienie zasilające element P
o
= 140
kN/m
2
. Nastawnikiem 2 nastawiane jest ciśnienie wejściowe P
x
i podane do trójnika 6.
Następnie poprzez zawory 7 ciśnienie doprowadzane jest do wyprowadzeń wejściowych
elementu logicznego. Pomiar tego ciśnienia dokonywany jest przy użyciu manometru.
Trójnik 6 oraz zawory Z
1
i Z
2
umożliwiają wprowadzenie do dwuwejściowych elementów
logicznych jednego lub dwóch jedynkowych sygnałów jednocześnie. Nastawnikiem 2
można zmieniać (zwiększać lub zmniejszać) ciśnienie P
x
. Sygnał wyjściowy P
y
mierzony
jest manometrem 5.
21
Podstawy automatyki - laboratorium
4.2.3 Przebieg ćwiczenia
Zestawić układ stanowiska według rysunku 19.4. Na zasilanie elementu podać ciśnienie
140 kN/m
2
. Zwiększać a następnie zmniejszać ciśnienie wejściowe P
x
w odstępach jednej
działki elementarnej użytego manometru w zakresie 0
÷140 kN/m
2
. Wymienione czynności
wykonać dla wszystkich badanych elementów. Wykreślić charakterystyki statyczne
elementów z zaznaczeniem obszaru sygnałów 1 i 0. Korzystając z powyższych
charakterystyk wyznaczyć szerokość stref histerezy H. Sprawdzić działanie logiczne
elementów (przygotować tablice stanów dla funkcji logicznych realizowanych przez ele-
menty, sprawdzić zgodność wartości funkcji y (ciśnienie wyjściowe P
y
) dla wszystkich
kombinacji sygnałów wejściowych przyjmując za 0 ciśnienie w zakresie 0
÷30 kN/m
2
; i za
1 ciśnienie 110
÷140 kN/m
2
.
4.2.4 Przykładowe pytania sprawdzające
Budowa i zasada działania elementu alternatywy systemu MERALOG.
Budowa i zasada działania elementu negacji alternatywy systemu MERALOG.
Charakterystyka statyczna dwuwejściowego elementu alternatywy oraz negacji
alternatywy.
Schemat i opis stanowiska badawczego.
opracowa
ł
mgr in
ż
. Grzegorz Maniarski
22

Podstawy automatyki - laboratorium
Ćwiczenie 5. Budowa kombinacyjnych układów logicznych
z elementów strumieniowych systemu SPAS
5 Wstęp
Rozwój automatyzacji procesów technologicznych, wprowadzanie urządzeń
automatycznych w różne dziedziny naszego życia, jak też stale rosnące wymagania
stawiane układom automatycznego sterowania zmuszają naukowców i inżynierów wielu
krajów do poszukiwań niezawodnych, prostych i tanich elementów automatyki,
umożliwiających realizację dowolnych algorytmów sterowania. Na początek lat
sześćdziesiątych przypadają poszukiwania nowych środków technicznych automatyzacji.
Powstała wtedy technika strumieniowa. Bazuje ona na płynowych elementach automatyki,
bez mechanicznych części ruchomych, zwanych elementami strumieniowymi. Praca ich
oparta jest na wykorzystaniu zjawisk związanych z przepływem i wzajemnym
oddziaływaniem strumieni płynu. Nośnikiem informacji w elementach strumieniowych jest
zmiana wartości ciśnienia lub natężenia przepływu czynnika roboczego, którym mogą być
różne gazy (powietrze, spaliny, gazy technologiczne itp.) lub ciecze.
Szerokie zainteresowanie elementami strumieniowymi jest uzasadnione ich licznymi
zaletami, do których należą:
- największa niezawodność, szybkość działania i najwyższy stopień miniaturyzacji
spośród wszystkich elementów mechanicznych automatyki,
- odporność na duże przyspieszenia i wibracje, niską i wysoką temperaturę, działania
pola magnetycznego i elektrycznego, promieniowanie radioaktywne i korozję,
- możliwość bezpiecznej pracy w warunkach grożących wybuchem,
- możliwość stosowania różnorodnych materiałów konstrukcyjnych oraz różnych
czynników roboczych,
- niski koszt produkcji i eksploatacji,
- prawie nieograniczona trwałość.
Pod względem stopnia miniaturyzacji i szybkości działania elementy strumieniowe
ustępują elementom elektronicznym. Ich szybkość działania ograniczona jest szybkością
dźwięku (elementów elektronicznych - szybkością światła). Jednak współczesne elementy
strumieniowe mają możliwość działania kilkaset, a niekiedy kilka tysięcy razy większą niż
szybkość działania klasycznych elementów pneumatycznych i hydraulicznych.
Częstotliwość ich pracy dochodzi do kilkudziesięciu kilo herców. Tego rzędu szybkość
działania jest w zupełności wystarczająca przy realizacji układów sterowania typowych
procesów technologicznych obrabiarek, silników spalinowych, turbin, operacji kontrolno-
pomiarowych itp.
Produkowane obecnie systemy elementów strumieniowych zawierają elementy części
centralnej, strumieniowe przetworniki różnych wielkości fizycznych oraz strumieniowe
elementy wykonawcze. Umożliwia to budowę układów sterowania złożonych wyłącznie z
elementów strumieniowych. W układach tych ważną rolę odgrywają strumieniowe
wzmacniacze analogowe. Spełniają one podstawową funkcję sumowania i wzmacniania
sygnałów. Stanowią zasadniczą część struktury regulatorów: P, PI, PD, PID o wyjściu
ciągłym. Umożliwiają wykonywanie podstawowych operacji matematycznych na
sygnałach (dodawanie, mnożenie, dzielenie, potęgowanie, pierwiastkowanie). Wchodzą w
skład czujników pomiarowych, umożliwiają przetwarzanie sygnałów ciśnieniowych na
częstotliwościowe przy przesyłaniu na duże odległości, a także umożliwiają współpracę z
maszynami cyfrowymi.
23
Podstawy automatyki - laboratorium
W elementach strumieniowych zmiany wartości sygnałów wyjściowych dokonuje się
wskutek oddziaływania na siebie strumieni płynu. Zgodnie z przedstawionymi założeniami
w elementach strumieniowych
nie występują części ruchome.
W działaniu elementów strumieniowych posłużono się wykorzystaniem typowych zjawisk
fizycznych takich jak: turbulencja strumienia głównego poprzez strumień sterujący,
przyleganie strumienia do ścianek: tzw. efekt Coandy, zawirowanie strumienia w komorze
wirowej.
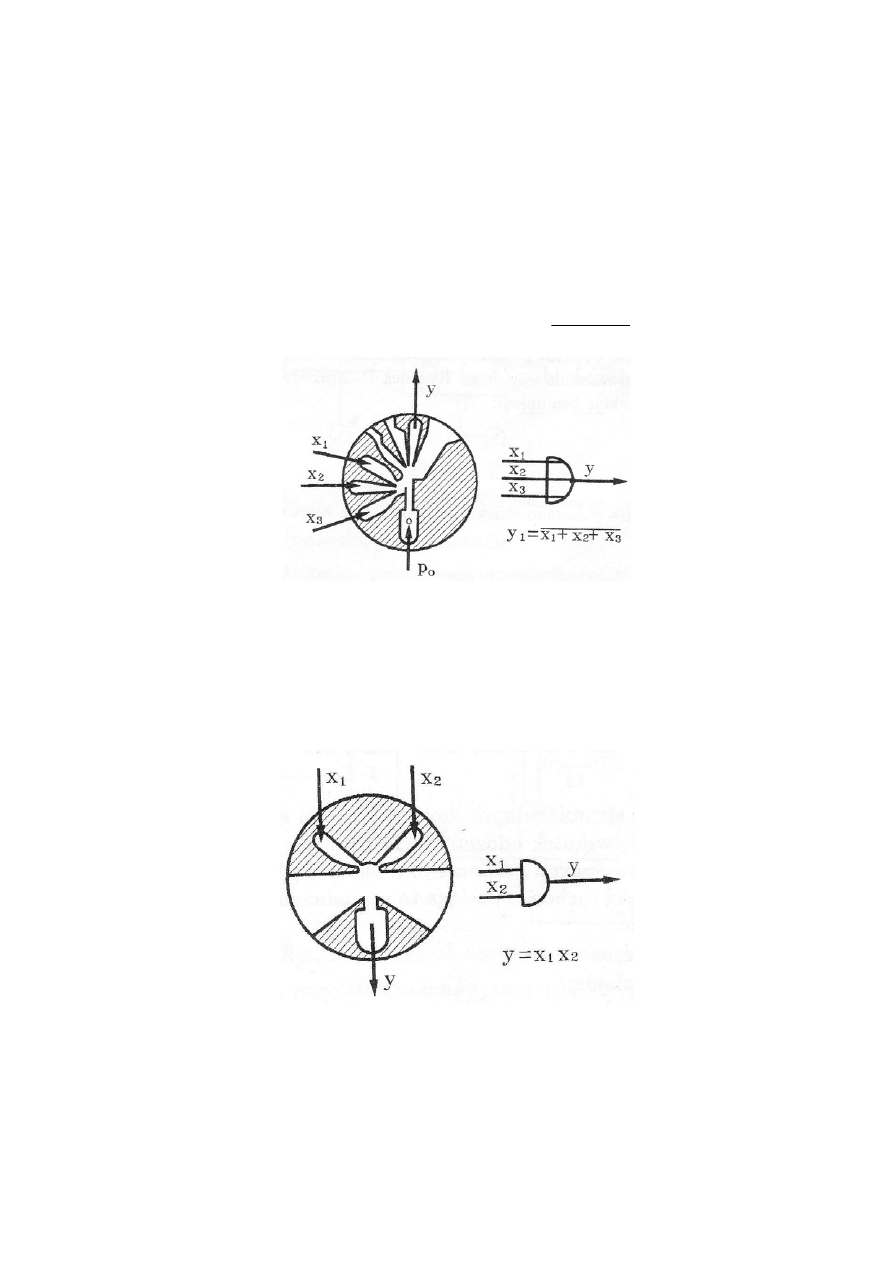
Do bardziej znanych strumieniowych elementów logicznych systemu: SPAS należą:
element NIE - lub (NOR) oraz element koniunkcji I (AND).
5.1 Element negacji alternatywy - NOR
(rys. 5.1)
Element negacji alternatywy - NOR realizuje funkcję
:
3
2
1
x
x
x
y
+
+
=
Rysunek 5.5 Element NOR (negacji alternatywy)
Jest stosowany w układach kombinacyjnych i sekwencyjnych. Posiada prostą mechaniczną
konstrukcję. Składa się z płyty głównej : pokrywy. W płycie głównej znajdują się trzy
kanały wejściowe, kanał zasilający, kanał wyjściowy i kanały odpowietrzające. W
pokrywie znajdują się wyprowadzenia wejściowe.
5.2 Element koniunkcji AND
(rys.5.2)
Element koniunkcji AND realizuje funkcję: y = x
1
.
x
2
Rysunek 5.6 Element AND (koniunkcji)
5.3 Podział układów logicznych
Układy sterowania składają się z trzech funkcjonalnych części :
czujniki, dzięki którym uzyskuje się informację o stanie urządzeń i procesu w
postaci binarnej,
24
Podstawy automatyki - laboratorium
część logiczna, zwana również urządzeniem sterującym, przetwarza informację z
czujników na sygnały sterujące dla elementów wykonawczych według określonej
funkcji logicznej
elementy wykonawcze, sygnalizacyjne i wzmacniające oraz oddziałujące na
obiekt przez włączanie i wyłączanie urządzeń.
Układy logiczne stosowane w urządzeniu sterującym można podzielić na
kombinacyjne
i
sekwencyjne
w zależności od struktury. Najprostszymi układami logicznymi
kombinacyjnymi są bramki logiczne (funktory) i sumatory. Podstawowymi układami
sekwencyjnymi są przerzutniki. Przy opisie tych układów korzystamy z algebry logiki
zwanej też algebrą Boole’a
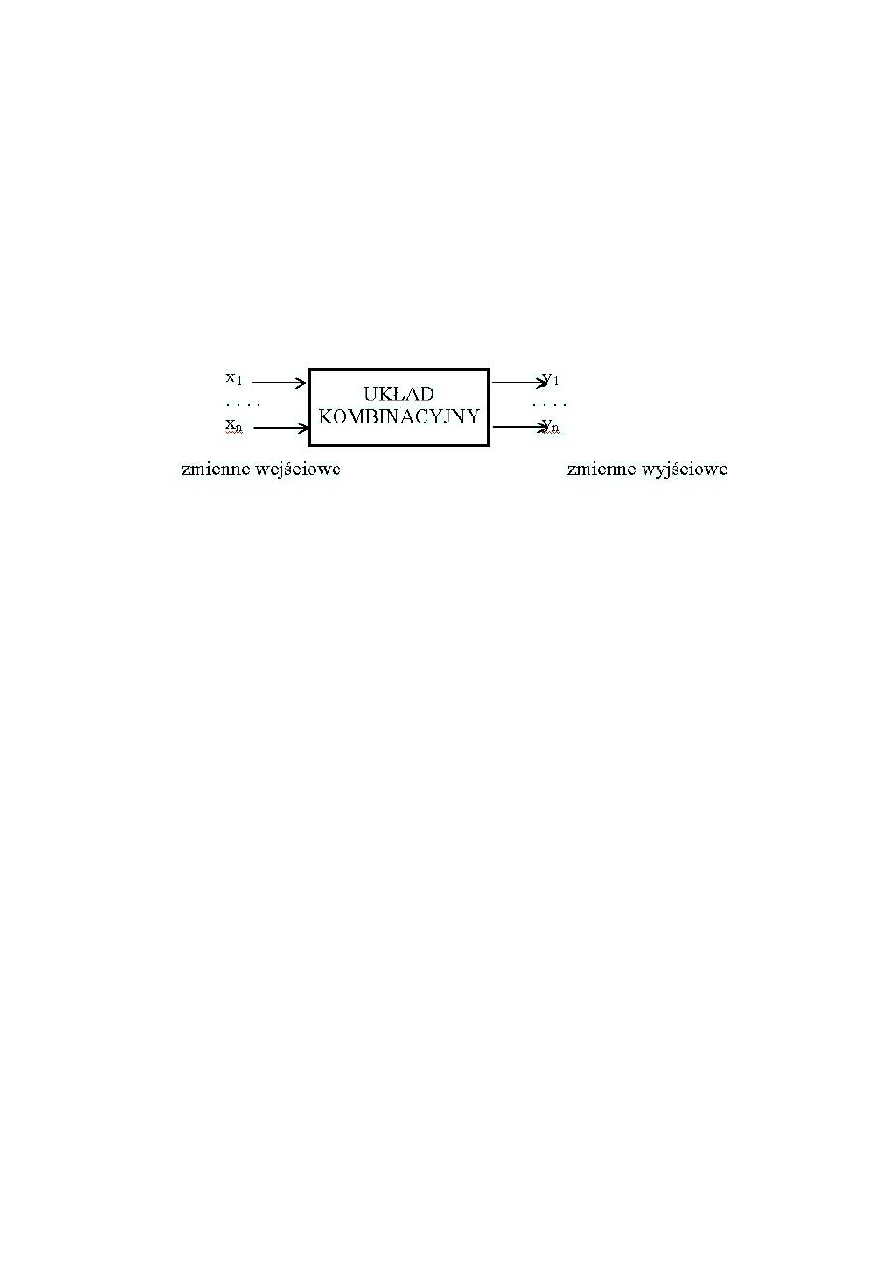
Układy kombinacyjne to takie, w których wartości wyjścia zależą jednoznacznie od
aktualnego stanu wejść. Oznacza to, że stany wyjść są w pełni określone stanem wejść.
Rys. 5.3 Schemat układu kombinacyjnego
Układy sekwencyjne to rodzaj układów logicznych, w których wartości sygnałów
wyjściowych zależą od wartości aktualnych sygnałów wejściowych i poprzedniego stanu
układu. W układach sekwencyjnych występuje co najmniej jeden taki stan wejść
(nazywany nieoznaczonym), któremu odpowiadają różne stany wyjść. Przyczyną tego jest
zależność wyjścia nie tylko od wejść, lecz również od wewnętrznego stanu układu Q. Stan
ten podaje informację o historii układu i w każdej chwili t jest w pełni określony
aktualnym stanem wejść oraz poprzednim stanem układu Q
t-1
. Poprzedni stan układu Q
t-1
to stan, jaki występował przed ostatnią zmianą stanu wejść.
(
)
Q
f Q
x
t
=
−
1
1
,
Funkcja f
1
jest sekwencyjną funkcją wejść i wewnętrznego stanu układu.
Układy sekwencyjne można podzielić na układy
synchroniczne i asynchroniczne
. Układ
jest synchroniczny, gdy zmiana stanu układu może następować jedynie w ściśle
określonych chwilach czasu. Są one zazwyczaj określone przez narastające zbocze
prostokątnego sygnału taktującego. W układach asynchronicznych zmiana stanu układu
może następować w dowolnej chwili.
5.4 Funkcje
logiczne
Funkcjami logicznymi nazywa się funkcje, których zarówno argumenty (funkcje
wejściowe) jak i wartości (zmienne wyjściowe) należą do zbioru dwuelementowego: {0,
1}. Elementy te oznaczamy umownie jako: 0 (zero) i 1 (jeden).
Funkcje logiczne definiuje się poprzez podanie tabeli wartości funkcji dla wszystkich
możliwych stanów na wejściach. Jeżeli funkcja jest n - argumentowa (n zmiennych na
wejściu), to wszystkich możliwych stanów na wejściu jest 2
n
. Np. dla funkcji
dwuargumentowej należy podać cztery (2
2
) wartości funkcji.
Ponieważ funkcja może przyjmować tylko dwie wartości, to istnieje ograniczona
liczba różnych funkcji logicznych. Liczna różnych funkcji n-argumentowych wynosi :
.
2
2
n
25
Podstawy automatyki - laboratorium
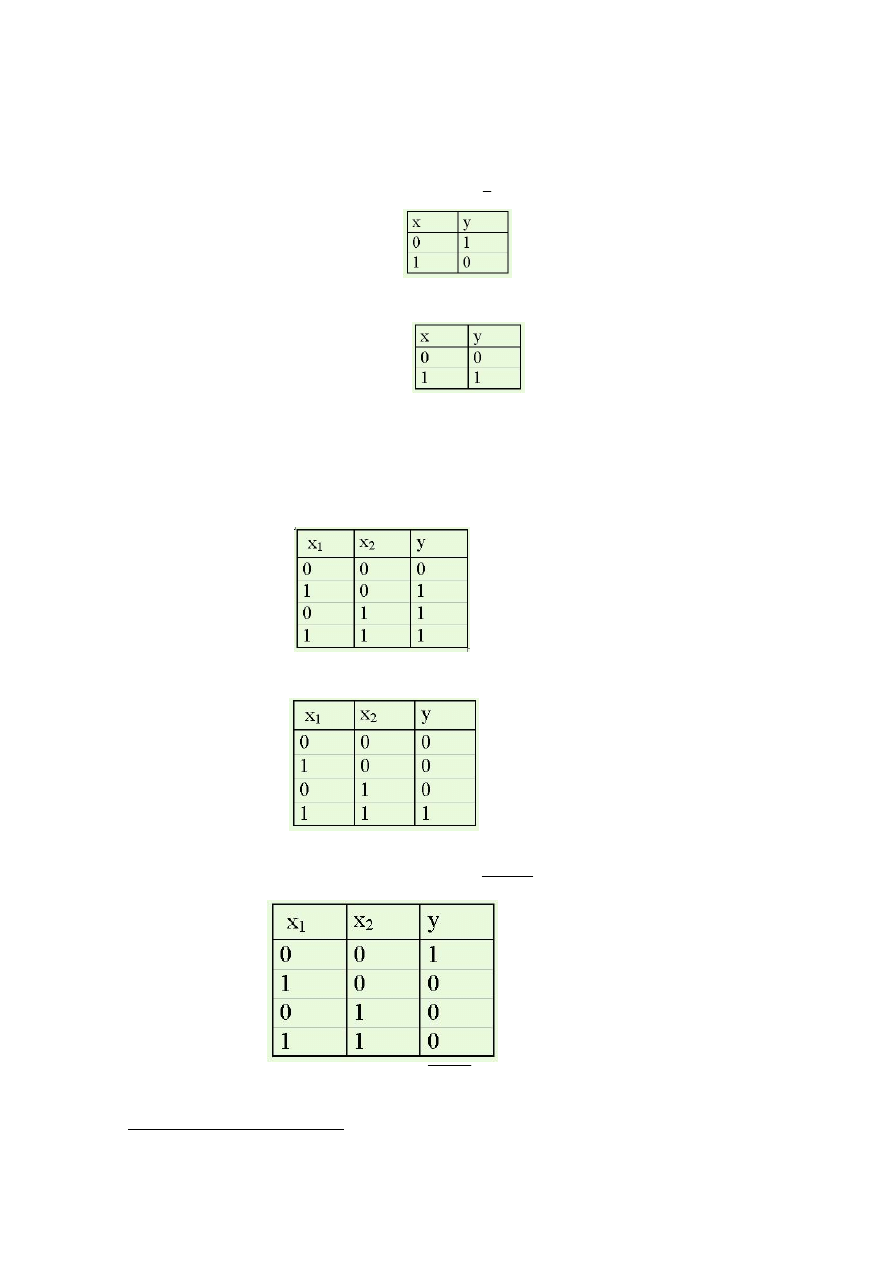
Funkcje jednoargumentowe.
Wszystkich funkcji jednoargumentowych jest cztery, z czego wykorzystuje się praktycznie
tylko jedną - negację.
Negacja NOT (NIE)
y x
=
Powtórzenie
y x
=
Funkcje dwuargumentowe
Wszystkich funkcji dwuargumentowych jest szesnaście
. Poniżej przedstawiono
jedynie te najczęściej stosowane.
2
2
2
Alternatywa OR (LUB)
y x
x
=
+
1
2
Koniunkcja AND (I)
y x x
=
⋅
1
2
Negacja alternatywy NOR (NIE LUB)
y x
x
=
+
1
2
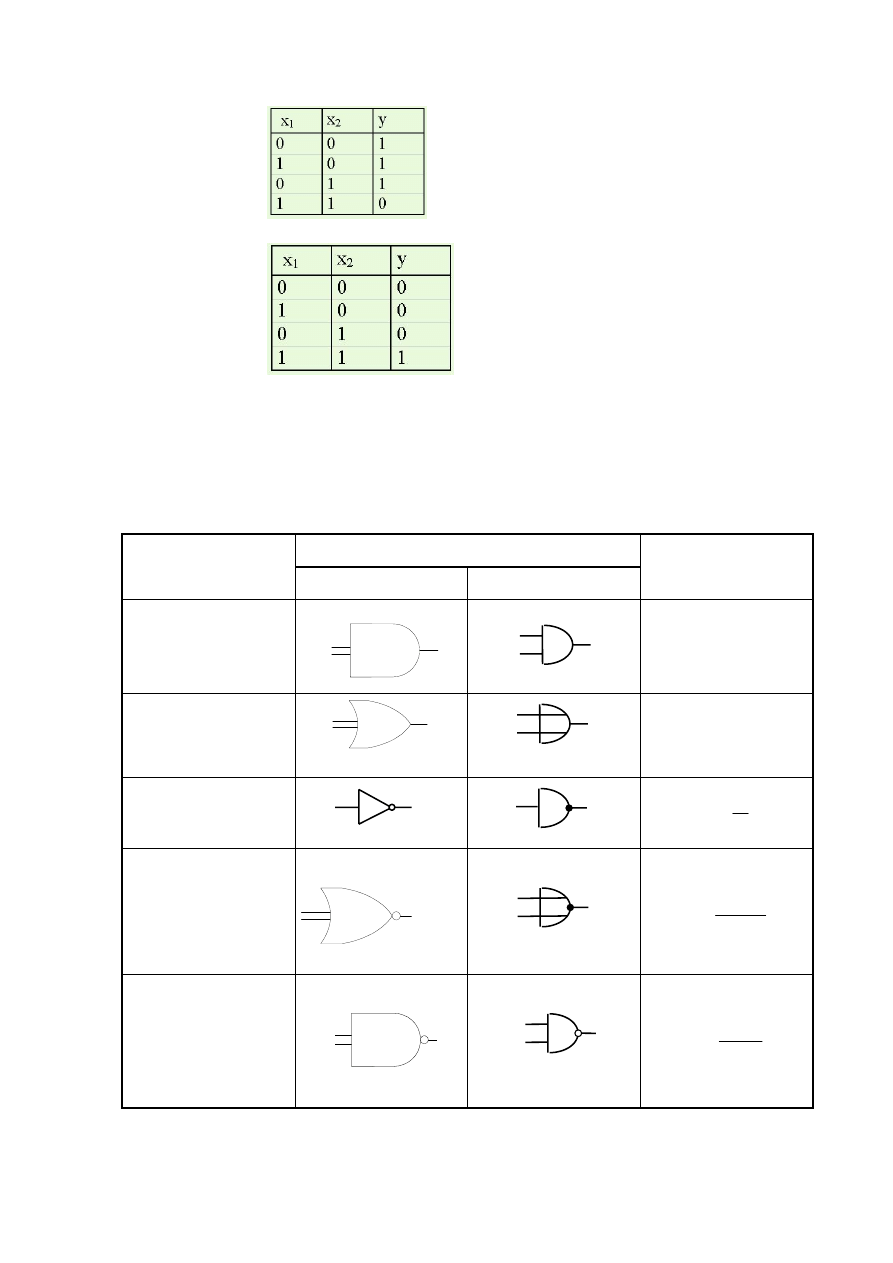
Negacja koniunkcji NAND (NIE I)
y x x
=
⋅
1
2
26
Podstawy automatyki - laboratorium
Alternatywa wykluczająca EXOR (exclusive or), (ALBO)
y x
x
=
⊕
1
2
Wśród funkcji logicznych można wyróżnić zestawy tzw. funkcji bazowych. dany
zestaw funkcji tworzy bazę, jeżeli dowolną funkcję logiczną można przedstawić jako
złożenie tych funkcji. Można wyróżnić trzy zestawy funkcji bazowych (tabela 5.1) :
- OR, AND, NOT;
-
NOR;
-
NAND.
Tabela 5.1. Oznaczenia kombinacyjnych układów logicznych.
UKŁAD
SYMBOL GRAFICZNY
FUNKCJA
Najczęściej spotykane Inne
Bramka iloczynowa
AND (I)
Koniunkcja
y = x
1
.
x
2
Bramka sumacyjna
OR (LUB)
OR
Alternatywa
y = x
1
+ x
2
Inwerter
NOT (NIE)
Negacja
y =
1
x
NOR
(NIE - LUB)
NOR
Negacja sumy
y =
2
1
x
+
x
NAND
(NIE - I)
Negacja iloczynu
y =
2
1
x
x
⋅
AND
y
x
1
x
2
y
x
1
x
2
y
x
1
x
2
x
1
x
2
y
y
x
1
y
x
1
y
x
1
x
2
x
1
x
2
y
y
x
1
x
2
x
1
x
2
y
27
Podstawy automatyki - laboratorium
Możliwość przedstawienia dowolnej funkcji za pomocą funkcji bazowych ma istotne
znaczenie jeżeli funkcje logiczne mają być wykonywane przez układy fizyczne. Można w
ten sposób zmniejszyć asortyment niezbędnych elementów, jeżeli jako bazę przyjmie się
funkcje NAND lub NOR. Działanie takie nazywamy faktoryzacją.
Podczas projektowania dąży się do tego, aby funkcja logiczna realizowana przez
urządzenie sterujące była zapisana w jak najprostszej postaci, tzn. zawierała jak najmniej
elementów. Takie działanie nazywamy minimalizacją.
Do przekształcanie funkcji logicznych z jednej postaci w drugą służy m.in. algebra
Boole’a.
5.5 Algebra
Boole’a
Algebrą Boole’a nazywa się algebrę abstrakcyjną, której przedmiotem jest zbiór
dwuelementowy : B = { 0, 1 } i trzy działania wewnętrzne w tym zbiorze, a mianowicie :
- działanie jednoargumentowe x ,
- dwa działania dwuargumentowe : +,
⋅ .
Dla dowolnych elementów x
1
, x
2
, x
3
ze zbioru B zachodzą :
1) prawa łączności - działania +,
⋅ są łączne :
(
)
(
x
x
x
x
x
x
1
2
3
1
2
3
+
+
=
+
+ )
)
1
1
3
)
(
)
(
x x
x
x
x
x
1
2
3
1
2
3
⋅
⋅
=
⋅
⋅
2) prawa przemienności - działania +,
⋅ są przemienne :
x
x
x
x
1
2
2
+
=
+
x x
x
x
1
2
2
⋅
=
⋅
3) prawa rozdzielności - działanie + jest rozdzielne względem
⋅ i na odwrót.
(
)
x
x
x
x x
x
x
1
2
3
1
3
2
+
⋅
=
⋅
+
⋅
x x
x
x
x
x
x
1
2
3
1
3
2
3
⋅
+
=
+
⋅
+
(
) (
4) działania na elementach 0, 1 - dla dowolnego
x
∈B
x x
+ = 1
x x
⋅ = 0
x
x
+ =
0
x
⋅ =
1 x
Z powyższych własności zwanych aksjomatami wynikają następne własności :
Prawa powtórzenia
x x x
+ =
x x x
⋅ =
(prawa te umożliwiają eliminowanie powtarzających się elementów lub dopisywanie
istniejących elementów w celu umożliwienia minimalizacji)
Prawa dopełnienia (prawa de Morgana)
x
x
x
x
1
2
2
+
=
⋅
1
x x
x
x
1
2
2
⋅
=
+
1
0
Działania na elementach 0 i 1
x
⋅ =
0
x
+ =
1 1
(działania te pozwalają na upraszczanie funkcji)
28
Podstawy automatyki - laboratorium
Reguły pochłaniania
x
x x
x
x
1
1
2
1
+
⋅
=
+
2
1
x
x x
x
1
1
2
+
⋅
=
Reguły sklejania
(
) (
)
x
x
x
x
x
1
2
1
2
+
⋅
+
=
1
x x
x x
x
1
2
1
2
⋅
+
⋅
=
1
Reguły te można udowodnić metodą przekształceń formalnych. Na przykład pierwszą
regułę pochłaniania :
lewa strona x
x x
x
x
x
x
1
1
2
1
1
1
2
+
⋅
=
+
⋅
+
(
) (
)
- z prawa rozdzielności
koniunkcji
(
) (
)
x
x
x
x
x
x
1
1
1
2
1
+
⋅
+
=
+
2
- z praw : x x
+ = 1 i
.
x
x
⋅ =
1
(reguł pochłaniania i sklejania używa się w trakcie minimalizacji funkcji)
Działanie x interpretujemy jako negację, działanie + jako alternatywę, działanie
⋅ jako
koniunkcję.
5.6 Synteza
układu logicznego
Żądany sposób działania układu jest często podany w postaci opisu słownego. Na
tej podstawie buduje się tabelę działania, a następnie korzystając z jednej z postaci
kanonicznych można uzyskać zapis analityczny (funkcyjny). Następnie dokonuje się
minimalizacji funkcji, polegającej na doprowadzeniu postaci analitycznej do formy
zawierającej minimalną liczbę działań logicznych. Minimalizację można przeprowadzić
wykorzystując podstawowe prawa logiczne. Jeżeli funkcja ma być realizowana przez
sterownik mikroprocesorowy to ostatnim etapem jest napisanie programu, natomiast jeżeli
ma to być układ fizyczny to należy przeprowadzić jeszcze faktoryzację i narysować
schemat graficzny.
Każdą funkcję logiczną można przedstawić w postaci kanonicznej. Istnieją dwie
postacie kanoniczne : alternatywna (1) i koniunkcyjna (2).
(
)
f x x
f
x x
f
x x
f
x x
f
x x
1
2
1
2
1
2
1
2
1
2
11
1 0
0 1
0 0
,
( , )
( , )
( , )
( , )
=
⋅
⋅
+
⋅
⋅
+
⋅
⋅
+
⋅
⋅
(1)
(
)
(
) (
) (
)
(
)
f x x
f
x
x
f
x
x
f
x
x
f
x
x
1
2
1
2
1
2
1
2
1
2
11
1 0
0 1
0 0
,
( , )
( , )
( , )
( , )
=
+ +
⋅
+ +
⋅
+ +
⋅
+ +
(2)
gdzie
- wartość przedstawianej funkcji dla stanu wejść 0,1.
f ( , )
0 1
Po wpisaniu na podstawie tabeli wartości funkcji 0 lub 1 w
miejsce
,
,
,
, zastosowaniu działań na elementach 0 i 1 i
późniejszym uproszczeniu przy użyciu praw algebry Boole’a, uzyskuje się końcową postać
analityczną funkcji.
f ( , )
11 f ( , )
0 1 f ( , )
1 0 f ( , )
0 0
29
Podstawy automatyki - laboratorium
Przykład
x
1
x
2
y
0 0 1
1 0 0
0 1 0
1 1 1
Funkcja równoważność
opisana tabelą
y x
x
=
≡
1
2
może być zapisana w alternatywnej postaci kanonicznej :
y
x x
x x
x x
x
= ⋅
⋅
+ ⋅
⋅
+ ⋅
⋅
+ ⋅
⋅
1
0
0
1
1
2
1
2
1
2
1
2
x
y x x
x x
=
⋅
+
⋅
1
2
1
2
W postaci alternatywnej wykorzystuje się tylko te wiersze tabeli, w których wartości
funkcji są równe jeden.
Kanoniczna forma koniunkcyjna dla funkcji równoważności ma postać :
(
) (
) (
)
(
)
y
x
x
x
x
x
x
x
= + +
⋅ + +
⋅ + +
⋅ + +
1
0
0
1
1
2
1
2
1
2
1
2
x
Po wykorzystaniu praw : 1 + x = 1 oraz 0 + x = x otrzymuje się :
(
) (
)
y
x
x
x
x
=
+
⋅
+
1
2
1
2
W postaci koniunkcyjnej wykorzystuje się te wiersze tabeli, których wartości funkcji są
równe zero. Zasady negowania są odmienne niż w formie alternatywnej. Po usunięciu
nawiasów z ostatniej równości otrzymuje się :
y x x
x x
x
x
x
x
=
⋅
+
⋅
+
⋅
+
⋅
1
1
1
2
2
1
2
2
Ostatecznie dzięki : x x
⋅ = 0 oraz x + 0 = x
y x x
x x
=
⋅
+
⋅
1
2
1
2
Jak widać wynik nie zależy od postaci kanonicznej, z której się korzysta. Należy
zauważyć, że funkcję
przedstawiono za pomocą funkcji koniunkcji,
alternatywy i negacji. Jest to możliwe ponieważ stanowią bazę.
y x
x
=
≡
1
2
5.7 Minimalizacja funkcji logicznych
5.7.1
Metody minimalizacji formuł boolowskich
.
Funkcja boolowska może być w ogólnym przypadku przedstawiona za pomocą wielu
rożnych, mniej lub bardziej skomplikowanych formuł boolowskich.
Minimalizacja polega na wyznaczeniu dla danej funkcji tej formuły, która jest najprostsza.
Współczynnikiem skomplikowania Ws formuły booloskiej o postaci iloczynu (sumy)
nazywamy sumę liczby wyrażeń ( pojedynczych liter lub ich kombinacji )podlegających
mnożeniu i liczby wyrażeń podlegających dodawaniu.
5.7.2 Metody Quine'a McCluskey'a.
Odpowiedni algorytm wprowadzimy rozważając następujący przykład:
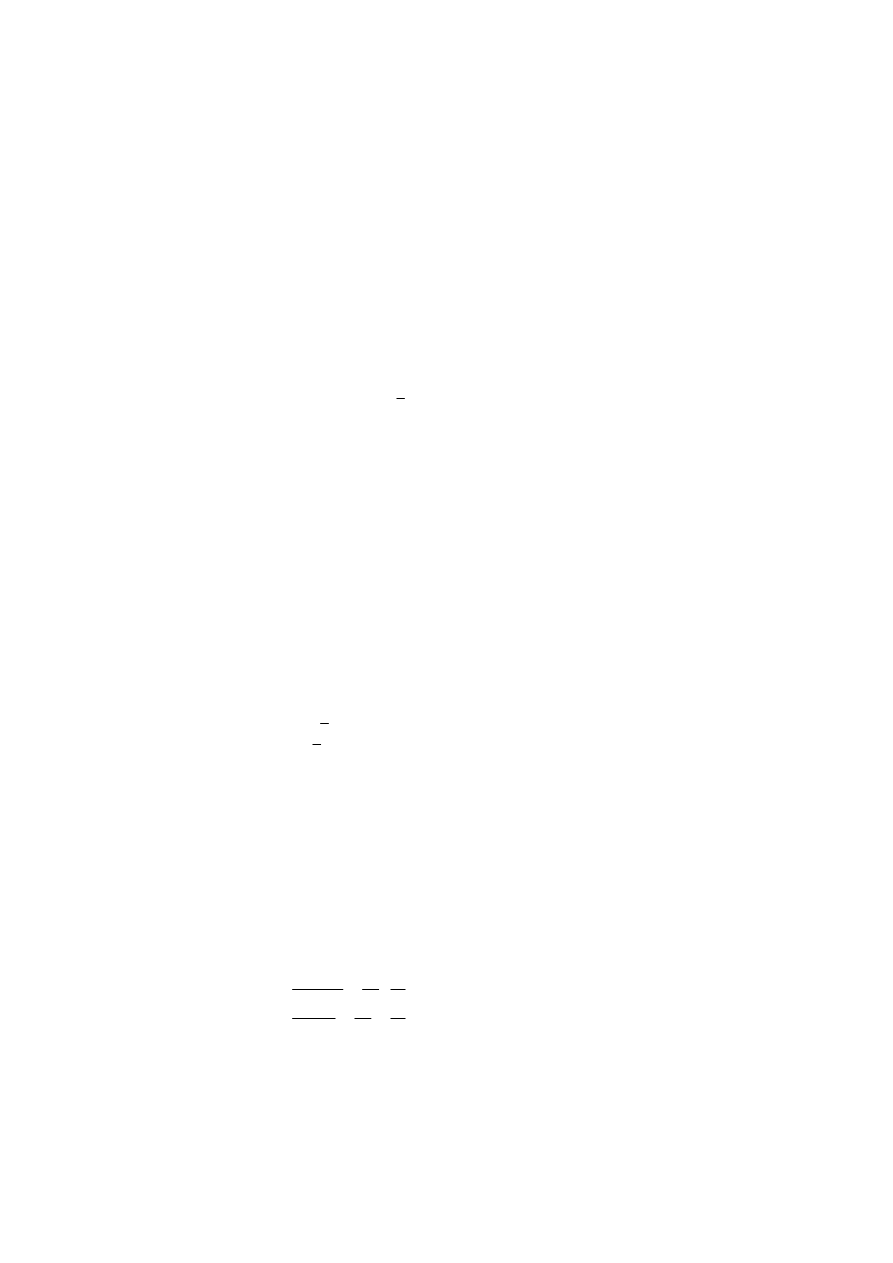
1.Wipisujemy kombinacje zer i jedynek odpowiadające kolejnym pełnym iloczynom.
Iloczynom tym przyporządkujemy indeksy według tabeli:
30
Podstawy automatyki - laboratorium
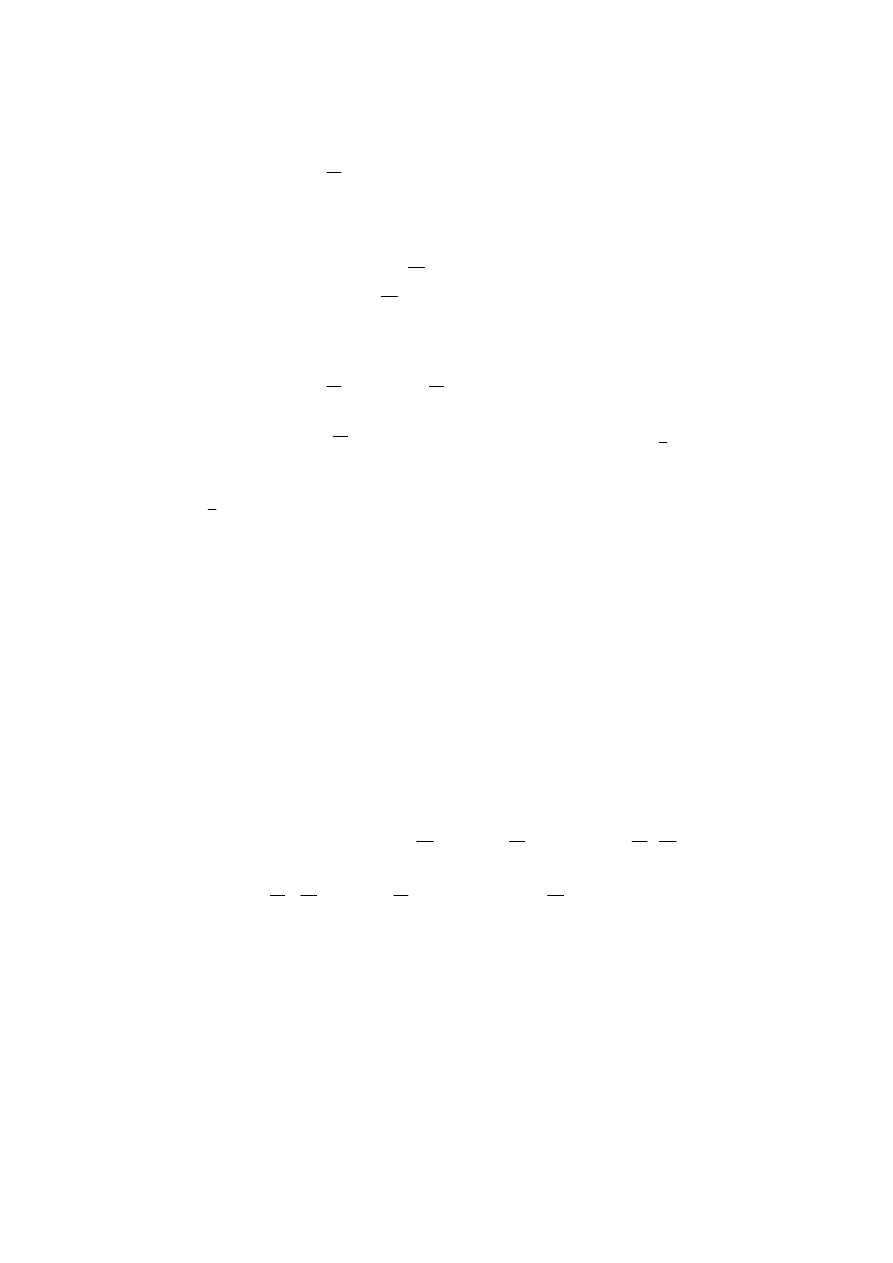
2.Szeregujemu te kombinacje według liczby jedynek. Otrzymujemy w ten sposób grupy
z n = 0,1,2... jedynek.
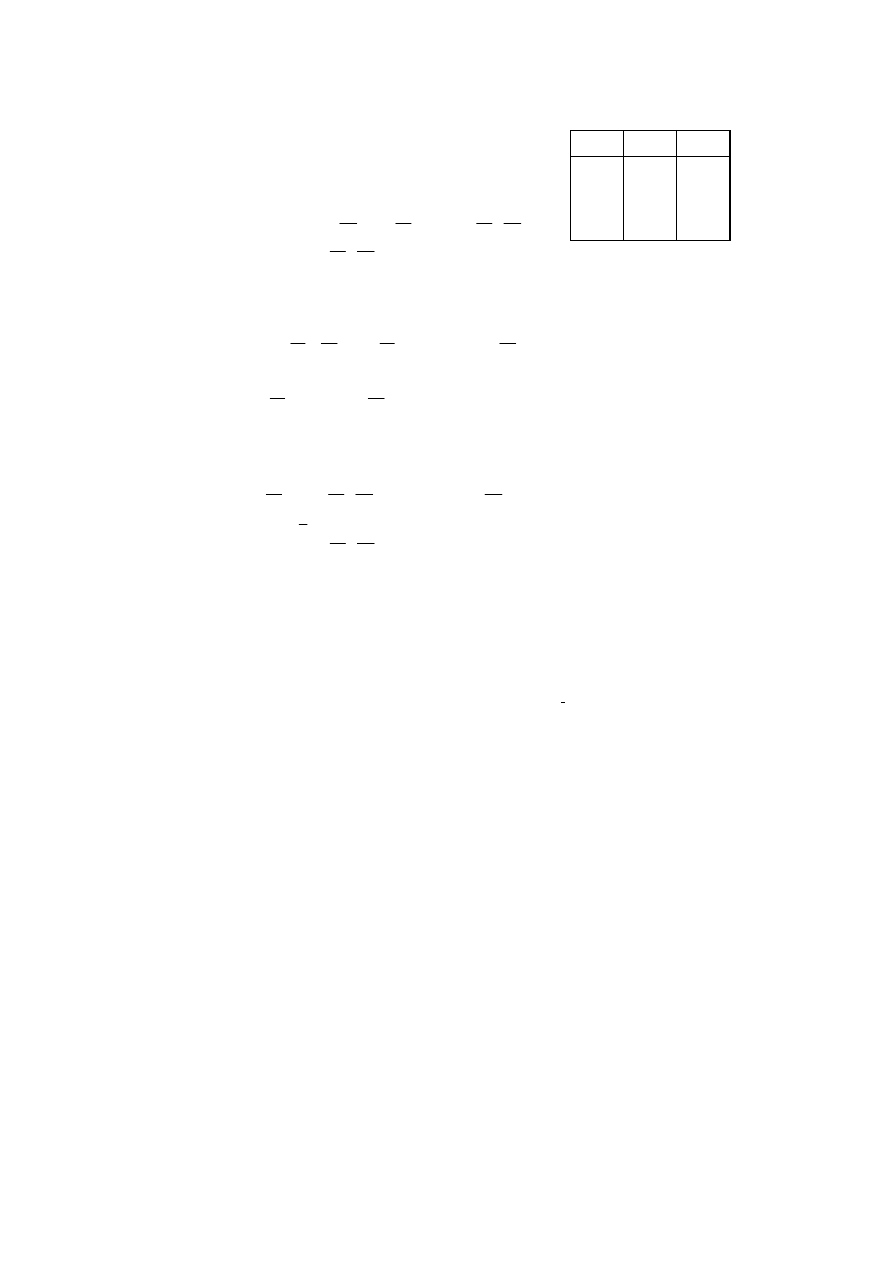
3.Porównujemy każdą kombinację należąca do i-tej grupy z każdą kombinację należącą
do grupę i+1.
Jeżeli różnią się tylko na jednej pozycji, to kombinacje te łączymy w jedną nową
kombinacje zastępując pozycje różniące się symbolem 0. Wykorzystujemy tu związek
XY+XY|=X.
Tworzymy nową tabelę.
31
Podstawy automatyki - laboratorium
A w tablicy poprzedniej oznaczamy znaczkiem "v" kombinacje wykorzystywane przy
dokonywaniu łączeń.
4.Kontynujemy procedurę usuwając kombinacje powtarzające się i łącząc kombinacje
różniące się na jednej pozycji.
5.Procedurę kończymy, gdy nie ma już możliwości dokonywania dalszych łączeń w
rozważanym przykładzie otrzymujemy ostatecznie
6.Trzorzyny zbór kombinacji nie mogących podlegać dalszemu łączeniu. Do zbioru tego
należą te kombinacje, które znalazły się w tablicy końcowej oraz te kombinacje, które nie
mogły być wykorzystane do dalszego łączenia ( bez znaków "v" w poprzednich
tablicach).
Do dalszej optymalizacji potrzebne nam będą następujące definicje:
Definicja 1
Formułę f nazywamy implikantem formuły F, gdy ( f -> F ) = 1
albo f| + F = 1.
Implikantami formuły kanonicznej sumy są więc wszystkie iloczyny pełne i wszystkie ich
połączenia typu ABC| + ABC = AB.
Definicje 2
Formułę f nazywamy pierwotnym implikantem formuły F oraz, gdy nie istnieje formuła
f** taka, że ( f* -> f** ) = 1 oraz
( f** -> F ) = 1.
Poszukiwana formuła minimalna F2 równoważna formule początkowej F1 może
być otrzymana w postaci sumy wyselekcjonowanych implikantów pierwotnych.
Selekcja przeprowadzana jest w taki sposób, aby wszystkie pełne iloczyny występujące w
formule F1 były reprezentowane w wybranych implikantach pierwotnych; liczba
wybranych implikantów powinna być jak najmniejsza. Jeżeli istnieje kilka takich
zestawów implikantów pierwotnych, wybieramy ten, w którym występuje najmniejsza
łączna liczba liter.
Zagadnienie selekcji wyjaśnię bliżej na naszym przykładzie.
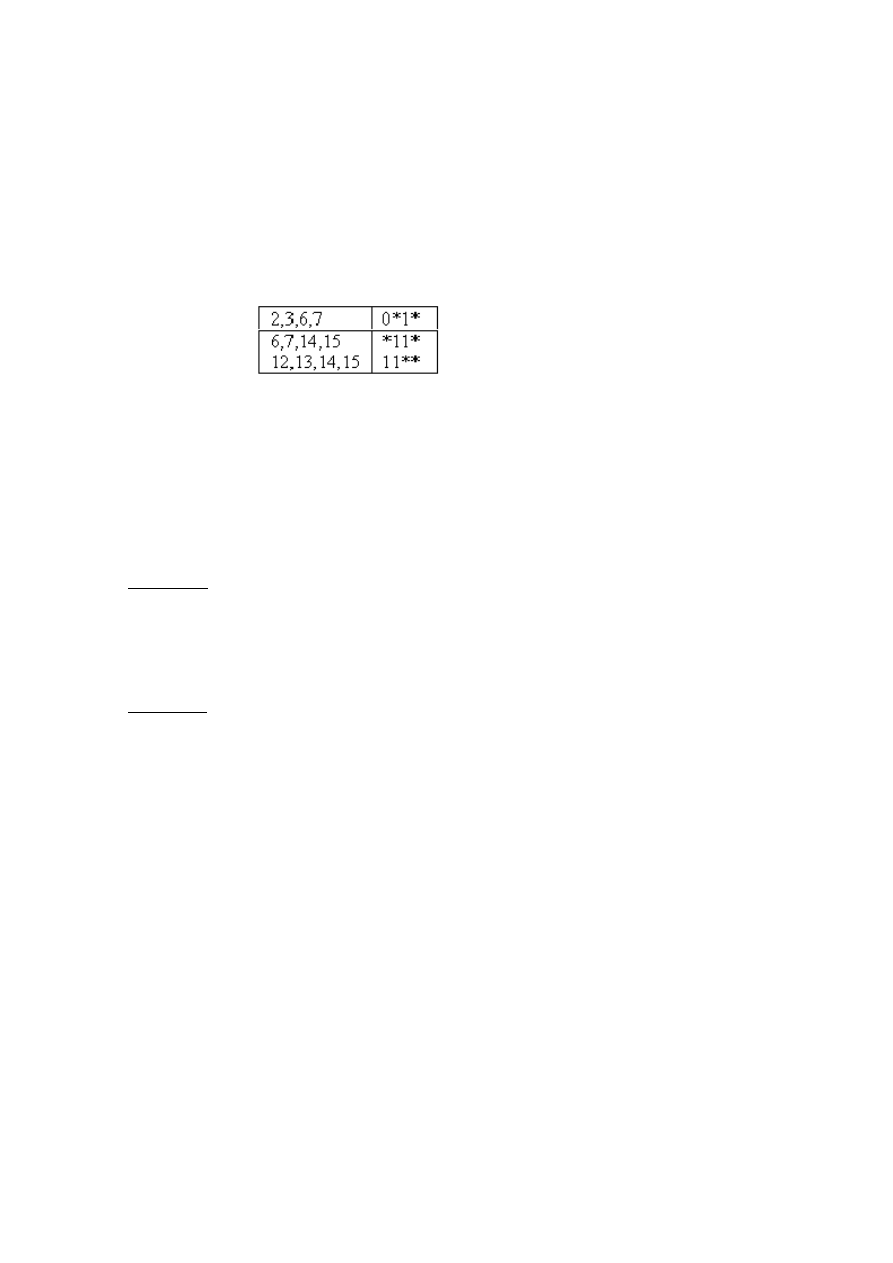
pierwotne implikanty rozważanej formuły możemy zapisać w sposób następujący:
A|C = f1 (2,3,6,7) BC = f2 (6,7,14,15)
Oznacza to, że na przykład implikant A|C powstał w wyniku kojarzenia pełnych iloczynów
o indeksach 2,3,6,7.
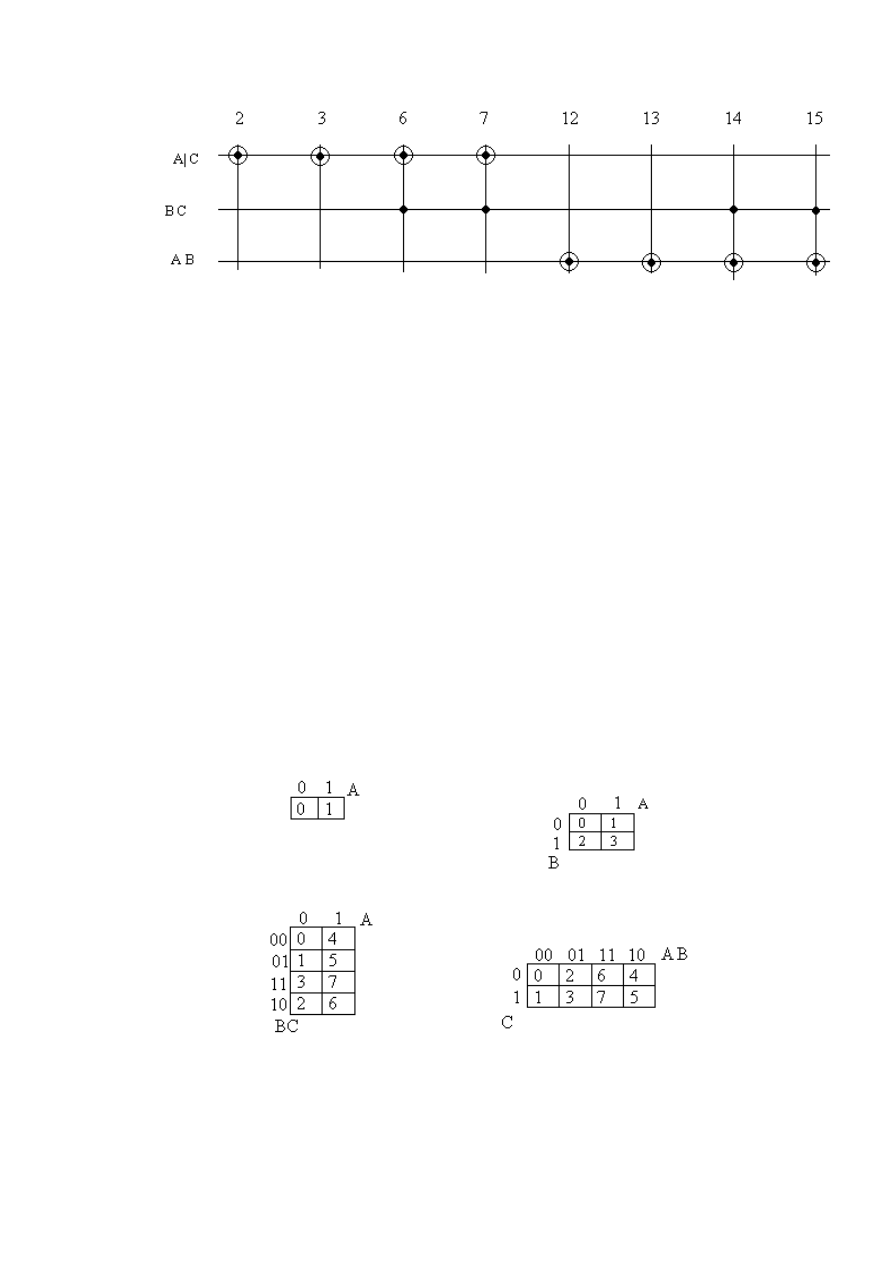
Selekcję przeprowadzamy korzystając z tablicy implikantów pierwotnych
32
Podstawy automatyki - laboratorium
Wybieramy taki zestaw implikantów, aby w każdej kolumnie występował co najmniej
jeden znaczek selekcyjny ( 0 ) i aby liczba wybranych implikantów była jak najmniejsza.
Rozwiązanie naszego przykładu to: F2 = A|C + AB
5.7.3 Metoda Veitcha - Karnaugha.
Metoda Veitcha - Karnaugha polega na zastosowaniu tzw. diagramów Veitcha lub tablic
Karnaugha. Każda kratka tablicy Karnaugha odpowiada kombinacji ( wektorowi )
zmiennych. Można więc powiedzieć, że kombinacja tych zmiennych tworzy adres kratki.
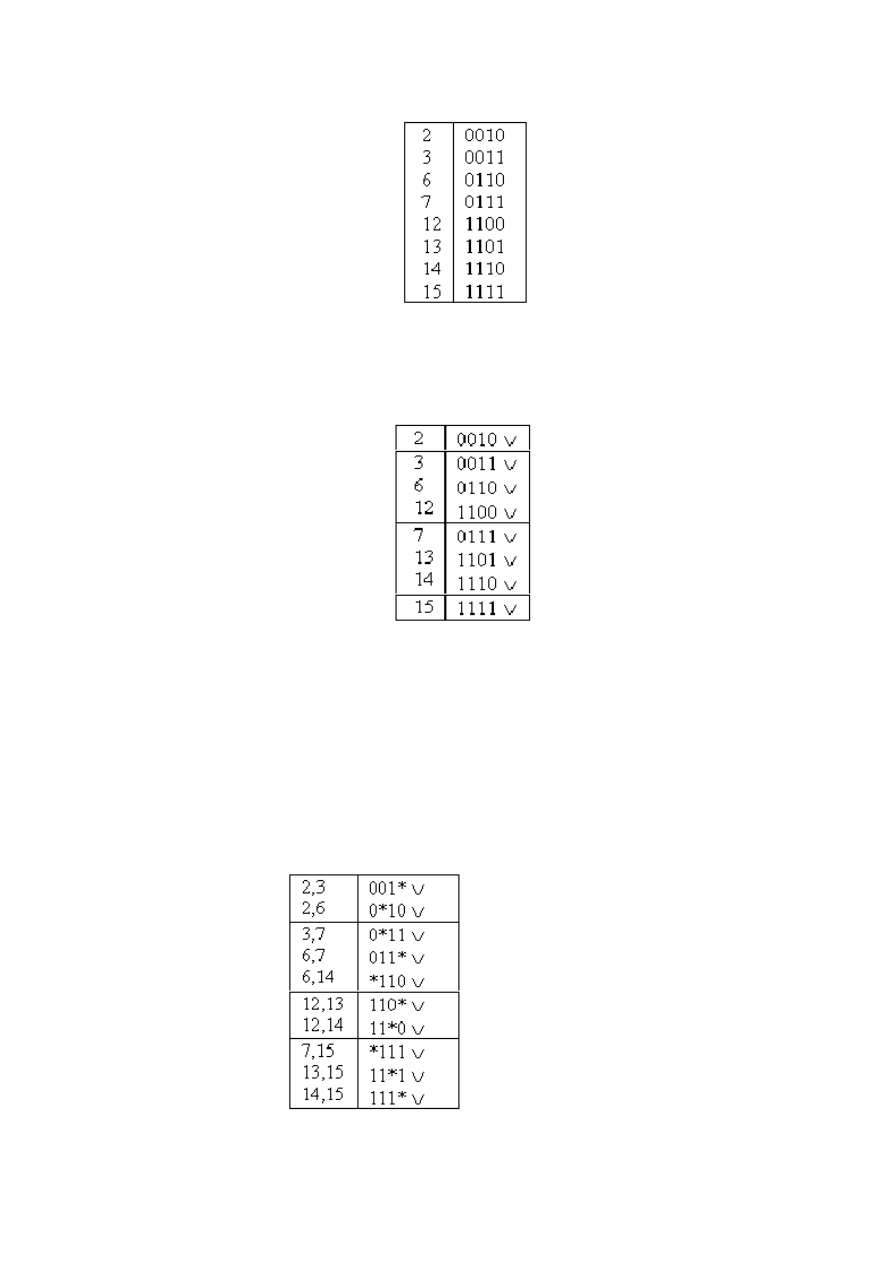
Kratki są ponumerowane przy czym numer jest liczba dziesiętną
odpowiadającą kombinacji zmiennych ( wektorowi zero - jedynkowemu ) traktowanej jako
liczba dwójkowa. W poszczególnych kratkach wpisane są - obok numerów - wartości
funkcji tj. 0 lub 1 przyjmowane przez funkcje dla tej kombinacji lub symbol "-" czy "x"
,jeżeli funkcja nie jest określona. Można też powiedzieć,
że kratka o numerze i-tym zawierająca 1 odpowiada iloczynowi pełnemu Pi w
kanonicznej postaci sumy dla danej funkcji. Natomiast kratka i numerze i-tym zawierająca
0 odpowiada sumie Si w kanonicznej postaci iloczynu.
Oto kilka tablic dla jednej, dwóch, trzech, czterech zmiennych
33
Podstawy automatyki - laboratorium
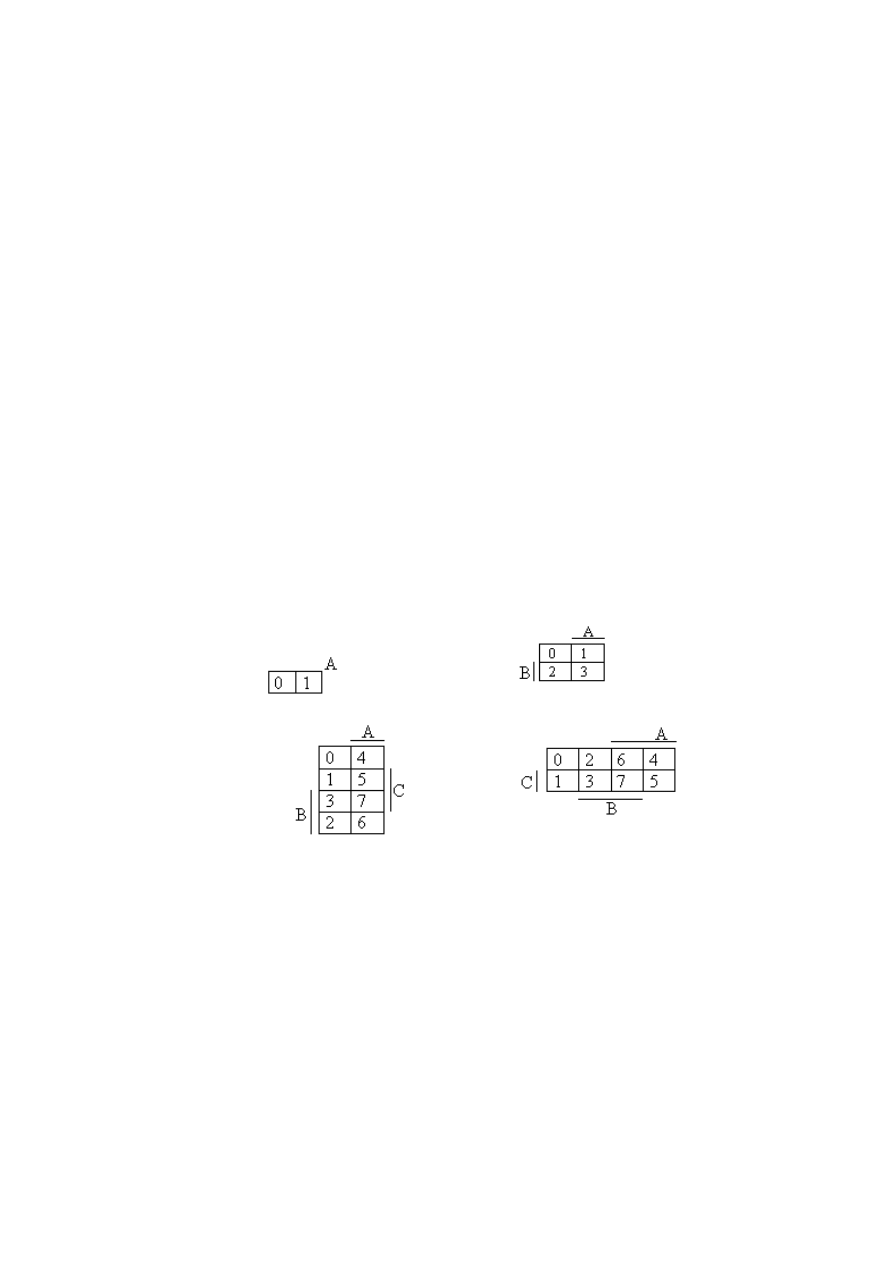
Diagram Veitcha jest tworem analogicznym do tablicy Karnaugha; różni się sposobem
opisu tablicy. Można powiedzieć, że tablica Karnaugha ma opis analityczny, a diagram
Veitcha ma opis rysunkowy.
Zasada tworzenia diagramu Veitcha jest następująca:
1 Sumie wszystkich pełnych iloczynów ( równiej jedności ) albo iloczynowi wszystkich
pełnych sum ( równej zeru ) odpowiada powierzchni całego kwadratu ( prostokąta ).
2 Każdej zmiennej odpowiada połowa kwadratu, druga połowa odpowiada taj zmiennej
zanegowanej, powierzchnie odpowiadające dwóm rożnych zmiennym nie mogą być
identyczne.
3 Każdemu iloczynowi Pi odpowiada kratka ( mały kwadrat ) stanowiąca wspólną
powierzchnie powierzchni odpowiadających zmiennym ( prostym lub zanegowanym )
występującym w tym iloczynie ; ta sama kratka odpowiada sumie Si.
Przykład:
X1X2X3| = P6 dla trzech zmiennych odpowiada kratka stanowiąca wspólną
część " połowy X1 ", "połowy X2 " i "połowy nie X3".
Ta sama kratka odpowiada pełnej sumie X1| + X2| + X3 = S6 ( oczywiście (S6 = P6|).
Inaczej sumie S6 odpowiada kratka stanowiąca wspólna częścią "połowy X1", "połowy
X2" i "połowy nie X3". Należy tu zwrócić uwagę na
odmienną konwencję przy
przyporządkowywaniu kratek odpowiadających pełnym sumom.
Oto diagramy Veitcha dla jednej, dwóch, trzech i czterech zmiennych:
Tablice Karnaugha i diagramy Veitcha mają następujące zastosowania:
- przedstawienie funkcji boolowskich
- wyznaczenie negacji
- sprowadzenie formuł boolowskich do postaci kanonicznej
- sprawdzanie tożsamości algebry Boole'a
- upraszczanie formuł boolowskich
- synteza funkcji boolowskich
Punktem wyjścia do minimalizacji jest najczęściej funkcja zadana tablicą prawdy, tablicą
Karnaugha lub w postaci zbiorów F1 i F0. Odpowiada to oczywiście kanonicznej postaci
34

Podstawy automatyki - laboratorium
sumy lub iloczynu. Jednak operowanie tymi wyrażeniami jest w praktyce nie wygodne,
zwłaszcza dla funkcji niezupełnych. Minimalizacja formuły boolowskiej przedstawionej w
postaci sumy iloczynów ( niekoniecznie pełnych ) za pomocą diagramu Veitcha sprowadza
się do następujących
czynności:
1.Przedstawienie formuły za pomocą diagramu Veitcha ( jeśli jest to potrzebne )
2.Wyznaczania pierwotnych implikantów przez sklejanie ze sobą możliwie jak
największych grup ( par, czwórek, ˘ósemek,... ) kratek zawierających jedynki
bądź też jedynki i krzyżyki według podanych reguł:
W diagramie dwóch, trzech, czterech zmiennych można:
sklejać pary kratek przylegających do siebie "wewnętrznie" lub "zewnętrznie"
sklejać kwadraty "wewnętrzne" lub "zewnętrzne"
sklejać pary wierszy lub kolumn przylegających do siebie "wewnętrznie" lub
"zewnętrznie"
W diagramie pięciu lub sześciu zmiennych można sklejać grupy kratek leżące
symetrycznie względem osi symetrii w dwóch częściach diagramu ( na przykład 5
zmiennych ), z których każda jest diagramem składowym ( na przykład dla 4 zmiennych ).
3.Wybrania niektórych grup z grup otrzymanych w punkcie 2 oraz pojedynczych kratek
(zawierający jedynki), które nie mogły być sklejane, zgodnie z następującymi zasadami:
a) każda jedynka musi być co najmniej raz reprezentowana w zbiorze wybranych
grup
b) liczba wybranych grup powinna być możliwie jak najmniejsza. Suma iloczynów
odpowiadających wybranym grupom stanowi formułę minimalną równoważną
formule pierwotnej
Punkt 3 powyższej procedury odpowiada drugiej części procedury Quina McCluskey'a.
W przypadku bardziej złożonym może być celowe przeprowadzenie pierwszej części
minimalizacji metodą Veitcha, a drugiej Quine'a przy użyciu tablicy implikantów
5.7.4 Najnowsze metody dokładnej minimalizacji.
Rudell i Sangovonni udoskonalili algorytm Quine - McCluskey'a i za zaimplementowali go
w programie ESPRESSO-EXACT. Wykazano, że program jest efektywny. Wykonywał on
dokładną minimalizacje 114 ze 134 wzorcowych funkcji za standartowego zbioru.
Program ESPRESSO_EXACT dzieli implikanty proste na trzy zbiory: istotny, częściowo
nadmiarowy oraz całkowicie nadmiarowy. Istotne implikanty mają takie same znaczenie
jak w innych
przypadkach. Całkowicie nadmiarowe to implikanty pokrywane przez implikanty istotne
oraz zbiór nieskończoności. Pozostałe implikanty proste należą do zbioru częściowo
nadmiarowych. Ostatni zbiór ma znaczenie tylko podczas wyznaczanie pokrycia.
Odpowiada on kolumnom zredukowanej tablicy implikantów.
Dagenais i inni zasugerowali inną metodę dokładnej minimalizacji, która jest oparta na
metodzie Quine'a - McCluskey'a, ale nie tworzy w sposób jawny tablicy implikantów
prostych.
Algorytm zaimplementowano i programie McBoole, który najpierw generuje implikanty
proste i przechowuje je w dwóch listach, nazywamy listami implikatorów ustalonych oraz
nieokreślonych. Przechowywanie implikatorów w listach jest bardziej efektywne od
przechowywania w tablicach. Następnie na podstawie własności implikatorów ( istotności
oraz dominowania ), niektóre implikatory są przenoszone do list ustalonych. Każdy
35

Podstawy automatyki - laboratorium
implikant z list nieokreślonych ma odpowiednią część niepokrytą tzn. nie pokrytą przez
implikatory z listy ustalonych. Minimalne pokrycie jest
znalezione wtedy, kiedy wszystkie części są pokryte. Wykazano, że program McBoole jest
skuteczny, jakkolwiek dokładnie zminimalizował tylko 84 za 134 funkcji standartowego
zbioru wzorcowego.
Caudert i Madre wymyślili sposób domyślny ( tzn. nie wymagający wyliczenia )
reprezentacji wszystkich implikantów prostych funkcji. Metoda wykorzystuje binarne
diagramy decyzyjne. Dzięki temu unika się wypisywania wszystkich implikatorów
prostych, których liczba w przypadku niektórych funkcji wzorcowych, może przekroczyć
bilion. Główny problem dokładnej minimalizacji polega na usuwaniu dominujących
implikantów
prostych w celu wyznaczenia cyklicznego rdzenia zagadnienia. Często tylko mała część
implikatorów prostych należy do cyklicznego rdzenia. Caudert zaproponował również
nową procedurę dokładnej minimalizacji, wykorzystującą przekształcenie problemu
pokrycia.
Dzięki temu przekształceniu złożoność obliczania algorytmu staje się niezależna od liczby
zarówno mintermów, jak i implikatorów prostych. Metoda ta umożliwia dokładną
minimalizacje wszystkich obecnie stosowanych przykładów wzorcowych.
Alternatywne podejście zostało zaproponowane przez McGeera i innych.
Zamiast obliczania wszystkich implikatorów prostych algorytm wyznacza w sposób
pośredni problem pokrycia. Następnie generuje tylko te implikatory, które są związane z
problemem pokrycia. Dzięki temu całkowicie unika się obliczania ( zarówno w
sposób jawny jak domyślny ) zbioru wszystkich implikatorów prostych, który może być
bardzo duży. Algorytm oparty jest na idei kostek charakterystycznych, określający zbiór
implikatorów prostych. Mianowicie kostka charakterystyczna jednocześnie
określa zbiór implikatorów prostych. Zbiór największych kostek charakterystycznych tzn.
takich że żadna z nich nie zawiera się w innej, określa minimalne pokrycie kanoniczne
minimalizowanej funkcji i w sposób pośredni reprezentuje tablicę implikatorów
prostych. Minimalne pokrycie kanoniczne funkcji jest jednoznaczne i nienadmiarowe.
Dokładna minimalizacja polega wówczas na wyznaczeniu minimalnego pokrycia
kanonicznego, obliczeniu implikatorów prostych związanych z każdą kostką
charakterystyczną oraz rozwiązanie odpowiedniego problemu pokrycia.
5.7.5 Heurystyczna minimalizacja funkcji logicznych.
Minimalizacja heurystyczna jest stosowana ze względu na potrzebę redukowania wyrażeń
dwupoziomowych w ograniczonym czasie i przy ograniczonych zasobach pamięci.
W heurystycznych programach minimalizacyjnych funkcje logiczne stosuje się strategię
iteracyjnego poprawiania.
Heurystyczną minimalizacje funkcji logicznych można traktować jak wykonywanie na
pokryciu operacji należących do pewnego zbioru. Początkowe pokrycie wyznaczane jest
na podstawie zbioru nieokreśloności. Decyzje o zakończeniu minimalizacji podejmuje się
wtedy, kiedy żadna operacja ze zbioru nie może zmniejszyć wielkości pokrycia.
Oto operacje stosowane najczęściej w heurystycznej minimalizacji:
* Rozwijanie. W wyniku tej operacji otrzymuje się pokrycie proste i minimalne ze
względu na zawieranie pojedynczych implikatorów. Implikatory te są przetwarzane
pojedynczo. Każdy implikant który nie jest prosty jest rozwijany do postaci prostej tzn. jest
zastępowany zawierającym go implikatorem prostym; następnie usuwa się wszystkie
implikanty pokrywane przez rozwinięty implikant.
36
Podstawy automatyki - laboratorium
* Redukowanie polega na przekształcaniu pokrycia do postaci, która nie jest prosta przy
jednoczesnym zachowaniu jego mocy. Implikatory są przetwarzane pojedynczo; podczas
wykonywania tej operacji próbuje się zastąpić każdy implikant innym, zawierającym się w
nim. Zamiana może być wykonywana pod warunkiem, że zredukowane implikanty razem
z pozostałymi nadal pokrywają funkcję.
* Profilowanie polega na modyfikowaniu pokrycia bez zmieniania jego mocy. Implikatory
są przetwarzane parami. Jeden implikant jest rozwijany, drugi natomiast redukowany,
pod warunkiem że przekształcone implikanty razem z pozostałymi nadal pokrywają
funkcje.
* Usuwanie nadmiarowości. W wyniku tej operacji otrzymuje się nie nadmiarowe. Polega
ono na wybraniu minimalnego podzbioru implikantów, takiego że żaden implikant nie jest
pokrywany przez pozostałe.
opracowa
ł
mgr in
ż
. Grzegorz Maniarski
37

Podstawy automatyki - laboratorium
Ć
Ć
w
w
i
i
c
c
z
z
e
e
n
n
i
i
e
e
6
6
:
:
P
P
o
o
m
m
i
i
a
a
r
r
o
o
p
p
o
o
r
r
ó
ó
w
w
p
p
n
n
e
e
u
u
m
m
a
a
t
t
y
y
c
c
z
z
n
n
y
y
c
c
h
h
.
.
6 Charakterystyki
przepływowe oporów pneumatycznych
Przez
pojęcie oporu pneumatycznego należy rozumieć przewężenie kanału
przepływowego, wykonane w celu dławienia przepływu powietrza. Opory pneumatyczne
stosowane są w tych przyrządach automatyki, które pracują na zasadzie dławienia
przepływu powietrza, np. w regulatorach, przetwornikach, wzmacniaczach.
Celem ćwiczenia jest:
- zapoznanie
się z zasadą pracy oraz cechami konstrukcyjnymi oporów pneumatycznych,
- wyznaczenie charakterystyki przepływowej oporu stałego,
- wyznaczenie charakterystyki przepływowej oporu nastawnego,
- zapoznanie się z analityczno-doświadczalną metodą wyznaczania charakterystyk
przepływowych oporów pneumatycznych.
6.1 Rodzaje oporów pneumatycznych
Ze względu na charakter przepływu opory pneumatyczne dzieli się na laminarne i
turbulentne. Zmiana (lub utrzymanie stałej wartości) oporności tych oporów, zależnie od
stawianych wymagań, może być realizowana poprzez stosowanie różnych rozwiązań
konstrukcyjnych.
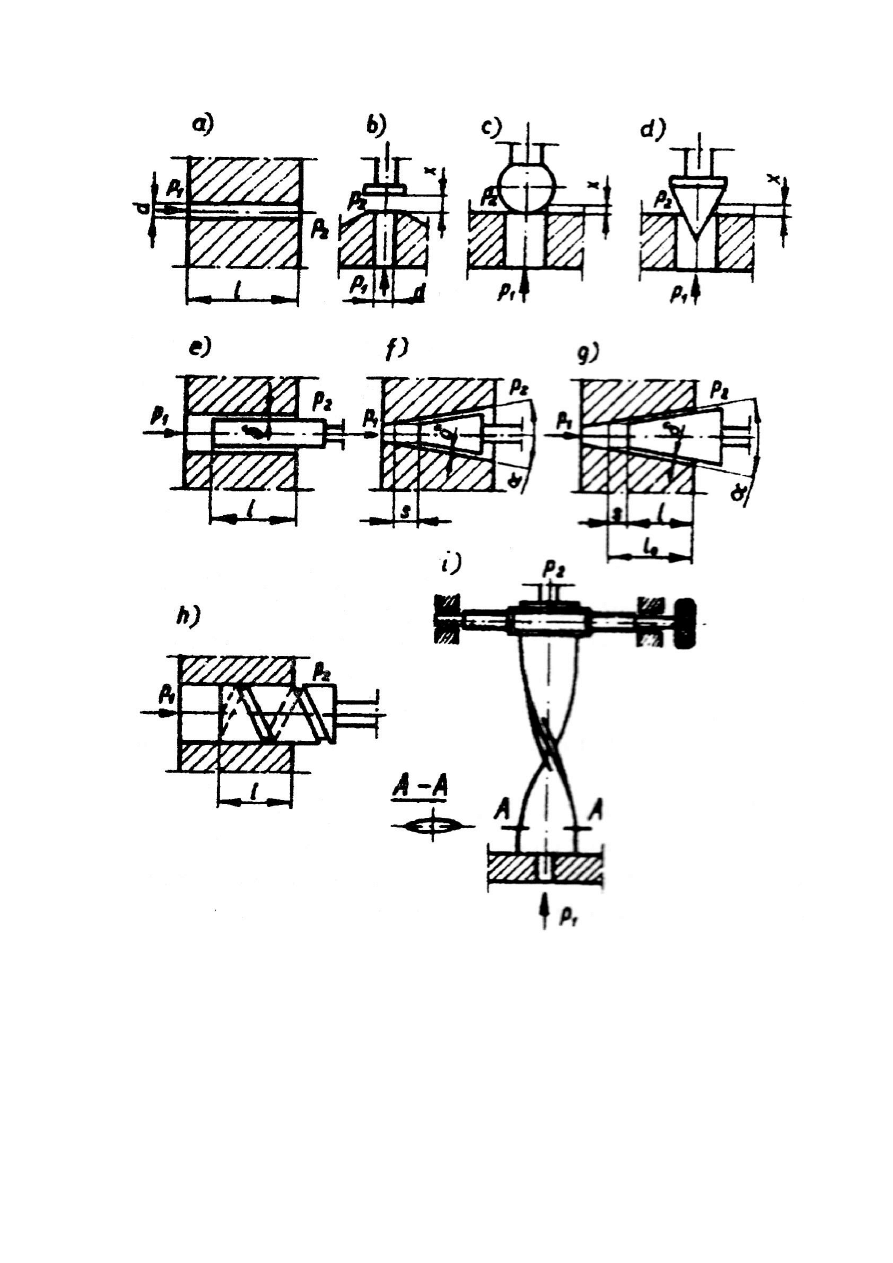
Ogólnie rozróżnia się opory:
- stałe (rys. 6.1 a),
- zmienne (rys.6.1 b,c,d),
- nastawiane (rys. 6.1 e,f,g,h,i).
Opory stałe charakteryzuje stała długość (l) i przekrój przepływu (średnica d).
Wykonywane są jako kapilary (d = 0,15
÷0,8 mm, l = 5 ÷ 60 mm) i zwężki. Opory te z
uwagi na małe przekroje przepływu są wrażliwe na zanieczyszczenia. Oporem zmiennym
nazywa się taki opór, w którym zmiana przekroju przepływu (dławienia) następuje dzięki
zmianie położenia przysłony względem dyszy, tzn. że przekrój F jest funkcją położenia (x)
elementu dławiącego. Spośród przedstawionych na rysunku oporów zmiennych,
największe zastosowanie znalazł opór typu dysza-przysłona.
Do podstawowych cech eksploatacyjnych tego oporu można zaliczyć:
- dużą niezawodność,
- możliwość dużej zmiany oporności przy niewielkich (rzędu kilkunastu mikrometrów)
przesunięciach przysłony,
- ograniczony zakres pracy z uwagi na nieliniowość charakterystyki statycznej,
- oddziaływanie na przysłonę strumienia powietrza wypływającego z dyszy.
Opory nastawiane, jak sama nazwa wskazuje, stosuje się tam, gdzie zachodzi
konieczność zmiany dławienia. Konstrukcja tych oporów musi zatem umożliwiać zmianę
wymiaru kanału dławiącego (przekroju, długości bądź przekroju i długości). O jakości
oporu nastawnego decyduje przede wszystkim powtarzalność i stałość nastaw.
38
Podstawy automatyki - laboratorium
Rys. 6.1. Schematy oporów pneumatycznych (a) - opór stały; (b,c,d ) - opory zmienne; (e, f, g) opory
nastawiane szczelinowe; (h) opór nastawiany o zmiennej długości; (i) opór nastawiany o zmiennym
przekroju
6.2
Charakterystyka przepływowa oporów pneumatycznych
Natężenie przepływu powietrza przez opór jest funkcją wielu zmiennych:
Q = f( p
1
, p
2
, F, l, p,
Θ)
gdzie:
p
l
, p
2
- ciśnienie przed i za oporem,
39
Podstawy automatyki - laboratorium
F - przekrój przepływu,
1 - długość oporu,
p - gęstość powietrza,
Θ - temperatura powietrza.
Natężenie przepływu wyznaczone z twierdzenia Bernoulliego, przy pominięciu wpływu
zmian położenia i uwzględnieniu strat przepływu, wynosi:
(
)
2
2
2
1
1
1
1
p
p
R
g
F
Q
−
⋅
Θ
⋅
⋅
⋅
+
=
ξ
;
przy czym:
2
1
λ
λ
λ
ξ
+
=
t
d
l
+
- współczynnik strat przepływu,
1
λ - współczynnik strat miejscowych na wlocie (z wykresów),
t
λ - współczynnik strat tarcia w kanale (zależy od warunków przepływu),
- dla przepływu laminarnego
e
t
R
64
=
λ
dla kołowego przekroju kanału
e
t
R
9
,
56
=
λ
- dla kwadratowego przekroju kanału,
4
316
,
0
e
t
R
=
λ
- dla przepływów turbulentnych 0,316
ν
d
e
⋅
w
R
=
- liczba Reynoldsa
2
λ - współczynnik strat miejscowych na wylocie (jeżeli zachodzi pełna strata prędkości -
równa się 1),
R - stała gazowa powietrza,
Θ
1
- temperatura powietrza przed oporem.
Przepływ laminarny w przewodzie o przekroju kołowym podlega prawu Hagena-
Poisseuille’a.
Prawo to wyraża się następującym wzorem:
(
)
2
1
4
128
p
p
l
d
Q
śr
−
⋅
⋅
⋅
=
µ
γ
π
gdzie:
d - średnica,
śr
γ - średnia wartość ciężaru właściwego powietrza,
µ - dynamiczny współczynnik lepkości.
Do obliczania natężenia przepływu w oporach pneumatycznych krótkich (zwężki, dysze),
w których tarcie w kanale jest nieznaczne, stosuje się następujące wzory:
(
)
2
1
2
p
p
g
F
Q
−
⋅
⋅
=
γ
α
40
Podstawy automatyki - laboratorium
−
−
⋅
=
+
κ
κ
κ
γ
κ
κ
α
1
1
2
2
1
2
1
1
1
2
p
p
p
p
p
g
F
Q
gdzie:
α - współczynnik przepływu (wyznacza się doświadczalnie),
κ - wykładnik politropy,
γ- ciężar właściwy, g = 9,81 m/s
2
.
Analizując przedstawione wzory łatwo jest zauważyć, że natężenie przepływu jest
proporcjonalne albo do pierwiastka kwadratowego z różnicy ciśnień, albo - w przypadku
przepływu laminarnego - do różnicy ciśnień. Poza tym we wzorach tych występuje
współczynnik strat bądź współczynnik przepływu, ciężar właściwy, który zmienia się wraz
z temperaturą i zależy od miejsca (inny jest przed oporem, inny za oporem). Tak więc opór
pneumatyczny jest elementem automatyki o kilku sygnałach wejściowych.
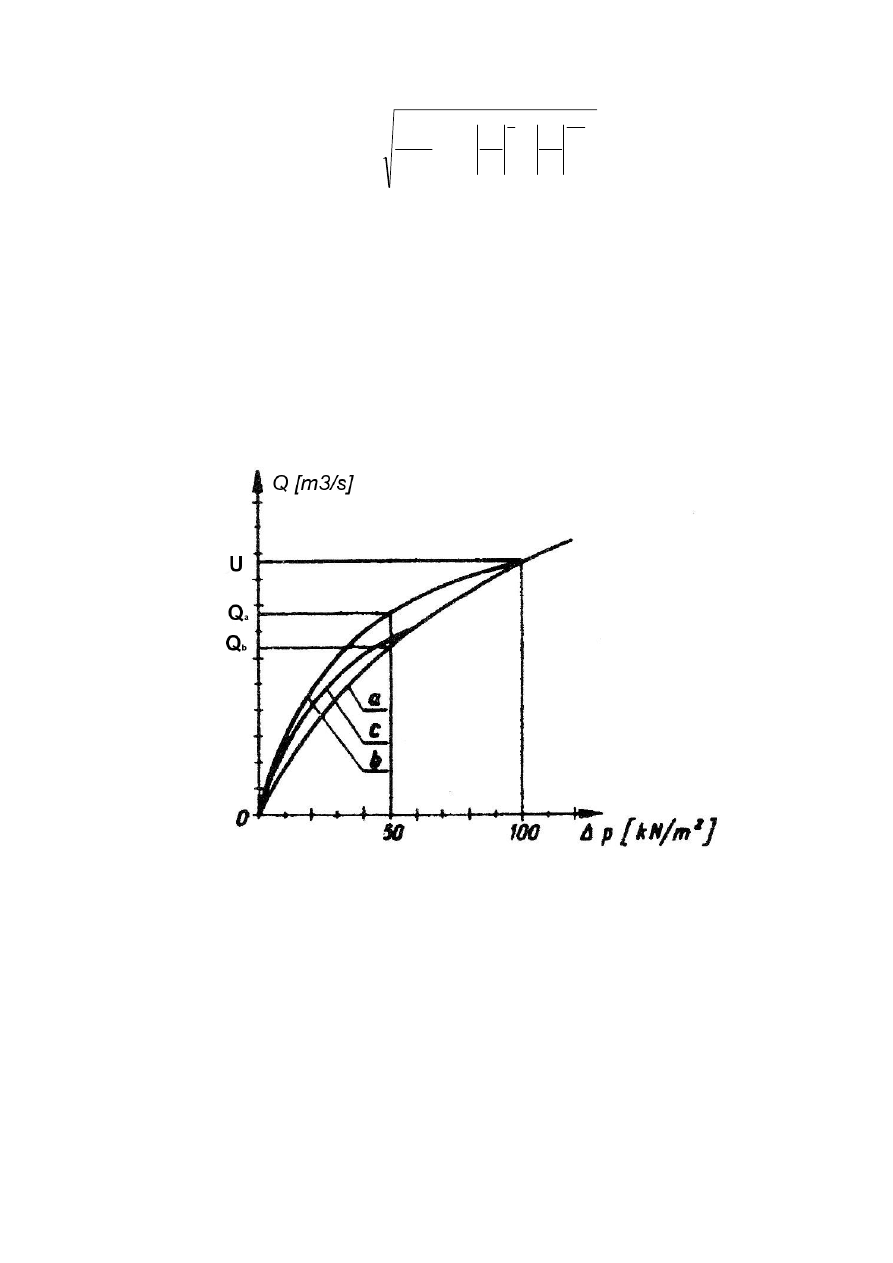
Rys. 6.2. Charakterystyka przepływowa oporu pneumatycznego
Charakterystykę przepływową oporu pneumatycznego, tzn.: określenie natężenia
przepływu przez opór w funkcji spadku ciśnienia na nim, dla określonego zakresu
zmienności ciśnienia przed i za oporem (rys. 6.2) określa się:
- przez badania laboratoryjne,
- metodą analityczno-doświadczalną.
41
Podstawy automatyki - laboratorium
6.3 Oporność pneumatyczna
Oporem (rezystorem) pneumatycznym jest dowolny element przepływowy, który
wywoduje trwały spadek ciśnienia przepływającego powietrza. Charakteryzuje go
oporność pneumatyczna R, będąca współczynnikiem proporcjonalności między spadkiem
ciśnienia
∆p i masowym natężeniem przepływu Q
m
m
RQ
p
=
∆
skąd
m
Q
p
R
∆
=
(6.1)
Jednostka podstawowa oporności pneumatycznej wynika ze wzoru (6.1) i jednostek
ciśnienia (N/m
2
) oraz natężenia przepływu (kg/s)
[R] =
s
m
kg
s
m
N
⋅
=
⋅
1
2
Jednostka ta jest bardzo mała i z tego względu dla celów praktycznych wprowadzono
jedenastkę pochodną, nazwaną „om płynowy"
ms
p
1
10
1
8
=
Ω
Opory mogą być liniowe i nieliniowe. Oporność tych pierwszych nie zależy od natężenia
przepływu, a zależność
)
(
m
Q
f
p
=
∆
(6.2)
jest równaniem linii prostej. W drugim przypadku oporność jest funkcją natężenia
przepływu, a zależność (6.2) przedstawia równanie linii wykładniczej.
Opory liniowe mają postać kapilar o długości l przynajmniej 10 razy większej od średnicy
wewnętrznej d, tzn. l/d
≥ 10, w których występuje przepływ laminarny, a ściśliwość
czynnika może być pominięta. Opory te znane są również pad nazwą oporów laminarnych.
Oporność kapilary przy przepływie laminarnym i założeniu nieściśliwości czynnika
wynosi
ρ
πη
πρ
η
2
4
8
2
A
l
B
d
l
B
R
=
=
(6.3)
gdzie:
η- dynamiczny współczynnik lepkości,
ρ - gęstość czynnika za kapilarą,
A - pole przekroju poprzecznego kapilary,
B - współczynnik korekcyjny, uwzględniający straty związane z tworzeniem się
parabolicznego profilu prędkości w początkowym odcinku kapilary.
Zależność B = f (l/d) podaje wykres na rys. 6.3. Przy l/d
→∞ B = 64, a wzór (6.3)
przyjmuje postać równania Hagena-Poisseuille’a dla przepływu laminarnego
4
128
d
l
Q
p
m
πρ
η
=
∆
(6.4)
Warto zwrócić uwagę, że oporność krótkich kapilar (1/d = 10
÷15) jest ponad 2 razy
większa od wyliczonej z tradycyjnego wzoru (6.4).
42
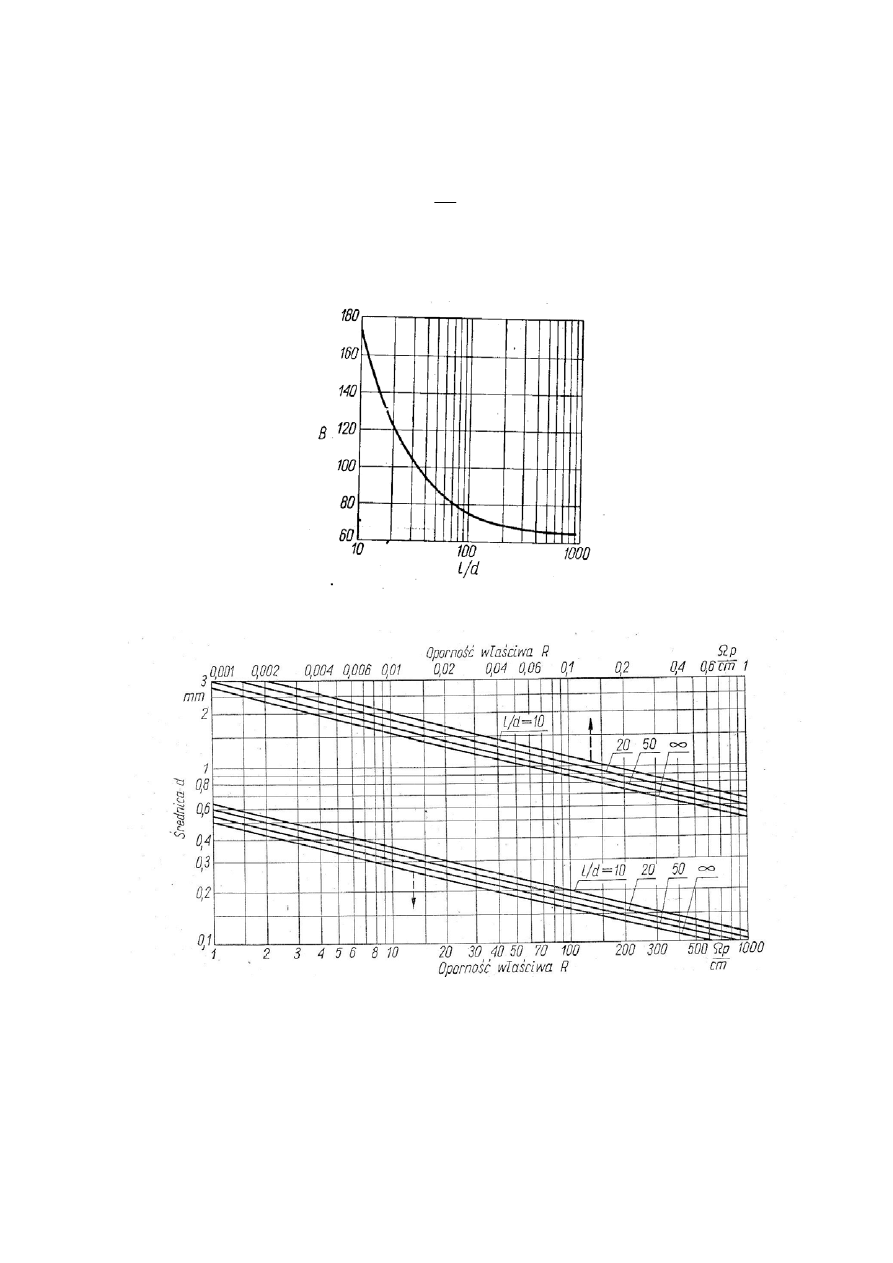
Podstawy automatyki - laboratorium
Podstawiając do wzoru (6.3) parametry powietrza o temperaturze
ϑ= 20°C i ciśnieniu
absolutnym p
a
= 101,3 kPa (
ρ= 1,205 kg/m
3
,
η= 18,1 • 10
-6
Ns/m
2
) i wyrażając długość l i
średnicę d w mm, otrzymuje się
p
d
l
B
R
Ω
⋅
=
−4
4
10
955
,
0
(6.5)
W przybliżonych obliczeniach oporności R można posługiwać się wykresem (rys. 6.4)
sporządzonym w oparciu o wzór (6.5).
Rysunek 6.3. Zależność współczynnika B od stosunku l/d
Rysunek 6.4. Nomogram do wyznaczania oporności kapilar
Wzory (6.3), (6.4) i (6.5), nie uwzględniające ściśliwości czynnika, można stosować z wystarczającą dla
praktyki dokładnością przy
∆p < 10 kPa. Przy wyższych spadkach ciśnienia ∆p gęstość czynnika ρ
należy wyznaczać dla średniego ciśnienia:
)
(
5
,
0
2
1
p
p
p
śr
+
=
(6.6)
Oporność kanałów o przekroju prostokątnym oblicza się z zależności
R
P
= R
k
K (6.7)
43
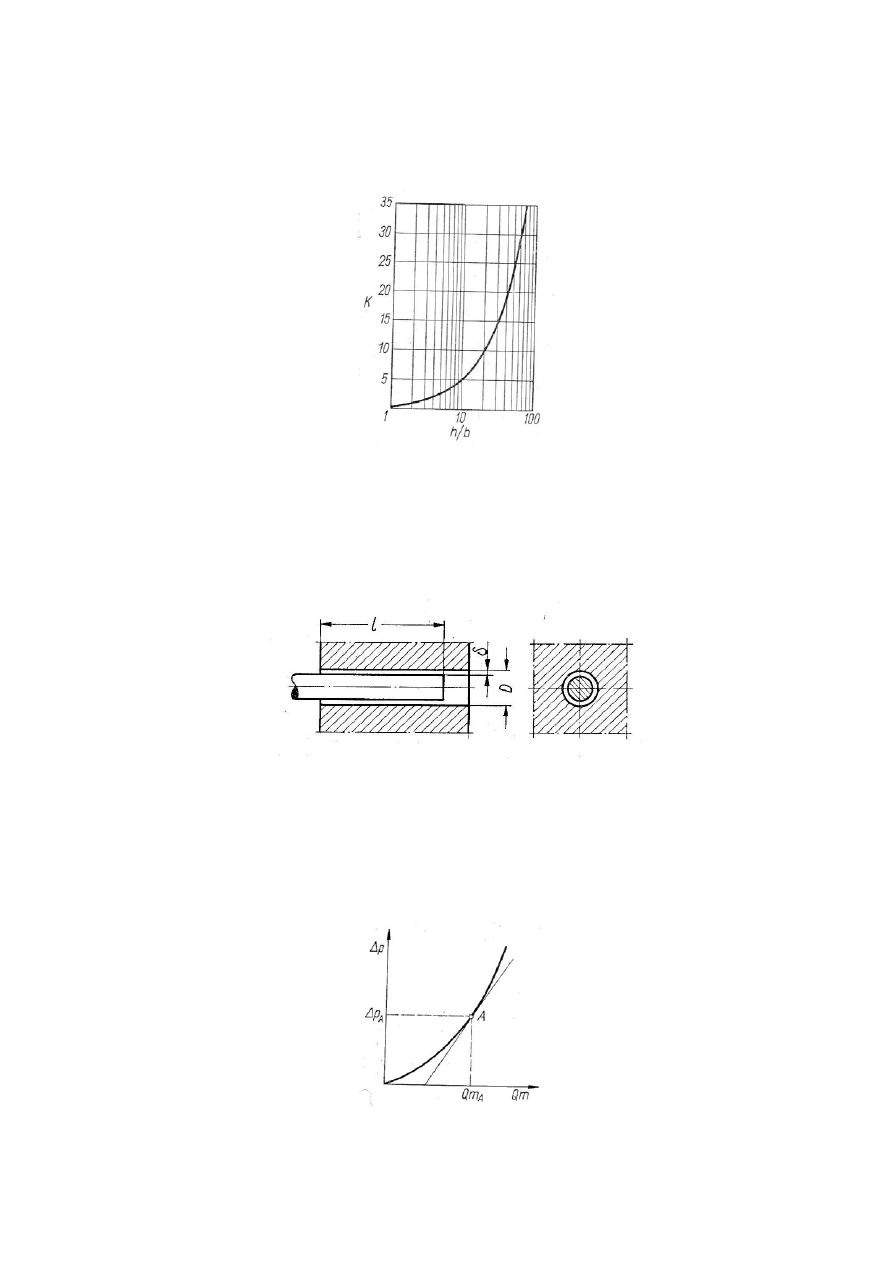
Podstawy automatyki - laboratorium
gdzie: R
k
- oporność kapilary o przekroju kołowym, której pole A = h
⋅b (h i b boki
przekroju prostokątnego), K = f(h/b) - współczynnik korekcyjny wyznaczany z wykresu
(rys. 6.5).
Rysunek 6.5 Zależność współczynnika korekcyjnego K od stosunku h/b
Oporność kanałów szczelinowych (rys. 6.6) oblicza się z zależności (6.3), (6.4) i (6.5) pod
warunkiem dokonania w nich podstawienia d
4
≈ 10
.
D
.
δ
3
Rysunek 6.6 Kanał (oporność szczecinowa)
Oporami nieliniowymi są wszelkiego rodzaju przewężenia, w których zazwyczaj
występuje przepływ burzliwy, dlatego też czasem te opory nazywa się turbulentnymi.
Należą tu kryzy, dysze, zawory, krótkie kanały połączeniowe itp.
Przykładową charakterystykę oporu nieliniowego (zależność spadku ciśnienia
∆p od
natężenia przepływu Q
m
) przedstawiono na rys. 6.7.
Rysunek 6.7 Charakterystyka oporu nieliniowego
44
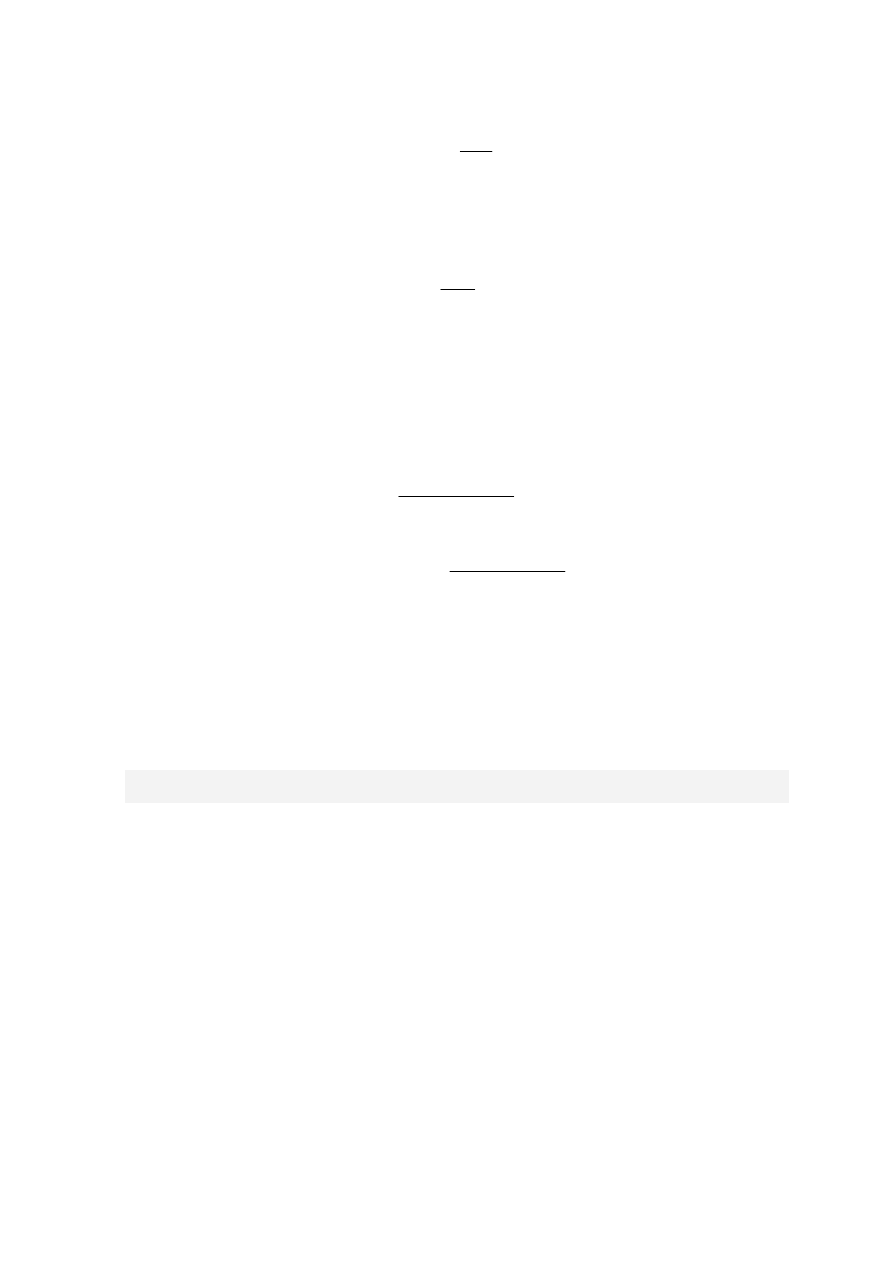
Podstawy automatyki - laboratorium
Oporność w punkcie A krzywej oblicza się jako stosunek
mA
A
st
Q
p
R
∆
=
Jest to oporność statyczna, którą można posługiwać się tylko przy obliczeniach
statycznych w określonym punkcie pracy.
Do analizy dynamicznej używane jest pojęcie oporności przyrostowej (różnicowej),
definiowanej jako tangens kąta pochylenia stycznej w punkcie A (rys. 6.7)
mA
Q
Qm
A
p
p
m
p
dQ
p
d
R
=
∆
=
∆
∆
=
Oporność tę, wyrażającą zależność między zmianami spadku ciśnienia i natężenia
przepływu, odbywającymi się dookoła (w pobliżu) określonego punktu pracy, można
przyjmować za liniową jedynie przy niewielkich zmianach
∆p i Q
m
. Mamy więc tu do
czynienia z linearyzacją zależności
∆p = f (Q
m
) w punkcie pracy; opór nieliniowy
traktowany jest tu jako liniowy.
Oporność statyczna R
st
w punkcie pracy
∆p=∆p
0
, Q
m
= Q
m0
ma postać
2
2
2
2
0
2
ρ
ε
α
⋅
⋅
⋅
=
A
Q
R
m
st
. 3.37
Natomiast oporność przyrostowa RP w tym samym punkcie pracy zgodnie z zależnością (3.36)
wynosi
2
2
2
2
0
2
2
ρ
ε
α
⋅
⋅
⋅
⋅
=
A
Q
R
m
p
Jak widać, oporność przyrostowa jest dwukrotnie większa od oporności statycznej,
wyznaczonej w tym samym punkcie pracy.
opracowa
ł
mgr in
ż
. Grzegorz Maniarski
45
Podstawy automatyki - laboratorium
L
L
i
i
t
t
e
e
r
r
a
a
t
t
u
u
r
r
a
a
[1] Chorowski B., Weryszko M.: Mechaniczne urządzenia automatyki. WNT;
Warszawa 1990r.
[2] Siemieniako
F.,
Żdanuk W.: Laboratorium podstaw automatyki. Skrypt Politechniki
Białostockiej 1999r.
[3] Łasiński K.: Elementy automatyki dla mechaników. Skrypt Wyższej Szkoły
Inżynierskiej; Zielona Góra 1993r.
[4] Red. Findeisen: Poradnik inżyniera automatyka. WNT; Warszawa 1973r.
46
Wyszukiwarka
Podobne podstrony:
FESTO Podstawy automatyzacji
12 Podstawy automatyki Układy sterowania logicznego
podstawy automatyki ćwiczenia lista nr 4b
Podstawy automatyki cz1
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
Podstawy automatyki 2
podstawy automatyki
Podstawy automatyki (w 5) elementy wykonawcze i pomiarowe ppt [tryb zgodnosci]
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
Konspekt wykładów z Podstaw automatyki wykład 5
podstawy automatyki ćwiczenia lista nr 3c
podstawy automatyki ćwiczenia lista nr 4d
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
Moja ściąga 2. kolos, Szkoła, Semestr 4, Podstawy automatyki
podstawy automatyki ćwiczenia lista nr 4d
Podstawy automatyki (w 1 i 2) p Nieznany
więcej podobnych podstron