Akademia Górniczo-Hutnicza
im. St. Staszica
Wydział Inżynierii Mechanicznej i Robotyki
SPRAWOZDANIE
M6 – Zasilacz elektroniczny i wzmacniacz operacyjny
Grupa dziekanatowa: E1 (13)
Grupa laboratoryjna: C
Data wykonania ćwiczenia: 18.05.2015r.
Prowadzący zajęcia: mgr Henryk Krawiec
Kraków, 24 maja 2015 r.
Wykonawcy
------------------------
------------------------
------------------------
------------------------
------------------------
------------------------
------------------------
6.1 Zasilacz elektroniczny
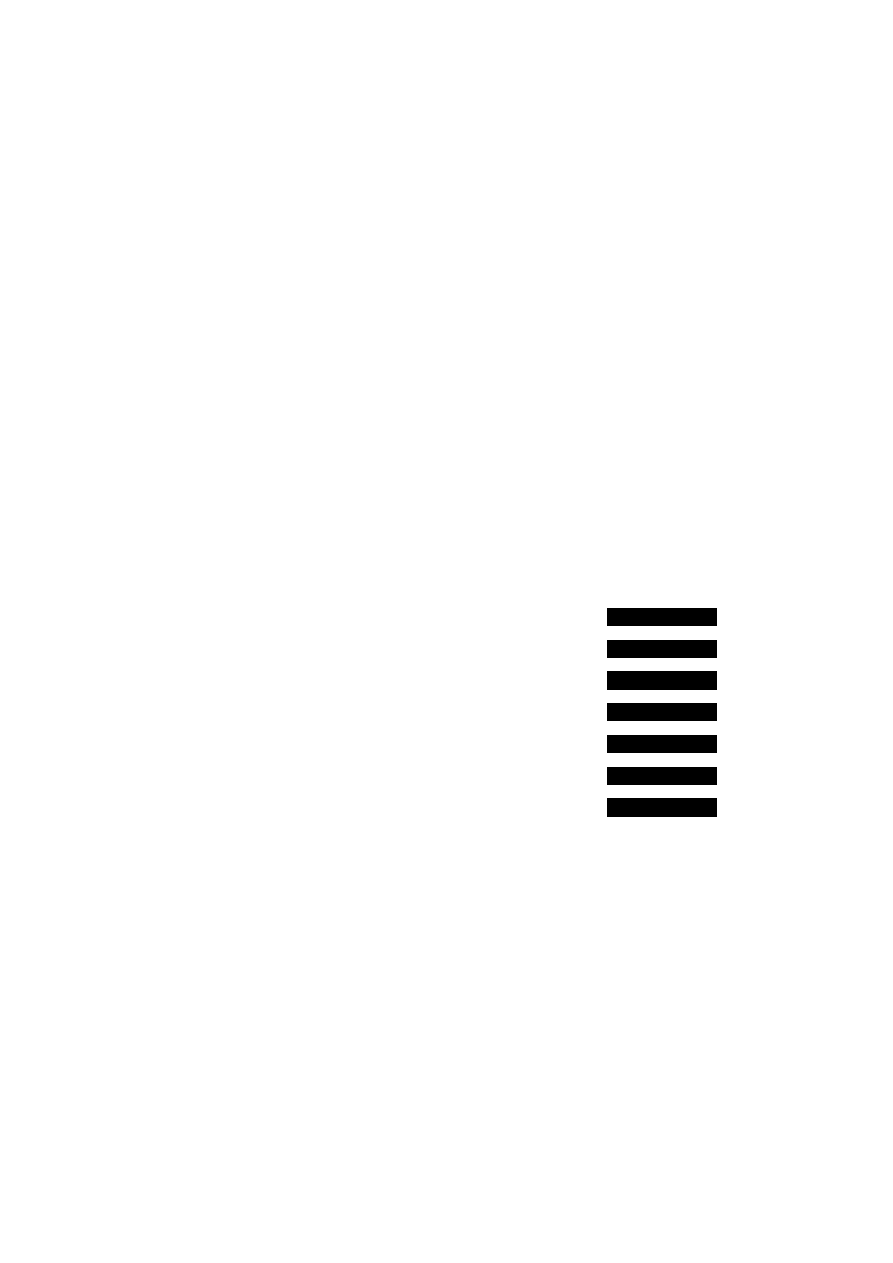
Mostek Gretza (zwany także mostkiem prostowniczym) to układ czterech diod połączonych
w sposób w specyficzny układ prostujący prąd przy wykorzystaniu obu połówek napięcia
przemiennego (prostownik dwupołówkowy). W układzie takim niezależnie od kierunku
przepływu prądu na wejściu prąd na wyjściu płynie zawsze w tę samą stronę. W określonej
chwili dwie z tych diod pracują przy polaryzacji w kierunku przewodzenia, a dwie w kierunku
zaporowym; przy zmianie kierunku prądu wejściowego te pary zamieniają się rolami.
Pokazany na poniższym rysunku:
Rys. 6.1. Układ mostka Gretza
Na rysunku 6.1 pokazano dodatkowo rezystor R służący jako obciążenie mostka Gretza.
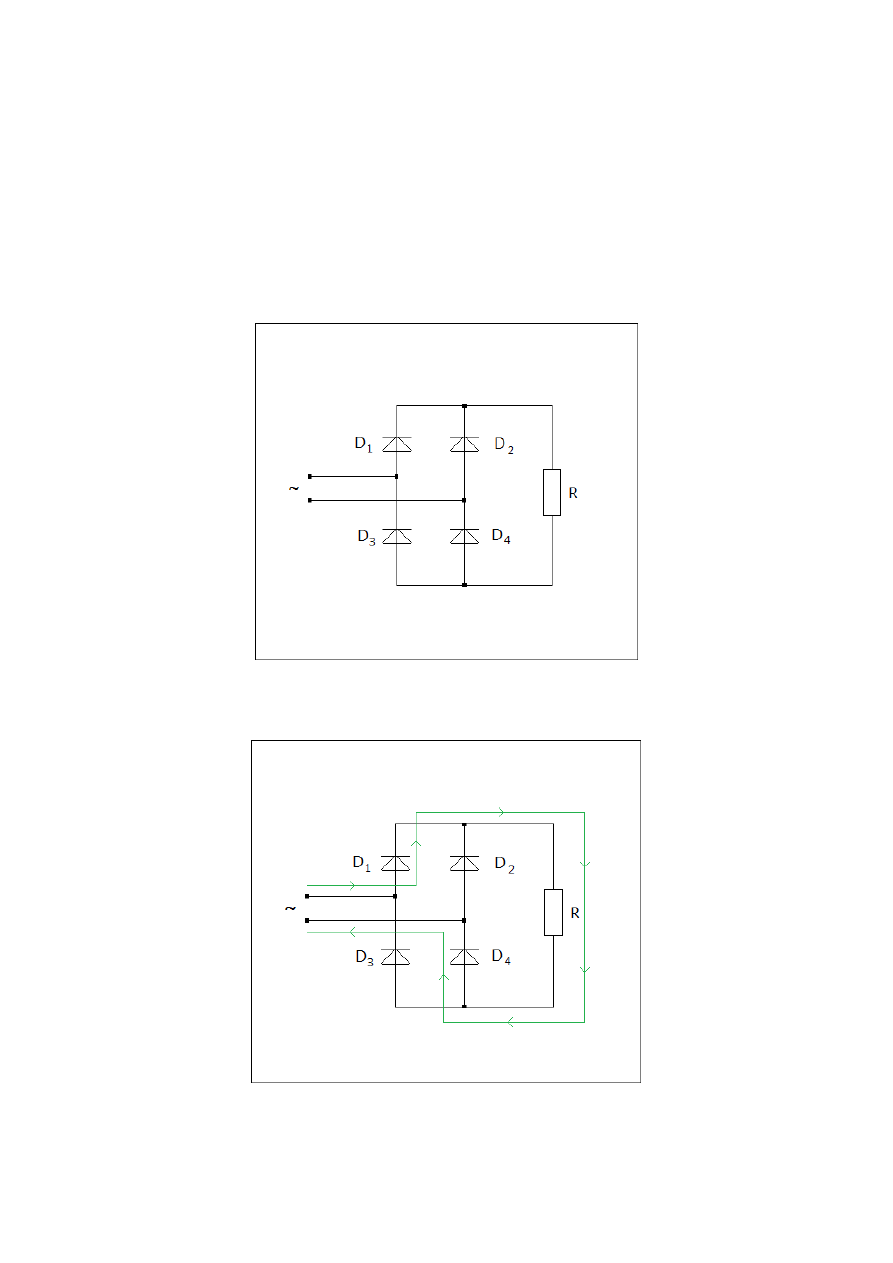
Rys. 6.2. Przepływ prądu dla dodatniej połówki przebiegu wejściowego. Przewodzą diody D1 i D4.
Rys. 6.3. Przepływ prądu dla ujemnej połówki przebiegu wejściowego. W tym przypadku przewodzą diody D2 i
D3
Na rysunku 6.5. przedstawiono na ekranie oscyloskopu napięcie sinusoidalnie zmienne po
przejściu przez mostek Gretza.
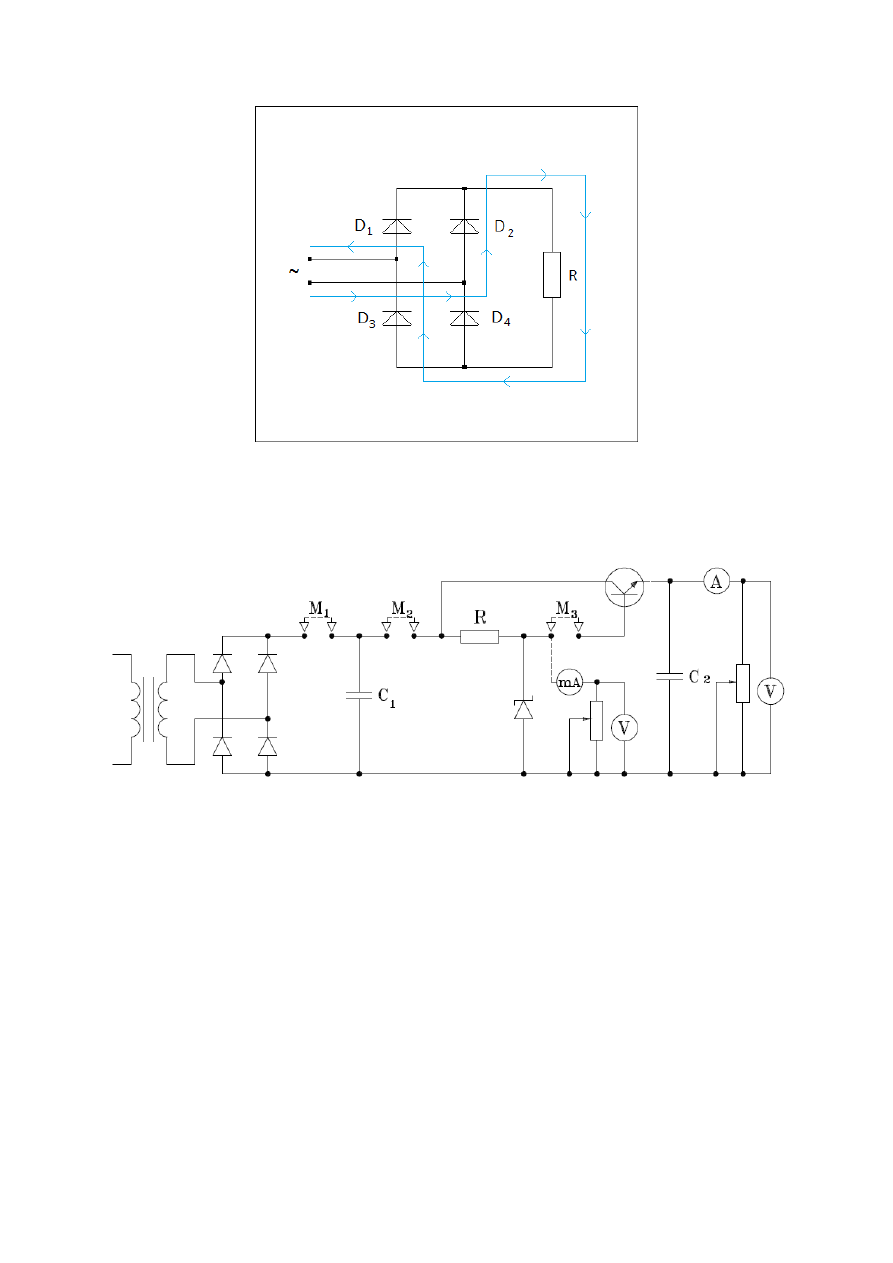
Rys. 6.4: Układ zasilacza elektronicznego badanego w laboratorium
Za pomocą oscyloskopu wykonaliśmy pomiary napięć: maksymalnego wyprostowanego,
średniego wyprostowanego (metodą trapezu) i wstecznego dla tego układu.
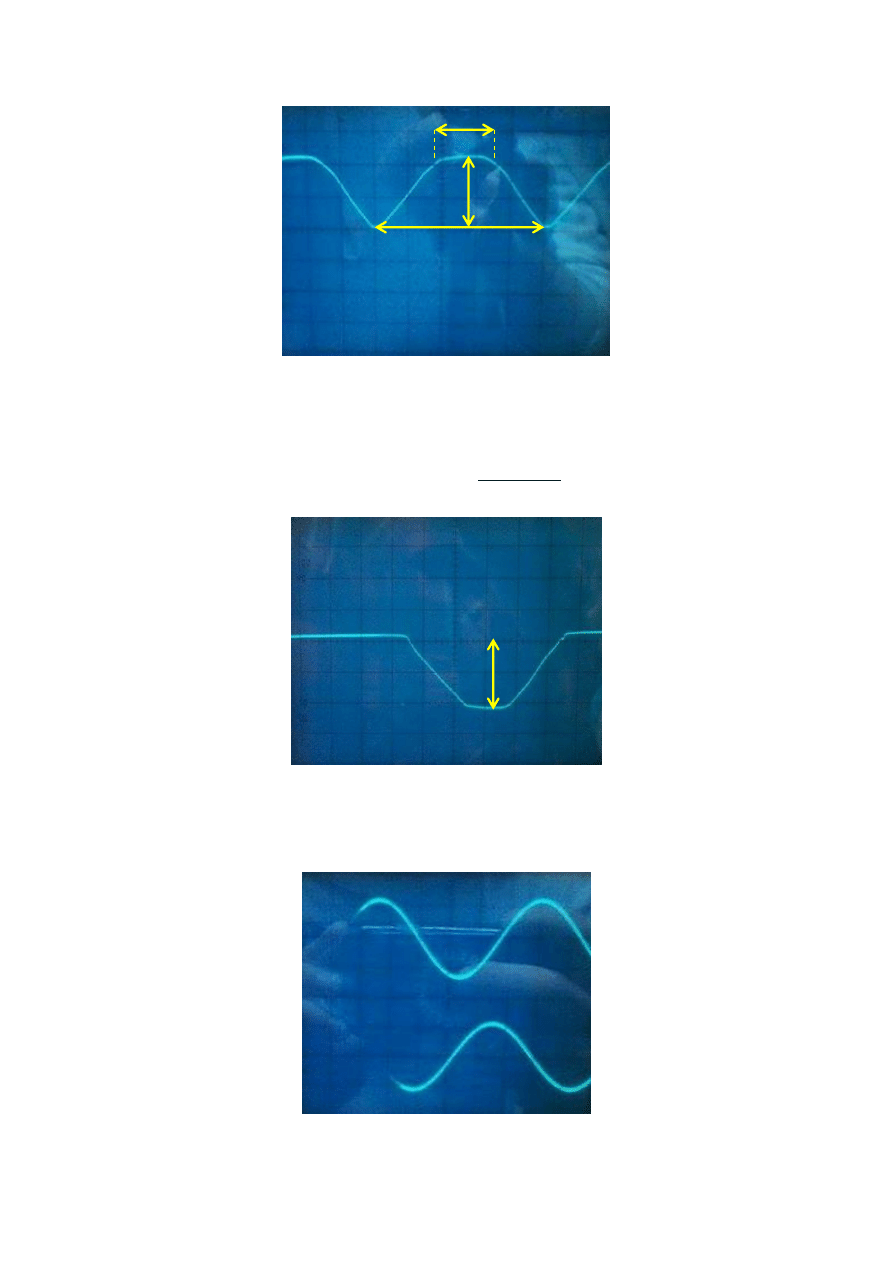
Rys. 6.5. Napięcie po przejściu przez mostek Gretza
Wartość maksymalna napięcia wyprostowanego: 𝑈
𝑚𝑎𝑥
= 11𝑉
Wartość średnia napięcia wyprostowanego: 𝑈
ś𝑟
=
(5𝑡+1,5𝑡)∙11𝑉
2∙5𝑡
= 7,15𝑉
Rys. 6.6. Napięcie wsteczne na oscyloskopie
Wartość maksymalna napięcia wstecznego: 𝑈
max 𝑤𝑠𝑡𝑒𝑐𝑧𝑛𝑒
= 11𝑉
Rys. 6.7. Obserwacja składowej zmiennej napięcia zasilacza za pomocą oscyloskopu
5t
1,5t
11V
11V
Charakterystyka stabilizatorów
Stabilizator napięcia stałego to układ elektryczny dostarczający do odbiornika napięcie o
stałej wartości. W zasilaczach wyróżniamy dwa rodzaje stabilizatorów:
a) parametryczne - wykorzystują nieliniowe charakterystyki napięciowo - prądowe
elementów użytych do budowy stabilizatora. Najczęściej wykorzystywanym elementem
stabilizującym jest dioda Zenera.
b) kompensacyjne - porównują napięcie stabilizowane ze wzorcowym i w przypadku ich
różnicy tak działają na element sterujący, że kompensuje on zmiany napięcia wyjściowego.
Obecnie stabilizatory kompensacyjne budowane są jako układy, w których skład wchodzi
wiele elementów połączonych w oparciu o złożony schemat wewnętrzny.
U
V
4,2
2
1,6
3
4,5
3,6
1,2
I
mA
44
62
66
54
12
51
70
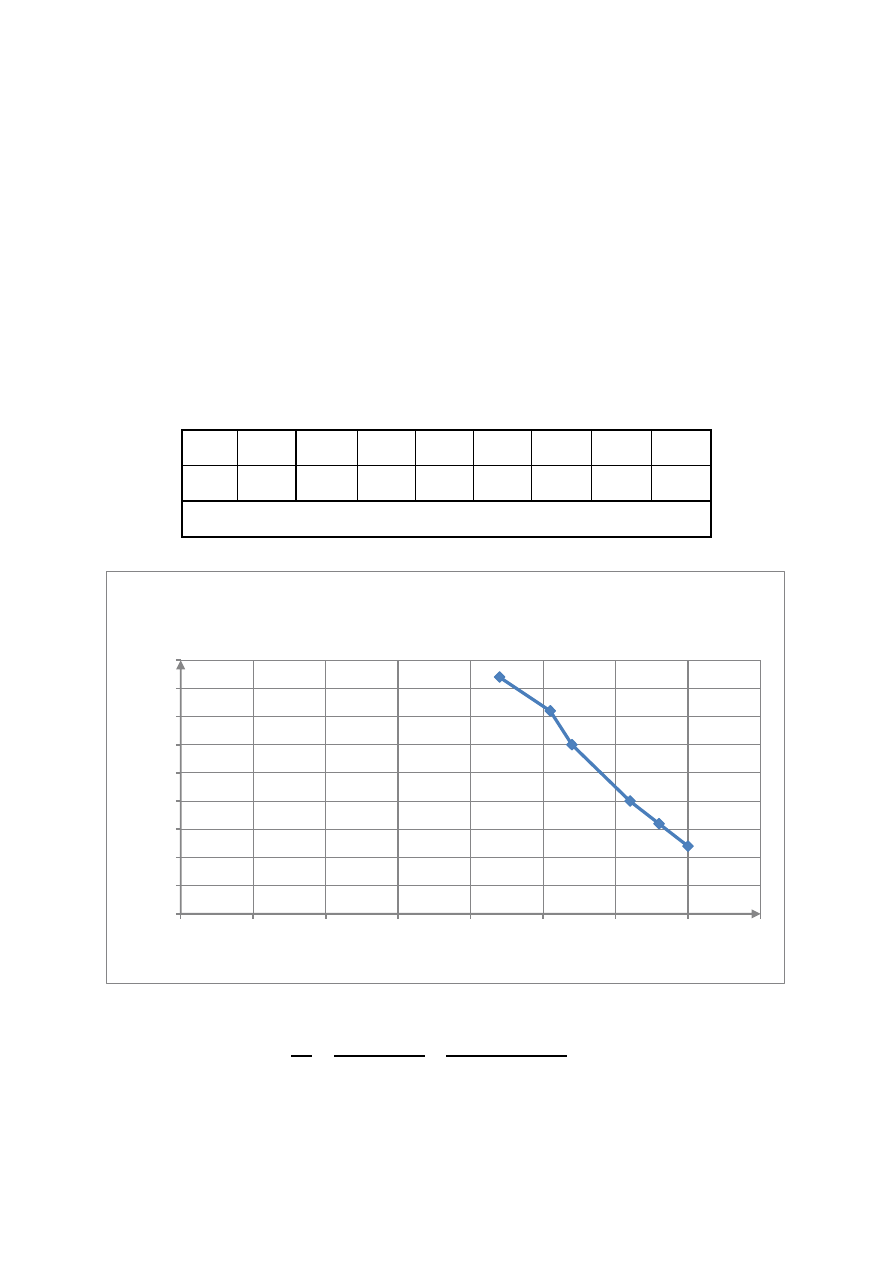
Stabilizator parametryczny
Pomiar dla napięcia 4,5V odrzucony jako błąd gruby.
𝑅
𝑤𝑒𝑤
=
∆𝑈
∆𝐼
=
𝑈
𝑚𝑎𝑥
− 𝑈
𝑚𝑖𝑛
𝐼
𝑚𝑖𝑛
− 𝐼
𝑚𝑎𝑥
=
4,2𝑉 − 1,2𝑉
0,044𝐴 − 0,070𝐴
= −115,38Ω
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
0
10
20
30
40
50
60
70
80
U
w
yj
[V]
I
wyj
[mA]
Charakterystyka prądowo-napięciowa stabilizatora
parametrycznego
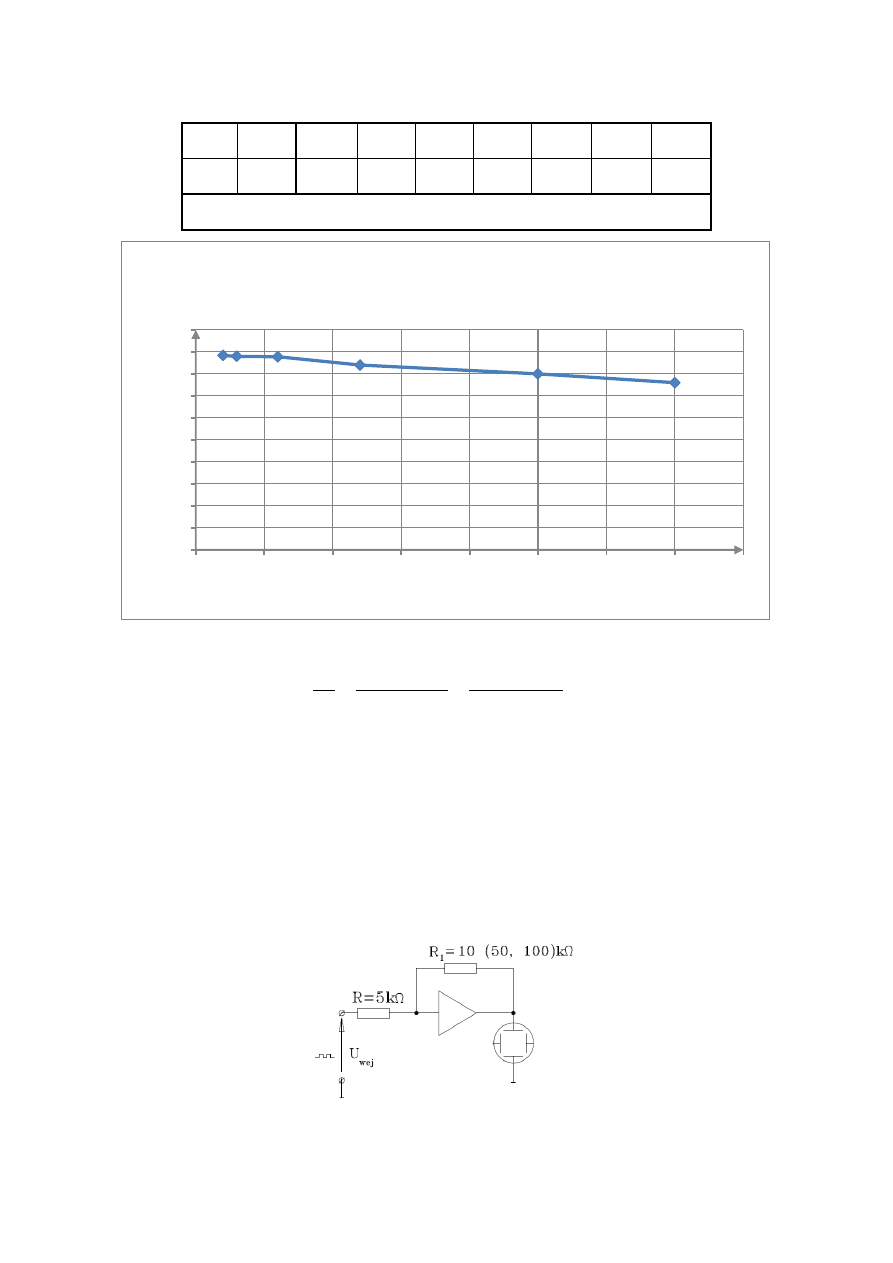
Pomiar dla napięcia 3,6V odrzucony jako błąd gruby.
𝑅
𝑤𝑒𝑤
=
∆𝑈
∆𝐼
=
𝑈
𝑚𝑎𝑥
− 𝑈
𝑚𝑖𝑛
𝐼
𝑚𝑖𝑛
− 𝐼
𝑚𝑎𝑥
=
4,42𝑉 − 3,8𝑉
0,04𝐴 − 0,7𝐴
= −0,93Ω
6.2 Wzmacniacz operacyjny
Wzmacniacz operacyjny to wielostopniowy, różnicowy wzmacniacz prądu stałego,
charakteryzujący się bardzo dużym różnicowym wzmocnieniem napięciowym. Zwykle służy
on podobnie jak inne wzmacniacze do wzmocnienia napięcia czy też mocy, różni się jednak
od zwykłych wzmacniaczy tym, że w przeciwieństwie do nich sposób jego działania zależy
głównie od zastosowanego zewnętrznego obwodu.
Rys. 6.8. Układ w laboratorium do badania wzmocnienia wzmacniacza
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
U
w
yj
[V]
I
wyj
[A]
Charakterystyka prądowo-napięciowa stabilizatora
kompensacyjnego
U
V
4,2
4
3,8
3,6
4,4
4,42
4,39
I
A
0,024
0,5
0,7
0,7
0,04
0,06
0,12
Stabilizator kompensacyjny
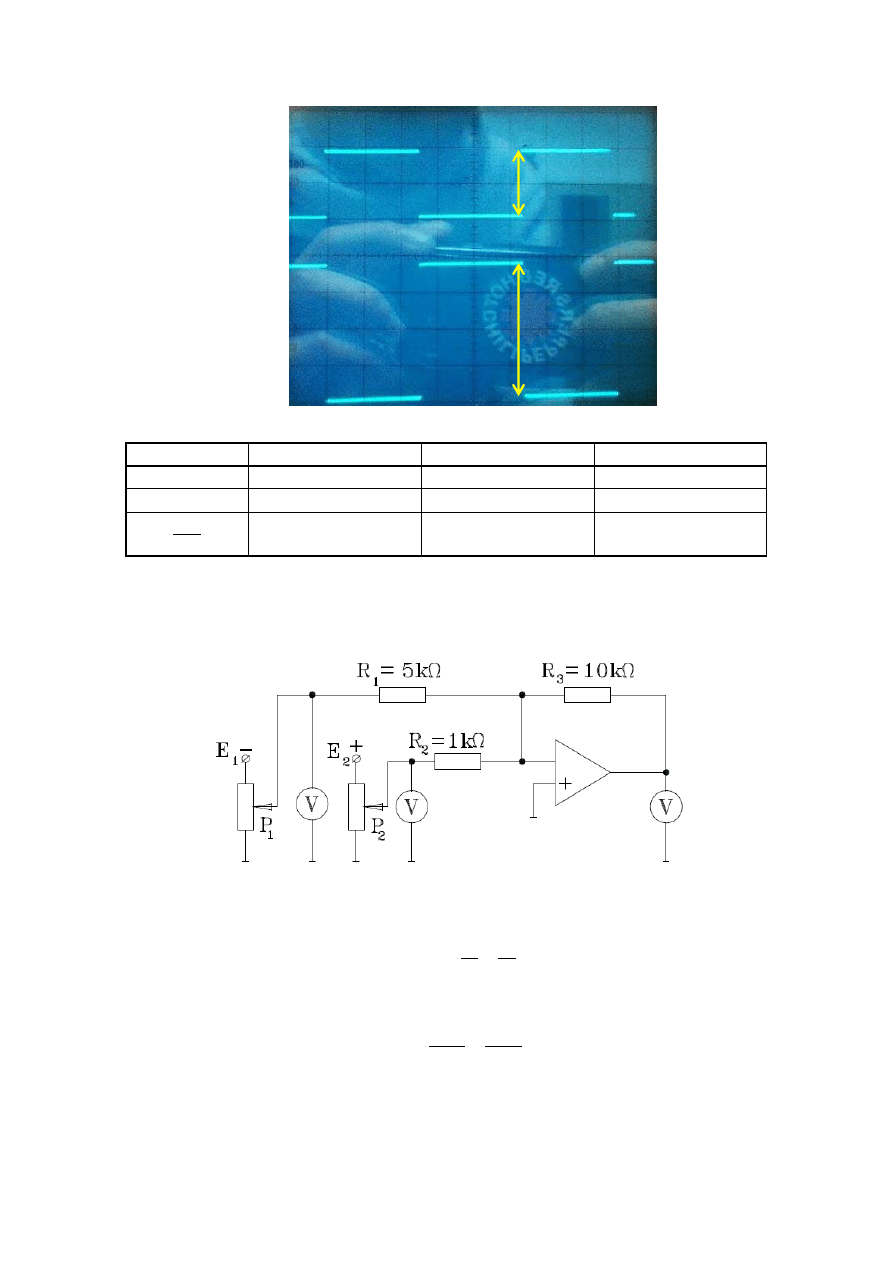
Rys. 6.9. Obraz z oscyloskopu do oczytu napięć wejścia i wyjścia (w tym wypadku dla R
1
)
𝐑
𝟏
= 𝟏𝟎𝐤Ω
𝐑
𝟐
= 𝟓𝟎𝐤Ω
𝐑
𝟑
= 𝟏𝟎𝟎𝐤Ω
𝐔
𝐰𝐞
±1V
± 1V
±1V
𝐔
𝐰𝐲
∓2V
∓10V
∓15V
𝐔
𝐰𝐲
𝐔
𝐰𝐞
2
10
15
Wbrew przewidywaniom, przy zastosowaniu opornika R
3
𝑈
𝑤𝑦
≠ 30𝑉. Wynika to z tego, że
napięcie wyjścia nie może być wyższe od napięcia zasilania.
Rys. 6.10. Wzmacniacz operacyjny w układzie sumacyjnym
𝑈
𝑤𝑦
= −𝑅
3
(
𝐸
1
𝑅
1
+
𝐸
2
𝑅
2
)
E
1
=-2V;
E
2
=1V;
R
1
=5000V;
R
2
=1000V;
R
3
=10000V;
𝑈
𝑤𝑦
= −10000 (
−2
5000
+
1
1000
) = −6𝑉
Odczyt woltomierza: -6,008V
+1V
-2V

Zmierzona wartość sumacyjnej pracy wzmacniacza wynosi −6,008𝑉 zaś obliczona −6𝑉.
Różnica ta wynika ze strat powodowanych rezystancją przewodów oraz niepewności
pomiarowych.
PLC
PLC (Programowalny Sterownik Logiczny) (
ang.
Programmable Logic Controller) –
uniwersalne urządzenie mikroprocesorowe przeznaczone do sterowania pracą maszyny lub
urządzenia technologicznego. Sterownik PLC musi zostać dopasowany do określonego
obiektu sterowania poprzez wprowadzenie do jego pamięci żądanego
algorytmu
działania
obiektu. Cechą charakterystyczną sterowników PLC odróżniającą ten sterownik od innych
sterowników komputerowych jest cykliczny obieg pamięci programu. Algorytm jest
zapisywany w dedykowanym sterownikowi języku programowania.
Cykl pracy sterownika można zapisać krokowo:
1. Autodiagnostyka
2. Odczyt wejść
3. Wykonanie programu
4. Zadania komunikacyjne
5. Ustawienia wyjść
Sterownik nie posiada jak procesor linii wejścia/wyjścia tylko określoną liczbę wejść i wyjść.
W procesorach można definiować czy linia ma być wejściem czy wyjściem – w sterownikach
PLC nie.
Wyszukiwarka
Podobne podstrony:
Sprawozdanie M6 B-7, AGH, MiBM - I rok, Elektrotechnika, Sprawka - elektro, M6
Sprawozdanie M6 B-7, AGH, MiBM - I rok, Elektrotechnika, Sprawka - elektro, M6
M6 Zasilacz elektroniczny i wzmacniacz operacyjny
Sprawozdanie M6, AGH IMIR, I ROK, Elektrotechnika, Sprawozdania Elektra
Napęd Elektryczny wykład
Podstawy elektroniki i miernictwa2
elektryczna implementacja systemu binarnego
urządzenia elektrotermiczn
Podstawy elektroniki i energoelektroniki prezentacja ppt
Elektryczne pojazdy trakcyjne
elektrofizjologia serca
Ćwiczenia1 Elektroforeza
elektrolity 3
Urządzenia i instalacje elektryczne w przestrzeniach zagrożonych wybuchem
więcej podobnych podstron