M7: Badanie ruchu obrotowego bryły sztywnej.
Przemysław Kołoczek.
1. Wstęp.
Bryła sztywna to ciało , które nie ulega odkształceniom pod wpływem działających na nie
sił. Ruch takiej bryły składa się na ruch postępowy jej środka masy i ruch obrotowy.
Środek masy bryły sztywnej dany jest przez wektor:
𝑅⃗ = ∑
𝑚
𝑖
𝑟
𝑖
⃗⃗
𝑀
𝑛
𝑖=1
gdzie M to masa bryły, m
i
– część masy bryły, r
i
– położenie masy m
i
. Bryła ta ma również
moment bezwładności względem jakiejś osi obrotu (np. A):
𝐼
𝐴
= ∑ 𝑚
𝑖
(𝑟
𝐴
)
𝑖
2
𝑛
𝑖=1
gdzie (r
A
)
i
– odległość masy m
n
od osi A. Jeżeli bryła jest ciągła, to:
𝐼
𝐴
= ∫ 𝑟
𝐴
2
𝑑𝑚
przy czym całkowanie odbywa się po całej objętości bryły sztywnej.
Bryła wykonuje ruch obrotowy gdy działa na nią wypadkowy moment siły 𝑀
⃗⃗ , przy czym
jeśli jest on równy zero, to bryła spoczywa albo obraca się ze stałą prędkością kątową.
Równanie ruchu obrotowego bryły sztywnej wokół ustalonej osi A ma następującą postać:
𝑀
⃗⃗ = 𝐼
𝐴
𝜀 = 𝐼
𝐴
𝑑𝜔
⃗⃗
𝑑𝑡
= 𝐼
𝐴
𝑑
2
𝜑⃗
𝑑𝑡
2
= 𝐼
𝐴
𝑑𝐿⃗
𝑑𝑡
Wtedy wektory momentu siły 𝑀
⃗⃗ , momentu pędu 𝐿⃗ = 𝐼
𝐴
𝜔
⃗⃗ i prędkości kątowej 𝜔
⃗⃗ są do
siebie równoległe. Ogólnie wektory 𝐿
⃗ i 𝜔⃗⃗ nie są równoległe, więc muszą być powiązane ze
sobą przez:
𝐿⃗ = 𝐼̂𝜔
⃗⃗
gdzie 𝐼̂ to tensor (bezwładności) symetryczny drugiego rzędu.
Gdy znany jest moment bezwładności bryły sztywnej względem osi, która przechodzi
przez jej środek masy, można wyznaczyć moment bezwładności względem dowolnej,
równoległej osi do tej, przechodzącej przez środek masy bryły sztywnej, korzystając z
twierdzenia Steinera:
𝐼
𝐴
= 𝐼
𝑂
+ 𝑀𝑑
2
gdzie d jest odległością między równoległymi osiami A (szukaną) i O (przechodzącą przez
środek masy bryły sztywnej). Dla jednorodnego walca moment bezwładności względem
osi, przechodzącej przez jego środek masy i pokrywającej się z osią symetrii obrotowej
walca wynosi 𝐼 =
1
2
𝑀𝑅
2
, a moment bezwładności względem osi prostopadłej, do osi
symetrii obrotowej walca i przechodzącej przez jego środek masy wynosi
𝐼 = 𝑀 (
1
4
𝑅
2
+
1
12
𝐻
2
), gdzie M – masa walca, R – promień podstawy walca, H – wysokość
walca.
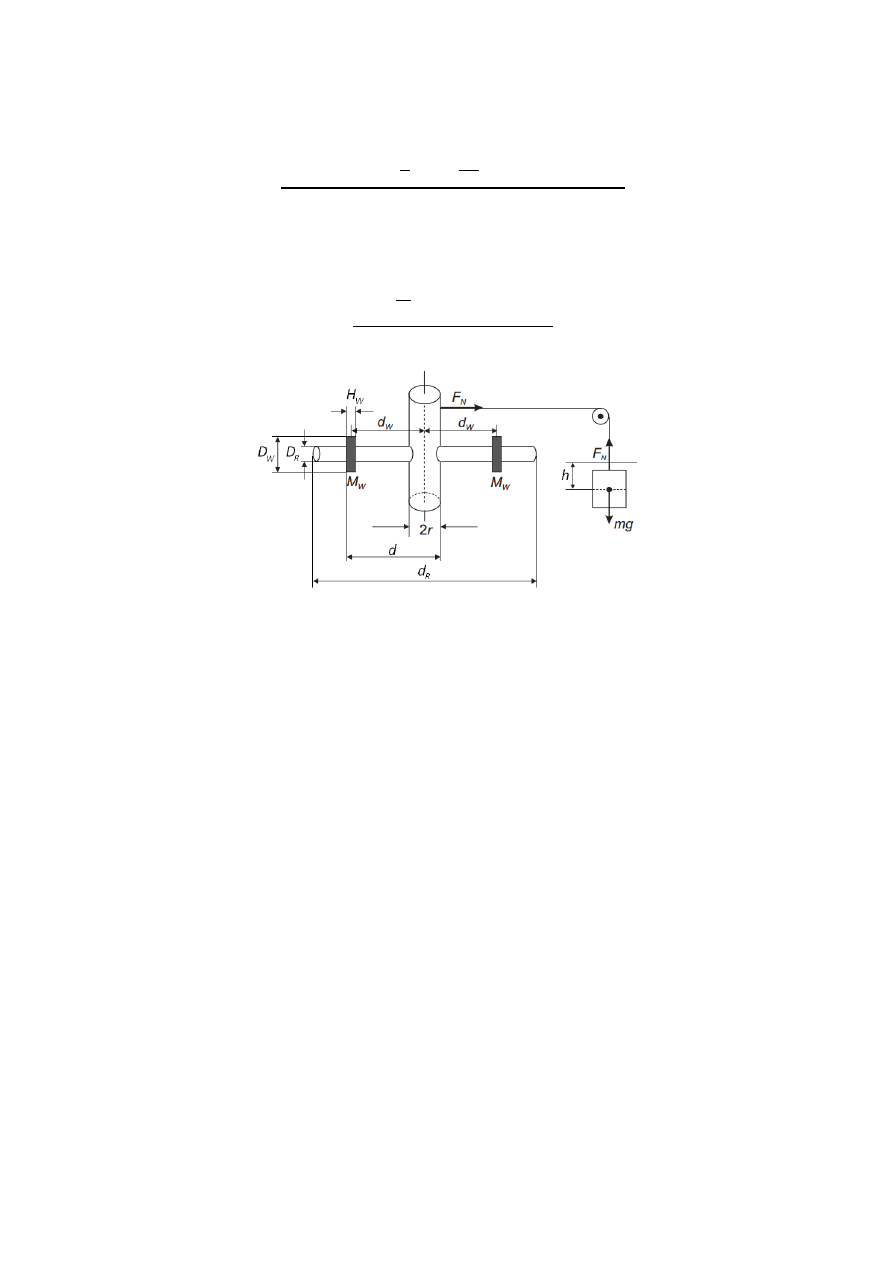
Wahadło Oberbecka to pręt (o promieniu r) z dwoma ramionami obracający się wokół
swojej osi symetrii. Na ramionach tego wahadła można zamontować walcowate ciężarki.
Moment bezwładności takiego ciężarka na obracającym się wahadle Oberbecka wynosi
𝐼
𝑊
= (𝐼
𝑊
)
𝑆𝑀
+ 𝑀
𝑊
𝑑
𝑊
2
= 𝑀
𝑊
(
1
4
𝑅
𝑊
2
+
1
12
𝐻
𝑊
2
+ 𝑑
𝑊
2
), gdzie M
W
– masa ciężarka, R
W
–
promień ciężarka, H
W
– wysokość ciężarka, d
W
– odległość ciężarka od osi obrotu wahadła.
Całkowity moment bezwładności układu (wahadło i 2 symetrycznie umieszczone ciężarki)
wynosi 𝐼 = 𝐼
𝑋
+ 2𝐼
𝑊
, gdzie I
X
– moment bezwładności wahadła bez ciężarków. Na
wahadło nawinięta jest nić, przerzucona przez bloczek, zakończona uchwytem na
obciążniki. Korzystając z praw ruchu postępowego obciążnika i praw ruchu obrotowego
wahadła:
{
𝐹
𝑁
= 𝑚𝑔 − 𝑚𝑎
𝐹
𝑁
𝑟 = 𝐼𝜀
𝜀 =
𝑎
𝑟
oraz z przytoczonej wcześniej zależności:
𝐼 = 𝐼
𝑋
+ 2𝐼
𝑊
otrzymujemy:
𝑎 =
𝑚𝑔𝑟
2
𝐼
𝑋
+ 2𝐼
𝑊
+ 𝑚𝑟
2
Ponadto, korzystając ze wzoru:
ℎ =
𝑎𝑡
2
2
Otrzymujemy zależność:
t
2
od h równą:
𝑡
2
=
2ℎ(𝐼
𝑋
+ 2𝐼
𝑊
+ 𝑚𝑟
2
)
𝑚𝑔𝑟
2
(1)
t
2
od d
w
2
równą:
𝑡
2
=
2ℎ (𝐼
𝑋
+ 2𝑀
𝑊
(
1
4 𝑅
𝑊
2
+
1
12 𝐻
𝑊
2
+ 𝑑
𝑊
2
) + 𝑚𝑟
2
)
𝑚𝑔𝑟
2
(2)
oraz t
2
od 1/m równą:
𝑡
2
=
2ℎ ((
1
𝑚) (𝐼
𝑋
+ 2𝐼
𝑊
) + 𝑟
2
)
𝑔𝑟
2
(3)
2. Opis doświadczenia.
Zmierzono długości i średnice ramion wahadła, zmierzono średnicę samego wahadła,
włączono stoper. Ustalono i zmierzono położenia fotokomórek na statywie, ustalono
położenie początkowe szalki z obciążnikiem i zmierzono czas przelotu szalki między
fotokomórkami. Pomiar powtórzono jeszcze dwa razy. Pomiary powtórzono dla kolejnych
sześciu położeń drugiej fotokomórki. Ostatnie położenia fotokomórek i obciążnik
zachowano, na ramionach wahadła zawieszono takie same ciężarki w tej samej odległości
od osi obrotu wahadła, zmierzono odpowiednie odległości, zmierzono czas przelotu szalki.
Pomiar powtórzono jeszcze dwa razy. Pomiary powtórzono dla sześciu kolejnych położeń
ciężarków na ramionach wahadła. Ciężarki zdjęto, ostatnie położenia fotokomórek i
obciążnik zachowano, zmierzono dla nich czas przelotu szalki. Pomiar powtórzono jeszcze
dwa razy. Pomiary powtórzono dla sześciu kolejnych mas na szalce. Po zakończeniu
pomiarów obciążniki zdjęto i odłożono na miejsce, stoper i fotokomórki wyłączono,
przyrządy do pomiaru odległości oddano prowadzącemu.
3. Plan pracy.
a) Zmierzyć długości i średnice ramion wahadła, zmierzyć średnicę samego wahadła.
b) Ustalić i sprawdzić wzajemne położenie początkowe szalki z ciężarkiem i obu
fotokomórek.
c) Zbadać zależność t
2
od h:
– Wyznaczyć masę obciążnika, umieścić go na szalce.
– Zmierzyć czas przelotu szalki, kilkakrotne powtórzyć pomiar.
– Powtórzyć pomiary dla innych położeń drugiej fotokomórki.
Rysunek 1. Schemat układu doświadczalnego z wahadłem Oberbecka
d) Zbadać zależność t
2
od d
W
2
:
– Wyznaczyć masę ciężarków, nałożyć je na ramiona wahadła, zmierzyć ich położenia
od osi obrotu wahadła.
– Zmierzyć czas przelotu szalki, kilkakrotne powtórzyć pomiar.
– Powtórzyć pomiary dla innych położeń ciężarków od osi obrotu wahadła.
e) Zbadać zależność t
2
od 1/m:
– Usunąć ciężarki, wyznaczyć masę obciążnika, umieścić go na szalce.
– Zmierzyć czas przelotu szalki, kilkakrotne powtórzyć pomiar.
– Powtórzyć pomiary dla innych obciążeń szalki.
f) Uporządkować stanowisko pracy.
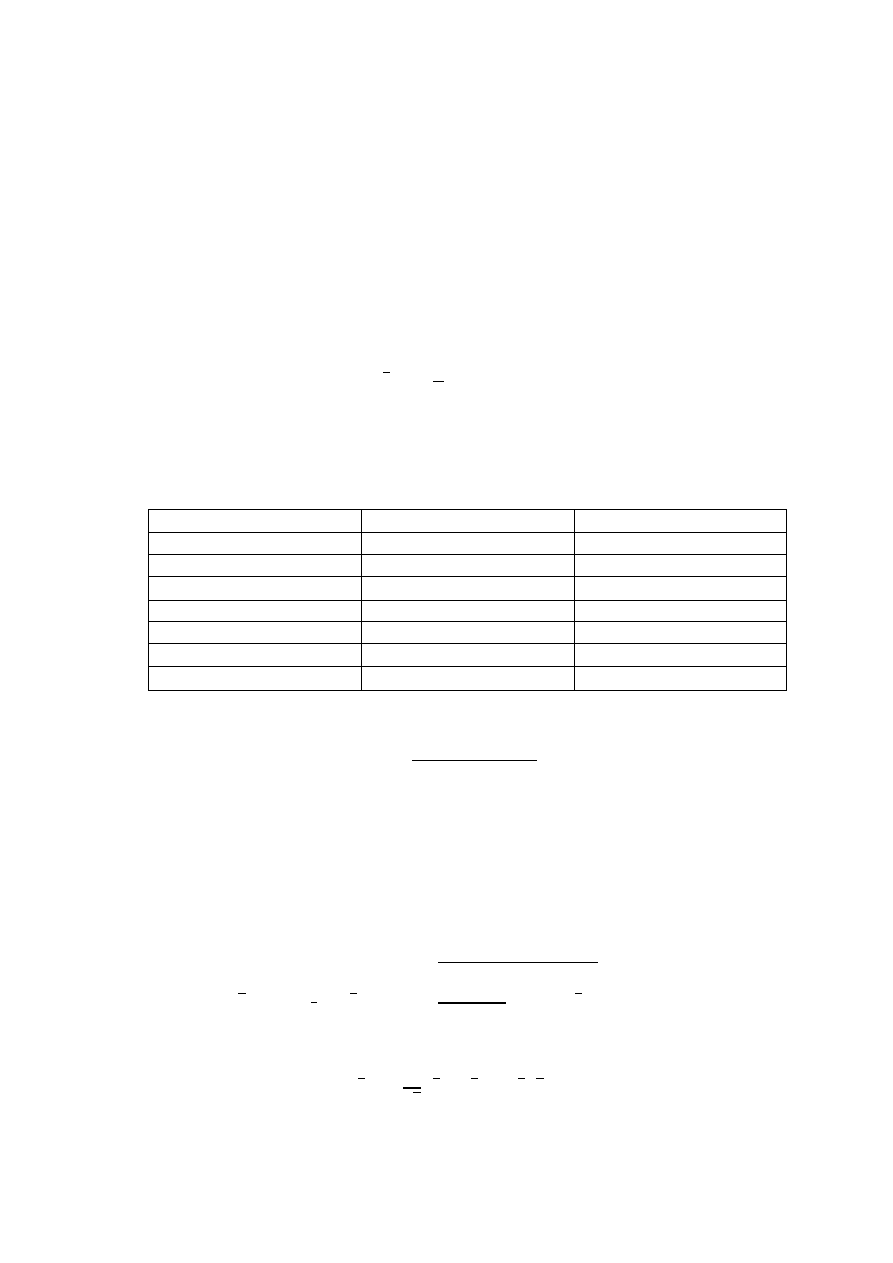
4. Wyniki.
a) Zależność t
2
od h:
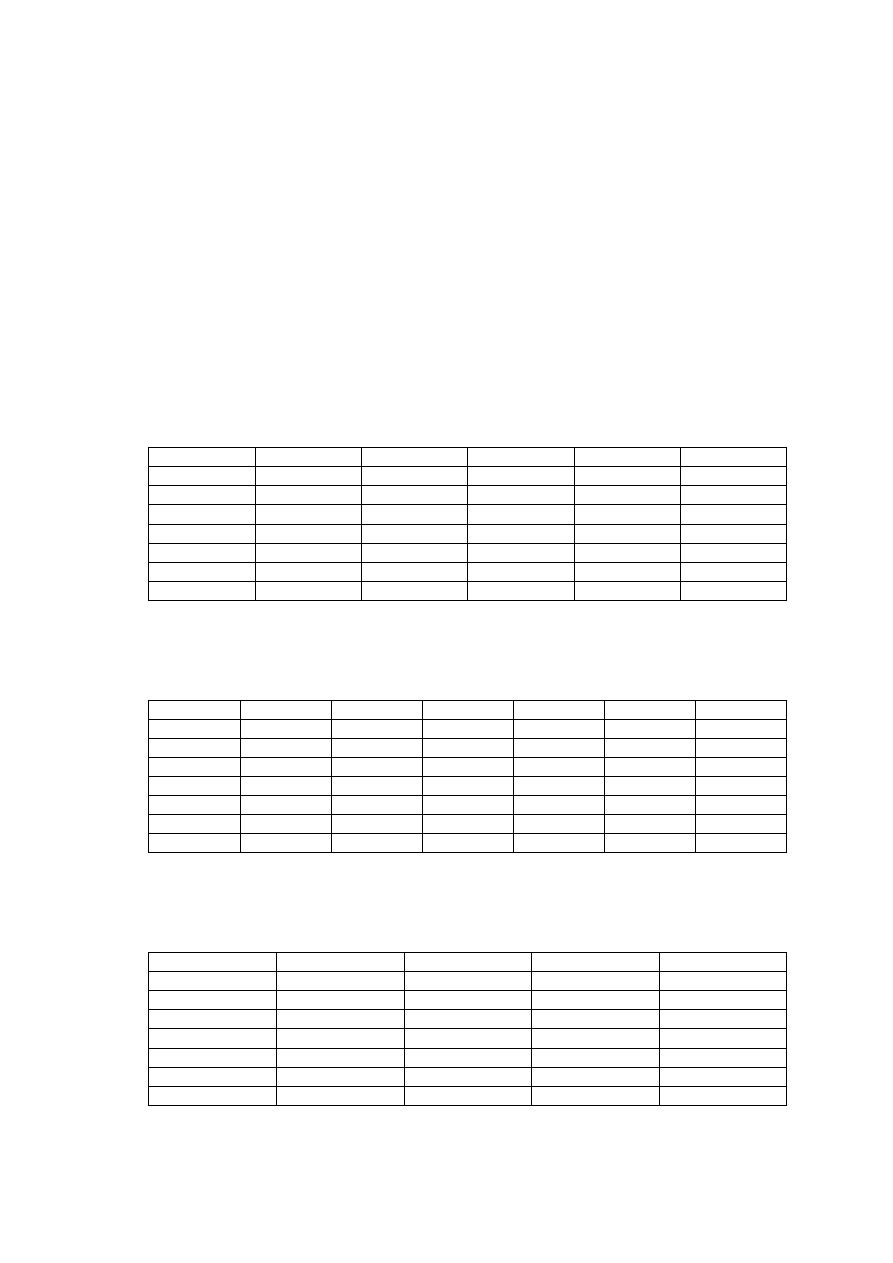
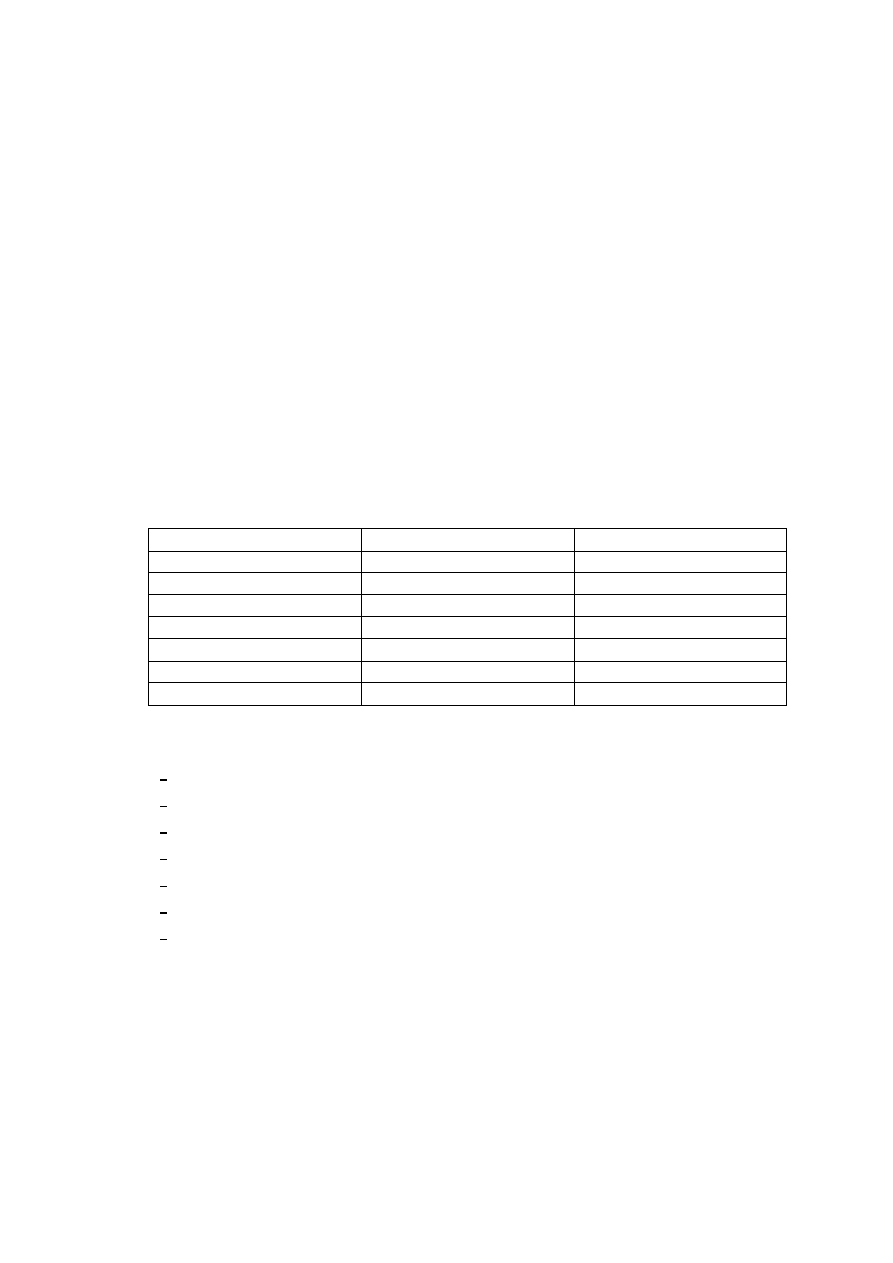
Tabela 1. Wyniki pomiarów dotyczących zależności t
2
od h.
L. p.
h
1
[m]
h
2
[m]
t
1
[s]
t
2
[s]
t
3
[s]
1
0,01
0,297
4,696
4,965
4,981
2
0,01
0,347
5,057
5,222
5,253
3
0,01
0,394
5,562
5,604
5,630
4
0,01
0,445
6,215
6,279
6,183
5
0,01
0,494
6,370
6,413
6,469
6
0,01
0,543
6,713
6,681
6,726
7
0,01
0,586
6,961
7,001
7,029
b) Zależność t
2
od d
W
2
:
Tabela 2. Wyniki pomiarów dotyczących zależności t
2
od d
W
2
.
L. p.
d [m]
H
W
[m]
r [m]
t
1
[s]
t
2
[s]
t
3
[s]
1
0,0516
0,0193
0,025
9,482
9,771
9,676
2
0,0812
0,0193
0,025
10,944
11,088
10,806
3
0,1113
0,0193
0,025
12,480
12,467
12,402
4
0,1430
0,0193
0,025
14,785
14,475
14,666
5
0,1700
0,0193
0,025
16,829
16,780
16,980
6
0,2000
0,0193
0,025
19,844
19,524
19,725
7
0,2300
0,0193
0,025
22,565
22,333
22,776
c) Zależność t
2
od 1/m:
Tabela 3. Wyniki pomiarów dotyczących zależności t
2
od 1/m.
L. p.
m [kg]
t
1
[s]
t
2
[s]
t
3
[s]
1
0,100
7,362
7,409
7,162
2
0,110
6,848
6,945
6,738
3
0,120
6,517
6,626
6,767
4
0,140
6,141
6,007
5,931
5
0,160
5,534
5,408
5,454
6
0,180
5,035
5,050
5,105
7
0,230
4,541
4,478
4,523
5. Opracowanie wyników.
a) Zależność t
2
od h.
Obliczono odległość między fotokomórkami (h) i kwadrat średniego czasu spadku
obciążnika (t
2
), na podstawie wzorów:
ℎ = ℎ
2
− ℎ
1
(4)
gdzie:
ℎ
1
– wysokość górnej fotokomórki, mierzona względem ziemi [m],
ℎ
2
– wysokość dolnej fotokomórki, mierzona względem ziemi [m].
𝑡
2
= (
1
𝑛
∑ 𝑡
𝑖
𝑛
𝑖=1
)
2
(5)
Wyniki obliczeń zebrano w Tabeli 4:
Tabela 4. Obliczone wartości t
2
i h.
L. p.
h [m]
t
2
[s
2
]
1
0,287
23,821
2
0,337
26,805
3
0,384
31,345
4
0,435
38,759
5
0,484
41,182
6
0,533
44,979
7
0,576
48,958
Obliczono niepewność odległości między fotokomórkami na podstawie wzoru:
∆ℎ = √(∆ℎ
1
)
2
+ (∆ℎ
2
)
2
(6)
gdzie:
∆ℎ
1
– niepewność wysokości górnej fotokomórki, mierzona względem ziemi [m],
∆ℎ
2
– niepewność wysokości dolnej fotokomórki, mierzona względem ziemi [m].
Obliczono niepewność kwadratu średniego czasu spadku obciążnika na podstawie
wzorów:
∆𝑡 = 𝑘 ∙ ∆𝑠
𝑡
+ ∆𝑡
𝑠𝑦𝑠
= 3 ∙ √
1
𝑛(𝑛 − 1)
∑(𝑡
𝑖
− 𝑡)
2
𝑛
𝑖=1
+ 0,001 (7)
∆𝑡
2
= |
𝜕
𝜕𝑡
(𝑡
2
) ∆𝑡| = 2𝑡∆𝑡 (8)
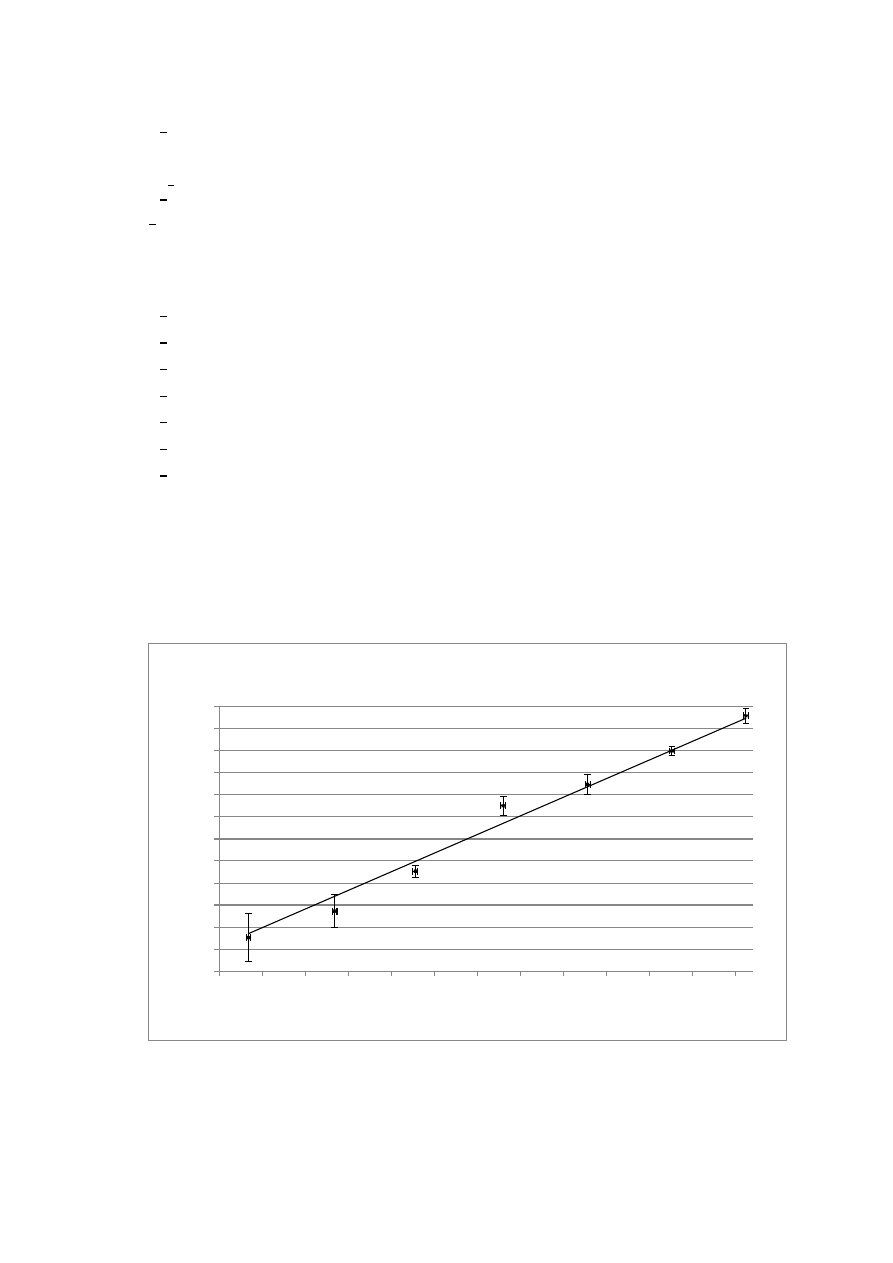
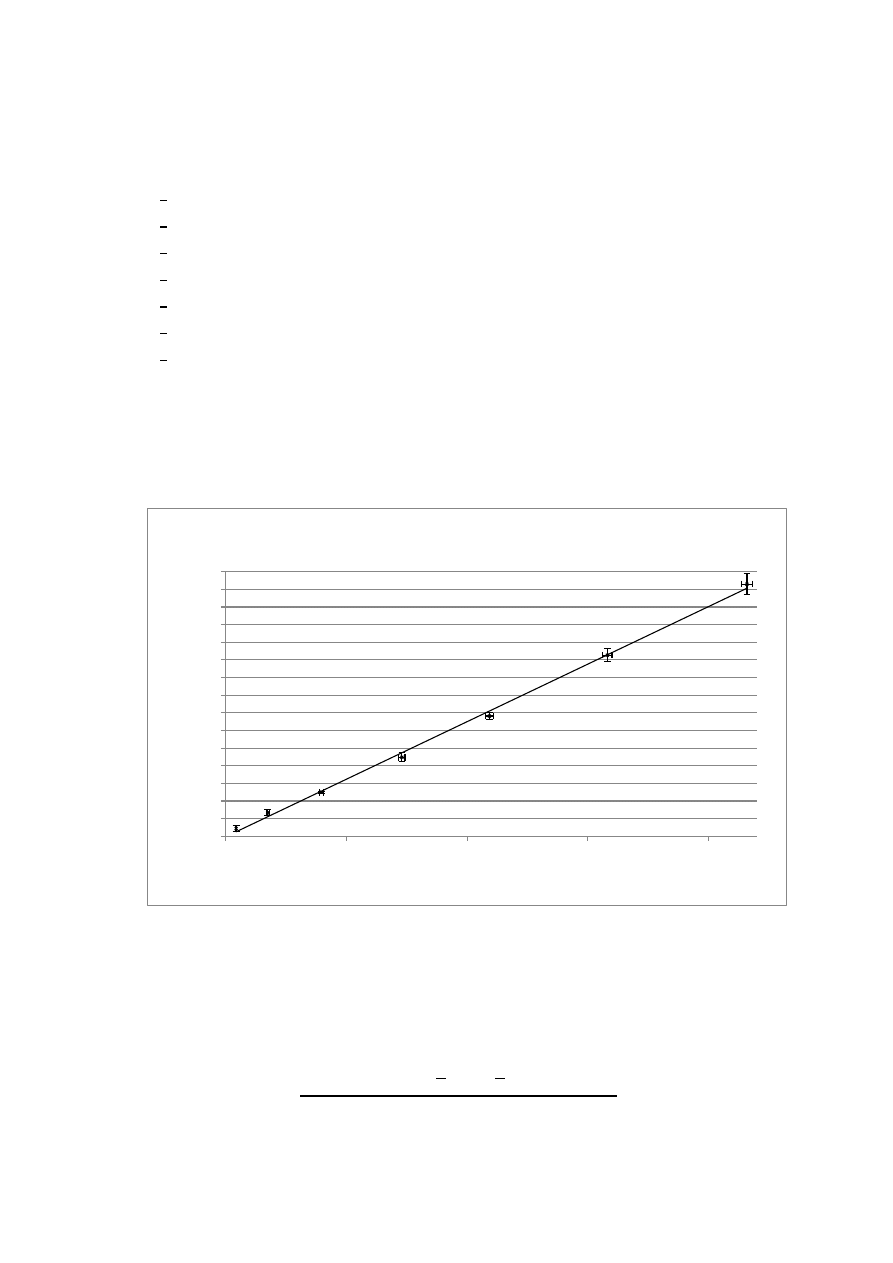
Wykres 1. Zależność t
2
od h.
gdzie:
∆𝑡 – niepewność średniego czasu spadku obciążnika [s],
𝑘 – współczynnik rozszerzenia,
∆𝑠
𝑡
– odchylenie standardowe średniej wyników [s],
∆𝑡
𝑠𝑦𝑠
– błąd systematyczny stopera [s],
𝑡 – średni czas spadku obciążnika [s].
∆ℎ
1
= ∆ℎ
2
= 0,001 𝑚
∆ℎ = 0,0014 𝑚
∆𝑡
1
2
= 2,717 𝑠
2
∆𝑡
2
2
= 1,900 𝑠
2
∆𝑡
3
2
= 0,677 𝑠
2
∆𝑡
4
2
= 1,067 𝑠
2
∆𝑡
5
2
= 1,116 𝑠
2
∆𝑡
6
2
= 0,551 𝑠
2
∆𝑡
7
2
= 0,842 𝑠
2
Sporządzono wykres zależności t
2
od h, dopasowano do niego linię trendu i
wyświetlono jej równanie, wyznaczono nie pewności pomiarowe współczynników
otrzymanej prostej, a także słupki błędów za pomocą arkusza kalkulacyjnego Excel
(funkcja REGLINP) i powyższych danych:
𝛼 = 84,52 𝑠
2
/𝑚
∆𝛼 = 1,00 𝑠
2
/𝑚
Wyznaczono moment bezwładności wahadła na podstawie wzoru (1) oraz uzyskanej
zależności liniowej:
y = 84.52x
20
23
25
28
30
33
35
38
40
43
45
48
50
0.270 0.295 0.320 0.345 0.370 0.395 0.420 0.445 0.470 0.495 0.520 0.545 0.570
t
2
[s
2
]
h [m]
Zależność t
2
od h
𝑦 = 𝛼𝑥 + 𝛽 (9)
gdzie:
𝛼 – współczynnik kierunkowy równania uzyskanej prostej [s
2
/m],
𝛽 – wyraz wolny równania uzyskanej prostej [m].
𝐼
𝑋
=
𝑚𝑟
2
(𝛼𝑔 − 2)
2
(10)
gdzie:
𝑚 – masa obciążnika [kg],
𝑟 – promień wahadła Oberbecka [m].
𝛼 – współczynnik kierunkowy równania uzyskanej prostej [s
2
/m],
𝑔 – przyspieszenie ziemskie [m/s
2
].
𝑚 = 0,1 𝑘𝑔
𝑟 = 0,0125 𝑚
𝛼 = 84,52 𝑠
2
/𝑚
𝑔 = 9,81 𝑚/𝑠
2
𝐼
𝑋
= 6,46 ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
Obliczono niepewność pomiaru momentu bezwładności na podstawie wzoru:
∆𝐼
𝑋
= |
𝜕𝐼
𝑋
𝜕𝑟
∆𝑟| + |
𝜕𝐼
𝑋
𝜕𝛼
∆𝛼| = 𝑚𝑟(𝛼𝑔 − 2)∆𝑟 +
𝑔𝑚𝑟
2
2
∆𝛼 (11)
gdzie:
𝑚 – masa obciążnika [kg],
𝑟 – promień wahadła Oberbecka [m].
𝛼 – współczynnik kierunkowy równania uzyskanej prostej [s
2
/m],
𝑔 – przyspieszenie ziemskie [m/s
2
],
∆𝑟 – niepewność promienia wahadła Oberbecka [m],
∆𝛼 – niepewność współczynnika kierunkowego równania uzyskanej prostej [s
2
/m].
𝑚 = 0,1 𝑘𝑔
𝑟 = 0,0125 𝑚
𝛼 = 84,52 𝑠
2
/𝑚
𝑔 = 9,81 𝑚/𝑠
2
∆𝑟 = 0,00005 𝑚
∆𝛼 = 1,00 𝑠
2
/𝑚
∆𝐼
𝑋
= 1,29 ∙ 10
−4
𝑘𝑔 ∙ 𝑚
2
Wynik końcowy:
𝐼
𝑋
= (6,46 ± 0,13) ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
b) Zależność t
2
od d
W
2
.
Obliczono kwadrat odległości między środkami ciężarków a środkiem wahadła (d
W
2
) i
kwadrat średniego czasu spadku obciążnika (t
2
), na podstawie wzorów (12), (5) i
Rysunku 1:
𝑑
𝑊
2
= (𝑑 −
1
2
𝐻
𝑊
−
1
2
∙ 2𝑟)
2
= (𝑑 −
1
2
𝐻
𝑊
− 𝑟)
2
(12)
gdzie:
𝑑 – odległość między ciężarkiem a wahadłem [m],
𝐻
𝑊
– wysokość ciężarka [m],
𝑟 – promień wahadła Oberbecka [m].
Wyniki obliczeń zebrano w Tabeli 5:
Tabela 5. Obliczone wartości t
2
i d
W
2
.
L. p.
d
W
2
[m]
t
2
[s
2
]
1
0,0009
92,987
2
0,0035
119,815
3
0,0079
154,994
4
0,0146
214,388
5
0,0219
284,361
6
0,0316
387,998
7
0,0432
508,863
Obliczono niepewności powyższych pomiarów na podstawie wzorów (7), (8) i (13):
∆𝑑
𝑊
2
= |
𝜕𝑑
𝑊
2
𝜕𝑑
∆𝑑| + |
𝜕𝑑
𝑊
2
𝜕𝐻
𝑊
∆𝐻
𝑊
| + |
𝜕𝑑
𝑊
2
𝜕𝑟
∆𝑟| =
= (2𝑑 − 𝐻
𝑊
− 2𝑟) (∆𝑑 +
1
2
∆𝐻
𝑊
+ ∆𝑟) (13)
gdzie:
𝑑 – odległość między ciężarkiem a wahadłem [m],
𝐻
𝑊
– wysokość ciężarka [m],
𝑟 – promień wahadła Oberbecka [m],
∆𝑑 – niepewność odległości między ciężarkiem a wahadłem [m],
∆𝐻
𝑊
– niepewność wysokości ciężarka [m],
∆𝑟 – niepewność promienia wahadła Oberbecka [m].
∆𝑑 = 0,001 𝑚
∆𝐻
𝑊
= ∆𝑟 = 0,00005 𝑚
∆(𝑑
𝑊
2
)
1
= 6,33 ∙ 10
−5
𝑚
∆(𝑑
𝑊
2
)
2
= 1,27 ∙ 10
−4
𝑚
∆(𝑑
𝑊
2
)
3
= 1,92 ∙ 10
−4
𝑚
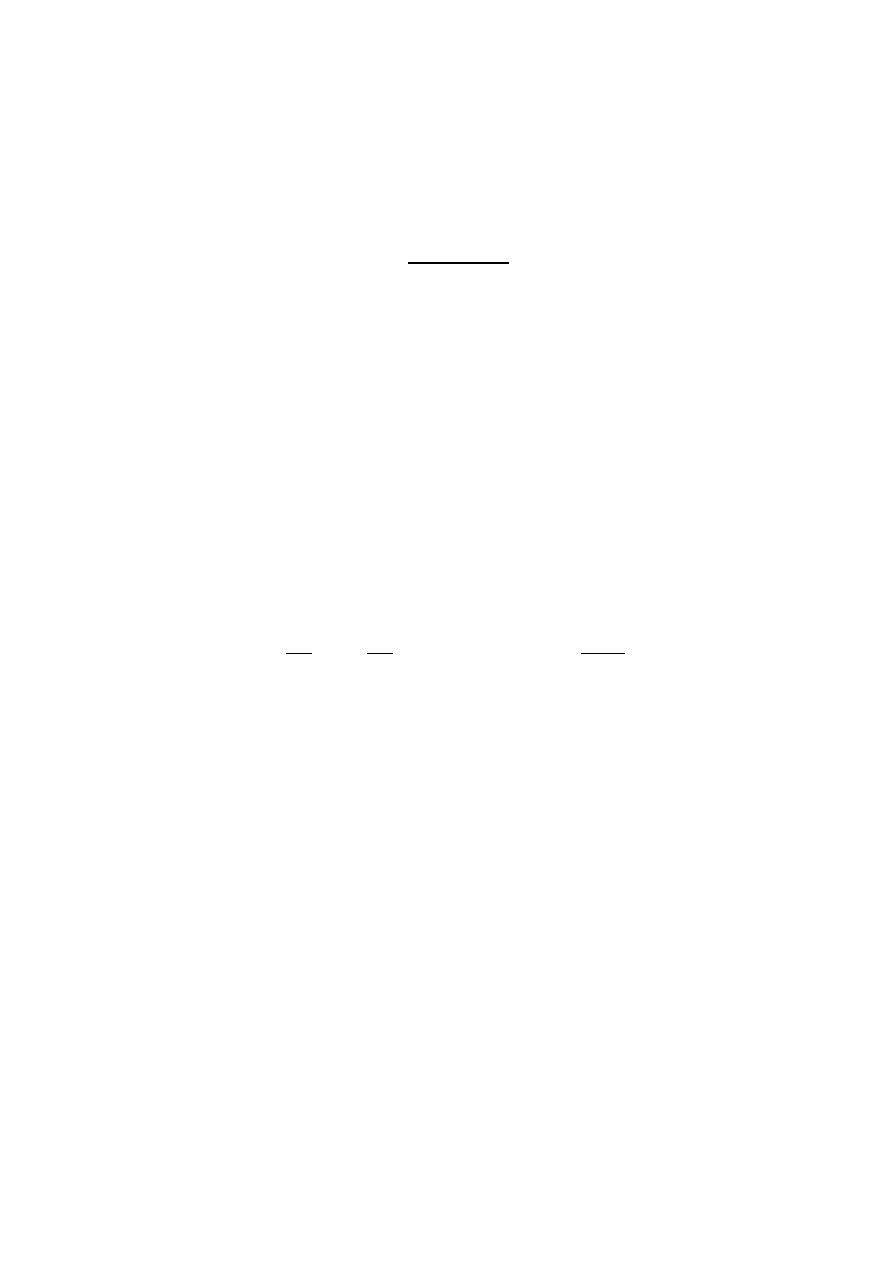
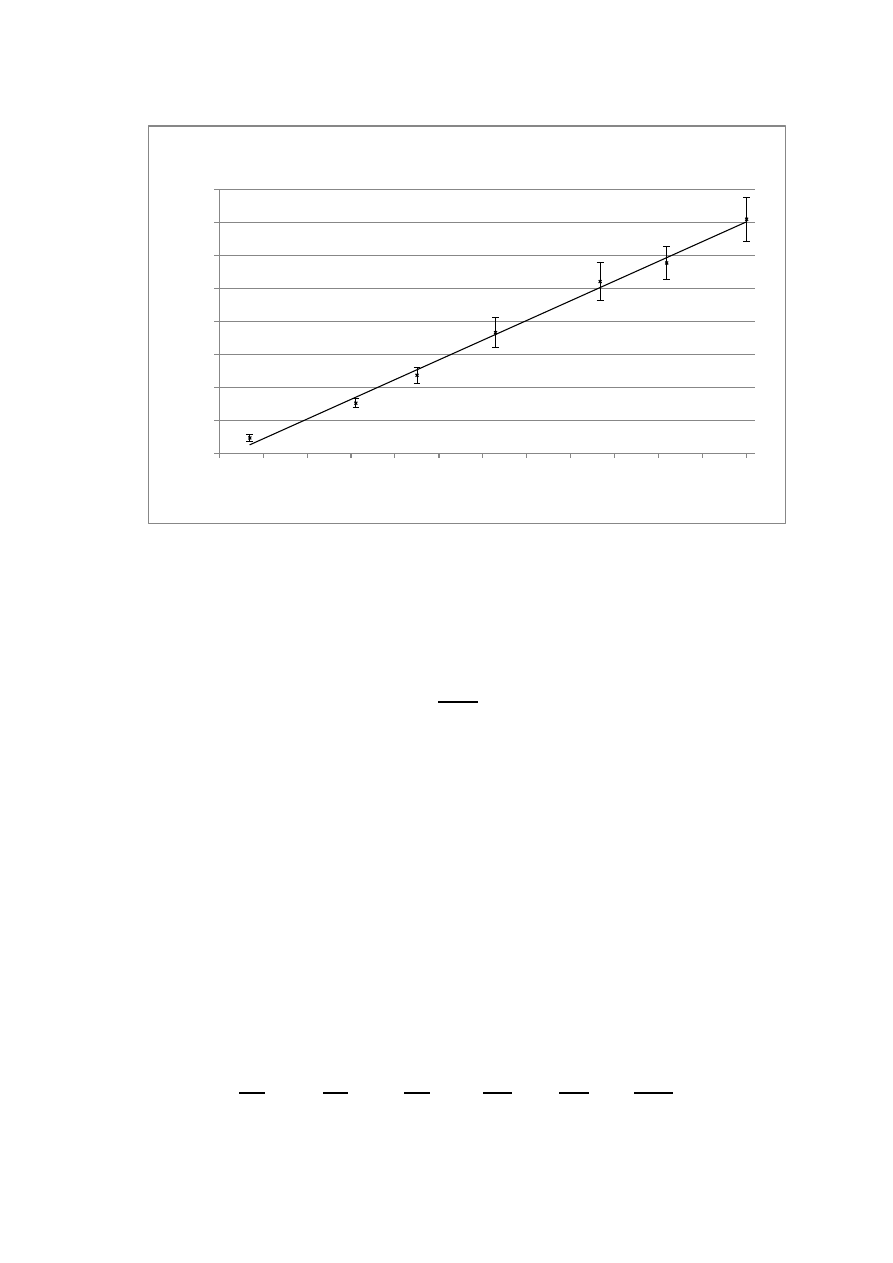
Wykres 2. Zależność t
2
od d
W
2
.
∆(𝑑
𝑊
2
)
4
= 2,60 ∙ 10
−4
𝑚
∆(𝑑
𝑊
2
)
5
= 3,18 ∙ 10
−4
𝑚
∆(𝑑
𝑊
2
)
6
= 3,82 ∙ 10
−4
𝑚
∆(𝑑
𝑊
2
)
7
= 4,47 ∙ 10
−4
𝑚
∆𝑡
1
2
= 4,490 𝑠
2
∆𝑡
2
2
= 5,369 𝑠
2
∆𝑡
3
2
= 1,827 𝑠
2
∆𝑡
4
2
= 7,961 𝑠
2
∆𝑡
5
2
= 6,123 𝑠
2
∆𝑡
6
2
= 11,076 𝑠
2
∆𝑡
7
2
= 17,360 𝑠
2
Sporządzono wykres t
2
od d
W
2
, dopasowano do niego linię trendu i jej równanie,
wyznaczono niepewności pomia rowe współczynników otrzymanej prostej, oraz słupki
błędów za pomocą arkusza kalkulacyjnego Excel (REGLINP) i powyższych danych:
𝛽 = 79,24 𝑠
2
∆𝛽 = 4,30 𝑠
2
Wyznaczono moment bezwładności wahadła na podstawie wzoru (2) oraz uzyskanej
zależności liniowej (9):
𝐼
𝑋
=
𝛽𝑚𝑔𝑟
2
− 2ℎ𝑀
𝑊
(
1
8 𝐷
𝑊
2
+
1
6 𝐻
𝑊
2
) − 2ℎ𝑚𝑟
2
2ℎ
(14)
y = 9779.7x + 79.236
80
110
140
170
200
230
260
290
320
350
380
410
440
470
500
530
0.00
0.01
0.02
0.03
0.04
t
2
[s
2
]
d
w
2
[m
2
]
Zależność t
2
od d
w
2

gdzie:
𝛽 – wyraz wolny równania uzyskanej prostej [s
2
],
𝑚 – masa obciążnika [kg],
𝑔 – przyspieszenie ziemskie [m/s
2
],
𝑟 – promień wahadła Oberbecka [m],
ℎ – odległość między fotokomórkami [m],
𝑀
𝑊
– masa ciężarka [kg],
𝐷
𝑊
– średnica ciężarka [m],
𝐻
𝑊
– wysokość ciężarka [m].
𝛽 = 79,24 𝑠
2
𝑚 = 0,1 𝑘𝑔
𝑔 = 9,81 𝑚/𝑠
2
𝑟 = 0,0125 𝑚
ℎ = 0,576 𝑚
𝑀
𝑊
= 0,25 𝑘𝑔
𝐷
𝑊
= 0,04675 𝑚
𝐻
𝑊
= 0,0193 𝑚
𝐼
𝑋
= 1,04 ∙ 10
−2
𝑘𝑔 ∙ 𝑚
2
Obliczono niepewność pomiaru momentu bezwładności na podstawie wzoru:
∆𝐼
𝑋
= |
𝜕𝐼
𝑋
𝜕𝛽
∆𝛽| + |
𝜕𝐼
𝑋
𝜕𝑟
∆𝑟| + |
𝜕𝐼
𝑋
𝜕ℎ
∆ℎ| + |
𝜕𝐼
𝑋
𝜕𝐷
𝑊
∆𝐷
𝑊
| + |
𝜕𝐼
𝑋
𝜕𝐻
𝑊
∆𝐻
𝑊
| =
=
𝑚𝑔𝑟
2
2ℎ
∆𝛽 + 𝑚𝑟 (
𝛽𝑔
ℎ
− 2) ∆𝑟 +
𝛽𝑚𝑔𝑟
2
2ℎ
2
∆ℎ +
𝑀
𝑊
𝐷
𝑊
4
∆𝐷
𝑊
+
𝑀
𝑊
𝐻
𝑊
3
∆𝐻
𝑤
(15)
gdzie:
𝛽 – wyraz wolny równania uzyskanej prostej [s
2
],
𝑚 – masa obciążnika [kg],
𝑔 – przyspieszenie ziemskie [m/s
2
],
𝑟 – promień wahadła Oberbecka [m],
ℎ – odległość między fotokomórkami [m],
𝑀
𝑊
– masa ciężarka [kg],
𝐷
𝑊
– średnica ciężarka [m],
𝐻
𝑊
– wysokość ciężarka [m],
∆𝛽 – niepewność wyrazu wolnego równania uzyskanej prostej [s
2
],
∆𝑟 – niepewność promienia wahadła Oberbecka [m],
∆ℎ – niepewność odległości między fotokomórkami [m],
∆𝐷
𝑊
– niepewność średnicy ciężarka [m],
∆𝐻
𝑊
– niepewność wysokości ciężarka [m].
𝛽 = 79,24 𝑠
2
𝑚 = 0,1 𝑘𝑔
𝑔 = 9,81 𝑚/𝑠
2
𝑟 = 0,0125 𝑚
ℎ = 0,576 𝑚
𝑀
𝑊
= 0,25 𝑘𝑔
𝐷
𝑊
= 0,04675 𝑚
𝐻
𝑊
= 0,0193 𝑚
∆𝛽 = 4,30 𝑠
2
∆𝑟 = ∆𝐷
𝑊
= ∆𝐻
𝑊
= 0,00005 𝑚
∆ℎ = 0,0014 𝑚
∆𝐼
𝑋
= 6,83 ∙ 10
−4
𝑘𝑔 ∙ 𝑚
2
Wynik końcowy:
𝐼
𝑋
= (1,04 ± 0,07) ∙ 10
−2
𝑘𝑔 ∙ 𝑚
2
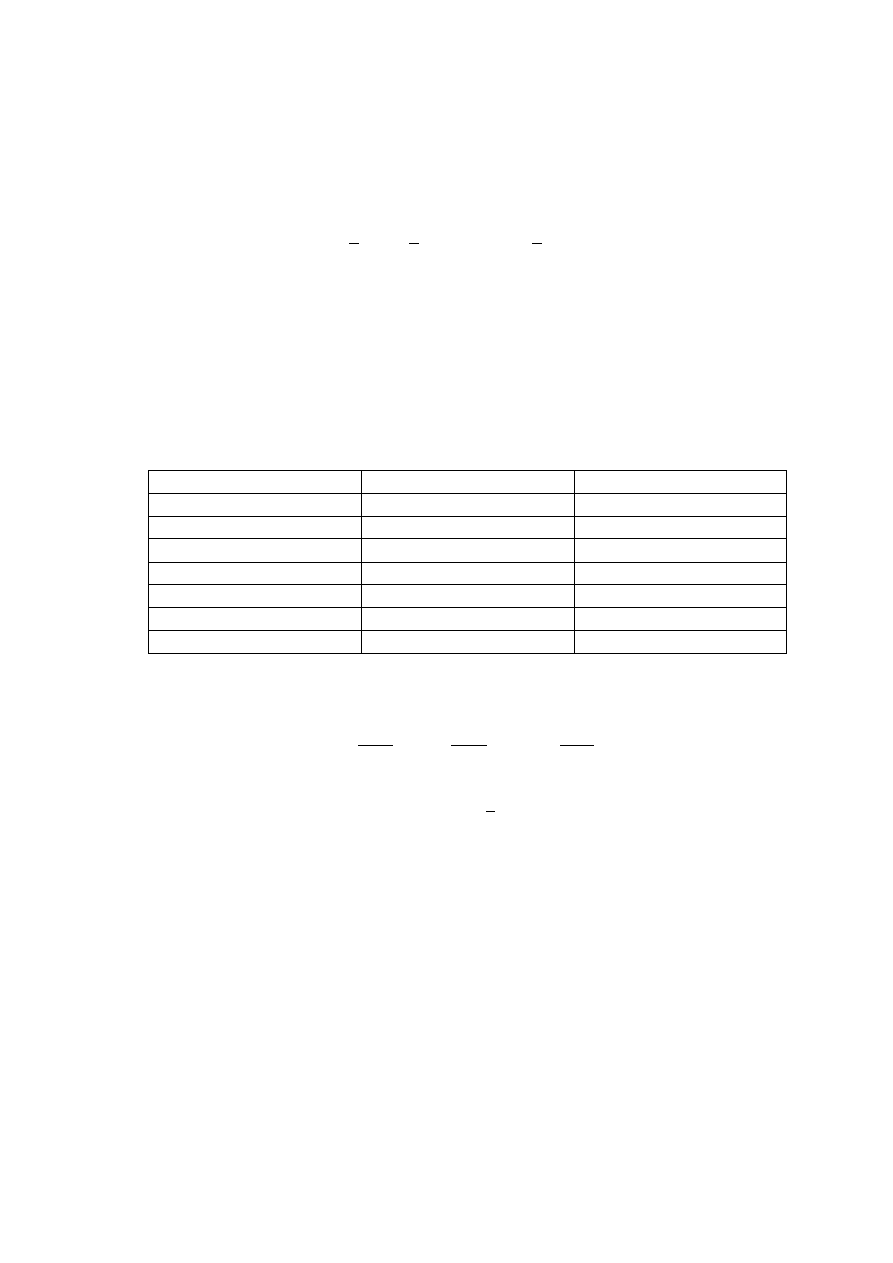
c) Zależność t
2
od 1/m.
Obliczono odwrotności mas ciężarków (1/m) i kwadrat średniego czasu spadku
obciążnika (t
2
), na podstawie wzoru (5) i zebrano w Tabeli 6:
Tabela 6. Obliczone wartości t
2
i 1/m.
L. p.
1/m [m]
t
2
[s
2
]
1
10,000
53,451
2
9,091
46,836
3
8,333
44,045
4
7,143
36,317
5
6,250
29,870
6
5,556
25,637
7
4,348
20,376
Obliczono niepewności powyższych pomiarów na podstawie wzorów (7) i (8):
∆𝑡
1
2
= 3,336 𝑠
2
∆𝑡
2
2
= 2,469 𝑠
2
∆𝑡
3
2
= 2,895 𝑠
2
∆𝑡
4
2
= 2,232 𝑠
2
∆𝑡
5
2
= 1,218 𝑠
2
∆𝑡
6
2
= 0,657 𝑠
2
∆𝑡
7
2
= 0,516 𝑠
2
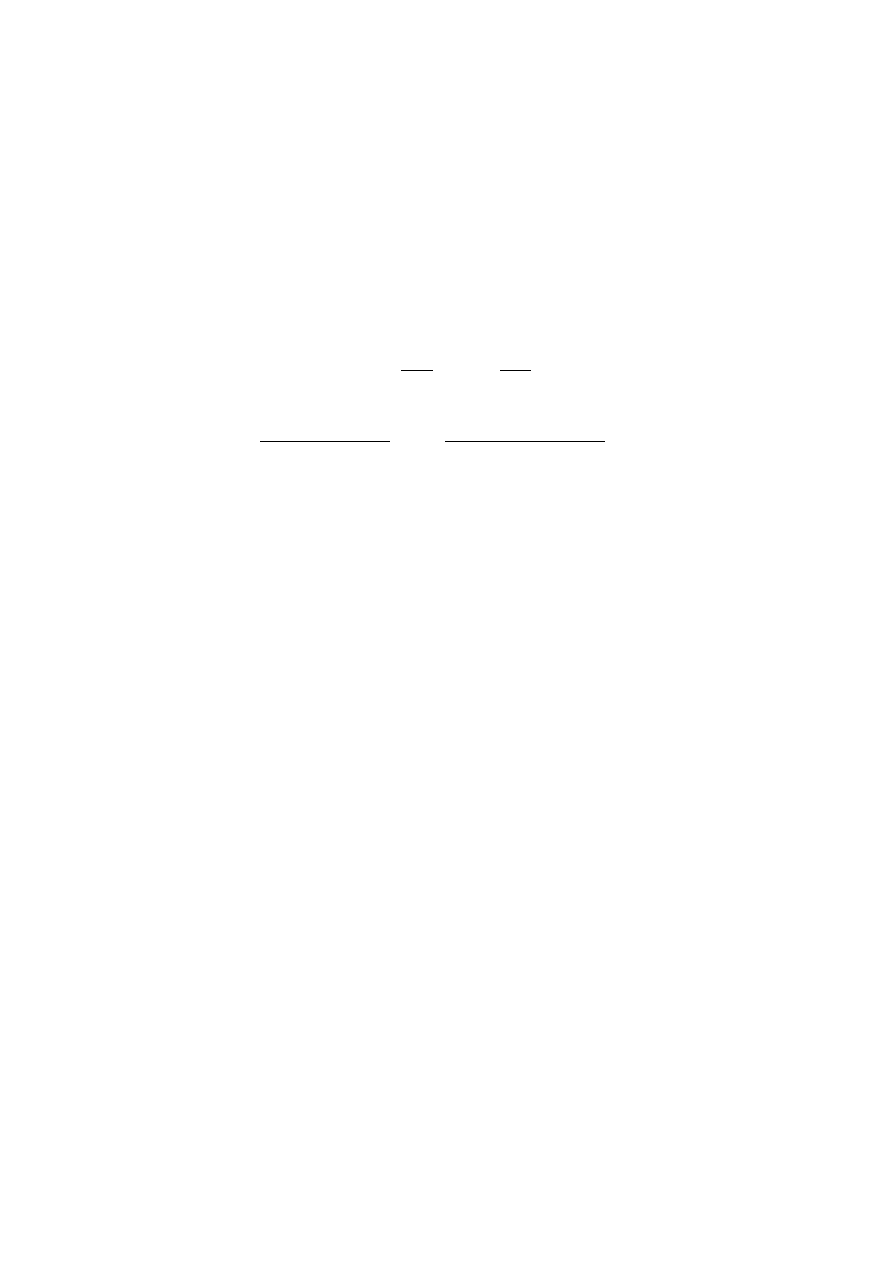
Sporządzono wykres zależności t
2
od 1/m, dopasowano do niego linię trendu i
wyświetlono jej równanie, wyznaczono niepewności pomiarowe współczynników
otrzymanej prostej, a także słupki błędów za pomocą arkusza kalkulacyjnego Excel
(funkcja REGLINP) i powyższych danych:
Wykres 3. Zależność t
2
od 1/m.
𝛼 = 5,96 𝑘𝑔 ∙ 𝑠
2
∆𝛼 = 0,19 𝑘𝑔 ∙ 𝑠
2
Wyznaczono moment bezwładności wahadła na podstawie wzoru (3) oraz uzyskanej
zależności liniowej (9):
𝐼
𝑋
=
𝛼𝑔𝑟
2
2ℎ
(16)
gdzie:
𝛼 – współczynnik kierunkowy równania uzyskanej prostej [s
2
/m],
𝑔 – przyspieszenie ziemskie [m/s
2
],
𝑟 – promień wahadła Oberbecka [m],
ℎ – odległość między fotokomórkami [m].
𝛼 = 5,96 𝑘𝑔 ∙ 𝑠
2
𝑔 = 9,81 𝑚/𝑠
2
𝑟 = 0,0125 𝑚
ℎ = 0,576 𝑚
𝐼
𝑋
= 7,93 ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
Obliczono niepewność pomiaru momentu bezwładności na podstawie wzoru:
∆𝐼
𝑋
= |
𝜕𝐼
𝑋
𝜕𝛼
∆𝛼| + |
𝜕𝐼
𝑋
𝜕𝑟
∆𝑟| + |
𝜕𝐼
𝑋
𝜕ℎ
∆ℎ| =
𝑔𝑟
2
2ℎ
∆𝛼 +
𝛼𝑔𝑟
ℎ
∆𝑟 +
𝛼𝑔𝑟
2
2ℎ
2
∆ℎ (17)
y = 5.9627x - 6.5571
18
23
28
33
38
43
48
53
58
4.0
4.5
5.0
5.5
6.0
6.5
7.0
7.5
8.0
8.5
9.0
9.5
10.0
t
2
[s
2
]
1/m [1/kg]
Zależność t
2
od 1/m

gdzie:
𝛼 – współczynnik kierunkowy równania uzyskanej prostej [s
2
/m],
𝑔 – przyspieszenie ziemskie [m/s
2
],
𝑟 – promień wahadła Oberbecka [m],
ℎ – odległość między fotokomórkami [m],
∆𝛼 – niepewność współczynnika kierunkowego równania uzyskanej prostej [s
2
/m],
∆𝑟 – niepewność promienia wahadła Oberbecka [m],
∆ℎ – niepewność odległości między fotokomórkami [m].
𝛼 = 5,96 𝑘𝑔 ∙ 𝑠
2
𝑔 = 9,81 𝑚/𝑠
2
𝑟 = 0,0125 𝑚
ℎ = 0,576 𝑚
∆𝛼 = 0,19 𝑘𝑔 ∙ 𝑠
2
∆𝑟 = 0,00005 𝑚
∆ℎ = 0,0014 𝑚
∆𝐼
𝑋
= 3,33 ∙ 10
−4
𝑘𝑔 ∙ 𝑚
2
Wynik końcowy:
𝐼
𝑋
= (7,93 ± 0,33) ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
d) Obliczony moment bezwładności wahadła.
Obliczono moment bezwładności nieobciążonego wahadła, traktując je jak walec,
obracający się względem osi prostopadłej do osi obrotowej, czyli korzystając ze wzoru
(18) i Rysunku 1.:
𝐼
𝑋
= 𝑀 (
3𝐷
𝑅
2
+ 4𝑑
𝑅
2
48
) (18)
oraz następujących zależności:
𝑀 = 𝜌𝑉 = 𝜌𝑑
𝑅
𝑆 = 𝜌𝜋𝑅
𝑅
2
𝑑
𝑅
=
𝜌𝜋𝐷
𝑅
2
𝑑
𝑅
4
(19)
Ostatecznie:
𝐼
𝑋
=
𝜌𝜋𝐷
𝑅
2
𝑑
𝑅
4
∙
3𝐷
𝑅
2
+ 4𝑑
𝑅
2
48
=
𝜌𝜋𝐷
𝑅
2
𝑑
𝑅
(3𝐷
𝑅
2
+ 4𝑑
𝑅
2
)
192
(20)
gdzie:
𝑀 – masa ramion wahadła Oberbecka [kg],
𝐷
𝑅
– średnica ramion wahadła Oberbecka [m],
𝑑
𝑅
– długość ramion wahadła Oberbecka [m],
𝜌 – gęstość materiału wahadła Oberbecka [kg/m
3
],
𝑉 – objętość ramion wahadła Oberbecka [m
3
],
𝑆 – pole powierzchni przekroju poprzecznego ramion wahadła Oberbecka [m
2
],
𝑅
𝑅
– promień ramion wahadła Oberbecka [m].
𝜌 = 2700 𝑘𝑔/𝑚
3
𝐷
𝑅
= 0,01 𝑚
𝑑
𝑅
= 0,6 𝑚
𝐼
𝑋
= 3,82 ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
Obliczono niepewność momentu bezwładności wahadła, na podstawie wzoru:
∆𝐼
𝑋
= |
𝜕𝐼
𝑋
𝜕𝑑
𝑅
∆𝑑
𝑅
| + |
𝜕𝐼
𝑋
𝜕𝐷
𝑅
∆𝐷
𝑅
| =
=
𝜌𝜋𝐷
𝑅
2
(𝐷
𝑅
2
+ 4𝑑
𝑅
2
)
64
∆𝑑
𝑅
+
𝜌𝜋𝐷
𝑅
𝑑
𝑅
(3𝐷
𝑅
2
+ 2𝑑
𝑅
2
)
48
∆𝐷
𝑅
(21)
gdzie:
𝜌 – gęstość materiału wahadła Oberbecka [kg/m
3
],
𝐷
𝑅
– średnica ramion wahadła Oberbecka [m],
𝑑
𝑅
– długość ramion wahadła Oberbecka [m],
∆𝐷
𝑅
– niepewność średnicy ramion wahadła Oberbecka [m],
∆𝑑
𝑅
– niepewność długości ramion wahadła Oberbecka [m].
𝜌 = 2700 𝑘𝑔/𝑚
3
𝐷
𝑅
= 0,01 𝑚
𝑑
𝑅
= 0,6 𝑚
∆𝑑
𝑅
= 0,01 𝑚
∆𝐷
𝑅
= 0,00005 𝑚
∆𝐼
𝑋
= 5,73 ∙ 10
−4
𝑘𝑔 ∙ 𝑚
2
Wynik końcowy:
𝐼
𝑋
= (3,82 ± 0,57) ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
6. Omówienie wyników i podsumowanie.
Ostatecznie otrzymano następujące momenty bezwładności:
𝐼
𝑋
= (6,46 ± 0,13) ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
𝐼
𝑋
= (1,04 ± 0,07) ∙ 10
−2
𝑘𝑔 ∙ 𝑚
2
𝐼
𝑋
= (7,93 ± 0,33) ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
𝐼
𝑋
= (3,82 ± 0,57) ∙ 10
−3
𝑘𝑔 ∙ 𝑚
2
Jak widać tylko drugi wynik (zależność t
2
od d
W
2
) znacznie odbiega od reszty – jest o rząd
wielkości większy od pozostałych. Pozostałe wyniki są zgodne z wartością obliczoną
momentu bezwładności wahadła Oberbecka (ostatni wynik). Wszystkie trzy zależności
wykazują bardzo dobrą liniowość, co jest widoczne na załączonych wykresach.
Ogromny wpływ na wyniki pomiarów, a mianowicie – czasy wskazywane przez stoper –
miały dwa elementy ćwiczenia. Pierwszy to wprawienie wahadła Oberbecka w ruch w

odpowiednim i za każdym razem tym samym momencie, to znaczy tak, aby stoper ruszył
w momencie zwolnienia wahadła. Było to bardzo trudne do wykonania i czasochłonne w
porównaniu do pozostałych elementów ćwiczenia. Duży wpływ na wyniki miało również
wzajemne ułożenie fotokomórek na statywie. Ze względu na nierównoległe ułożenie
fotokomórek pierwsza seria pomiarów została całkowicie odrzucona i ćwiczenie
rozpoczęto od początku. W dalszych etapach ćwiczenia eliminowano ten błąd poprzez
sprawdzenie, co jakiś czas, pozycji fotokomórek. Pozostałe czynniki mające wpływ na
niepewności pomiarowe to: niedoskonałość ludzkiego oka podczas odczytywania
odpowiednich długości czy odległości, założenie, że masy ciężarków i obciążników są
dokładne, wpływ bloczka na pracę układu i rozciągliwość nici, na której były zawieszone
ciężarki.
7. Literatura.
[1] A. Magiera, I Pracownia Fizyczna, IF UJ, Kraków 2010.
[2] D. Halliday, R. Resnick, J. Walker, Podstawy Fizyki 1, PWN, Warszawa 2003.
8. Załączniki.
Kserokopia wyników pomiarowych.
Wyszukiwarka
Podobne podstrony:
Laboratorium sprawozdanie 03 id 261439
sprawozdanie 03, sem 3, Podstawy elektrotechniki i elektroniki, Laboratoria, sprawodzania 2011 zima
Laboratorium sprawozdanie 11
Laboratorium sprawozdania cz. 3, Mechanika III semestr, Fizyka, Laboratoria i sprawozdania
Laboratorium sprawozdania cz. 3, Mechanika III semestr, Fizyka, Laboratoria i sprawozdania
sprawozdanie M6, Fizyka, Laboratoria, Sprawozdania, Sprawozdania cd, 1
CHEMIA - LABORATORIUM - SPRAWOZDANIE - Klasyfikacja połączeń nieorganicznych - wersja 2, STUDIA
Spr. 4-Materiałoznawstwo, Politechnika Poznańska ZiIP, II semestr, nom, Laboratoria-sprawozdania NOM
Filtracja - sprawozdanie 1, Biotechnologia PWR, Semestr 7, Separacje i oczyszczanie bioproduktów - L
Ćw[1]. 04 - Stale narzędziowe, Politechnika Poznańska ZiIP, II semestr, nom, Laboratoria-sprawozdani
Laboratorium sprawozdanie 04 id 261441
CHEMIA - LABORATORIUM - SPRAWOZDANIE - Wyznaczanie przewodnictwa granicznego elektrolitów, STUDIA
stała plancka(w2), Fizyka, Laboratoria, Sprawozdania
Laboratorium sprawozdanie 07 2
więcej podobnych podstron