Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Pomiar obci
ąż
enia
Laboratorium z Miernictwa
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Rodzaje przetworników stosowanych
do okre
ś
lenia obci
ąż
enia
• przetworniki siły i masy,
• przetworniki ci
ś
nienia,
• przetworniki momentu,
• akcelerometry,
• inne.
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Czujniki siły i masy
mog
ą
by
ć
stosowane do przetwarzania wymienionych wielko
ś
ci fizycznych w torach
pomiarowych układów o dowolnym przeznaczeniu. Czujniki mog
ą
by
ć
obci
ąż
ane siłami
ś
ciskaj
ą
cymi lub rozci
ą
gaj
ą
cymi, statycznymi i dynamicznymi o wielko
ś
ci odpowiedniej do typu i
zakresu przetwornika pomiarowego.
Czujniki składaj
ą
si
ę
z ła
ń
cucha pomiarowego zawieraj
ą
cego element wprowadzaj
ą
cy sił
ę
,
mechanicznego korpusu odkształcalnego, przetwornika mechano-elektrycznego (tensometru,
elementu
piezokwarcowego)
przetwarzaj
ą
cego
mechaniczne
napr
ęż
enia
w
korpusie
odkształcalnym w elektrycznie mierzalne sygnały i nast
ę
puj
ą
cego po nim wzmacniacza
elektrycznego opracowuj
ą
cego sygnał pomiarowy. Mnogo
ść
ró
ż
nych korpusów odkształcalnych
dostosowana jest do ró
ż
norodno
ś
ci zada
ń
pomiarowych.
Sposób działania korpusów odkształcalnych mo
ż
na najlepiej przybli
ż
y
ć
funkcjonowaniem
spr
ęż
yny gi
ę
tkiej. Mierzona siła wytwarza miejscowe napr
ęż
enia i deformacje korpusu czujnika.
Dla zapobie
ż
enia nieliniowo
ś
ciom odkształcenia korpusu minimalizowane s
ą
konstrukcyjnie
(du
ż
a sztywno
ść
). Tak osi
ą
ga si
ę
daleko id
ą
c
ą
proporcjonalno
ść
. W zale
ż
no
ś
ci od aplikacji
stosuje si
ę
ró
ż
ne konstrukcje zale
ż
ne od zastosowanego kształtu korpusu i materiału. Niektóre
typowe korpusy to zginane sztaby, podwójne belki i czujniki membranowe.
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
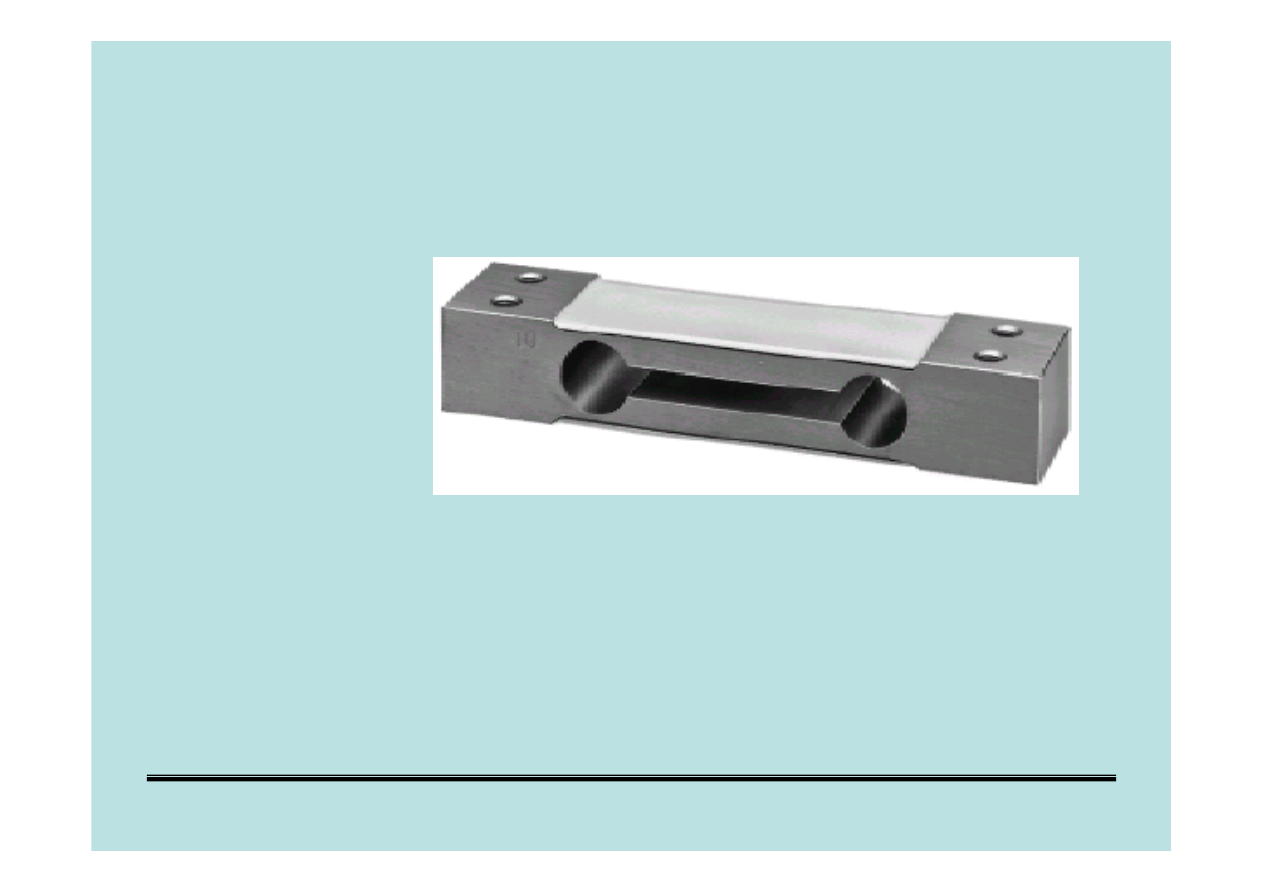
Przykłady czujników siły
Czujniki z pr
ę
tem zginanym lub belk
ą
rys., s
ą
najta
ń
sze ze wzgl
ę
du na łatw
ą
konstrukcj
ę
.
Zakres rozci
ą
gania tych czujników jest stosunkowo mały i przez to konstrukcje te s
ą
bardzo czułe na przemieszczanie punktu przyło
ż
enia siły. Czujniki belkowe s
ą
w
ogólno
ś
ci przeznaczone raczej do małych zakresów sił.
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
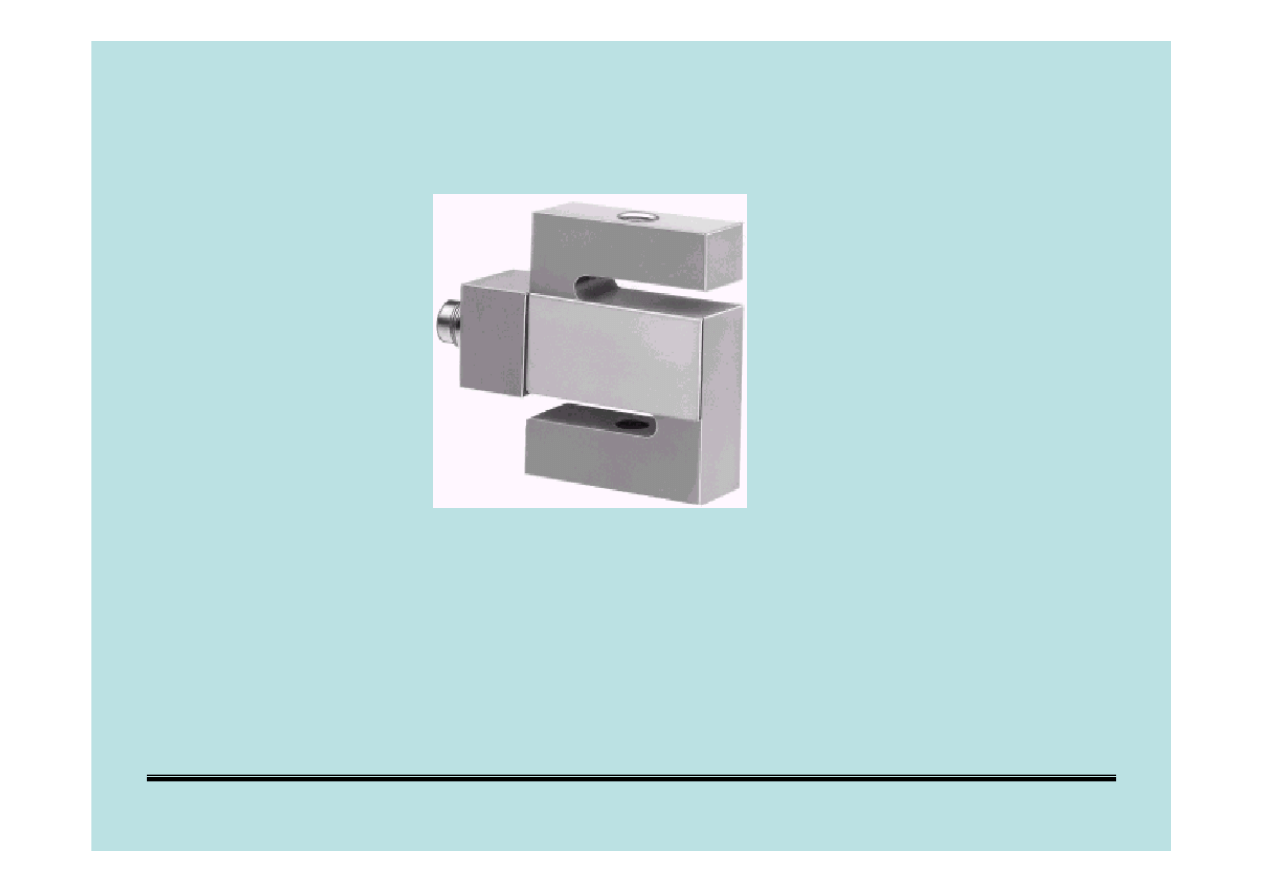
Przykłady czujników siły – cd.
Daleko szerszy zakres uzyskuje si
ę
przy belce podwójnej rys. Obszary
ś
ciskania i
rozci
ą
gania s
ą
wi
ę
ksze, co osi
ą
gni
ę
to przez zrównoleglenie belek. Zasada ta stosowana
jest te
ż
w zmodyfikowanej postaci w U-kształtnych i S-kształtnych korpusach.
Jedn
ą
z zalet tej konstrukcji jest odporno
ść
na zakłócaj
ą
cy wpływ punktu przyło
ż
enia siły.
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Dla wi
ę
kszych zakresów sił zamiast belki stosuje si
ę
konstrukcje, w których działaj
ą
siły
ś
cinaj
ą
ce (ze wzgl
ę
du na wi
ę
ksz
ą
sztywno
ść
).
Poprzez dwustronne wybranie materiału korpusu odkształceniowego uformowano
mostek, na który nakleja si
ę
tensometry. Przyło
ż
ona do przetwornika siła napr
ęż
a
mostek (
ś
cina) i rozci
ą
ga lub
ś
ciska tensometr.
Przykłady czujników siły – cd.
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Bardzo
wysok
ą
dokładno
ść
osi
ą
ga
si
ę
przy
czujnikach
membranowych, gdy
ż
zoptymalizowany jest odst
ę
p pomi
ę
dzy
punktem przyło
ż
enia siły, a zwielokrotnionym obszarem z
tensometrami. Taka wielokrotna belka pomiarowa w du
ż
ym
stopniu odporna jest na zakłócaj
ą
ce sygnały, gdy
ż
sygnały z
pojedynczych komórek pomiarowych s
ą
u
ś
redniane. Dla bardzo
du
ż
ych
obci
ąż
e
ń
stosuje
si
ę
zamkni
ę
te
oraz
podzielone
membrany charakteryzuj
ą
ce si
ę
du
żą
sztywno
ś
ci
ą
.
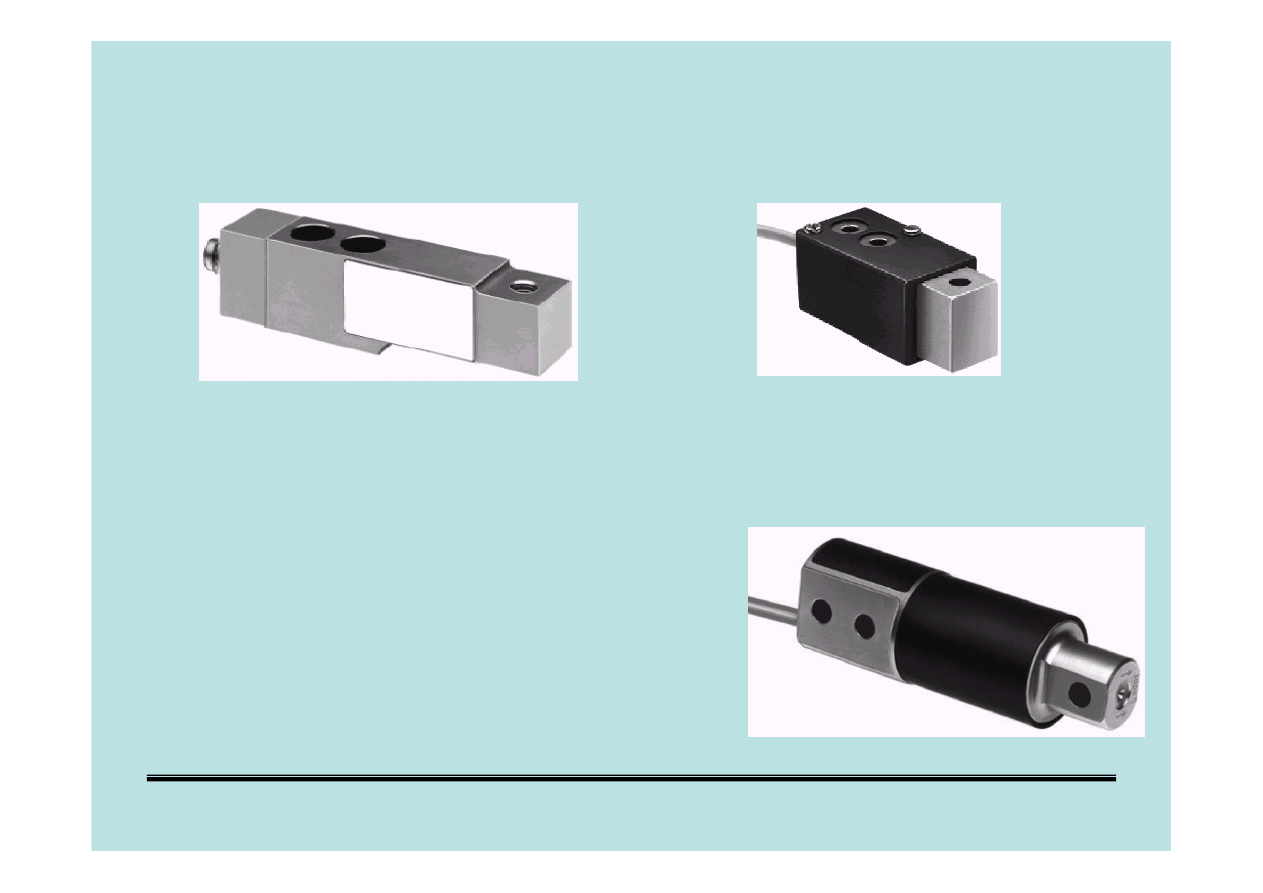
Przykłady czujników siły – cd.
Ró
ż
norodno
ść
kształtu i sposobu mocowania

Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
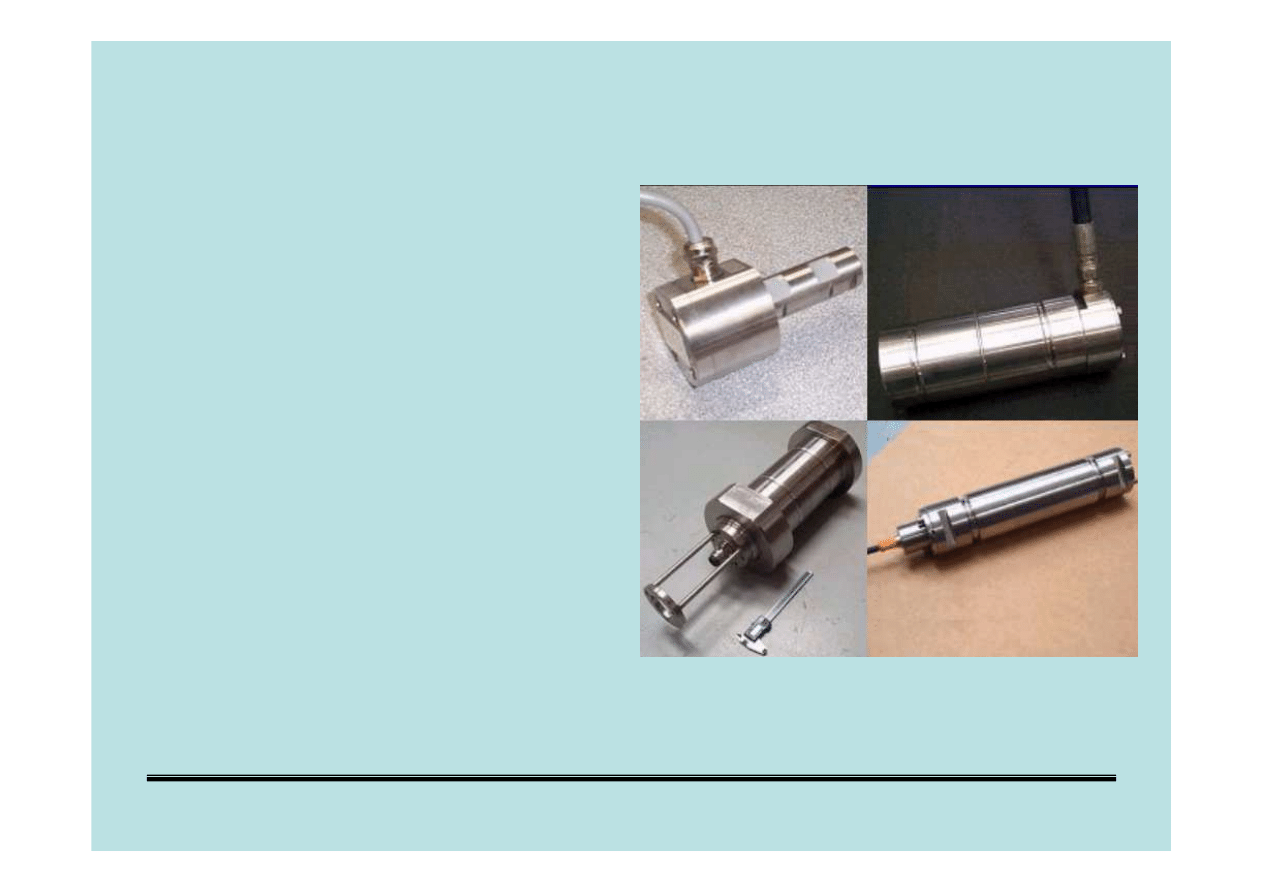
Przykłady czujników siły – cd.
Czujniki do pomiaru obci
ąż
enia firmy Greer
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Przykłady czujników siły – cd.
Bezprzewodowy czujnik do
pomiaru obci
ąż
enia
Load Systems
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
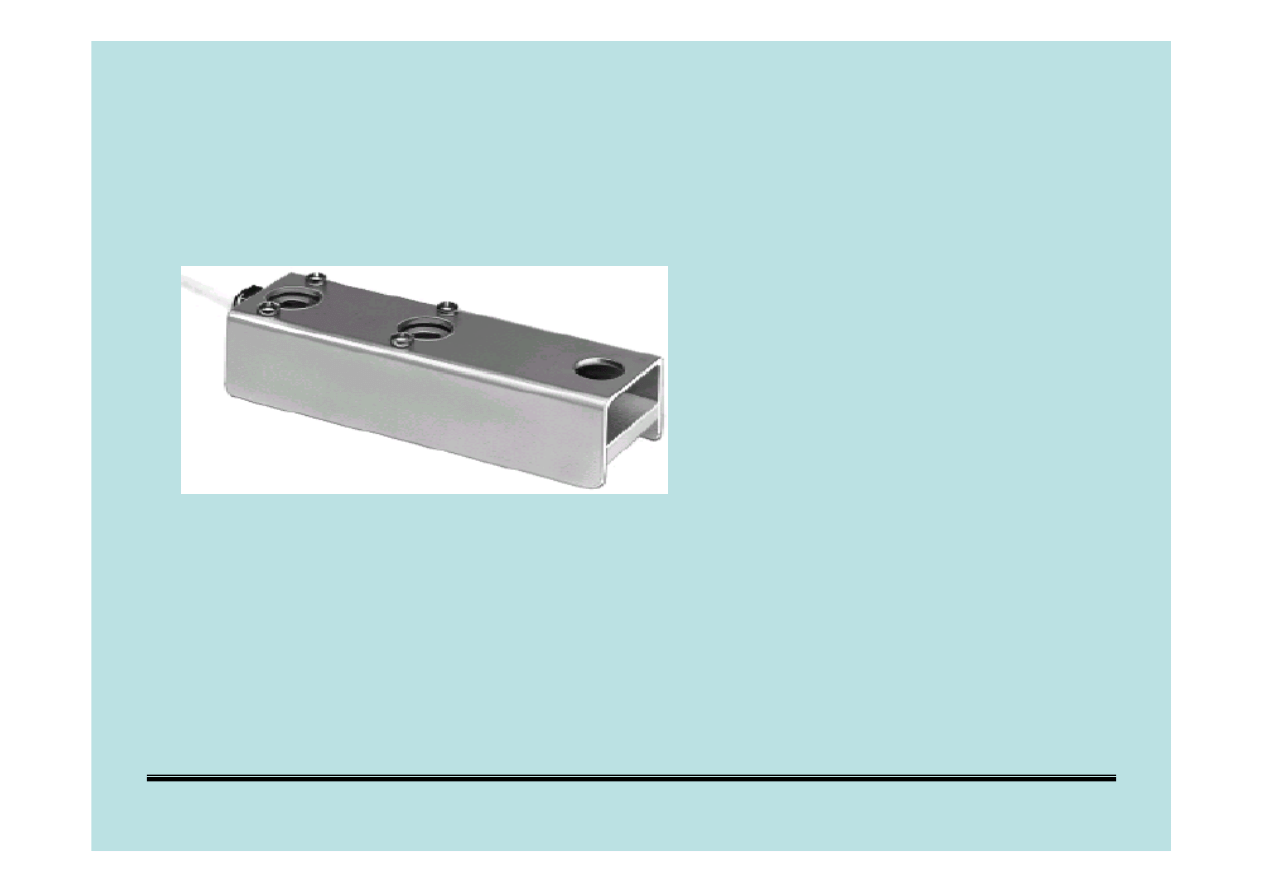
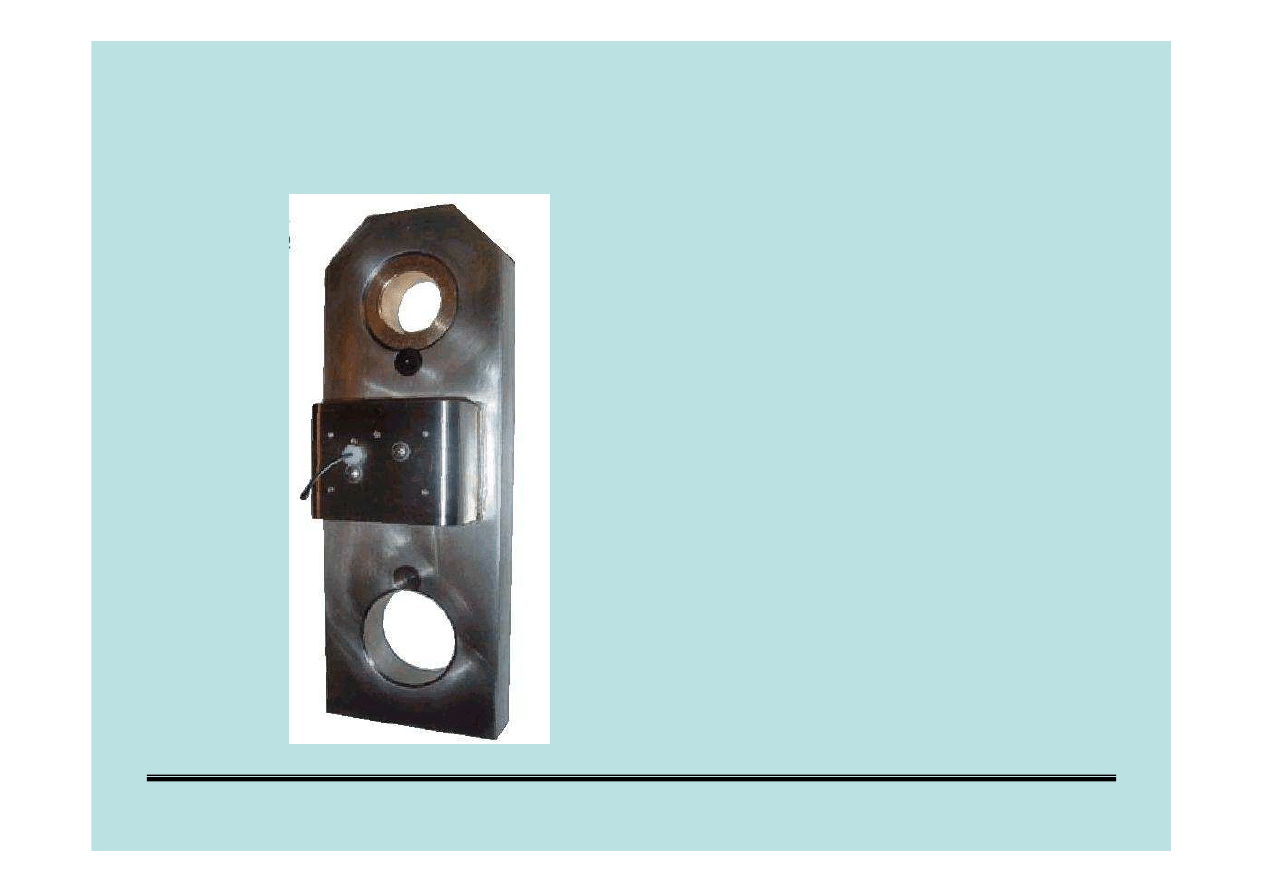
Przykłady czujników siły – cd.
Czujniki siły Magtrol
Sworznie mierz
ą
ce obci
ąż
enie
pracuj
ą
ce na
ś
cinanie
umieszczane s
ą
w miejsce
normalnych elementów na
maszynie i u
ż
ywane do pomiaru
obci
ąż
enia i wykrywania
przeci
ąż
e
ń
.
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
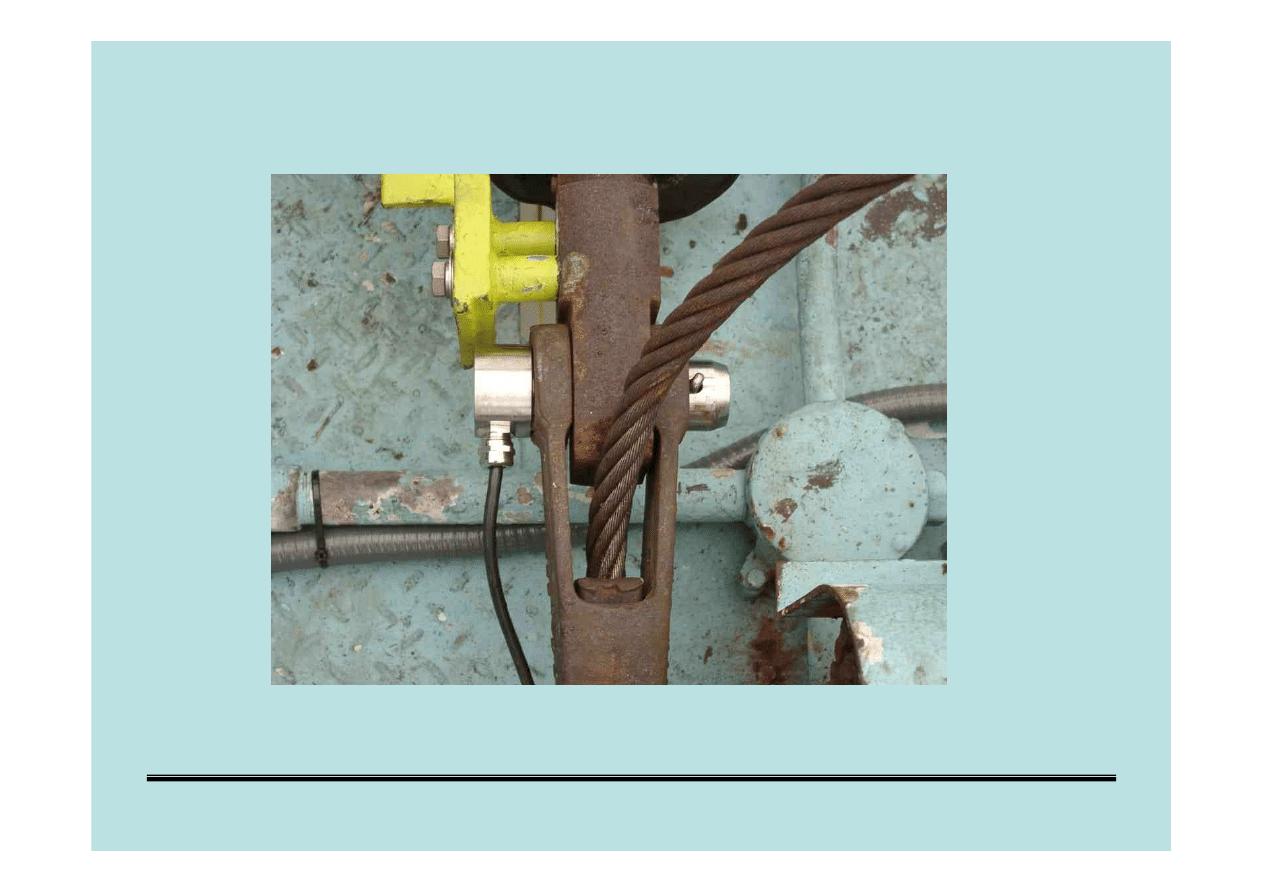
Zainstalowanie czujników siły na maszynie
Czujnik siły zainstalowany na maszynie

Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Czujniki ci
ś
nienia
Czujniki ci
ś
nienia – przeznaczone s
ą
do przetwarzania ci
ś
nie
ń
cieczy,
par i gazów na sygnały elektryczne i mog
ą
by
ć
stosowane w torach
pomiarowych układów mierz
ą
cych, diagnostycznych i steruj
ą
cych,
regulatorach i innych urz
ą
dzeniach.
Czujniki ci
ś
nienia składaj
ą
si
ę
w podstawowej swej zabudowie z
korpusu
pomiarowego
z
przył
ą
czem
ci
ś
nienia,
elementu
odkształcalnego
(np.
membrany
pomiarowej)
z
przetwornikiem
mechano-elektrycznym
oraz
z
elektronicznego
wzmacniacza
pomiarowego.
Mechaniczna zabudowa korpusu czujnika ci
ś
nienia jest zale
ż
na m.in.
od warunków otoczenia i zastosowanej technologii przetwornika
mechano-elektrycznego.
Najcz
ęś
ciej
stosuje
si
ę
przetworniki
tensometryczne
lub
piezokwarcowe.
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
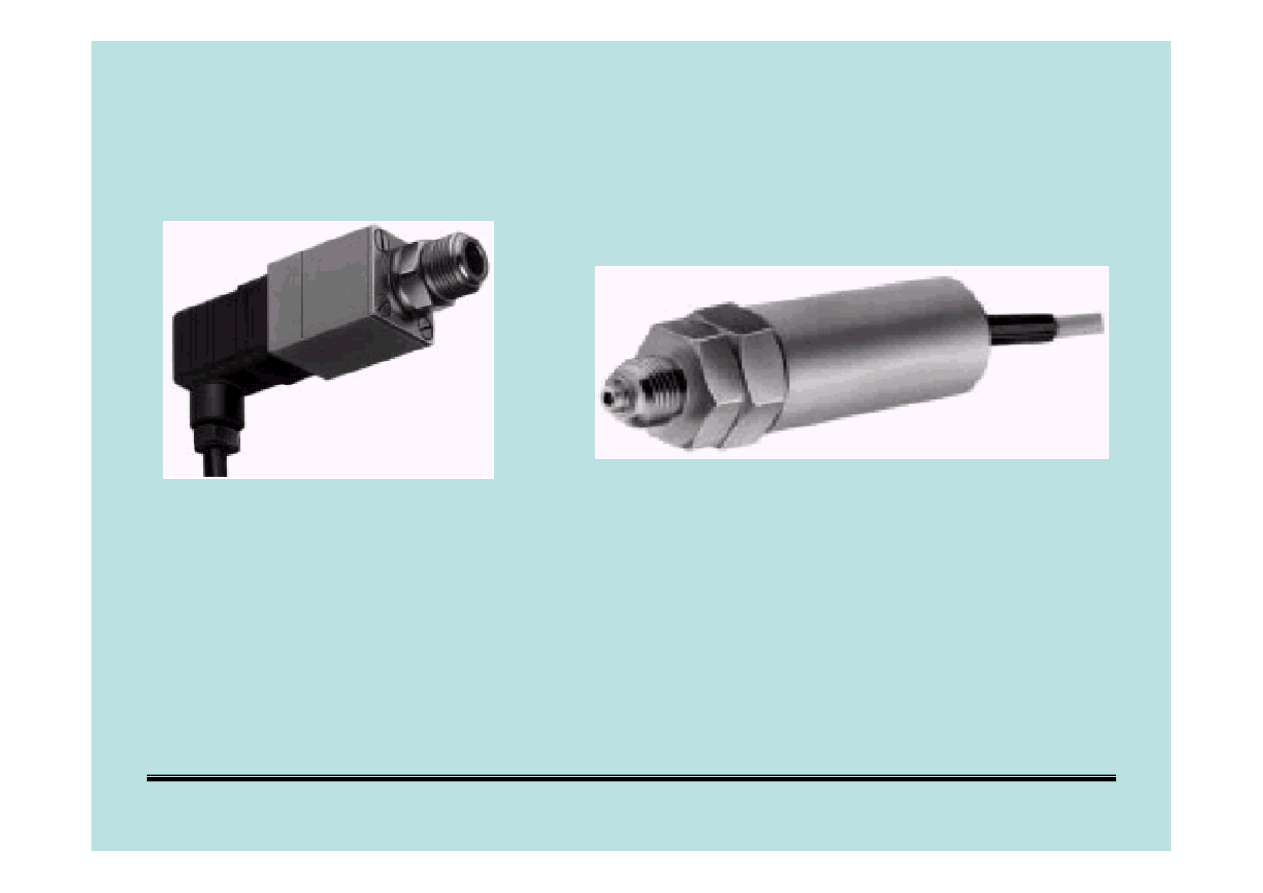
Czujniki ci
ś
nienia
Czujniki ci
ś
nienia z korpusem pomiarowym metalowym
i przetwornikiem tensometrycznym
Układ elektroniczny zawiera człony regulacyjne i kompensacyjne dla wyeliminowania
wpływów temperatury i dla osi
ą
gni
ą
cia symetrii mostka pomiarowego

Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Przetworniki mechano-elektryczne
• tensometry,
• elementy piezoelekttryczne,
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
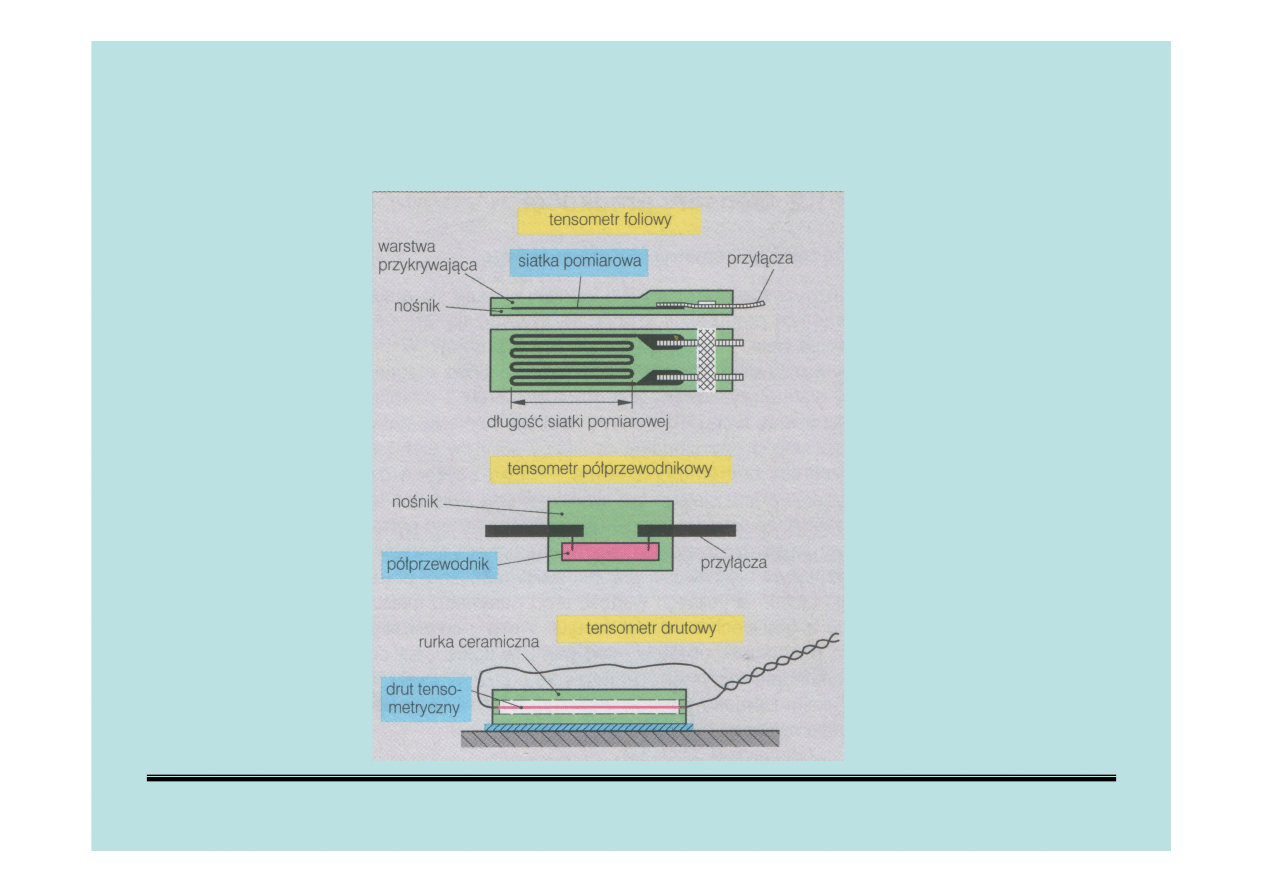
Rodzaje tensometrów
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
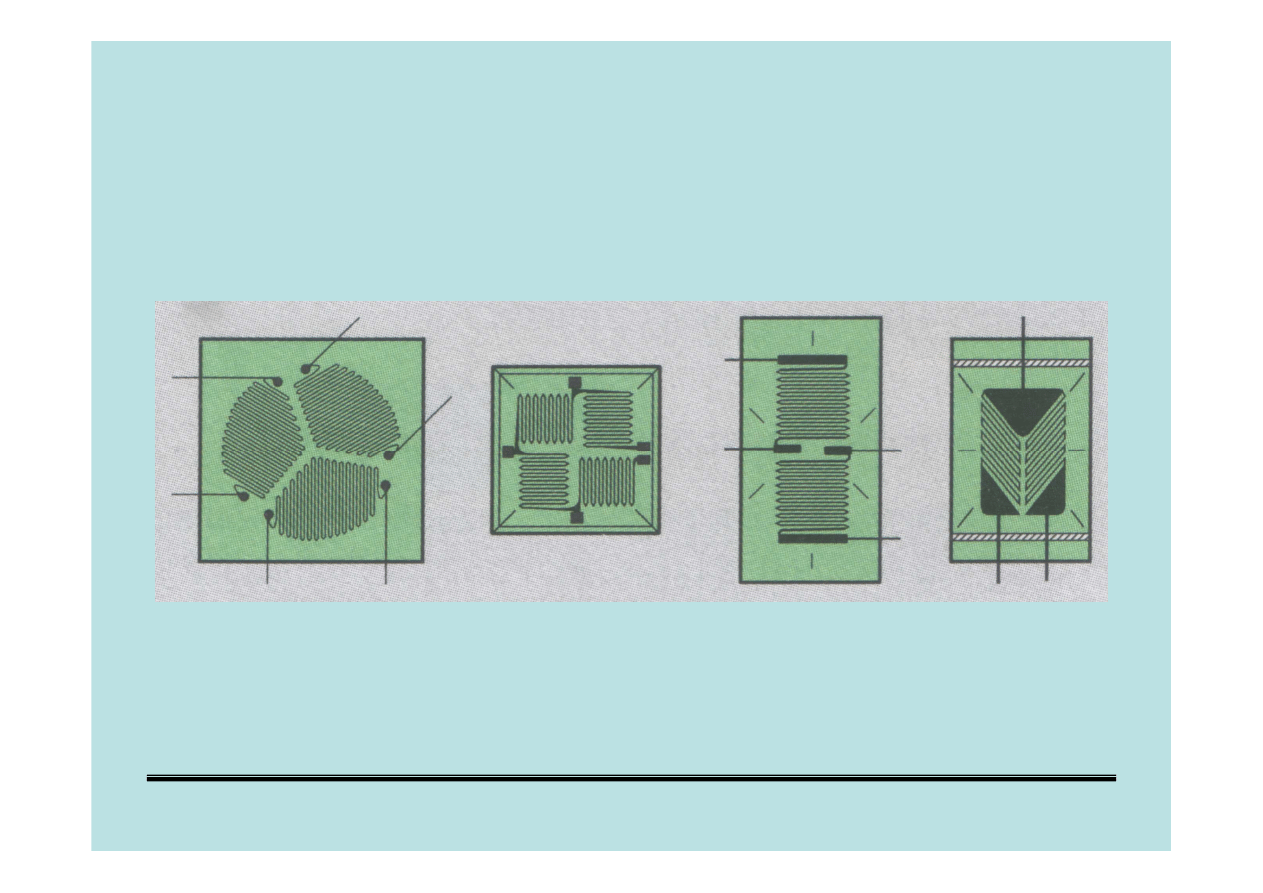
Rodzaje siatek tensometrów
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Rodzaje siatek tensometrów
Tensometry 1-osiowe
Tensometry 2-osiowe
Tensometry 3-osiowe
Tensometry 4-osiowe
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
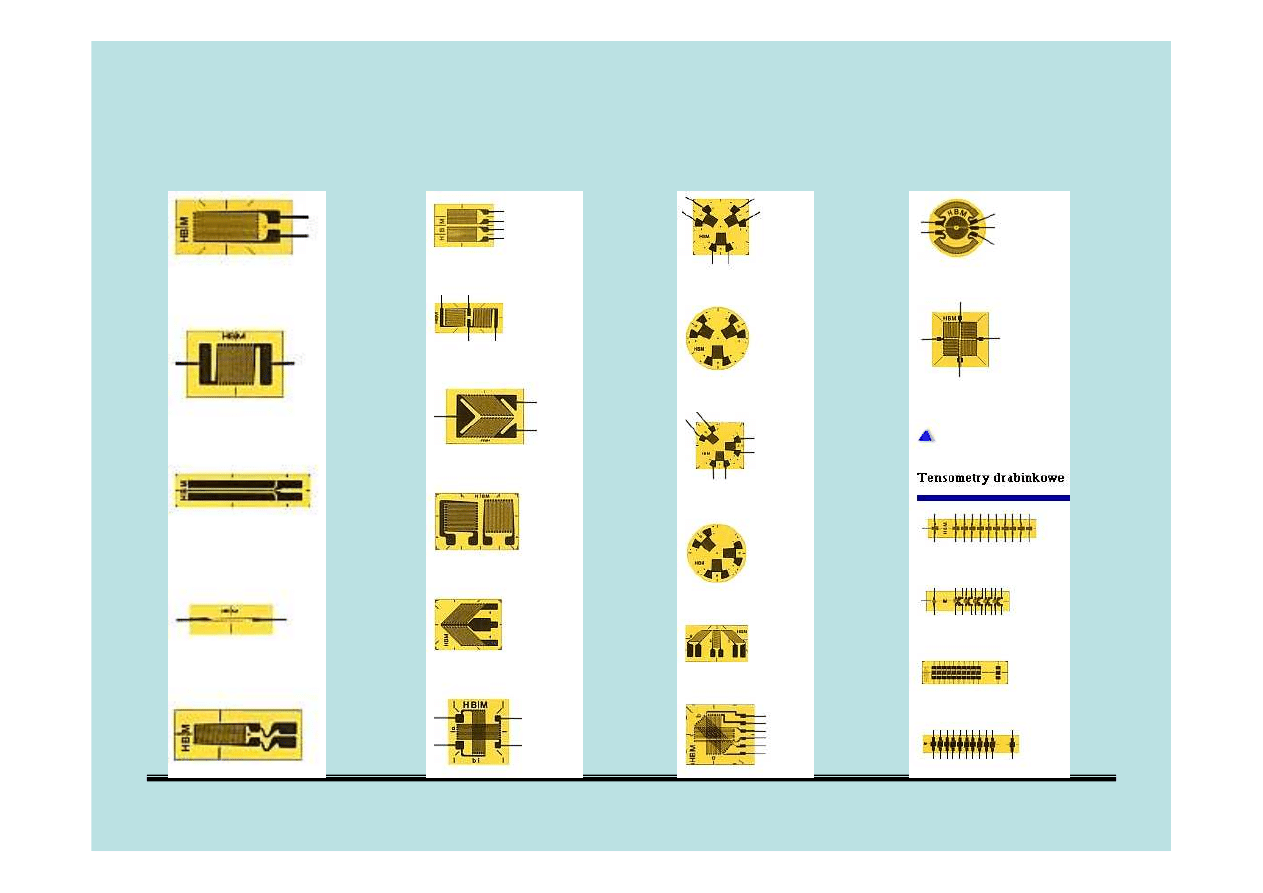
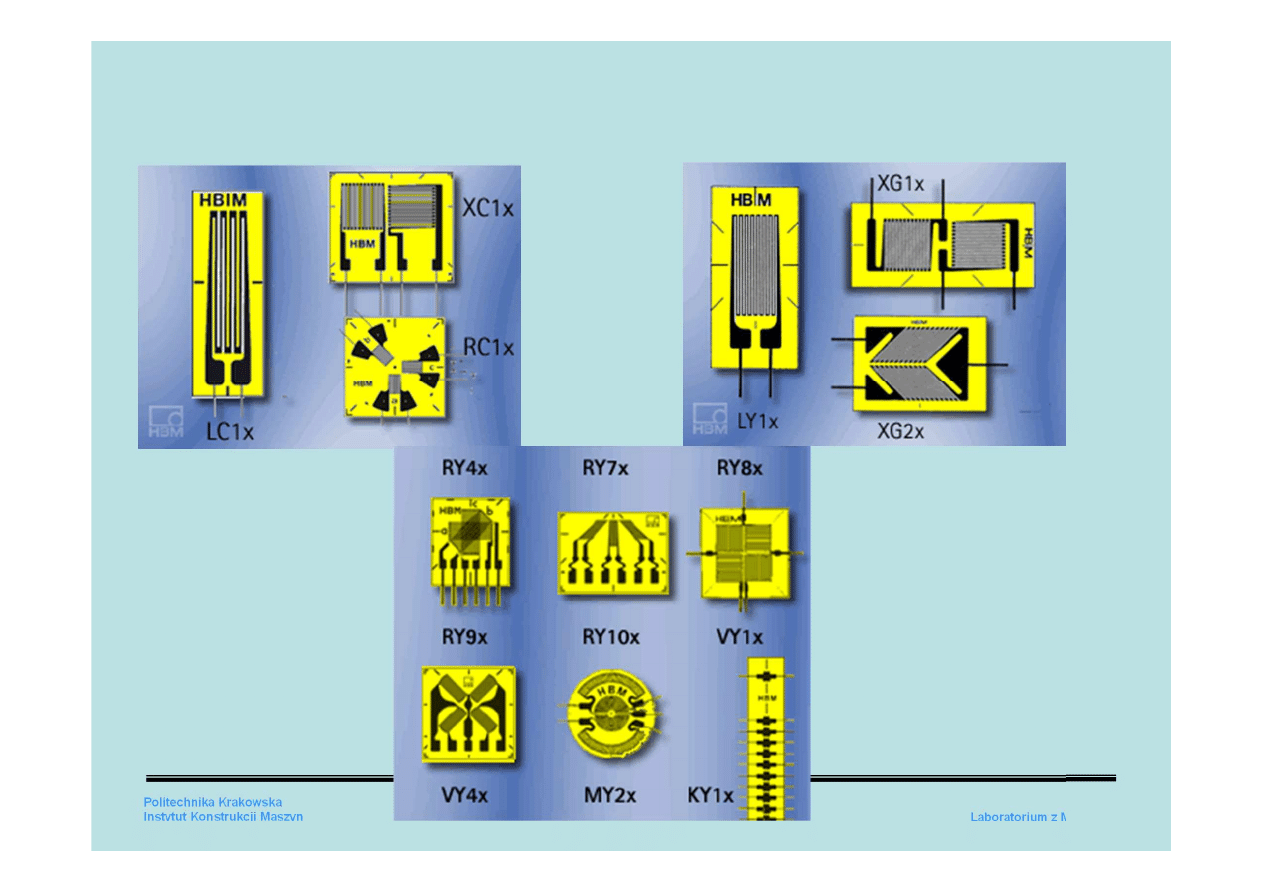
Przykłady tensometrów
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
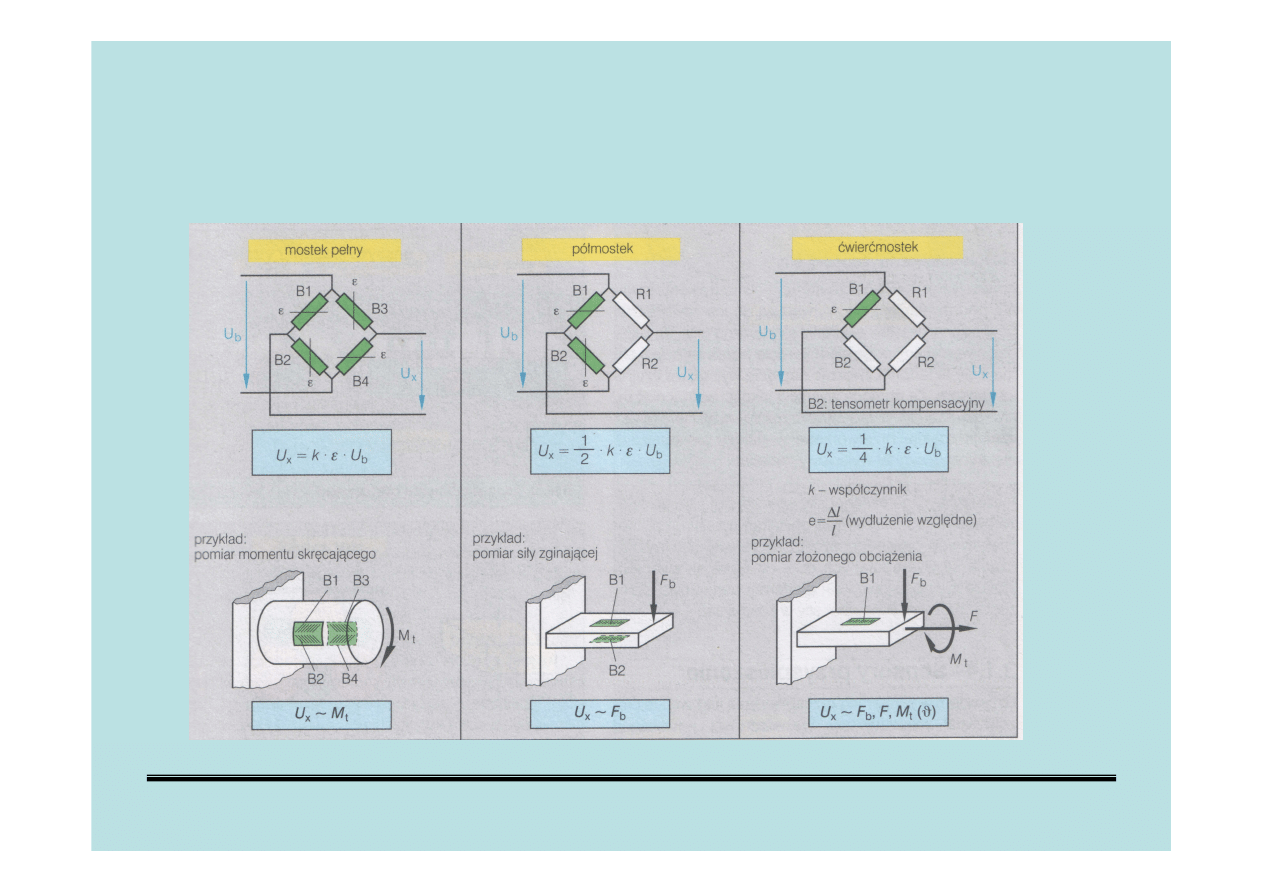
Mostek tensometryczny
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
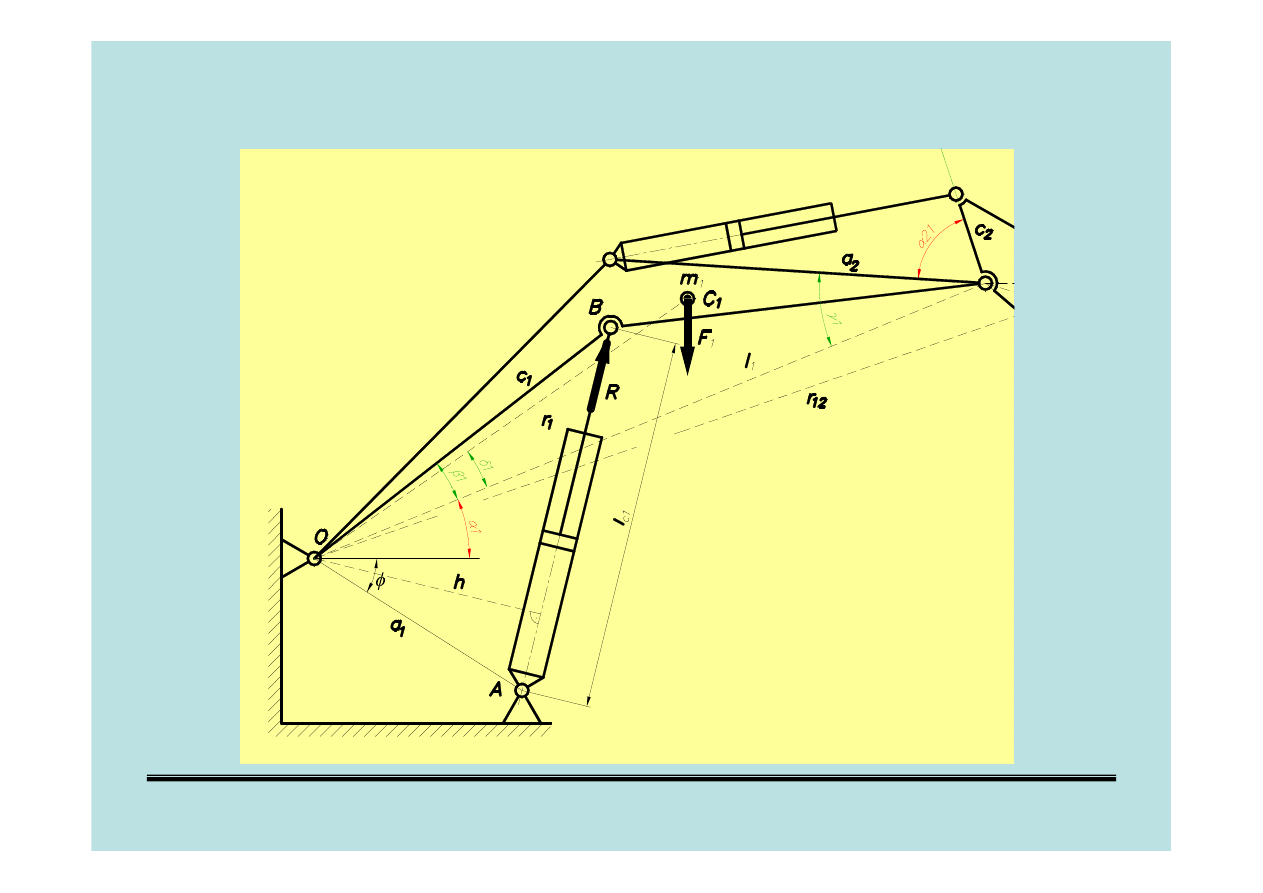
Układ o jednym stopniu swobody
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
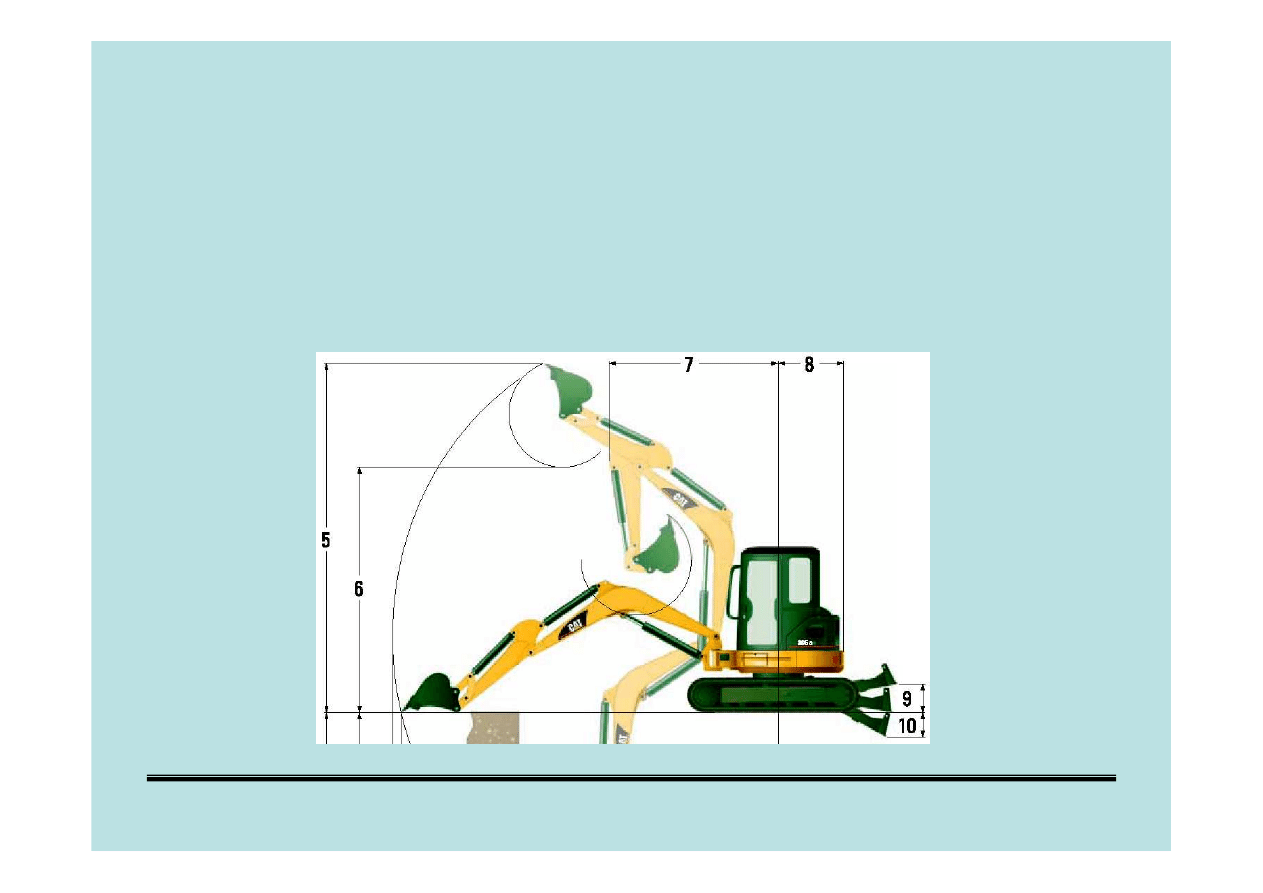
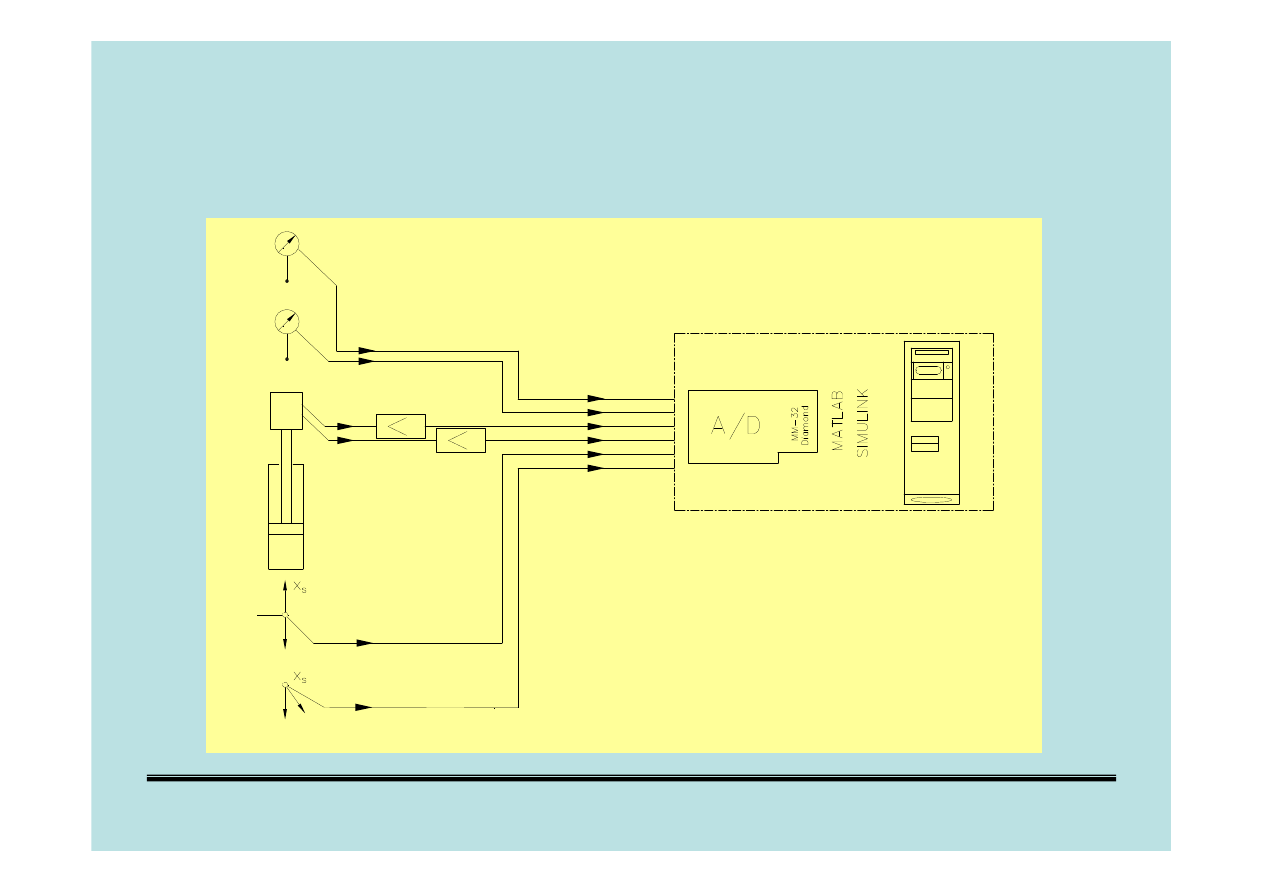
Schemat układu pomiarowego
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Obliczenia sił
1
1
2
2
T
R
p A
p A
F
=
−
−
2
2
x
y
R
R
R
=
+
p
1
, p
2
– ci
ś
nienia w siłowniku, odpowiednio po stronie tłokowej i tłoczyskowej,
A
1
, A
2
– odpowiednie pola powierzchni czynnej siłownika
R
x
, R
y
– składowe siły mierzonej przetwornikiem typu „load – pin”
(
)
2
2
2
1
2
D
d
D
A
;
A
4
4
π
π
−
=
=
Dane:
D=100 mm
-
ś
rednica tłoka,
d=60 mm
-
ś
rednica tłoczyska.

Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Zadania do wykonania
• opracowanie schematu układu:
– układ mechaniczno – nap
ę
dowy,
– układ elektryczno – pomiarowy,
– wykaz elementów,
• pomiar nast. wielko
ś
ci:
– przemieszczenie siłownika,
– napi
ę
cie wyj
ś
ciowe przetwornika k
ą
ta,
– ci
ś
nienia w siłowniku wysi
ę
gnika,
– napi
ę
cia wyj
ś
ciowe z przetwornika „load-pin”.

Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Zadania do wykonania
• obliczenie k
ą
ta pochylenia wysi
ę
gnika,
• obliczenie siły hydrostatycznej siłownika,
• obliczenie wypadkowej siły rejestrowanej
przetwornikiem „load-pin”,
• sporz
ą
dzenie wykresów mierzonych i
obliczonych parametrów,
• sporz
ą
dzenie charakterystyki siły w funkcji k
ą
ta
pochylenia wysi
ę
gnika przy podnoszeniu i
opuszczaniu (wykres z histerez
ą
)
• wnioski

Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Dodatki
Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Czujniki
Czujnik pomiarowy zwany tak
ż
e przetwornikiem wielko
ś
ci:
jest to element pomiarowy realizuj
ą
cy operacj
ę
odbioru informacji o stanie wielko
ś
ci lub
jej konkretnego parametru i przetworzenie odebranej informacji bez zmiany jej tre
ś
ci w
granicach bł
ę
du.
W zale
ż
no
ś
ci od rodzaju przetworzonych sygnałów wyj
ś
ciowych rozró
ż
nia si
ę
dwie
grupy rodzajów przetworników wielko
ś
ci:
• analogowe a/a dokonuj
ą
ce przetwarzania wielko
ś
ci mierzonej (fizycznej) na
inn
ą
wielko
ść
fizyczn
ą
dogodn
ą
do pomiaru lub dalszego przetwarzania,
• analogowo-dyskretne dokonuj
ą
ce przetwarzania wielko
ś
ci mierzonej
(fizycznej) na wielko
ść
fizyczn
ą
dyskretno-warto
ś
ciow
ą
np.: na proporcjonaln
ą
do warto
ś
ci mierzonej wielko
ś
ci liczb
ę
impulsów lub słowo binarne.

Laboratorium z Miernictwa
Politechnika Krakowska
Instytut Konstrukcji Maszyn
Katedra Maszyn Roboczych i Systemów Transportowych
Według natury sygnału wyj
ś
ciowego
przetworniki wielko
ś
ci mo
ż
na
podzieli
ć
na:
• mechaniczne,
• optyczne,
• elektryczne, itd.
W pomiarach wielko
ś
ci mechanicznych najszersze
zastosowanie zyskały przetworniki wielko
ś
ci, których sygnał
wyj
ś
ciowy ma charakter elektryczny, najcz
ęś
ciej napi
ę
cie.
Wyszukiwarka
Podobne podstrony:
biomechanika pomiary siły i osm11
Protokół z pomiaru siły dynamometrem, Fizjoterapia, Biofizyka, biofizyka
Pomiar siły elektromotorycznej i oporu wewnętrznego ogniwa metodą kompensacji, Politechnika Częstoch
Siłomierz pomiarowy PSK, Pomiary, Siły nastawcze
Pomiar siły elektromotorycznej ogniwa, Akademia Morska Szczecin, SEMESTR II, Fizyka, I semestr
15 Pomiar siły elektromotorycznej ogniwa i charakterystyka jego pracy
Elek- Pomiar siły elektromotor i oporu wewnętrznego ogniwa, Sprawozdania - Fizyka
Protokół z pomiaru siły dynamometrem, WSEiT, I rok, Biofizyka
ćw.1 pomiar siły hamowania, SiMR, Pojazdy, Laboratorium Pojazdów, ćw.1 hamulce, Sprawozdanie
Mikroprocesorowy miernik siły MMS, Pomiary, Siły nastawcze
Pomiar siły osiowej, Obróbka skrawaniem
07 pomiar sily
raporty, teoria1, Celem zadania jest pomiar siły elektromotorycznej SEM generowanej w ogniwie organi
7 pomiar siły hamowania
Pomiar siły skrawania
zastosowanie pomiaru siły elektromotorycznej ogniw galwanicznych 6VUXUCM3KCOLGMFGP3ULXZFJMGULSLOWTSQ
(1) Pomiar siły elektromotorycznej ogniwa
Pomiar siły elektromotorycznej doc
Pomiar siły skrawania
więcej podobnych podstron