
Stosuje się również inne rozwiązania przekształcające ciśnienie w cylindrze na ruch
obrotowy (śruby, krzywki) oraz siłowniki pneumatyczne membranowe, tj. sztuczne mięśnie
pneumatyczne.
4. Napędy elektryczne
W pierwszej fazie rozwoju robotów przemysłowych stosowano napędy pneumatyczne i
hydrauliczne. Wzrost wymagań w stosunku do robotów drugiej i wyższych generacji
spowodował rozwój napędów elektrycznych. Szacuje się obecnie, że 50% robotów ma napęd
elektryczny.
Napędy elektryczne mają następujące zalety:
niska cena napędu i układu sterowania w porównaniu z napędem hydraulicznym;
prostota układu zasilania;
duża niezawodność;
duża prostota czynności konserwacyjnych;
praca bez hałasu;
małe wymiary układu sterowania i zasilania.
Wadami napędu elektrycznego są:
niekorzystny, w porównaniu z napędem hydraulicznym, stosunek mocy
do masy urządzenia, szczególnie dla dużych mocy. Stąd też przy manipulatorach o bardzo
dużym udźwigu nie stosuje się napędu elektrycznego;
właściwości dynamiczne napędu elektrycznego pomimo dużego postępu
w tej dziedzinie, wciąż są gorsze od właściwości dynamicznych napędu
hydraulicznego;
wrażliwość na długotrwałe przeciążenia, mogące doprowadzić do spalenia silnika;
duże prędkości kątowe znamionowe wymagające stosowania przekładni
redukcyjnych.
Spośród różnych silników elektrycznych największe zastosowanie znalazły
komutatorowe silniki elektryczne prądu stałego i krokowe silniki elektryczne, zwłaszcza w
tzw. bezpośrednim napędzie elektrycznym. Te ostatnie dobrze nadają się dla celów
pozycjonowania. Bezkomutatorowe indukcyjne silniki elektryczne nie są korzystne przy
zmiennej prędkości obrotowej i przy zmianach kierunku wirowania, bezkomutatorowe
synchroniczne silniki elektryczne zaś nie są szeroko stosowane, chociaż mają szereg zalet. W
33

ich układzie sterowania wymagany jest magnetoindukcyjny bądź optoelektroniczny impulsa-
tor montowany na wale napędowym, który również jest niezbędny dla komutatorowych
silników elektrycznych prądu stałego. Krokowe silniki elektryczne wymagają dalszego
doskonalenia ich parametrów siłowych, geometrycznych i sterowania. Również liniowe
silniki elektryczne nie są często stosowane.
Postęp w budowie silników wykonawczych prądu stałego i silników skokowych
doprowadził do opracowania konstrukcji silników elektrycznych odpowiadających
warunkom stawianym przez napędy manipulatorów. Warunki te obejmują m.in.:
małe znamionowe prędkości kątowe (obrotowe);
odporność na krótkotrwałe znaczne przeciążenie, np. momenty rozruchowe ok. 10 razy
większe niż momenty znamionowe;
zapewnienie aperiodyczności procesów przejściowych w całym zakresie zmian
parametrów;
małe rozmiary;
mała bezwładność wirnika;
krótkie czasy rozruchu i hamowania, rzędu milisekund.
4.1. Napędy elektryczne prądu stałego
Najbardziej rozpowszechnionym napędem elektrycznym ramion manipulatorów
jest napęd z silnikami wykonawczymi obcowzbudnymi prądu stałego. Napęd taki
umożliwia zmiany prędkości kątowej w szerokim zakresie - aż do zatrzymania silnika
przez zmianę napięcia zasilania. Właściwość ta jest bardzo dogodna w układach
regulacji nadążnej położenia ramion manipulatora.
Niedogodnością tych napędów jest obecność komutatora i szczotek, gdyż:
wymagają one okresowego czyszczenia i wymiany szczotek, szczególnie
często w przypadku pracy silnika z małą prędkością i dużym prądem,
często spotykanej w napędach manipulatorów;
iskrzenie na komutatorze utrudnia zastosowanie takich robotów w
przypadku dużych wymagań ze względu na bezpieczeństwo i może być
źródłem zakłóceń dla elektronicznego układu sterowania robota;
34
tarcie szczotek o komutator powoduje powstanie strefy nieczułości, gdyż rozruch silnika
następuje dopiero po przekroczeniu przez napięciezasilania pewnej wartości progowej.
Wartość względna tej wartości progowej jest szczególnie duża dla silników małej mocy.
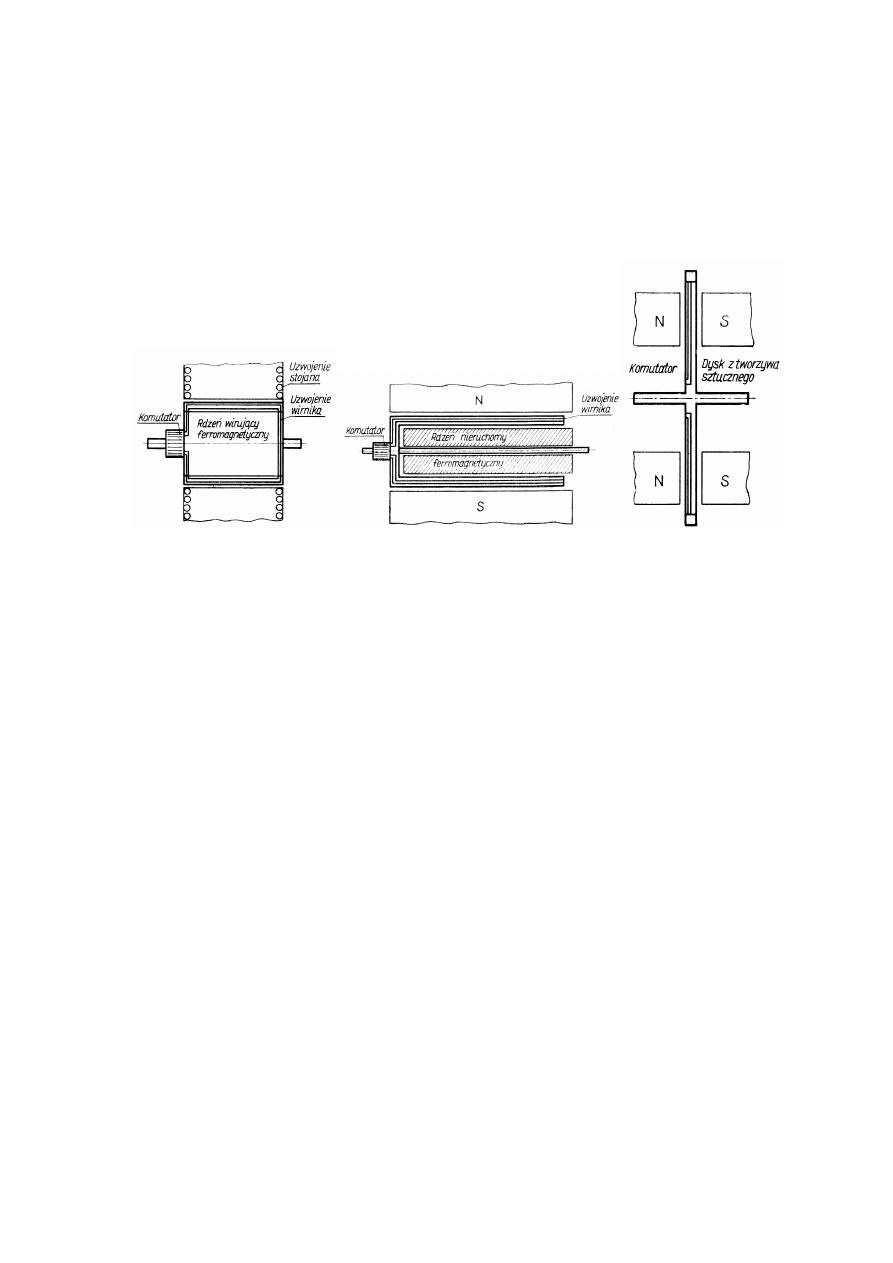
a) b) c)
Rys. 34. Różnice konstrukcyjne między silnikiem a) obcowzbudnym prądu stałego;
b) kubkowym; c) dyskowym (tarczowym)
Silniki obcowzbudne prądu stałego spotykane w manipulatorach mają:
stałe wzbudzenie, generowane przez małe, lecz silne magnesy trwałe ze
stopu alnico lub magnesy ceramiczne zawierające tlenki żelaza;
dużą liczbę par biegunów: 8...12 zapewniającą względnie małe prędkości
maksymalne, nie przekraczające ok. 200 rad/s (2000 obr/min);
małe momenty bezwładności wirnika, będącego najczęściej cienkim dyskiem z tworzywa
sztucznego z dużą liczbą uzwojeń nadrukowanych z oby
dwu stron i wałkiem z lekkiego i wytrzymałego tytanu.
Klasyczny silnik elektryczny może wytrzymać konkurencję z dyskowym pod względem
stosunku momentu obrotowego do masy. Z drugiej strony dyskowy silnik elektryczny jest
szybki w działaniu, ale ma mniejszy moment obrotowy rozruchowy. Jest on budowany dla
zmniejszenia stałej czasowej oraz bezwładności wirnika, co jest istotne przy projektowaniu
układów sterowania.
4.2. Silnik dyskowy (rys. 35)
35
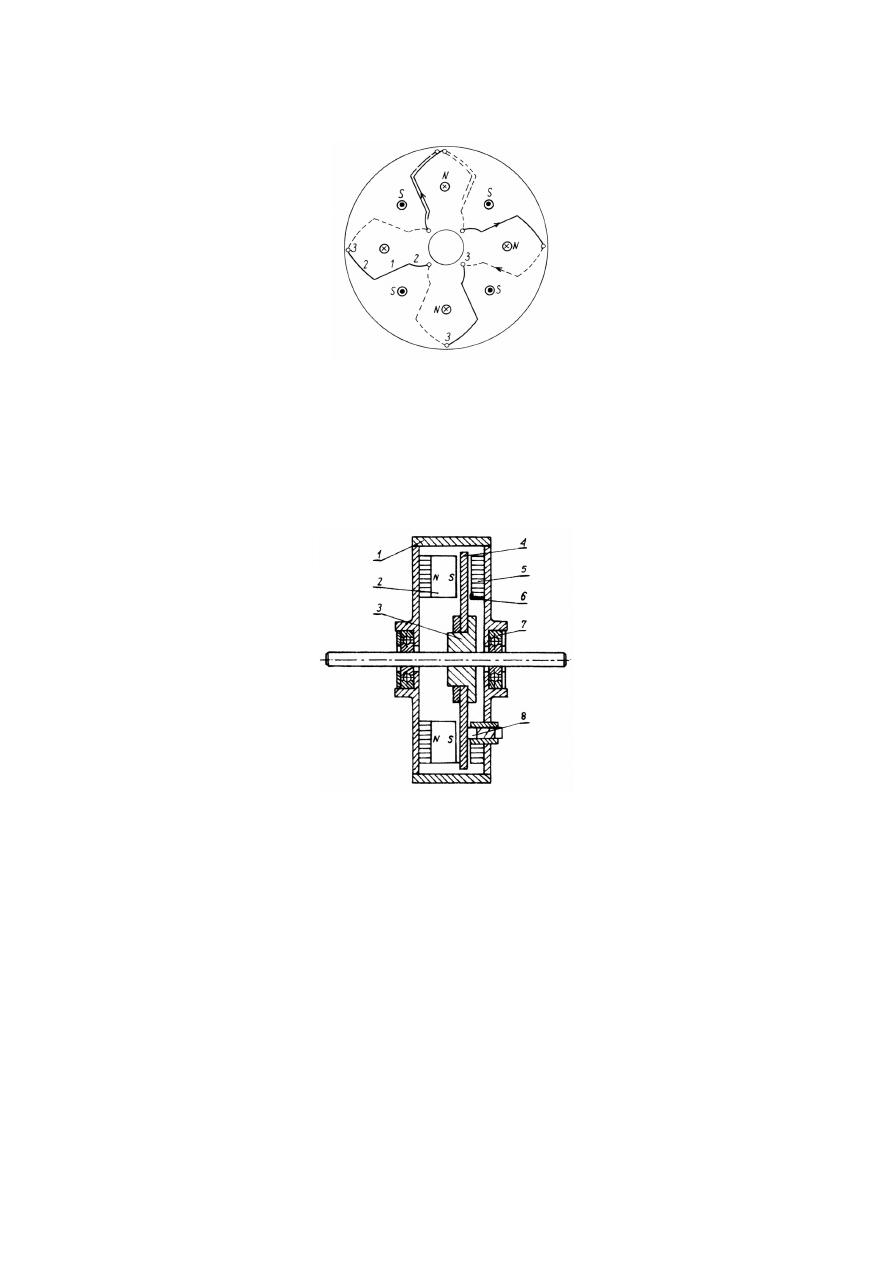
Rys. 35. Zasada druku wirnika dyskowego: linie ciągłe uzwojenie po jednej, przerywane – po
drugiej stronie tarczy izolacyjnej: 1 – część czynna pręta, 2 – połączenia czołowe, 3 – miejsca
połączeń elementów uzwojeń naniesionych po obydwu stronach tarczy, N,S – biegunowość
strumienia wzbudzenia
Rys. 36. Schemat silnika dyskowego: 1 – obudowa, 2 – biegun, 3 – piasta, 4 – tarcza,
5 – cewka, 6 – osłona, 7 – łożyska, 8 – tulejka, 9 - tarcza
Pozbawiony rdzenia ferrytowego wirnik silnika dyskowego charakteryzuje się
pomijalnie małą indukcyjnością, co znacznie zmniejsza kłopoty związane z iskrzeniem
komutatora. Z drugiej jednakże strony bezferrytowość wirnika sprawia, że silniki dyskowe są
bardzo wrażliwe na dłuższe przeciążenia. Wynika to stąd, że przy takim wirniku jedynym
elementem mogącym magazynować wydzieloną w nim energię cieplną jest uzwojenie
wirnika; doprowadza to do szybkiego wzrostu temperatury tych uzwojeń w warunkach
przedłużającego się przeciążenia. Stąd też silniki dyskowe są z reguły zaopatrywane w
zabezpieczenie „dynamiczne" przed przeciążeniami, zezwalające np. na 5...10-krotne
36
przeciążenia prądowe w okresie rozruchu lub hamowania, trwającym ok. 50 ms, lecz
ograniczające prąd przy dłuższych przeciążeniach.
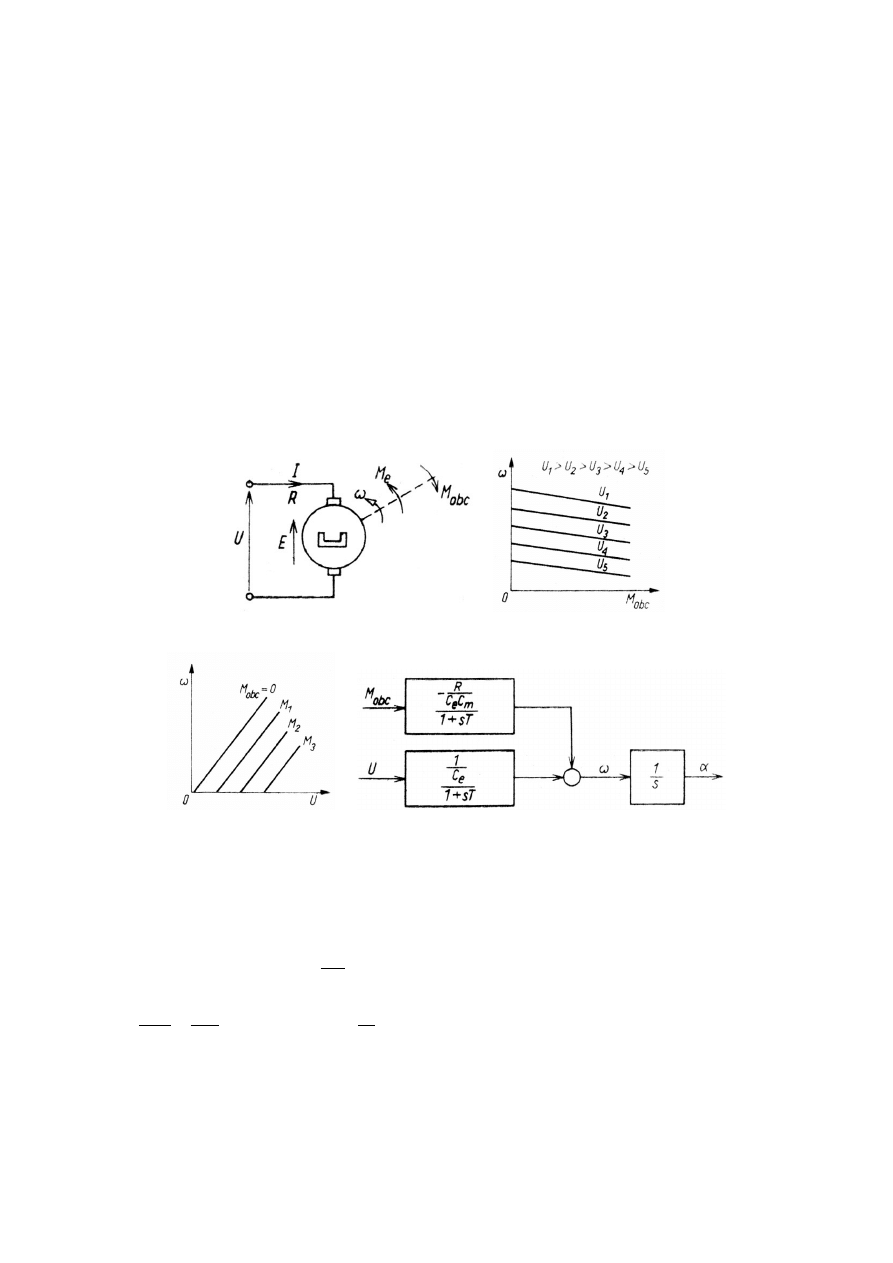
Na rys. 37 przedstawiono schemat układu zasilania silnika dyskowego, równania
opisujące silnik, jego charakterystyki statyczne i transmitancje operatorowe. Z wyrażenia na
stałą czasową elektromechaniczną T wynika, że maleje ona ze zwiększeniem momentu
rozruchowego MR i z maleniem prędkości znamionowej kątowej
ω
n
, a wzrasta ze
zwiększeniem momentu bezwładności J. Elektromechaniczna stała czasowa obecnie
produkowanych silników dyskowych, o mocach do 8 kW, jest rzędu 2...10 ms. W
manipulatorach stosuje się najczęściej silniki o mocach nie przekraczających 1 kW.
a) b)
c) d)
Rys. 37. Schemat układu i blokowy silnika dyskowego prądu stałego: a) schemat;
b)charakterystyki dla napięcia zasilania o stałej wartości; c) charakterystyki dla momentu
obciążającego o stałej wartości; d) schemat blokowy i transmitancja
;
E
RI
U
+
=
;
dt
d
J
M
M
obc
e
ω
=
−
;
ω
e
c
E
=
,
I
c
M
m
e
=
,
R
n
m
e
M
I
c
c
RI
T
ω
=
=
przy czym
;
e
n
c
U
=
ω
4.3. Sterowanie silników prądu stałego
37
Silniki prąciu stałego są sterowane sterownikami tyrystorowymi (w przypadku większych
mocy) lub tranzystorowymi (w przypadku mniejszych mocy). Ze względu na konieczność
zapewnienia sterownikom bardzo dobrych właściwości dynamicznych stosuje się powszechnie
sterowniki z impulsową modulacją napięcia stałego, umożliwiające dokonywanie przełączeń
napięcia na zaciskach twornika silnika z częstotliwościami dochodzącymi do 1 kHz; zapewnia
to sterownikom właściwości dynamiczne porównywalne z właściwościami dynamicznymi
silników wykonawczych.
4.3.1. Obwód wyjściowy sterownika
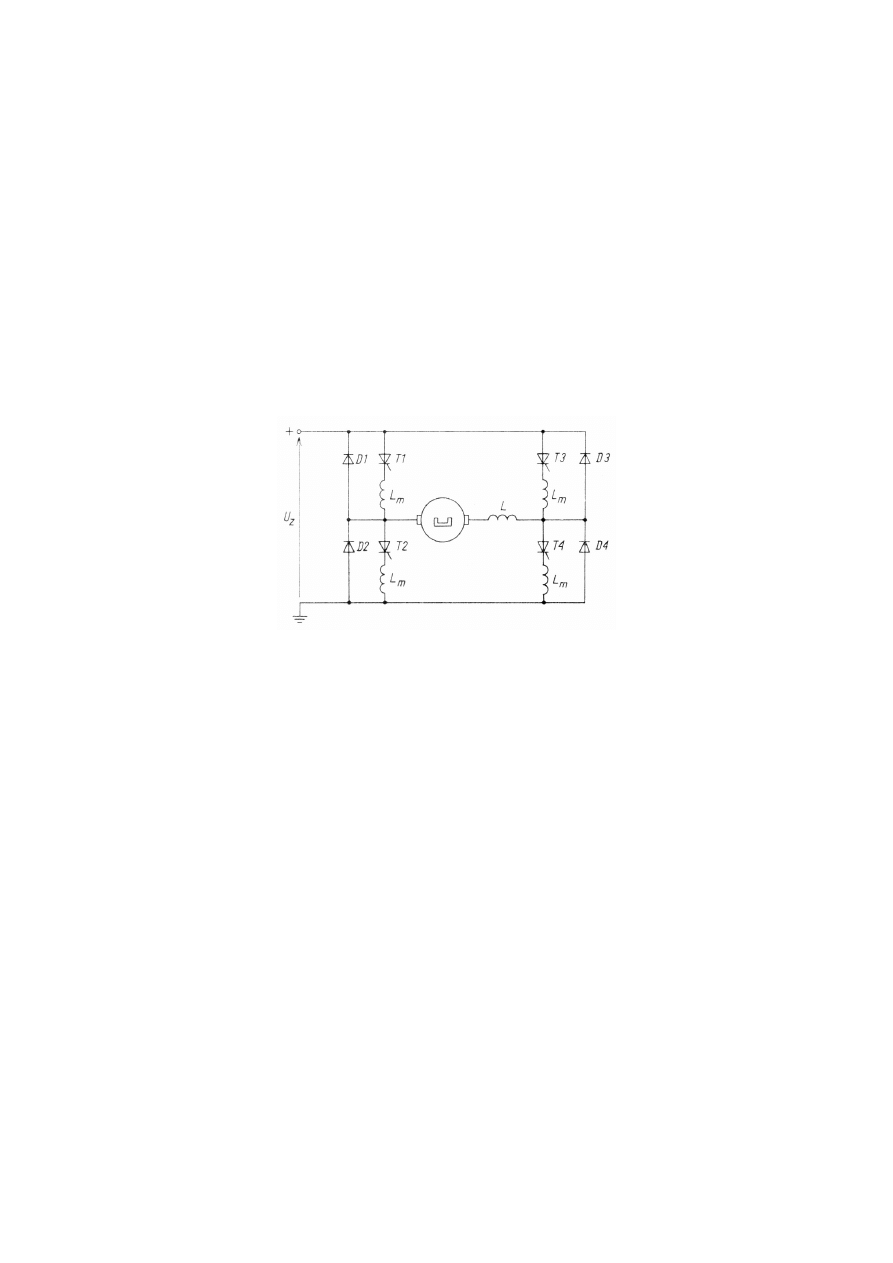
Rys. 38. Obwód wyjściowy sterownika z impulsową modulacją napięcia stałego:
U
z
– napięcie zasilania, L – indukcyjność wygładzająca prąd, T1...T4 – tyrystory;
D1...D4 – diody, L
m
– indukcyjności pomocnicze
U
z
pochodzi z zasilacza prądu stałego. W szeregu z twornikiem silnika wykonawczego
znajduje się indukcyjność L, zadaniem której jest wygładzanie impulsów prądu. Układ
mostkowy tyrystorów T1, ... , T4 umożliwia doprowadzenie napięcia zasilającego o zmie-
niającej się biegunowości do twornika silnika w czasie jego pracy silnikowej. Układ
mostkowy diod D1, ... , D4 umożliwia odzyskiwanie energii oddawanej do zasilacza przez
silnik podczas hamowania.
Na rys. 39 przedstawiono cztery rodzaje pracy sterownika. Na rysunku pozostawiono
tylko te tyrystory lub diody, które dla danego sposobu pracy przewodzą prąd. Podczas pracy
silnikowej prąd jest wymuszany przez wprowadzone na zaciski twornika silnika napięcie
zasilające skierowane przeciwnie aniżeli siła elektromotoryczna rotacji E twornika silnika.
Podczas hamowania prąd jest wymuszany przez siłę elektromotoryczną E skierowaną
przeciwnie do napięcia zasilającego.
38
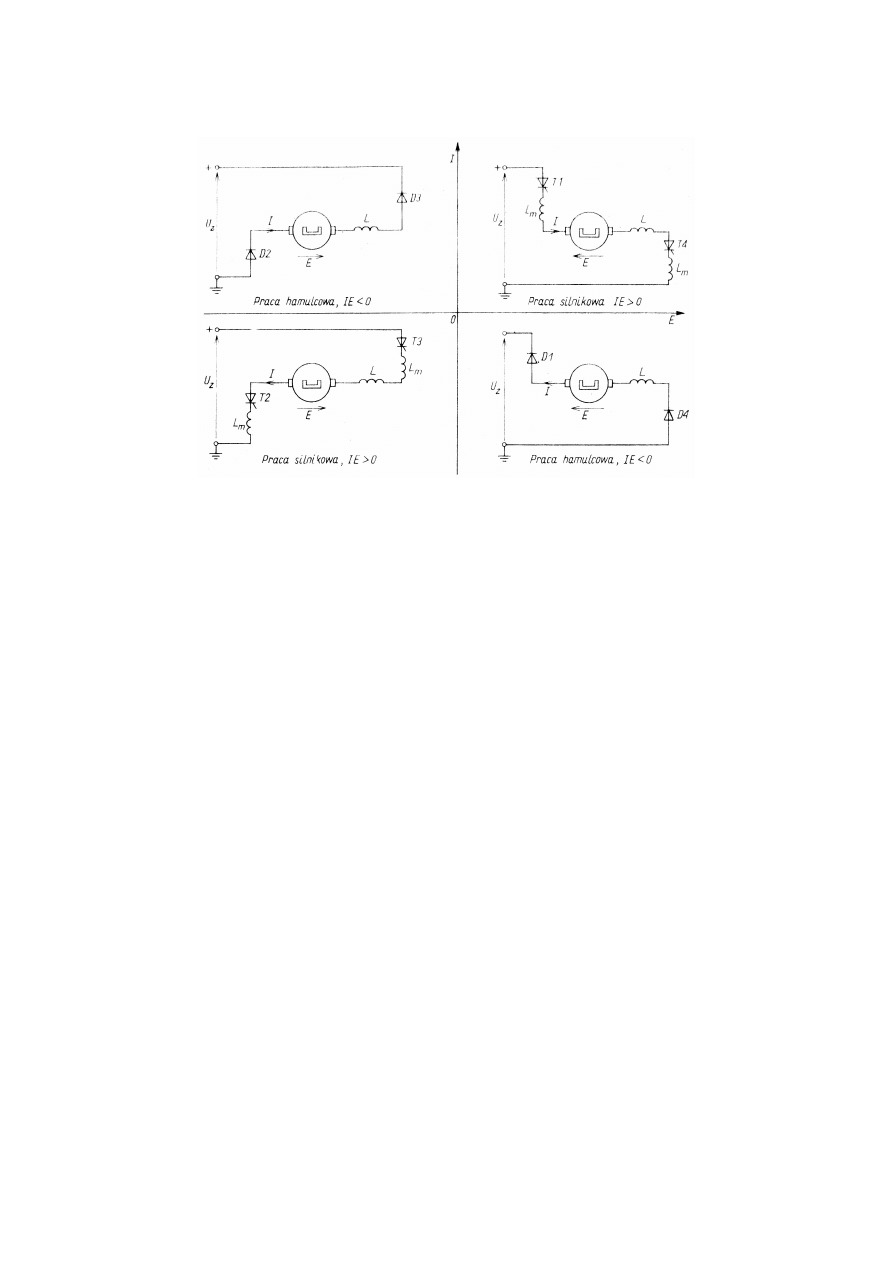
Rys. 39. Cztery rodzaje pracy sterownika
Tyrystory T1 i 74 oraz T2 i T3 sterownika są na przemian załączane (doprowadzane do
stanu przewodzenia) lub wyłączane (doprowadzane do stanu nieprzewodzenia), w wyniku
czego napięcie U twornika silnika ma przebieg prostokątny.
Na rys. 40 przedstawiono trzy różne przebiegi czasowe napięcia zasilania U i prądu I
silnika:
a) w przypadku jednakowej szerokości dodatnich i ujemnych impulsów napięcia U
z
; w
każdym okresie T zmian tego napięcia występują wszystkie cztery rodzaje pracy
sterownika. Właściwość ta leży u podstaw doskonałych właściwości dynamicznych
sterownika. Zmieniając bowiem stosunek szerokości dodatnich i ujemnych impulsów
napięcia można bardzo szybko wydłużyć czas trwania określonego rodzaju pracy i
skrócić czas trwania innego rodzaju pracy. Tym samym można bardzo szybko średnie
wartości napięcia, prądu i prędkości kątowej (równe 0 w przypadku t
a
= t
b
) uczynić
różnymi od zera i wysterować silnik;
b) w przypadku maksymalnej szerokości dodatnich impulsów napięcia prąd nie zmienia
kierunku pozostając dodatnim dla całego okresu T, przy czym w każdym okresie 7
występują kolejno tylko I i II rodzaj pracy. Wartości średnie napięcia i prędkości
kątowej są dodatnie, a ich wartości bez względne są największe;
c) w przypadku maksymalnej szerokości ujemnych impulsów napięcia prąd
również nie zmienia kierunku pozostając ujemnym dla całego okresu T,
39
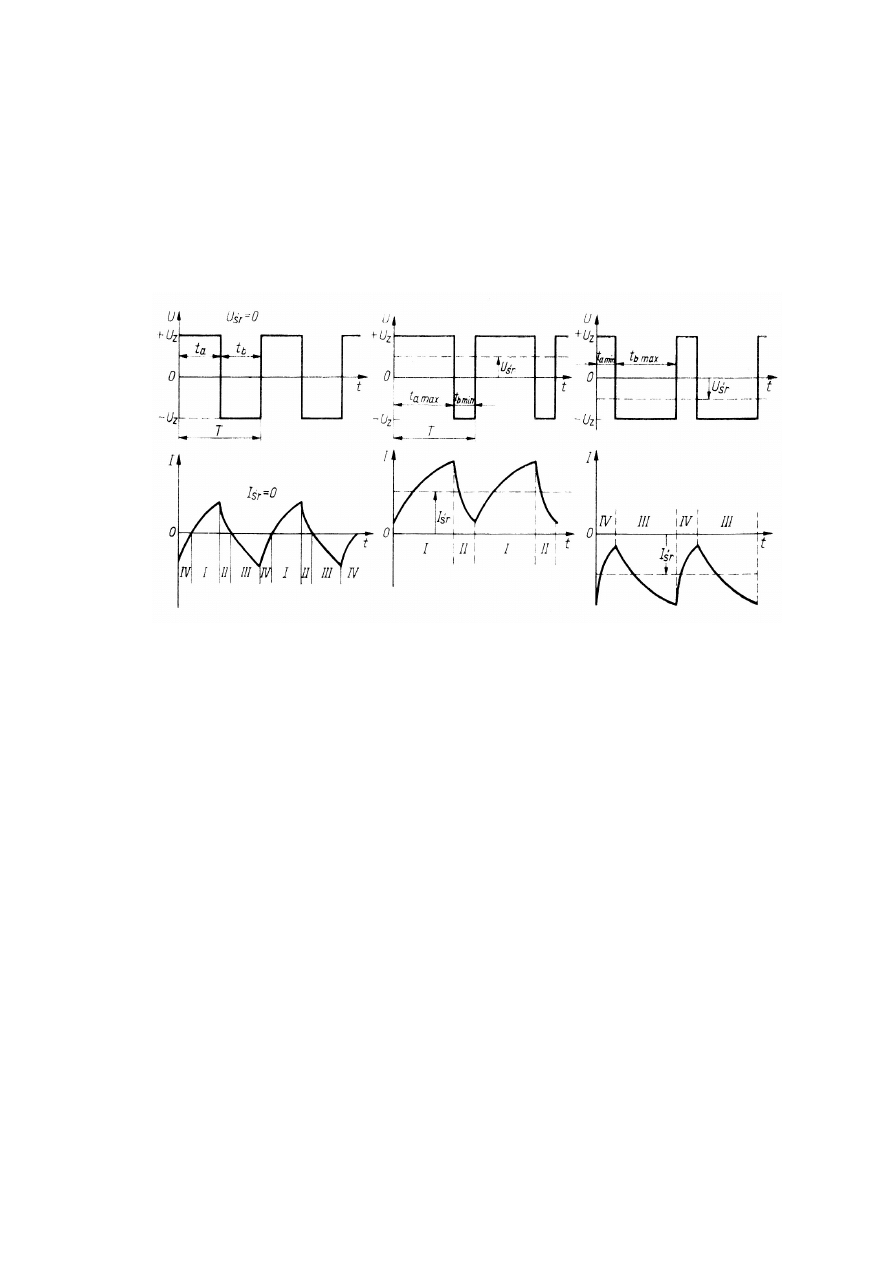
przy czym w każdym okresie T występują kolejno tylko IV i III rodzaj pracy.
Wartości średnie napięcia i prędkości Kątowej są ujemne, a ich wartości
bezwzględne są również największe.
a) b) c)
Rys. 40. Przebiegi napięcia zasilania U i prądu I silnika dla:
a) t
a
=t
b
; b) t
amax
>t
bmin
; c) t
amin
<t
bmax
4.3.2. Układ komutacji sterownika
Komutacją nazywa się wyłączenie załączonego tyrystora. Komutacja wymaga
przekazania tyrystorowi stosunkowo dużej energii magazynowanej zwykle w specjalnym
kondensatorze komutacyjnym. Ponowne naładowanie tego kondensatora wymaga czasu; im
dłuższy ten czas, tym gorsze właściwości dynamiczne ma sterownik. Stąd rozpowszechnienie
specjalnych układów komutacji zawierających obwody szybkiej regeneracji kondensatora
komutacyjnego (rys. 41).
40
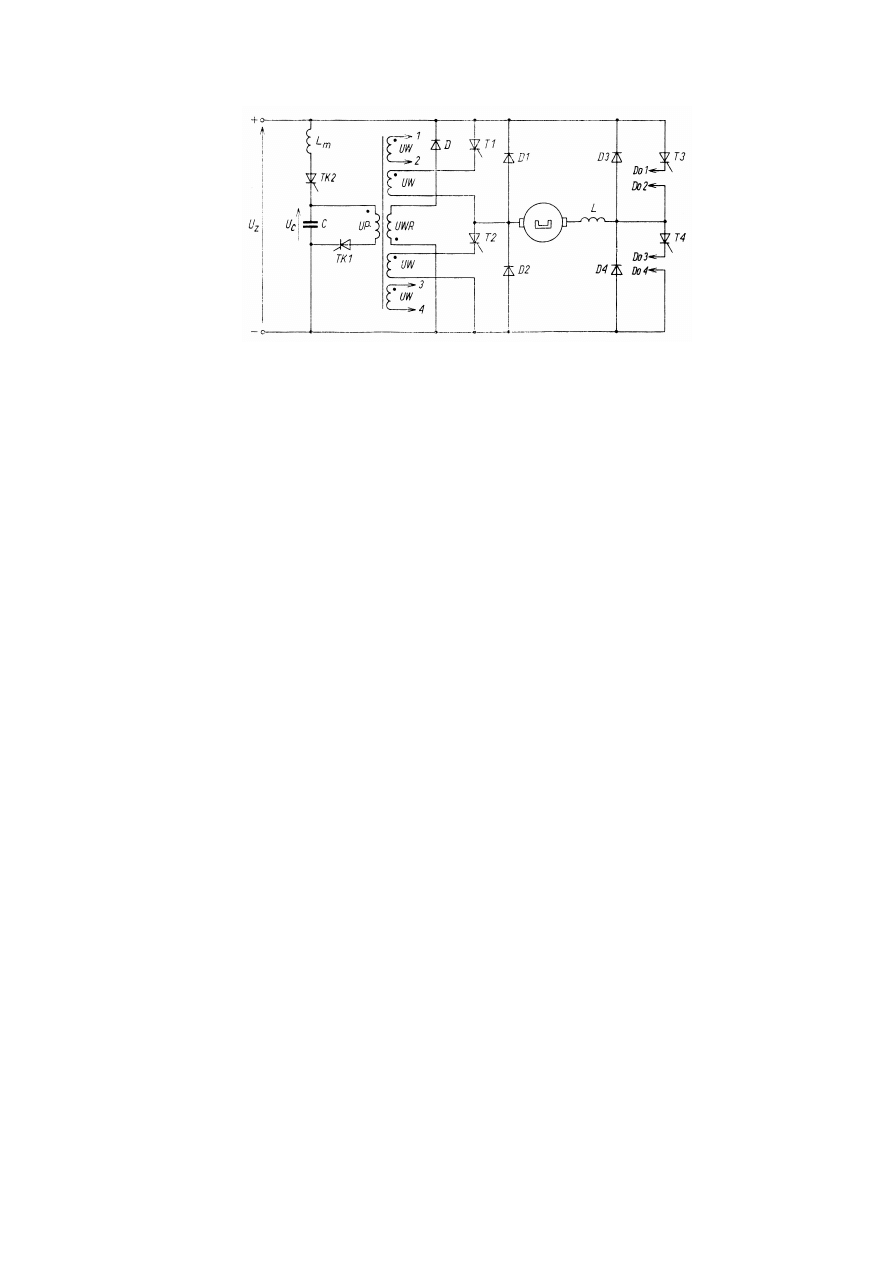
Rys. 41. Schemat układu komutacji sterownika: U
z
– napięcie zasilania; C – kondensator
komutacyjny, TK1, TK2 – tyrystory komutacyjne, UP – uzwojenie pierwszego transformatora,
UW – uzwojenie wtórne transformatora, UWR – uzwojenie wtórne regeneracyjne,
D, D1...D4 – diody, T1...T4 - tyrystory
W układzie tym kondensator komutacyjny C naładowany do napięcia U
c
zostaje przez
tyrystor komutacyjny TK1 załączony w momencie komutacji do uzwojenia pierwotnego UP
transformatora. Uzwojenia wtórne UW tego transformatora generują w tym momencie
napięcia wsteczne, wskutek czego załączone tyrystory zostają wyłączone. Równocześnie
napięcie indukowane w uzwojeniu wtórnym regenerującym UWR wzrastając przekracza
wartość napięcia zasilania U
z
, wskutek czego przez uzwojenie UWR i diodę D popłynie prąd.
Prąd ten indukuje w uzwojeniu pierwotnym UP siłę elektromotoryczną zapobiegającą
całkowitemu rozładowaniu kondensatora C, wskutek czego skraca się czas potrzebny do
późniejszego naładowania tego kondensatora do pierwotnego napięcia U
c
przez włączenie
drugiego tyrystora komutacyjnego TK2. Obydwa tyrystory komutacyjne TK1 i TK2 komutują
samoczynnie:
tyrystor TK1 pod wpływem napięcia indukowanego w uzwojeniu UP
przez prąd uzwojenia wtórnego regenerującego UWR;
tyrystor TK2 pod wpływem napięcia U
c
, do którego zostaje naładowany
kondensator C.
4.3.3. Zasilacz regenerujący
Zasilaczem regenerującym nazywa się zasilacz prądu stałego mogący również pracować
jako inwertor, tzn. oddawać energię do sieci prądu przemiennego w przypadku, gdy napięcie
zasilania odbiornika stanie się wyższe niż napięcie wyjściowe zasilacza.
41
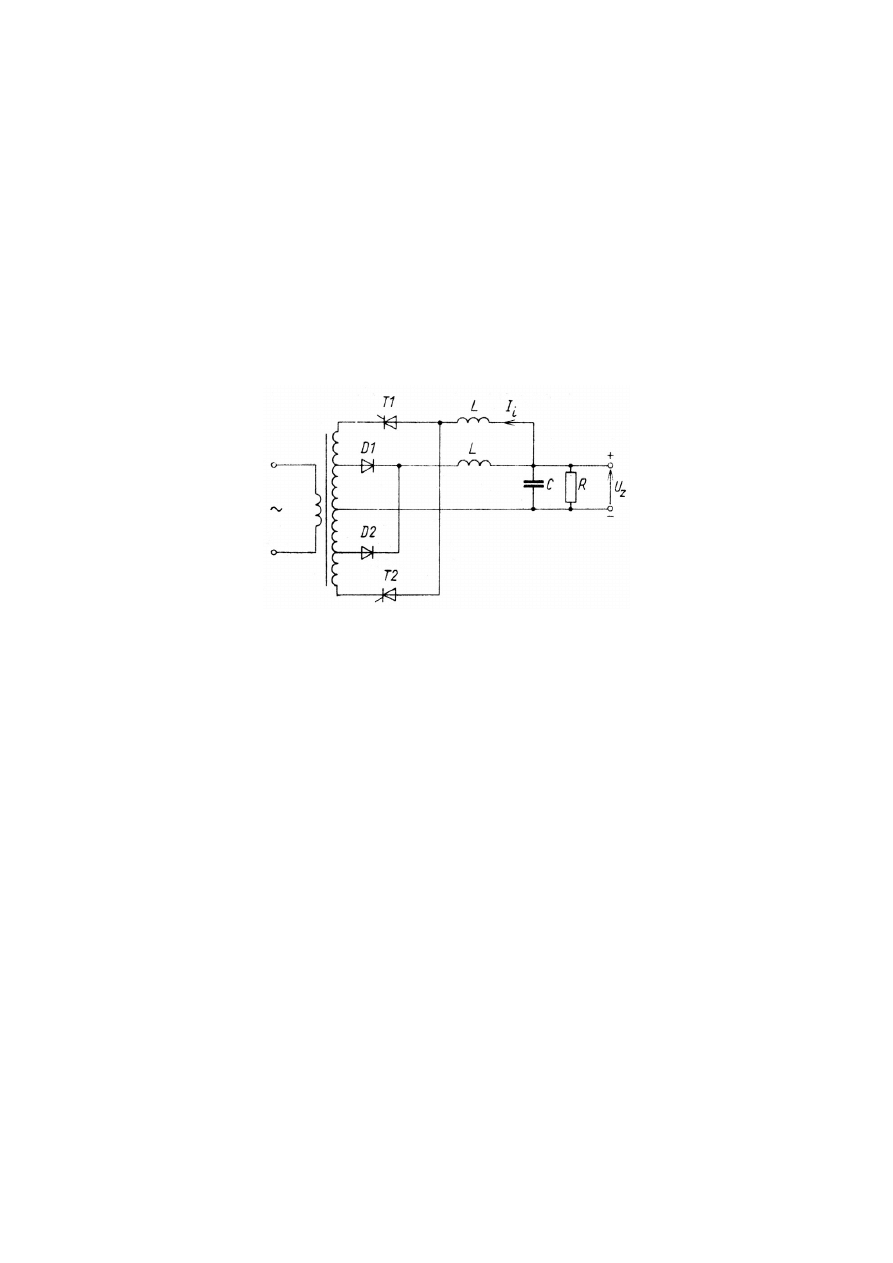
Na rys. 42 przedstawiono schemat zasilacza regenerującego przeznaczonego do zasilania
obwodu wyjściowego sterownika. W zasilaczu tym diody D1 i D2 tworzą prostownik dwu
połówkowy zasilający poprzez dławik L filtr RC, którego napięcie wyjściowe jest napięciem
zasilania U
z
obwodu wyjściowego sterownika. Tyrystory T1 i T2 pracują jako inwertory z
odpowiednio przesuniętymi stałymi momentami załączania dobranymi tak, że przy
znamionowym napięciu wyjściowym U
z
prąd inwertora I, jest równy 0. Jeżeli natomiast
napięcie U
z
stanie się wyższe niż znamionowe (co nastąpi przy pracy hamulcowej silnika), to
prąd I, stanie się różny od zera i wskutek przełączania tyrystorów T1 i T2 zostaje oddany do
sieci prądu przemiennego.
Rys. 42. Schemat zasilacza regeneracyjnego: D1 i D2 – diody, T1 i T2 – tyrystory,
L – indukcyjność, R i C – rezystancja i pojemność filtru
4.4. Silniki krokowe (skokowe) elektryczne
Zasada pracy wszystkich silników krokowych opiera się na dyskretnych zmianach
pola elektromagnetycznego w szczelinie silnika. Za zmianami położenia osi pola
wzbudzającego podąża wirnik, który cyklicznie zajmuje określone położenia w przestrzeni.
Liczba tych położeń jest zawsze większa niż dwa na jeden obrót.
Krokowe silniki elektryczne umożliwiają więc zamianę dyskretnego sygnału
elektrycznego na przyrostowy moment położenia kątowego. Są one typu synchronicznego,
co umożliwia korelację pomiędzy położeniami wejściowym i końcowym.
Wyróżnia się trzy rodzaje krokowych silników elektrycznych:
magnetoelektryczne (ze stałymi magnesami),
reluktancyjne (ze zmienną reluktancją),
hybrydowe (łączą własności pozostałych odmian).
42
Z punktu widzenia zastosowań w robotach silniki skokowe mają następujące zalety:
łatwość ich sterowania za pomocą sygnałów cyfrowych generowanych
przez komputer;
możliwość uzyskania bardzo dużych dokładności pozycjonowania napędzanego ramienia
lub palców przy sterowaniu w torze otwartym, tj. bez konieczności pomiaru położenia.
Silniki skokowe stanowią więcalternatywę dla serwomechanizmów położenia.
Ich wadami są nieciągłe wartości przyśpieszeń, ograniczone osiągi, zmienne momenty
zależne od położenia oraz zbyt małe wartości momentów (wady tej nie mają silniki skokowe
elektryczno-hydrauliczne).
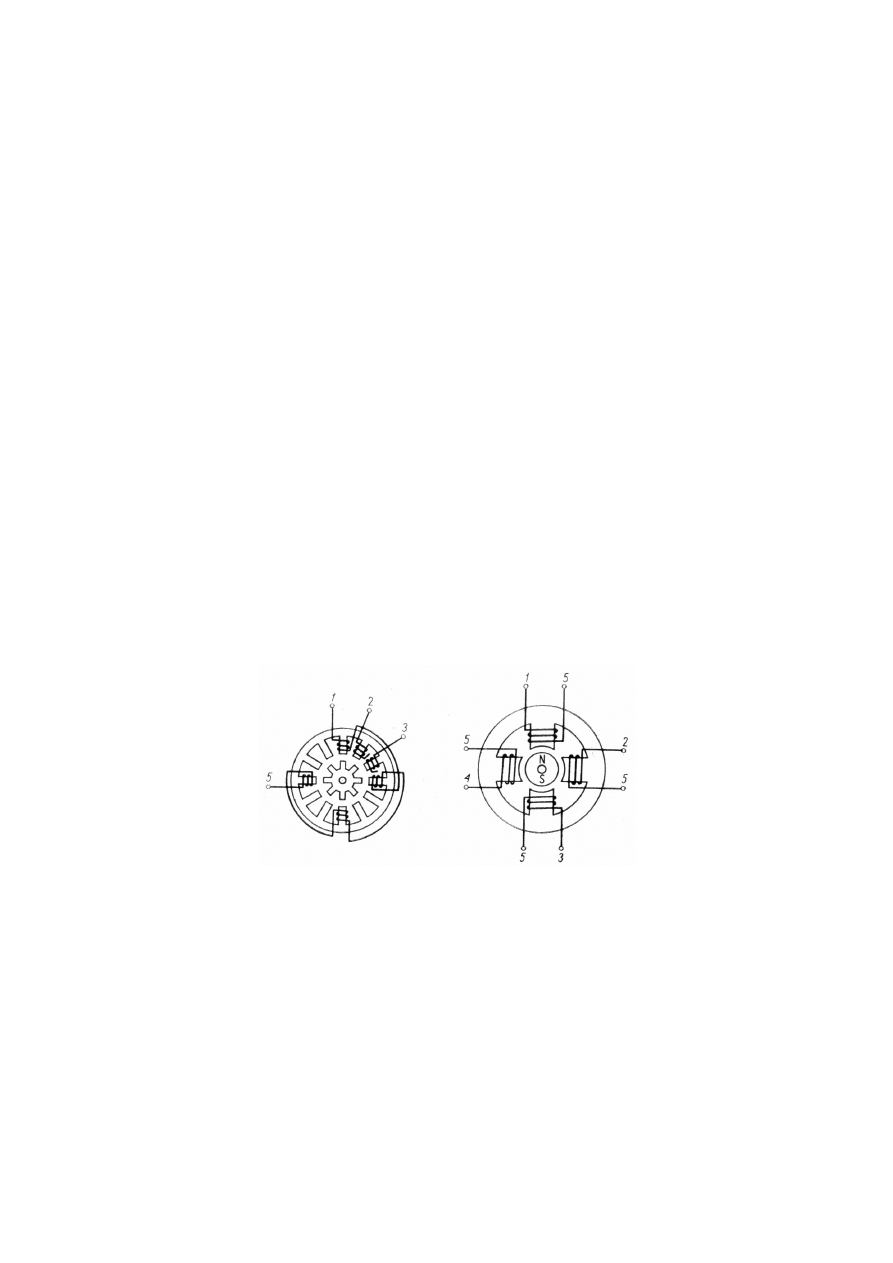
Silnik reluktancyjny przedstawiony na rys. 43 ma stojan o 12 biegunach
przesuniętych względem siebie o 30° oraz wirnik o 8 biegunach przesuniętych względem
siebie o 45°. Uzwojenia stojana są połączone szeregowo w trzy grupy, z których
każda zawiera 4 uzwojenia. Grupy te są kolejno wzbudzane prądem stałym, w wyniku
czego wirnik ustawia się w sposób minimalizujący reluktancję obwodu magnetycznego
zamykającego strumień magnetyczny wytworzony przez daną grupę uzwojeń. I tak np.
przy przepływie prądu przez uzwojenie grupy 1 bieguny wirnika najbliższe biegunom
uzwojeń tej grupy ustawią się jak na rysunku. Wzbudzenie samego uzwojenia 2 sprawi, że
wirnik obróci się o kąt krokowy równy 45°-30° = 15° w lewo.
Rys. 43. Silnik elektryczny krokowy: a) reluktancyjny; b) o magnesie trwałym
1, ..., 4 – zaciski uzwojeń, 5 (c – common) – zacisk wspólny
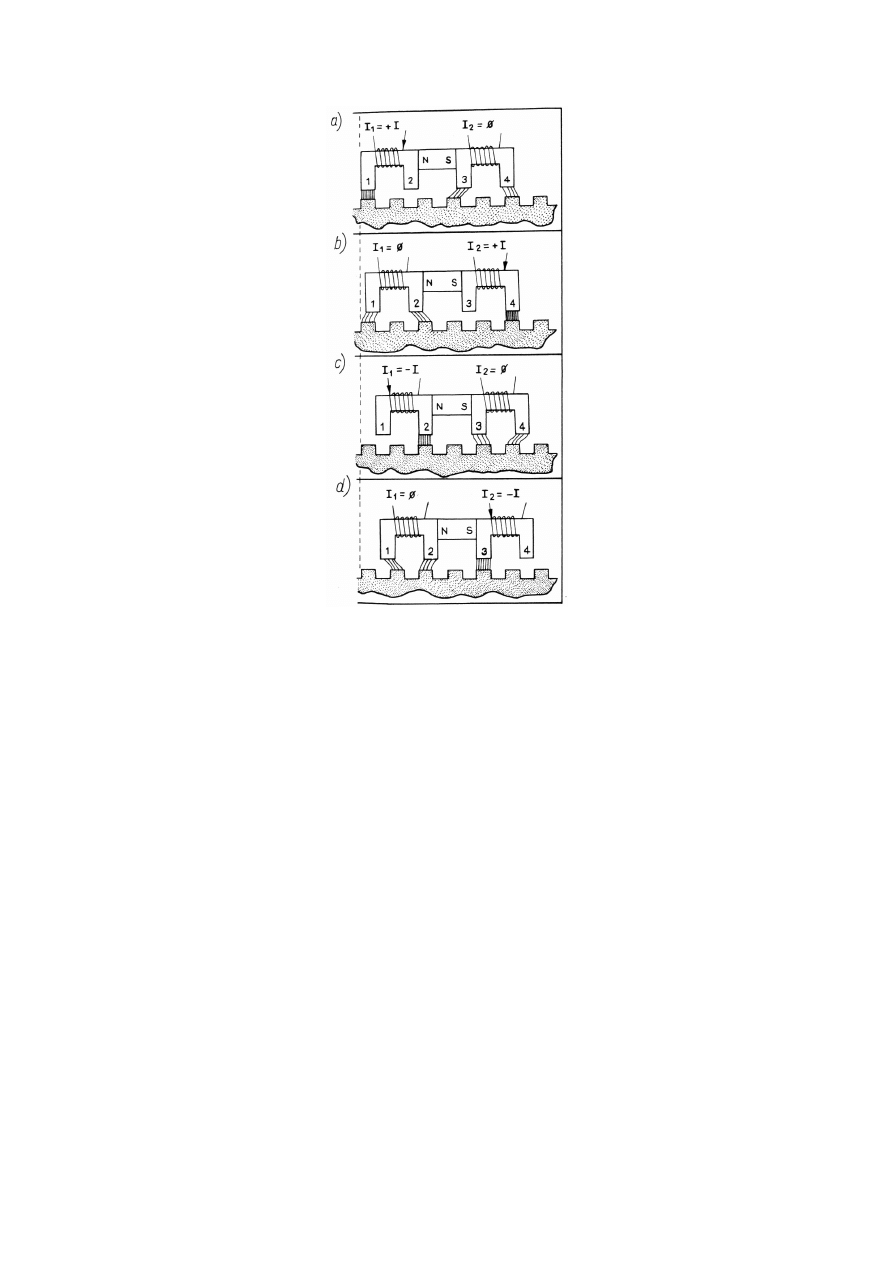
Na rys. 44 przedstawiono zasadę działania krokowego silnika elektrycznego o wirniku
czynnym z dwubiegunowym magnesem trwałym. Na rysunku pokazano sytuacje
odpowiadające czterem kolejnym taktom komutacji uzwojenia. Po zasileniu cewki bieguna 1
napięciem (takt 1) wytworzy ona strumień magnetyczny
Φ
1
=
Φ
s
skierowany jak na rysunku.
Spolaryzowany dwubiegunowo wirnik zajmie takie położenie, aby zwrot kierunku strumienia
magnetycznego wirnika był zgodny ze zwrotem kierunku strumienia magnetycznego stojana.
43

Jeżeli teraz dodatkowo zostanie zasilona cewka bieguna 2 (takt 2), to strumień stojana
Φ
s
będący wypadkowym strumieniem
Φ
1
i
Φ
2
zmieni położenie przestrzenne i na wirnik zacznie
działać moment obrotowy (od współdziałania strumienia stojana i wirnika) powodujący obrót
wirnika do pokrycia się zwrotu jego osi magnetycznej ze zwrotem kierunku strumienia
magnetycznego stojana. Kolejny skok wirnika nastąpi po odłączeniu od źródła zasilania
cewki bieguna 1 (takt 3), a czwarty po dodatkowym zasileniu cewki bieguna 3. Po ośmiu ta-
kich taktach komutacji wektor strumienia stojana i wirnik wykonują pełny obrót. Wadą tego
sposobu sterowania jest konieczność stosowania impulsów o różnej polaryzacji.
Rys. 44. Zasada działania krokowego silnika elektrycznego o wirniku czynnym
4.5. Silniki skokowe elektryczno-hydrauliczne
Silniki skokowe elektryczno-hydrauliczne są elektryczno-mechaniczno-
hydraulicznymi dyskretnymi przetwornikami binarnych sygnałów elektrycznych na kąt
obrotu lub przesunięcie wału siłownika hydraulicznego.
Podobnie jak dla silników skokowych elektrycznych kąt obrotu lub przesunięcie
wału mogą przyjmować jedynie wartości dyskretne będące całkowitymi wielokrotnościami
kąta krokowego lub przesunięcia krokowego. Idea elektryczno-hydraulicznego silnika
skokowego polega na sprzęgnięciu elektrycznego silnika skokowego z hydraulicznym
wzmacniaczem suwakowym ruchu obrotowego lub posuwistego, który z kolei steruje
siłownikiem hydraulicznym.
44
Silniki skokowe elektryczno-hydrauliczne można podzielić na silniki ruchu
obrotowego i silniki ruchu posuwistego.
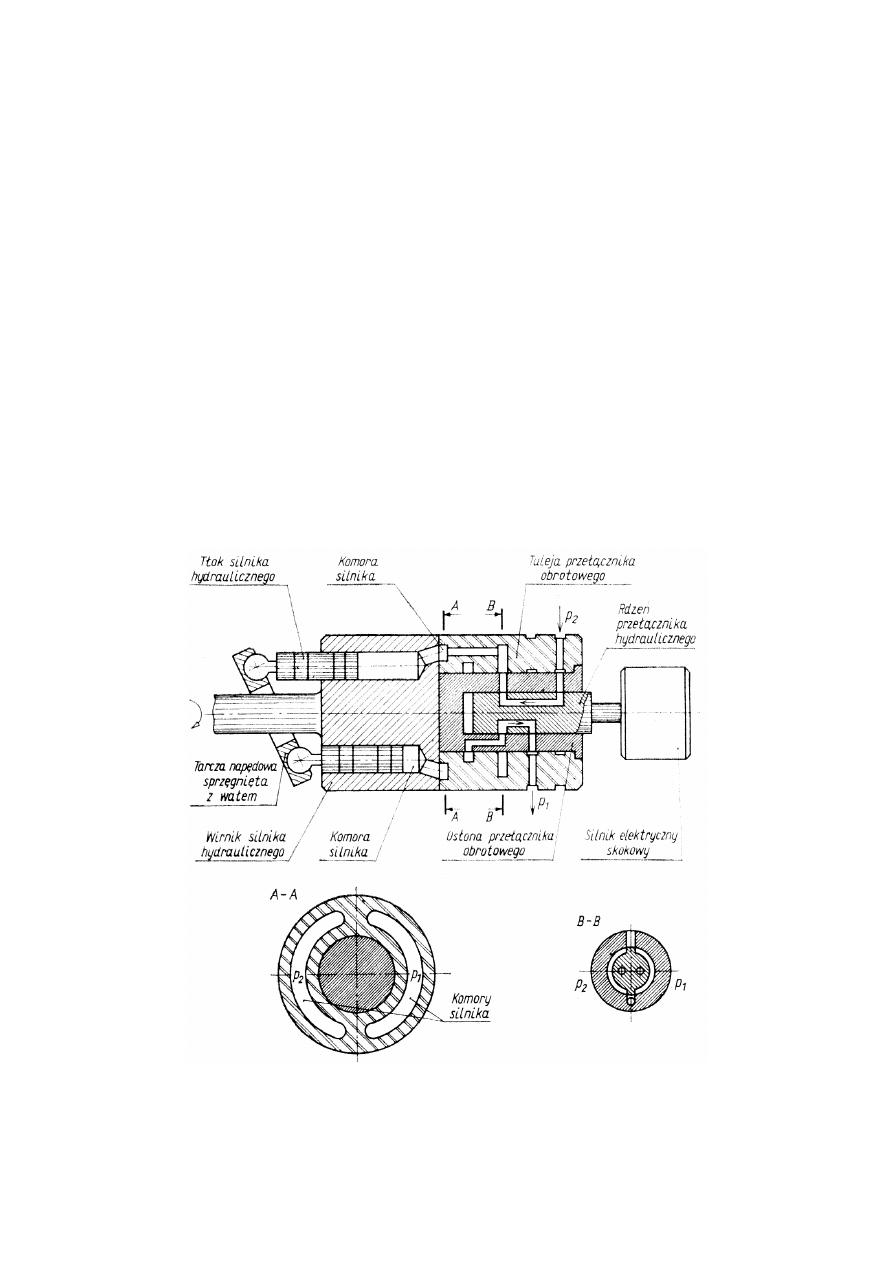
Na rys. 45 przedstawiono budowę silnika ruchu obrotowego. Silnik ten składa się z
klasycznego silnika hydraulicznego ruchu obrotowego (wirnik, tłok, tarcza napędowa
sprzęgnięta z wałem silnika, nieruchoma tuleja przełącznika obrotowego). Silnik hydrauliczny
jest sterowany za pomocą hydraulicznego przełącznika obrotowego składającego się z rdzenia
napędzanego przez silnik skokowy elektryczny oraz osłony sprzęgniętej z wirnikiem i
nieruchomej tulei, na której ślizga się wirnik. Obrót wału silnika skokowego elektrycznego
sprawi, że rdzeń połączy jedną z komór z ciśnieniem wysokim, a drugą komorę – z ciśnieniem
niskim. W wyniku wirnik obróci się, a wraz z nim obróci się osłona nadążająca za ruchem
rdzenia, wskutek czego droga zasilania komór zostanie ponownie przerwana i wirnik silnika
hydraulicznego zatrzyma się. A więc wirnik silnika hydraulicznego wykonuje kroki nadążające,
śledzące kroki silnika skokowego elektrycznego.
Rys. 45. Silnik elektrohydrauliczny skokowy ruchu obrotowego:
p
1
– ciśnienie niskie, p
2
– ciśnienie wysokie
45
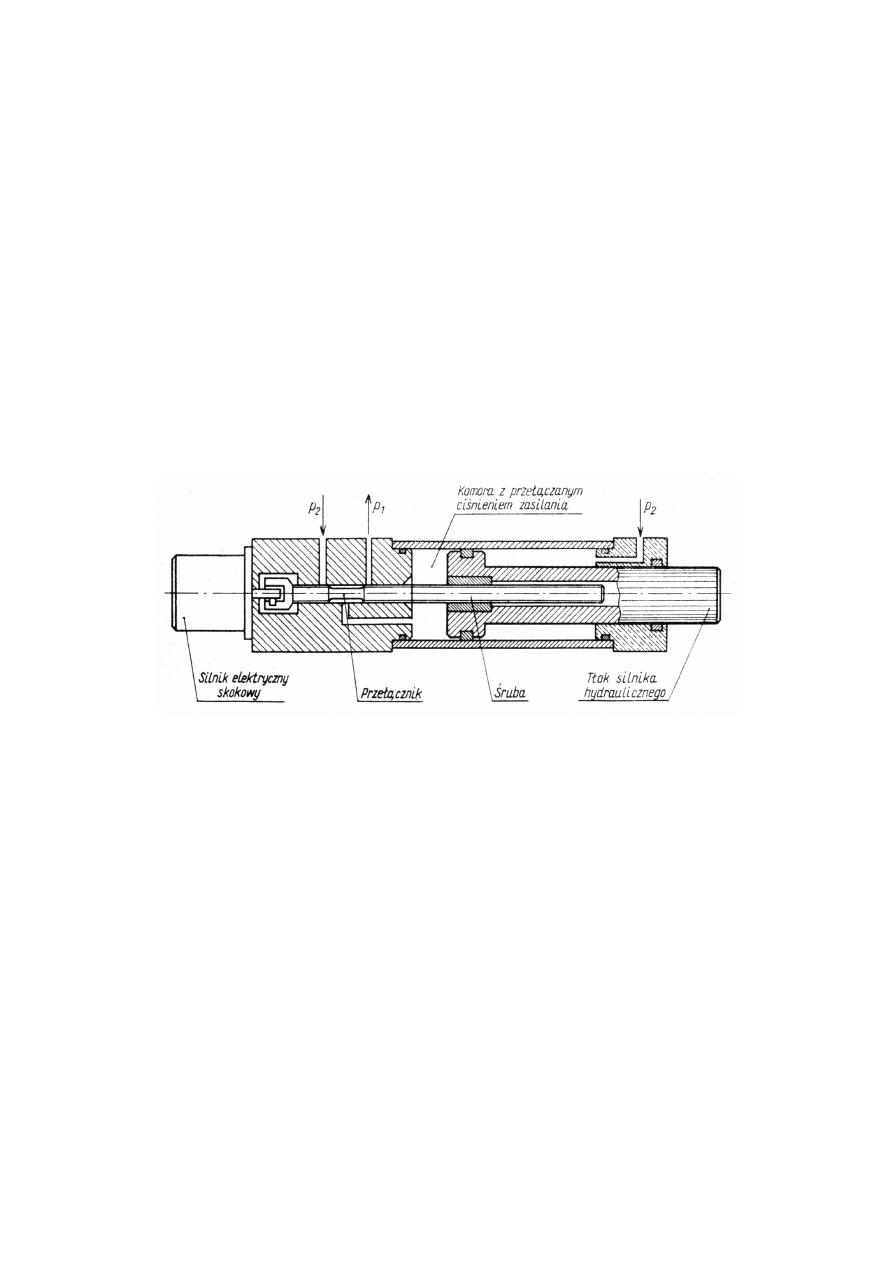
Na rys. 46 przedstawiono budowę silnika ruchu posuwistego. W silniku tym
przełącznik ma dwa tłoki i jest zakończony śrubą wkręcającą się w tłok siłownika hydraulicznego
ruchu posuwistego. Przełącznik zostaje obrócony o kąt krokowy przez sprzęgnięty z nim silnik
skokowy elektryczny. Zależnie od kąta obrotu nastąpi wkręcenie się śruby w tłok lub jej
wykręcenie, co doprowadzi do przesunięcia tłoków przełącznika, w wyniku czego do komory
doprowadzone zostanie ciśnienie wysokie p
2
lub niskie p
1
. Pod wpływem powstałej różnicy sił tłok
zacznie się przesuwać, przy czym przesunięcie to nastąpi zawsze w takim kierunku, by tłoki
przełącznika doprowadzić do pozycji neutralnej. Po osiągnięciu tej pozycji tłok zatrzyma się do
momentu wykonania przez silnik skokowy elektryczny następnego kroku. A więc w
rozpatrywanym rozwiązaniu tłok siłownika hydraulicznego wykonuje przesunięcie krokowe
nadążające za obrotami skokowymi silnika skokowego elektrycznego.
Rys. 46. Silnik elektrohydrauliczny skokowy ruchu posuwistego:
p
1
– ciśnienie niskie, p
2
– ciśnienie wysokie
4.6. Liniowe silniki elektryczne
Na rys. 47 pokazano główne zespoły takiego silnika. Silnik ten składa się z okładek z
wypełnieniem epoksydowym, w którym porusza się magnes stały stanowiący biegnik.
Biegnik porusza się na łożysku pneumatycznym o grubości 0.0132 mm.
Na rys. 48 pokazano fazy ruchu liniowego silnika elektrycznego. Każda nowa faza
pobudzania wywołuje przemieszczenie o 1/4 podziałki ruchu biegnika w stosunku do okienek.
W ten sposób realizuje się ruch o 3/4 podziałki. Na każdym rysunku zwrot kierunku przepływu
prądu zaznaczono strzałkami.
Jeżeli elektromagnes A(EMA) jest pobudzony, maksymalna gęstość przepływu powstaje
w biegunie 2 i ustawienie jest pokazane na rysunku a). Jeżeli A jest niepobudzony, a EMB jest
46
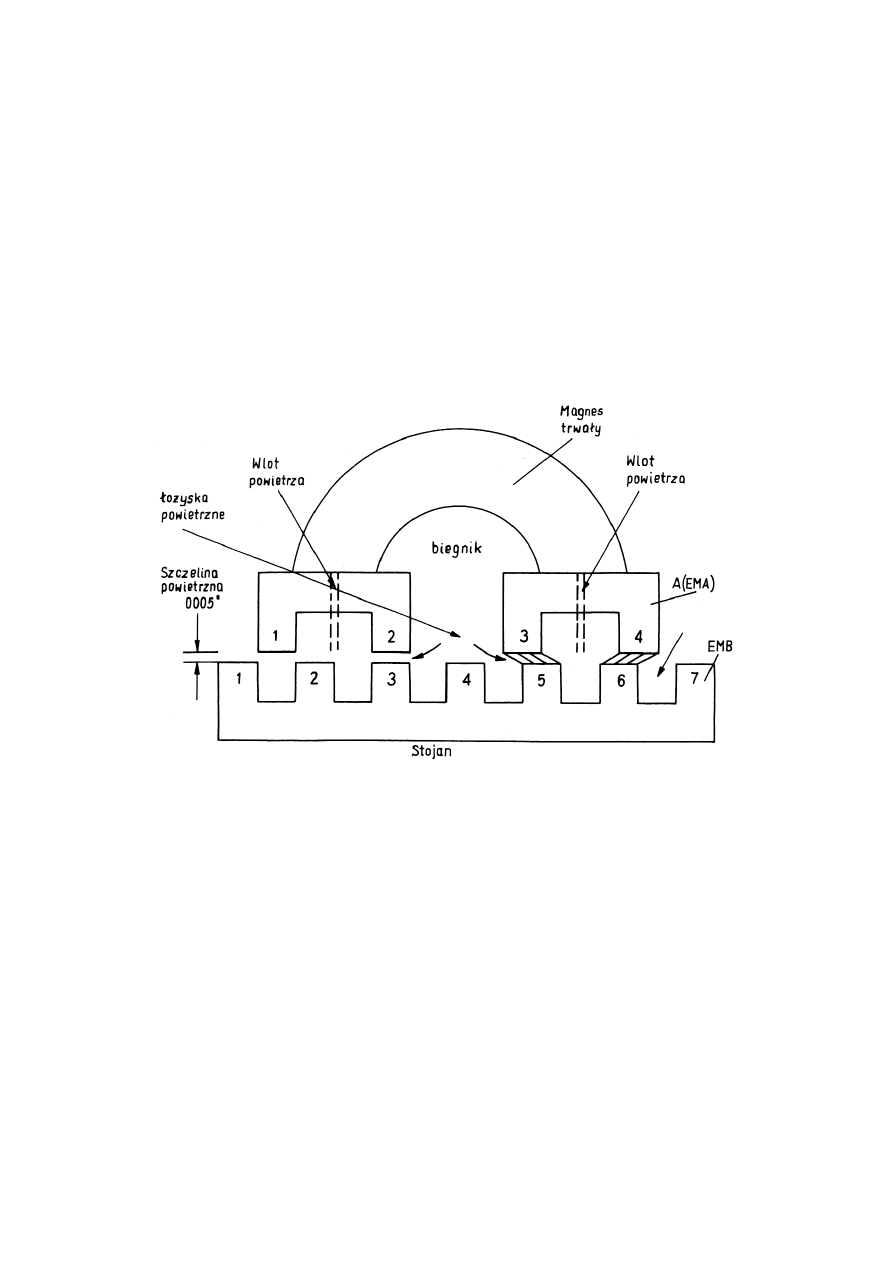
pobudzony, maksymalna gęstość przepływu powstaje w biegunie 3, a minimum gęstości w 4.
Siły przyciągania w biegunie 3 wywołują przesunięcie zęba na prawo.
Czasami liniowy silnik elektryczny umożliwia realizację bezpośredniego napędu
elektrycznego. Na ogół pozycja wirnika względem okładek jest dyskretna. Liniowy silnik
elektryczny ma pełny krok rozdzielności zdefiniowanej przez powierzchnię zęba na biegunach.
Typowa podziałka wynosi 1.016 mm. Dla sekwencji pokazanej na rysunku rozdzielność wynosi
1/4 podziałki, tzn. 2.6 mm. Te pozycje nazywa się czasami "podstawowym krokiem".
Możliwe jest również rozwiązanie konstrukcyjne liniowego silnika elektrycznego z
dwoma ortogonalnymi biegnikami w jednej ramie.
Rys. 47. Główne zespoły dwufazowego liniowego silnika elektrycznego
(General Signal Corp. Santa Clara, CA)
47
Rys. 48. Fazy ruchu dwufazowego liniowego silnika elektrycznego
4.7. Silnik elektryczny stanowiący bezpośredni napęd elektryczny
W latach osiemdziesiątych został zaprojektowany nowy rodzaj silnika elektrycznego,
który umożliwia realizację bezpośredniego napędu elektrycznego robota (z
wyeliminowaniem przekładni zębatej). Ten nowy przetwornik elektromechaniczny został
wyprodukowany przez Motornetics Corporation i został nazwany "Megatorąue motor
system". Wytwarza on duży moment obrotowy, tzn. 507-14480 Nm przy małych wartościach
prędkości obrotowych (0.5 obr/s) bez potrzeby stosowania reduktora prędkości obrotowej.
Ponadto częścią integralną silnika elektrycznego jest czujnik położenia, który umożliwia
rozdzielczość impulsów porównywalną z optoelektronicznymi impulsatorami położenia
stosowanymi obecnie w manipulatorach.
Silnik elektryczny typu Megatorque jest trójfazową maszyną elektryczną prądu
przemiennego wyposażoną w komutator elektroniczny, podobnie jak komutatorowy silnik
prądu stałego z komutatorem mechanicznym. Jest on maszyną elektryczną o zmiennej
reluktancji i nie ma magnesów stałych.
48
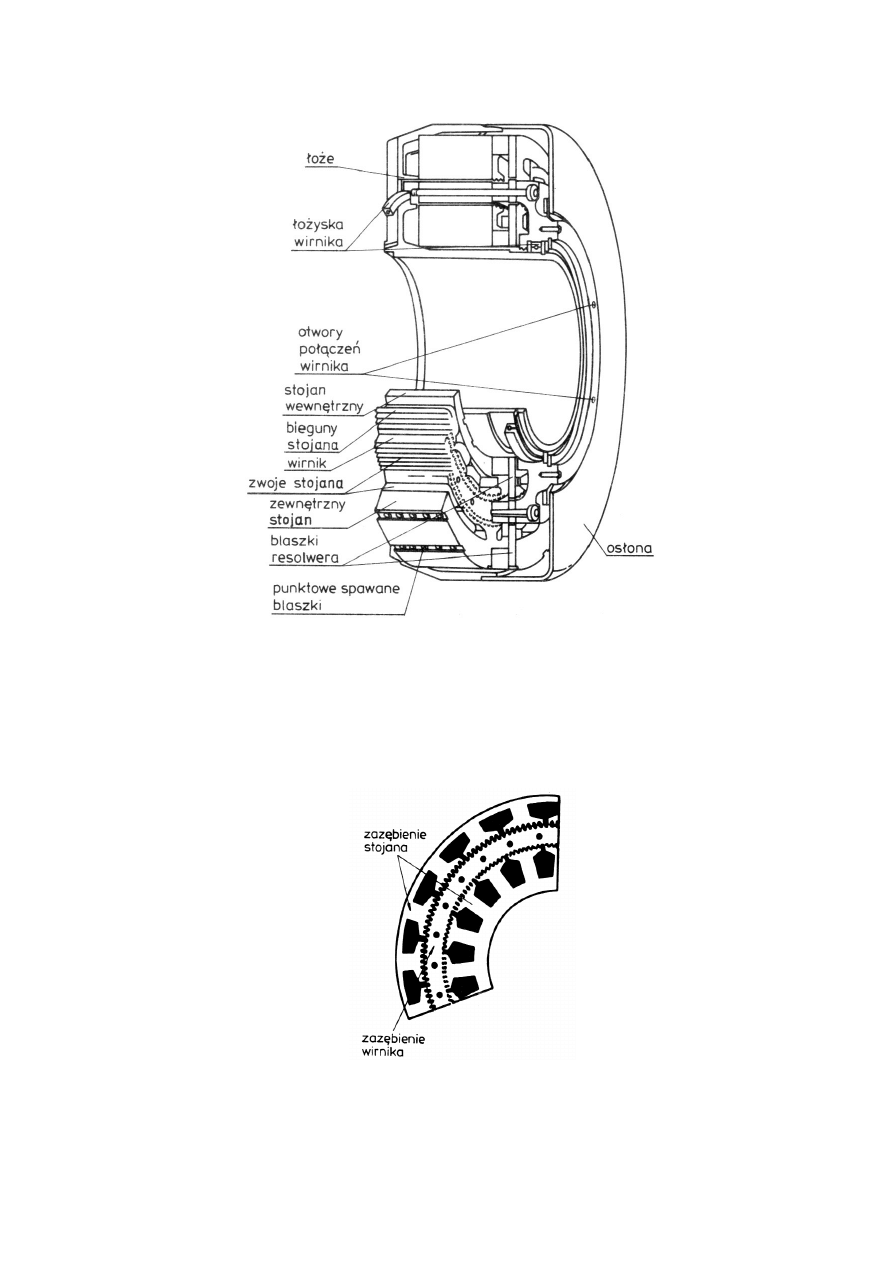
Rys. 49. Przekrój silnika typu Megatorque – napęd bezpośredni
(B. Powell i Motornetics Corp. finans. SK, Santa rosa, CA)
Model 1140
Rys. 50. Ćwiartka sekcji blaszki silnika typu Megatorque z dwoma
stojanami ulokowanymi wokół wirnika
49

Sercem silnika jest zespół blaszek, które łączą wirnik i stojan. Na rys. 50 pokazano
przykład takiej blaszki. Z rysunku wynika, że cienki obrączkowy wirnik jest zamontowany
między dwoma koncentrycznymi stojanami. Oba stojany oddziałują na wirnik i wytwarzają
wzmocniony moment obrotowy. Duża liczba zębów magnetycznych wirnika i dwa stojany
powodują wytwarzanie dużej wartości momentu obrotowego.
Trójfazowe pole magnetyczne jest wytwarzane przez 36 zezwojów dwóch uzwojeń
stojanów (18 zezwojów na każdy z dwóch stojanów), Każdy ze stojanów ma 150 zębów, wirnik
zaś działa jak biegun silnika elektrycznego. Moment obrotowy jest wytwarzany przez
sekwencyjne wzbudzanie zezwojów tych 12 biegunów. Dla jednego obrotu wirnika występuje
150 zmiennych cykli, które dają przełożenie 150:1, co koresponduje ze wzmocnieniem
momentu obrotowego elektromechanicznego.
Należy zauważyć, że zastosowane w tym rozwiązaniu konstrukcyjnym umieszczenie
wirnika między dwoma stojanami umożliwia uzyskanie takich samych parametrów
znamionowych, jakie miałby konwencjonalny silnik elektryczny z 300 biegunami lub 900
zezwojami uzwojenia stojana. Inną zaletą umieszczenia wirnika między dwoma stojanami jest
skrócenie drogi przepływu strumienia magnetycznego.
5. Mechanizmy przekazywania ruchu stosowane w robotach
Mechanizmy przekazywania ruchu służą do transmisji ruchu silnika (silników) do
członów otwartego łańcucha kinematycznego manipulatora lub robota zawierającego pary
kinematyczne - obrotowe lub postępowe.
W niektórych przypadkach, kiedy mamy do czynienia z zamkniętymi łańcuchami, np.
mechanizm pantografu, człony poruszają się jednocześnie i mechanizmy przekazywania napędu
są lokowane w inny sposób.
Należy zdawać sobie sprawę, że przy przekazywaniu ruchu, ze względu na luzy w parach,
tarcie, podatność, obciążenia, występują zjawiska dynamiczne (drgania), które wpływają
niekorzystnie na pozycjonowanie chwytaka. Stąd rozmieszczenie siłowników oraz różnych
przekładni powinno być takie, aby zmniejszyć niekorzystny wpływ zjawisk dynamicznych i
statycznych.
5.1. Przekładnie pasowe
50
Wyszukiwarka
Podobne podstrony:
CHRAPEK,podstawy robotyki, Nap dy robotów nap dy pneumatyczne
CHRAPEK,podstawy robotyki, Nap dy robotów nap dy hydrauliczne
CHRAPEK,podstawy robotyki, Metodyka wprowadzania robotów do przemys u
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
CHRAPEK,podstawy robotyki, elementy sk adowe i struktura robotów
CHRAPEK,podstawy robotyki, Przyk ady konstrukcji robotów przemys owych
CHRAPEK,podstawy robotyki, Rozwój robotów
CHRAPEK,podstawy robotyki, Sterowanie robotów przemys owych
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
więcej podobnych podstron