Politechnika Wrocławska
Instytut Maszyn, Napędów i Pomiarów
Elektrycznych
Materiał ilustracyjny
do przedmiotu
ELEKTROTECHNIKA
(Cz. 5)
Prowadzący:
Dr inż. Piotr Zieliński (I-29, A10 p.408, tel. 320-32 29)
Wrocław 2003/4
Silniki indukcyjne
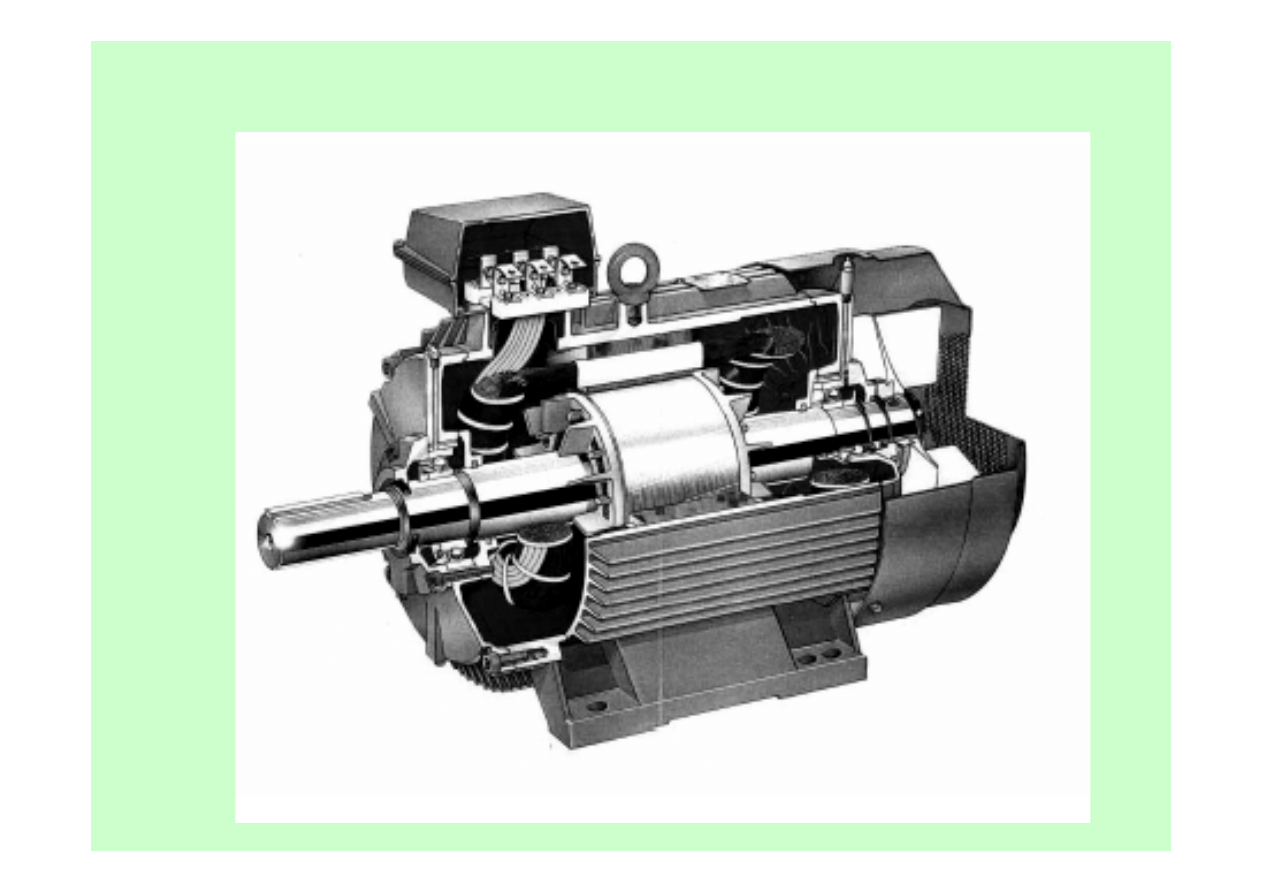
Budowa silnika indukcyjnego
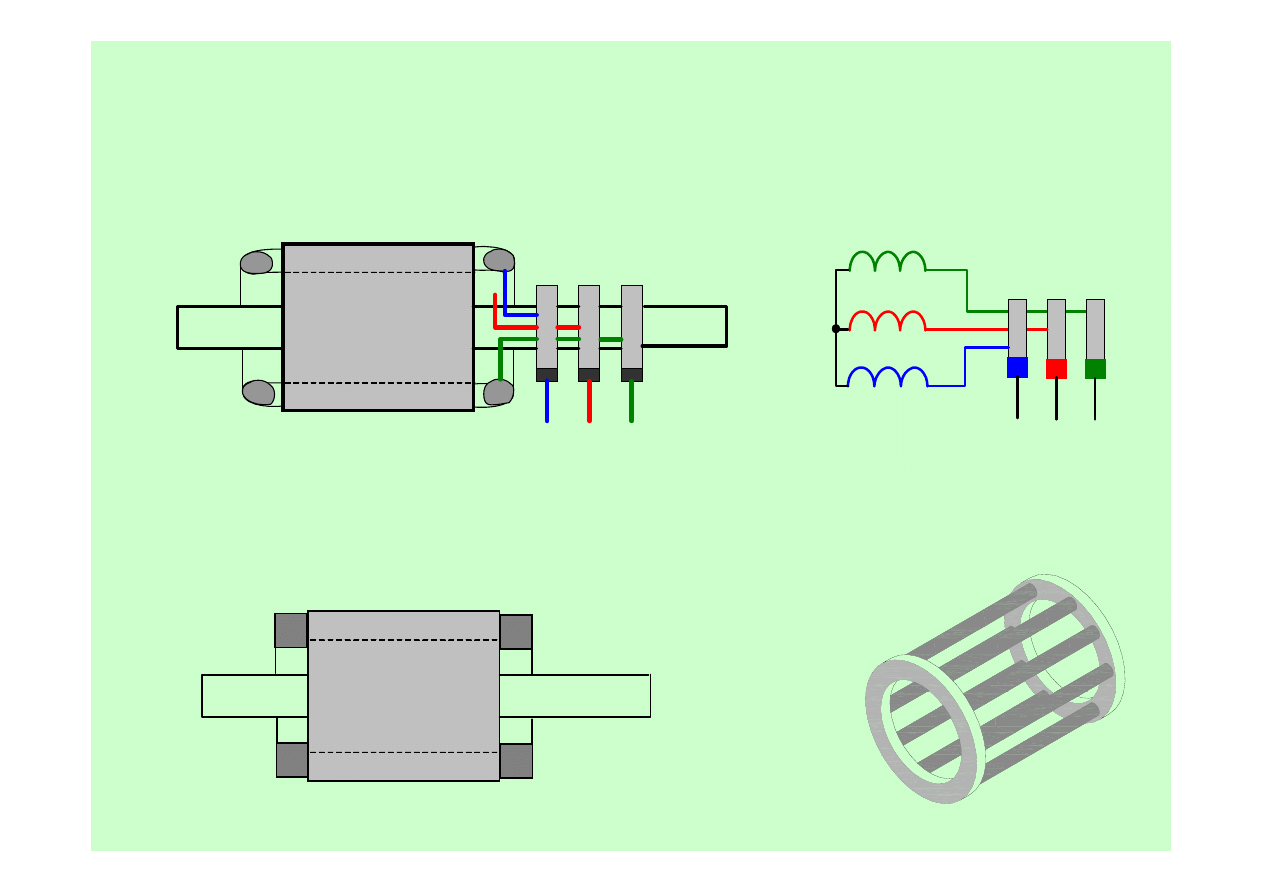
Rodzaje budowy wirników
silników indukcyjnych
pierścieniowy
klatkowy
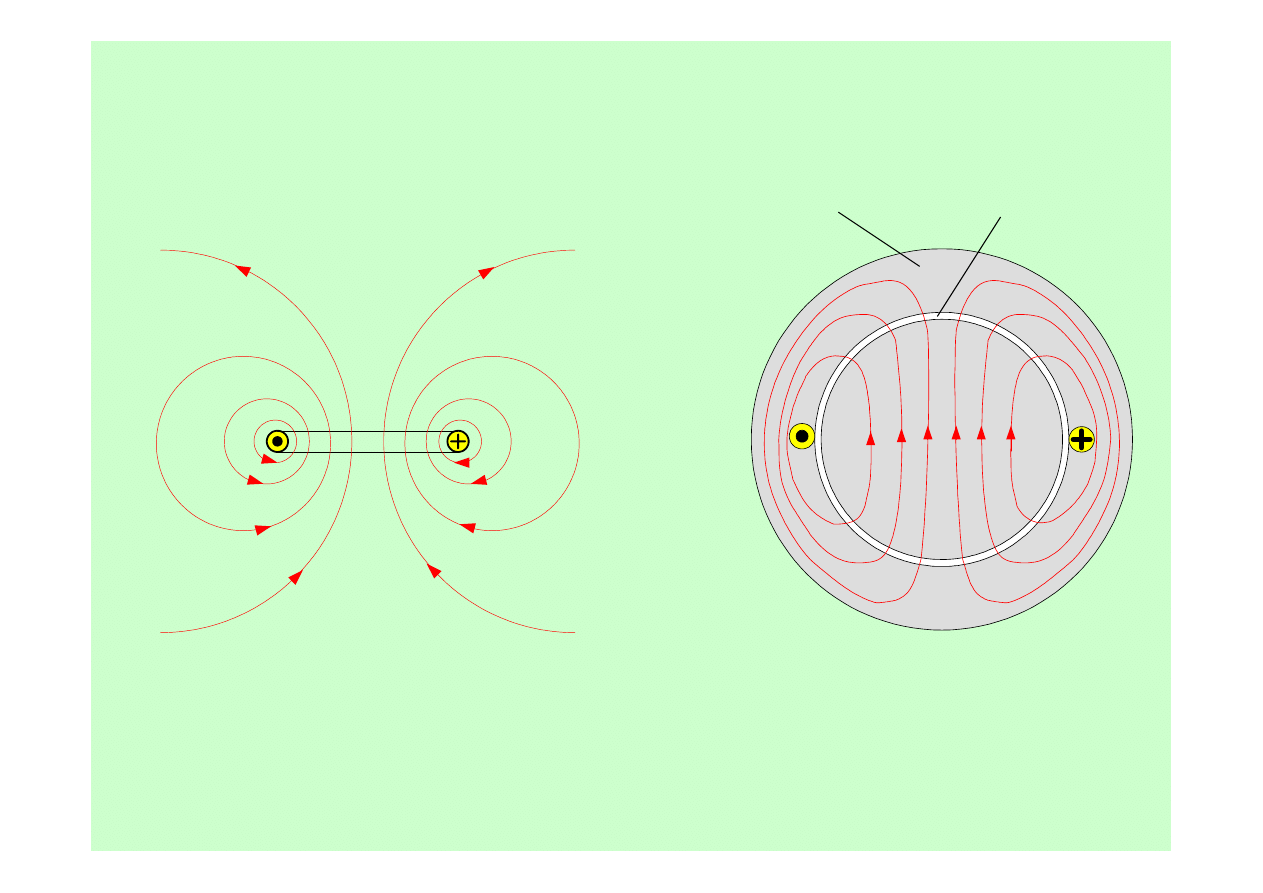
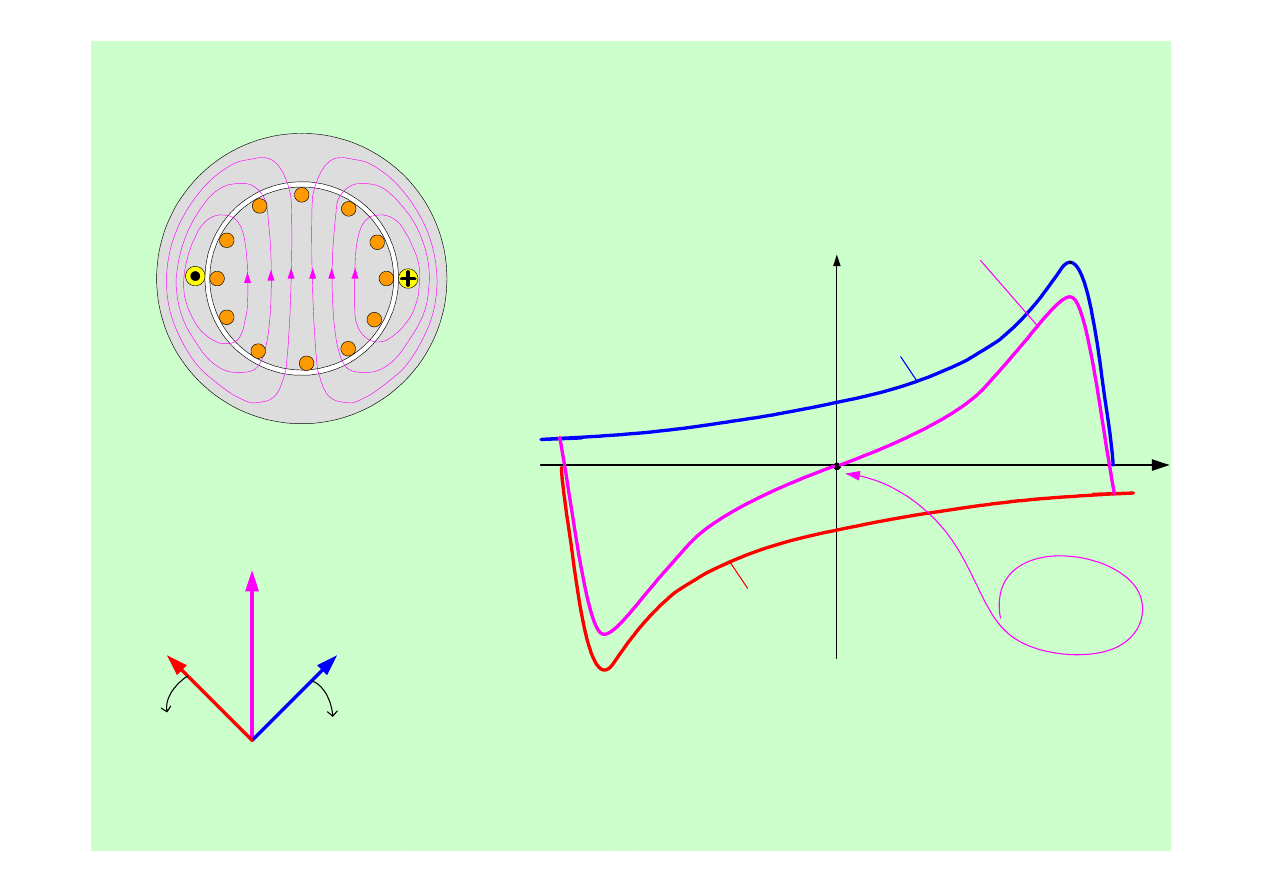
Obwód magnetyczny silnika indukcyjnego
µ
δ
=
µ
0
µ
Fe
µ
0
Strumień magn. cewki z prądem w
ośrodku o
µ
=
µ
0
.
Strumień magn. cewki z prądem w
rdzeniu stojana silnika o
µ
Fe
>>
µ
0
.
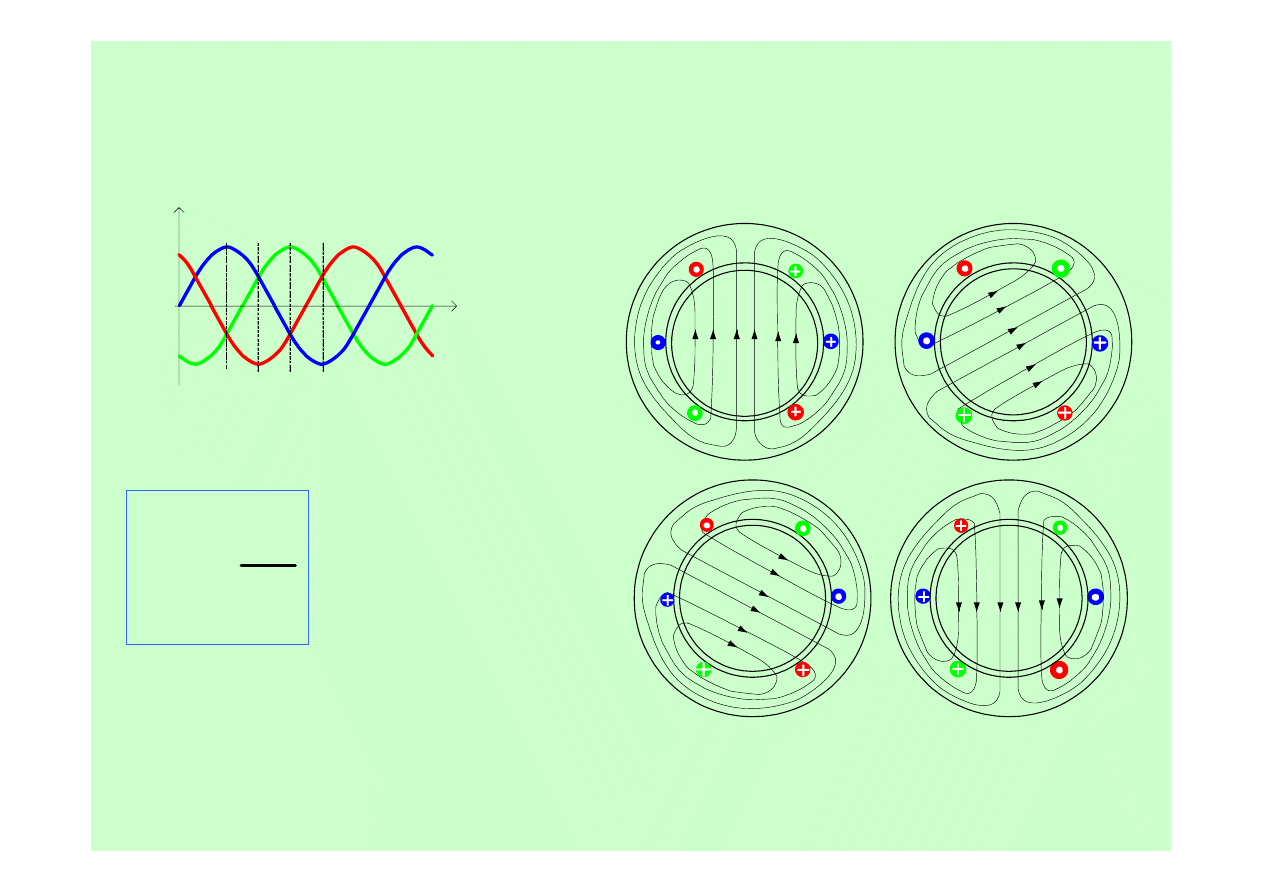
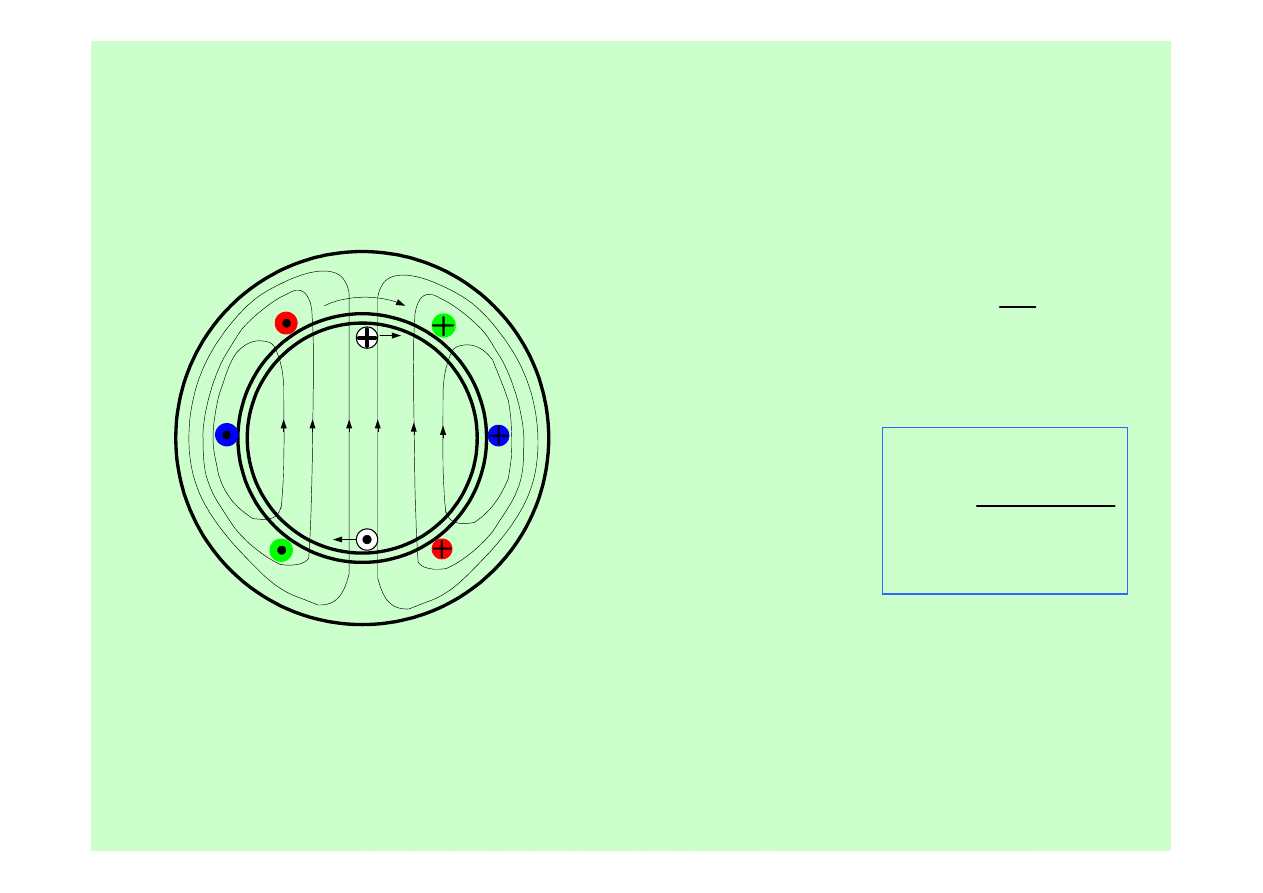
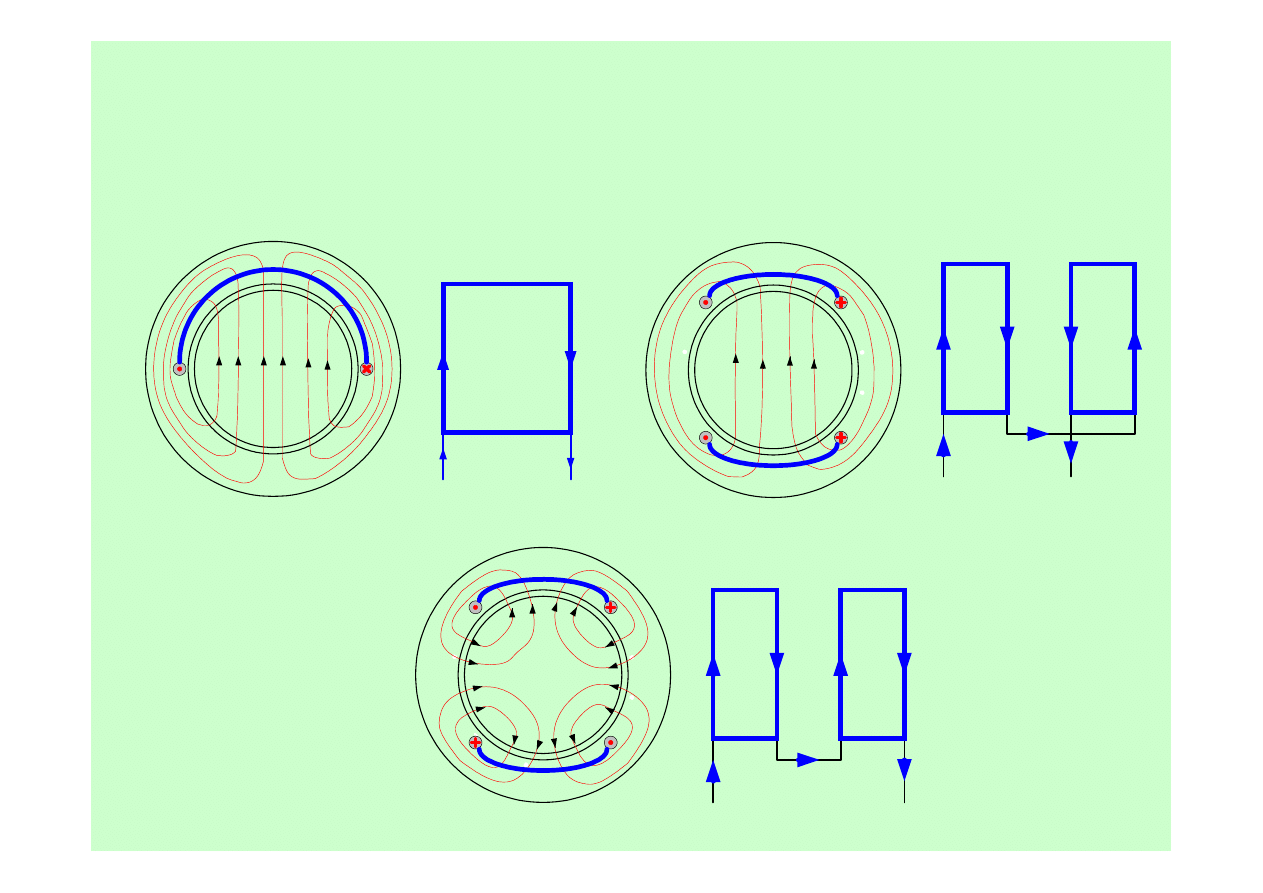
Powstawanie strumienia wirującego
i
i
a
i
b
i
c
ω t
t
1
t
3
t
2
t
4
t
1
t
3
t
2
t
4
p
f
n
=
(obroty na sekundę)
gdzie:
f – częstotliwość
p – liczba par biegunów.
Zasada działania silnika
indukcyjnego
F
F
ω
φ
p
f
n
s
=
n
s
– prędkość obr. wirującego strumienia magn.
s
s
n
n
n
s
−
=
Poślizg -
gdzie:
n – prędkość obrotowa wirnika
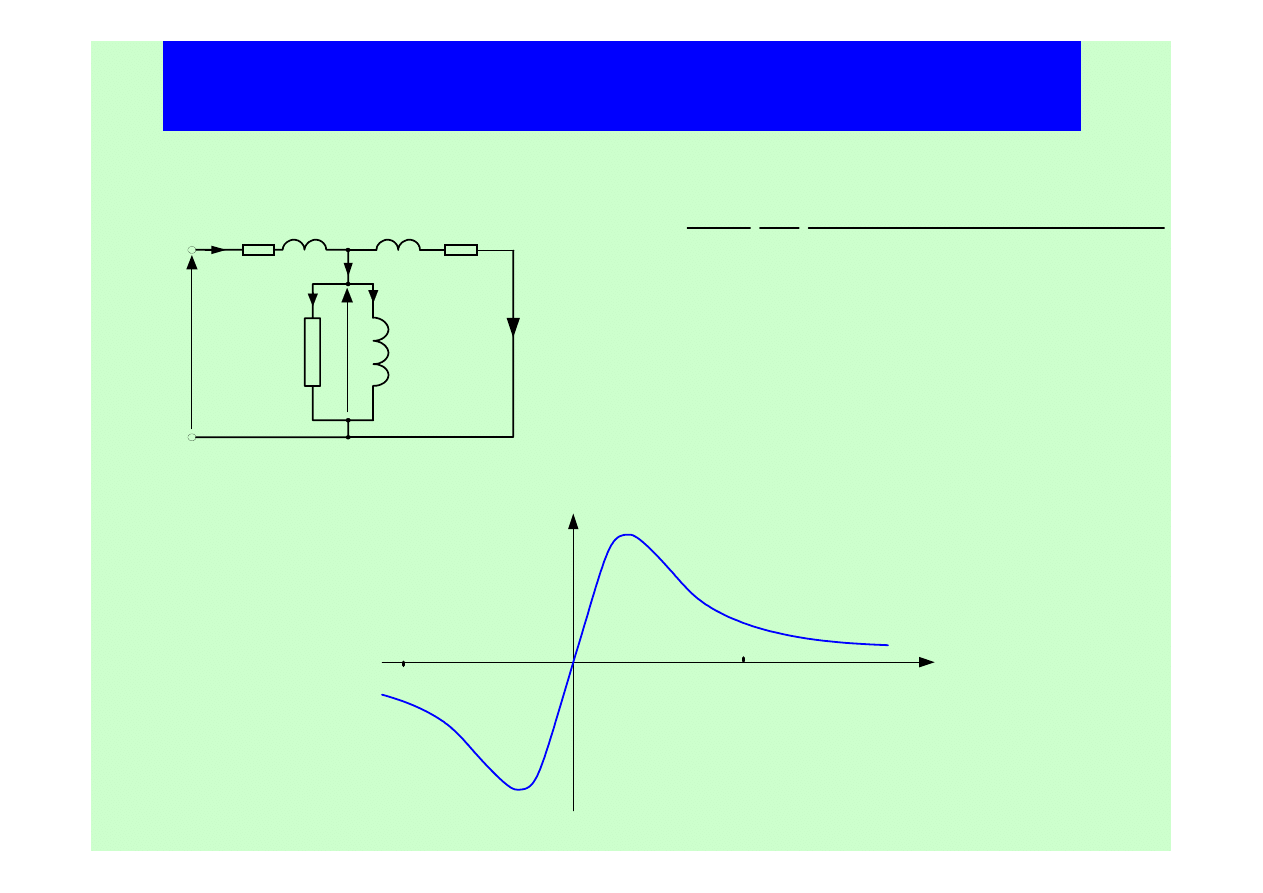
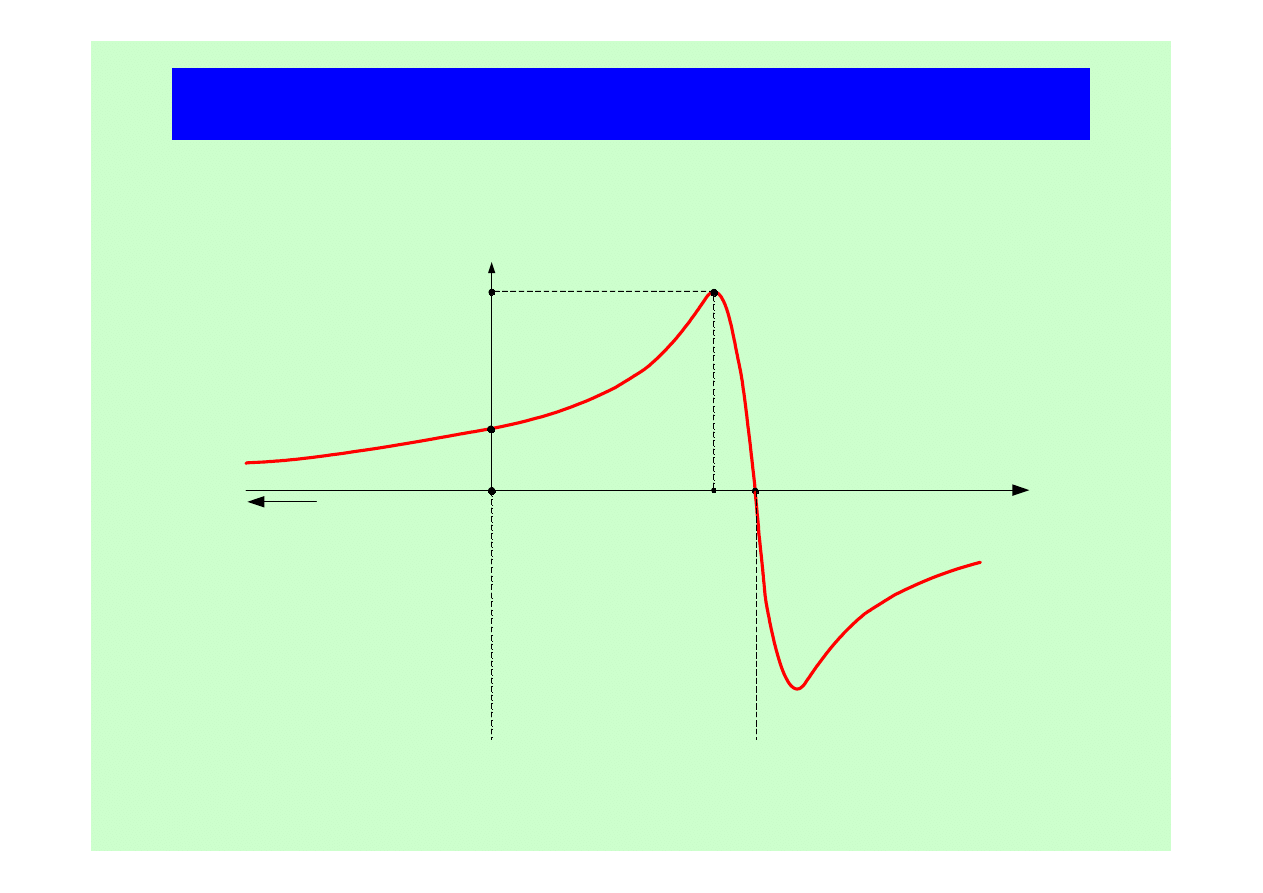
Moment obrotowy maszyn indukcyjnych
2
'
2
1
2
'
2
1
2
1
'
2
)
(
)
/
(
6
,
28
X
X
s
R
R
U
s
R
n
M
s
+
+
+
≈
I
m
E
X
m
R
Fe
R
1
X
r1
I
1
I
Fe
X’
r2
I’
2
I
0
R’
2
/s
U
1
M – moment obrotowy (N.m)
n
s
– synchroniczna prędkość obr. (obr/min)
poślizg (s)
M
0
1
-1
U=const
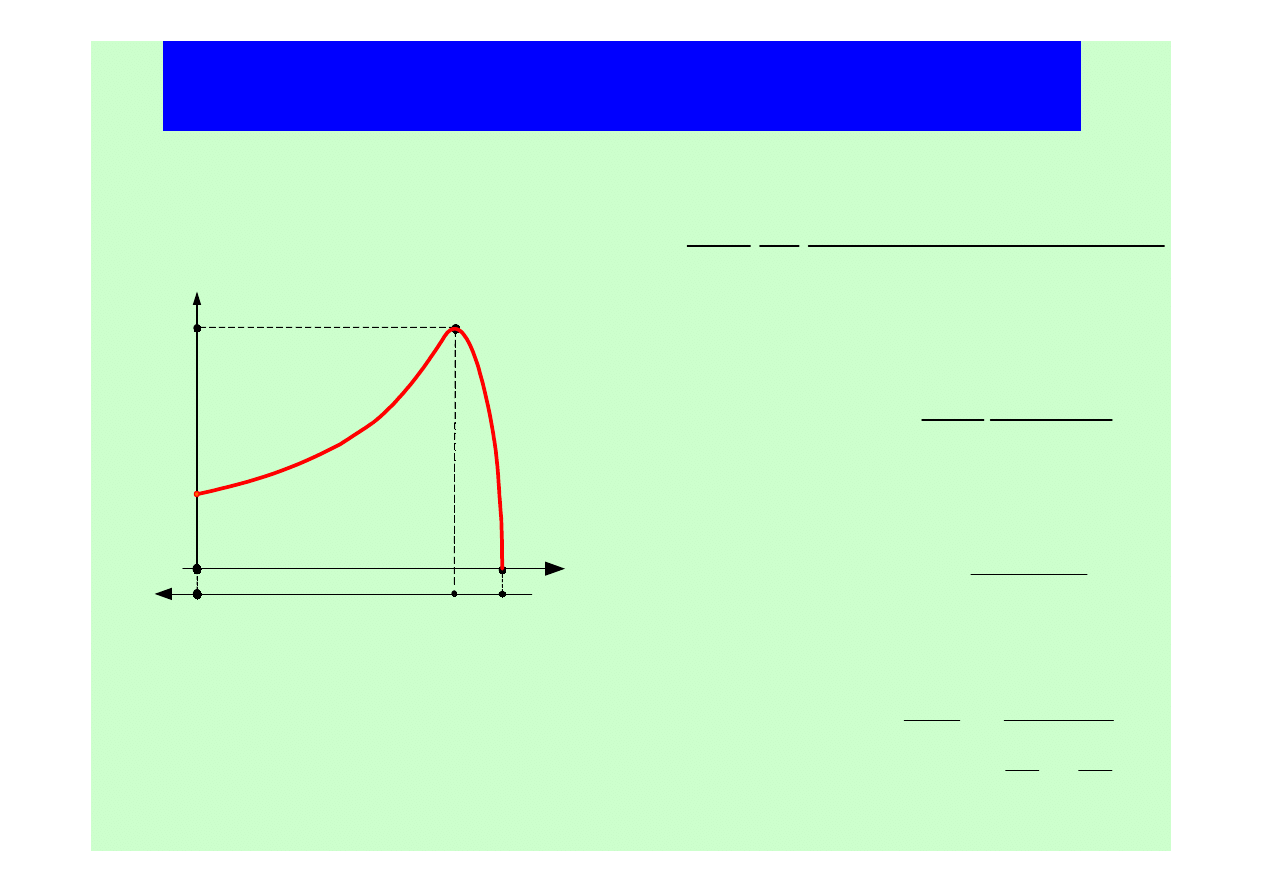
Rodzaje pracy maszyny indukcyjnej
M
max
M
r
n
n
s
s=0
s=1
S
n=0
M
s
k
Praca
hamulcowa
Praca
silnikowa
Praca
prądnicowa
Podstawowe zależności między parametrami maszyn
indukcyjnych
2
'
2
1
2
'
2
1
2
1
'
2
)
(
)
/
(
6
,
28
X
X
s
R
R
U
s
R
n
M
s
+
+
+
=
M
max
M
r
n
n
s
s=0
s=1
S
n=0
M
s
k
'
2
1
2
1
max
3
,
14
X
X
U
n
M
s
+
=
'
2
1
'
2
X
X
R
s
k
+
=
k
k
k
s
s
s
s
M
M
+
=
2
Wzór Klossa
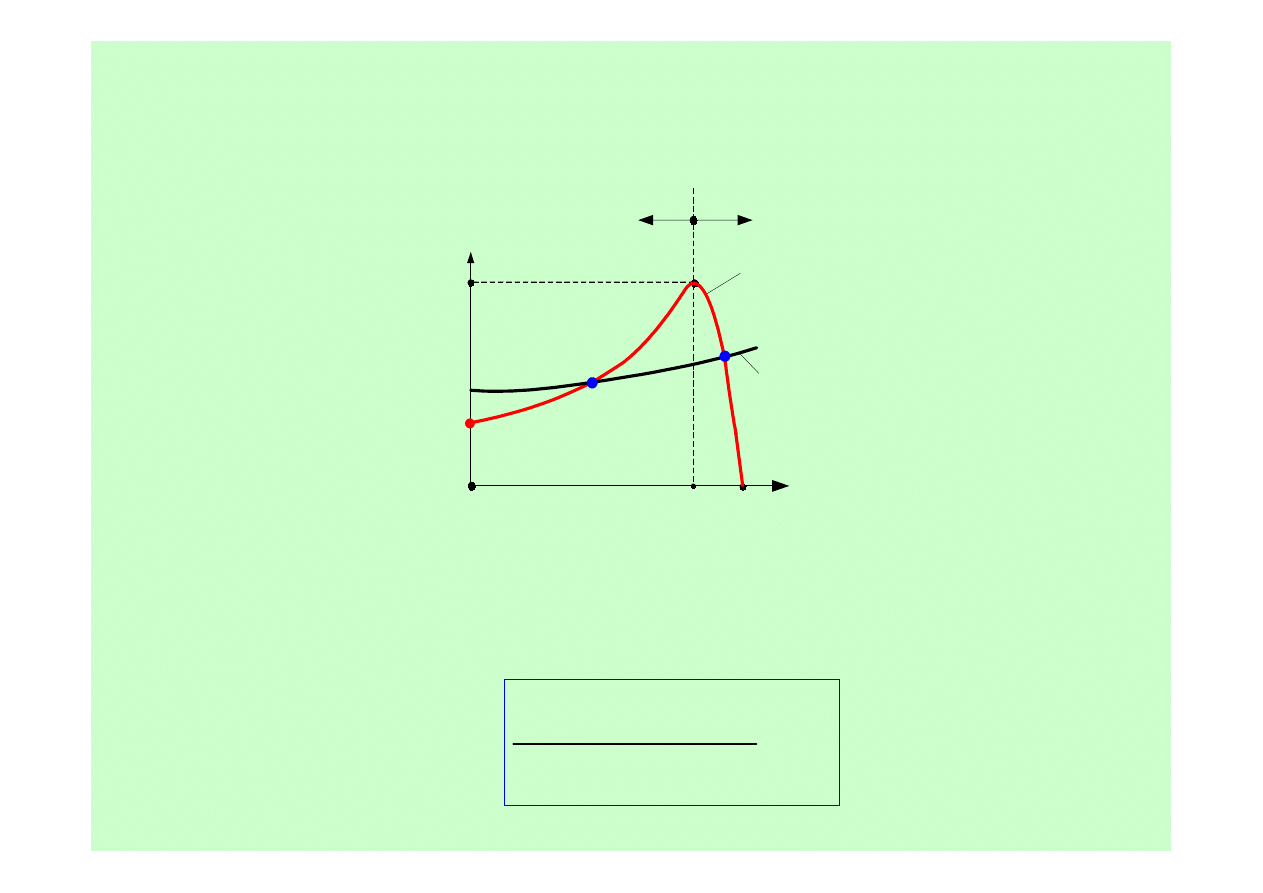
Zakres pracy stabilnej
M
max
M
r
n
n
s
n=0
M
s
k
A
B
Moment
oporowy
Moment
napędowy
Praca stabilna
Praca niestabilna
Dany punkt jest punktem pracy stabilnej jeśli w jego sąsiedztwie jest
spełniony warunek:
0
)
(
<
−
dn
M
M
d
o
n
Rozruch bezpośredni
U
3f
n
0
M, I
M
Ι
n
n
Ι
r
Ι
n
Μ
r
Μ
n
8
5
÷
=
n
r
I
I
5
,
1
8
,
0
÷
=
n
r
M
M
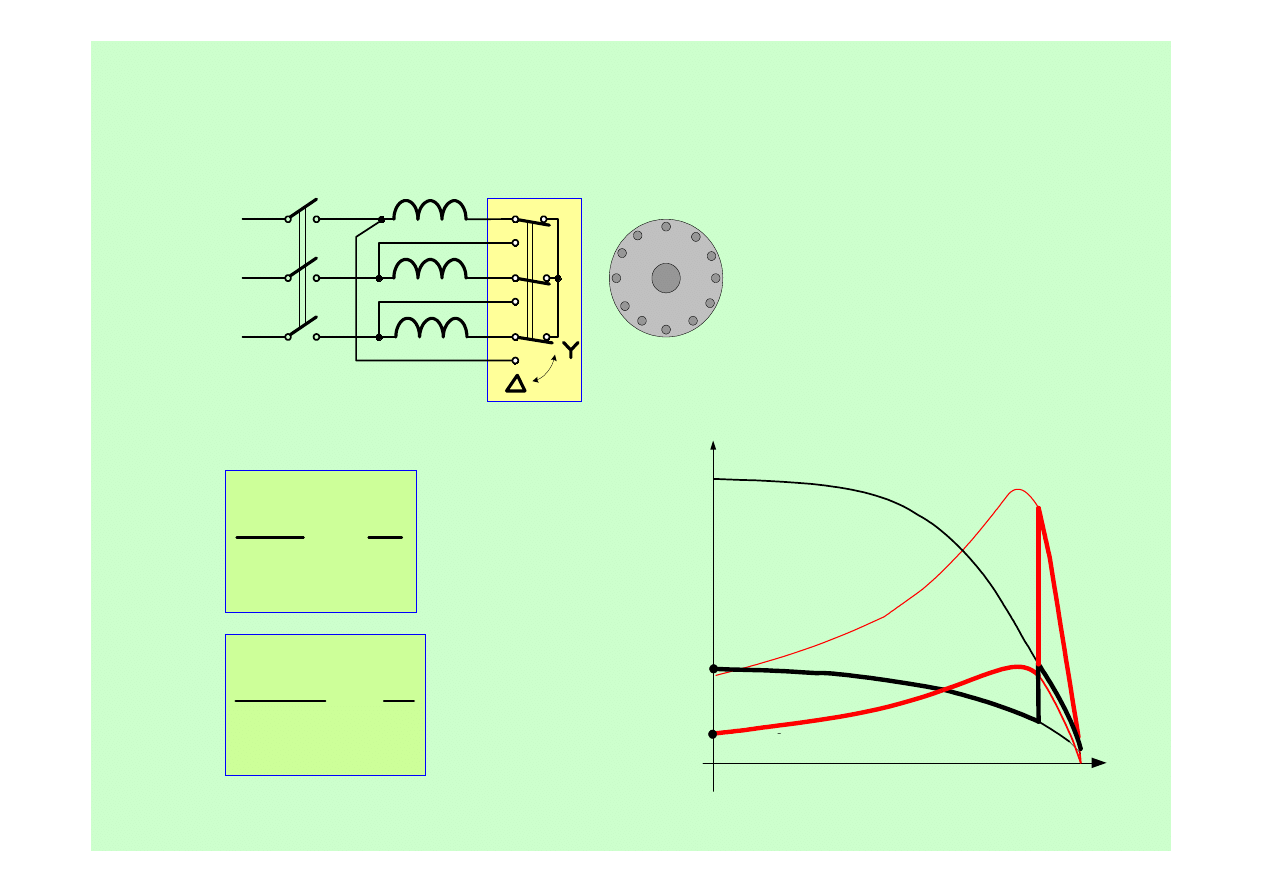
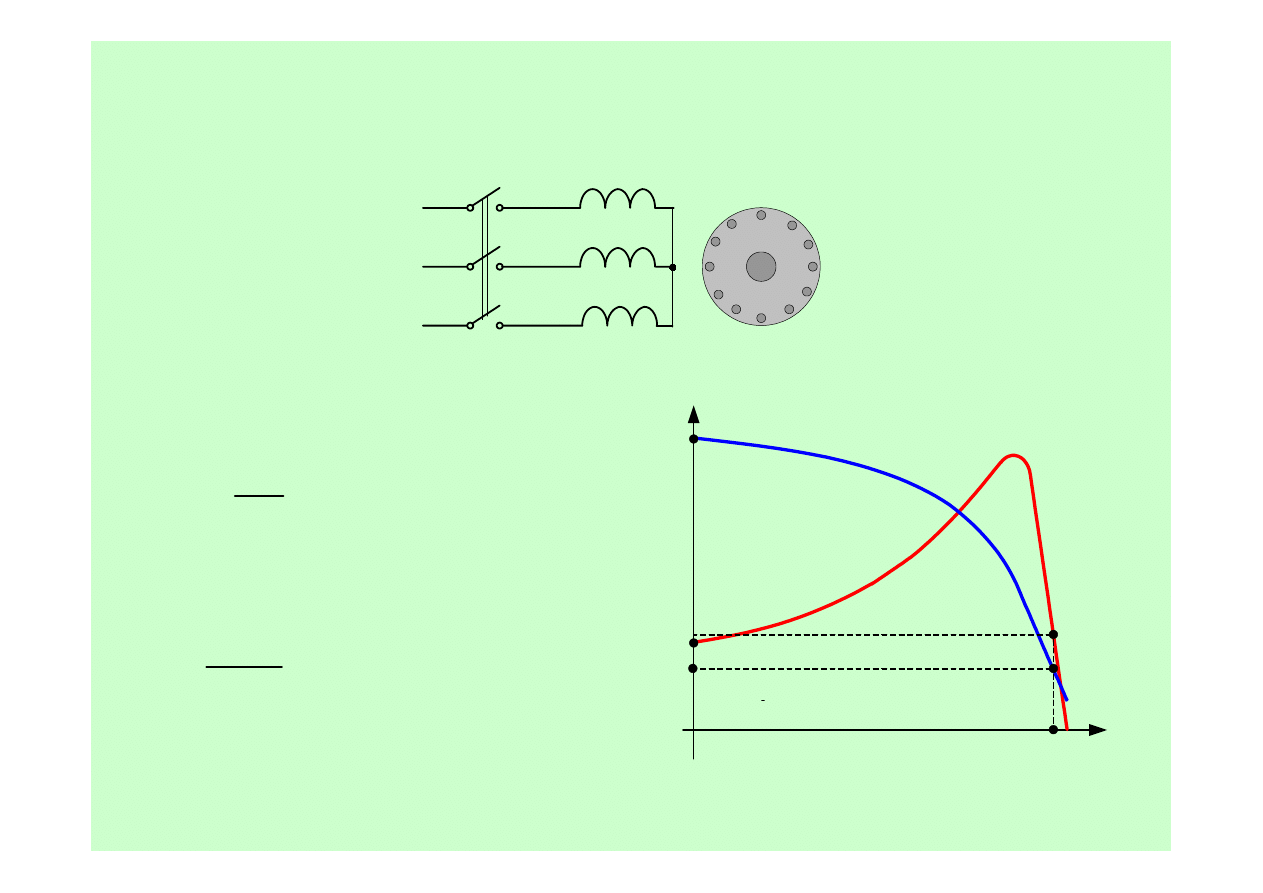
Rozruch z przełącznikiem gwiazda/trójkąt
U
3f
Przełącznik
gwiazda / trójkąt
n
0
M, I
M
∆
M
Y
Ι
∆
I
Y
M
rY
I
rY
3
1
Y
=
∆
I
I
3
1
Y
=
∆
M
M
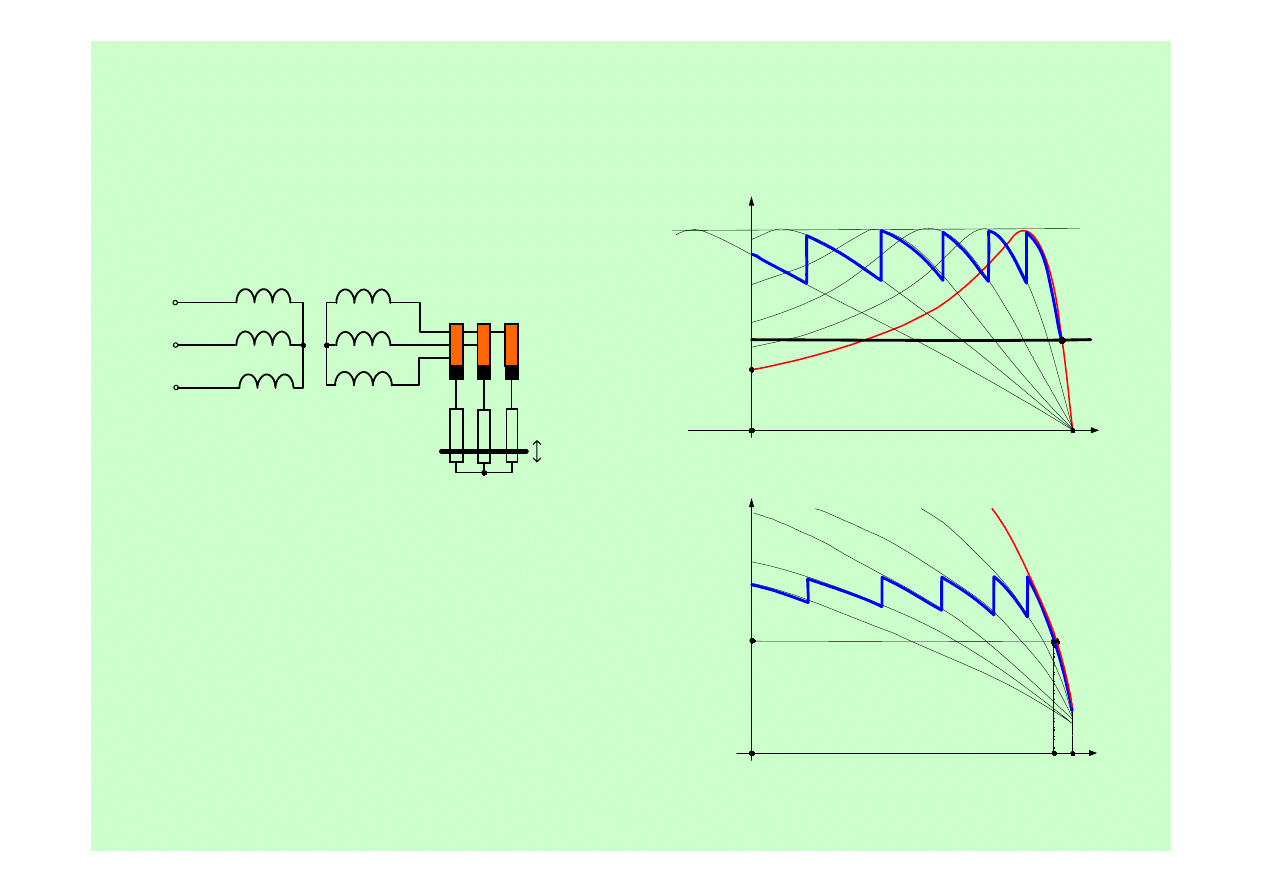
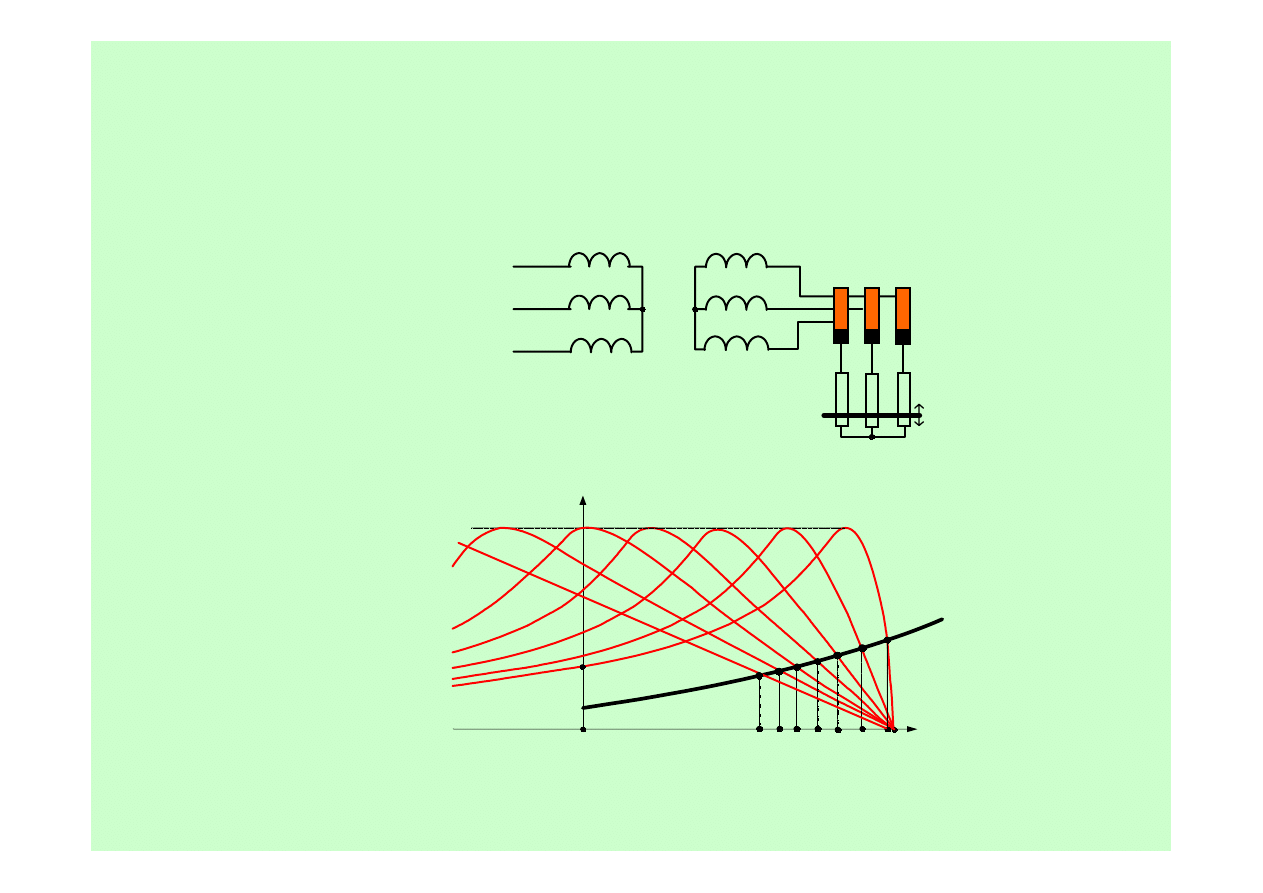
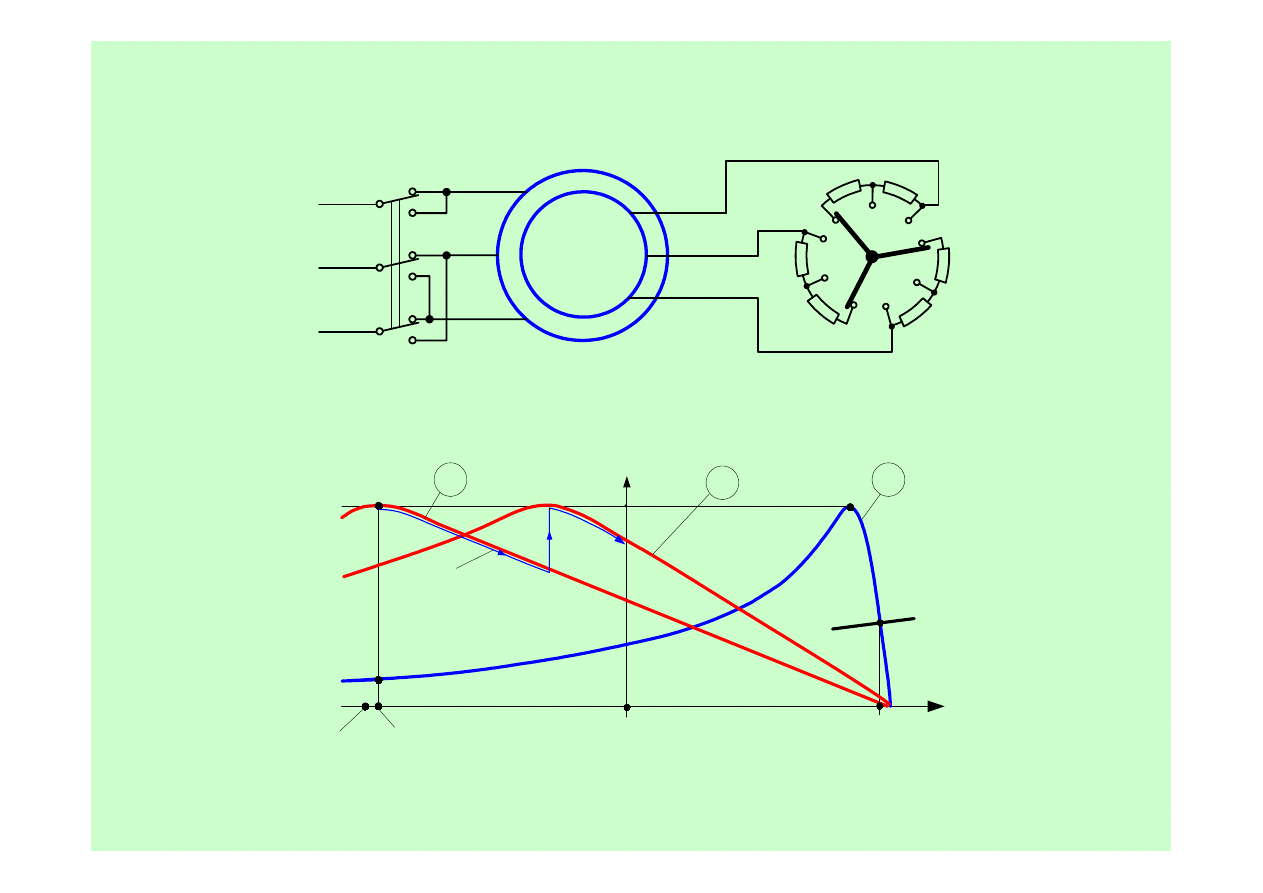
Rozruch silnika pierścieniowego
M
max
n
S=0
S=1
n=0
M
n
s
R
r1
R
r2
R
r3
R
r4
R
r5
R
r
=0
R
r1
R
r2
R
r3
R
r4
R
r5
R
r
=0
n
S=0
S=1
n=0
I
n
n
I
n
M
obc
rozrusznik
stojan
wirnik
U
3f
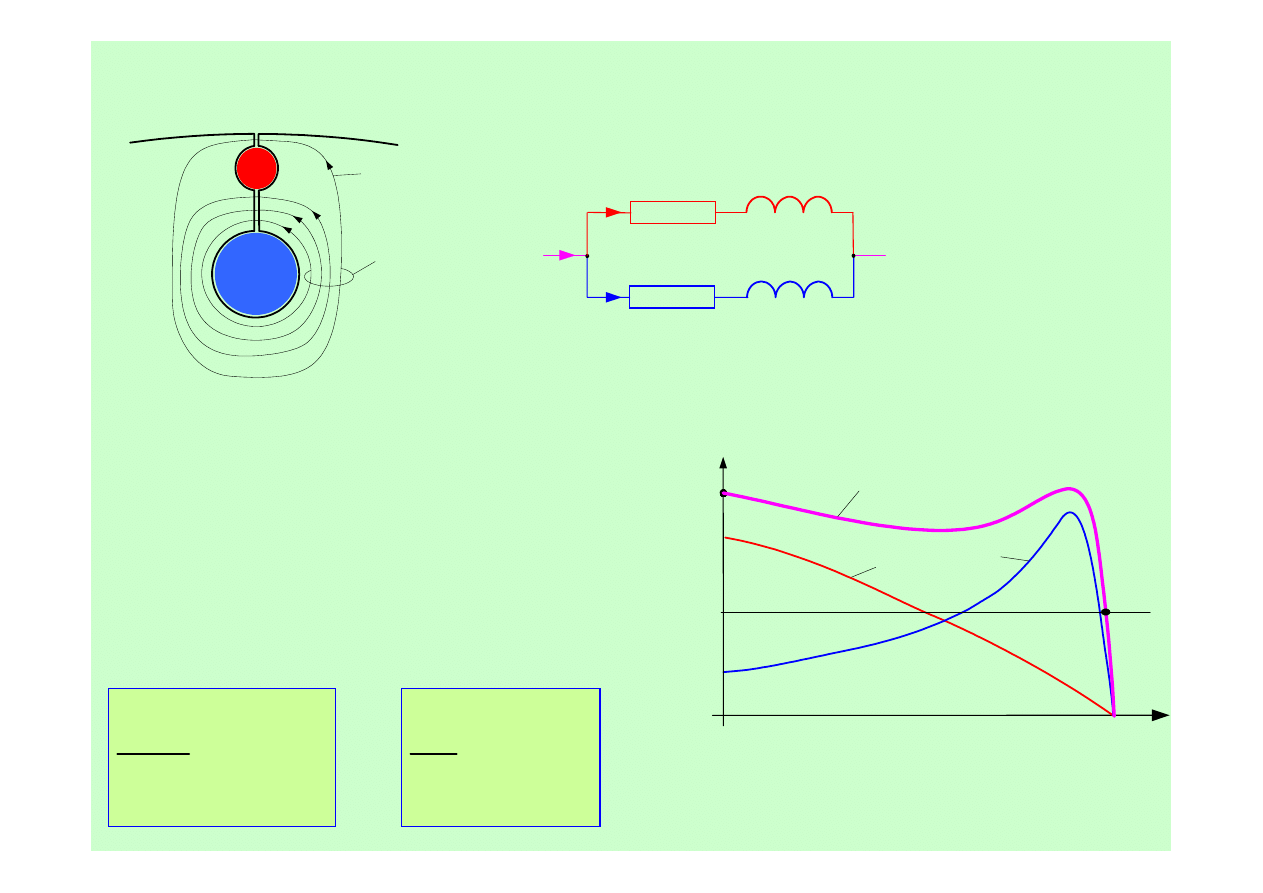
Silniki dwuklatkowe
F
g
F
r
g
r
R
R
>
R
r
2
π f
2
L
r
R
g
2
π f
2
L
g
I
g
I
r
g
r
L
L
<
W pierwszej chwili rozruchu: f
2
=50Hz
M
r
n
0
M=M
r
+M
g
M
g
M
M
n
g
r
Z
Z
<<
g
r
I
I
>>
Po rozruchu: f
2
=1- 3 Hz
g
r
Z
Z
>>
g
r
I
I
<<
3
2
÷
=
n
r
M
M
5
3
÷
=
n
r
I
I
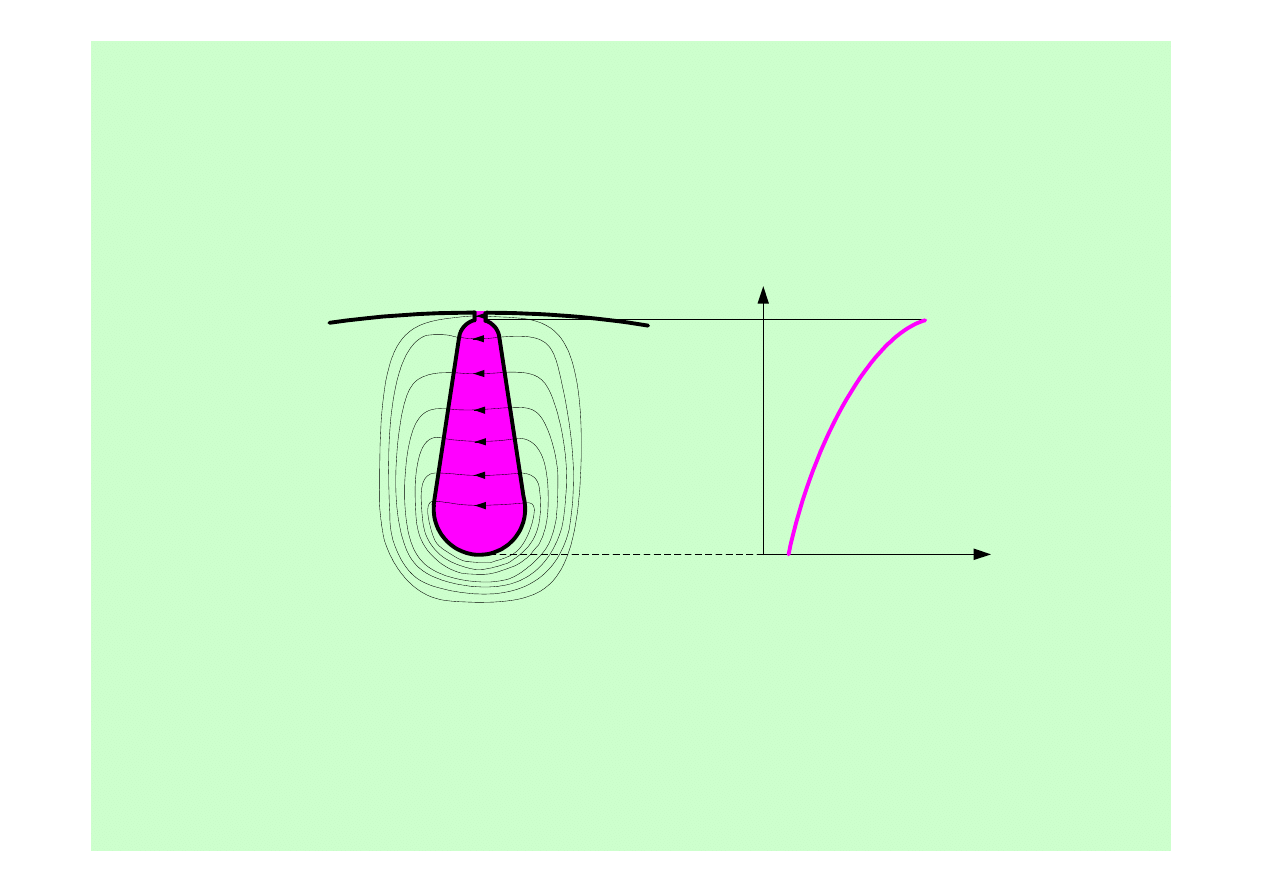
Wirniki głębokożłobkowe
Zjawisko wypierania prądu ze żłobka
Gestosc pradu
Wysokosc p
reta
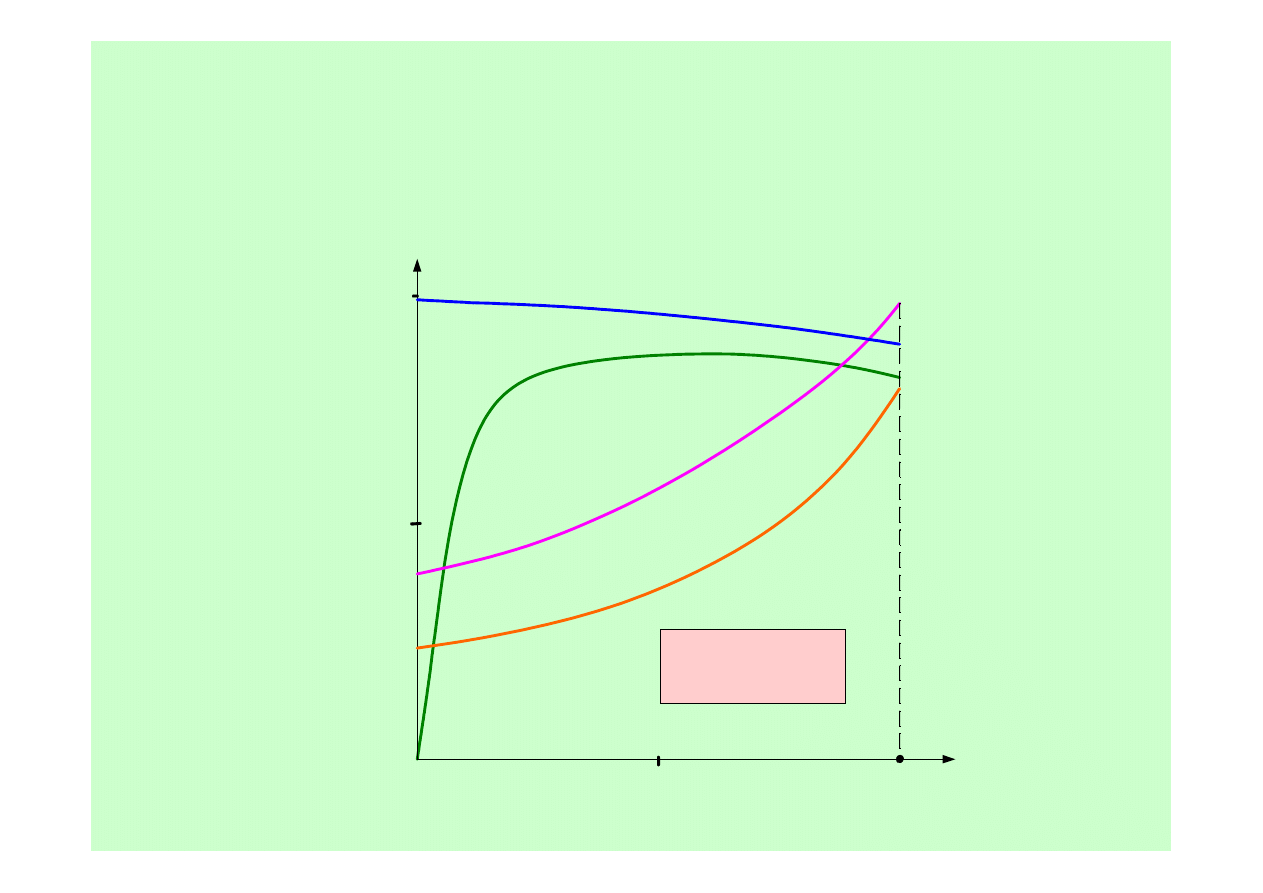
Charakterystyki robocze silnika
indukcyjnego
n/n
s
η
I/I
n
cosf
P
2
/P
n
0
1,0
U = U
n
f = f
n
1,0
0,5
0,5
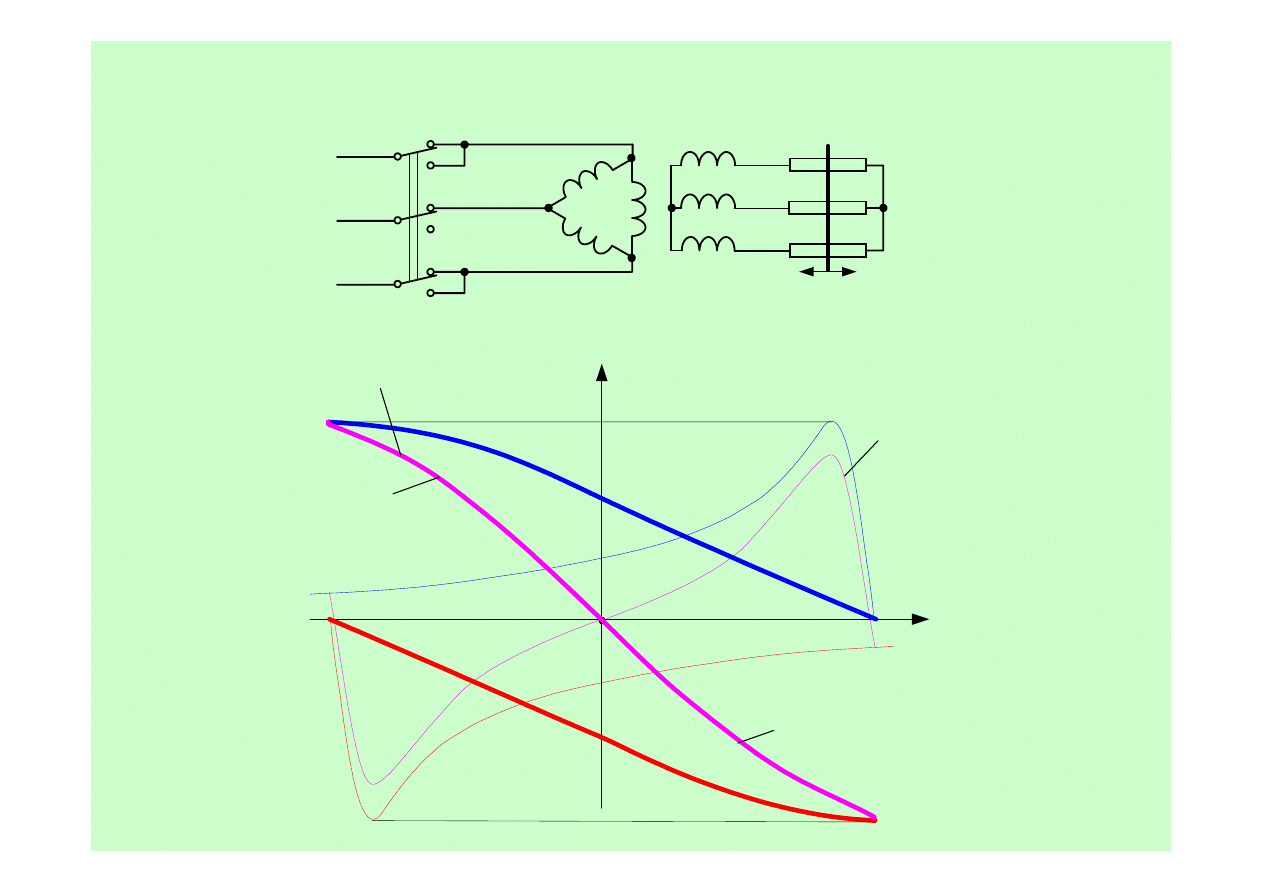
Regulacja prędkości obrotowej
silnika pierścieniowego
Regulator
prędkości
stojan
wirnik
U
3f
n
max
n
min
n
n=0
M
R
r1
R
r2
R
r3
R
r4
R
r5
R
r
=0
n
max
n
min
M
obc
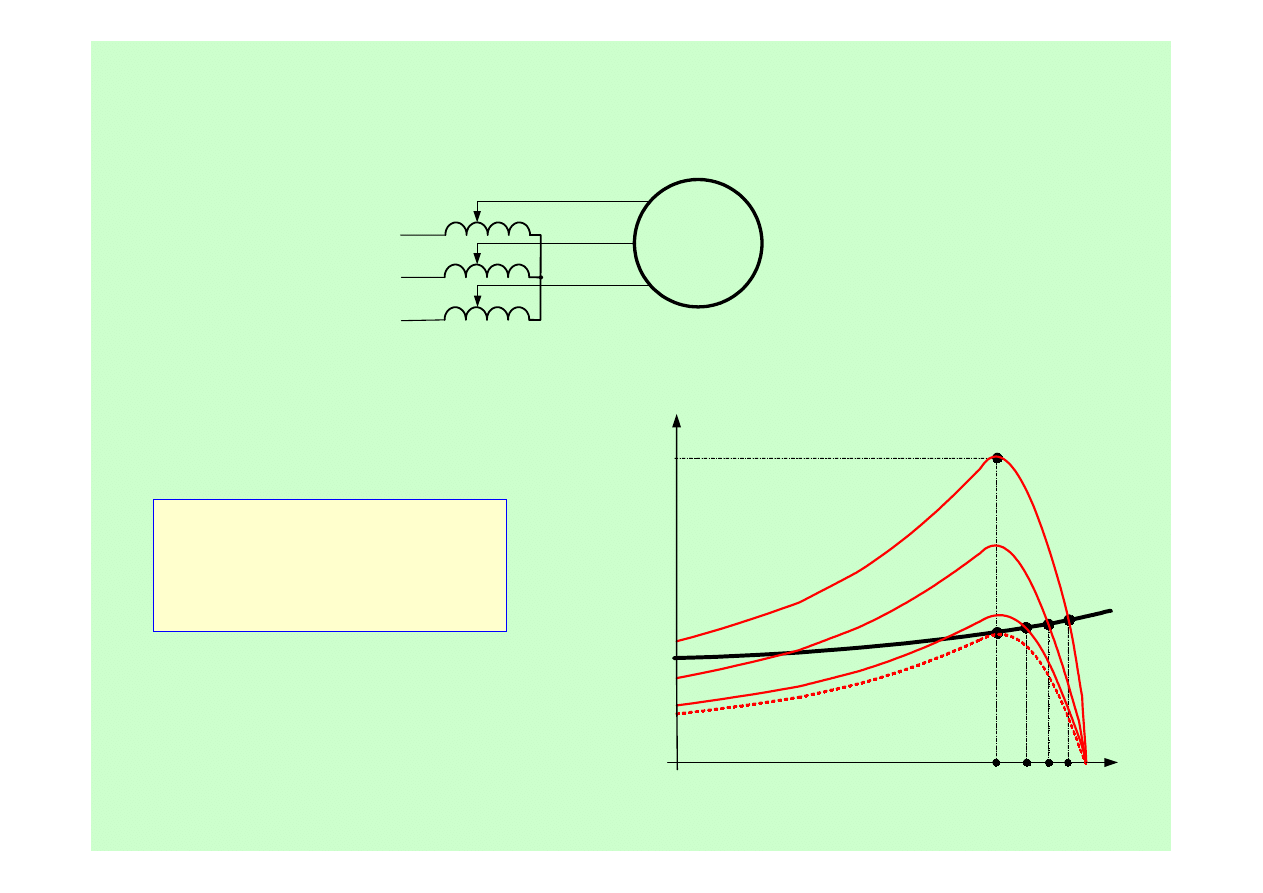
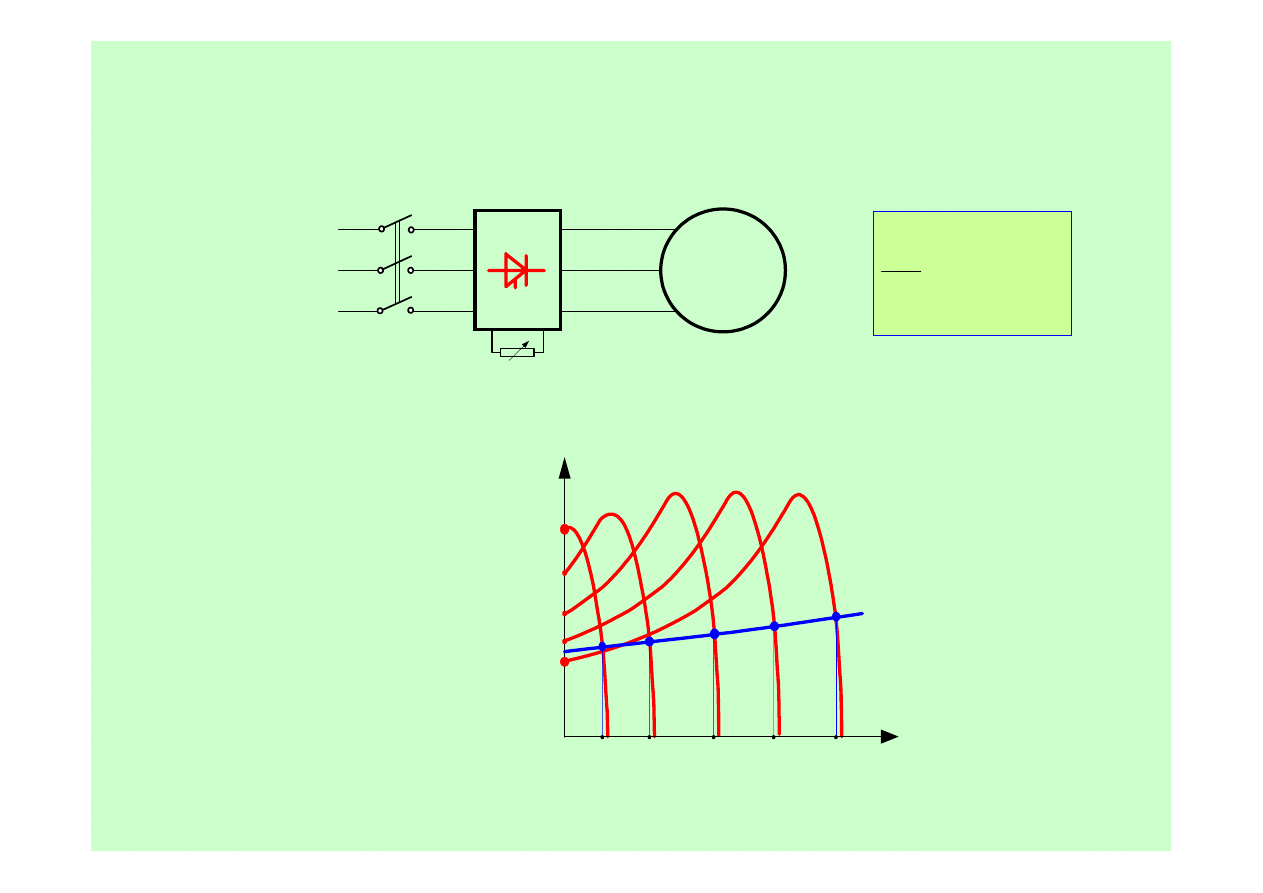
Regulacja prędkości obrotowej
przez zmianę napięcia zasilającego
M
U
3f
M
max
n
n
n
n=0
M
n
k
M
obc
U
n
U
1
U
2
U
3
2
U
M
∝
Regulacja prędkości obrotowej
przez zmianę liczby par biegunów
p =1
p =1
p =2
Regulacja prędkości przez zmianę częstotliwości
M
U
s
, f
s
f
s
U
var
, f
var
const
f
U =
M
r1
n
0
M
f
1
f
4
f
n
f
3
f
2
M
r n
M
obc
n
1
n
1
n
1
n
1
n
n
Silniki jednofazowe
n
0
M
M
1
M
2
M=M
1
+M
2
M
rozr
=0
ω
−ω
Φ=Φ
1
+Φ
2
Φ
1
Φ
2
Hamowanie przeciwwłączeniowe
M
1
2
3
M
h
n
s=1
S=2
n=0
M
-n
1
n
1
M
obc
1
2
3
Hamowanie jednofazowe
stojan
wirnik
R
reg
=0
R
max
n
0
M
M
h
M
h
R
reg
=0
R
max
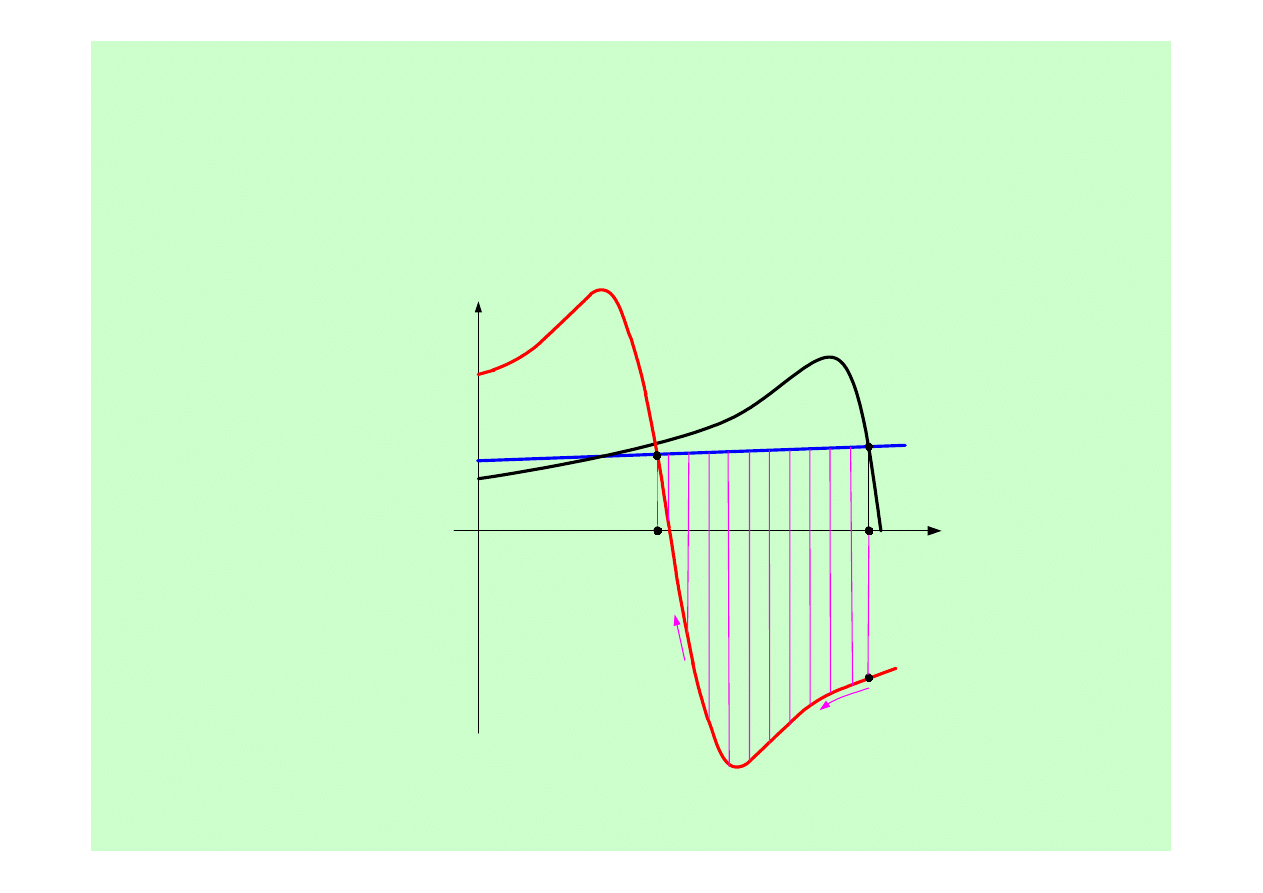
Hamowanie z odzyskiem energii
Zmniejszanie prędkości od n
1
do n
2
w napędzie z silnikiem
dwubiegowym.
M
obc
n
0
M
n
2
p=1
p=2
n
1
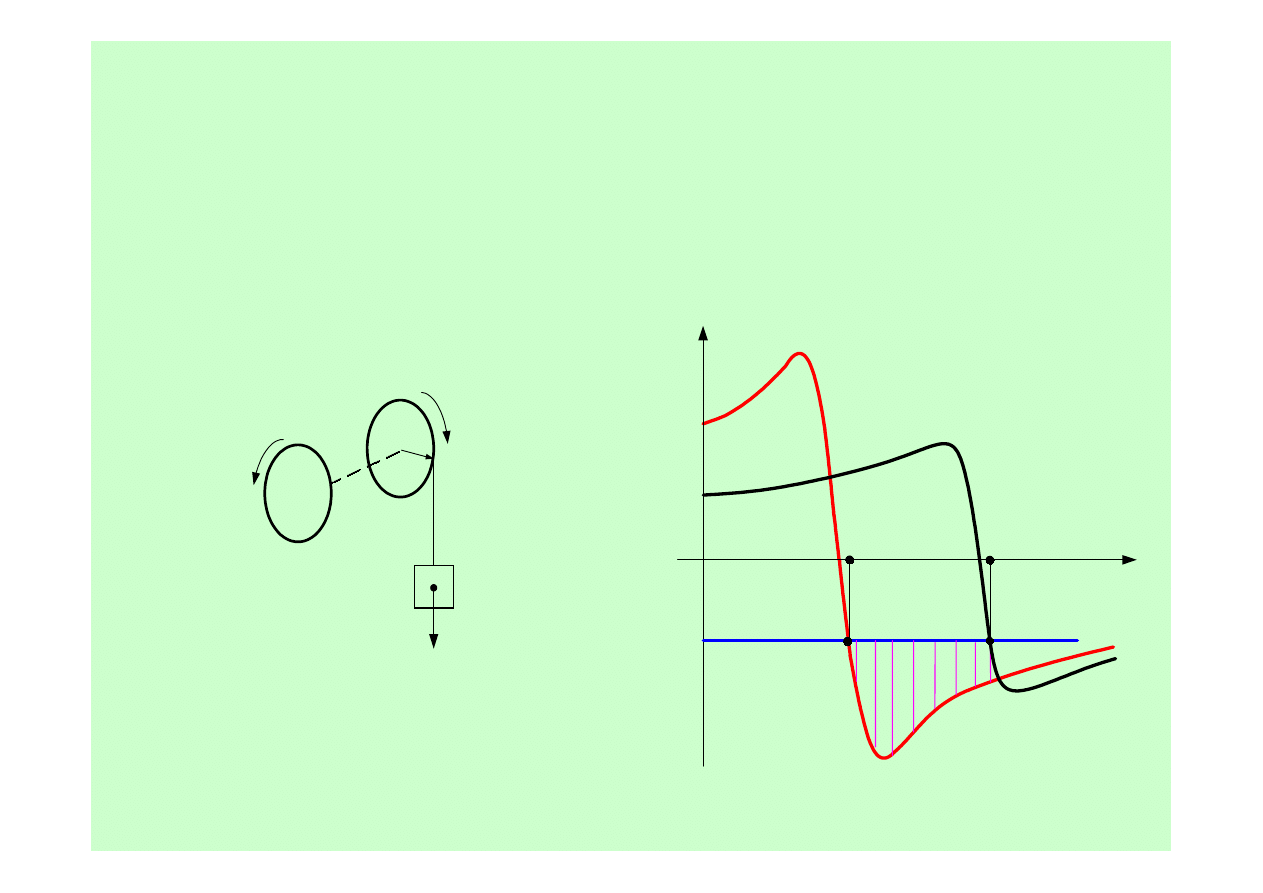
Hamowanie z odzyskiem energii
Opuszczanie ciężaru ze stałą prędkością:
n
h1
- silnik połączony dla p=1
n
h2
- silnik połączony dla p=2
M
G
n
0
M
n
h1
p=1
p=2
n
h2
M
G
n
h
r
M
G
M
h
r
G
M
G
=
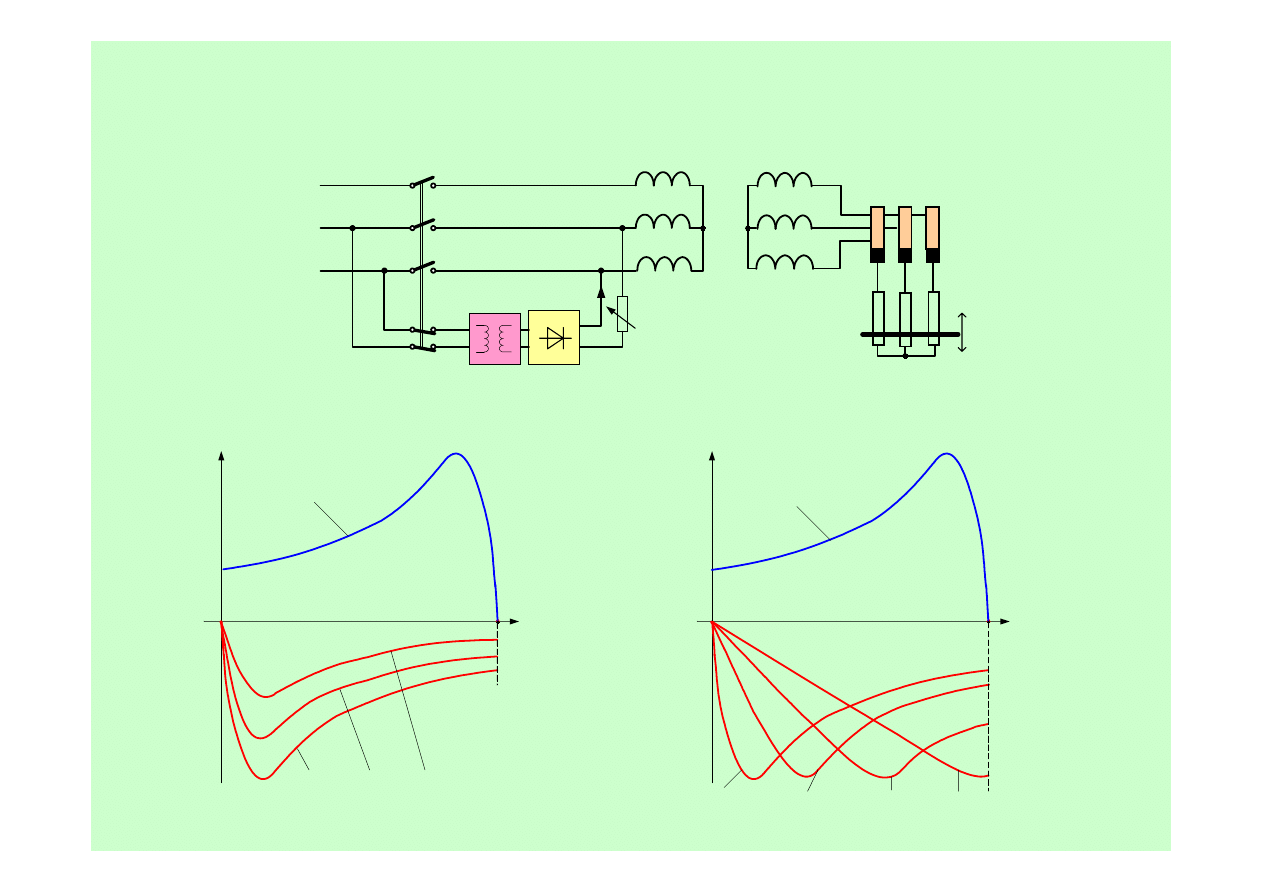
Hamowanie dynamiczne
stojan
wirnik
R
h max
R
h
=0
U
3f
I
s
Tr
M
> R
h1
> R
h2
> R
h3
R
h
=0
n
0
M
ham.
Charakterystyka
naturalna
n
M
I
s1
> I
s2
> I
s3
0
M
ham.
Charakterystyka
naturalna
R
h
=const
I
s
=const
C.D.N.
Document Outline
- Politechnika Wroc³awskaInstytut Maszyn, Napêdów i Pomiarów Elektrycznych
- Silniki indukcyjne
- Budowa silnika indukcyjnego
- Rodzaje budowy wirników silników indukcyjnych
- Obwód magnetyczny silnika indukcyjnego
- Powstawanie strumienia wiruj¹cego
- Zasada dzia³ania silnika indukcyjnego
- Moment obrotowy maszyn indukcyjnych
- Rodzaje pracy maszyny indukcyjnej
- Podstawowe zale¿noœci miêdzy parametrami maszyn indukcyjnych
- Zakres pracy stabilnej
- Rozruch bezpoœredni
- Rozruch z prze³¹cznikiem gwiazda/trójk¹t
- Rozruch silnika pierœcieniowego
- Silniki dwuklatkowe
- Wirniki g³êboko¿³obkowe
- Charakterystyki robocze silnika indukcyjnego
- Regulacja prêdkoœci obrotowej silnika pierœcieniowego
- Regulacja prêdkoœci obrotowej przez zmianê napiêcia zasilaj¹cego
- Regulacja prêdkoœci obrotowej przez zmianê liczby par biegunów
- Regulacja prêdkoœci przez zmianê czêstotliwoœci
- Silniki jednofazowe
- Hamowanie przeciww³¹czeniowe
- Hamowanie jednofazowe
- Hamowanie z odzyskiem energii
- Hamowanie z odzyskiem energii
- Hamowanie dynamiczne
Wyszukiwarka
Podobne podstrony:
indukcyjny pierść, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.5 - Silnik
dudziński,układy napędowe,Hamowanie elektryczne silników indukcyjnych
Silniki - ściąga, Studia, Napędy elektryczne, od marcina, ne, 1Napędy elektryczne, Napędy elektryczn
ELEKTROTECH 5 silniki indukcyjne
DŁAWIK Z LITYM RDZENIEM FERROMAGNETYCZNYM O ROZRUCHU I HAMOWANIA ELEKTRYCZNEGO SILNIKÓW INDUKCYJNYCH
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
Silniki indukcyjne zasilane z sieci jednofazowej, Dla elektryków
badania silnika indukcyjnego trójfazowego, Politechnika Poznańska (PP), Elektronika i elektrotechnik
Badanie silnika indukcyjnego, Politechnika, Sprawozdania, projekty, wyklady, Elektrotechnika
3-fazowe silniki indukcyjne, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, semestr V (m
3-fazowego silnika indukcyjnego pierścieniowego, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elek
Badanie silnika indukcyjnego - l, Polibuda, IV semestr, SEM IV, Maszyny Elektryczne. Laboratorium, 0
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
A3 Silnik indukcyjny pierscieniowy program
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.4 silnik szeregowy
więcej podobnych podstron