Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 1
Liczbę niezależnych współrzędnych (współ-
rzędnych uogólnionych) potrzebnych do określenia
położenia punktu lub bryły w przestrzeni nazywamy
liczbą stopni swobody
Temat: Wybrane zagadnienia kinematyki mechanizmów
Ruch punktu:
•
prostoliniowy,
•
krzywoliniowy (np. po okręgu, elipsie, dowolnej krzywej)
Ruch bryły:
•
postępowy,
•
obrotowy,
•
płaski,
•
kulisty,
•
śrubowy,
•
dowolny.
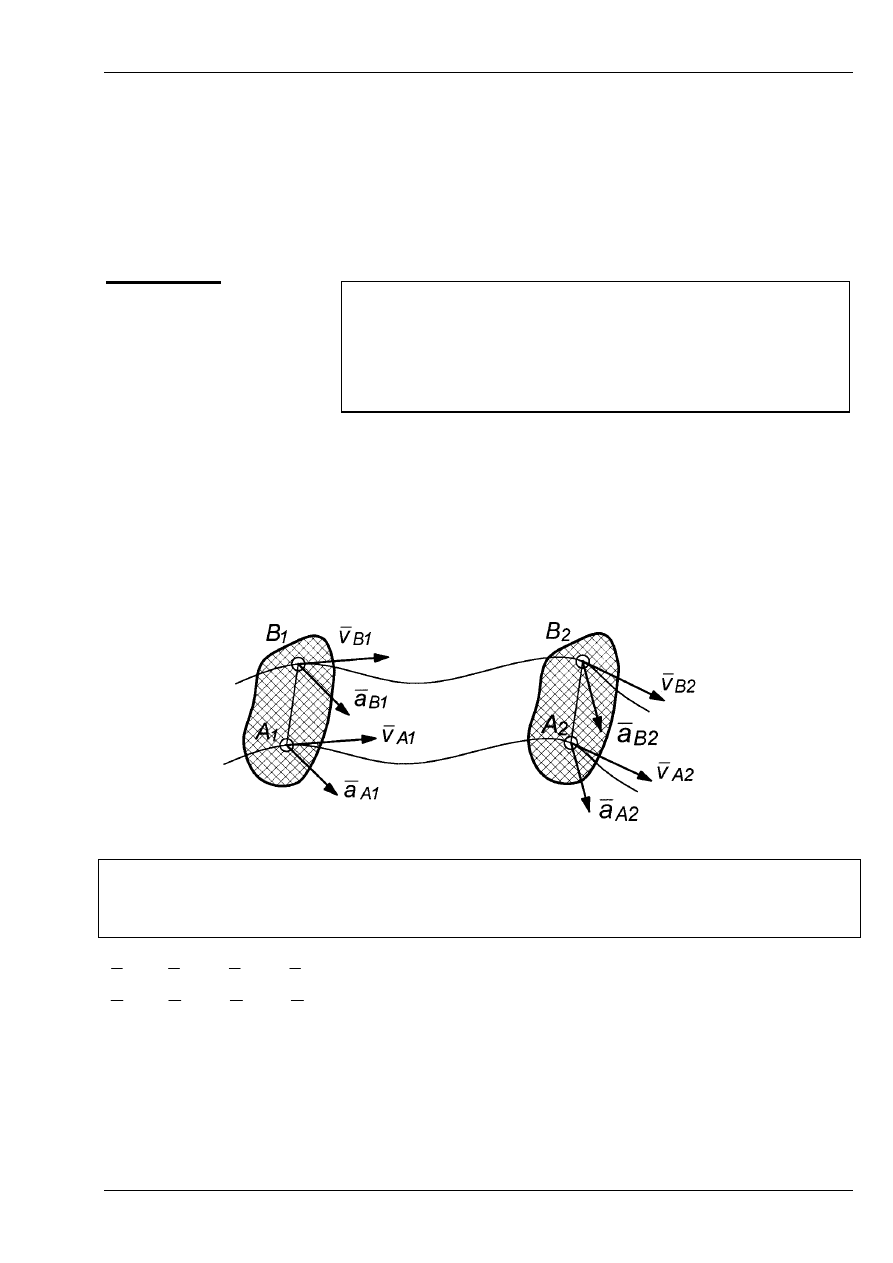
RUCH POSTĘPOWY BRYŁY
Ruch postępowy członu zachodzi wówczas, jeżeli dowolny odcinek AB zwią-
zany sztywno z członem zachowuje położenie równoległe w kolejnych położe-
niach mechanizmu: A
1
B
1
A
2
B
2
Rys. 1
Twierdzenie: Jeżeli bryła porusza się ruchem postępowym to wszystkie punkty
bryły poruszają się po torach przystających i w każdej chwili „t” mają te same
prędkości i przyspieszenia.
a
a
a
a
v
v
v
v
2
B
2
A
1
B
1
A
2
B
2
A
1
B
1
A
=
=
=
=
Równania ruchu postępowego:
)
t
(
z
z
),
t
(
y
y
),
t
(
x
x
=
=
=
x,y,z - współrzędne uogólnione
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 2
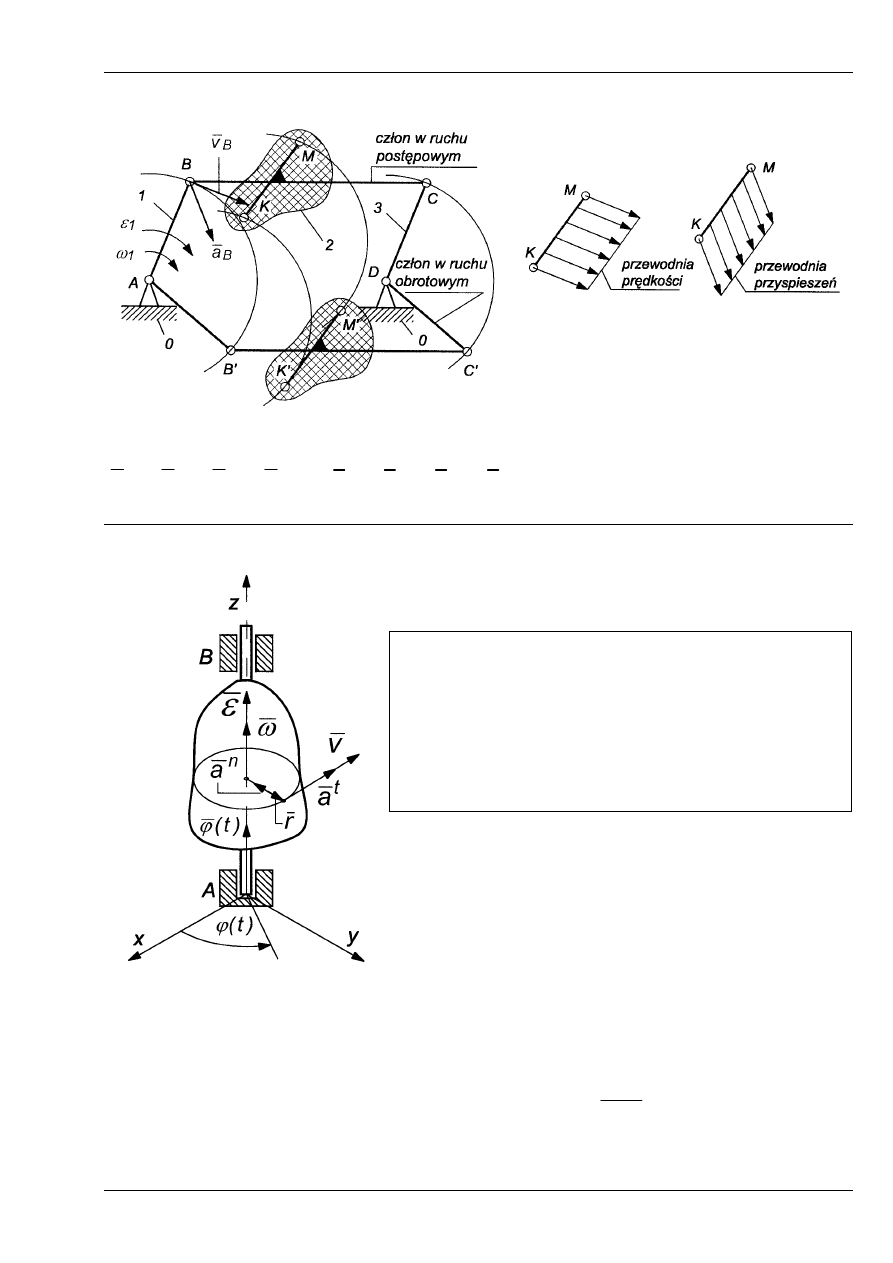
Przykład 1. Równoległobok przegubowy
Rys. 2
Tory punktów B, C, K, M są równoległe a ich prędkości i przyspieszenia równe.
M
K
C
B
a
a
a
a
=
=
=
M
K
C
B
v
v
v
v
=
=
=
0
2
=
ε
0
2
=
ω
RUCH OBROTOWY BRYŁY
Rys. 3
Bryła w ruchu obrotowym ma jeden stopień swobody,
)
t
(
ϕ
ϕ =
,
)
t
(
ϕ
- współrzędna uogólniona
Kąt obrotu bryły:
)
t
(
ϕ
ϕ =
, Prędkość kątowa:
dt
d
ϕ
ω =
Bryła wykonuje ruch obrotowy, jeżeli wszyst-
kie punkty tej bryły poruszają się po torach ko-
łowych leżących w płaszczyznach do siebie
równoległych. Środki geometryczne torów
(okręgów) leżą na jednej prostej, która jest
osią obrotu bryły.
Rozkład prędkości i przyspieszeń punk-
tów członu w ruchu postępowym.
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 3
Przyspieszenie kątowe:
dt
d
dt
d
2
2
ϕ
ω
ε
=
=
Prędkość liniowa dowolnego punktu bryły:
r
v
,
r
v
⋅
=
×
=
ω
ω
Przyspieszenie liniowe styczne dowolnego punktu bryły:
r
a
,
r
a
t
t
⋅
=
×
=
ε
ε
Przyspieszenie liniowe normalne dowolnego punktu bryły:
r
a
,
r
v
a
2
n
n
⋅
=
×
×
=
×
=
ω
ω
ω
ω
Przykład 2. Człon mechanizmu płaskiego w ruchu obrotowym
Rys. 4
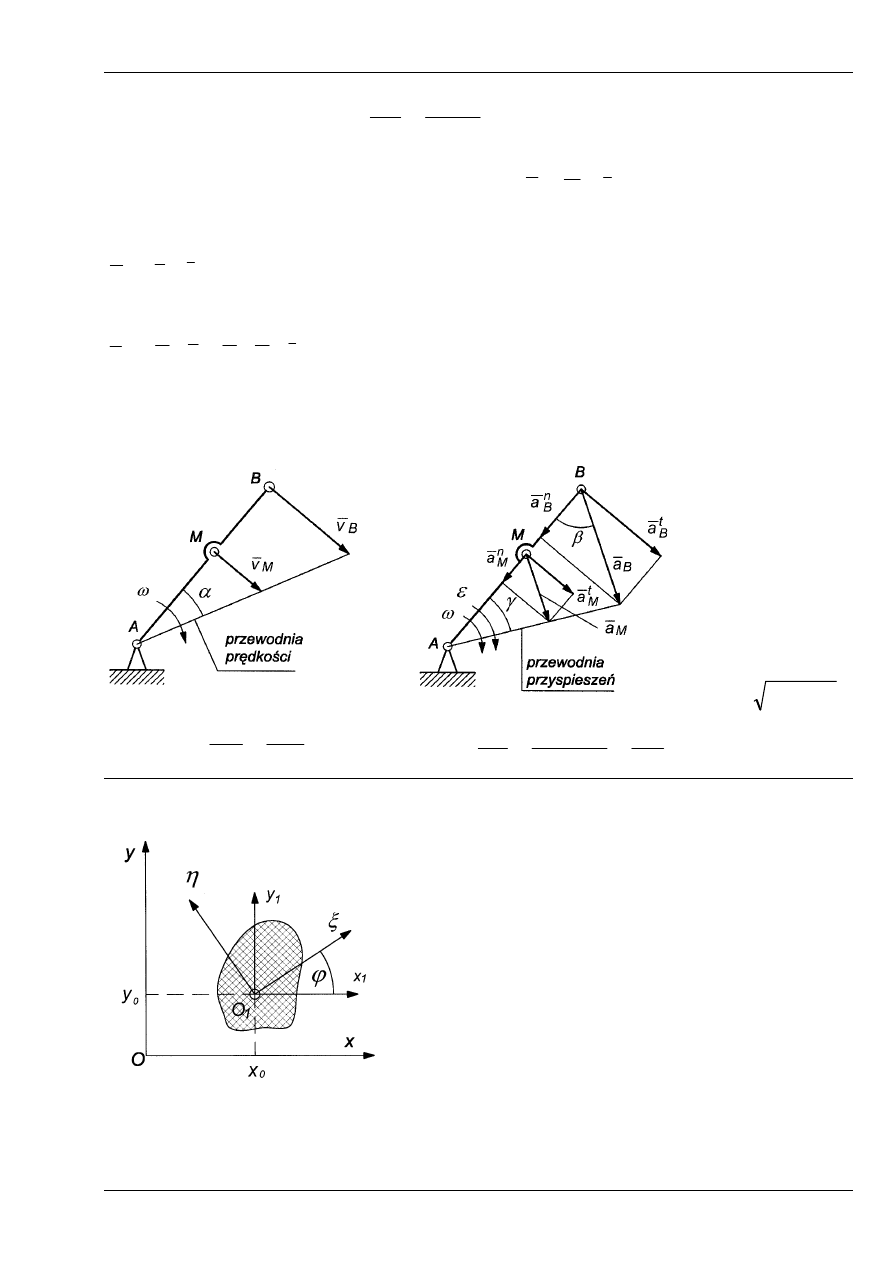
RUCH PŁASKI BRYŁY
Rys. 5
Równania ruchu płaskiego:
)
t
(
),
t
(
y
y
),
t
(
x
x
0
0
0
0
ϕ
ϕ =
=
=
.
Bryła wykonuje ruch płaski, jeżeli
wszystkie punkty bryły poruszają się w
płaszczyznach równoległych do pewnej
płaszczyzny nieruchomej.
AB
a
,
AB
a
t
B
2
n
B
⋅
=
⋅
=
ε
ω
AB
v
B
⋅
=
ω
2
4
B
AB
a
ε
ω
+
=
2
2
n
B
t
B
AB
AB
a
a
tg
ω
ε
ω
ε
β
=
⋅
⋅
=
=
AM
v
AB
v
tg
M
B
=
=
=
ω
α
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 4
Twierdzenie: Jeżeli figura płaska porusza się w swej płaszczyźnie to z każde-
go położenia daje się przesunąć w inne położenie poprzez obrót dookoła punk-
tu leżącego w płaszczyźnie, zwanego chwilowym środkiem obrotu.
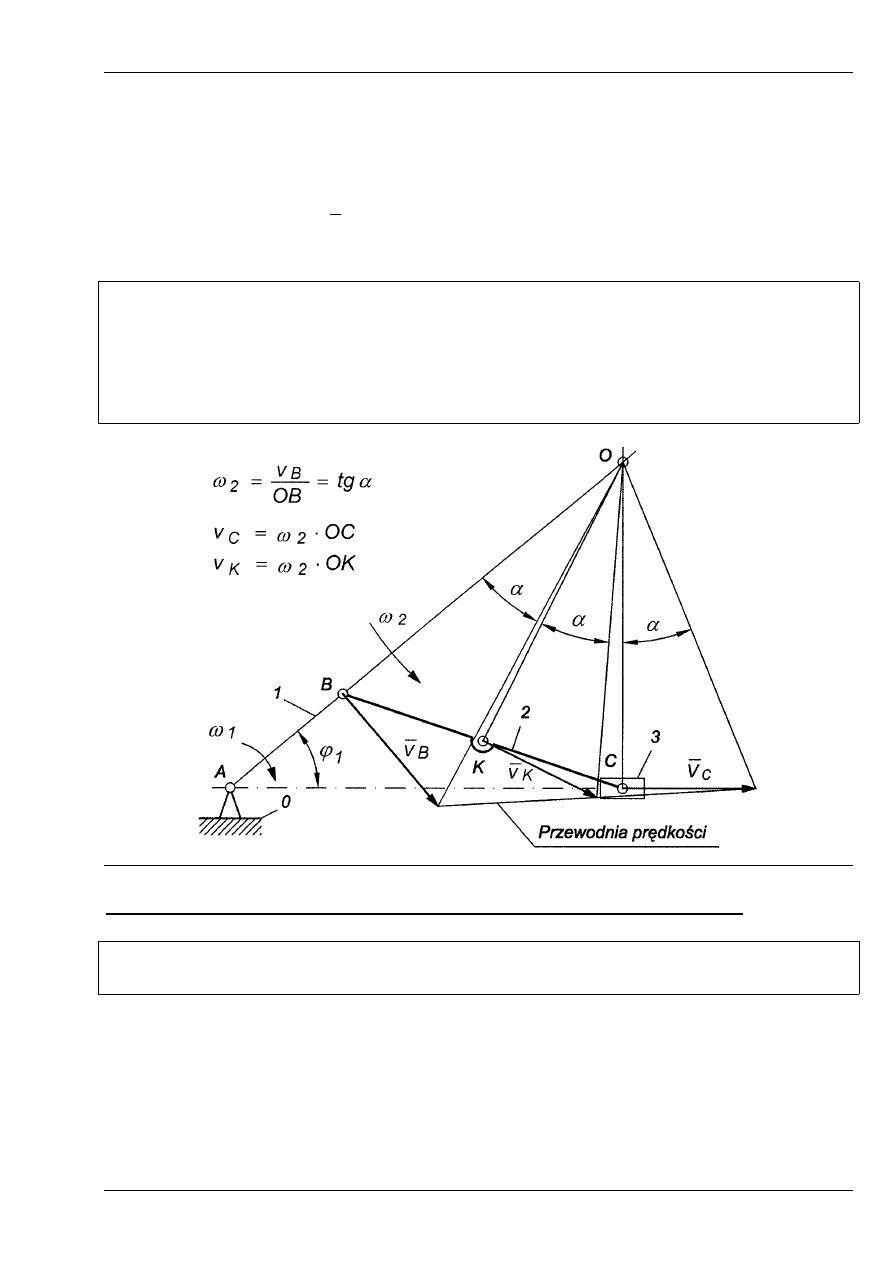
Przykład 3.
Dane: prędkość punktu B -
B
v
, oraz kierunek prędkości punktu C.
Należy wyznaczyć wartość prędkości punktu C należącego członu 2, który wykonuje ruch
płaski.
W celu wyznaczenia chwilowego środka obrotu członu 2 rysujemy prostą prostopadłą
do wektora prędkości punktu B w jego początku oraz analogicznie rysujemy prostą
prostopadłą do wektora prędkości punktu C. Na przecięciu obydwu prostych znajdu-
jemy punkt O stanowiący chwilowy środek obrotu członu 2. Następnie obliczamy
prędkość kątową
2
ω
. Znając prędkość kątową
2
ω
obliczamy prędkość dowolnego
punktu tego członu, np. punktu C i K.
AB
v
1
B
ω
=
Rys. 6
Wyznaczanie prędkości i przyspieszeń metodą grafoanalityczną nazywanej
również metodą planów prędkości i przyspieszeń lub metodą superpozycji
Prędkości i przyspieszenia punktów członów mechanizmów są wy-
znaczane na podstawie składania ruchu unoszenia i ruchu względnego
Metoda planów prędkości i przyspieszeń jest metodą grafoanalityczną, co
oznacza, że niektóre wielkości (prędkości i przyspieszenia liniowe i oraz pręd-
kości i przyspieszenia kątowe) obliczamy z równań algebraicznych a pozostałe
prędkości i przyspieszenia liniowe wyznaczamy z równań wektorowych.
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 5
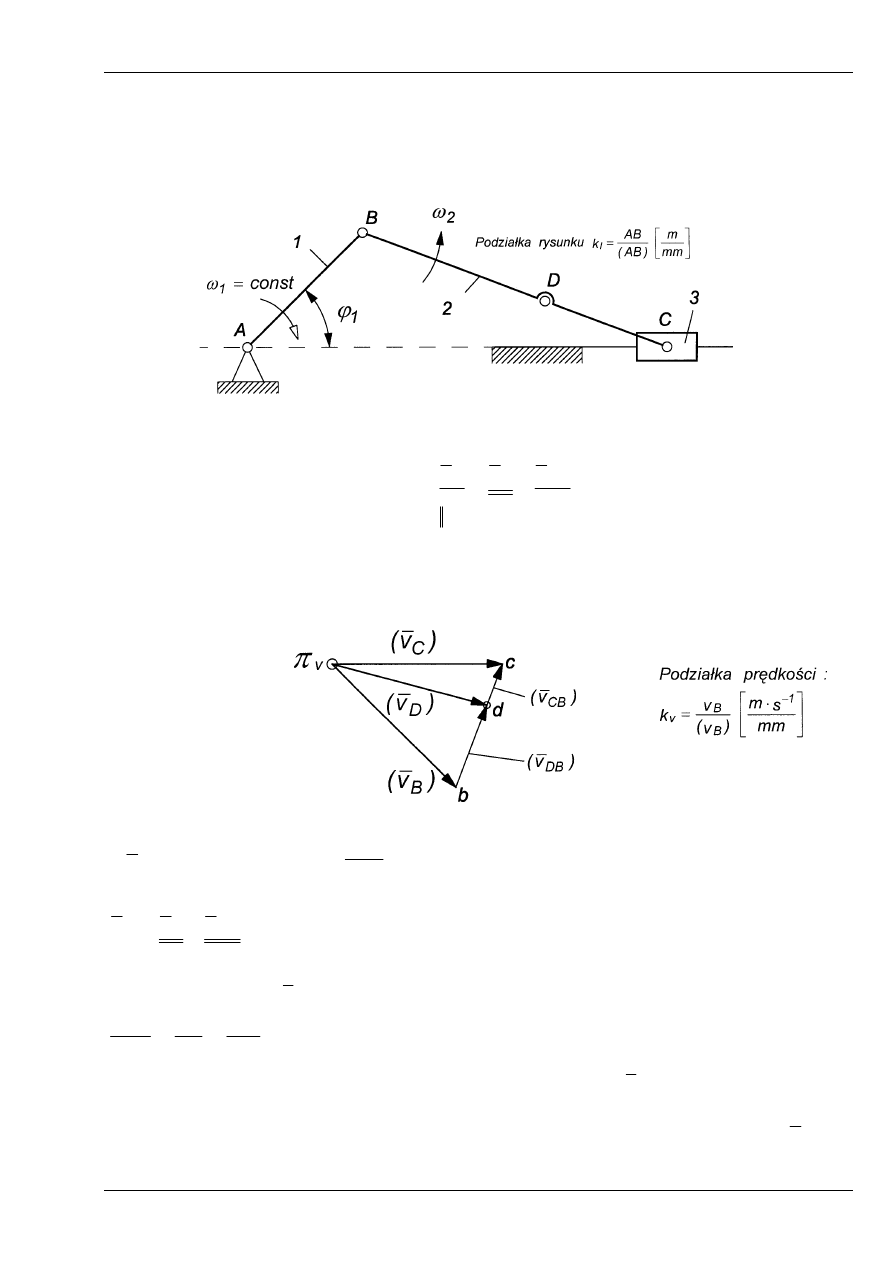
Przykład 4
Wyznaczyć prędkość i przyspieszenie punktów B, C, D mechanizmu korbowo-suwakowego
grafoanalityczną metodą planów.
Dane:
const
1
=
ω
, wymiary mechanizmu AB, BC, BD.
Zadanie rozwiązać dla zadanego położenia kątowego członu napędzającego
ϕ
1.
Rys. 7
Równania planu prędkości
Obliczamy:
AB
v
1
B
⋅
= ω
,
następnie piszemy równanie wektorowe:
BC
AB
AC
CB
B
C
v
v
v
⊥
⊥
+
=
(P4.1)
Przyjmujemy punkt biegunowy
π
v
i rozwiązujemy wykreślnie w podziałce równanie (1), ry-
sując tzw. plan prędkości, (rys. 8). Z planu prędkości otrzymamy wartość prędkości:
v
,
v
B
C
C
Rys. 8
Prędkość kątową dźwigni 2 obliczymy po odczytaniu z planu prędkości wartości wekto-
ra
v
CB
(odcinek bc
) :
CB
v
CB
2
=
ω
;
W celu wyznaczenia prędkości punktu D napiszemy równania:
DB
v
v
v
v
2
DB
DB
B
D
⋅
=
+
=
ω
(P4.2)
Prędkość względną - v
DB
można również wyznaczyć korzystając z proporcji:
DB
CB
db
cb
v
v
DB
CB
=
=
następnie należy zaznaczyć na planie punkt „d” (koniec wektora v
DB
).
Po połączeniu bieguna
π
v
z punktem ”d” z otrzymamy wektor prędkości punktu D tj.
v
D
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 6
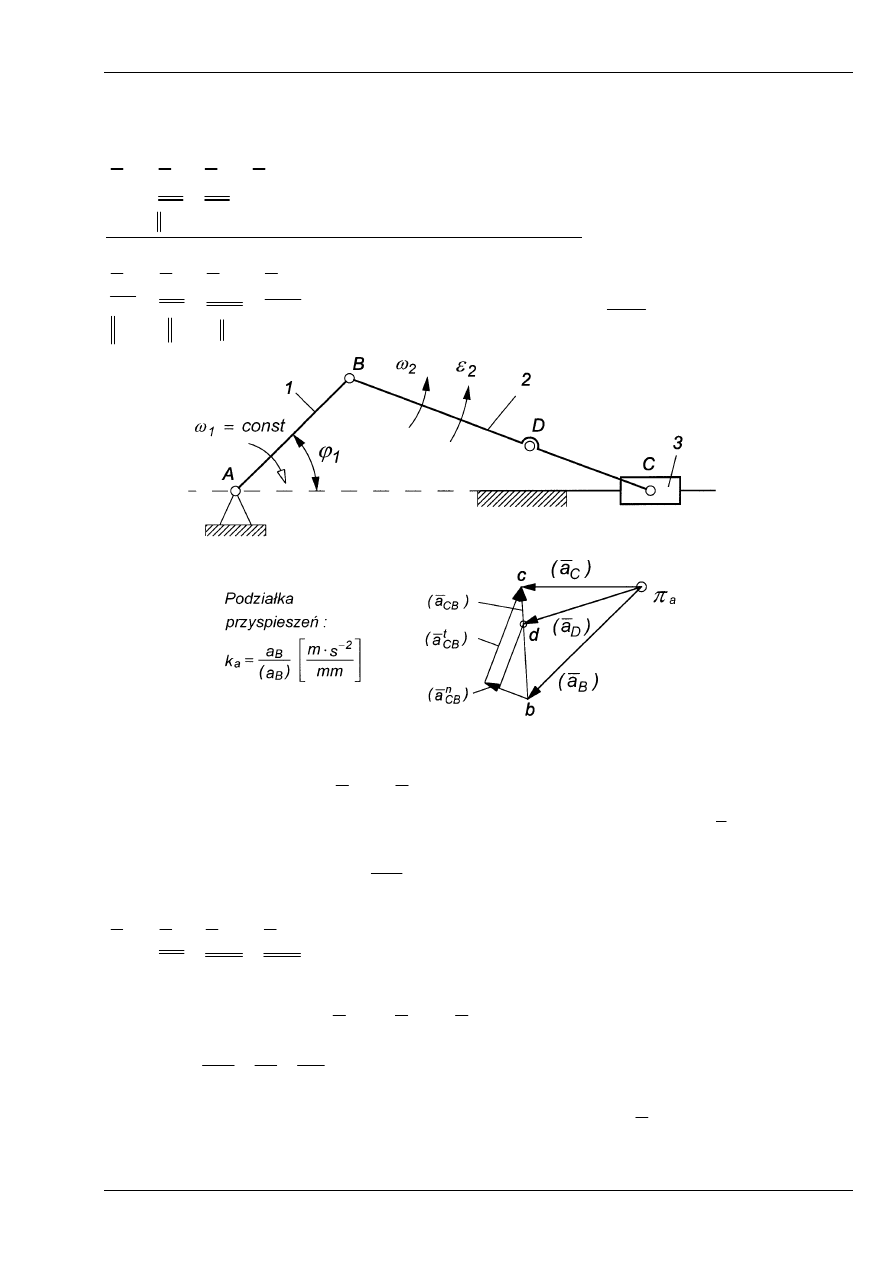
Równania planu przyspieszeń:
Równania przyspieszeń piszemy podobnie jak równania prędkości.
AB
1
t
B
n
B
t
B
n
B
B
0
ponieważ
0
a
a
a
a
a
=
=
=
+
=
ε
CB
CB
AB
AC
t
CB
n
CB
B
C
a
a
a
a
⊥
+
+
=
(P4.3)
gdzie:
CB
CB
v
a
2
2
2
CB
n
CB
⋅
=
=
ω
Rys. 9
Rozwiązujemy wykreślnie w podziałce równanie (3), rysując tzw. plan przyspieszeń
z dowolnie przyjętego bieguna
π
a
(rys. 9),
Otrzymamy przyspieszenia:
a
i
a
t
CB
C
Przyspieszenie kątowe dźwigni 2 obliczymy po odczytaniu wartości wektora a
t
CB
z planu
przyspieszeń (odcinek bc):
CB
a
t
CB
2
=
ε
.
Następnie znajdziemy przyspieszenie punktu D na podstawie równań:
DB
a
oraz
,
DB
a
:
gdzie
a
a
a
a
2
2
n
DB
2
t
DB
t
DB
n
DB
B
D
⋅
=
⋅
=
+
+
=
ω
ε
(P4.4)
Przyspieszenie względne -
a
a
a
t
DB
n
DB
DB
+
=
, można też wyznaczyć korzystając
z proporcji:
DB
CB
db
cb
a
a
DB
CB
=
=
.
Wyznaczając w ten sposób położenie punktu „d” na planie przyspieszeń i łącząc następnie
biegun
π
a
z tym punktem znajdziemy wykreślnie przyspieszenie
a
D .
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 7
Analiza kinematyczna mechanizmów dźwigniowych metodą wieloboku
wektorowego
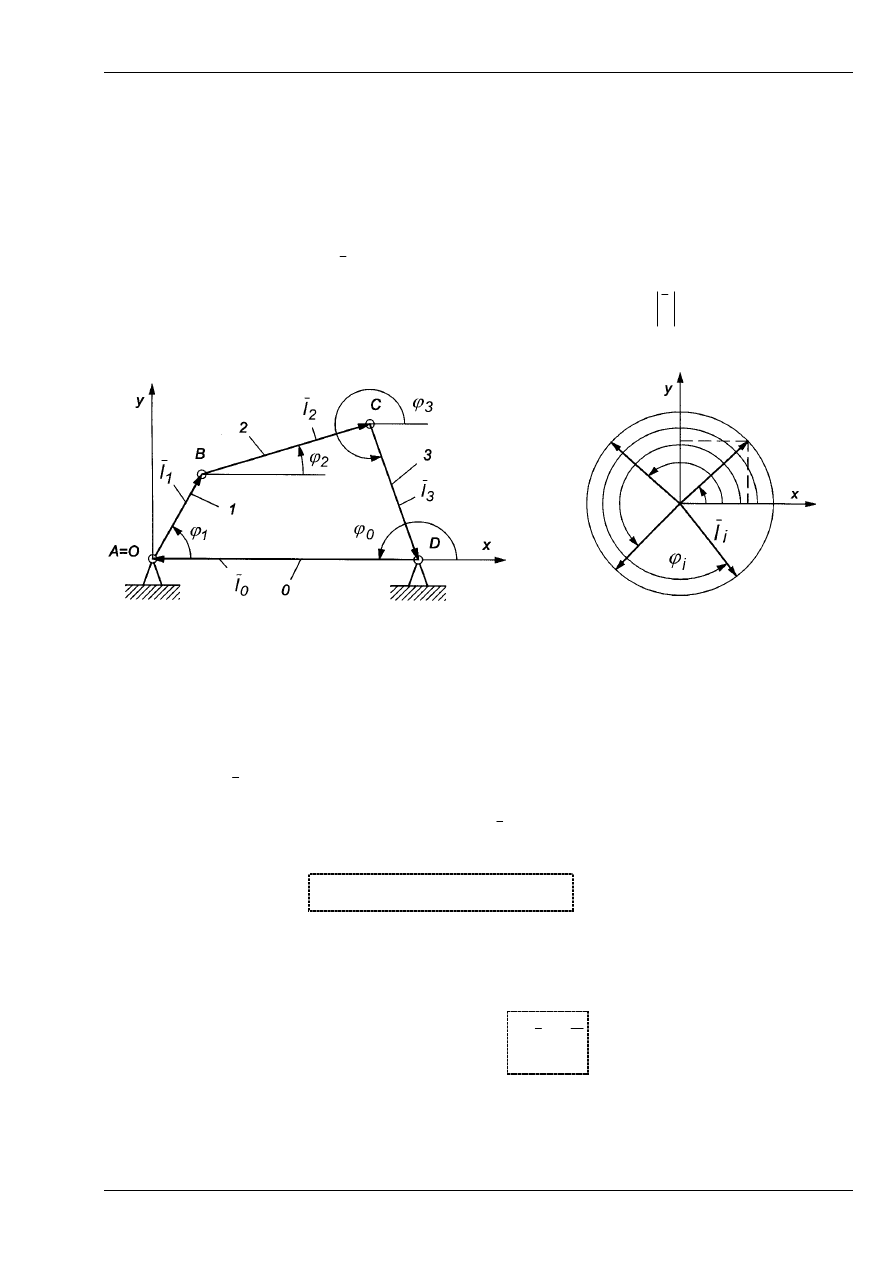
W opisywanej metodzie łańcuch kinematyczny dowolnego płaskiego me-
chanizmu dźwigniowego przedstawia się w postaci zamkniętego wieloboku
wektorowego (Rys. 10), który określa chwilowe położenie członów.
Każdy z wektorów
i
I
tego wieloboku zdefiniowany jest we współrzędnych
biegunowych przez dwa parametry: długość wektora
i
i
I
I
=
oraz kąt
i
ϕ
określający jego kierunek.
Rys. 10. Mechanizm dźwigniowy Rys. 11. Określanie kątów w metodzie
jako wielobok wektorowy wieloboku wektorowego
Dodatni kąt
i
ϕ
jest to taki kąt o jaki należy obrócić oś x układu współrzęd-
nych Oxy w kierunku przeciwnym do ruchu wskazówek zegara w prawoskręt-
nym układzie współrzędnych aby jej dodatni zwrot pokrył się z dodatnim zwro-
tem wektora
i
I co przedstawiono na Rys. 11.
Przy takiej umowie współrzędne wektora
)
I
,
I
(
I
iy
ix
i
wynoszą zawsze:
i
i
iy
i
i
ix
sin
I
I
,
cos
I
I
ϕ
ϕ
=
=
(1)
a znaki współrzędnych są określone poprzez znaki funkcji
ϕ
i
sin
i
ϕ
i
cos
.
Mechanizm płaski zdefiniowany jest przez zamknięty wielobok składający się
z n wektorów, co zapisujemy następująco:
0
I
n
1
i
i
=
∑
=
(2)
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 8
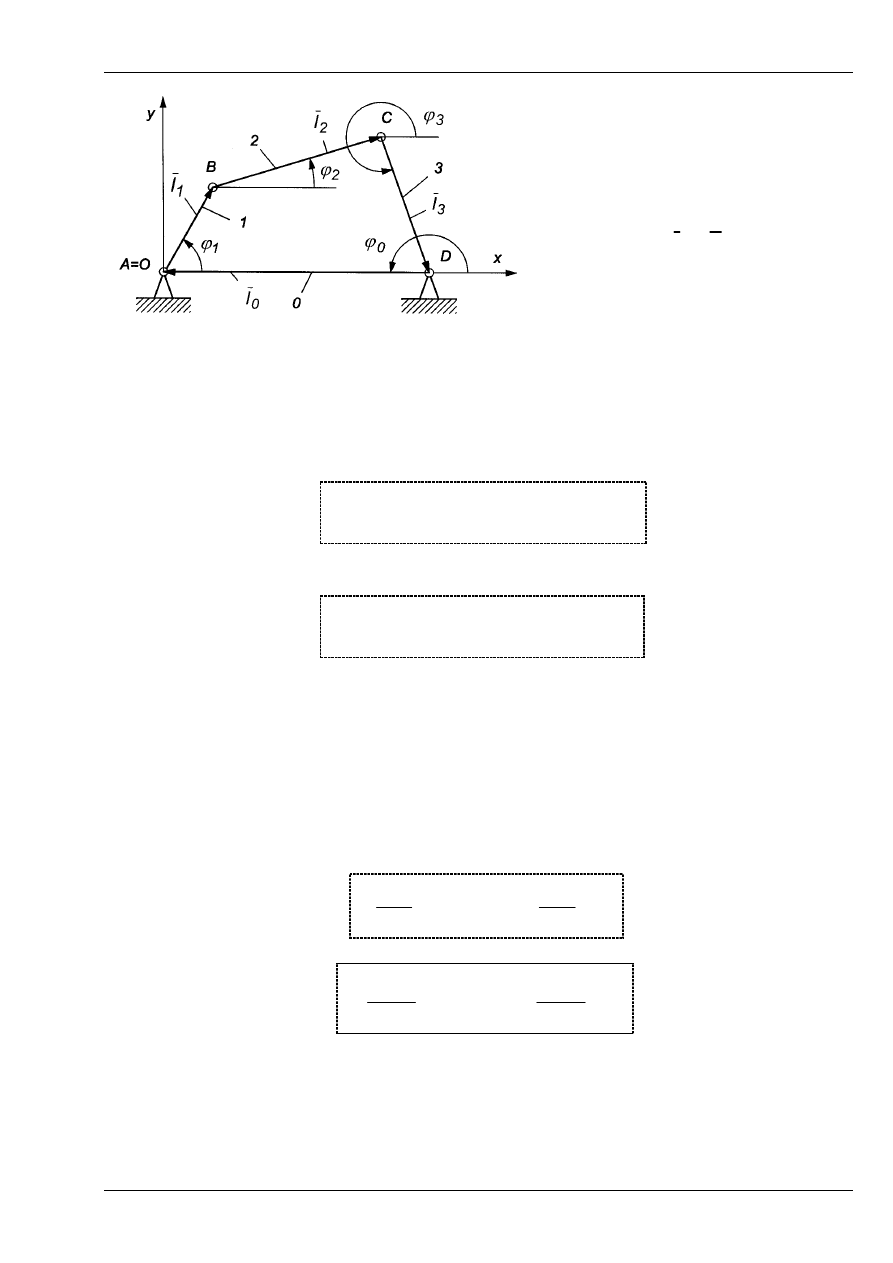
Wielobok wektorowy zbudowany na
członach mechanizmu posiada
2
⋅⋅⋅⋅
n
parametrów.
(2)
Rys. 10 powtórzony. Mechanizm dźwigniowy jako wielobok wektorowy
Wielobok wektorowy opisany równaniem (2) po zrzutowaniu go na osie pła-
skiego układu współrzędnych odpowiada dwóm równaniom skalarnym:
0
cos
l
,
0
l
i
n
1
i
i
n
1
i
ix
=
∑
⇒
=
∑
=
=
ϕ
(3)
0
sin
l
,
0
l
i
n
1
i
i
n
1
i
iy
=
∑
⇒
=
∑
=
=
ϕ
(4)
Ponieważ układ równań (3), (4) musi być oznaczony, na jego podstawie
można wyznaczyć dwa szukane parametry geometryczne np. dwie długo-
ści, długość i kąt lub dwa kąty. Pozostałe 2n - 2 parametry muszą być zatem
znane i należy je przyjąć jako dane w momencie definiowania mechanizmu.
Po zróżniczkowaniu równań (3), (4) względem czasu otrzymujemy układy
równań:
0
dt
dl
,
0
dt
dl
n
1
i
iy
n
1
i
ix
=
∑
=
∑
=
=
(5)
oraz
0
dt
l
d
,
0
dt
l
d
n
1
i
2
iy
2
n
1
i
2
ix
2
=
∑
=
∑
=
=
(6)
Z układu równań (5) wyznacza się dwie szukane prędkości liniowe lub kątowe
a na podstawie (6) dwa szukane przyspieszenia liniowe lub kątowe.
0
I
n
1
i
i
=
∑
=
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 9
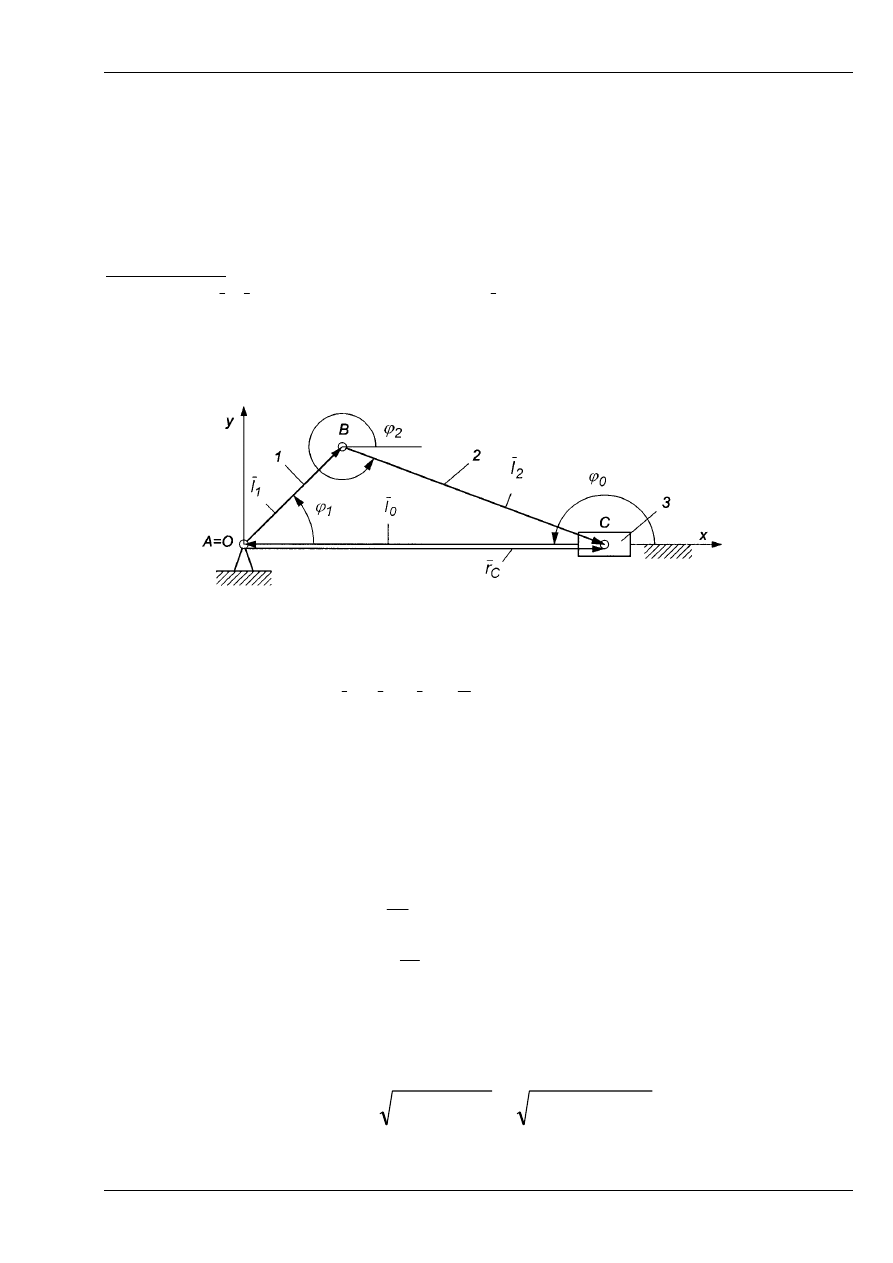
Przykład 5. Mechanizm korbowo-suwakowy
Mechanizm można zapisać trzema wektorami w sposób pokazany na Rys. 3. Należy zatem
przyjąć 2
⋅
3 – 2 = 4 parametry.
Dane:
π
ϕ
ϕ
ϕ
=
=
0
1
1
),
t
(
,
2
1
l
BC
,
l
AB
=
=
Szukane:
)
t
(
),
t
(
x
x
2
2
C
C
ϕ
ϕ =
=
,
)
t
(
),
t
(
v
v
2
2
C
C
ω
ω =
=
,
)
t
(
),
t
(
a
a
2
2
C
C
ε
ε =
=
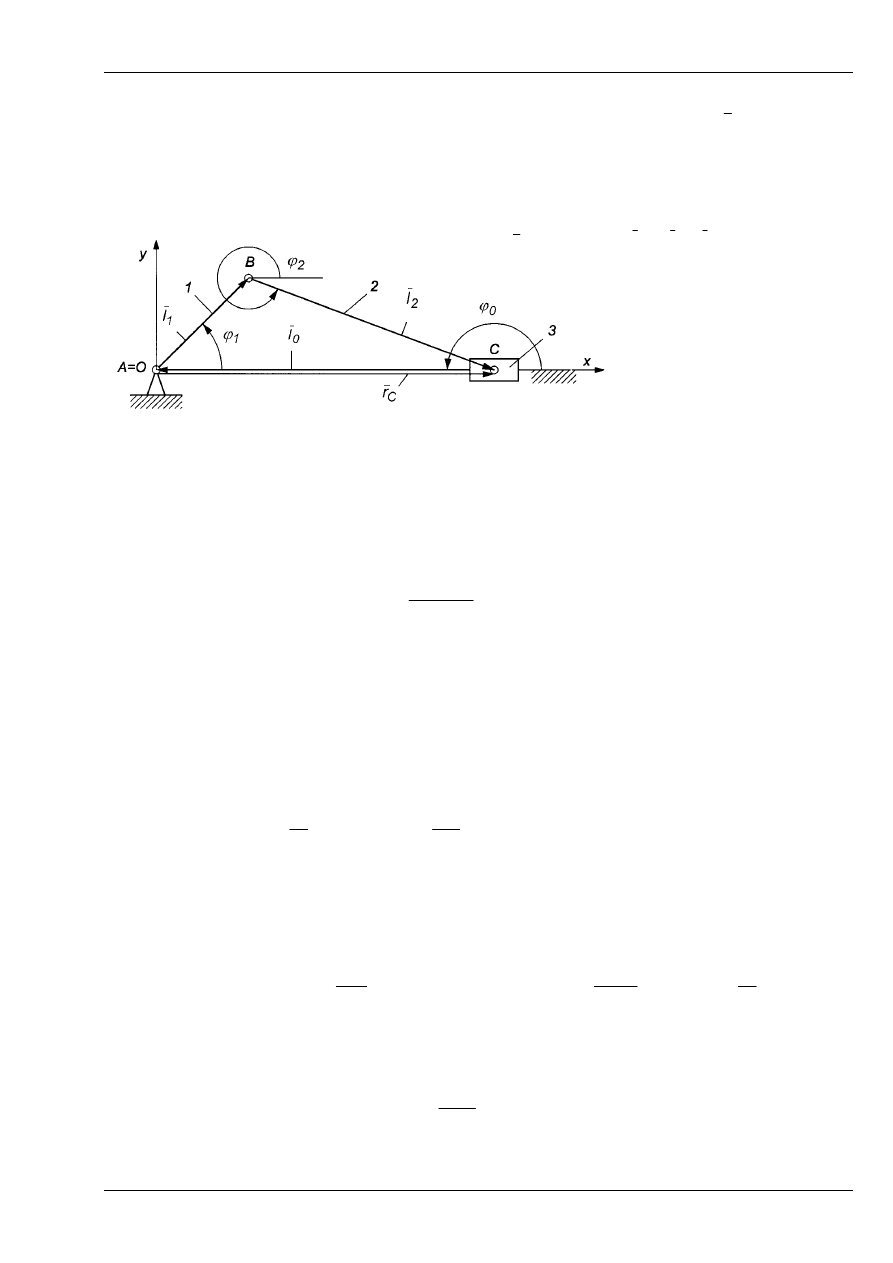
Rozwiązanie
Dwa wektory
2
1
l
,
l
mają stałą długość. Wektor
0
l
zmienia swoją długość w czasie ruchu
mechanizmu. Wpisujemy wielobok wektorowy w kontur mechanizmu i oznaczamy położenia
kątowe poszczególnych wektorów względem osi Ox za pomocą kątów skierowanych.
Rys. 12
Opisujemy wielobok wektorowy równaniem wektorowym:
0
l
l
l
0
2
1
=
+
+
(P5.1)
Następnie piszemy odpowiednie równania skalarne:
0
l
cos
l
cos
l
0
2
2
1
1
=
−
+
ϕ
ϕ
(P5.2)
0
sin
l
sin
l
2
2
1
1
=
+
ϕ
ϕ
(P5.3)
Przyjmując oznaczenie mamy z (P5.3) mamy:
ϕ
λ
ϕ
ϕ
1
1
2
1
2
sin
sin
l
l
sin
−
=
−
=
P5.4)
i stąd
)
sin
sin(
arc
1
2
ϕ
λ
ϕ
−
=
(P5.5)
Dalej oznaczymy:
1
2
2
2
2
2
sin
1
sin
1
cos
A
ϕ
λ
ϕ
ϕ
−
=
−
=
=
(P5.6)
2
1
l
l
=
λ
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 10
W celu wyznaczenia prędkości liniowej oraz przyspieszenia liniowego punktu C ko-
nieczne jest wprowadzenie wektora promienia wodzącego tego punktu
C
r
.
Wektor promień wodzący dowolnego mechanizmu płaskiego lub przestrzen-
nego prowadzony jest zawsze od początku układu współrzędnych do danego
punktu, którego prędkość lub przyspieszenie chcemy obliczyć.
2
1
0
C
C
l
l
l
)
0
,
x
(
r
+
=
−
=
(P5.7)
Rys. 12 powtórzony
Współrzędna wektora promienia wodzącego określająca położenie
suwaka wynosi:
A
l
cos
l
cos
l
cos
l
l
l
x
2
1
1
2
2
1
1
x
2
x
1
C
⋅
+
=
+
=
+
=
ϕ
ϕ
ϕ
P5.8)
W celu obliczenia prędkości kątowej różniczkujemy (P5.5) względem czasu:
1
1
1
2
1
1
2
2
1
1
2
2
cos
A
cos
cos
cos
cos
ϕ
ϕ
λ
ϕ
ϕ
ϕ
λ
ϕ
ω
ϕ
ϕ
λ
ϕ
ϕ
−
−
=
−
=
=
−
=
&
&
&
&
&
(
P5.9)
Następnie różniczkując (P1.8) względem czasu obliczymy prędkość liniową punktu C:
)
2
sin
A
5
,
0
(sin
l
x
v
1
1
1
1
1
C
C
ϕ
λ
ϕ
ϕ
−
+
−
=
=
&
&
(P5.10)
W celu obliczenia przyspieszenia kątowego różniczkujemy (P5.9) względem czasu:
−
−
=
=
1
1
1
1
2
1
2
1
2
2
cos
2
sin
cos
A
sin
A
ϕ
ϕ
ϕ
ϕ
λ
ϕ
ϕ
λ
ϕ
ε
&&
&
&&
(P5.11)
Następnie różniczkujemy (P5.10) i otrzymamy przyspieszenie liniowe punktu C: (P5.12)
+
+
−
+
−
=
=
1
1
2
3
3
1
2
1
1
1
1
1
1
C
C
2
cos
A
2
sin
A
4
cos
l
2
sin
A
2
sin
l
x
a
ϕ
λ
ϕ
λ
ϕ
ϕ
ϕ
λ
ϕ
ϕ
&
&&
&&
Jeżeli korba
1
I
AB
=
obraca się ze stałą prędkością kątową, wtedy jej przyspieszenie
kątowe jest równe zero czyli
0
dt
d
1
1
1
=
=
=
ω
ε
ϕ
&&
, co należy uwzględnić w równaniach.
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 11
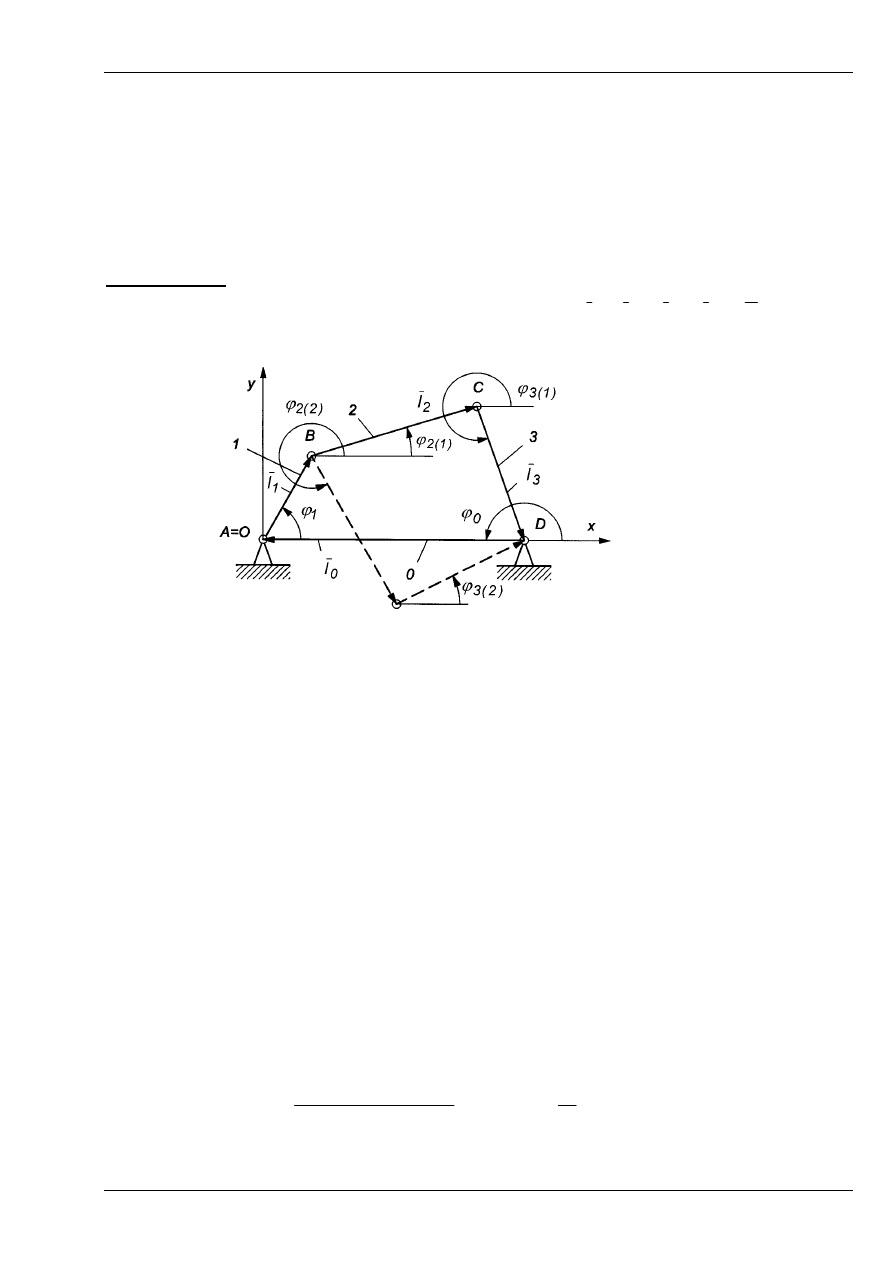
Przykład 6. Mechanizm czworoboku przegubowego
W ten mechanizm wpisujemy cztery wektory (Rys. 13). Należy zatem przyjąć 2
⋅
4 – 2 = 6
parametrów. Wszystkie wektory w przypadku tego mechanizmu mają stałą długość.
Dane:
π
ϕ
ϕ
=
0
0
3
2
1
1
,
l
,
l
,
l
,
l
,
Szukane:
3
2
3
2
3
2
,
,
,
,
,
ε
ε
ω
ω
ϕ
ϕ
.
Rozwiązanie
Mechanizm zapisujemy wielobokiem wektorowym:
0
l
l
l
l
0
3
2
1
=
+
+
+
(P6.1)
Rys. 13
Po rzutowaniu równania (P2.1) na osie układu współrzędnych otrzymamy:
0
sin
l
sin
l
sin
l
0
l
cos
l
cos
l
cos
l
3
3
2
2
1
1
0
3
3
2
2
1
1
=
+
+
=
−
+
+
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
(P6.2)
Przekształcamy układ równań (P2.2) do postaci:
3
3
2
2
1
1
3
3
0
2
2
1
1
sin
l
sin
l
sin
l
cos
l
l
cos
l
cos
l
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
−
=
+
−
=
−
+
(P6.3)
Po wprowadzeniu oznaczeń:
,
sin
l
B
,
l
cos
l
A
1
1
0
1
1
ϕ
ϕ
=
−
=
otrzymamy:
3
3
2
2
3
3
2
2
sin
l
sin
l
B
cos
l
cos
l
A
ϕ
ϕ
ϕ
ϕ
−
=
+
−
=
+
(P6.4)
Równania (P6.4) podnosimy do kwadratu i dodajemy stronami
0
l
l
sin
Bl
2
B
cos
Al
2
A
2
3
2
2
2
2
2
2
2
2
=
−
+
+
+
+
ϕ
ϕ
(P6.5)
Równanie (P6.5) dzielimy przez
2
Al
2
0
sin
A
B
cos
Al
2
l
l
B
A
2
2
2
2
3
2
2
2
2
=
+
+
−
+
+
ϕ
ϕ
(P6.6)
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 12
Przyjmiemy oznaczenia:
2
2
3
2
2
2
2
Al
2
l
l
B
A
C
−
+
+
=
,
A
B
D
=
,
zatem (P2.6) przyjmie postać:
0
sin
D
cos
C
2
2
=
+
+
ϕ
ϕ
(P6.7)
Po podniesieniu (P2.6) stronami do kwadratu otrzymujemy:
0
)
D
C
(
cos
C
2
cos
)
D
1
(
2
2
2
2
2
2
=
−
+
+
+
ϕ
ϕ
(P6.8)
Po podstawieniu
2
cos
w
ϕ
=
otrzymamy równanie kwadratowe w postaci:
0
)
D
C
(
Cw
2
w
)
D
1
(
2
2
2
2
=
−
+
+
+
(P6.9)
z którego wyznaczymy dwa pierwiastki
,
w
,
w
2
1
a następnie dwie wartości
kąta
2
ϕ
, tj. kąty
)
2
(
2
)
1
(
2
,
ϕ
ϕ
.
Dwa rozwiązania równania kwadratowego (P6.9) odpowiadają dwóm warian-
tom położenia członów mechanizmu czworoboku przegubowego przy ustalo-
nym położeniu członu napędzającego
1
ϕ
co pokazano na Rys. 13. Kąt
3
ϕ
znajdziemy z równania (P6.4). Otrzymamy odpowiednio:
)
2
(
3
)
1
(
3
,
ϕ
ϕ
.
W celu wyznaczenia prędkości kątowej członów 2 i 3 różniczkujemy pierwsze
z równań (P6.2) i otrzymujemy:
0
sin
l
sin
l
sin
l
3
3
3
2
2
2
1
1
1
=
+
+
ϕ
ω
ϕ
ω
ϕ
ω
(P6.10)
gdzie:
,
dt
d
,
dt
d
,
dt
d
3
3
2
2
1
1
ϕ
ω
ϕ
ω
ϕ
ω
=
=
=
- pochodne kątów,
W celu wyznaczenia prędkości kątowej
3
ω
obracamy układ współrzęd-
nych o kąt
2
ϕ
. Równanie (P6.10) przyjmie postać:
0
)
sin(
l
)
sin(
l
)
sin(
l
2
3
3
3
2
2
2
2
2
1
1
1
=
−
+
−
+
−
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
ω
(P6.11)
a ponieważ wyrażenie
0
)
sin(
l
2
2
2
2
=
−
ϕ
ϕ
ω
to otrzymamy:
)
sin(
l
)
sin(
l
2
3
3
2
1
1
1
3
ϕ
ϕ
ϕ
ϕ
ω
ω
−
−
−
=
(P6.12)
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
Opracowali: J. Felis, H. Jaworowski str. 13
Analogicznie obracając układ współrzędnych o kąt
ϕ
3
mamy:
0
)
sin(
l
)
sin(
l
)
sin(
l
3
3
3
3
3
2
2
2
3
1
1
1
=
−
+
−
+
−
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
ω
(P6.13)
Ponieważ
0
)
sin(
3
3
=
−
ϕ
ϕ
to prędkość kątowa członu 2:
1
3
2
2
3
1
1
2
)
sin(
l
)
sin(
l
ω
ϕ
ϕ
ϕ
ϕ
ω
⋅
−
−
−
=
(P6.14)
W celu obliczenia przyspieszeń kątowych różniczkujemy równanie (P6.10)
0
sin
l
cos
l
sin
l
cos
l
sin
l
cos
l
3
3
3
3
3
2
3
2
2
2
2
2
2
2
1
1
1
1
1
2
1
=
+
+
+
+
+
ϕ
ε
ϕ
ω
ϕ
ε
ϕ
ω
ϕ
ε
ϕ
ω
(P6.15)
Przyspieszenie kątowe członu 3 -
3
ε
otrzymamy obracając układ współrzęd-
nych o kąt
ϕ
2
)
sin(
l
)
cos(
l
l
)
sin(
l
)
cos(
l
2
3
3
2
3
3
2
3
2
2
2
2
1
1
1
2
1
1
2
1
3
ϕ
ϕ
ϕ
ϕ
ω
ω
ϕ
ϕ
ε
ϕ
ϕ
ω
ε
−
−
+
+
−
+
−
−
=
(
P6.16)
Przyspieszenie kątowe członu 2 -
2
ε
otrzymamy obracając układ
współrzędnych o kąt
ϕ
3
)
sin(
l
l
)
cos(
l
)
sin(
l
)
cos(
l
3
2
2
3
2
3
3
2
2
2
2
3
1
1
1
3
1
1
2
1
2
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
ε
ϕ
ϕ
ω
ε
−
+
−
+
−
+
−
−
=
(P6.17)
Równania (P6.15), (P6.16) i (P6.17) ulegną uproszczeniu jeżeli prędkość
kątowa
const
1
=
ω
, wówczas przyspieszenie
0
1
=
ε
.
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
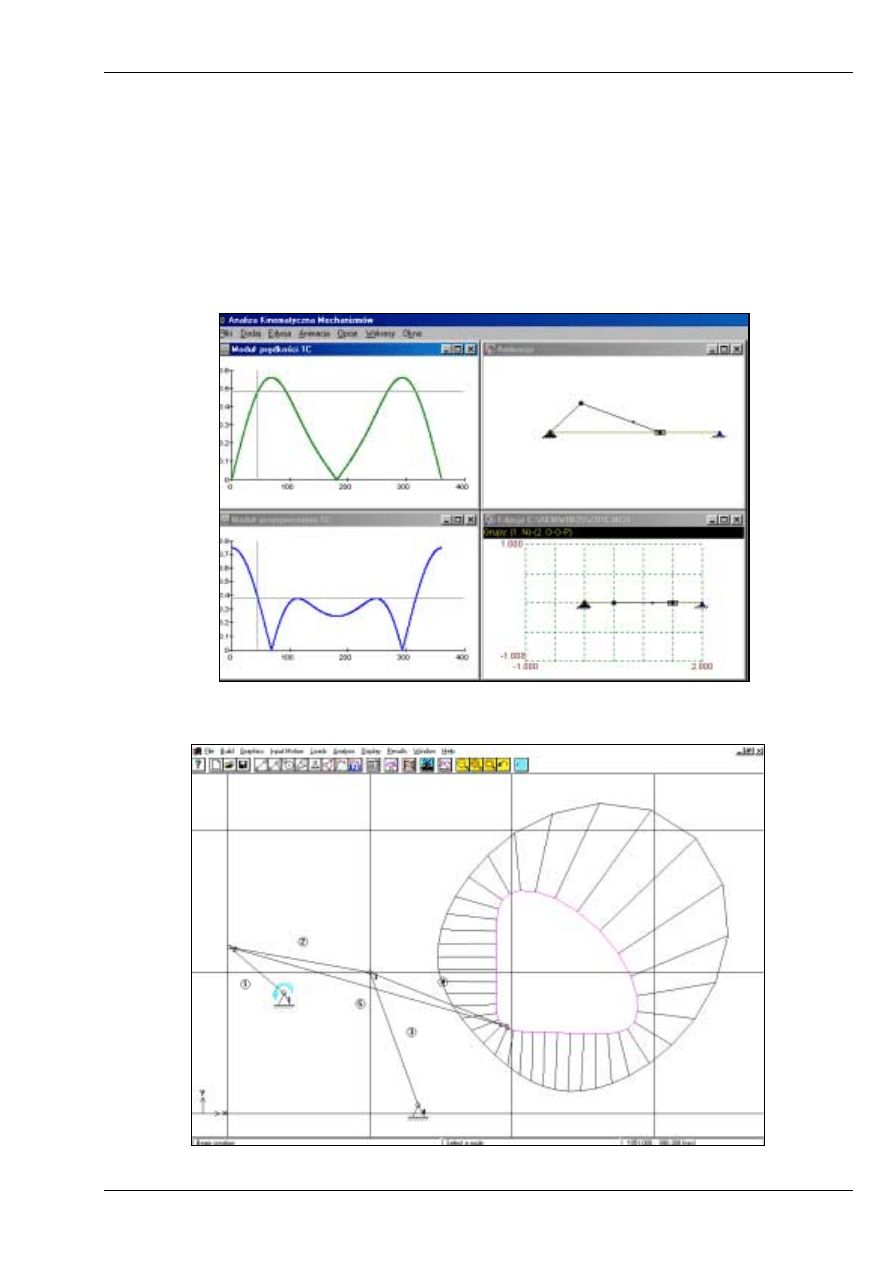
Opracowali: J. Felis, H. Jaworowski str. 14
Wspomaganie komputerowe analizy kinematycznej mechanizmów
Programy:
1. Analiza kinematyczna mechanizmów – AKM WIN 2,53 (ga-
laxy.uci.agh.edu.pl\~kmtmipa)
2. Simulation and Analysis of Mechanisms – SAM 4.2 (www.artas.nl)
3. Working Model
AKM WIN 2,53: analiza kinematyczną płaskich mechanizmów dźwigniowych
i krzywkowych
SAM: Analiza kinematyczna i kinetostatyczna (siłowa) mechanizmów płaskich
Zapis i Podstawy Konstrukcji Mechanicznych Kinematyka mechanizmów
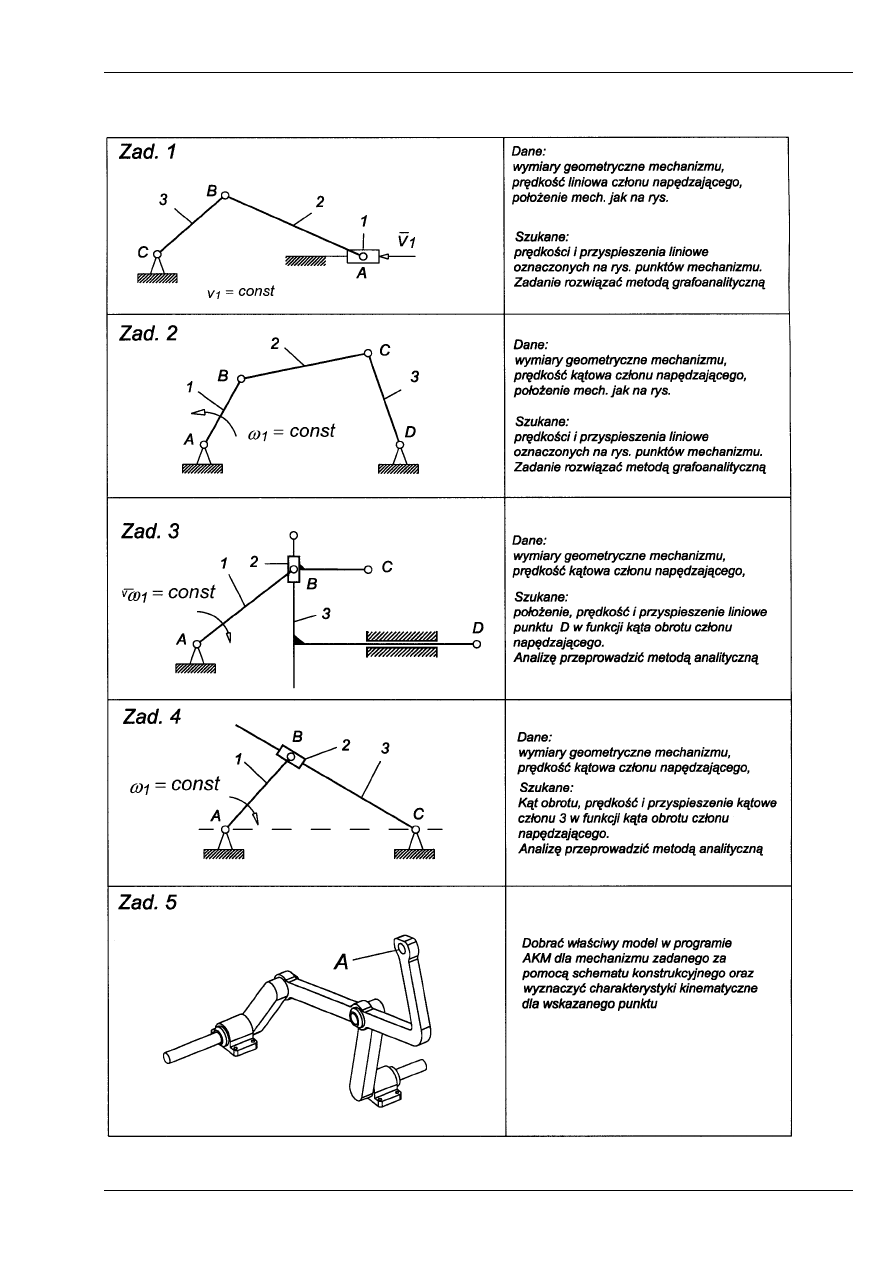
Opracowali: J. Felis, H. Jaworowski str. 15
ZADANIA DO ROZWIĄZANIA NA ĆWICZENIACH
Mechanizm
można również
zamodelować w programie SAM
Wyszukiwarka
Podobne podstrony:
3 kinematyka id 34358 Nieznany (2)
kinema1 id 234915 Nieznany
kinematykawyklad7 id 235023 Nieznany
lancuchy kinematyczne id 263224 Nieznany
IMIR przyklady kinematyka id 21 Nieznany
IMIC kinematyka c id 211805 Nieznany
Kinematyka 2010 id 234998 Nieznany
Kinemat punktu id 234923 Nieznany
Kinematyka odwrotna id 235013 Nieznany
Kinematyka 1D id 234997 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
więcej podobnych podstron