Pytania na kolokwium z podstaw mechatroniki 2009/2010
Z jakich podstawowych zespołów składa się układ mechatroniczny; wymień je i opisz funkcje spełniane prze te zespoły. Narysuj przykład wybranego układu mechatronicznego.
Wymień korzyści wynikające ze stosowania rozwiązań mechatronicznych; narysuj i opisz trzy przykłady takich rozwiązań.
Na przykładzie uniwersalnego schematu urządzenia mechatronicznego podaj podstawowe struktury oraz funkcje mechatroniczne systemów nastawczych.
Przedstaw na przykładach różnice pomiędzy klasycznymi napędami mechanicznymi i napędami mechatronicznymi.
Co to są sensory i mikrosensory; jaką spełniają funkcję w układach mechatronicznych - narysuj przykłady.
Narysuj schematy wybranych przykładów i omów na tych przykładach zasady działania aktorów mechanicznych, elektromagnetycznych, pneumatycznych.
Narysuj schemat systemu informacyjnego oraz opisz poszczególne części stosowane np. w robotach.
Narysuj i porównaj klasyczne rozwiązanie z rozwiązaniem mechatronicznym na przykładzie pułapki na myszy przedstaw schemat i opisz krótko zasadę działania
Z jakich podstawowych zespołów składa się układ mechatroniczny; wymień je i opisz funkcje spełniane prze te zespoły. Narysuj przykład wybranego układu mechatronicznego.
Układ mechatroniczny składa się z trzech podstawowych zespołów:
-element wykonawczy (aktor), za którego pomocą urządzenie mechatroniczne aktywnie oddziałuje na otoczenie, czyli bezpośrednio ingeruje (nastawia) w sterowany proces techniczny; są to głównie elementy mechaniczne. Aktor jest to urządzenie które zmienia prąd elektryczny w inną wartość fizyczną
-czujniki (sensory), za których pomocą urządzenie mechatroniczne zdobywa niezbędne informacje o procesie; elementy te w swojej pracy wykorzystują technikę pomiarów.
-przetworniki informacji (procesory), za których pomocą urządzenie mechatroniczne odpowiednio przetwarza (oblicza, kieruje, przełącza) informacje; są to elementy techniki komputerowej.
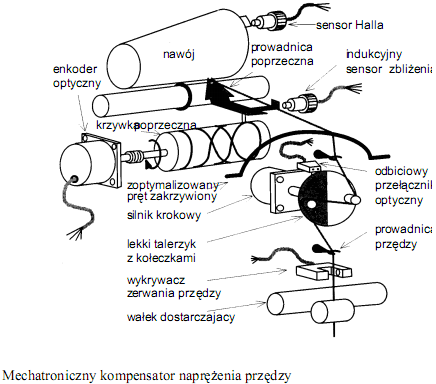
JAK DZIAŁA KOMPENATOR NAPRĘŻENIA PRZĘDZY.
PRSZYPISAĆ PODANE ZESPOŁY DO PRZYKŁADU
STWORZCIE ZDANIE W KTÓRYM ZAWRZECIE ŻE:
INFORMACJI NA WEJŚCIU I WYJŚCIU AKTORA SĄ ANALIZOWANY I TYM SAMYM KONTROLOWANA JEST PRACA WYKONYWANA PRZEZ AKTOR
Wymień korzyści wynikające ze stosowania rozwiązań mechatronicznych; narysuj i opisz trzy przykłady takich rozwiązań.
1. Poszerzenie charakterystyk.
Zastosowanie urządzenia mechatronicznego może rozszerzyć lub poprawić dokładność, szybkość pracy czy elastyczność zastosowania, zredukować wymagania eksploatacyjne, poprawić niezawodność. Cechą charakterystyczną układów mechatronicznych jest zjawisko synergi ,czyli uzyskiwania w wyniku połączenia kilku elementów efektów lepszych niż można uzyskać sumując działanie każdego urządzenia z osobna.
2. Uproszczenie złożonych mechanizmów.
System mechatroniczny może zastąpić jeden lub kilka skomplikowanych mechanizmów.
3. Innowacyjność.
Zastosowanie mikroprocesorów umożliwia stworzenie produktów czy systemów, które dotychczas nie mogły być zrealizowane. Chodzi tu przede wszystkim o roboty i maszyny, które wymagają zaawansowanych technologii sensorycznych, jak np. rozpoznawania obrazu. Dwa pierwsze powody nie wykluczają się wzajemnie. W wielu przypadkach zastosowanie mikroprocesorów daje podwójną korzyść: poprawia osiągi i czasem obniża koszty takiego urządzenia, jednak zastosowanie systemów mechatronicznych nie zawsze jest tanim rozwiązaniem jednak często pozwala na oszczędność w etapach produkcji.
4. Samodzielność.
System mechatroniczny MOŻĘ BYĆ W STANIE- za pomocą czujników (sensorów) - odbierać ze swego otoczenia sygnały, przetwarzać i interpretować je (za pomocą mikroprocesorów) i na tej podstawie reagować - za pomocą elementów wykonawczych (aktorów) - odpowiednio do sytuacji. Przez to jest elastyczny i może być stosowany w różnorodnych zadaniach.
5.Poprawa niezawodnośći
Ciśnienie tworzone przez mechaniczne naciśnięcie dźwigni hamulca przekazywane jest przez przewód hamulcowy do modulatora ciśnienia w którym zawór sterujący steruje ciśnieniem doprowadzanym do zacisku hamulca .W modulatorze ciśnienia znajduje się również siłownik elektormagetyczny który ma za zadanie wytwarzać dodatkowe ciśnienie do układu w razie potrzeby .Całość sterowana jest przez moduł sterujący który dostaje informacje od sensora obrotów koła Który za pomocą informacji odczytywanych z koła impulsowego dostarcza danych na temat obrotu koła.
Układem sterujemy poprzez joystick który przkazuje analogowy sygnał do przetwornika analogowo cyfrowego .Sygnał wychodzi z przetwornika do mikrokomputera który analizuje wszystkie dostarczone dane i wysyła sygnał do przetwornika analogowo cyfrowego Sygnał po przetworzeniu przekazywany jest do obwodów interfejsowych oraz wzmacniacza po czym kierowny jest do zaworów elektormagnetycznych które sterują dostarczanym przez układ zasilający (silnik pompa filtr) olejem który dostarczany jest do siłowników .Dokonywany jest odczyt położenia poszczególnych siłowników za pomocą sensorów wysunięcia tłoczyska .Sygnał ten jest połączony z systemem obwodów interfejsowych i wzmacniaczem a następnie przetwarzany przez przetwornik analogowo cyfrowy i dostarczany do mikrokomputera Który go analizuje.
KONKRETNE OKREŚLENIE DOTYCZĄCE WYMAGAŃ EKSPLOATACYJNYCH JEST POZYTYWNE CZY NEGATYWNE
OPIS SCHEMATÓW I KOMENTARZE
3. Na przykładzie uniwersalnego schematu urządzenia mechatronicznego podaj podstawowe struktury oraz funkcje mechatroniczne systemów nastawczych.
Podstawowe funkcje mechatronicznych systemów nastawczych:
Sterowanie
Regulacja pozycyjna i kaskadowa
Ograniczenie sygnału nastawczego i dozorowania wartości granicznej
Samonastawna regulacja
Korekcja charakterystyk statycznych
Kompensacja tarcia, histerezy i strat
Dozór i diagnoza aktora
Struktura:
Mechatroniczny system nastawczy składa się z :
Płaszczyzny kierowania (nadrzędne jednostki funkcjonalne)
Magistrali danych
Płaszczyzny komputera (uzyskiwanie i obróbka informacji, komunikacja)
Płaszczyzny procesu (wzmocnienie, napęd, sensoryka)
Źródła energii pomocniczej
KOENTARZE DO SCHEMATU I DO HASEŁ
4. Przedstaw na przykładach różnice pomiędzy klasycznymi napędami mechanicznymi i napędami mechatronicznymi.
Klasyczny napęd mechaniczny Napęd mechatroniczny
-jeden dlugi wał transmisyjny, sztywno - wiele pojedynczych napędów
łączący napędy odgałęzione synchronizowanych elektronicznie -przekładnia zębata, pas zębaty -przekładnia elektroniczna
-krzywka, przekładnia o ruchu - cykliczny tor ruchu
programowany jako funkcja
matematyczna „krzywka
elektroniczna”
-sprzęgło włączalne -synchronizacja z poruszającym
się celem
-przekładnia z nakładającymi -bieg synchronizowany
się ruchami z nakładającym się
pozycjonowaniem
KOMENTARZE ORAZ PRZYKŁADY ZASTOSOWAŃ
5. Co to są sensory i mikrosensory; jaką spełniają funkcję w układach mechatronicznych - narysuj przykłady.
Sensorem (czujnikiem) nazywamy przetwornik wejściowy. Zwykle czujniki podają sygnał analogowy, który musi być przetworzony na sygnał cyfrowy. Jednostka przygotowująca sygnał to wzmacniacz, filtr, przetwornik analogowo-cyfrowy . Sensor może być zdefiniowany jako czujnik pomiarowy, który odbiera wartości mechaniczne, chemiczne, termiczne lub
optyczne i przetwarza je w sygnały elektryczne, a więc jako przetwornik nieelektrycznej wielkości fizycznej w sygnał elektryczny.
Sensory tworzą istotną część systemów przetwarzania informacji wyjście z sensora może być
również użyte do sterowania procesem mechanicznym.
Z punktu widzenia mechatronizacji napędów mechanicznych szczególną rolę odgrywają sensory pozycji (położenia, drogi przemieszczenia), mniejszą - sensory prędkości i sensory obecności. Sensory pozycji Mierzą drogi, długości, kąty i położenia. Sensory prędkości nazywane są zwykle prądnicami tachometrycznymi, tachogeneratorami czy tachometrami. Mierzą one prędkości kątowe i liczby obrotów.
Czujnik (Sensor) - fizyczne bądź biologiczne narzędzie, będące najczęściej elementem składowym większego układu, którego zadaniem jest wychwytywanie sygnałów z otaczającego środowiska, rozpoznawanie i rejestrowanie ich.
W naukach technicznych czujnik to urządzenie, dostarczające informacji o pojawieniu się określonego bodźca, przekroczeniu pewnej wartości progowej lub o wartości rejestrowanej wielkości fizycznej. W tym ujęciu układ czujnika składa się z: czujnika, przetwornika oraz często układu kondycjonowania sygnału i telemetrycznego. Najczęściej spotykanymi czujnikami są czujniki dostarczające informację w jednej z wielkości elektrycznych takich jak: napięcie, natężenie prądu, opór elektryczny. Przyczyną tego jest fakt, że prąd elektryczny to sygnał, który łatwo wzmocnić, przesłać na duże odległości, poddać dalszemu przetwarzaniu lub przy użyciu technik cyfrowych i komputerów a także zachować.
Powyższa definicja, uprzednio zmodyfikowana, mogłaby odnieść się równie dobrze do narządów w sensie biologicznym, szczególnie narządów zmysłów. Dzięki rozwojowi teorii systemów, termin ten wszedł również szeroko do nauk społecznych, szczególnie psychologii (kognitywizm).
Mikrosensor - niewielkie urządzenie elektryczne o funkcji układu mechatronicznego. Redukcja rozmiarów sensora prowadzi zwykle do wzrostu obszaru jego zastosowania. To z kolei rodzi nowe potrzeby w zakresie sensorów małych (mikrosensorów) i zintegrowanych, które w pełni wykorzystują zalety technologii obwodów scalonych.
Funkcja w układzie mechatronicznym: Sensory odgrywają bardzo ważną rolę w mechatronizacji, gdyż są podstawowym źródłem określenia położenia, prędkości bądź obecości badanego elementu. Pozwala to na stworzenie sprzężenia zwrotnego regulującego pracę układu i rekompensującego odchyłki od nastawionej/żądanej wartości.
Użycie wiązki laserowej w metodzie triangulacyjnej czy interferometrycznej może być widziane jako mikrosensor.
MIKROSENSOR TO MAŁY SENSOR
DLACZEGO I KIEDY STOSUJEMY MIKROSENSORY A KIEDY SENSORY
OPIS I PRZYKŁADY
6. Narysuj schematy wybranych przykładów i omów na tych przykładach zasady działania aktorów mechanicznych, elektromagnetycznych, pneumatycznych.
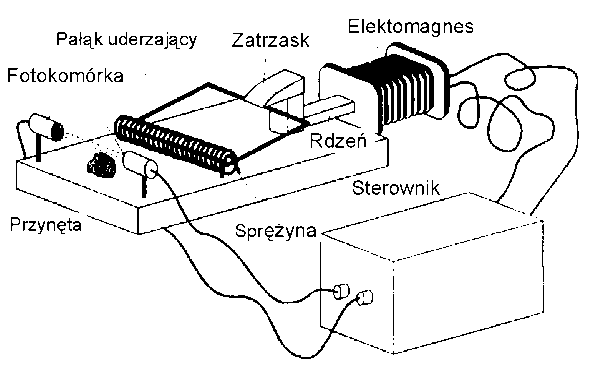
W tej pułapce na myszt zastosowano działanie aktora
elektormagnetycznrgo, którego celem jest zwolninie zatrzasku
w celu odpespieczenia pałąka uderzającego.
Zwolnienie następuje przez sygnał nadany ze sterownika który to natomiast
Zczytuje informacje z fotokomrki.
W „inteligentnym”
siłowniku przetworniki (sensory pozycji i prędkości tłoczyska), zawory elektromagnetyczne
(serwozawory) i obwody interfejsowe umieszczone są w obudowie
siłownika. Taka filozofia konstruowania pozwala traktować siłownik hydrauliczny
podobnie jak urządzenia elektroniczne; jako coś, co może być prosto przyłączone
do standardowej magistrali (standard bus). Jedyna różnica polega na tym, że wymaga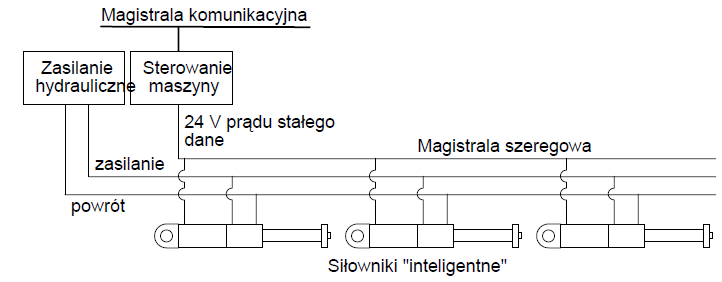
on zarówno przyłączenia siłowego zasilania hydraulicznego jak i elektrycznego.
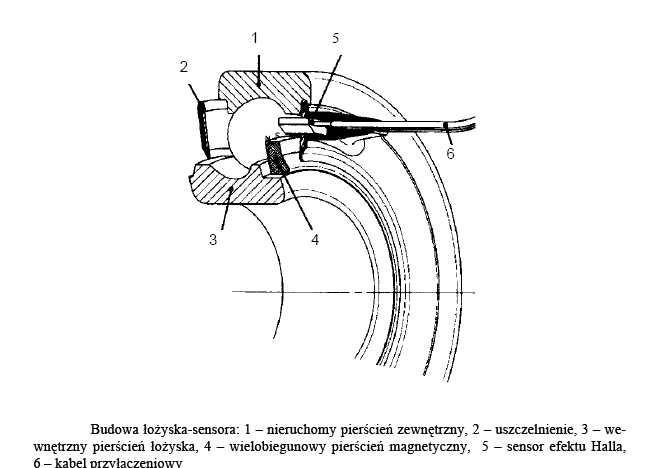
Łożysko toczne (aktor mechaniczny) wyposażone w sensor wspomagający określenie np. położenia łożyska prędkości.
OPIS AKTORA W PODANYM PRZYKŁADZI
7. Narysuj schemat systemu informacyjnego oraz opisz poszczególne części stosowane np. w robotach.
System informacyjny składa się z czujników(sensorów) , przetworników informacji(procesorów) oraz elementów wykonawczych (aktorów).
Wielkość wejściowa wyczuwana jest przez sensor zwany przetwornikiem wejściowym. Sensor jest to czujnik który odbiera wartości fizyczne, chemiczne lub inne i przetwarza je w sygnał elektryczny. Za pomocą czujników układ zdobywa informację o procesie. Sygnał z sensora często jednak wymaga modyfikacji. Do przygotowania sygnału do dalszej obróbki często wykorzystujemy wzmacniacze, przetworniki analogowo-cyfrowe, filtry. Następnie sygnał jest przetwarzany w procesorze który oblicza, przełącza lub odpowiednio kieruje sygnał.
Na koniec sygnał po przetworzeniu w procesorze wyświetlany jest np. na ekranie, bądź zapisywany na nośniku. Każde urządzenie które przetwarza sygnał elektryczny na nieelektryczna wielkość nazywamy aktorem. Są to elementy wykonawcze ingerujące bezpośrednio w proces techniczny
PRZYKŁAD TECHNICZNY
8. Narysuj i porównaj klasyczne rozwiązanie z rozwiązaniem mechatronicznym na przykładzie pułapki na myszy przedstaw schemat i opisz krótko zasadę działania
Klasyczna pułapka na mysz
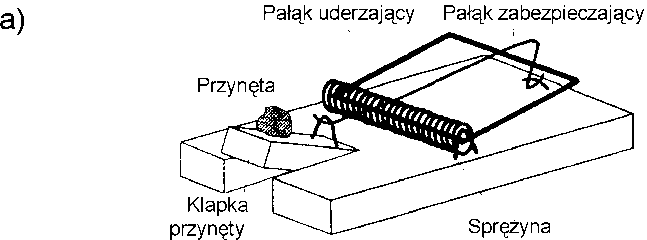
Na ruchomej klapce znajduję się przynęta (sensor). Przemieszczenie się klapki w dół powoduję odgięcie pałąka zabezpieczającego (sterowanie mechaniczne), który zwalnia pałąk uderzający (aktor) napędzany siłą zmagazynowaną w sprężynie.
Mechatroniczna pułapka na myszy
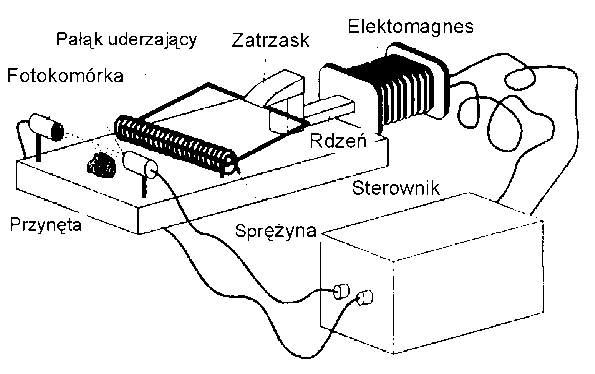
Przynęta znajduję się pod wiązką fotokomórki (sensor). Przecięcie wiązki powoduję wysłanie sygnału do sterownika (sterowanie elektroniczne), który następnie wysyła sygnał do elektromagnesu (aktor) w celu cofnięcia zatrzasku. Cofnięty zatrzask uwalnia pałąk uderzający (aktor) napędzany siłą zmagazynowaną w sprężynie.
Oba rozwiązania spełniają dokładnie tą samą funkcje (zabijanie myszy). Jednakże rozwiązanie mechatroniczne jest znacznie bardziej kosztowne. Przez co sens tworzenia takich konstrukcji jest żaden.
Rozwiązanie mechatroniczne miałoby sens wtedy, gdy myszy były by łapane żywe i w trybie automatycznym (łapanie kolejnych myszy bez ingerencji człowieka)
9. Porównaj różnice podejścia klasycznego i mechatronicznego do projektowania urządzeń.
Projektowanie klasyczne opiera się na dodawaniu kolejnych części składowych, przez co otrzymujemy obszerne, złożone mechanizmy, stwarzające dodatkowe utrudnienia- np. z duża ilością kabli. Występują sztywne konstrukcje, sterowanie liniowe, analogowe. Precyzję zapewniają małe tolerancje. Wielkości namierzane zmieniają się dowolnie. Mamy możliwość jedynie prostego monitorowania, a zdolności urządzenia są ustalone i niezmienne.
Mechatroniczne projektowanie dąży do integracji elementów, poprzez tworzenie prostych mechanizmów o kompaktowej budowie oraz jednostek autonomicznych. Problem okablowania rozwiązuje komunikacja bezprzewodowa. Występują elastyczne konstrukcje z tłumieniem elektronicznym, sterowanie cyfrowe, nieliniowe z wykorzystaniem sprzężenia zwrotnego. Precyzja dzięki licznym pomiarom oraz wykorzystaniu sprzężenia zwrotnego. Sterowanie następuje oszacowanymi wielkościami namierzanymi. Mamy możliwość nadzoru wraz z diagnostyką uszkodzeń, a urządzenia posiadają zdolność „uczenia się”.
PROJEKTOWANIE KLASYCZNE WYMAGA PROJEKTU WSTĘPNEGO ROZEZNANIA KONSTRUKTORA W DANYM ZAGADNIENIU PRZEWIDYWANIA I ANALIZIE. ROZWOJ KLASYCZNEGO PROJEKTOWANIA POPRZEZ DOŁĄCZANIE NOWYCH ELEMENTÓW TJ.ELEMENTY WSPOMAGAJĄCE PROJEKTOWANIE POZWOLIŁO NA POWSTANIE PROJEKTOWANIA MECHATRONICZNEGO. OBECNIE POWSTAJĄ PROJEKTY ZŁOŻONE Z UKŁADÓW SCALONYCH
3
Wyszukiwarka