Akademia Górniczo - Hutnicza W Krakowie |
Wykonał: Mateusz Serafin |
||||||
Wydział: EAIiE |
Rok akad.: 2009 / 2010 |
Rok studiów: II |
Kierunek: Elektrotechnika |
Grupa: 5.2 |
|||
Temat ćwiczenia: Regulator cyfrowy |
|||||||
Data wykonania: |
Data zaliczenia: |
Ocena: |
|||||
Wprowadzenie teoretyczne
Regulator jest podstawową częścią każdego układu regulacji. Jego zadaniem jest wytworzenie sygnału sterującego, który zapewni uzyskanie i utrzymanie nastawionych przez użytkownika wartości (na przykład poziomu cieczy w zbiorniku, prędkości obrotowej silnika, położenia tłoka w cylindrze siłownika, wielkości przepływu, temperatury w pomieszczeniu, wartości prądu spawania , napięcia na zaciskach zasilacza i innych). Regulator ma co najmniej jedno wejście i jedno wyjście. Regulator pracuje zawsze w układzie z zamkniętą pętlą sprzężenia zwrotnego - tylko wtedy możliwy jest proces regulacji.
Ogólny schemat układu regulacji :
Symbole na rysunku :
X(s)- sygnał zadający
Z- zadajnik( przetwarza sygnał zadany przez użytkownika na unormowany sygnał wejściowy Y0(s) )
E(s)-sygnał uchybu ( różnica pomiędzy sygnałem zadanym a sygnałem na wyjściu )
R- regulator
S(s)-sygnał sterujący
UW- układ wykonawczy ( najczęściej wzmacniacz wzmacniający wygnał sterujący )
Sw(s)- wzmocniony unormowany sygnał sterujący
Z(s)- zakłócenia
O-obiekt sterowany
Y(s) -sygnał wyjściowy
PP- przetwornik pomiarowy - dopasowuje wygładza i normuje sygnał wyjściowy
Ym(s)- unormowany sygnał wyjściowy
Regulator PID jest obecnie najpopularniejszym urządzeniem stosowanym do regulacji w ciągłych i dyskretnych układach sterowania. Zastosowanie regulatora PID gwarantuje uzyskanie najlepszych właściwości dynamicznych (czas regulacji, trajektoria) oraz statycznych (błąd statyczny) układu. Jest to regulator uniwersalny, nadający się do pracy w każdym układzie regulacji.
Parametrami regulatora PID są:
•współczynnik wzmocnienia k
•czas całkowania Ti nazywany również czasem zdwojenia
•czas różniczkowania Td
Dla regulatora ciągłego typu PID obowiązuje równanie:

gdzie:
![]()
, ![]()
, ![]()
- współczynniki wzmocnienia części proporcjonalnej, całkującej i różniczkującej regulatora
Przy wprowadzeniu cyfrowej wersji regulatora sygnał u(t) należy z dyskretyzować, a więc zastosować w układzie sterowania przetwornik typu A/C oraz określić częstotliwość próbkowania. Dla okresu próbkowania Tp z wyrażenia na u(t) wynika następujące równanie różniczkowe:

przy założeniach:
- całkowanie wykonane zostało metodą prostokątów
- pochodna aproksymowana jest różnicą dwupunktową
Argumentem w powyższym wzorze nie jest czas tylko numer próbki oznaczony przez k. Próbka dla t=0 ma numer 1, numer zerowy nie jest określony. W celu zapewnienia poprawnej interpretacji wyrażenia u(k) w chwili początkowej czyli dla k=1 przyjmuje sie, że próbki dla t<0 nie istnieją
Tej postaci algorytm nazywamy pozycyjnym, wymaga on w obliczenia w każdym takcie próbkowania pełnej wartości sygnału wyjściowego. Korzystniejsze jest jednak stosowanie algorytmy przyrostowego, który oblicza tylko pożądana wartość zmiany sygnału wyjściowego Δu(k) w każdym takcie próbkowania.
Aby określić algorytm przyrostowy, należy napisać równanie algorytmu pozycujnego dla (k-1) próbki a nastepnie obliczyć przyrost sygnału wyjściowego jako: ![]()
więc
u(k-1)= Kp
e(k-1)+KiTp
+
[e(k-1)-e(k-2)]
Stąd po odjęciu sygnału U(k-1) od U(k) otrzymujemy:
u(k)=e(k)[Kp+
]+e(k-1)[-Kp+KiTp -
]+e(k-2)[
]
q0 =Kp+
q1=-Kp+KiTp -
q3=
stąd dla regulatora PID otrzymuje się:
u(k)= q0e(k)+ q1e(k-1)+ q3e(k-2)
Otrzymane stałe są traktowane jako nastawy regulatora cyfrowego, zależą od stałych Kp,Ki,Kd oraz Tp
Tp- czas próbkowania został na początku ustalony na 0,05s
Przebieg cwiczenia
W ćwiczeniu obserwowaliśmy działanie regulatora PID, oraz zachowanie się układu pod wpływem zmiany współczynników. Symulacje dokonywane były programem MATLAB-SIMULINK.
I) układ podstawowy
przedstawiony jest na poniższym schemacie :
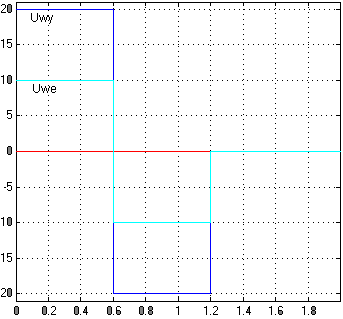
Sygnał wejściowy układu:
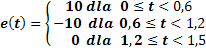
sygnał ten biegnie do bloków gain , gain1, gain2 lecz do bloku gain wchodzi niezmieniony , do bloku gain1 opóźniony jednokrotnie a do gain2 opóźniony dwukrotnie.
Obserwacje zachowania się układu pod wpływem ustawienia odpowiednich współczynników :
1.Kp=2 2.Ki=10
3.Kd=0.1.
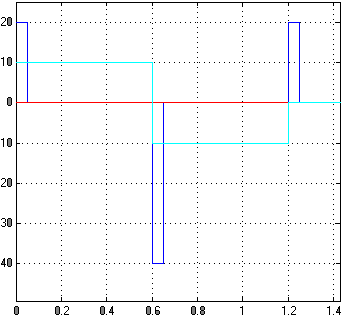
Widać że dla pierwszego przypadku (Kp=2) amplituda sygnały wejściowego wzrosła dwukrotnie, współczynnik Kp odpowiada za część proporcjonalną zatem osiągnęliśmy przewidywany rezultat.W drugim przypadku (Ki=10)dokonało się całkowanie sygnału wejściowego również zgodnie z oczekiwaniami .Nauczeni doświadczeniem z poprzednich badań wiemy iż krok całkowania odpowiada za linearyzacje sygnału wyjściowego ( im mniejszy tym lepsza linearyzacjaPrzykład 3 przedstawia różniczkowanie sygnału wejściowego.
4.Kp=2,Ki=10 Kd=0.1
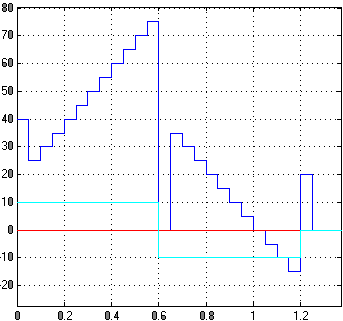
W czwartym przykładzie współczynniki zostału ustawione na dane wartości. Na wykresie widoczny jest wpływ wszytkich części wzmocnień regulatora.Obserwujemy zarówno wzmocnienie sygnału , jego całkowanie jak i zmiany wynikające z części różniczkującej.
II) inna wersja układu (z ograniczeniami amplitudy Ogr1=30 oraz Ogr2=-30)
Powyżej został opisany regulator typu PID w formie tzw. algorytmu przyrostowego, opis ten można przekształcić do postaci nawiązującej do struktury PID regulatora
gdzie:
![]()
1.Kp=2
Kp=4
W pierwszym przypadku obserwujemy sytuację identyczną jak poprzednio , natomiast gdy zwiększymy wartość wzmocnienia części proporcjonalnej do 4 ograniczenia ustawione w tym podpunkcie powodują iż wartość amplitudy nie zwiększy się ponad wartość ograniczającą.
2. Ki=10
wprzypadku części całkującej obserwujemy działanie ograniczeń objawiające się tym iż w miejscach gdzie wcześniej całkowanie przebiegało (poziom +30 i -30 ) teraz przebieg wyjścia został zastąpiony stałym.
3.Kd=0.1
W tym przykładzie sytuacja jest nico odmienna gdyż ograniczenia obserwujemy wyłącznie po ujemnej części amplitudy.
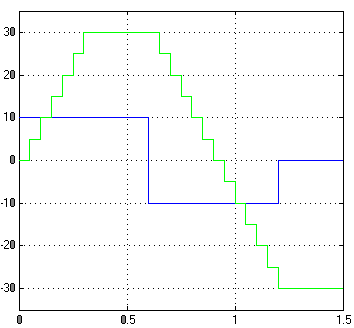
4.Kd=2,Ki=1,Kd=0.1
W tym przykładzie nastawione zostały wszytkie współczynniki , a więc otrzymujemy regulator PID.
Wprowadzenie ograniczeń zaowocowało wystąpieniem stałych wartości amplitudy w niektórych miejscach ( poziomy +30 i -30 ) ponieżj ograniczeń sygnał wyjścia zachowuje się tak samo jak w poprzednim podpunkcie.
układ po zmianie czasu prubkowania
Zmieniliśmy czas próbkowania z 0,05 na wartość o połowę mniejszą czyli 0,025 , zostawiając wcześniej ustalone wartości współczynników czyli :
Kd=2,Ki=1,Kd=0.1
W przypadku szybkich zmian sygnału na wejściu regulatora skrócenie czasu próbkowania poprawia dokładność obliczenia pochodnej. Stąd widoczny jest wyraźny wzrost sygnału będącego wynikiem różniczkowania. Ponadto skracanie czasu próbkowania poprawia całkowanie i dąży do linearyzacji miejsc całkowania na wykresie
WNIOSKI
Regulator PID jest układem złozonym posiadającym swoje części składowe mogące działać osobno .Wówczas otrzymujemy :
Część proporcjonalną (P), zalezny jedynie od parametru Kd. Tego typu układ charakteryzuje się małą dokładnością i małą szybkością regulacji .
Część całkująca (I) , jak wiemy całkowanie w dużej mierze zalezy od kroku całkowania .Wspólnie z częścią proporcjonalną można stworzyc regulator PI który jest zależny od dwóch parametrów Ki oraz Ti.Tego typu regulator sprawdza się w sytuacji gdy potrzebna jest duża dokładność regulacji.
Część różniczkująca (D) . Tak samo jak w poprzednim przypadku również tutaj istnieje możliwość zbudowania układu PD zależnego od wzmocnienia Kd oraz od czasu Td.Tego typu układ jest raczej rzadko stosowany . Typowe problemy regulacji, wymagające zastosowania regulatora PD to stabilizacja położenia kulki na równi oraz problem odwróconego wahadła
Czas próbkowania ma bardzo duże znaczenie.Od niego zależy krok całkowania, liczenie pochodnych więc ma to wpływ na dokładność wyników.
Ograniczenia są bardzo przydatne wówczas gdy chcemy utrzymać dany sygnał w określonych przedziałach Mamy pewność iż mimo zadanego wzrostu amplitudy , całkowania czy różniczkowania przebieg sygnału nigdy nie wykroczy ponad określone przez nas wartości.
Wyszukiwarka