I Modelowanie - cele, etapy, zasady - Modelem matematycznym systemu (obiektu) lub procesu jest zestaw wzorów matematycznych, ogólnie zestaw relacji matematycznie logicznych)określających zależności pomiędzy wyrażanymi wielkościami. Są to wielkości wejściowe i wyjściowe systemu, a system taki nazywamy względnie odosobnionym. Dobór określonego modelu z określonej klasy, wprowadza się kryterium, które będzie rozróżniać który model lepszy który gorszy, że minimalizując kryterium można uzyskać algorytm identyfikacji, żeby jakieś dane pomiarowe przekształcić na dany parametr. Półkryterium, wyjście obiektu, wyjście modelu System jest pewną całością, w której współdziałają wyodrębnione części składowe. Funkcjonowanie systemu zależy od funkcji części składowych i związków między nimi. Powiązania części składowych Określają strukturę systemu. cele budowy modelu systemu
Warunkach oddziaływania na system - model prognostyczny
Etapy modelowania matematycznego
Modelem matematycznym systemu (obiektu, procesu) jest zestaw wzorów matematycznych (ogólnie zestaw relacji matematyczno-logicznych) określających zależności pomiędzy wyróżnionymi wielkościami. Są to wielkości wejściowe i wyjściowe systemu, a system taki nazywamy Względnie odosobnionym. W pojęciach wejście i wyjśćie zawarte jest domniemanie o związku Przyczynowo-skutkowym między tymi wielkościami, w tym sensie , że znając (obserwując) wejście można określić jakie będzie wyjście Weryfikacja modelu jest to porównanie wyników modelowania z zachowaniem się systemu rzeczywistego z punktu widzenia zgodności z wiedzą teoretyczną oraz badaniami empirycznymi Kryteria wewnętrzne : -zgodność formalna -zgodność algorytmiczna Kryteria zewnętrzne : -zgodność heurystyczna -zgodność pragmatyczna 1.zgodnść replikatywna 2.zgodność predykatywna 3.zgodnść strukturalna
II Sformuluj zadanie identyfikacji
Suma odległości rzeczywistych od modelowych musi być jak najmniejsza (liczymy min. po a)
wyznaczenie
III Opisz zadanie analizy w sterowaniu systemu- Narysować kółeczko i powiedzieć, że to jest system i powiedzieć, ze polega to na tym, że badamy odpowiedź systemu na różne wymuszenia i dlatego to robimy żeby nabrać przekonania jak system reaguje na różne wymuszenia Zadaniem analizy jest badanie zachowania się systemu o znanym modelu; wartościach parametrów oraz przyjętych wielkościach działających na system z zewnątrz. Analiza ilościowa - Polega na wyznaczeniu wartości interesujących nas wielkości lub wskaźników jakości charakteryzujących..... Wyznaczenie dla danego procesu takiego momentu w którym: rozmiar produkcji y(T) osiągnie zadaną wartość należy znaleźć wartość T spełniającą równanie wzorek gdzie c jest zadaną wartością y(T). Ogólnie dla obiektu statycznego y = F(x). Typowe zadanie analizy polega na znalezieniu wyjść y dla danych wartości wejść x. Dla obiektów dynamicznych analogicznie zadanie polega na wyznaczeniu przebiegu czasowego odpowiedzi na zadany przebieg wejścia x(t) przy znanych warunkach początkowych. ANALIZA ILOŚCIOWA
jeżeli znamy wartości liczbowe parametrów
wstawiamy dane Analiza jakościowa - czy system ma określone, interesujące dla nas wartości czy układ jest stabilny (czy powraca do stanu równowagi, po ustaniu zaburzeń, które go z tego stanu wytrąciły dąży do danej wartości)
IV Opisz zadanie syntezy w sterowaniu systemu - odwrotne do analizy - jest postawiony cel i należy wymyślić jak go zrealizować, czyli odrzucenie według zadania analizy. Poprzez odpowiednie kryteria dowiemy się jak to osiągnąć. Jak przygotować wejście i wyjście, aby układ reagował w odpowiedni sposób. Synteza\projektowanie - jako dobrać wejście oraz parametry żeby wyjście spełniało nasze oczekiwania (system powinien spełniać określone wymagania ilościowe i jakościowe). Sterownie - bieżące zmiany projektu spowodowane zmianami zakłóceń i polegające na wyznaczeniu oraz realizacji uaktualnianych decyzji. Przyjmijmy, że jeden z parametrów zmienił się lub zmienia (np. okresowo). Celem sterowania jest osiągnięcie pomimo zakłóceń pożądanych efektów. Dobieramy wejścia x (te które możemy) tak aby osiągnąć wyjście (y*). Przyczyną tego co się dzieje w systemie są wejścia oraz zakłócenia - skutki obserwujemy na wyjściu. Zakłócenia - wielkości, które mają wpływ na system, ale możemy je tylko obserwować - nie zmieniać. PROJEKTOWANIE - PODEJMOWANIE DECYZJI
dla danych wartości a oraz zadanych wartości
można wyliczyć decyzje
V Scharakteryzuj przyczyny właściwości dynamicznych systemów - Zmiany stanu energetycznego nie mogą następować niezwłocznie, bo wymagało by to mocy o wartości nieskończoność, a ponieważ takich źródeł nie ma to musimy się liczyć z intercją Droga przez opóźnienie w systemie - punkt przyłożenia wymuszenia i punkt obserwacji tych efektów wymaga przestrzeni, a skoro tak to pokonanie przestrzeni wymaga czasu, a to jest opóźnienie, które następuje pomiędzy wielkością wejściową a wyjściową
VI Omów pojęcie stanu układu dynamicznego - Zbór pewnych wielkości na podstawie których skumulowana jest cała historia systemów. Na podstawie zmiennych stanu jesteśmy w stanie przewidzieć zachowanie systemu w przyszłości. Własności dynamiczne systemów wynikają z działania następujących ogólnych zasad f i z y c z n y c h :
Stan systemu dynamicznego
Jest to najmniejsza liczba danych (wektor stanu) , których znajomość w danej chwili, przy znajomości wielkości wejściowych , począwszy od tej chwili - pozwala jednoznacznie określić stan i wielkości wyjściowe systemu w przyszłości. Wielkości stanu są więc zmiennymi wewnętrznymi systemu, które reasumują w sobie całą przeszłość i determinują jego przyszłość. Zdeterminowanie systemu wynika z postulatów :
VI Omów na przykładzie opis za pomocą równań stanów. Zbiór pewnych wielkości na podstawie których skumulowana jest cała historia systemów. Na podstawie zmiennych stanu jesteśmy w stanie przewidzieć zachowanie systemu w przyszłości.
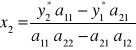
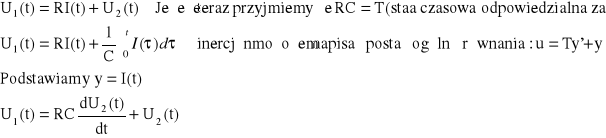
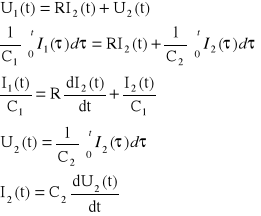
Zgodnie z 2- gim prawem Kirhoffa dla obwodu zamkniętego mamy:
Ostatni człon R2*I1(t)=U2(t), czyli wyjściu tego układu. W tak wyznaczonym równaniu jest zbyt wiele niewiadomych
Ogólna postać równania stanu: x'=ax+bu y=cx
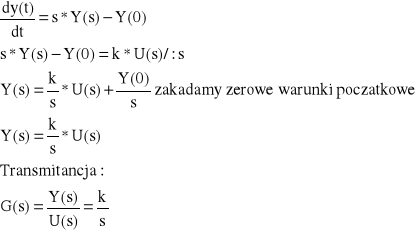
VII Omów na przykladzie opis za pomocą równania różniczkowego we-wy. Bierzemy jakiekolwiek równanie z obiektów dynamicznych. Piszemy równanie i piszemy, że to łączy przebiegi czasowe które pojawiają się na wejściu z tymi, które pojawiają się na wyjściu. Ponieważ są dynamiczne opis za pomocą równania różniczkowego jest adekwatny. Piszemy równanie np. obiekt inercyjny 1-go rzędu . Można dodać, że to równanie różniczkowe jest z takim ogólnym opisem, bo warunki początkowe są różne od zera. We wzorach różniczkowych można uwzględnić warunki różne od zera, czego nie można zrobić w postaci przypadku transmitancji.
(Rysunek- pyt. 6)
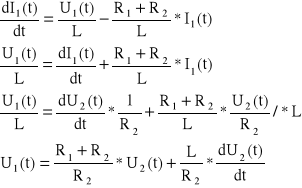
Nasze równanie wejścia ma poctaćU2(t)=R2*I1(t); różniczkujemy je obustronnie
podstawiając do równania **** i przeliczając otrzymamy
Ogólna postać różniczkowego równania we-wy.
U1(t)=a1U2(t)+a2U2'(t) u=a1y+a2y'
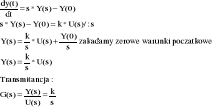
VIII Omów na przykładzie opis w postaci transmitancji. Transmitancja - transformata odpowiedzi do transformaty wymuszenia przy zerowych warunkach początkowych. Ten iloraz jest wartością stałą charakterystyczną dla danego obiektu. Wynika z tego, że dobrze służy do opisu obiektów, bo złożone systemy można łatwo analizować poprzez budowę schematów zastępczych z wykorzystaniem transmitancji, że łatwo wyliczać na podstawie transmitancji odpowiedź obiektu, bo w trudnej zmianie dziedziny czasu i równań różniczkowych przechodzimy na algebraiczne działania w postaci wielomianów zmiennej zespolonej n. - 4p.
Układ całkujący idealnie - równanie we-wy:
y' = ku zatem korzystając z właściwości transformaty otrzymujemy:
IX Omów na przykładzie odpowiedź skokową układu. Odpowiedź skokowa - to jest odpowiedź na skok jednostkowy, że to ma taki sens, że często badamy układy włączając zasilanie i patrząc jak to dążą do wartości zadanej i temu właśnie odpowiada odpowiedź skokowa i, że ta ka....kówke oznaczamy odpowiedź skokową to jest jak wyjście zachowuje się do wejścia. Na wejściu rysujemy skok, na wyjściu np. [zapłonu] inercyjnego. Że to jest opis dynamiki obiektu jeden z możliwych.
Układ całkujący idealnie - wyjście to całka wejścia
Równanie we-wy y'=ku zatem Korzystając z właściwości transformaty otrzymujemy:
Transformata odpowiedzi jednostkowej wynosi
Przebieg czasowy skoku jednostkowego otrzymamy przez transformatę odwrotną:
X Omów na przykładzie odpowiedź impulsową układu. „Napisać Co to jest ten impuls”. Może to posłużyć do obserwacji jak układ będzie się zachowywał przy nagle pojawiających się zakłóceniach krótkotrwałych, bo one mają właśnie charakter takich impulsów. Skoro wiemy jak ten układ reaguje na te impulsy to możemy zaplanować działania przeciwdziałające destabilizacji obiektu. Można podać związek z odpowiednią skokową, że jedna jest pochodną drugiej, albo, że odpowiedź impulsowa to jest transformata odwrotna transmitancji i pokazać to.
Równanie we-wy y'=ku zatem Korzystając z właściwości transformaty otrzymujemy:
Przebieg czasowy odpowiedzi impulsowej otrzymany przez transformatę odwrotna transmitancji układu:
Korzystając z odpowiednich tablic odpowiedź impulsowa jest pochodną odpowiedzi impulsowej.
XI Na przykładzie opisz Człon inercyjny Odpowiedź układu nie jest niezwłoczna tylko z taką inercją gdzieś się ustala ale po pewnym czasie. Wyrysować [styczna ] z lewej i powiedzieć - to jest stała czasowa - im większa stała czasowa tym później nastąpi to ustalenie tego wyjścia. Transmitanją to jest 1/Te+1 i jeszcze przykład (najlepiej elektryczny - czwórnik RC, RL)
Na początku musimy założyć że mamy zerowe warunki początkowe
Równanie we-wy
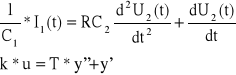
XII Człon całkujący z inercją Nieobciążony czwórnik RC
XIII Człon różniczkujący z inercją
Nieobciążony czwórnik RL.
k- współczynnik wzmocnienia
XIV Człon oscylacyjny
Nieobciążony czwórnik RLC
Powracamy do U1(t)
jeżeli wprowadzimy teraz że
Aby układ spełniał warunki oscylacji musi być zachowana zależność Tc<4TL inaczej inercyjny II rzędu ** ** <0 - niestabilny; =0 - drgania nietłumione; >0 - drgania tłumione XV Człon opóźniający Przykładem członu opóźniającego jest rurociąg.
Przyjmujemy że przewód rurociągu ma długość l i przekrój s. Przepuszcza w jednostce czasu q1(t) jednostek objętości cieczy. Pomijamy zjawiska spowodowane odkształceniem się rurociągu. Znajdujemy średnią prędkość przepływu cieczy:
Jeżeli w chwili od której liczymy czas (tzn. t=0), do wlotu rurociągu wpłynie cząstka cieczy, to możemy przyjąć, że dojdzie ona do wyjścia po upływie czasu W związku z tym natężenie q2(t) przepływu na końcu rurociągu wynosi q2(t)=q1(t-τ0) a zatem rozważany rurociąg jest członem opóźniającym o wzorze: y(t)=ku(t-τ0) h(t)=k 1(t-τ0).
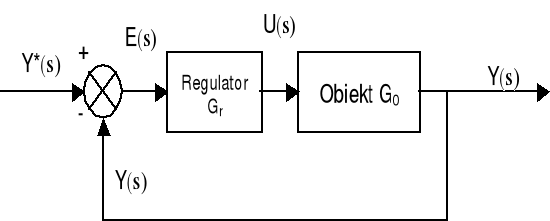
XVI Opisz i narysuj układ regulacji automatycznej.
E(s) - sygnał uchybu U(s) - sygnał nastawiający Błąd (uchyb regulacji) jest różnicą wartości zadanej Y*(s) obiektu i je go wartością rzeczywistą Y(s). E(s)=Y*(s)-Y(s) Rozpatrując poszczególne części układu na zasadzie we-wy. Dla regulatora mamy: U(s)=Gr(s)⋅E(s) Wyjście całego układu Y(s) = G0(s)⋅U(s)podstawiamy U(s) Y(s)=G0(s)⋅Gr(s)⋅E(s) Liczymy dalej E(s)=Y*(s)-G0(s)Gr(s)⋅E(s) Y*(s)=E(s)[G0(s)⋅Gr(s)+1] Transmitancja uchybowa jest ilorazem uchybu regulacji i jego wartości zadanej
Transmitancja zastępcza wynosi:
Dokonując dalszych przekształceń otrzymujemy, że:
z wyrażeniem wolnym. n = 0 układ statyczny.
wraz ze wzrostem czasu
ustalony astatyczny 1-go rzędu
do zera. Przy bardziej skomplikowanej wartości żądanej układ astatyczny 1-go rzędu nie wystarczy do zlikwidowania uchybu.
XVII. Wyznacz transmitancję wypadkową układu z ujemnym sprzężeniem zwrotnym w przypadku umieszczenia w torze sprzężenia zwrotnego członu H(s) oraz bez tego członu. Dwa proste rysuneczki. Obiekt ze sprzężeniem zwrotnym. Jakieś G(s), H(s) sprzężenie albo przez człon o transmitancji G(s) albo przez sprzężenie sztywne gdzie cały sygnał z wyjścia wprowadza się na wejście. Robimy 2 rysuneczki i wyprowadzamy wzory na zmiennej zespolonej [{male} L], że y=transmitancja obiektu razy U - jego wejście , czyli sterowanie to jest y. U = transmitancja regulatora razy U i 3 równanie, że y*-y=U i z tych 3 równań trzeba wyprowadzić transmitancję układu
Sprzężenie z członem H(s)
Mamy:
Transmitancja wypadkowa wynosi
Sprzężenie bezpośrednie
Transmitancje wypadkową otrzymamy przyjmując H(s)=1
a dla dodatniego sprzężenia zwrotnego
XVIII Wyznacz transmitancję układu n elementów połączonych szeregowo oraz róznolegle. Transmitancja szeregowa
Schemat dwuelementowy:
Łatwo zauważyć, że kolejne elementy schematu będą tworzyły układ o tych samych własnościach, gdyż praktycznie cały czas wpinamy człon, którego własności dynamiczne przed zmianą i po zmianie będą takie same. Teraz wykorzystamy definicję transmitancji. Sygnały wejściowe poszczególnych członów spełniają warunek: W1(s)=G1(s)⋅V1(s) W2(s)=G2(s)⋅V2(s)=G2(s)⋅W1(s)=G2(s)⋅G1(s)⋅V1(s) ogólnie: Wn(s)=Gn(s)⋅Vn(s)=Gn(s)⋅Gn-1(s)⋅Vn-1(s)=Gn(s)⋅Gn-1(s)⋅…⋅G2(s)⋅G1(s)⋅V1(s) Zatem:
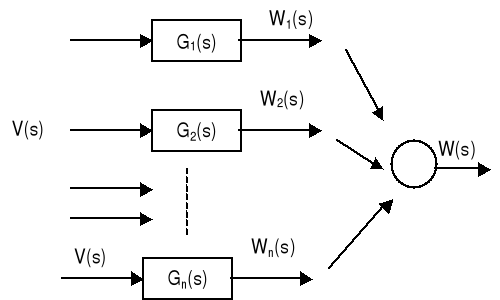
Transmitancja równoległa
W1(s)=G1(s)⋅V1(s) W2(s)=G2(s)⋅V2(s) Ogólnie: Wn(s)=Gn(s)⋅Vn(s) Czyli:
transmitancja wypadkowa wynosi:
Wymień zalety i wady układów regulacji z regulatorami P, PI. - Trzeba wyszczególnić obiekt wyszczególnić regulator, pokazać węzeł sumacyjny, gdzie wyjście obiektu porównuje się z wartością zadaną i że to co wychodzi to jest epsilon, że ten epsilon wchodzi na regulator, z regulatora do U sterowanie. Opisać te sygnały sterowanie, wyjście obiektu, wartość zadana, układ regulacji i transmitancji. Transmitancja układu zamkniętego to jest Y/G* Transmitancja uchybowa to jest Y/Epsilon. To one opisują własności układu jako całości tzn, że mieści się tam i obiekt i regulator i taki układ trzeba analizować jako całość. Nie można oddzielić obiektu od regulatora, bo one pracują wspólnie i wspólnie mają dopiero te własności dynamiczne, własności typu statycznego lub astatycznego, własności typu stabilność albo jej brak. W regulatorze Pi mamy do czynienia z przebiegami oscylacyjnymi, które długo dosyć wpływają, dużo dłużej niż z regulatorem typu P, ale w stanie ustalonym jak się popatrzy na tą funkcję układ osiągnie dokładnie wartość zadaną. Kosztem długiego czasu ustalania się stanu (kosztem oscylacji) osiągamy dokładnie to co sobie życzymy. W regulatorze P osiąga się szybko wartość zdaną, ale mniej dokładnie. Pi - wolne ale o charakterze astatycznym sprowadzającym uchyb do zera i w efekcie Regulator P (proporcjonalny) - wady: występująca przy praktycznej realizacii wzmacniacza, nieliniowość jego charakterystyk(zniekształca) wrażliwość na zmiany niektórych parametrów powoduje, żę współczynnik wzmocnienia nie jest stały, i może przybierać wartości zawatre w szerokich granicach(aby go zniwelowa: duże wzmocnienie) Zalety: Jego sygnał wyjściowy jest proporcjonalny do wejściowego dość szybki Regulator PI (proporcjonalno - całkujący) wady - brak; zalety: można wykorzystać do regulacji statycznej i astatycznej. Szybko reaguje na zmiany warunków pracy uchyb może zostać zlikwidowane przez odpowiednie PI
Pytanie 24:
wady - brak wymienionych zalety:
Regulator PID (proporcjonalno, całkująco - różniczkujący) wady - może wystąpić interakcja (wzajemne zależności nastawu poszczególnych wielkości) gdy stała czasowa inercji regulatora T=0 układ NIE !!!!!!! do fizycznej realizacji. Zalety: -większa skuteczność ->zapewnia mały uchyb regulacji w zakresie małych częstotliwości i zerowy uchyb w stanie ustalonym oraz leprzą stabilność układu przy szerszym zakresie skutecznego działania i szybszej reakcji na zakłócenia.
Wyznacz algorytm identyfikacji przy kwadratowym kryterium jakości dla modelu y = a * u. Jest obiekt i on ma swoje wyjście, ma swoje wejście i ja dysponuje takimi parami pomiarowymi no i teraz chce wyznaczyć charakterystykę statyczną która łączy wielkość wyjściową z wejściową ( w stanach ustalonych). Ponieważ nie znam rzeczywistej charakterystyki, a dysponuje tymi punktami pomiarowymi to jeżeli ja nie znam tej charakterystyki to ja wprowadzam sobie pewien model czyli zależność, że y to jest I(U) i jakimś parametrem B. Np. model liniowy i teraz poszukuje wśród modeli liniowych czyli wśród tych wszystkich prostych poszukuje takiej prostej, że minimalizuje kryterium jakości identyfikacji. Kryterium jest takie, że suma odległości pomiarów od tej prostej jest najmniejsza. Minimalizacja kryterium i wyprowadzenie wzoru w oparciu o kryterium typu, po zminimalizowaniu. U i y to są liczby bo są dane, to zostanie a. - Y=a*u to wzór modelu jednowymiarowego, czyli takiego, który posiada jedno wejście i jedno wyjście. Poszukujemy najlepszego `a'. Tabela danych pomiarowych tego układu złożona jest z 2 wierszy: u
...
y
...
Korzystam z kryterium kwadratowego dla obiektu:
najlepszą wartość `a', dla której Q(a) osiąga minimum, wyznaczamy przyrównując pochodną funkcji do zera:
Omówić zasadę wyznaczania costam na wektory z zastosowaniem rozłożenia na ułamki proste - Beznadziejnie trudne. - Zaczynamy od przedstawienia metodologi takiej, że odpowiedź układu to jest funkcja wymiany s przez licznik i mianownik. Napisać jakiś wzór ogólny.........................
Dla każdego ułamka prostego znamy odpowiedź w dziedzinie czasu i jest ona prosta, na ogół jest to e -at czy e-st jeżeli s jest liczbą rzeczywistą to mamy do czynienia z przebiegami typu wykładniczego tłumionymi albo wzmacnianymi w zależności od tego czy jest e do + jakiejś liczby czy e- jakiejś liczby. O ile pierwiastki są zespolone, to okazuje się, że z natury rzeczy przy rzeczywistych współczynnikach będą to pary liczb sprzężonych. Jak jest para pierwiastków sprzężonych to na końcu po przekształceniach skrócą się wszystkie zespolone czynniki. Jeżeli pierwiastki są zespolone, to muszą być parami sprzężone bo to wynika z matematyki. Konsekwencją tego jest to, że jak jest para sprzężone, że pojawiają się w układzie przebiegi oscylacyjne tłumione, albo nie.
Przebieg w układzie regulacji - może albo osiągać stan wartości zadanej albo, że nie jest w stanie osiągnąć tej wartości zadanej. Wynika to z tego, że układ traktowany jako całość wraz z regulatorem jest układem statycznym, a więc w stanie ustalonym ma uchyb różny od zera. Co wynika z zależności matematycznych.
Układy astatyczne - W stanie ustalonym mają uchyb równy zeru. Układ astatyczny 1-go rzędu potrafi wartość skoku jednostkowego wprowadzić uchyb ustalony do zera, podajemy przykład
|



![]()
Wyszukiwarka