|
POLITECHNIKA WROCŁAWSKA
|
Łukasz Staśkiewicz
|
Wydział: Elektryczny Termin: Wtorek Godz. 1115-1245
|
|
|
|
|
Data ćw: 17.04.2012 |
|
Prowadzący:
Mgr inż. Paweł Ewert |
Systemy monitorowania i diagnostyki w przemyśle |
|||
|
SPRAWOZDANIE TEMAT: Zastosowanie metody analizy wektora przestrzennego prądów stojana do wykrywania uszkodzeń w silnikach indukcyjnych |
Ocena:
|
||
Cel ćwiczenia.
Celem ćwiczenia jest wykorzystanie metody analizy częstotliwościowej wektora przestrzennego prądu do wykrycia uszkodzeń silnika indukcyjnego, pokazanie charakterystycznych częstotliwości w widmie modułu wektora przestrzennego prądu silnika zdrowego oraz uszkodzonego.
Przebieg ćwiczenia
Silnik zdrowy
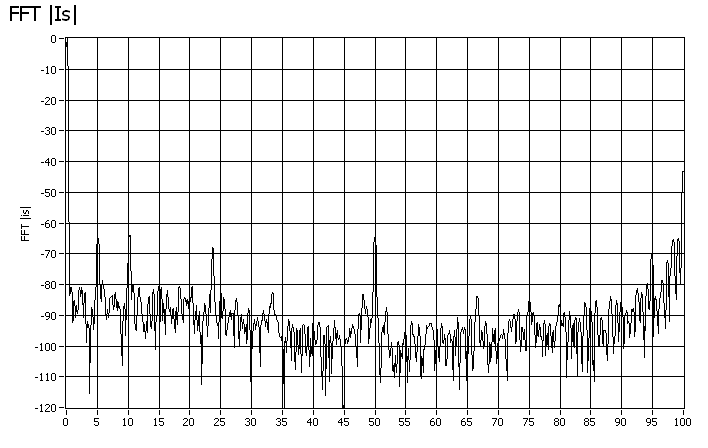
Rys. 1 Widmo modułu wektora przestrzennego prądu stojana |is| silnika zdrowego dla częstotliwości zasilania fs=50Hz
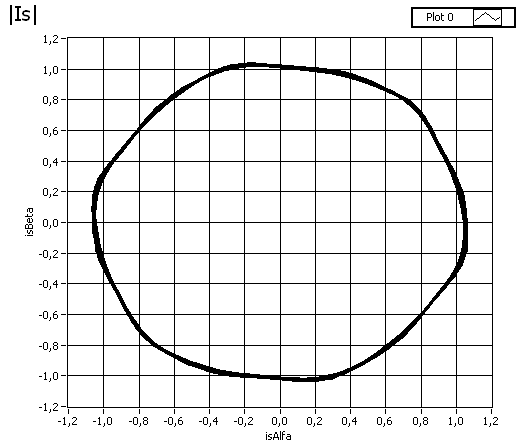
Rys. 2 hodograf silnika zdrowego
silnik uszkodzony
uszkodzony 1 pręt
Rys.3a
Rys. 3b
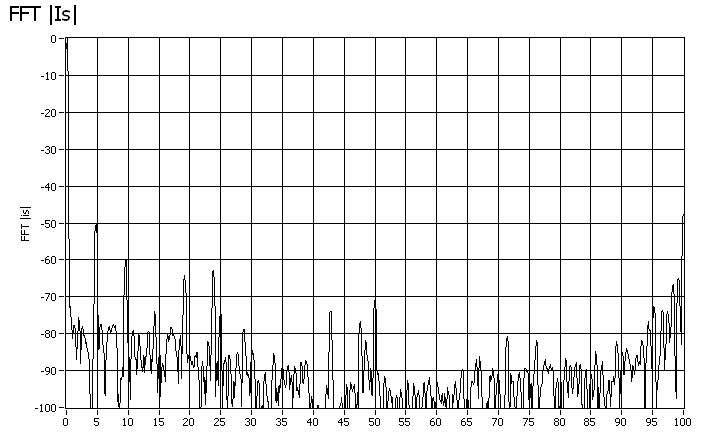
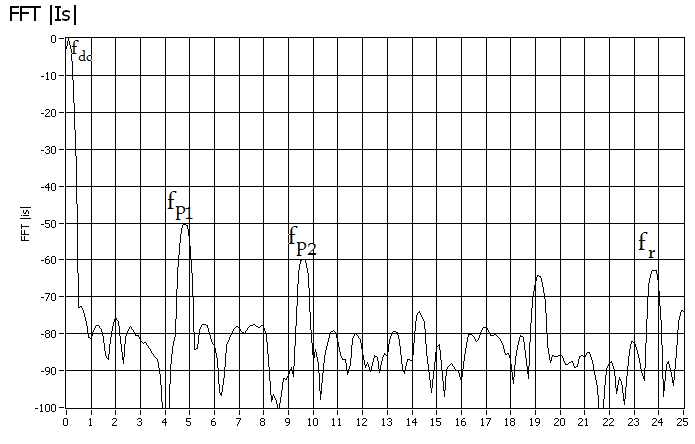
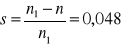
Rys. 3 a) Widmo modułu wektora przestrzennego prądu stojana |is| silnika z uszkodzonym jednym prętem dla częstotliwości zasilania fs=50Hz b) widmo przybliżone
częstotliwość poślizgowa
częstotliwość sieciowa
harmoniczna rotacyjna(obrotowa)
![]()
![]()
prędkość
poślizg
uszkodzone 2 pręty
Rys. 4a
Rys. 4b
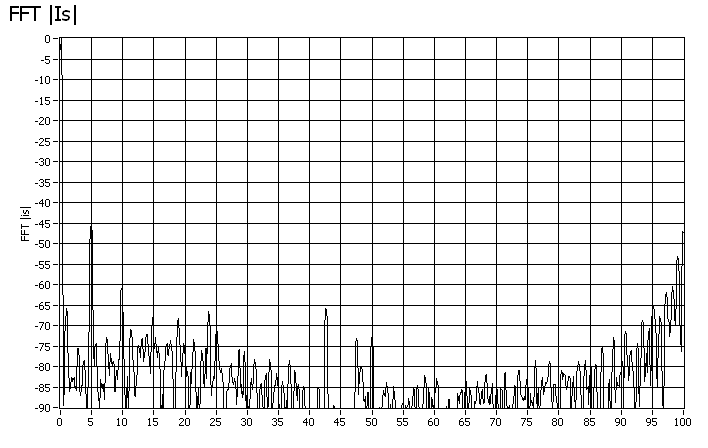
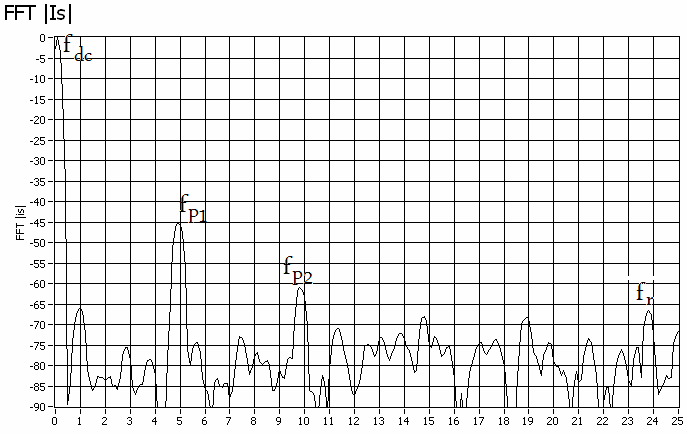
Rys. 4 a) Widmo modułu wektora przestrzennego prądu stojana |is|silnika z uszkodzonymi dwoma prętami dla częstotliwości zasilania fs=50Hz b) widmo przybliżone
Rys.5 hodograf silnika uszkodzonego najbardziej- uszkodzone 2 pręty
Wyniki:
|
prędkość n |
poślizg s |
fp |
A [dB] |
zdrowy |
1425obr/min |
0,05 |
fp1 |
-65 |
|
|
|
fp2 |
-64 |
uszkodzony-1 pręt |
1428obr/min |
0,048 |
fp1 |
-50 |
|
|
|
fp2 |
-60 |
uszkodzony- 2 pręty |
1431obr/min |
0,045 |
fp1 |
-45 |
|
|
|
fp2 |
-61 |
Wnioski:
Celem ćwiczenia była diagnoza uszkodzeń silnika indukcyjnego obciążonego prądem o wartości 5A. Zbadaliśmy trzy silniki- jeden zdrowy oraz dwa uszkodzone. Uszkodzenie silników polegało na przerwaniu prętów klatki. Prędkość znamionowa silnika wynosiła 1500obr/min. Badając częstotliwość obrotową silnika zdrowego i uszkodzonych obliczyć można ich prędkość. Poślizg silnika zdrowego wynosi 0,05, silnika z jednym prętem uszkodzonym 0,048, a przy dwóch uszkodzonych prętach 0,045. Różnice te nie są duże, prędkość obrotowa zwiększała się wraz ze wzrostem liczby uszkodzonych prętów, dlatego można powiedzieć, że silnik miał tendencje do przyspieszania.
Analizując widmo wektora przestrzennego prądu zauważyć można charakterystyczne częstotliwości- składową podstawową fdc, harmoniczną obrotową fr oraz częstotliwości poślizgowe fp. W silniku zdrowym częstotliwości poślizgowe były prawie takie same, natomiast im więcej prętów uszkodzonych tym większa różnica między tymi częstotliwościami. Na wykresie pokazana jest zależność częstotliwości poślizgowych od liczby uszkodzonych prętów.
![]()
![]()
Wyszukiwarka
Podobne podstrony:
wektor przestrzenny- syst.mon i diagn, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i dia
Instrukcja drgania 1, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Mate
!!! Zagadnienia, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracowan
Pytanie nr 9, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracowane z
zag 1 i 5, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracowane zaga
Laboratorium Diagnostyki, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem,
DIAGNOSTYKA, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem
PODSTA~1, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracowane zagad
stopa, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracowane zagadnie
Pytanie nr 4, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracowane z
DIAGNOSTYKA pyt 5, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opracow
diagnostyka wszystko, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Opra
instrukcja drgania 2, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w przem, Mate
analogowe sprawko cw B, Automatyka i robotyka air pwr, VI SEMESTR, Analogowe i cyfr. syst. pom
Metody sprawko calka, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
sprawko cw3, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, teoria automatow
gauss sprawko, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
metody sprawko2, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
metody sprawko4, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
więcej podobnych podstron