e-Fizyka - internetowy wykład z podstaw fizyki
(prof. Zbigniew Kąkol, dr Jan Żukrowski)
7.3 Energia kinetyczna
Rozpatrzmy jeszcze raz ruch ciała pod wpływem stałej, niezrównoważonej siły F i obliczmy pracę jaką wykonuje ona na drodze s. Stałość siły oznacza, że ruch odbywa się ze stałym przyspieszeniem a. Zakładamy ponadto, że kierunek siły F i przyspieszenia a pokrywa się z kierunkiem przesunięcia s. Dla ruchu jednostajnie przyspieszonego możemy napisać
|
(7.6a) |
|
(7.6b) |
co w połączeniu daje
|
(7.7) |
Wykonana praca jest równa
|
(7.8) |
|
Definicja |
|
(7.9) |
Na podstawie wzorów (7.8) i (7.9) widzimy, że
|
Prawo, zasada, twierdzenie |
|
(7.10) |
To jest twierdzenie o pracy i energii
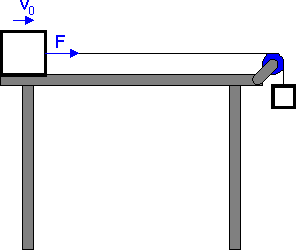
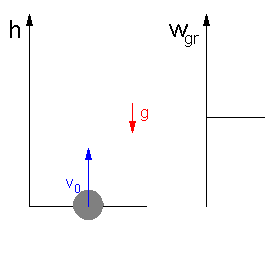
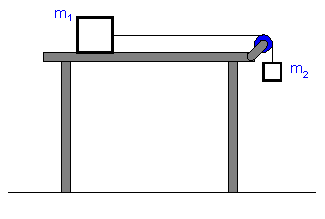
Przykład jest pokazany na rysunku poniżej (animacja). Stała siła F z jaką ciągnięty jest po gładkim stole klocek wykonuje pracę W i dzięki temu rośnie energia kinetyczna klocka (zwróć uwagę, że rośnie jego prędkość v).
Kliknij w dowolnym miejscu na rysunku żeby uruchomić animację. Ponowne kliknięcie oznacza powrót do początku.
(jeżeli używasz przeglądarki Netscape to ponowne uruchomienie tej animacji wymaga wyczyszczenia Memory Cache przeglądarki lub ustawienia jej rozmiaru na zero)
Z twierdzenia o pracy i energii wynika, że jednostki pracy i energii są takie same.
|
Jednostki |
Spróbuj teraz wykonać proste ćwiczenie.
|
7.4 Moc
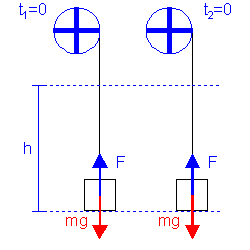
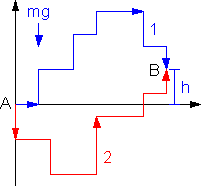
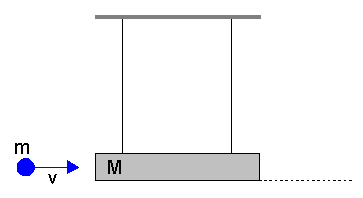
Z punktu widzenia zastosowań praktycznych często istotnym jest nie to ile energii można uzyskać ze źródła ale to jak szybko można ją uzyskać (zamienić w użyteczną postać). Na przykład, ważnym parametrem samochodu, istotnym przy wyprzedzaniu, jest to jak szybko samochód przyspiesza tzn. jak szybko silnik wykonuje pracę związaną z rozpędzaniem samochodu. Inny przykład to, gdy chcemy zlecić komuś pracę do wykonania. Bierzemy wtedy pod uwagę nie tylko koszty ale i czas wykonania zlecenia (pracy). Na rysunku poniżej pokazane są dwa dźwigi, które podnoszą jednakowe masy na jednakową wysokość h. Tak jak zostało to już pokazane na wcześniejszym przykładzie, każdy z dźwigów wykonuje taką samą pracę równą mgh. Jeżeli jednak uruchomisz animację to zobaczysz, że jeden z dźwigów wykonuje tę pracę w czasie o połowę krótszym niż drugi. Mówimy, że ten dźwig ma większą moc
niż drugi.
Kliknij w dowolnym miejscu na rysunku żeby uruchomić animację. Ponowne kliknięcie oznacza powrót do początku.
(jeżeli używasz przeglądarki Netscape to ponowne uruchomienie tej animacji wymaga wyczyszczenia Memory Cache przeglądarki lub ustawienia jej rozmiaru na zero)
|
Definicja |
Jeżeli praca W została wykonana w czasie t to średnia moc
jest dana wzorem
|
(7.11a) |
Dla stałej siły F wzór ten przyjmuje postać
|
(7.11b) |
Powróćmy jeszcze raz do przykładu pokazanego na rysunku 7.6. Widzimy, że prędkość podnoszenia masy przez pierwszy dźwig jest dwukrotnie większa, więc na podstawie wzoru (7.11b) moc tego dźwigu jest też dwukrotnie większa niż dźwigu drugiego.
Dla czasu t → 0 mówimy o mocy chwilowej
|
(7.12) |
Moc chwilową obliczamy jako pochodną pracy względem czasu.
|
Jednostki |
|
8.2 Energia potencjalna
Gdy rozpatrywaliśmy (w poprzednim rozdziale) ruch ciała pod wpływem siły grawitacji lub siły sprężystości widzieliśmy, że energia kinetyczna poruszającego się ciała zmieniała się (malała i rosła) podczas ruchu, tak że w cyklu zamkniętym powracała do początkowej wartości. W tej sytuacji, gdy działają siły zachowawcze, do opisania tych zmian celowe jest wprowadzenie pojęcia energii potencjalnej
Ep. Mówimy, że zmianie energii kinetycznej ciała o wartość ΔEk towarzyszy zmiana energii potencjalnej ΔEp tego ciała równa co do wartości ale przeciwnego znaku, tak że suma tych zmian jest równa zeru
|
(8.6) |
Każda zmiana energii kinetycznej ciała Ek jest równoważona przez zmianę energii potencjalnej Ep, tak że ich suma pozostaje przez cały czas stała
|
(8.7) |
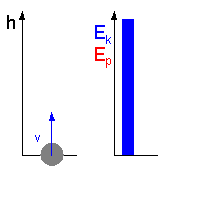
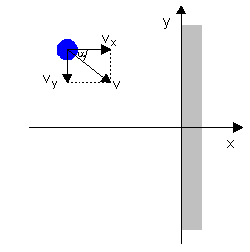
Możesz prześledzić zmiany energii w rzucie ukośnym uruchamiając animację poniżej
Kliknij w dowolnym miejscu na rysunku żeby uruchomić animację. Ponowne kliknięcie oznacza powrót do początku.
Energię potencjalną można traktować jako energię nagromadzoną, która może być w przyszłości całkowicie odzyskana i zamieniona na inną użyteczną formę energii. Oznacza to, że nie możemy wiązać energii potencjalnej z siłą niezachowawczą. Energię potencjalną często nazywa się energią stanu
. Mówimy, że jeżeli energia układu zmieniła się to zmienił się stan układu.
|
(8.8) |
więc zgodnie z wprowadzonym pojęciem energii potencjalnej, dla zachowawczej siły F, zachodzi związek
|
(8.9) |
|
(8.10) |
Możemy również zapisać zależność odwrotną między siłą i energią potencjalną
|
(8.11) |
Zauważmy, że na podstawie równania (8.10) potrafimy obliczyć zmianę energii potencjalnej ΔEp, a nie samą energię potencjalną Ep. Ponieważ ΔEp = Ep(r) - Ep(r0), to żeby znaleźć Ep(r) trzeba nie tylko znać siłę ale jeszcze wartość Ep(r0)
|
(8.12) |
Punkt r0 nazywamy punktem odniesienia i zazwyczaj wybieramy go tak, żeby energia potencjalna w tym punkcie odniesienia Ep(r0) była równa zeru. Jako punkt odniesienia r0 często wybiera się położenie, w którym siła działająca na ciało jest równa zeru. Trzeba jednak podkreślić, że wybór punktu odniesienia jest sprawą czysto umowną.
Przykład |
|
|
(8.13) |
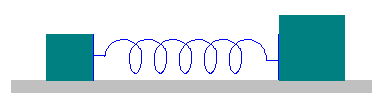
W analogiczny sposób obliczymy teraz energię potencjalną idealnej nieważkiej sprężyny. Gdy sprężyna jest rozciągnięta na odległość x od położenia równowagi to siła sprężystości wynosi F = - kx. Jako punkt odniesienia przyjmujemy tym razem x0 = 0. Odpowiada to położeniu równowagi, w którym sprężyna jest nierozciągnięta i siła sprężystości jest równa zeru. Energię potencjalną ponownie obliczamy z równania (8.12) przy czym korzystamy z podanego wyrażenia (7.5) na pracę wykonaną przy rozciąganiu sprężyny
|
(8.14) |
Spróbuj teraz, korzystając z definicji energii potencjalnej, wykonać następujące ćwiczenie
Energia potencjalna i potencjał pola grawitacyjnego
W przykładzie powyżej obliczyliśmy energię potencjalną związaną z siłą grawitacyjną w pobliżu powierzchni Ziemi, gdzie przyjmowaliśmy, że siła grawitacji jest stała. Teraz zajmiemy się zagadnieniem bardziej ogólnym i znajdziemy energię potencjalną masy m znajdującej się w dowolnym punkcie nad powierzchnią Ziemi odległym o r od środka Ziemi.
Gdy obliczaliśmy grawitacyjną energię potencjalną w pobliżu powierzchni Ziemi (przykład powyżej) właśnie powierzchnię Ziemi przyjmowaliśmy jako punkt odniesienia. Natomiast dla ogólnych obliczeń punkt odniesienia wybiera się w nieskończoności. Temu położeniu (r → ∞) przypisujemy zerową energię potencjalną. Zwróćmy uwagę, że stan zerowej energii jest również stanem zerowej siły.
Przypomnijmy, że dla sił zachowawczych zmianę energii potencjalnej ciała przy przejściu z położenia (lub ogólniej ze stanu) A do B możemy zapisać jako
|
(8.15) |
Siła grawitacji jest siłą zachowawczą więc dla tak wybranego punktu odniesienia
|
(8.16) |
Praca wykonywaną przez siłę grawitacji przy przenoszeniu masy m z punktu odległego o r od środka Ziemi do nieskończoności wynosi
|
(8.17) |
Znak minus wskazuje kierunek działania siły grawitacji (przeciwny do przesunięcia).
Ponieważ energia potencjalna ma wartość równą zeru w nieskończoności (punkt odniesienia) więc grawitacyjna energia potencjalna w odległości r od środka Ziemi (od środka dowolnej masy M) wynosi
|
(8.18) |
Energia potencjalna ma wartość równą zeru w nieskończoności (punkt odniesienia) i maleje w miarę zmniejszania się r. Oznacza to, że siła jest przyciągająca. Wzór ten jest prawdziwy bez względu na wybór drogi po jakiej punkt porusza się z nieskończoności do r bo siła grawitacji jest siłą zachowawczą.
Widzimy, że z polem siły grawitacji wiąże się przestrzenny rozkład energii E(r) dany równaniem (8.17).
Omawiając w punkcie (6.4) pole grawitacyjne przedstawialiśmy siłę działającą na umieszczony w tym polu obiekt jako iloczyn natężenia pola i masy tego obiektu. Stwierdziliśmy, że jedna masa wytwarza pole, a następnie to pole działa na drugą masę. Inaczej mówiąc rozdzieliliśmy siłę na dwie części i w ten sposób uniezależniliśmy nasz opis od masy obiektu wprowadzanego do pola. Podobnie możemy postąpić z energią potencjalną. Zauważmy, że zgodnie z wyrażeniem (8.17) możemy ją przedstawić jako iloczyn masy m i pewnej funkcji V(r)
|
(8.19) |
|
Definicja |
|
(8.20) |
Jak już wspominaliśmy z pojęcia pola korzysta się nie tylko w związku z grawitacją. Przy opisie zjawisk elektrycznych również będziemy się posługiwali pojęciem pola (elektrycznego), jego natężenia i potencjału.
Jeżeli obiektowi nadamy na powierzchni Ziemi odpowiednio dużą prędkość początkową to zacznie on okrążać Ziemię i nie spadnie na jej powierzchnię. Tę graniczną prędkość nazywamy pierwszą prędkością kosmiczną
. Jest to najmniejsza prędkość jaką musi mieć punkt materialny swobodnie krążący po orbicie wokół Ziemi. Na tak poruszający się obiekt działają dwie siły; siła grawitacji i siła odśrodkowa. Siły te mają przeciwne zwroty i dla stabilnej orbity równoważą się
|
(8.21) |
skąd obliczamy
|
(8.22) |
Jeżeli na powierzchni Ziemi dostarczymy ciału jeszcze większej energii kinetycznej to wtedy może ono bezpowrotnie uciec z Ziemi w przestrzeń kosmiczną. Prędkość początkową (tzw. prędkość ucieczki), przy której ciało ucieknie z powierzchni Ziemi do nieskończoności znajdujemy analogicznie jak w ćwiczeniu powyżej wstawiając h → ∞. Prędkość ta nosi nazwę drugiej prędkości kosmicznej
i wynosi
|
(8.23) |
Zauważmy, że w trakcie oddalania się ciała do nieskończoności (R → ∞) jego energia potencjalna rośnie do zera (jest ujemna) kosztem energii kinetycznej, która maleje do zera (jest dodatnia).
W naszych obliczeniach pominęliśmy inne siły, takie jak siły grawitacyjne wywierane przez Księżyc czy Słońce.
8.3 Zasada zachowania energii
Pokazaliśmy, że gdy na ciało działa tylko siła zachowawcza to dla dowolnej drogi z A do B
|
(8.24) |
oraz
|
(8.25) |
skąd wynika, że
|
(8.26) |
lub
|
(8.27) |
Równanie (8.24) wyraża zasadę zachowania energii mechanicznej.
|
Prawo, zasada, twierdzenie |
Podaliśmy zasadę zachowania energii mechanicznej dla pojedynczego ciała, ale ta zasada jest bardziej ogólna i obowiązuje dla wszystkich odosobnionych układów ciał
. Układy odosobnione to takie, na które nie działają siły zewnętrzne (spoza układu). W takich układach suma energii kinetycznych i potencjalnych wszystkich ciał pozostaje stała bez względu na oddziaływania w nich zachodzące.
Przykład
Natomiast energia całkowita układu w punkcie B
|
|
Ponieważ siły grawitacji i sprężystości są siłami zachowawczymi więc energia mechaniczna jest zachowana. Uwzględniając, że energia kinetyczna skoczka w punktach A i B jest równa zeru otrzymujemy
lub
Wstawiając do tego równania maksymalne możliwe wydłużenie liny x = 0.5l możemy obliczyć graniczny współczynnik k liny
skąd otrzymujemy
Wytrzymałość liny na zerwanie musi być co najmniej 6 razy większa niż ciężar skoczka.
Teraz spróbujemy odpowiedzieć na pytanie czy energia jest zachowana w przypadku gdy w układzie działa siła niezachowawcza.
Jeżeli oprócz siły zachowawczej Fz działa jeszcze siła niezachowawcza Fnz (np. tarcie) to z twierdzenia o pracy i energii otrzymujemy
|
(8.28) |
a ponieważ Wz =
ΔEp to
|
(8.29) |
Widzimy, że siła tarcia zmienia energię mechaniczną układu (zmniejsza ją bo tarcie jest siłą rozpraszającą). Pozostaje wyjaśnić co stało się ze "straconą" energią mechaniczną. Okazuje się, że zostaje ona przekształcona na energię wewnętrzną U
, która objawia się wzrostem temperatury ciała i otoczenia. Zmiana energii wewnętrznej ΔU jest równa rozproszonej energii mechanicznej
|
(8.30) |
|
Prawo, zasada, twierdzenie |
Na zakończenie uwzględnijmy jeszcze dodatkowo siłę Fzew wywieraną na układ przez czynnik zewnętrzny. Jeżeli działa taka siła to równanie (8.28) przyjmuje postać
|
(8.31) |
i w konsekwencji otrzymujemy
|
(8.32) |
Praca wykonana przez czynnik zewnętrzny równa jest sumie zmian energii kinetycznej, potencjalnej i energii wewnętrznej układu. W ten sposób uwzględniliśmy już całą energię.
Zasada zachowania energii należy do najbardziej podstawowych praw fizyki. Wszystkie nasze doświadczenia pokazują, że jest to prawo bezwzględnie obowiązujące; nie znamy wyjątków od tego prawa.
|
Jak widzieliśmy na przykładzie omawianym ćwiczeniu powyżej, w zderzeniach nie musi być zachowana energia mechaniczna. Okazuje się jednak, że w zderzeniach spełniona jest inna zasada zachowania; zasada zachowania pędu.
9. Zasada zachowania pędu
9.1 Środek masy
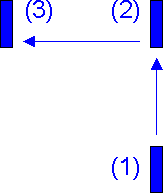
Dotychczas przedmioty traktowaliśmy jak punkty materialne, tzn. obdarzone masą cząstki bezwymiarowe (o zerowej objętości) co wystarczało w przypadku ruchu postępowego ciał bo ruch jednego punktu odzwierciedlał ruch całego ciała. Jednak rzeczywiste ciała są układami ogromnej liczby atomów, a ich ruch może być bardzo skomplikowany. Ciało może wirować lub drgać, w trakcie ruchu cząstki mogą zmieniać swoje wzajemne położenie. Przykład takiego ruchu jest przedstawiony na rysunku-animacji poniżej.
Kliknij w dowolnym miejscu na rysunku żeby uruchomić animację. Ponowne kliknięcie oznacza powrót do początku.
(jeżeli używasz przeglądarki Netscape to ponowne uruchomienie tej animacji wymaga wyczyszczenia Memory Cache przeglądarki lub ustawienia jej rozmiaru na zero)
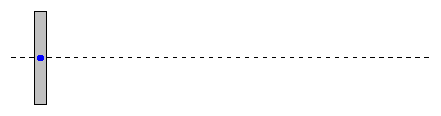
Rys. 9.1. Ciało wykonuje skomplikowany ruch obrotowy za wyjątkiem jednego punktu,
który porusza się po linii prostej
Zauważmy, że istnieje w tym układzie jeden punkt, który porusza się po linii prostej ze stałą prędkością. Żaden inny punkt nie porusza się w ten sposób. Ten punkt to środek masy
.
Sposób wyznaczania środka masy zilustrujemy następującym przykładem
Przykład
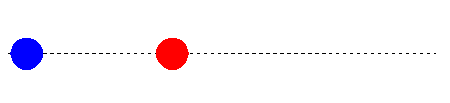
Rozważamy układ dwóch różnych mas m1 i m2 pokazanych na rysunku 9.2.
Rys. 9.2. Środek masy układu dwóch mas m1 i m2
Położenie środka masy tego układu definiujemy jako
|
(9.1) |
lub
|
(9.2) |
Widzimy, że położenie środka masy układu punktów materialnych wyznaczamy jak średnią ważoną, przy czym masa tych punktów jest czynnikiem ważącym przy tworzeniu średniej.
Przez analogię dla układu n cząstek (punktów materialnych) współrzędna x środka masy jest dana zależnością
|
(9.3) |
gdzie suma mas mi poszczególnych punktów układu jest całkowitą masą M układu.
Postępując w ten sam sposób możemy wyznaczyć pozostałe współrzędne y, z. W wyniku otrzymujemy trzy równania skalarne (analogiczne do 9.3), które możemy zastąpić jednym równaniem wektorowym
|
(9.4) |
Zauważmy, że środek masy układu punktów materialnych zależy tylko od mas tych punktów i od wzajemnego ich rozmieszczenia, a nie zależy od wyboru układu odniesienia.
Dla ciał o regularnym kształcie środek masy pokrywa się ze środkiem geometrycznym.
Przedyskutujmy teraz fizyczne znaczenie środka masy.
Wyszukiwarka