Identyfikacja obiektów dynamicznych
1. Wprowadzenie
Proces automatycznej regulacji jest procesem dynamicznym, tzn. istotne są zmiany sygnałów w czasie. Z tego względu analizowanie układów automatycznej regulacji wymaga znajomości modeli dynamicznych obiektów tworzących te układy. Na ogół modele te nie są dane a priori, lecz konieczne jest ich wyznaczenie.
Postępowanie zmierzające do wyznaczenia nieznanego modelu obiektu (zarówno postaci tego modelu jak i wartości jego parametrów) nazywa się identyfikacją. Możliwe są dwa sposoby postępowania: badanie zjawisk fizycznych zachodzących w obiekcie prowadzące do tzw. modelu "poznawczego", bądź też badanie sygnałów wejściowych i wyjściowych prowadzące do modelu "wejściowo-wyjściowego". Drugi z wymienionych sposobów, mający większe znaczenie praktyczne, jest wykorzystywany w ćwiczeniu.
Opracowanych zostało wiele metod identyfikacji, umożliwiających określenie zarówno postaci modelu matematycznego, jak i wartości jego parametrów dla statycznych oraz dynamicznych modeli obiektów. Przedmiotem tego ćwiczenia jest poznanie prostych metod identyfikacji wybranej klasy jednowymiarowych liniowych modeli obiektów dynamicznych - obiektów pierwszego i drugiego rzędu. Takie modele opisują wiele obiektów rzeczywistych z dokładnością wystarczającą do celów praktycznych.
2. Podstawowe modele obiektów dynamicznych
2.1. Postać ogólna modelu dynamicznego
Obiekty dynamiczne będące jednowejściowymi i jednowyjściowymi układami liniowymi o parametrach skupionych i niezależnych od czasu opisuje się za pomocą liniowych równań różniczkowych o stałych współczynnikach, które to równania ujmują przemiany energetyczne zachodzące w analizowanym obiekcie. Ogólna postać tych równań jest następująca:
(1)
gdzie przez x(t) oznaczono wielkość wejściową, a przez y(t) wielkość wyjściową.
Współczynniki ai i bj w równaniu (l) są zazwyczaj prostymi funkcjami wielkości charakteryzujących elementy tworzące obiekt, jak np. rezystancja, pojemność, indukcyjność, masa, ciepło właściwe, wymiary geometryczne itp., a jednocześnie nie są zależne od wartości sygnałów występujących w układzie ani od czasu.
Związek pomiędzy wielkościami wejściową i wyjściową może być również podany w dziedzinie operatorowej, poprzez dokonanie transformacji Laplace'a dla obu tych wielkości. Iloraz transformat tych wielkości nazwany jest transmitancją operatorową. Na podstawie równania (1) transmitancję można wyrazić zależnością:
(2)
Jeżeli wielkości wejściowa i wyjściowa są sygnałami harmonicznymi (sinusoidalnie zmiennymi), to dla stanu ustalonego można obiekt analizować posługując się tzw. transmitancją widmową:
(3)
Transmitancja widmowa jest zatem zespoloną funkcją pulsacji ω. Moduł |K(jω)| tej funkcji, równy stosunkowi amplitud sygnału wyjściowego (odpowiedzi obiektu) i sygnału wejściowego (wymuszenia) i nazywa się charakterystyką częstotliwościową amplitudową (modułowa), a argument ϕ(ω) określający przesunięcie fazowe pomiędzy odpowiedzią i wymuszeniem nazywa się charakterystyką częstotliwościową fazową. Charakterystyki amplitudową i fazową przedstawia się również jako charakterystyki logarytmiczne Bodego (w logarytmicznej skali częstotliwości):
![]()
(4)
2.2. Model obiektu inercyjnego pierwszego rzędu
Obiekt inercyjny pierwszego rzędu opisany jest równaniem różniczkowym pierwszego rzędu o postaci:
![]()
lub ![]()
(5)
gdzie: k=b0/a0 jest nazywany współczynnikiem wzmocnienia statycznego, T= a1/a0 jest nazywany stałą czasową, a τ jest czasem opóźnienia.
Transmitancja operatorowa ma postać:
![]()
(6)
a charakterystyki częstotliwościowe:

(7)
Odpowiedzi obiektu inercyjnego pierwszego rzędu na skokową i impulsową zmianę wielkości wejściowej mają odpowiednio postać:
x(t)=A1(t) ⇒ ![]()
(8)
x(t) = Aδ(t) ⇒ ![]()
(9)
Charakterystyki częstotliwościowe obiektu inercyjnego pierwszego rzędu bez opóźnienia (τ=0)![]()
pokazano na rysunku 1, a odpowiedzi skokową i impulsową na rysunku 2.
2.3. Model obiektu drugiego rzędu
Obiekt drugiego rzędu opisany jest równaniem różniczkowym drugiego rzędu o postaci ogólnej:
![]()
(10)
W zależności od wartości współczynników modelu obiekt drugiego rzędu ma charakter inercyjny lub oscylacyjny. Równanie modelu (10) można również zapisać w następującej postaci:
![]()
(11)
gdzie k=b0/a0 jest współczynnikiem wzmocnienia statycznego,
![]()
jest pulsacją drgań własnych nietłumionych, a

jest stopniem (współczynnikiem) tłumienia
Obiekt ma charakter oscylacyjny dla współczynników tłumienia 0≤ξ<1 lub inercyjny dla ξ≥1.
Transmitancja operatorowa dla obiektu oscylacyjnego z opóźnieniem ma postać
(12)
a dla obiektu inercyjnego ma postać
![]()
(13)
gdzie T1 i T2 są stałymi czasowymi. Zachodzą związki: k=b0/a0, a2/a0=T1T2, a1/a0=T1+T2.
Dla przypadku granicznego przy tłumieniu ξ=1 stałe czasowe są sobie równe T1=T2
Charakterystyki częstotliwościowe dla przypadku oscylacyjnego bez opóźnienia (τ = 0) opisane są zależnościami:
(14)
Odpowiedź skokowa ma w tym przypadku postać:
x(t)=A1(t) ⇒ 
(15)
gdzie ![]()
jest pulsacją tego przebiegu (pulsacją drgań tłumionych, ξ≠0).
![]()
.
Unormowane logarytmiczne charakterystyki częstotliwościowe obiektu oscylacyjnego pokazano na rysunku 3, a odpowiedź skokową na rysunku 4.
Logarytmiczne charakterystyki częstotliwościowe obiektu drugiego rzędu o charakterze inercyjnym bez opóźnienia (τ = 0) opisane są zależnościami

(16)
Na rysunku 5 pokazane są charakterystyczne cechy charakterystyki amplitudowo-częstotliwościowej dla przypadku T1>>T2.
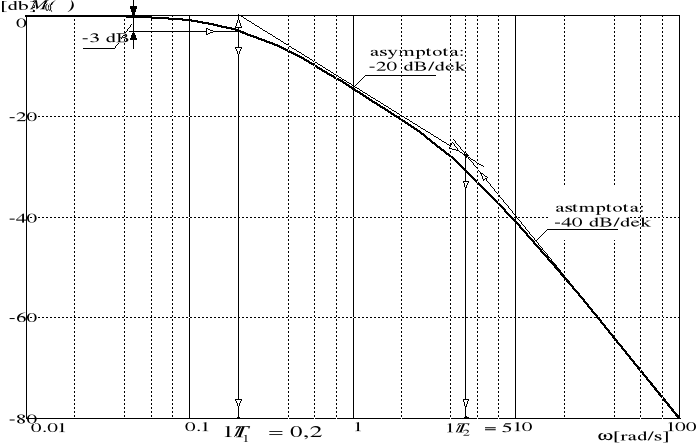
Rys. 5. Charakterystyka amplitudowo-częstotliwościowa dla obiektu inercyjnego 2-go rzędu o stałych czasowych T1=5, T2=0,2 (strzałki wskazują sposób odczytu stałych czasowych).
Odpowiedź skokowa ma w tym przypadku postać:
x(t)=A1(t) ⇒ 
(17)
Przykład odpowiedzi skokowej pokazany jest na rysunku 4 (krzywa T1=5; T2=0,2).
3. Metody identyfikacji modeli dynamicznych
3.1. Eksperyment pomiarowy
Identyfikacja modelu, dokonywana jest na podstawie analizy danych uzyskanych w wyniku eksperymentu polegającego na pobudzeniu wejścia obiektu znanym sygnałem i obserwacji sygnału na wyjściu obiektu. Wśród znanych metod identyfikacji modeli obiektów liniowych ciągłych podstawowe znaczenie mają:
analiza charakterystyk częstotliwościowych
analiza odpowiedzi skokowych lub impulsowych
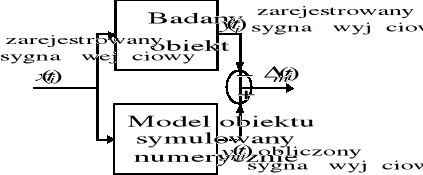
Układ pomiarowy zastosowany w takim eksperymencie powinien zatem umożliwiać rejestrację przebiegu sygnałów wejściowego i wyjściowego w odpowiednio szerokim przedziale czasu lub też pomiarowe wyznaczenie charakterystyk częstitliwościowych. Schematy blokowe odpowiednich układów pokazano na rysunku 6.
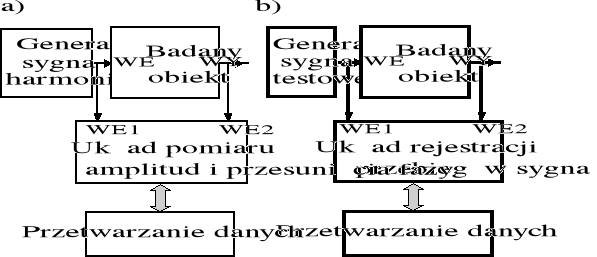
Rys. 6. Układy do pomiarowego wyznaczania charakterystyk częstotliwościowych amplitudowych (a) i do rejestracji odpowiedzi badanego obiektu (b).
3.2. Identyfikacja na podstawie charakterystyk częstotliwościowych.
Podstawą do wyznaczenia modelu obiektu są w tym przypadku charakterystyki częstotliwościowe wyznaczone eksperymentalnie. Można wykorzystać dwie metody:
pomiar charakterystyki punkt po punkcie - poprzez zastosowanie harmonicznego sygnału testowego i bezpośredni pomiar amplitud sygnału wejściowego i wyjściowego oraz ich wzajemnego przesunięcia fazowego dla kolejnych wartości pulsacji ω (układ z rys. 6b),
wykorzystanie przekształcenia Fouriera dla dowolnego sygnału testowego (wejściowego) i odpowiadającego mu sygnału wyjściowego - szczególnie dogodne w sytuacji, gdy trudno jest zrealizować wymuszenie skokowe lub harmoniczne, a następnie określenie charakterystyk częstotliwościowych wg zależności:
![]()
(18)
gdzie operator F{⋅} oznacza przekształcenie Fouriera (realizowane najczęściej w postaci algorytmów FFT) dla zarejestrowanych przebiegów x(t) i y(t).
Wzmocnienie k wyznacza się z warunku: k = |K(jω))| ω→0.
W przypadku modeli obiektów w postaci inercji pierwszego lub drugiego rzędu stałe czasowe określa się na podstawie charakterystyk logarytmicznych w sposób zilustrowany na rysunkach 1 i 5.
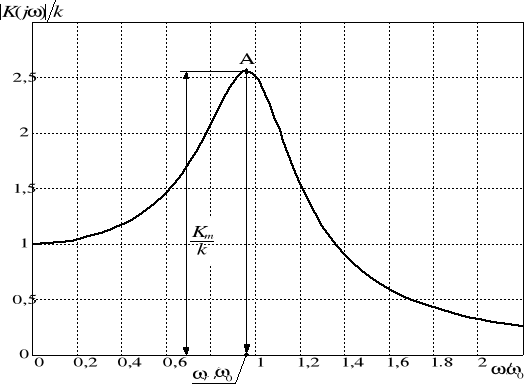
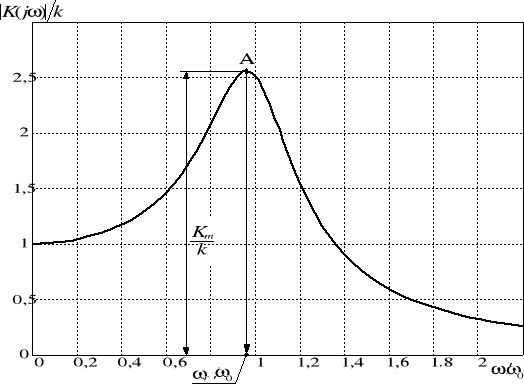
W przypadku modelu oscylacyjnego charakterystyki częstotliwościowe wygodniej jest wykreślić w liniowym układzie współrzędnych, tak jak to pokazano na rysunku 7. Wzmocnienie k wyznacza się tak jak dla obiektu inercyjnego. Współczynnik tłumienia wylicza się przez rozwiązanie zależności:
(19)
a pulsację drgań własnych nietłumionych z zależności:
(20)
gdzie r jest tzw. pulsacją rezonansową (różną od pulsacji drgań własnych w).
Rys. 7. Charakterystyka częstotliwościowa dla obiektu oscylacyjnego o k=1, =0,2 w liniowym układzie współrzędnych
Pokazane na wykresach (rys. 1 i 5) asymptoty o nachyleniu -20dB/dek i -40 dB/dek i pozostałe parametry można wyznaczyć graficznie bądź analitycznie (np. uzyskać metodą regresji liniowej) przy wykorzystaniu danych uzyskanych w trakcie pomiarów. Współrzędne ekstremum charakterystyki częstotliwościowej dla modelu oscylacyjnego (pkt. A, rys. 7) można wyznaczyć poprzez aproksymację wierzchołka np. wielomianem drugiego stopnia.
3.3. Identyfikacja na podstawie odpowiedzi skokowych
Najprostsza, lecz mało dokładna, graficzna metoda wyznaczania parametrów dla modelu w postaci inercji pierwszego rzędu przedstawiona jest w instrukcji pt. “Regulacja z zastosowaniem regulatora PID”.
Opisane poniżej metody pozwalają na wyznaczenie parametrów modelu w sposób analityczny, na podstawie zarejestrowanej odpowiedzi obiektu na sygnał skokowy o znanej amplitudzie A. Układ pomiarowy ma strukturę analogiczną do pokazanej na rysunku 6a. Czas rejestracji powinien być wystarczająco długi, aby odpowiedź obiektu osiągnęła stan bliski ustalonego. W wyniku przeprowadzonej rejestracji uzyskuje się zbiór N wartości wielkości wyjściowej yi=h(ti) (i=0...N). Sposób wyznaczenia parametrów zależy od przyjętej postaci modelu.
Modele inercyjne
Dokonuje się nieliniowego przekształcenia zarejestrowanych wartosci odpowiedzi skokowej h(ti) według poniższej zależności:
(21)
gdzie hust oznacza wartość ustaloną odpowiedzi. Badając przebieg funkcji z(ti) można rozpoznać rząd obiektu. Dla obiektów pierwszego rzędu uzyskuje się linię prostą w całym zakresie (rys. 8a). Rozrzuty punktów wokół prostej wynikają z błędów powstających w układzie pomiarowym. Dla obiektów inercyjnych wyższych rzędów uzyskana krzywa zbliża się asymptotycznie do prostej w sposób zilustrowany na rysunku 8b. O ile kształt uzyskanej krzywej jest zbliżony do pokazanego na rysunku 8c, to obiekt ma charakter oscylacyjny.
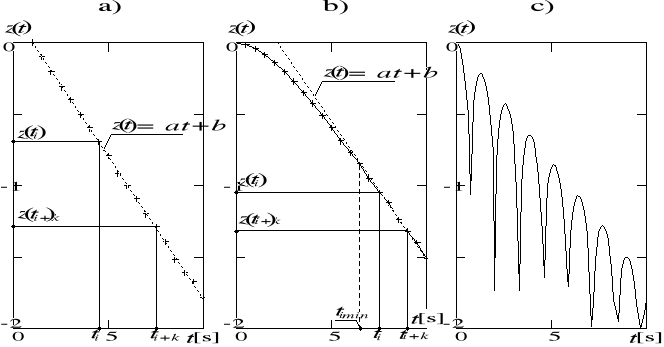
Rys. 8. Wykresy funkcji z(t) dla obiektu inercyjnego 1-go rzędu (a), inercyjnego 2-go rzędu (b) i oscylacyjnego (c).
W dalszej kolejności należy wyznaczyć (np. metodą najmniejszych kwadratów) współczynniki prostej regresji:
![]()
(22)
W przypadku modelu pierwszego rzędu można wykorzystać wszystkie punkty odpowiedzi skokowej (i=0...N). Dla modelu drugiego rzędu poszukiwane jest równanie asymptoty, której współczynniki uzyskuje się wykorzystując jedynie końcowe punkty odpowiedzi skokowej (i=imin...N). Właściwą wartość imin ustala się doświadczalnie, tak, aby uzyskany model był jak najdokładniejszy (patrz punkt 4).
Parametry modelu wyznacza się z następującuch zależności:
wzmocnienie:

(23)
stałą czasową i czas opóźnienia dla modelu w postaci inercji pierwszego rzędu:
![]()
, ![]()
(24)
gdzie i oraz k>i oznaczają numery dwóch dowolnych punktów funkcji z(ti).
stałe czasowe dla modelu w postaci inercji drugiego rzędu:
![]()
, ![]()
(25)
gdzie i>>0 oraz k>i oznaczają numery dwóch dowolnych punktów w końcowym obszarze fukncji z(ti). W tym przypadku wyznaczenie czasu opóżnienia nie jest możliwe.
Model oscylacyjny
W tym przypadku parametry modelu wyznacza się bezpośrednio na podstawie zarejestrowanej odpowiedzi skokowej h(ti). Wzmocnienie, podobnie jak dla modeli inercyjnych, wyznacza się na podstawie wartości odpowiedzi w stanie ustalonym. W celu określenia pozostałych parametrów należy wyznaczyć wartości kolejnych amplitud odpowiedzi oraz okres oscylacji, tak jak to pokazano na rysunku 9. Można wykorzystać wykres odpowiedzi lub metodą analityczną (np. interpolując funkcję h(ti) wokół wierzchołków wielomianem drugiego stopnia) poszukiwać kolejnych ekstremów funkcji h(ti).
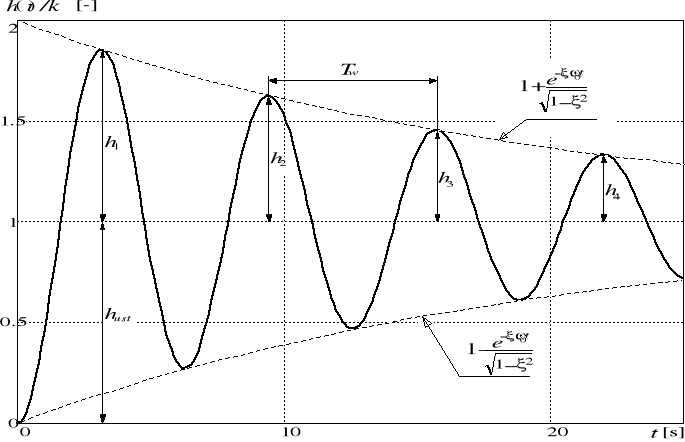
Rys. 9. Wykres fazy przejściowej odpowiedzi skokowej obiektu oscylacyjnego, przy małym współczynniku tłumienia.
Współczynniki modelu wyznacza się z zależności:
, 
(26)
W przypadku, gdy współczynnik tłumienia jest bliski jedności (praktycznie już dla ξ>0.5) oscylacje w przebiegu odpowiedzi skokowej szybko zanikają (patrz rys. 4), co sprawia, że odczyt kolejnych wartości h2, h3 itd. jest bardzo trudny. Współczynnik tłumienia można wówczas wyznaczyć na podstawie znajomości wartości h1 (tzw. przelotu) z zależności przybliżonej:
(22)
4. Przebieg ćwiczenia
Ćwiczenie realizowane jest na stanowisku umożliwiającym cyfrową rejestrację sygnału wejściowego oraz odpowiedzi czasowej badanego obiektu za pomocą oscyloskopu cyfrowego połączonego z komputerem. Rodzaj sygnału wejściowego i jego parametry ustala się za pomocą generatora funkcyjnego. Schemat blokowy układu pokazano na rysunku 10.
Badane są elektryczne modele obiektów pierwszego i drugiego rzędu.

Rys. 10. Schemat blokowy układu pomiarowego wykorzystywanego w ćwiczeniu.
Przetwarzanie danych umożliwia program “Identyfikacja obiektów dynamicznych”. Najważniejsze funkcje programu to:
EKSPERYMENT: wprowadzanie z pamięci oscyloskopu cyfrowego zbioru wartości sygnału wejściowego x(ti) i wyjściowego y(ti),
SYMULACJA : symulacja odpowiedzi modeli dynamicznych pierwszego i drugiego rzędu na sygnały wejściowe impulsowe, skokowe, harmoniczne i losowe,
PRZETWARZANIE: wliczenie i wykreślenie zarejestrowanych przebiegów, funkcji autokorelacji i korelacji wzajemnej oraz widm amplitudowych sygnałów (nie wykorzystywane w ćwiczeniu)
IDENTYFIKACJA: rozpoznanie typu modelu i obliczenia jego parametrów.
W ramach funkcji identyfikacja możliwe jest:
zadeklarowanie typu modelu dynamicznego, rozpoznanego na podstawie przebiegów odpowiedzi czasowych,
wybór dziedziny przeprowadzenia identyfikacji (czasowa lub częstotliwościowa),
wybór zakresu danych do wykorzystania (przedziału czasu, w którym punkty z(ti) są interpolowane prostą),
ocena błędów identyfikacji.
Ocena błedów identyfikacji polega na wyliczeniu różnicy odpowiedzi obiektu zgodnego z wyznaczonym modelem i zarejestrowanej rzeczywistej odpowiedzi obiektu badanego, w sposób zilustrowany na rysunku 11.
Rys. 11. Wyznaczanie błędu modelu
W ramach ćwiczenia należy:
1. Przeprowadzić identyfikację obiektów wskazanych przez prowadzącego, a w tym:
zarejestrować odpowiedzi skokowe tych obiektów (funkcja EKSPERYMENT)
wykorzystując funkcję IDENTYFIKACJA wyznaczyć typ i parametry modelu,
na podstawie wykresu błędu modelu ocenić jakość uzyskanego modelu
wybierając optymalny zakres zarejestrowanej odpowiedzi obiektu wyznaczyć takie parametry, dla których błąd modelu jest najmniejszy.
2. Zbadać wpływ błędów w układzie pomiarowm na wyniki identyfikacji, uwzględniając następujące przyczyny błędów:
błędy pomiaru wartości sygnałów wejściowego i wyjściowqego - w oscyloskopie cyfrowym zastosowany jest 8 bitowy przetwornik A/C; zmniejszenie amplitudy skokowego sygnału wejściowego (przy stałej czułości oscyloskopu) powoduje zwiększenie błędów kwantowania.
sygnał wejściowy uzyskiwany z generatora funkcyjnego nie jest idealnym sygnałem skokowym
nie jest możliwe zarejestrowanie odpowiedzi obiektu aż do osiągnięcia stanu ustalonego; zmianę zakresu zarejestrowanej odpowiedzi można uzyskać poprzez zmianę podstawy czasu oscyloskopu
Pytania kontrolne.
Jak opisuje się obiekty w układach sterowania i regulacji?
Wymień podstawowe typu obiektów dynaicznych. Scharakteryzuj ich właściwości.
Na czym polega identyfikacja modeli dynamicznych?
Omów sposóby przeprowadzenia pomiarów w celu uzyskania danych potrzebnych do wyznaczenia modeli obiektów.
Omów metody wyznaczania modeli dynamicznych na podstawie odpowiedzi skokowej.
Omów metody wyznaczania modeli dynamicznych na podstawie charakterystyk częstotliwościowych.
Wymień czynniki powodujące, że modele uzyskane w wyniku identyfikacji nie są dokładne.
Jak ocenić poprawność modelu uzyskanego w wyniku identyfikacji?
(HUk) plik: IDENTYF_27-01.DOC
Laboratorium Podstaw Automatyki Identyfikacja obiektów dynamicznych
1
- 10 -
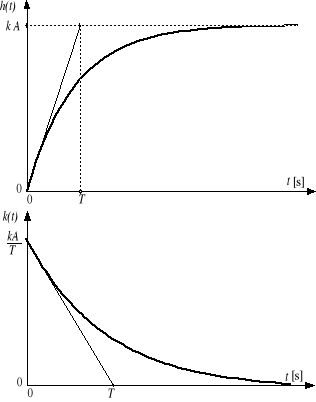
Rys. 2. Odpowiedź skokowa i impulsowa obiektu inercyjnego 1-go rzędu.

Rys. 1. Unormowane charakterystyki częstotli- wościowe obiektu 1-go rzędu.
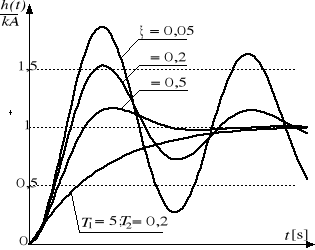
Rys. 4. Odpowiedzi skokowe obiektu oscyla-cyjnego i inercyjnego 2-go rzędu.

Rys. 3. Unormowane charakterystyki często- tliwościowe obiektu 2-go rzędu.
Wyszukiwarka
Podobne podstrony:
Ćw 2 Identyfikacja obiektów dynamicznych doc
SYM T 27-01.DOC, MODELOWANIE CIĄGŁYCH I DYSKRETNYCH UKŁADÓW REGULACJI
REG PID 27-01.DOC, Laboratorium Podstaw Automatyki
Identyfikacja Procesów Technologicznych, Identyfikacja charakterystyki statycznej obiektu dynamiczne
Identyfikacja Procesów Technologicznych, Identyfikacja charakterystyk statycznych obiektu dynamiczne
Identyfikacja Procesów Technologicznych, Identyfikacja parametryczna obiektu dynamicznego (cz.1 i 2)
Identyfikacja Procesów Technologicznych, Identyfikacja parametryczna obiektów dynamicznych, Nr ?wicz
5 Identyfikacja obiektów niebezpiecznych 01
Identyfikacja Procesów Technologicznych, Identyfikacja charakterystyki statycznej obiektu dynamiczne
1 Identyfikacja obiektow sterow Nieznany (2)
IDENTYFIKACJA OBIEKTU, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Filtracja Adaptacyjna Identyfikacja obiektów wer finalna
Identyfikacja obiektów sterowania v2pop, Wydzia? Elektryczny
Identyfikacja obiektów sterowania 9, Wydzia? Elektryczny
Identyfikacja obiektów sterowania 3, Politechnika Lubelska
więcej podobnych podstron