|
AKADEMIA GÓRNICZO - HUTNICZA W KRAKOWIE |
Grupa B
Rafał Szemraj |
||||
EAIiE |
2001/2002
|
Rok II Semestr IV |
Elektrotechnika |
Rok B Grupa 8 |
||
Temat: Charakterystyki dynamiczne podstawowych członów |
||||||
Data wykonania: 2002-03-14 |
Data zaliczenia: |
Ocena: |
||||
Wstęp teoretyczny:
W automatyce przyjęto zwyczajowo opisywać i przedstawiać wszelkiego rodzaju układy sterowania i regulacji za pomocą schematów blokowych. Podstawowymi elementami takich schematów są elementy (bloki, człony) służące do odpowiedniego przekształcania (transformacji) sygnałów. Każdy taki element opisuje pewna formuła matematyczna na podstawie której określa się zależność pomiędzy sygnałem wejściowym elementu (wymuszeniem) a sygnałem wyjściowym (odpowiedzią układu).Niektóre z takich elementów są dość skomplikowane, ale nawet takie można przedstawić jako złożenie kilku tzw. członów elementarnych. Ogólnie rzecz biorąc każdy schemat blokowy stacjonarnego układu liniowego można przedstawić jako kombinację trzech podstawowych członów: proporcjonalnego, różniczkującego i całkującego połączonych w odpowiedni sposób węzłami zaczepowymi i sumacyjnymi. W praktyce niektóre elementy nieco bardziej złożone niż wymienione wyżej, które również można przedstawić jako złożenie członów podstawowych, także zostały zaliczone do członów elementarnych. Ogólnie rzecz biorąc do członów elementarnych zaliczamy:
Proporcjonalny
Całkujący
Różniczkujący idealny
Różniczkujący rzeczywisty
Inercyjny
Oscylacyjny
Jak wspomniałem wcześniej każdy z członów podstawowych opisany jest funkcją matematyczną określającą związek pomiędzy wymuszeniem i odpowiedzią układu. Jakkolwiek układy takie realizują operacje na sygnałach będących funkcjami czasu to do opisu matematycznego tychże elementów posługujemy się tzw. transformatą Laplace'a . Upraszcza to w znaczny sposób opis zarówno pojedynczego elementu jak również układu bardziej złożonego.
Jako cechy charakterystyczne danego elementu przedstawia się jego charakterystyki będące graficznym przedstawieniem działania. Do takich charakterystyk należą:
Ch-ka czasowa, będąca odpowiedzią na skok jednostkowy
,
Ch-ka Bodego (ch-ka amplitudowa i częstotliwościowa)
Ch-ka Nyquista (ch-ka amplitudowo - częstotliwościowa na płaszczyźnie zespolonej
Do podstawowych wielkości opisujących dany element zaliczamy:
Transmitancję operatorową:
Transmitancję widmową:
Moduł transmitancji widmowej:
Faza transmitancji widmowej:
Wzmocnienie (w decybelach [dB]):
Opis członu proporcjonalnego:
Człon proporcjonalny opisany jest następującym równaniem funkcji czasowych:
,, gdzie:
- odpowiednio sygnał wejściowy i wyjściowy.
Po dokonaniu transformaty Laplace'a powyższego równania otrzymujemy:
Stąd transmitancja operatorowa układu:
Zbadajmy odpowiedź układu na wymuszenie w postaci skoku jednostkowego
, czyli
:
Mamy:
, a po dokonaniu transformacji odwrotnej
.
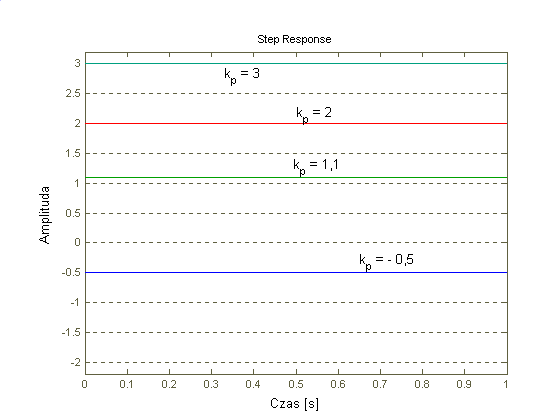
Widzimy więc, że odpowiedź takiego układu jest proporcjonalna do wymuszenia i jest ona stała w czasie (dla skoku jednostkowego). Zbadajmy transmitancję widmową:
⇒
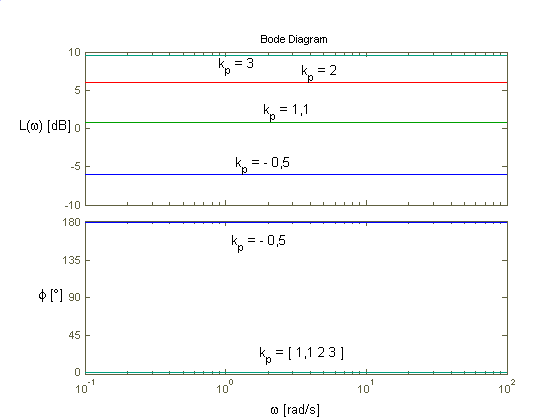
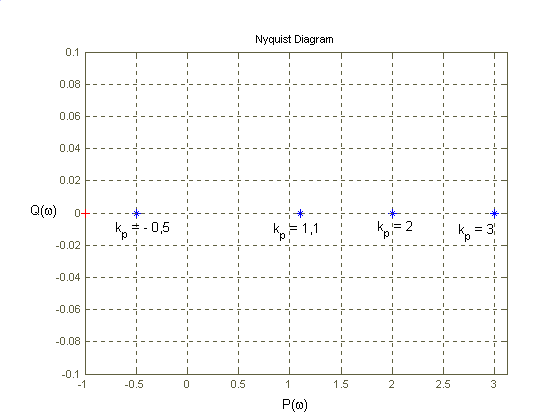
, widzimy więc, że ch-ka Nyquista określonego członu ma postać punktu na osi liczb rzeczywistych (o odciętej kp), część fazowa ch-ki Bodego to linia prosta ponieważ
dla kp> 0 i
dla kp< 0. Ch-ka amplitudowa Bodego jest opisana równaniem
, a więc też jest linią prostą.
Kwestie do rozważenia:
Skala logarytmiczna ch-ki amplitudowo - fazowej pozwala na obserwację zachowania się układu w szerokim widmie częstotliwości.
Wartość wzmocnienia w dB dla zadanych wartości kp:
dla kp = 3
dla kp = 2
dla kp = 1,1
dla kp = -0,5Kąt fazowy wynosi 0 dla kp > 0 i π dla kp < 0.
Ch-ki amplitudowo - fazowe to zbiór punktów kp na osi rzeczywistej
.
Opis członu całkującego (integratora):
Człon całkujący (integrator) opisany jest następującym równaniem funkcji czasowych:
,, gdzie:
- odpowiednio sygnał wejściowy i wyjściowy.
Po dokonaniu transformaty Laplace'a powyższego równania otrzymujemy:
Stąd transmitancja operatorowa układu:
Zbadajmy odpowiedź układu na wymuszenie w postaci skoku jednostkowego
, czyli
:
Mamy:
, a po dokonaniu transformacji odwrotnej
.
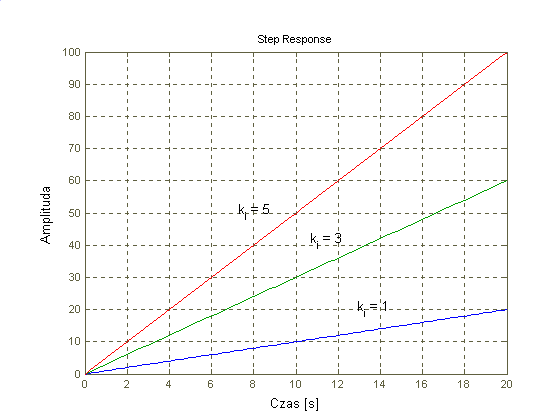
Widzimy więc, że odpowiedź takiego układu jest proporcjonalna do wymuszenia i zarazem wprost proporcjonalna do czasu. Zbadajmy transmitancję widmową:
⇒
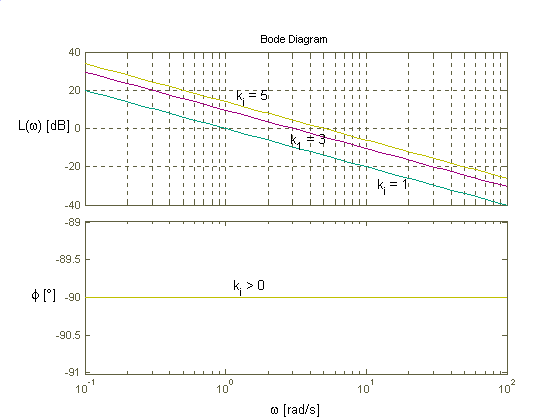
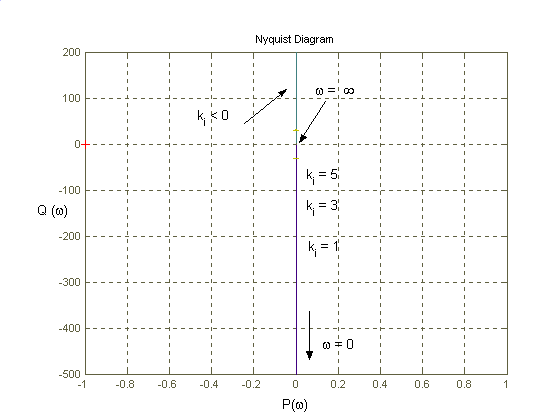
, widzimy więc, że ch-ka Nyquista określonego członu ma postać prostej równoległej do osi urojonej. Ch-ka fazowa jest linią prostą
dla
. Widzimy zatem, że człon całkujący przesuwa sygnał wyjściowy w stosunku do wejściowego o
w zależności od znaku współczynnika wzmocnienia ki. W ten sposób gdy sygnał wymuszenia jest funkcją sinus to na wyjściu otrzymamy wzmocniony ki - krotnie cosinus (czyli całkę sinusa). Patrząc na postać funkcji modułu transmitancji widmowej widzimy, że
, a więc układ całkujący jest filtrem dolnoprzepustowym. Funkcja wzmocnienia ma postać
, a więc ze wzrostem częstotliwości maleje wzmocnienie układu. Jeżeli przyjrzymy się charakterystyce Bodego to zaobserwujemy, że spadek ten wynosi 20 dB na każdą dekadę pulsacji (10-krotny wzrost pulsacji to spadek wzmocnienia o 20 db).
Kwestie do rozważenia:
Brak stanu ustalonego spowodowany jest sposobem działania układu co wynika z jego przeznaczenia:
, a więc odpowiedź jest proporcjonalna do czasu, czyli dla
też dąży do nieskończoności (nie ma swojej granicy).Dla częstotliwości wymuszenia równej częstotliwości charakterystycznej członu układ zachowuje się jak człon proporcjonalny
Wzmocnienie jest proporcjonalne do współczynnika ki , ale zależne też od pulsacji (układ działa jak filtr częstotliwościowy).
Dla
ch-ka Nyquista „zbiega się” w punkcie”
. Dla ki >0
(
) a dla ki <0
(
).
Człon całkujący o transmitancji
można zastąpić kaskadowym połączeniem członu proporcjonalnego
i całkującego
.
Opis członu różniczkującego idealnego:
Człon różniczkujący idealny opisany jest następującym równaniem funkcji czasowych:
,, gdzie:
- odpowiednio sygnał wejściowy i wyjściowy.
Po dokonaniu transformaty Laplace'a powyższego równania otrzymujemy:
Stąd transmitancja operatorowa układu:
Zbadajmy odpowiedź układu na wymuszenie w postaci skoku jednostkowego
, czyli
:
Mamy:
, a po dokonaniu transformacji odwrotnej
.
Odpowiedzią czasowa układu różniczkującego na skok jednostkowy jest nieskończenie krótki i wysoki impuls (delta Diraca), dlatego dla tego członu nie kreśli się ch-ki czasowej. Transmitancja widmowa wygląda tak:
⇒
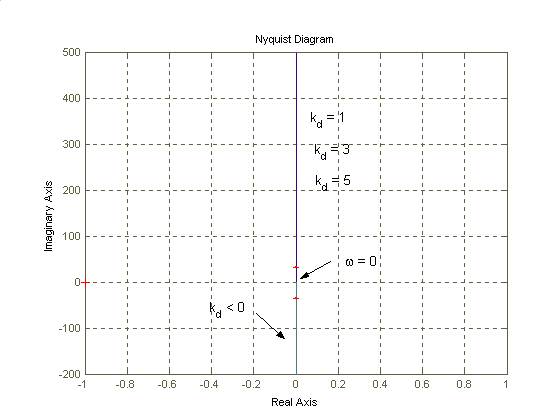
, widzimy, że tak jak dla członu całkującego tak i w tym przypadku ch-ka amplitudowo-częstotliwościowa jest linią prostą równoległą do osi urojonej z tą różnicą, że punkt
mamy dla zerowej pulsacji. Układ odwraca w fazie sygnał wejściowy o
dla
. Podobnie jak w przypadku elementu całkującego wygląda ch-ka wzmocnienia z tą różnicą, że dla członu różniczkującego wzmocnienie rośnie o 20 dB z każdym 10-krotnym wzrostem pulsacji.
Niezależnie od współczynników ki i kd wzmocnienie dla układu całkującego spada a dla układu różniczkującego idealnego wzrasta o 20 dB na dekadę częstotliwości.
Oba układu przesuwają sygnał w fazie o
w zależności od znaku współczynnika wzmocnienia.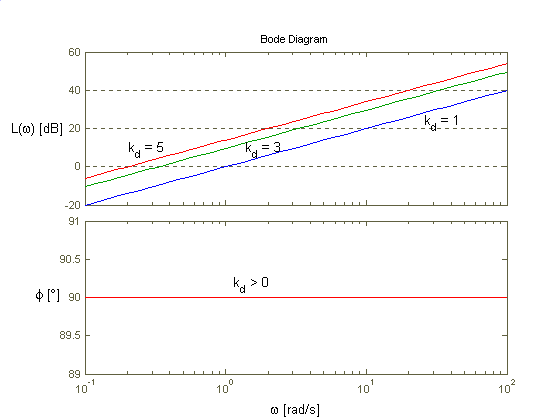
dlatego nie kreślimy ch-ki częstotliwościowej członu różniczkującego idealnego.
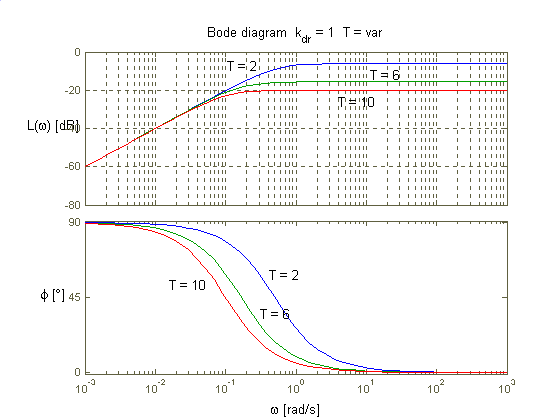
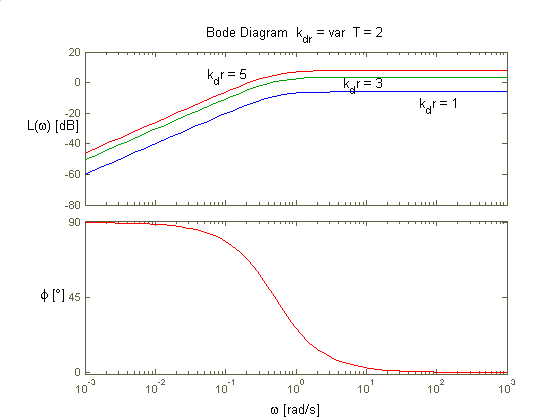
Opis układu różniczkującego rzeczywistego:
Człon różniczkujący rzeczywisty opisany jest następującym równaniem funkcji czasowych:
,, gdzie:
- odpowiednio sygnał wejściowy i wyjściowy.
T - stała czasowa układu
Po dokonaniu transformaty Laplace'a powyższego równania otrzymujemy:
Stąd transmitancja operatorowa układu:
Zbadajmy odpowiedź układu na wymuszenie w postaci skoku jednostkowego
, czyli
:
Mamy:
, a po dokonaniu transformacji odwrotnej
.
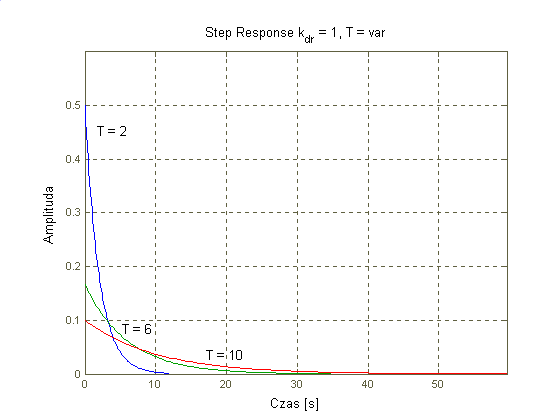
Odpowiedzią czasowa układu różniczkującego rzeczywistego ma postać krzywej wykładniczej malejącej od wartości
do zera. Im stała czasowa T ma większą wartość to czas zejścia krzywej do zera (czas ustalania) jest dłuższy. Prosta styczna do krzywej w punkcie dla t=0 przecina oś czasu w punkcie o rzędnej T. Transmitancja operatorowa ma postać:
⇒
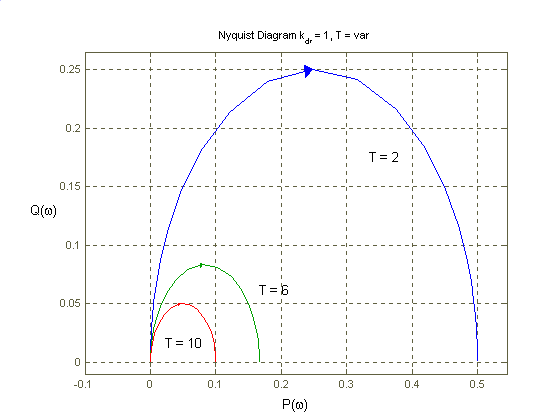
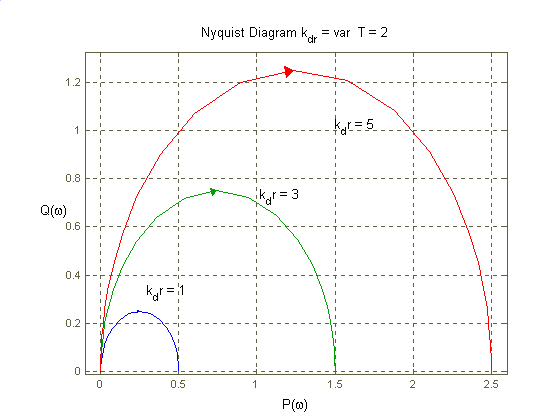
Widzimy, że ch-ki Bodego i Nyquista będą miały bardziej skomplikowaną postać niż dla członu różniczkującego idealnego. Jak widzimy dla charakterystycznego punktu
układ przesuwa sygnał w fazie o kąt 450 niezależnie od wartości i znaku współczynnika wzmocnienia.
Dla członu różniczkującego rzeczywistego istnieje ch-ka czasowa ponieważ odpowiedź układu jest opóźniana przez obecność stałej czasowej.
Im większa stała czasowa tyle razy mniejsza jest amplituda w chwili t=0 sygnału wyjściowego jak również czas ustalenia odpowiedzi (dojście do zera) jest dłuższy a przebieg ma bardziej łagodny kształt. Wzmocnienie wpływa na wartość amplitudy początkowej odpowiedzi (wprost proporcjonalnie).
Porównując ch-ki bodego członu różniczkującego i idealnego zauważamy, że im mniejsza pulsacja sygnału i im mniejsza stała czasowa to ch-ka członu rzeczywistego jest bardziej zbliżona do idealnej.
Na ch-ce Nyquista punkt przegięcia paraboli to punkt dla którego
. Amplituda dla tej pulsacji wynosi
. Inaczej mówiąc dal tej pulsacji wzmocnienie układu maleje o 3dB.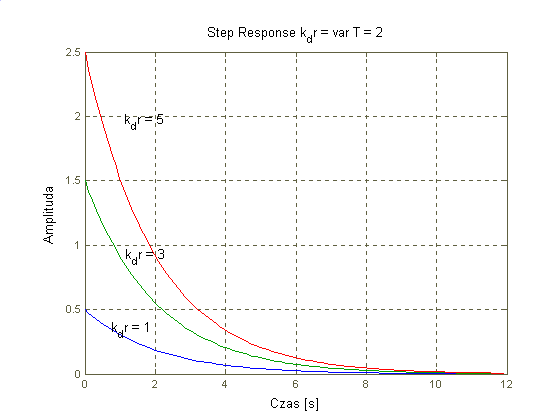
Układ różniczkujący rzeczywisty można zastąpić innymi układami elementarnymi: połączonymi kaskadowo układem proporcjonalnym, różniczkującym idealnym i inercyjnym dla których
.
Charakterystyka dynamiczna podstawowych członów
Rafał Szemraj Strona 9
Wyszukiwarka
Podobne podstrony:
Charakterystyka dynamiczna podstawowych członów cz 2
Charakterystyki dynamiczne podstawowych członów
LAB01 02 Charakterystyki dynamiczne podstawowych cz onów UAR
Charakterystyki częstotliwościowe podstawowych członów dynamicznych v4
Charakterystyki częstotliwościowe podstawowych członów dynamicznych 3
Charakterystyki czasowe podstawowych członów dynamicznych 7543789543
Charakterstyki czasowe podstawowych członów dynamicznych
Charakterstyki czasowe podstawowych członów dynamicznych 2
Charakter częstotliwość podstawowych członów dynamicznych
Badanie dynamiki podstawowych członów dyskretnych
Badanie dynamiki podstawowych członów dyskretnych2
Badanie dynamiki podstawowych członów automatyki
cw 3?danie dynamiki podstawowych czlonow automatyki
Charakterystyki Dynamiczne Członów v 2 0
Analiza podstawowych członów dynamicznych
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE PODSTAWOWYCH OBIEKTÓW DYNAMICZNYCH
Ćw 3 ?danie odpowiedzi skokowej podstawowych członów dynamicznych
układy dynamiki, Badanie podstawowych członów dynamicznych
więcej podobnych podstron