GGs 1. Metody projektowania szczegółowego w scaleniu gruntów
Metody projektowania szczegółowego:
Analityczna - Polega na wyznaczeniu położenia granicy projektowanej działki za pomocą wymiarów (liniowych i kątowych) pomierzonych wprost z gruntu lub ustalonych w drodze rachunkowej, jako wynik przeprowadzonych uprzednio pomiarów terenowych Wada:
Metodą tą można projektować tylko powierzchnie, gdyż nie ma dostatecznej ilości danych dotyczących klas szacunkowych, które pozwoliłyby stosować metodę analityczną przy projektowaniu wartością.
Duża pracochłonność
Można projektować proste figury geometryczne np. jak kwadrat, prostokąt, trapez
Zaleta:
Od razu uzyskujemy wszystkie wymiary niezbędne do realizacji projektu na gruncie i to z dokładnością równą dokładności pomiaru bezpośredniego.
Graficzna - na podstawie miar odczytanych z mapy
Kombinowana - wykorzystuje się miary z terenu i miary odczytane z mapy
Mechaniczna - za pomocą planimetru
Wybór metody zależy od:
Wymaganej dokładność obliczania powierzchni i położenia granic nowo projektowanych działek
Istniejących danych geodezyjnych dla określenia granic zewnętrznych obszaru kompleksu czy grupy działek
Konfiguracji granic
Rozróżniamy 2 grupy metod:
I grupa: metody, które zakładają wykorzystanie wzorów i konstrukcji geometrycznych- określenie położenia projektowanych granic następuje wówczas od razu.
II grupa: metody tzw. kolejnych przybliżeń, stosując te metody nie od razu określa się położenie projektowanej granicy, najpierw w pobliżu spodziewanego miejsca jej przebiegu wykreśla się linię przybliżoną, następnie obliczona zostaje powierzchnia lub wartość tak zaprojektowanej figury, z porównania tej wielkości z wielkością żądaną do zaprojektowania można określić znak i wielkość różnic.
Dokładność wyznaczenia projektowanych elementów przy stosowaniu metod przybliżonych, uzależnione jest przede wszystkim od tych czynników, które charakteryzują dokładność samej mapy: podłoże mapy, skala opracowania, dokładność kartometryczna i inne.
Techniki przybliżone:
średniego ha
metra bieżącego
interpolacji wartości
Metoda z wykorzystaniem metra bieżącego:
Stosowana, gdy do zaprojektowania jest nie powierzchnia, lecz wartość projektowanego obiektu.
Projektowanie rozpoczyna się od wykreślenia linii będącej pierwszym przybliżeniem granicy projektowanej działki, o zadanej wcześniej wartości.
W granicach tak wykreślonej działki oblicza się powierzchnie konturów szacunkowych, a następnie ustala się ich wartość oraz wartość całej działki w pierwszym przybliżeniu.
Porównując obliczoną wartość z żądaną do zaprojektowania wartością działki określić można ich różnicę.
Następnie wzdłuż wykreślonej granicy należy określić wartość paska gruntu o szerokości jednego metra - wartość metra bieżącego.
Na jego podstawie określamy szerokość przesunięcia projektowanej granicy, dzieląc uzyskaną różnicę wartości przez wartość metra bieżącego.
Po przesunięciu granicy o wyliczoną szerokość powtórnie liczy się powierzchnię i wartości składowe konturów szacunkowych oraz wartość działki w drugim przybliżeniu.
Gdy wartość działki w drugim przybliżeniu różni się więcej niż o 3% od wartości zadanej, wówczas czynności opisane należy powtórzyć.
Metoda średniej wartości hektara
obliczamy powierzchnie poszczególnych klas, które następnie wyrównywane są do ogólnej powierzchni kompleksu.
Mnożymy te powierzchnie przez wartości jednostkowe klas a następnie sumujemy iloczyny i otrzymujemy całkowitą wartość kompleksu.
Dzielimy całkowitą wartość kompleksu przez jego powierzchnię i otrzymujemy średnią wartość jednego hektara tego kompleksu.
Mając do zaprojektowania działkę o wartości W, można ustalić jej powierzchnię dzieląc W przez wartość średniego hektara, a następnie określić jej granicę.
Tak zaprojektowana działka traktowana jest, jako pierwsze przybliżenie, w którym po obliczeniu powierzchni i wartości klas gruntów można stwierdzić, o ile różni się wartość zaprojektowana od żądanej.
W przypadku różnicy niedopuszczalnej docina się w odpowiednią stronę paski wyrównujące za pomocą metra bieżącego.
Metoda interpolacji wartości
W zadany fragment kompleksu będący przedmiotem projektowania wrysowuje się układ współrzędnych w taki sposób, że oś x jest prostopadła do zadanego kierunku granic projektowanych działek, zaś os y przechodzi przez punkt załamania granic kompleksu wysunięty najdalej w kierunku x (najbardziej z lewej strony).
Przez wszystkie charakterystyczne punkty kompleksu (początek linii konturu, załamanie granicy konturu, załamanie granicznej linii kompleksu) prowadzi się proste równoległe do granic projektowanych działek. Dla każdej z tych linii oblicza się ich wartość metra bieżącego.
Na osi y ustala się skalę jednostek szacunkowych. Następnie nanosi się na pionowe linie wartości będące sumą wartości poczynając od początku do danej linii. Naniesione punkty łączy się linią, która w odniesieniu do całego kompleksu stanowi linię łamaną niemalejącą. Linia ta przedstawia zależność między wartością kompleksu a odległością mierzoną po osi x.
Samo projektowanie przebiegu granic nowych działek poprzez wrysowanie linii równoległej do kierunku projektowania, przechodzącej przez punkt na wykresie odpowiadający wartości nowej działki.
GGs 2. Projekt techniczny - treść i zasady sporządzenia
Projekt techniczny- opracowanie geodezyjne projektu szczegółowego tj. przygotowanie danych, sporządzenie dokumentów, które pozwalają na wyznaczenie w sposób jednoznaczny, w terenie położenie punktów i linii granicznych nowo zaprojektowanych obiektów powierzchniowych.
Metody ustalania danych realizacyjnych zalezą od zastosowanych metod przy projektowaniu urządzeniowo rolnym:
- jeżeli projektowano metoda analityczna to już w obliczeniach znajdują się dane geodezyjne do wyznaczenia projektu na gruncie (wykorzystywane do sporządzania szkicu dokumentacyjnego)
- jeżeli projektowano metoda graficzna to dane geodezyjne do wyznaczenia projektu na gruncie można ustalić z zapisów danych ustalonych w toku projektowania do którego wykorzystano miary wprost z mapy, czołówki działek zaprojektowanych wyliczone na podstawie powierzchni ostatecznych z wyrównanych szerokości działek
Treść projektu technicznego
Szkic dokumentacyjny powinien zawierać:
konstrukcję istniejącej, pomiarowej osnowy geodezyjnej oraz te szczegóły istniejącej sytuacji terenowej, które są częścią składową nowego stanu
rysunek projektu osnowy realizacyjnej wraz z odpowiednimi oznaczeniami - nazwiska właścicieli, nr punktów osnowy, punktów granicznych, działek.
miary czołowe działek (wymiary liniowe ich krótszych boków), jeeli lezą na liniach osnowy realizacyjnej
długości części boków osnowy realizacyjnej, powstałe w wyniku ich podziału granicami działek lub innymi liniami osnowy
szerokości działek
długości domiarów prostokątnych, odniesione do osnowy realizacyjnej, dla punktów załamania granicy gdy wyznaczana granica jest linią łamaną
GGs 3. Zasady wykorzystania środków unijnych w procesie scalenia gruntów
W Polsce w latach 2004-2006 wdrażany był Sektorowy Program Operacyjny
pt. ”Restrukturyzacja i modernizacja sektora żywnościowego oraz rozwój OW 2004- 2006”, który swoim zakresem obejmował działanie 2.2 - „Scalenie gruntów”.
Realizacja działania 2.2 będzie finansowana ze środków Europejskiego Funduszu Gwarancji i Orientacji w Rolnictwie w kwocie 17 mln euro natomiast 4, 25 mnl euro ze środków państwowych.
W ramach tego działania będzie finansowane:
Opracowanie dokumentacji geod-prawnej obejmującej analizę i ocenę materiałów geodezyjno - kartograficznych
pomiary niezbędne do opracowania projektu scalenia
opracowanie dokumentacji związanej z oceną oddziaływania projektu na środowisko
stabilizacja nowych granic nieruchomości
sporządzenie dokumentacji geodezyjno - prawnej
Finansowane będzie również zagospodarowanie porolnicze obejmujące:
wykonanie zmiany ułożenia lub wybudowania urządzeń służących udostępnianiu i wykorzystaniu gruntów wydzielonych w wyniku scalenia
działania melioracyjne, które w zależności od struktury gospodarstw rolnych są niezbędne do ułatwienia zagospodarowania obszarow
budowa lub modernizacja dróg rolniczych i dojazdowych do zabudowań gosp.
Instytucją zarządzającą programem operacyjnym jest Ministerstwo Rolnictwa i Rozwoju Wsi
Organem odpowiedzialnym za wdrożenie projektu jest samorząd województwa.
Za płatności odpowiada Departament Instytucji Płatniczej w Ministerstwie Rolnictwa.
PROW - program rozwoju obszarów wiejskich na lata 2007 -2013 wspierany przez Europejski Fundusz Rolny Rozwoju Obszarów Wiejskich.
Zakres pomocy dotyczy opracowania projektu scalenia (dokumentacji geodezyjno - prawnej) oraz zagospodarowania poscaleniowego związanego z organizacja rolniczej przestrzeni produkcyjnej.
Instrumenty PROW podzielono na 4 osie, z czego oś pierwsza pt. „Poprawa konkurencyjności rolnictwa i leśnictwa, przez wspieranie restrukturyzacji, rozwoju i innowacji” zawiera działanie 1.7 - poprawienie i rozwijanie infrastruktury, w którym są dwa schematy. Pierwszy schemat dotyczy scalenia gruntów a drugi gospodarowania rolniczymi zasobami wody.
Schemat I - Pomoc udzielana służy poprawie struktury obszarowej poszczególnych gospodarstw rolnych oraz gruntów leśnych. W ramach projektu scalenia przeprowadza się prace w zakresie zagospodarowania poscaleniowego terenu, uwzględniające wymogi środowiska naturalnego.
GGs 4 Metody wyznaczania współrzędnych przestrzennych punktów metodami fotogrametrycznymi i ich zastosowanie do budowy mapy numerycznej
Są dwie grupy metod wyznaczania współrzędnych przestrzennych:
- metody analityczne
- metody stereofotogrametryczne
Metody analityczne dostarczają współrzędnych przestrzennych -3D.
W zależności od powierzchni opracowywanego obiektu rozróżnia się:
aerotriangulację realizującą:
a) metodę wiązek (też nowe współrzędne fotopunktów) -aerotriangulacja z poj zdjec
b) metodę niezależnych modeli (współcześnie wyparta przez metodę wiązek) - aerotriangulacja z poj modeli
Wyznaczane są punkty masowe stanowiące treść mapy syt-wys, oprócz tego wyznaczane są punkty wiążące.
w obrębie pary zdjęć, na podstawie której będzie budowany model, można realizować:
--budowę pojedynczego modelu metodą wiązek
--zastosować metodę DLT
--znając EOZ zdjęć można zrealizować fotogrametryczne wcięcie przód
We wszystkich tych metodach wyznaczamy współrzędne punktów masowych, które stanowią treść mapy syt - wys
Niezależnie od tego jaką metodę zastosujemy to wyznaczane punkty są treścią MN.
W każdej z tych metod uzyskujemy współrzędne XYZ dla dwóch grup punktów:
- punkty sytuacyjne (XY)
- punkty wysokościowe stanowiące numeryczny model terenu (2 warstwy informacyjne)
Pomiar współrzędnych pxl będzie realizowany w trybie pomiaru manualnego, półautomatycznego ewentualnie automatycznego. Realizuje pomiar na fotogrametrycznych stajach cyfrowych ewentualnie na autografach analitycznych.
Metody stereo fotogrametryczne pozwalają na wykonanie pomiarów stereoskopowych w obrębie pojedynczego modelu na autografie cyfrowym techniką stereo digitalizacji.
Aparat cyfrowy jednostka samodzielna lub stanowi fotometryczną staję cyfrową FSC
Warunek wykonania obserwacji:
--wykonanie orientacji zewnętrznej modelu czyli albo metodą sekwencyjną (wew, wzaj, bezwzg) albo metodą jednoczesnej budowy modelu (met wiazek)
GGs 5. Aerotriangulacja przestrzenna - cel, metody, realizacja
Aerotriangulacja to proces wyznaczania współrzędnych terenowych (geodezyjnych) punktów rozmieszczonych na znacznym obszarze, objętym kilkoma czy większą liczbą zdjęć lub stereogramów (tworzących tzw. zespół lub blok zdjęć).
Cel:
Dostarczenie współrzędnych trójwymiarowych X Y Z nowo wyznaczonych punktów (fotopunktów) w układzie terenowym. Powstają one w wyniku odtworzenia orientacji kolejnych zdjęć w danym szeregu.
Metody:
-aerotriangulacja analogowa wykorzystująca autograf
-aerotriangulacja analityczna przy użyciu monokomparatorów, stereokomparatorów i komputerów
W przeszłości wykonywano aerotriangulację analogowo na autografach umożliwiających przeniesienie orientacji z modelu na model. Aerotriangulacja taka wykonywana była szeregami. Później rozwinęły się metody analityczne, z których dorobku korzysta się do dziś.
Obecnie stosowane są metody pozwalające na równoczesne obliczenie i wyrównanie dużych bloków zdjęć lotniczych zawierających nawet kilka tysięcy zdjęć.
Najczęściej stosowane są dwie metody aerotriangulacji:
aerotriangulacja z niezależnych zdjęć (wiązek)
aerotriangulacja z niezależnych modeli.
Realizacja:
Etap 1. Orientacja zewnętrzna ma na celu doprowadzenie zdjęć do kolinearności tzn. ułożenie zdjęć zgodnie ze współrzędnymi terenowymi.
Za pomocą sześciu elementów tej orientacji możemy zrekonstruować położenie wiązki promieni jaka w momencie naświetlania utworzyła obraz w trójwymiarowej przestrzeni. Do elementów tych należą:
trzy elementy liniowe (X, Y, Z) określające położenie środka rzutów w układzie współrzędnych terenowych,
trzy elementy kątowe (ω, ϕ, κ) określające położenie osi kamery pomiarowej względem osi układu odniesienia.
Etap 2. Orientacją wzajemną nazywamy zespół czynności, które przy użyciu przyrządów fotogrametrycznych umożliwiają doprowadzenie pary zdjęć do położenia jakie miały względem siebie w momencie naświetlania.
Do elementów orientacji wzajemnej zaliczamy:
dla pary zdjęć zależnych są to: ωp, ϕp, κp prawego zdjęcia oraz współrzędne liniowe
by i bz, bx traktujemy jako wartość znaną,dla pary zdjęć niezależnych są to: ϕl, κl lewego zdjęcia; ωp, ϕp, κp prawego zdjęcia przy założeniu , że baza fotografowania jest pozioma i ωl =0.
W praktyce orientacja ta polega na pomiarze minimum sześciu punktów homologicznych równomiernie rozmieszczonych na stereogramie, czyli usunięciu paralaks poprzecznych z 6 charakterystycznych obszarów (zwanych obszarami Grubera). Punkty wiążące lokalizuje się w pasach pokrycia podłużnego w celu powiązania modeli, oraz w pasach pokrycia poprzecznego aby połączyć szeregi.
Etap 3. Orientacja bezwzględna (absolutna, geodezyjna) - polega na przetransformowaniu układu współrzędnych modelu (układu lokalnego) do układu współrzędnych terenowych.
Elementami orientacji są:
przesunięcia Δx, Δy, Δz,
kąt obrotu względem układu geodezyjnego,
współczynnik zmiany skali mx, my, mz.
Etap 4 Wyrównanie aerotriangulacji polega na wpasowaniu w układ o znanych współrzędnych terenowych przestrzennej sieci punktów aerotriangulacji.
Metoda wyrównania zależy głównie od metody wykorzystanej w procesie obliczenia aerotriangulacji. Wyznacznikiem wyboru może być etapowość lub równoczesność rozwiązania.
niezależnych modeli - wyznaczenie elementów orientacji bezwzględnej modeli oraz współrzędnych terenowych punktów w bloku MNK
metoda wiązek - jednoczesne wyznaczenie EOZ oraz współrzędnych terenowych punktów w bloku MNK
W procesie wyrównania otrzymujemy:
- EOZ wszystkich zdjęć,
- przestrzenne współrzędne terenowe punktów wyznaczanych,
- odchyłki pomiędzy współrzędnymi otrzymanymi w procesie aerotriangulacji a danymi dla fotopunktów, - odchyłki na punktach kontrolnych,
- elementy opisujące jakość aerotriangulacji:
-- dokładność wewnętrzną,
-- średnie odchyłki na fotopunktach ipunktachkontrolnych,
-- odchyłki maksymalne.
GGs 6. ORTOFOTOMAPA CYFROWA - Istota budowy i zastosowanie
Ortofotomapa - jest obrazem terenu powstałym ze zdjęć lotniczych przetworzonych do jednolitej skali, w założonym odwzorowaniu kartograficznym.
Jest to opracowanie fotogrametryczne, które łączy w sobie zalety zdjęcia lotniczego z tradycyjną mapą.
Tradycyjne metody przetwarzania zdjęć lotniczych pozwalają na opracowanie fotomapy jedynie z terenów o nieznacznych deniwelacjach.
Pochodną takich opracowań jest ortofotomapa, która w sposób tradycyjny powstaje ze zdjęć przetworzonych pasmowo.
W wyniku takiego przetworzenia, przez zmianę rzutu środkowego na ortogonalny, powstaje zdjęcie pozbawione zniekształceń wywołanych deniwelacją terenu i nachyleniem zdjęcia.
Całość prac związanych z produkcją ortofotomapy wymaga przejścia przez kilka etapów:
skanowanie zdjęć (może być pominięty gdy mamy już zdjęcia w formie cyfrowej),
pozyskiwanie NMT,
aerotriangulacja,
ortorektyfikacja.
W przypadku ortofotomapy nie ma szczegółów bardziej lub mniej dokładnie pomierzonych, gdyż wszystkie one zostały odfotografowane na zdjęciu z tą samą dokładnością. Obecnie przy wykorzystaniu nowoczesnej techniki GPS do rejestracji środka rzutów kamery podczas ekspozycji i technik komputerowych, na punktach sygnalizowanych osiągane są dokładności centymetrowe. Dokładność wpasowania boku na osnowę polową wynosi około 6,69 μm, co odpowiada 3,3 cm w terenie. Na punktach niesygnalizowanych te dokładności będą rzędu kilkunastu cm. Dokładność ta zależy w dużej mierze od dokładności identyfikacji szczegółów na zdjęciu.
Różnice między stanem faktycznym widocznym na ortofotomapie, a stanem uwidocznionym w ewidencji gruntów i budynków mogą wynosić nawet do kilkudziesięciu metrów. Oglądając ortofotomapę możemy odróżnić rodzaj zieleni, jej wysokość, sposób ukształtowania terenu, a zwłaszcza sposób zagospodarowania terenu.
Zastosowania:
Idealnie nadaje się do oceny stanu środowiska przyrodniczego,
w zastosowaniach planistycznych i innych.
Ortofotomapa jest najszybszą technologią do wykonania mapy terenu całej gminy.
Jednym z etapów pośrednich tworzenia ortofotomapy jest utworzenie NMT, czyli odtworzenie w postaci numerycznej przestrzennego ukształtowania terenu.
Równocześnie NMT można wykorzystać do innych celów, np.: przy projektowaniu i budowie dróg, planowaniu przestrzennym, w projektowaniu wież przekaźnikowych i innych.
NMT budowany jest na podstawie siatki pomierzonych punktów, które program interpoluje tworząc regularną siatkę. Przy zastosowaniu siatki o bokach 10x10 m najczęściej otrzymujemy dokładność około 0.5 m. Zmniejszenie boków siatki, a co za tym idzie zwiększenie dokładności związane jest ze skalą zdjęć lotniczych, liczbą pomiarów terenowych. Zwiększenie dokładności będzie wymagało większej ilości nakładów pieniężnych i czasowych.
Największą wadą ortofotomapy jest to, że nie wszystkie szczegóły są na niej widoczne. Jest to spowodowane tym, że wysokie obiekty, takie jak drzewa, budynki zasłaniają niekiedy inne obiekty. W celu uzyskania pełnej treści należy pomierzyć niewidoczne fragmenty, lub wykorzystać wektoryzowane fragmenty map, przedstawiające zasłonięty obszar.
Ortofotomapa to zdjęcie lotnicze powierzchni ziemi wykonane z samolotu lub satelity, które zostało przetworzone do postaci metrycznej w rzucie ortogonalnym tzn., że można na nim prowadzić pomiary powierzchni tak jak na mapie.
Aby powstały obraz pozbawiony był wpływu nachylenia zdjęcia oraz deniwelacji terenu trzeba przeprowadzić ortorektyfikację. Do generowania ortoobrazu potrzebujemy zdjęcia cyfrowe o znanych elementach orientacji wewnętrznej i zewnętrznej oraz numeryczny model terenu. Podstawową jednostką, na której przeprowadza się przetworzenie jest piksel. Ortorektyfikację przeprowadza się metodą bezpośrednią, czyli „w przód” oraz pośrednią, czyli „wstecz”.
Tworzenie ortofotomapy - metoda bezpośrednia. Źródło R. TOKARCZUK www.geoforum.pl
Metoda bezpośrednia polega na wykorzystaniu równania kolinearności do wyznaczenia miejsca przebicia promienia rzutującego, przechodzącego przez środek piksela, z numerycznym modelem terenu. Uzyskane w ten sposób współrzędne przestrzenne są następnie rzutowane na powierzchnię ortoobrazu, w odpowiednim układzie współrzędnych i odwzorowaniu kartograficznym. W skutek tego działania geometria obrazu źródłowego a także wielkość i radiometria zmienia się. Niezbędne wiec jest zastosowanie przeróbkowania wszystkich pikseli zdjęcia.
Tworzenie ortofotomapy- metoda pośrednia. Źródło R. TOKARCZUK
www.geoforum.pl
Metoda pośrednia „wstecz” zaczyna się od zdefiniowania współrzędnych środków wszystkich pikseli ortofotogramu, bez znajomości jasności pikseli. Kolejno przetwarzane są wszystkie piksele ortoobrazu, których współrzędne X i Y są znane. Współrzędna Z wyznaczana jest z interpolacji NMT. Następnie obliczane jest na zdjęciu miejsce odpowiadające środkowi piksela ortofotomapy, wyliczone w ten sposób punkty nie są zazwyczaj środkami pikseli wiec jasność ich musi być interpolowana względem otaczających je pikseli. Uzyskana w ten sposób jasność piksela przypisywana jest odpowiedniemu pikselowi ortofotomapy.
Zastosowanie:
- tworzenie i weryfikacja bazy działek referencyjnych dla systemu LPIS,
- zasilanie baz danych topograficznych
- do modernizacji EGiB
- do potrzeb planowania przestrzennego
- do prac związanych z ochroną środowiska
- dla turystyki
- dla obronności kraju
- dla nawigacji
GGs7 Fotogrametryczne metody badania deformacji i przemieszczeń obiektów inżynierskich
1. Odkształcenia obiektu- zmiana kształtu lub objętości albo zmiana kształtu i objętości obiektu powodująca zmiany wzajemnych odległości jego punktów. Odkształcenia obiektu mogą być liniowe, postaciowe, objętościowe, trwałe, sprężyste lub graniczne.
2. Przemieszczenia obiektu- zmiana położenia obiektu polegająca na przesunięciu albo obrocie lub przesunięciu i obrocie, przy której- wzajemne odległości wszystkich punktów obiektu nie ulegają zmianie. Przemieszczenia obiektów mogą być trwałe, nietrwale lub graniczne.
Należy zastanowić się czy deformacje, przemieszczenia są w płaszczyźnie 2D czy też mają charakter 3D
2D - transformacja rzutowa (pomiar deformacji belki) :
--transformacja 8 -parametrowa
--przekształcenie rzutowe płaszczyzny zdjęcia do płaszczyzny obiektu,
--wymaga 4 fotopuntów o wsp XY,
--Z-const
--metoda 2 etapowa- Ieta to wyznaczenie współczynników transformacji, Iietap to przejście z ukł pierwotnego do wtórnego
- fotogrametryczne wcięcie wstecz
3D pozostałe metody analityczne:
- metoda wiązek:
opiera się o nieliniowa postać równań a po linearyzacji staje się najdokładniejsza metoda analityczna w fotogrametrii
- metoda bezpośredniej transformacji liniowej DLT
- niezależnych modeli (najmniej efektywne)
GG s 8 Porównaj pod względem uzyskiwanych dokładności odczytu - kodowe, impulsowe i dynamiczne metody elektronicznych systemów odczytowych
Kodowy dokładność 10 c
Impulsowy (inkrementalny) dokładność10cc
Dynamiczny dokładność 1c
Elektroniczne systemy pomiaru kierunków wymagają zastosowania przetworników zamieniających mierzony kierunek na odpowiednie sygnały elektroniczne.
W istniejących i stosowanych aktualnie systemach elektronicznych można wyróżnić dwa rodzaje przetworników typu kąt-napięcie (natężenie):
Grupa I - przetworniki położenia, każdemu położeniu lunety teodolitu odpowiada jednoznacznie określony stan napięcia. Należą do tej grupy przetworniki kodowe.
Grupa II - przetworniki kąta, odpowiednim zmianom położenia lunety odpowiada ściśle określona liczba impulsów - przetworniki impulsowe.
Systemy kodowe pomiaru kierunków
Najistotniejszym elementem systemu jest tarcza kodowa zastępująca krąg poziomy w teodolicie. Sprężona jest z alidadą teodolitu, na której jest luneta.
Na tarczy kodowej znajduje się wiele koncentrycznych ścieżek o różnych średnicach, przy czym na każdej z tych ścieżek znajduje się na przemian ległe pola jasne i ciemne.
Każda ścieżka zawiera parzystą liczbę pól zwanych segmentami.
- ścieżka pierwsza zawiera dwa interwały,
- ścieżka druga -cztery interwały,
- ścieżka trzecia -osiem itd.
Uzyskanie odpowiedniej dokładności odczytu kierunku wymaga zastosowania tarczy kodowej z odpowiednią liczbą ścieżek, z których ostatnia musi być podzielona na pola o bardzo małych odstępach.
Wiązki świetlne, przepuszczane przez przeźroczyste pola tarczy, padają na fotodiody odbiorcze tworzące układ zwany matrycą fotodetektorów.
Wiązki świetlne wzbudzają w odpowiedniej diodzie sygnał elektryczny (napięcie), któremu w kodzie dwójkowym przypisuje się zwykle stan 0, podczas gdy pole nieprzeźroczyste określa stan 1.
Do odczytywania kierunków na tarczy kodowej stosowany jest czytnik, fotodiodowy, który analogową wartość kierunku przetwarza na odczyt cyfrowy w naturalnym kodzie dwójkowym.
Systemy impulsowe pomiaru kierunków
W odróżnieniu od systemu kodowego zastosowano w nim tarcze z jedną ścieżką zawierającą N równych interwałów oraz czytnik impulsów, generowanych w trakcie obrotu tarczy.
Tarcza i czytnik tworzą tzw. impulsowy przetwornik kąta.
Przetwornik taki może działać na zasadzie galwanicznej, magnetycznej lub optycznej.
W przyrządach geodezyjnych stosowane są tylko przetworniki optyczne ze względu na swoją najwyższą dokładność.
W przetworniku ścieżka kręgu podziałowego zawiera N pól przeźroczystych oddzielonych od siebie polami nieprzeźroczystymi. Przy czym podstawową działką systemu jest tak zwany inkrement o szerokości 2N (pole przeźroczyste i nieprzeźroczyste).
Wartość kątowa takiego inkrementu równa się 400g/N.
Sygnał elektryczny, który powstaje w fotodiodzie, jest najpierw wzmacniany a następnie przekształcany w przebieg prostokątny. Ten po zróżniczkowaniu zamieniany jest na przebieg impulsowy.
Ilość impulsów zliczana jest przez licznik, a na jej podstawie wyznacza się wartość kąta.
α= nα· 400g/N
Dynamiczny system pomiaru kątów
- systemem impulsowym, składającym się z wirującej tarczy z naniesionymi polami przeźroczystymi i nieprzeźroczystymi oraz dwóch czytników fotoelektrycznych określających bezwzględne położenie obydwu ramion mierzonego kąta,
- pomiar kąta składa się z pomiaru zgrubnego i dokładnego,
Do pomiaru zgrubnego na tarczy umieszczony jest dodatkowy element, który uruchamia system w momencie przejścia przez pierwszy czytnik i zamyka przy przejściu przez drugi. Zliczane są przy tym całkowite ilości interwałów pomiarowych.
Pomiar precyzyjny jest w zasadzie pomiarem różnicy czasów między sinusoidalnymi sygnałami pomiarowymi powstającymi w obu czytnikach - jednym nieruchomym związanym ze spodarką i drugim ruchomym związanym z lunetą. Różnica czasów określona jest pośrednio, jako różnica kątów fazowych. Dzięki temu, że różnica faz jest uśredniana z kilku tysięcy okresów to dokładność tego systemu jest w zasadzie większa od klasycznych systemów impulsowych.
GGs 9 Obowiązująca systematyka współczesnych osnów geodezyjnych
Osnowa pozioma
osnowę podstawową stanowią punkty wyznaczone w sieciach geodezyjnych o najwyższej dokładności, przy czym rozmieszczenie ich powinno być równomierne na obszarze całego kraju. Osnowa ta służy do badania kształtu i wymiarów Ziemi oraz do nawiązania i wyrównania osnów szczegółowych w państwowym układzie współrzędnych i państwowym układzie wysokości.
osnowa szczegółowa stanowi rozwinięcie osnowy podstawowej, przy czym stopień zagęszczenia punktów powinien być zróżnicowany w zależności od charakteru terenu. Służą do nawiązania i wyrównania osnów pomiarowych, zdjęć fotogrametrycznych i numerycznych modeli terenu w państwowym układzie współrzędnych i wysokości.
osnowa pomiarowa stanowi rozwinięcie osnowy szczegółowej, przy czym dokładność, stopień zagęszczenia i sposób rozmieszczenia powinny być dostosowane do konkretnych zadań geodezyjno - kartograficznych i przyjętej technologii ich realizacji. Służą do oparcia pomiarów sytuacyjnych i rzeźby terenu, wyznaczenia projektów na gruncie, wykonania pomiarów realizacyjnych przy obsłudze inwestycji oraz badania przemieszczeń i odkształceń obiektów budowlanych i podłoża gruntowego.
Pod względem dokładności wyznaczenia położenia punktów, podstawowa i szczegółowa osnowa dzieli się na trzy klasy, oznaczone cyframi rzymskimi. Punkty osnowy podstawowej zalicza się do I klasy, a punkty osnowy szczegółowej do II i III klasy. Dokładność określenia położenia punktów poszczególnych klas charakteryzują następujące błędy średnie po wyrównaniu:
Rodzaj osnowy |
Klasa |
Przeciętny błąd względny długości boku mL |
Błąd położenia punktu względem punktów nawiązania mp |
|
|
|
|
Metody |
|
|
|
|
klasyczne |
satelitarne |
Podstawowa |
I |
mL/L 5 · 10 -6 |
- |
- |
Szczegółowa |
II |
- |
mp 0,05 m |
mp 0,03 m
|
|
III |
- |
mp 0,10 m
|
mp 0,07 m
|
Pomiarowa |
|
- |
mp 0,20 m |
mp 0,10 m |
Błędy średnie należy obliczać przy założeniu bezbłędności punktów nawiązania. Wszystkie punkty osnowy podstawowej i szczegółowej powinny posiadać współrzędne obliczone w państwowym układzie współrzędnych oraz być zaklasyfikowane do jednej z tych klas.
Osnowa wysokościowa
1. Osnowę podstawową stanowią punkty wyznaczone w sieciach geodezyjnych o najwyższej dokładności, przy czym rozmieszczenie elementów tych sieci (linii niwelacyjnych) powinno być możliwe równomierne na obszarze całego kraju.
2. Osnowa szczegółowa, o niższej dokładności niż osnowa podstawowa, stanowi jej zagęszczenie, przy czym stopień zagęszczenia powinien być zróżnicowany w zależności od intensywności zagospodarowania terenu,.
3. Osnowa pomiarowa, o niższej dokładności niż osnowa szczegółowa, stanowi jej zagęszczenie. Tworzą ją - prócz punktów niwelacyjnych - również punkty osnowy poziomej, których wysokości zostały określane metodą niwelacji geometrycznej, trygonometrycznej lub tachimetrii. Dokładność, stopień zagęszczenia i sposób rozmieszczenia punktów powinny być dostosowane do konkretnych zadań geodezyjno - kartograficznych i przyjętej technologii ich realizacji.
Dokładność osnowy danego rodzaju i klasy charakteryzuje ogólnie średni błąd pomiaru niwelacji, po wyrównaniu (mo).
Przyjmuje się następującą odpowiedniość między rodzajem osnowy, techniką jej pomiaru i klasą tego pomiaru:
Rodzaj osnowy |
Technika pomiaru |
Klasa |
mo |
Podstawowa |
Niwelacja precyzyjna |
I |
± 1,0 |
Szczegółowa |
Niwelacja techniczna x) |
III |
± 4 lub 10 dla mH xx) ± 10 lub 20 dla mH xx) |
Pomiarowa |
Niwelacja techniczna niwelacja trygonometryczna |
V |
± 20 lub ± 5cm dla mH xx) |
x) w szczególnych przypadkach może być zastosowana niwelacja precyzyjna
xx) dopuszczalna wartość średniego błędu wyznaczenia wysokości punktu mH odnosi się do pozostałych technik pomiaru, poza niwelacją techniczną.
Średnie błędy osnowy danej klasy wyznacza się przy założeniu bezbłędności punktów nawiązania.
Osnowa zerowego i pierwszego rzędu
połączenie osnowy podstawowej znajdującej się na terenie Polski z osnową europejską EUREF nastąpiło za pośrednictwem 11 punktów sieci EUREF-POL stanowiących osnowę zerowego rzędu,
348 punktów sieci POLREF stanowi rząd pierwszy i jest zagęszczeniem EUREF-POL
Sieć POLREF założono w latach 1994-95, przeprowadzając 3 kampanie pomiarowe, w wyniku, których wyznaczono 348 zespołów po 2 punkty (główny i kierunkowy) nawiązanych do 11 punktów sieci EUREF-POL.
Pierwsza jednorodna trójwymiarowa osnowa geodezyjna o wysokiej dokładności.
Błąd położenia dla składowych poziomych - poniżej 0.01 m, dla wysokości elipsoidalnej - około 0.015 m.
Punkty POLREF mają określone kartezjańskie współrzędne przestrzenne XYZ
(czyli równocześnie geodezyjne elipsoidalne BLh) w układzie geocentrycznym EUREF-89 i wysokości normalne z dowiązania niwelacją precyzyjną do osnowy wysokościowej w układzie Kronsztad '86 (te ostatnie tylko dla punktów głównych - centrów).
GGs 10 Zakres uprawnień zawodowych w dziedzinie geodezji i kartografii w świetle ustawy
Ustawa Prawo geodezyjne i kartograficzne z dnia 17 maja 1989 r.
Uprawnienia zawodowe do wykonywania samodzielnych funkcji w dziedzinie geodezji i kartografii
Art. 42.
1. Do wykonywania samodzielnych funkcji w dziedzinie geodezji i kartografii jest niezbędne posiadanie uprawnień zawodowych.
2. Przez wykonywanie samodzielnych funkcji w dziedzinie geodezji i kartografii rozumie się:
1) kierowanie pracami geodezyjnymi i kartograficznymi, podlegającymi zgłoszeniu do państwowego zasobu geodezyjnego i kartograficznego, oraz sprawowanie nad nimi bezpośredniego nadzoru;
2) wykonywanie czynności rzeczoznawcy z zakresu prac geodezyjnych i kartograficznych, podlegających zgłoszeniu do państwowego zasobu geodezyjnego i kartograficznego;
3) pełnienie funkcji inspektora nadzoru z zakresu geodezji i kartografii;
4) wykonywanie czynności technicznych i administracyjnych związanych z rozgraniczaniem nieruchomości;
5) wykonywanie prac geodezyjnych i kartograficznych niezbędnych do dokonywania wpisów w księgach wieczystych oraz prac, w wyniku, których mogłoby nastąpić zagrożenie dla zdrowia lub życia ludzkiego.
3. Osoby wykonujące samodzielne funkcje w dziedzinie geodezji i kartografii są obowiązane wykonywać swoje zadania z należytą starannością, zgodnie z zasadami współczesnej wiedzy technicznej i obowiązującymi przepisami prawa.
Art. 43. Uprawnienia zawodowe nadaje się w następujących zakresach:
1) geodezyjne pomiary sytuacyjno-wysokościowe, realizacyjne i inwentaryzacyjne;
2) rozgraniczanie i podziały nieruchomości (gruntów) oraz sporządzanie dokumentacji do celów prawnych;
3) geodezyjne pomiary podstawowe;
4) geodezyjna obsługa inwestycji;
5) geodezyjne urządzanie terenów rolnych i leśnych;
6) redakcja map;
7) fotogrametria i teledetekcja;
Art. 44. 1. Uprawnienia zawodowe w dziedzinie geodezji i kartografii mogą otrzymać osoby, które:
1) posiadają wyższe lub średnie wykształcenie geodezyjne;
2) posiadają 3 lata praktyki zawodowej w wypadku wykształcenia wyższego i 6 lat praktyki zawodowej w wypadku wykształcenia średniego;
3) wykażą się znajomością przepisów w dziedzinie geodezji i kartografii;
4) posiadają nienaganną opinię zawodową.
2. Uprawnienia zawodowe w zakresach, o których mowa w art. 43 pkt 6 i 7, mogą otrzymać również osoby posiadające wyższe wykształcenie geograficzne o specjalności kartografia albo innej specjalności, po ukończeniu podyplomowego studium w zakresie kartografii.
3. Osoby posiadające w dziedzinie geodezji i kartografii tytuł naukowy profesora albo I lub II stopień specjalizacji zawodowej, nadane w trybie odrębnych przepisów, są zwolnione z wymogów określonych w ust. 1 pkt 2 i 3.
4. Główny Geodeta Kraju może w uzasadnionych wypadkach, na wniosek osoby ubiegającej się o uzyskanie uprawnień zawodowych, uznać posiadanie innego pokrewnego wykształcenia i długoletniej geodezyjnej lub kartograficznej praktyki zawodowej za spełnienie wymagań kwalifikacyjnych, o których mowa w ust. 1 i 2.
Art. 45. 1. Uprawnienia zawodowe nadaje Główny Geodeta Kraju na podstawie wyników postępowania kwalifikacyjnego, przeprowadzonego przez komisję kwalifikacyjną do spraw uprawnień zawodowych.
2. Nadanie uprawnień zawodowych stwierdza się świadectwem. Odmowa nadania uprawnień zawodowych następuje w drodze decyzji.
3. Główny Geodeta Kraju powołuje komisję do spraw uprawnień zawodowych z udziałem przedstawicieli stowarzyszeń społeczno-zawodowych działających w dziedzinie geodezji i kartografii, a także prowadzi centralny rejestr osób posiadających uprawnienia zawodowe.
4. Koszty postępowania kwalifikacyjnego ponosi osoba ubiegająca się o nadanie uprawnień zawodowych.
5. Minister właściwy do spraw architektury i budownictwa(15) określi, w drodze rozporządzenia, sposób, tryb i szczegółowe warunki nadawania uprawnień zawodowych oraz działania komisji kwalifikacyjnej do spraw uprawnień zawodowych w dziedzinie geodezji i kartografii, a w szczególności:
1) tryb składania wniosków o nadanie uprawnień zawodowych,
2) sposób i warunki uznania praktyki zawodowej,
3) organizację działania komisji kwalifikacyjnej,
4) sposób przeprowadzania postępowania kwalifikacyjnego i ustalania jego kosztów,
5) wzory świadectw tych uprawnień,
6) sposób prowadzenia i zakres danych centralnego rejestru osób posiadających uprawnienia zawodowe
- mając na uwadze potrzebę oceny umiejętności samodzielnego wykonywania prac zgodnie z obowiązującymi przepisami prawa i zasadami współczesnej wiedzy technicznej.
GGs 11 Metody wyznaczania współczynnika refrakcji
Geodezyjne metody wyznaczania współczynnika refrakcji z pomiaru kątów pionowych
Wyznaczanie współczynnika refrakcji k na podstawie przewyższenia Δh, odległości skośnej S oraz kąta αob
Obliczenie współczynnika refrakcji na podstawie αob, wysokości HP, HK punktów geodezyjnych oraz ip, wk instrumentu i celu, przy znanych współrzędnych końcowych punktów przęsła w odwzorowaniu Gaussa-Krügera
Wyznaczanie współczynnika refrakcji k na podstawie obserwacji synchronicznych dwustronnych
Wyznaczenie współczynnika refrakcji k ze wzoru na przewyższenie Δh
Wyznaczanie współczynnika refrakcji na podstawie pomiaru i analizy warunków atmosferycznych (temperatura, ciśnienie i pionowy gradient temperatury)
Wyznaczanie współczynnika refrakcji według torii Jordana
Wyznaczanie współczynnika refrakcji według torii Levallois i de Mason
Wyznaczenie współczynnika refrakcji z dyspersji światła w atmosferze
3.1. Geodezyjne metody wyznaczania współczynnika refrakcji z pomiaru kątów pionowych
3.1.1. Wyznaczanie współczynnika refrakcji k na podstawie przewyższenia Δh, odległości skośnej S oraz kąta αob
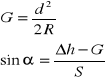
Kąt refrakcji δ można wyznaczyć z elementarnego wzoru:
δ = αob - α
α- kąt nachylenia odcinka IE do poziomu.
Dla znanej wartości przewyższenia Δh= S - sinα + G
otrzymujemy: ![]()
G- głębokość horyzontu:
![]()
Współczynnik refrakcji k obliczymy ze wzoru:
![]()
co jest słuszne dla δ wyrażonego w mierze łukowej.
3.1.2. Obliczenie współczynnika refrakcji na podstawie αob, wysokości HP, HK punktów geodezyjnych oraz ip, wk instrumentu i celu, przy znanych współrzędnych końcowych punktów przęsła w odwzorowaniu Gaussa-Krügera
Zadanie jest analogiczne, różnica polega na tym, że zamiast odległości skośnej S mamy dane pozwalające na obliczenie odległości d na płaszczyźnie Gaussa-Krügera.
Podany wzór ![]()
będzie można wykorzystać, jeśli na podstawie dG wyznaczymy odległość skośną S.
1. Obliczamy odległość dG na płaszczyźnie Gaussa-Krügera:
![]()
2. Obliczamy poprawkę odwzorowawczą pd i długość łuku na powierzchni odniesienia:
pd = 1228 - Ys2 - dG*1011
gdzie
YS - rzędna środka odcinka wyrażona w kilometrach,
dG oraz pd w metrach, przy czym: d = dG - pd
3. Obliczamy odległość skośną S ze wzoru:
![]()
przy czym: hp = Hp + ip, hK = HK + wK, Δh = hK - hp , ∑h = hK + hp.
4. Obliczamy głębokość horyzontu G i kąt α:
5. Obliczamy kąt refrakcji δ i współczynnik k:

Wyznaczanie współczynnika refrakcji k na podstawie obserwacji synchronicznych dwustronnych
Wyznaczenie współczynnika k z jednoczesnego pomiaru odległości zenitalnych na końcu linii.
Napiszmy równanie dla stanowisk A i B:
![]()
![]()
Przez dodanie równań wyeliminujemy nieznaną różnicę wysokości Δh, a współczynnik k wyznaczymy ze wzoru:
![]()
Wyrażenie (wA+wB) zostanie pominięte, jeżeli będziemy celować w lunety teodolitów.
Właśnie ta metoda posłuży do wyznaczenia współczynnika refrakcji. Wybór tej metody uwarunkowany był możliwościami sprzętowymi oraz zgromadzonymi materiałami geodezyjno - kartograficznymi.
Wyznaczenie współczynnika refrakcji k ze wzoru na przewyższenie Δh
Jeśli mamy dane poziomy Hp, HK punktów geodezyjnych P, K, wysokości i, w instrumentu i celu oraz długość łuku d na poziomie instrumentu, to mierząc kąt pionowy αob współczynnik refrakcji k można obliczyć w sposób następujący:
![]()

a po przekształceniu:

Analogicznie wyznaczamy k w przypadku, gdy zamiast długości łuku mamy odległość skośną S:
![]()
Jest oczywiste, że wartość Δh, występującą w powyższych wzorach, oblicza się na podstawie znanych poziomów punktów geodezyjnych oraz wysokości instrumentu i celu:
Δh = (HK + w) - (Hp + i)
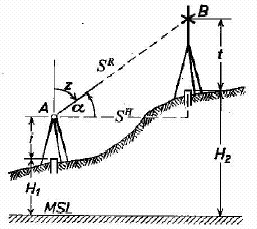
GGs12 Geodezyjne wykorzystanie niwelacji trygonometrycznej
Niwelacja trygonometryczna jest metodą wyznaczania różnic wysokości na podstawie zmierzonego kąta pionowego (kąta pochylenia lub kąta zenitalnego) i zmierzonej w terenie lub wyznaczonej ze współrzednych odległości.
Pomiary wykonujemy na fizycznej powierzchni Ziemi.
Wynikiem pomiarów metodą niwelacji trygonometrycznej mają być różnice wysokości, a następnie będą obliczane wysokości punktów.
Należy przyjąć powierzchnię odniesienia, względem której będą wyznaczane te wysokości.
Za powierzchnie odniesienia w geodezji mogą być przyjmowane: elipsoida obrotowa, geoida, kula, płaszczyzna.
Na bliskie zasięgi - powierzchnia odniesienia to płaszczyzna
Mierzymy: α, Z, w, i,
Dane: H1
Wzór na różnicę wysokości ma wtedy postać:
ΔH= s0 tgα + i - w
H2 = H1+ i + S0tgα - w
s0- odl zredukowana
α - kąt pionowy
i - wysokość instrumentu
w - wysokość sygnału
Odległości, dla których stosujemy takie rozwiązanie nazywane bywają odległościami krótkimi. Granicą tych odległości, tak zwanych krótkich, jest 300 m, w zależności od dokładności wyznaczanej różnicy wysokości.
Na dalekie zasięgi - powierzchnia odniesienia to kula
Celowe AB są rzędu kilku kilometrów (lub krótsze).
Powierzchnią odniesienia jest sfera kuli o promieniu R równym średniemu promieniowi ziemskiemu dla danego obszaru.
A0, B0 - rzuty punktów A i B na powierzchnię odniesienia
s0 - długość na powierzchni odniesienia między A0 i B0
W punktach A i B o wysokościach odpowiednio HA i HB zmierzone są kąty pionowe (zenitalne z lub pochylenia α). Promień świetlny z A do B lub z B do A przebiega, na skutek refrakcji, wzdłuż linii krzywej, zwanej krzywą refrakcji o średnim promieniu krzywizny r. Proste AB' i BA' są to styczne do krzywej refrakcji.
Odległość s0 na poziomie morza jest wyznaczona ze współrzędnych punktów A i B. Może być również za pomocą dalmierza elektrooptycznego zmierzona odległość skośna AB, zamiast obliczonej odległości s0.
![]()
![]()
wpływ krzywizny Ziemi
![]()
wpływ refrakcji.
K - współczynnik refrakcji pionowej- może mieć wartość ujemna nad powierzchnią wody
Interpretacja geometryczna wzoru z uwzględnieniem wysokości instrumentu i nad punktem geodezyjnym i wysokość sygnału:
![]()
Dokładność niwelacji trygonometrycznej
wnioski:
Wpływ błędu pomiaru kąta rośnie proporcjonalnie do odległości
Wpływ błędu długości ma znaczenie tylko przy dużych różnicach wysokości
Wpływ błędu współczynnika refrakcji rośnie proporcjonalnie do kwadratu odległości
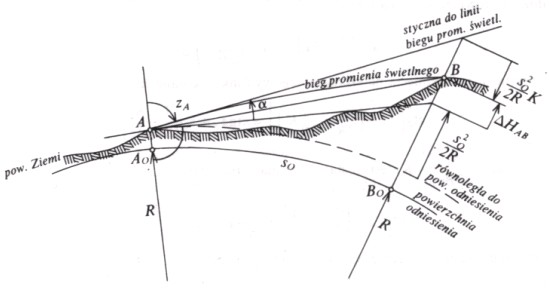
3. Wyznaczanie wysokości punktów niedostępnych
Odległość d jest zmierzona do punktu C', który jest rzutem punktu C na powierzchnię terenu. Punkt C może nie pokrywać się z punktem geodezyjnym zastabilizowanym w terenie ze względu na mimośród sygnału. O jest odczytem z łaty, ustawionej na właściwym znaku geodezyjnym, średnim z dwóch odczytów wykonanych' w dwóch położeniach poziomej lunety. Wzór na wysokość punktu C nad znakiem geodezyjnym ma postać
![]()
Jeśli odległość d nie może być pomierzona bezpośrednio, to w celu wyznaczenia wysokości niedostępnego punktu nad przyjętym poziomem odniesienia stosujemy konstrukcje geodezyjne
Jednym ze sposobów wyznaczenia odległości d, jest zastosowanie przy pomiarze konstrukcji trójkąta równobocznego.
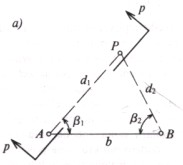
P- punkt niedostępny
A- pierwszy punkt bazy
B- drugi punkt bazy
Odległość d1 oraz d2 wyznaczane są z rozwiązania trójkąta ABP.
Wykonujemy pomiar: długość bazy b, kąty poziome β1 i β2, kąty pionowe α1 i α2, wysokość horyzontu instrumentu nad reperem za pomocą odczytów Ol i O2 na łacie przy poziomej osi celowej teodolitu
Wysokość punktu P nad reperem wyznaczamy dwukrotnie z wzorów:
![]()
i ![]()
Jeśli warunki terenowe nie pozwalają na zrealizowanie w terenie trójkąta w przybliżeniu równobocznego w celu wyznaczenia odległości, wtedy stosujemy konstrukcję pokazaną na rysunku
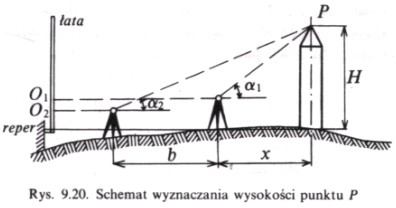
Baza b jest usytuowana w taki sposób, aby jej przedłużenie przechodziło przez punkt P, którego wysokość jest wyznaczana.
Mierzymy następujące elementy :
kąty pionowe α1. α2, długość bazy b, odczyty O1 oraz O2 na łacie ustawionej na reperze odniesienia (przy poziomej osi celowej teodolitu).
wzór na wysokość H punktu P:
![]()
![]()
Przyrównując do siebie wysokości określone obydwoma wzorami, możemy wyznaczyć odległość x:
![]()
Po obliczeniu odległości x na podstawie powyższego wzoru, oblicza się różnice wysokości stosując obydwa z przytoczonych wzorów. Konstrukcja jest jednoznaczna, dwa wzory na wysokość dają wyłącznie kontrolę obliczeń. Stosując taką konstrukcję do wyznaczenia wysokości, zakładamy najczęściej w terenie dwie bazy niezależne.
Przykłady zastosowań niwelacji trygonometrycznej
Wyznaczanie wysokości punktów poziomej sieci szczegółowej
Poprawki ze względu na mimośród poziomy do kąta pionowego
Wyrównanie różnic wysokości punktów poziomej sieci szczegółowej
Wyznaczanie różnic wysokości punktów ciągu poligonowego
Wyznaczanie różnic wysokości punktów za pomocą różnych konstrukcji pomiarowych
Wyznaczanie wysokości punktów niedostępnych
GGs 13. Atestacja, komparacja i okresowe sprawdzanie dalmierzy laserowych
Dalmierz laserowy - (ang. laser target marker LTM lub laser rangefinder LRF) urządzenie do określania odległości od nieprzezroczystego obiektu przy pomocy promienia lasera (zwykle podczerwonego). Dalmierze używane są w wojsku i przez policje, w sporcie (w golfie, do strzeleń długodystansowych i przez myśliwych), oraz w budownictwie i budowlanych pracach wykończeniowych.
atestacja - badania laboratoryjne i pomiary geodezyjne wykonywane nowym sprzętem na zalegalizowanej krajowej bazie długościowej. Świadectwo atestacji zawiera poprawki dla danego egzemplarza.
Atestacja obejmuje wyznaczenie:
sprawdzenie i rektyfikację sprzętu pomocniczego
sprawdzenie i regulację częstotliwości wzorcowych
stałej dodawania dalmierza
wyznaczenie poprawek do wskazań fazomierza
określenie dokładności pomiaru długości dalmierzem
Przy badaniu dalmierza osiąga się dokładności 5·10-6 (0, 5 mm/km).
Zalegalizowana krajowa baza długościowa znajduje się w Polsce na lotnisku Bemowo.
komparacja - Polega na sprawdzeniu czy parametry ustalone przy atestacji nie uległy zmianie. Wykonywana po naprawie układu optycznego oraz na początku i na końcu sezonu pomiarowego, a ponieważ sezon pomiarowy trwa cały rok, więc warunek ostatni nie jest zwykle wykonywany.
Okresowe sprawdzanie - polega na tym, że każdy mierzący np. geodeta, obiera sobie w terenie odcinek kontrolny np. o długości 800 m.
*pomiar wyjściowy- 6 pomierzonych długości po atestacji lub komparacji
D1+D3+D5-D0 ≤ 0,02m
D2+D5 -D0 ≤ 0,02m
D1+D4 -D0 ≤ 0,02m
D1+D3 -D2 ≤ 0,02m
D3+D5 -D4 ≤ 0,02m
*pomiary kontrolne - minimum 1x w miesiącu
po pierwszym miesiącu: D0', D1', D2', D3', D4', D5'
po dwóch miesiącach: D0'', D1'', D2'', D3'', D4'', D5''
D0 - D0' = Δ0'; D0 - D0'' = Δ0''
D1 - D1' = Δ1'; D1 - D1'' = Δ1''
……………... ……………….
D5 - D5' = Δ5'; D5 - D5'' = Δ5''
Δi ≤ 2ms dwukrotny błąd standardowy
GGs 14 Charakterystyka map tematycznych
Mapy tematyczne:
- opisują wybrane elementy środowiska geograficznego i określone procesy lub zjawiska przyrodnicze i społeczno - gospodarcze;
- są opracowaniami kartograficznymi eksponującymi jeden lub kilka wybranych elementów treści map ogólnogeograficznych bądź określone procesy lub zjawiska przyrodnicze i społeczno - gospodarcze;
Do opracowania map tematycznych wykorzystuje się mapę zasadniczą oraz mapy topograficzne.
Mapy tematyczne występują w skalach od 1:250 do 1:500 000
Kryteria doboru skali mapy to:
- przeznaczenie i rola mapy
- czytelność mapy
- szczegółowość mapy
Dla map tematycznych przyjmuje się odwzorowanie kartograficzne, matematyczną powierzchnię odniesienia i układ współrzędnych map stanowiących tło treści tematycznej.
Mapy tematyczne dzielą się na 2 zespoły map a zespoły dzielą się na grupy:
mapy społeczno - gospodarcze
- mapy gospodarcze
- mapy społeczne
mapy przyrodnicze
- mapy fizjograficzne
- mapy sozologiczne
Mapy gospodarcze - ilustrują jakościowe i ilościowe zagospodarowanie terenu.
Mapy społeczne - ilustrują określone zagadnienia z zakresu zjawisk i stosunków demograficznych, charakterystyki warunków socjalno 0 bytowych oraz ich powiązań ze strukturą zagospodarowania przestrzennego.
Mapy fizjograficzne - ilustrują zagadnienia z zakresu charakterystyki rzeźby terenu, budowy geologicznej, wód podziemnych i powierzchniowych, gleb, klimatu itd
Mapy sozologiczne - ilustrują jakościowe i ilościowe zaburzenia zanieczyszczeń, zniszczeń, skażeń środowiska
Klasyfikację map
Mapy TEMATYCZNE |
Społeczno-gospodarcze |
Gospodarcze |
Mapa zasadnicza |
|
|
|
Podstawowego zagospodarowania terenu |
|
|
|
Uzbrojenia terenu |
|
|
|
Komunikacji |
|
|
|
Gospodarki mieszkaniowej |
|
|
|
Przemysłu |
|
|
|
Rolnictwa |
|
|
|
Usług |
|
|
|
Swobody dyspozycyjnej terenu |
|
|
Społeczne |
Demograficzne |
|
|
|
Wybranych elementów socjalno-bytowych |
|
|
|
Patologii społecznych |
|
Przyrodnicze |
Fizjologiczne |
Geologiczne |
|
|
|
Rzeźby terenu |
|
|
|
Hydrograficzne |
|
|
|
Klimatu |
|
|
|
Glebowe |
|
|
|
Szaty roślinnej |
|
|
|
Świata zwierzęcego |
|
|
Sozologiczne |
Zagrożenia środowiska |
|
|
|
Ochrony środowiska |
GGs 15 Funcje realizowane przez oprogramowanie GIS
SYSTEM INFORMACJI GEOGRAFICZNEJ (GIS) system pozyskiwania, przetwarzania, weryfikowania, integrowania danych, które są przestrzennie odniesione do Ziemi.
Obejmuje zazwyczaj bazę danych przestrzennych i odpowiednie oprogramowanie.
Oprogramowanie GIS
Do oprogramowani GIS zaliczamy każdy program zawierający funkcje wprowadzania, gromadzenia, analizowania oraz wizualizacji danych geoprzestrzennych.
Oprogramowanie GIS staje się coraz bardziej wyspecjalizowaną gałęzią przemysłu komputerowego, zawierającą szereg aplikacji, często specjalnie zaprojektowanych na potrzeby konkretnej branży (administracji, przemysłu, transportu).
Główne funkcje programów GIS:
Przeglądanie danych
Tworzenie danych (budowa i rozszerzanie bazy danych)
Edycja danych (modyfikowanie danych)
Gromadzenie danych
Integracja danych z różnych źródeł
Transformacja (np. przekształcenie układu współrzędnych)
Zapytania (wyniki selekcji danych)
Analiza (uzyskiwanie nowej informacji z oryginalnych danych)
Tworzenie map
32.Funkcje GIS
a) Zapis (gromadzenie i organizowanie) informacji o położeniu obiektów i topologii oraz atrybutach - Układ współrzędnych-> zapis wektorowy / rastrowy-> topologia
b) Wyszukiwanie informacji o położeniu obiektów i ich cechach ->selekcja graficzna
/ atrybutowa-> analizy
c) Przeprowadzanie analiz w celu wyznaczania relacji przestrzennych i atrybutowych
- łączenia warstw, selekcja, buforowanie , analizy sieciowe
d) Opracowywanie map - Definiowanie / transformacja układu współrzędnych, wektoryzacja, analizy, wizualizacja, przygotowanie do druku
GGs16. Generalizacja Kartograficzna: pojęcia i rodzaje
Generalizacja kartograficzna, generalizacja mapy, uogólnienie mapy (łac. generalis - powszechny, ogólny) - w kartografii proces zmniejszania szczegółowości mapy podczas prac redakcyjnych związanych ze zmniejszaniem skali mapy.
Generalizacja kartograficzna - uzasadniony dobór i uogólnienie elementów treści mapy zależnie od jej treści i przeznaczenia.
O generalizacji decyduje, oprócz skali, także przeznaczenie mapy. Np. treść mapy ściennej, którą ogląda się z dużej odległości, podlegać będzie większej generalizacji niż atlasu samochodowego w tej samej skali.
Generalizacja polega m.in. na upraszczaniu rysunku obiektów geograficznych (np. przebiegu linii brzegowej), stosowaniu różnego rodzaju symboli przedstawiających złożone struktury przestrzenne i ich cechy. Celem generalizacji jest dostosowanie mapy do danych potrzeb, zwiększenie jej czytelności itp.
Istnieją dwa główne rodzaje generalizacji:
ilościowa (pominięcie mniej istotnych elementów mapy):
generalizacja formy (odległości, kształtu - uproszczenie kształtu; np. pominięcie niektórych zakrętów drogi, rzeki, uproszczenie przebiegu granicy)
generalizacja treści (zmniejszenie ilości znaków na mapie; np. pominięcie niektórych miast, rzek, mniej ważnych dróg)
jakościowa (uogólnienie pojęć przedstawianych na mapie):
symbolizacja (np. na mapie w dużej skali miejscowości oznaczone będą zasięgiem zabudowy, w mniejszej skali - sygnaturą koła lub kwadratu)
grupowanie (np. połączenie lasów liściastych, iglastych i mieszanych w jedną kategorię)
zmiana ujęcia zjawiska
Generalizacja kartograficzna uważana jest za proces subiektywny, wymagający od kartografa dobrej znajomości tematu przedstawionego na mapie.
GGs 18 Zastosowanie krzywej przejściowej w drogownictwie
Krzywa przejściowa jest wprowadzana, aby dać szansę kierowcy na odpowiednią reakcję na pokonanie łuku- najczęściej łuku kołowego.
Zastosowanie krzywej przejściowej ma na celu stworzenie łagodnego przejścia między dwoma elementami trasy o różnej krzywiźnie. W budownictwie drogowym, jako krzywą przejściową stosuje się najczęściej klotoidę.
Wprowadza się ją w celu rozłożenia siły odśrodkowej. Na krzywej tej następuje wzrost siły odśrodkowej od 0 do max.
Zadaniem krzywej przejściowej jest realizacja przejścia z krzywizny zero na prostej do maksymalnej, stałej na łuku kołowym.
Generalnie za kierunek podstawowy przyjmuje się linię prostą, jednak w praktyce, głównie ze względu na ukształtowanie terenu, jest to niemożliwe. Kierunki prostoliniowe czynią jazdę monotonną, działają nużąco na kierowcę, a tym samym wpływają niekorzystnie na bezpieczeństwo jazdy. Wielu projektantów dróg kołowych uznało, że należy ograniczyć ich stosowanie. Zaproponowano stosowanie ogólnych gładkich krzywych przejściowych czy też wielomianowych tras drogowych.
4 elementy określają geometrię krzywej przejściowej:
L - długość klotoidy
R - promień klotoidy
a - współczynnik proporcjonalności
Τ - kąt zwrotu stycznej klotoidy
GGs 19 Opracowanie osnowy realizacyjnej w układzie lokalnym
Zakładane osnowy realizacyjne powinny być związane z państwowym układem współrzędnych, jednakże dopuszczalne jest zastosowanie układów lokalnych.
Instrukcje techniczne O-1 i G-3.1 dopuszczają stosowanie lokalnego układu dla zakładanej osnowy realizacyjnej przy spełnieniu określonych warunków.
Jednym z nich jest włączenie istniejących na obszarze inwestycji i w jej pobliżu punktów geodezyjnej osnowy poziomej do zakładania osnowy. Punkty te później wykorzystuje się, jako punkty wiążące przy transformacji współrzędnych z układu lokalnego na obowiązujący układ państwowy.
Osnowę realizacyjną w układzie lokalnym projektuje się w formie ramy geodezyjnej, która jest osnową w postaci prostokąta związanego geometrycznie z układem osi konstrukcyjnych obiektu budowlanego.
Jak każdy układ lokalny rama geodezyjna ma zdefiniowany początek układu oraz orientację osi. Jeżeli do układu włączono punkt (lub punkty) osnowy państwowej to jest on przyjmowany, jako punkt początkowy.
Linie ramy powinny być odsunięte na zewnątrz od skrajnych osi realizowanego obiektu od kilkudziesięciu cm do kilku metrów.
Punkty główne powinno się stabilizować słupami betonowymi z metalowymi płytkami na głowicach.
Opracowanie osnowy realizacyjnej w układzie lokalnym przebiega w następujących etapach:
- przyjęcie początku układu oraz określenie orientacji osi,
- określenie wymiarów projektowanej sieci,
- przybliżone wytyczenie punktów ramy, a następnie precyzyjny pomiar boków i kątów,
- obliczenie poprawek i ich odłożenie.
Obliczone poprawki (trasowania) odkłada się na płytkach i stabilizuje się nacięciami, jako ostateczne punkty główne ramy.
Gdy jest wymagana duża dokładność, wyrównanie obserwacji realizuje się metodą ścisłą.
W wyrównaniu sieci metodą parametryczną za współrzędne przybliżone przyjmuje się współrzędne projektowane punktów, a uzyskane z wyrównania poprawki są poprawkami (trasowania) do tychże współrzędnych projektowanych.
Poprawki tyczenia (trasowania) mają korygować współrzędne punktu tyczonego tak, aby otrzymać współrzędne projektowane, więc zmienia się znak poprawek z tak przeprowadzonego wyrównania. Po wprowadzeniu tych poprawek do punktu wstępnie wytyczonego na płytce znaku uzyskuje się punkt o współrzędnych projektowanych.
to już nie…..
Jako główne kryteria oceny dokładności poziomej osnowy realizacyjnej przyjmuje się błąd średni po wyrównaniu długości najsłabiej wyznaczonego boku. Pomocniczymi kryteriami dokładności są błędy średnie obserwacji, błędy średnie położenia punktów oraz parametry elipsy błędów średnich położenia punktów.
Kryterium dokładności wysokości osnowy realizacyjnej stanowi błąd średni niwelacji po wyrównaniu wyrażony w mm na 1 km linii niwelacyjnej. Pomocniczym kryterium dokładności jest błąd średni wysokości punktów po wyrównaniu.
Położenie (poziome i wysokościowe) punktów osnowy realizacyjnej wyznacza się z dokładnością nie niższą niż dokładność punktów osnów pomiarowych, która zapewni zachowanie wymaganej dokładności tyczenia.
Dokładność pomiarów liniowych i kątowych osnowy realizacyjnej nie może być mniejsza od dokładności określonej dla osnów pomiarowych, tj. błąd średni pomiaru odległości md ≤ 0,01 m + 0,01 m/km, błąd średni pomiaru kierunku mk ≤ 6"(20cc), błąd średni pomiaru różnic wysokości mΔH ≤ 20 mm/km (przy wyznaczaniu wysokości w układzie państw.)
Repery I-rzędu osnowy realizacyjnej niweluje się za pomocą instrumentu z mikrometryczną płytką płaskorównoległą i z użyciem taśm inwarowych z taką dokładnością, aby odchyłka przewyższenia miedzy reperem nawiązania (w państwowym układzie wysokości) i reperem I rzędu nie przekroczyła ± 5 mm.
Osnowę realizacyjną wyrównuje się metodą najmniejszych kwadratów. W przypadku, gdy dokładność osnowy realizacyjnej przewyższa dokładność osnowy nawiązania, osnowę realizacyjną wyrównuje się z odrzuceniem bezbłędności punktów nawiązania.
GGs 20 Europejski układ odniesienia EUREF oraz jego realizacja w Polsce.
ITRS to Międzynarodowy Ziemski system Odniesienia. Pewną wadą tego systemu jest ciągła zmiana współrzędnych punktów spowodowana tektoniką płyt, dlatego postanowiono wprowadzić dla Europy system odniesienia, który będzie się poruszał wraz z płytą euroazjatycką.
Europejski Ziemski System Odniesienia ETRS'89 jest zgodny z ITRS na epokę 1989.0 przy założeniu stałości płyty euroazjatyckiej. Realizacją systemu ETRS'89 jest układ ETRF'89 i stanowi on układ odniesienia dla większości państw europejskich.
Od 1997 układ ten realizowany jest przez sieć stacji permanentnych EPN.
Rozszerzeniem ETRF'89 na obszar Polski, w wyniku kampanii pomiarowej EUREF POL'92 jest układ EUREF-89.
I kampania - EUREF POL'92
II kampania - EUREF POL'2001
11 PUNKTÓW (zerowego rzędu) sieci EUREF - POL na terenie Polski
Przenoszenie na obszar Polski geodezyjnego układu ETRF'89 odbywać się będzie poprzez sieć stacji referencyjnych systemu ASG-EUPOS i punktów podstawowej osnowy geodezyjnej EUREF-POL, POLREF i EUVN.
Połączenie stacji ASG-EUPOS z podstawową osnową kraju EUREF - POL, POLREF, EUVN stanowi zagęszczenie sieci EPN i realizuje stabilny, jednolity układ odniesienia zgodny z ETRS'89
Na układzie EUREF-89 oparte są następujące układy współrzędnych:
Układ „1992”
Układ „2000”
Nie uwzględniając lokalnych zmian tektonicznych, a biorąc pod uwagę jedynie ruchy płyt kontynentalnych, można uważać, że współrzędne ETRF-89, sztywno związane z naszym kontynentem będą się zmieniały względem ITRF w granicach 1-3 cm rocznie.
w
ΔH
S0
I
II
200m
500m
800m
B
A
D3
D1
D5
D2
D4
Wyszukiwarka
Podobne podstrony:
zagadnienia na obrone, do druku kierunkowe, 2981550897242 kod do zmywacza
Zagadnienia na Obronę Licencjatu – Zagadnienia z Specjalności pedagogika opiekuńczo wychowawcza z
opracowane zagadnienia na ped.specj, pedagogika specjalna
Zagadnienia na zaliczenie do Jainskiego
Psychologia społeczna- zagadnienia na egzamin, APS, Pedagogika Specjalna, Psychologia społeczna
zagadnienia na obronę(2), studia magisterka, studia magisterka semestr IV
7 PODCZERWIEŃ, Inżynierka, zagadnienia na obronę, download(1)
Zagadnienia na Obronę Magisterską Zagadnienia z metodologii?dań pedagogicznych
ŁASZCZ - 30 zagadnień na obronę, Administracja
zagadnienia II, zagadnienia na obronę
Zagadnienia na obronę
Zagadnienia na Obronę Magisterską – Zagadnienia Ogólne
Zagadnienia na obrone prac dyplomowych (2)
4.1 OPTYKA LASER, Inżynierka, zagadnienia na obronę, download(1)
więcej podobnych podstron