51
Elektronika dla Wszystkich
Do czego to służy?
Akwariowy dozownik pokarmu nie jest tylko
przysłowiowym bajerem. Ale staje się tak
tylko wówczas, gdy część mechaniczna jest
niezawodna. Myślę, że udało mi się zapro-
jektować konstrukcję mogącą pracować dłu-
go i niezawodnie.
Zaproponowana koncepcja zawiera tylko
prosty układ sterujący silnikiem dozownika.
Nie pokusiłem się o zaprojektowanie układu
podającego pokarm o określonych godzi-
nach. Zrobiłem tak, ponieważ wiem, że każ-
dy inaczej go sobie wyobraża. Jedni preferu-
ją proste rozwiązania, bez wyświetlaczy
i rzędów nachalnie migających LED-ów. In-
ni kochają LED-y i nie wyobrażają sobie
układów bez nich. Jeszcze inni preferują roz-
wiązania z mikroprocesorem na pokładzie.
Dla jednych będzie to pojedynczy układ, dla
drugich część „kombajnu” sterującego całym
akwarium. Mój projekt charakteryzuje się
elastycznością pozwalającą na łatwą współ-
pracę z różnego typu układami.
Jak to działa?
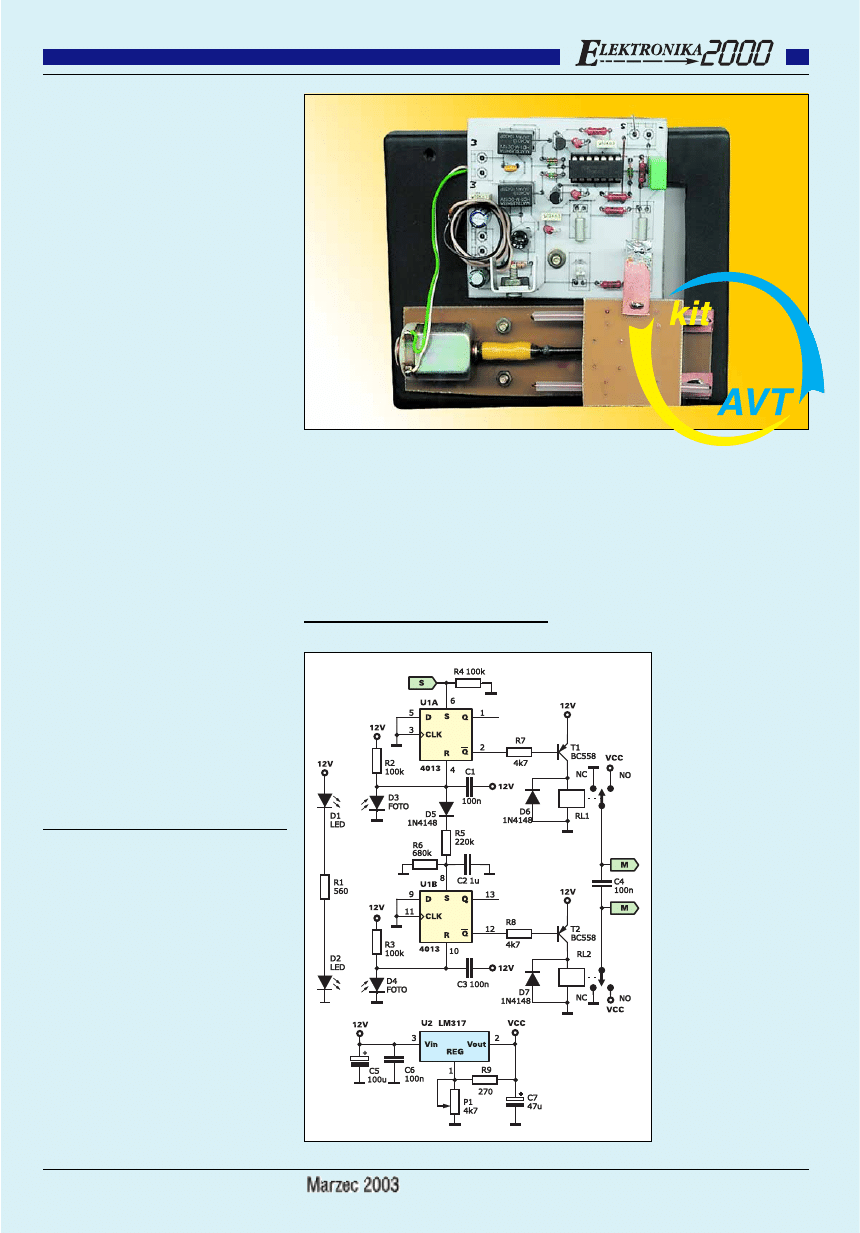
Schemat ideowy przedstawiony został na ry-
sunku 1. Dozownikiem pokarmu steruje się
poprzez wejście oznaczone na schemacie li-
terą S. Podanie na wejście impulsu dodatnie-
go spowoduje wydzielenie porcji pokarmu.
Impuls ten nie powinien być zbyt długi. Do-
brze by nie trwał dłużej niż 1 sekundę.
Po podaniu na wejście S dodatniego im-
pulsu, przerzutnik U1A zmieni stany na swo-
ich wyjściach na przeciwne. Zaowocuje to
włączeniem przekaźnika RL1 i włączeniem
silnika podłączonego do wyjść oznaczonych
na schemacie literą M. Do tej pory transoptor
szczelinowy zbudowany z diod D2 i D4 był
przesłonięty przez ruchomą platformę po-
rcjującą pokarm. Załączenie silnika powodu-
je przesunięcie platformy aż do momentu za-
słonięcia drugiego transoptora szczelinowe-
go zbudowanego na diodach D1 i D3. Będzie
to jednoznaczne z podaniem stanu wysokie-
go na wejście reset przerzutnika U1A i za-
trzymaniu pracy silnika.
Przez elementy R2, D5 i R5 ładowany jest
teraz kondensator C2. Gdy napięcie na nim
osiągnie wartość odpowiednią do zaakcepto-
wania przez wejście SET przerzutnika
U1B jako stan wysoki – włączy się przeka-
źnik RL2. Trwa to około 0,5 sekundy i ma
służyć zwiększeniu komfortu pracy silnika.
Silniki elektryczne bardzo bowiem nie lubią
szybkich zmian biegunowości zasilania. Po
tym krótkim wytchnieniu (również dla stabi-
lizatora U2) silnik zacznie pchać platformę
z powrotem. Platforma zatrzyma się, gdy
znów przesłoni transoptor zbudowany z diod
D2 i D4 – co zakończy pracę sterownika.
Z obiektywnych przyczyn układ zasilany
jest napięciem 12V. Jest to napięcie zdecydo-
wanie zbyt wysokie jak dla popularnych sil-
ników z zabawek zasila-
nych 3V. Dlatego też po-
stanowiłem, że napięcie
do silnika dostarczać bę-
dzie stabilizator. Dosko-
nale do tego celu nadaje
się popularny stabilizator
o dobieranym napięciu
wyjściowym LM317.
Można ustawić napięcie
odpowiednie dla posiada-
nego silniczka. W moim
modelu silnik zasilany jest
najniższym oferowanym
przez stabilizator napię-
ciem 1,25V.
Aby przesunąć platfor-
mę z jednego skrajnego
położenia w drugie, silni-
czek potrzebuje niecałej
sekundy. Następnie około
0,5 sekundy przerwy i ko-
lejna sekunda na powrót
do stanu spoczynku.
W czasie tej krótkiej
(z przerwą) pracy, silni-
czek pobiera około
700mA prądu.
Ciąg dalszy na stronie 61.
2
2
6
6
5
5
7
7
+
+
AA
AA
kk
kk
w
w
w
w
aa
aa
rr
rr
ii
ii
oo
oo
w
w
w
w
yy
yy
dd
dd
oo
oo
zz
zz
oo
oo
w
w
w
w
nn
nn
ii
ii
kk
kk
pp
pp
oo
oo
kk
kk
aa
aa
rr
rr
m
m
m
m
uu
uu
Rys. 1 Schemat ideowy
Ciąg dalszy ze strony 51.
Stanowi to znaczne obciążenie dla stabili-
zatora, w którym przez tę krótką chwilę wy-
twarza się moc 7,5W [(12V – 1,25V)
* 700mA]. Jednak przez tak krótki czas pra-
cy stabilizator nawet bez żadnego radiatora
nie nagrzewa się do niebezpiecznej tempera-
tury.
Część mechaniczna
Budowę części mechanicznej obra-
zuje najlepiej sam model. Jeden rzut
oka na model mówi więcej niż tysiąc
słów opisu. Dlatego też skoncentruję
opis na najważniejszych szcze-
gółach.
Najbardziej krytyczną częścią
układów wykorzystujących silniki
elektryczne jest przeniesienie napę-
du. W domowych warunkach trudne
jest to do zrealizowania, szczególnie
jeśli potrzebne jest duże przełożenie
(jak w naszym przypadku). Przed
problemem tym stawałem już wcze-
śniej i opracowałem bardzo prosty
i niezawodny sposób. Duże przełoże-
nie i znaczną siłę uzyskać można sto-
sując śrubę i nakrętkę. Rozwiązanie
takie zawsze do tej pory zdawało eg-
zamin, a układy o nie oparte działają
bezawaryjnie (np. jako rygiel zamka
szyfrowego). Dlatego też i tym ra-
zem zastosowałem przełożenie
z długą śrubą M3 (40mm) i nakrętką.
Śruba z odciętym łebkiem zamo-
cowana jest do wirnika silnika (od
strony obcięcia). Aby dopasować średnicę
wirnika do średnicy śruby M3, na wirnik na-
łożona została koszulka termokurczliwa.
Śrubę i wirnik łączy plastikowa tulejka. Ca-
łość zalałem Distalem.
Nakrętka umieszczona jest pomiędzy
dwoma kawałkami laminatu. Laminat połą-
czony został dwoma odcinkami przylutowa-
nego do niego drutu. W całej konstrukcji po-
sługiwałem się drutem o średnicy 0,5mm
uzyskanego z gorącej żyły kabla koncen-
trycznego. Ja dysponowałem nakrętką z czę-
ścią okrągłą, którą mogłem umieścić na
wcisk w otworze zrobionym w laminacie.
W przypadku „zwykłej” nakrętki sześciokąt-
nej całość należy zalać Distalem, tak aby
unieruchomić nakrętkę pomiędzy kawałkami
laminatu (rysunek 2). Część ta będzie prze-
suwać platformę porcjującą pokarm.
Platforma wykonana jest z laminatu i sze-
ściu pętli z drutu. Cztery pętle służą do poru-
szania się po prowadnicach, a dwie pozosta-
łe przytrzymują część z nakrętką. Pojemnik
z pokarmem znajduje się nad platformą, jed-
nak jej nie dotyka. Samoistne wysypywanie
się pokarmu powstrzymywane jest więc
przez sam pokarm (rysunek 3). Przesunięcie
się platformy powoduje wysypywanie się po-
karmu z pojemnika do akwarium (rysunek
4). Powrót platformy zatrzymuje ten proces.
Silnik i prowadnice umieszczone są na ka-
wałku laminatu z otworem pod platformą do
przepuszczania pokarmu. Silnik przymocowa-
ny jest drutem. Prowadnice wykonane są z te-
go samego drutu, ale z niezdjętą izolacją. Do
platformy przylutowany jest kawałek lami-
natu przesłaniający transoptory (rysunek 5).
Montaż i uruchomienie
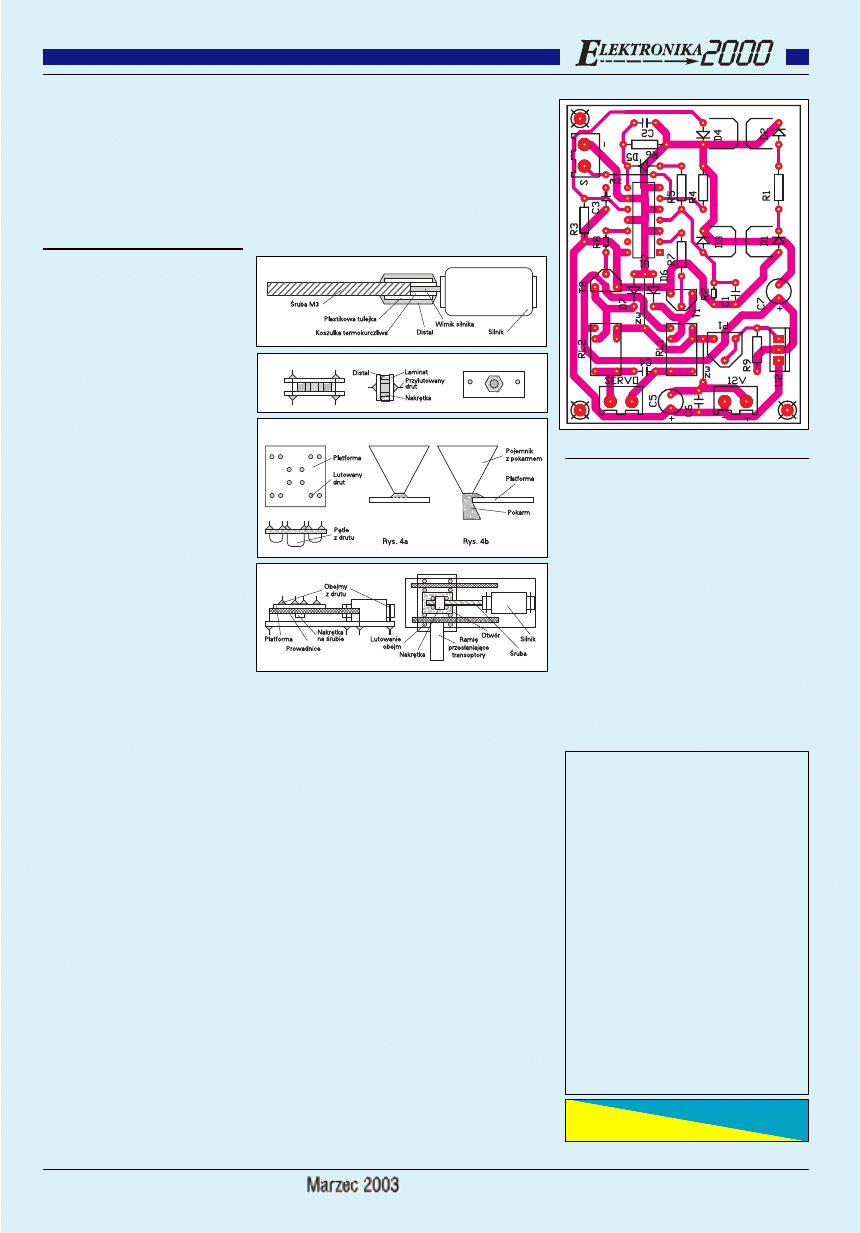
Układ można zmontować na płytce druko-
wanej pokazanej na rysunku 6. Montażu
części elektronicznej dokonujemy w trady-
cyjny sposób. Nie wymaga ona zabiegów
uruchomieniowych, jedynie ustawienia na
wyjściu stabilizatora napięcia jakim zasilany
powinien być silnik.
Układ jest odporny na wszelkiego rodzaju
„nienormalne” sytuacje (przerwy zasilania,
uszkodzenie elementów transoptorów, itp.).
Nie są one w stanie uszkodzić elementów
mechaniki czy spowodować przeciążenia
mogącego doprowadzić do spalenia elemen-
tów. Niebezpieczną sytuację może stworzyć
tylko zablokowanie się silnika „w połowie
drogi”. Zablokowany silnik będzie pobierał
znaczny prąd, co może doprowadzić do
uszkodzenia stabilizatora U2. Można takiej
sytuacji zapobiec, zasilając układ tylko na
czas karmienia. Można też całkiem zrezy-
gnować ze sterowania przez wejście S i ste-
rować układem dozownika poprzez włącza-
nie i wyłączanie zasilania. Wtedy jednak
trzeba między wejście S a plus zasilania
dodać kondensator, np. o wartości 100nF,
tak aby po podaniu zasilania układ sam
startował.
Gdyby czas odsłonięcia był zbyt krótki na
zaserwowanie odpowiednio dużej porcji po-
karmu, można odsuwać platformę kilka razy
z rzędu. Nie można jednak robić tego zbyt
wiele razy – raz za razem. Powoduje to bo-
wiem nadmierne nagrzewanie się stabilizato-
ra U2. Nic też nie zaszkodzi przykręcenie
małego radiatorka, np. takiego jak w modelu.
Dobrego zwymiarowania i precyzji przy
montażu wymaga część mechaniczna. Nie
podaję konkretnych wymiarów, gdyż zależą
one od długości zastosowanej śruby i wielko-
ści silnika. Samą śrubę dobrze jest nasmaro-
wać smarem do maszyn precyzyjnych.
Dariusz Drelicharz
dariuszdrelicharz@interia.pl
61
Elektronika dla Wszystkich
Wykaz elementów
Rezystory
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .560Ω
R2-R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220kΩ
R6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .680kΩ
R7,R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4,7k Ω
R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .270Ω
P1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4,7kΩ PR
Kondensatory
C1,C3,C4,C6 . . . . . . . . . . . . . . . . . . . . . . . . . .100nF
C2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1µF
C5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
C7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47µF/16V
Półprzewodniki
D1,D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .dioda LED
D3,D4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .fotodioda
D5-D7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
T1,T2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC558
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4013
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM317
Inne
REL1,REL2 . . . . . . . .HD1-M-DC12V firmy Matsushita
Płytka ddrukowana jjest ddostępna w sieci
handlowej AAVT jjako kkit sszkolny AAVT-22657.
Rys. 6 Schemat montażowy
Rys. 2
Rys. 3
Rys. 4
Rys. 5
Wyszukiwarka
Podobne podstrony:
AVT 945
avt 730 Dalekosiężny tor podczerwieni
AVT 2727 CYFROWA STACJA LUTOWNICZA
AVT 540 Miniprogramator
AVT 135 Cyfrowa skala częśt
200603avt745 avt 2788 WYKRYWACZ PLUSKIEW, BottomLayerNormal
AVT 2270 Miliwoltomierz
AVT 5094 Reg Temp
AVT 2725 Miernik C
AVT 987 cz2
avt 2808
avt 868 Programowalny zegar z LCD proc 89
AVT 5237
AVT 736 Zasilacz
Projekty AVT
200603avt745 avt 2788 WYKRYWACZ PLUSKIEW, BottomLayerMirror
AVT 5321 Szukacz i tester układów na magistrali I2C
AVT 2146 czujnik przeciwpoż
więcej podobnych podstron