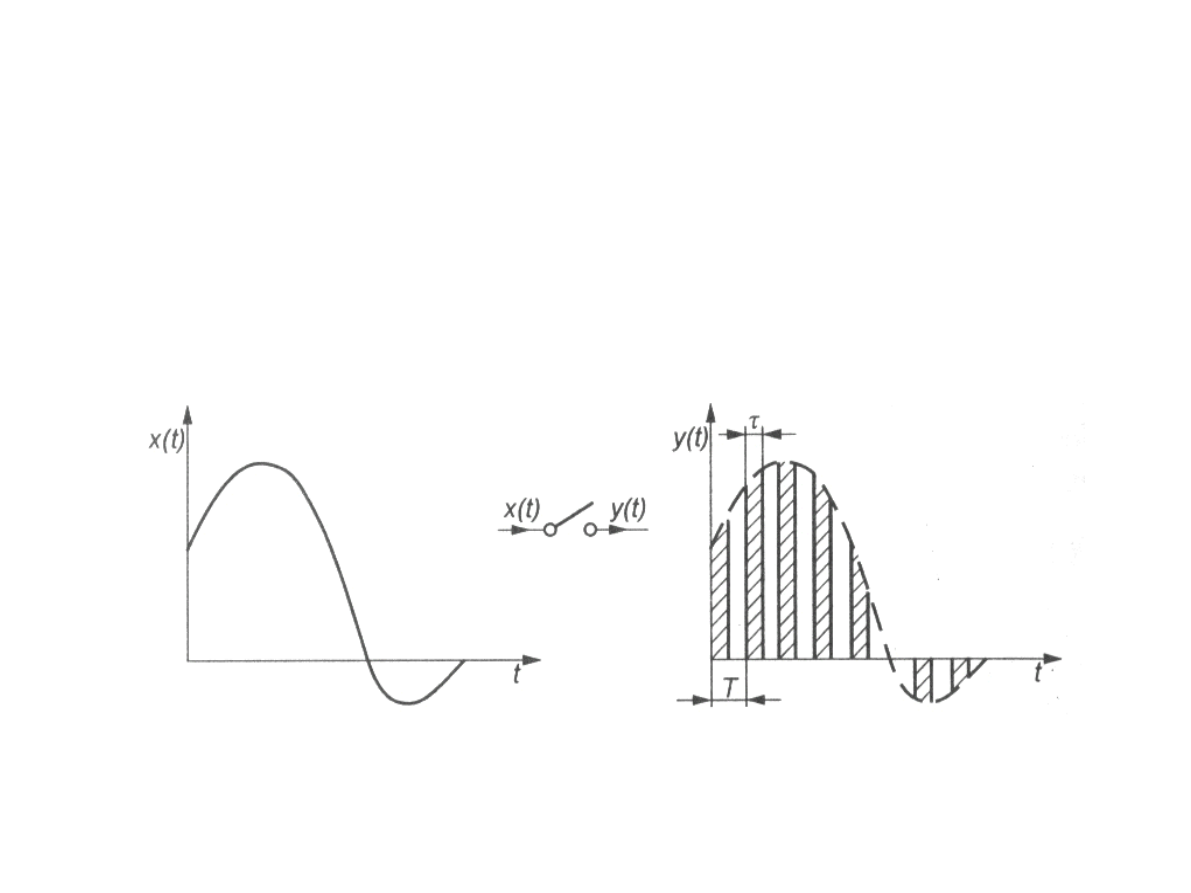
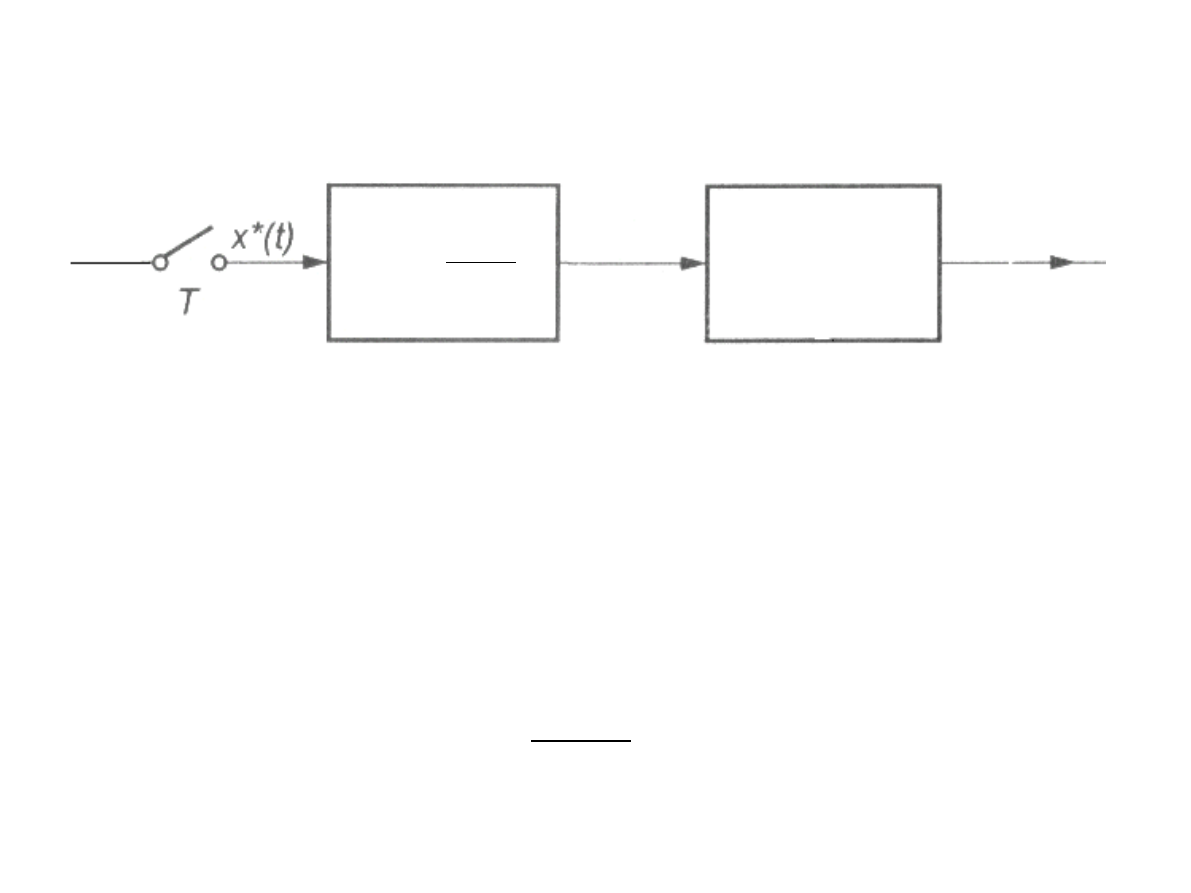
Próbkowanie sygnału
Przetwarzanie sygnału ciągłego w sygnał
impulsowy, przyjmujący niezerowe wartości
tylko w określonych przedziałach czasu.
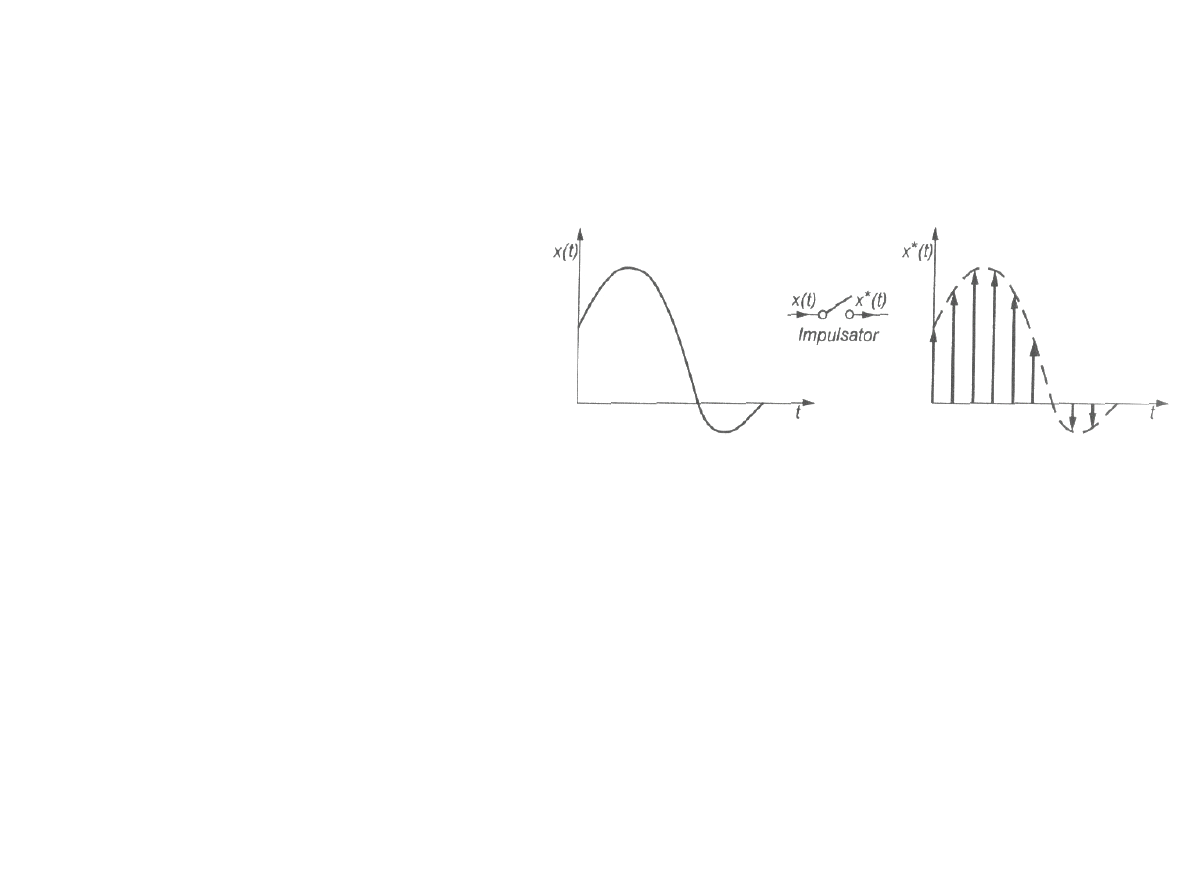
Próbkowanie idealne
x t= xt
T
t
*
T
t=
n=−∞
n=∞
t−nT
x t=xt
n=−∞
n=∞
t−nT
x t=xt
n=0
n=∞
t−nT =
n=0
n=∞
xnTt−nT
*
*

X s=L[ x t]=
n=0
n=∞
xnT L[t−nT]
X s=
n=0
n=∞
xnTe
−nTs
X s=Z[ xt]
z=e
Ts
*
*
*
*
Widmo sygnałów impulsatora idealnego
T
t=
1
T
n=−∞
n=∞
e
jn
s
t
gdzie
s
=
2
T
− pulsacja impulsowaniaw[rad/ sek]
Rozwijając
T
t wszereg Fourieraotrzymujemy:
x t=xt
T
t=
1
T
n=−∞
n=∞
xte
jn
s
t
*
xt= A
e
jn
0
T
−e
− jn
0
T
2j
to:
Jeżeli nawejścieimpusatora podamysygnał sinusoidalny:
x t=
A
T
e
j
0
T
−e
− j
0
T
2j
A
T
n=1
n=∞
[
e
jw
0
n
s
T
2j
−
e
− j
0
n
s
T
2j
]
A
T
n=1
n=∞
[
e
jw
0
−n
s
T
2j
−
e
− j
0
−n
s
T
2j
]
x t=
A
T
n=−∞
n=∞
e
j
0
T
−e
− j
0
T
2j
e
jn
s
T
=
A
T
sin
0
t
A
T
n=1
n=∞
sin
0
n
s
t
A
T
n=1
n=∞
sin
0
−n
s
t
*
*
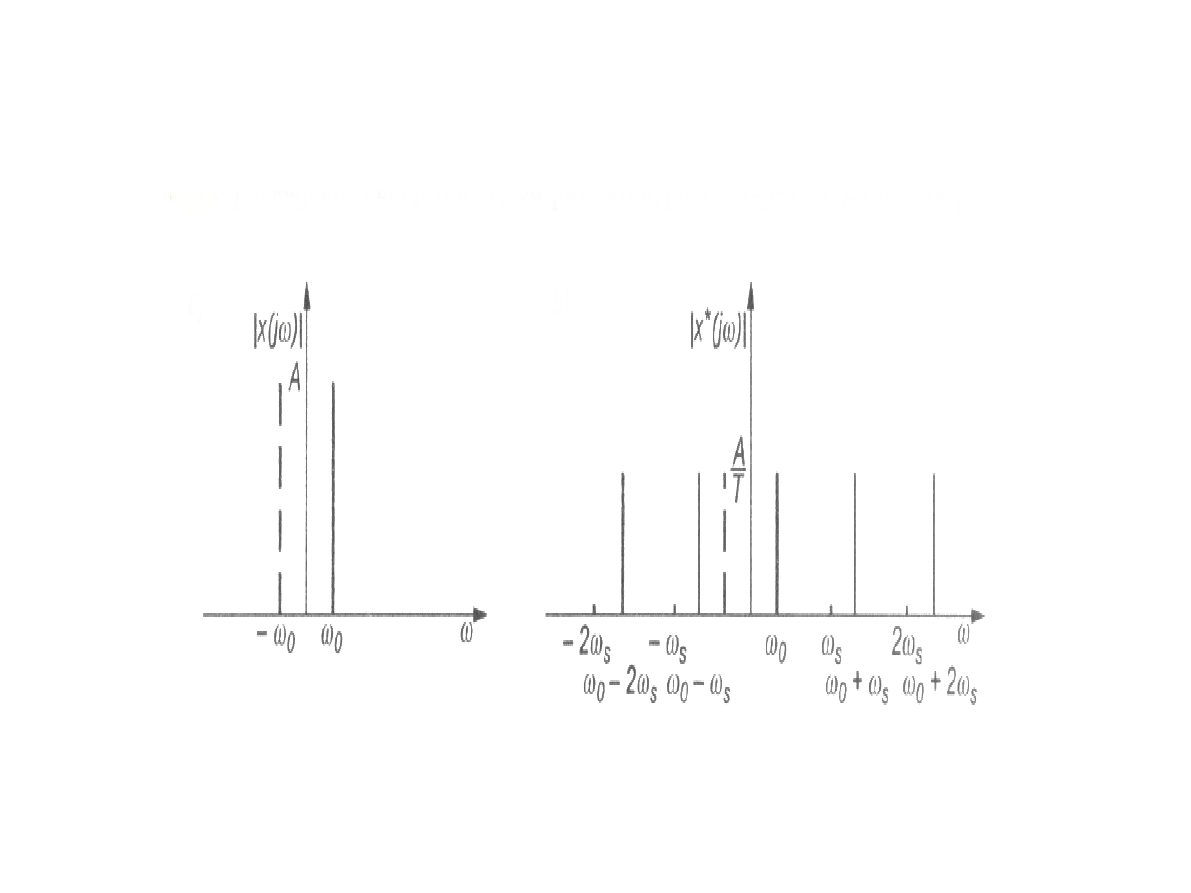
Widmasygnałówwejściowegoi wyjściowego
impulsatora idealnego przywejściusinusoidalnym

X s=L[ x t]=L[
1
T
n=−∞
n=−∞
xte
jn
s
t
]=
1
T
n=−∞
n=∞
X s− jn
s
Na podstawietwierdzeniao przesunięciuwdziedziniezmiennej
zespolonej:
Widać,żetransformatąLaplace' a sygnałuwyjściowego
impulsatora jest funkcjąokresową,awidmoamplitudowe
w funkcji pulsacji sygnałuwejściowegookreślazależność:
∣
X j
∣
=∣
1
T
n=−∞
n=∞
{X j jn
s
}∣
Widmaczęstotliwościoweimpulsatora przyograniczonym
widmiesygnałuwejściowego
*
*
*
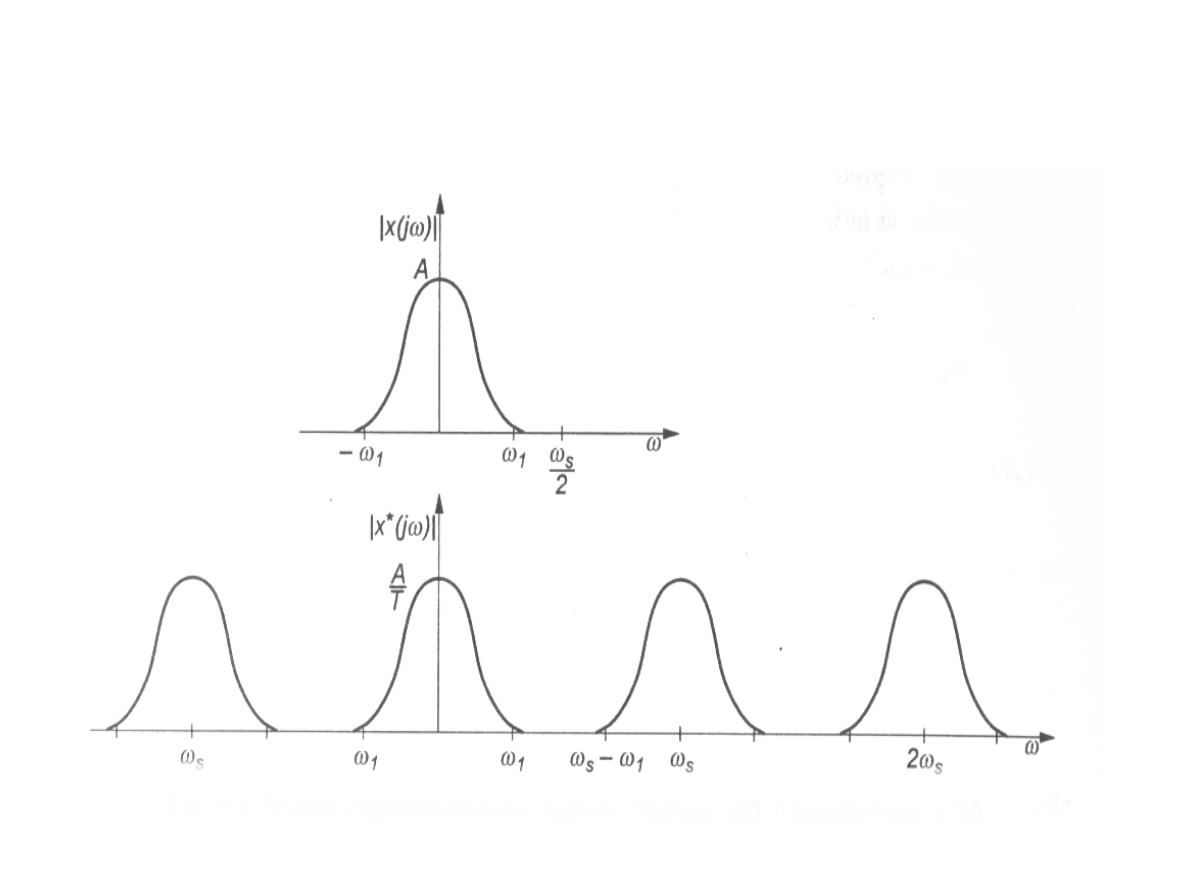
Widmaczęstotliwościoweimpulsatora przyograniczonym
widmiesygnałuwejściowego
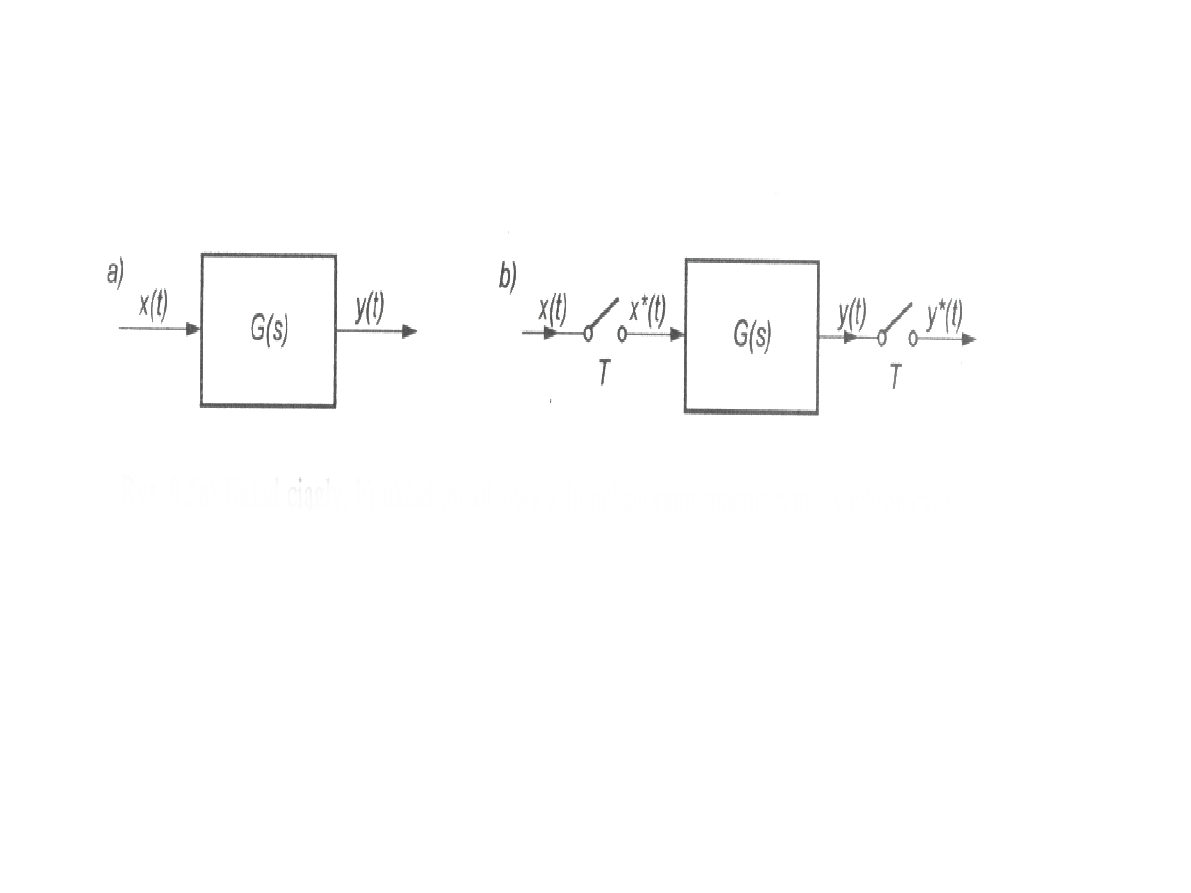
Układciągłyi dyskretny
Transmitancja impulsowa
Y s=Gs X s
*
*
Transmitancja impulsowa cd.
Y s=
1
T
n=−∞
n=∞
Y s jn
s
Y s=
1
T
n=−∞
n=∞
∣
G s jn
s
X s jn
s
∣
Ponieważ X s jest funkcjąookresie j
s
:
Y s= X s
∣
1
T
n=−∞
n=∞
Gs jn
s
∣
*
*
*
*
*
*
Transmitancja impulsowa cd.
przezanalogiędozależności X s=
1
T
n=−∞
n=∞
X s jn
s
G s=
1
T
n=−∞
n=∞
Gs jn
s
,a zatem:
Y s=X sG s,
wprowadzając zaśzmienną zespoloną zotrzymujemy:
Y z= X zGz
TransmitancjaoperatorowaG z=
Y z
X z
definiuje stosunek
transformatyZ sygnałuwyjściowegodo transformatyZ
sygnałuwejściowego, przyzerowychwarunkachpoczątkowych
*
*
*
*
*
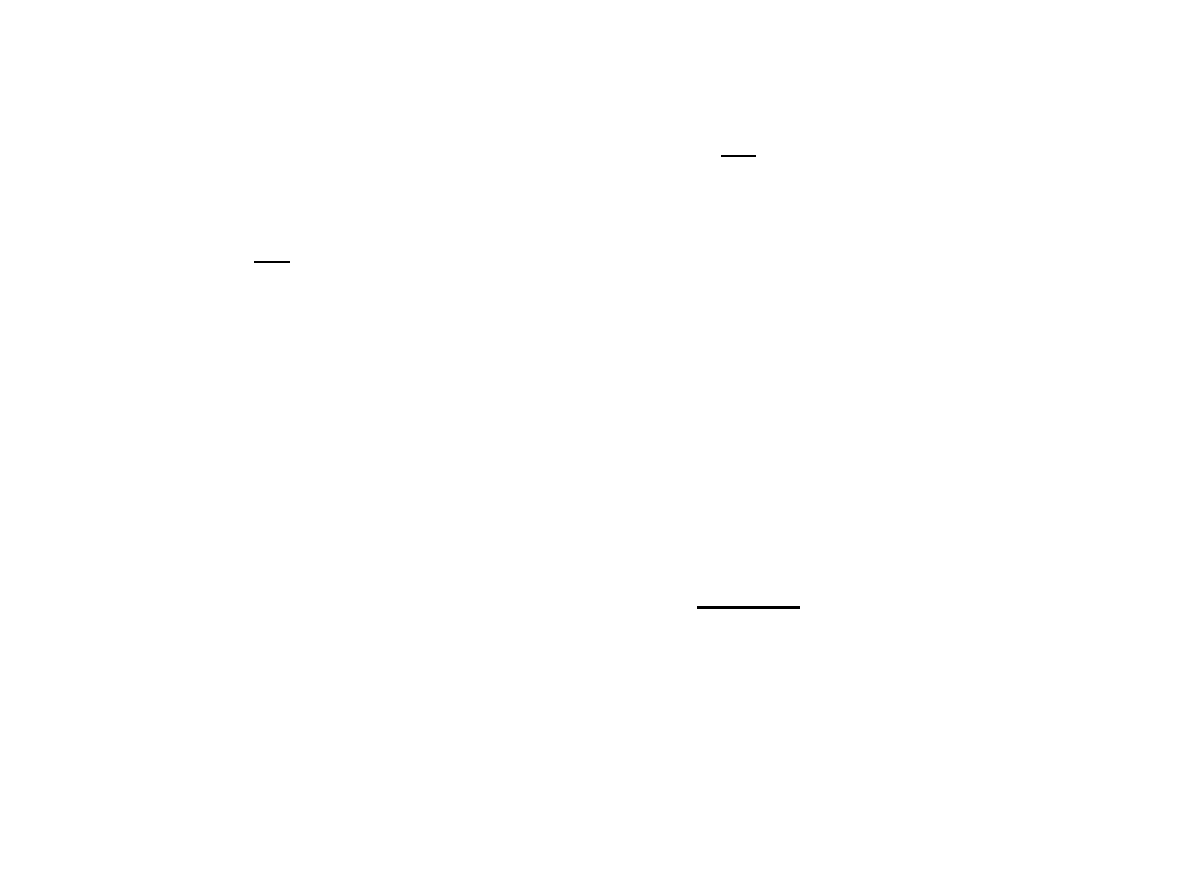
Transmitancjeimpulsoweukładówzłożonych
Układy połączoneszeregowo
Y
1
s=G
1
s X s
Y
1
s=G
1
s X s
Y
2
s=G
2
sY
1
s
Y
2
s=G
2
sY
1
s
Y
2
s=G
2
sG
1
s X sY z=G
2
zG
1
z X z
Gz=G
1
zG
2
z
*
*
*
*
*
*
*
*
*
*
*
*
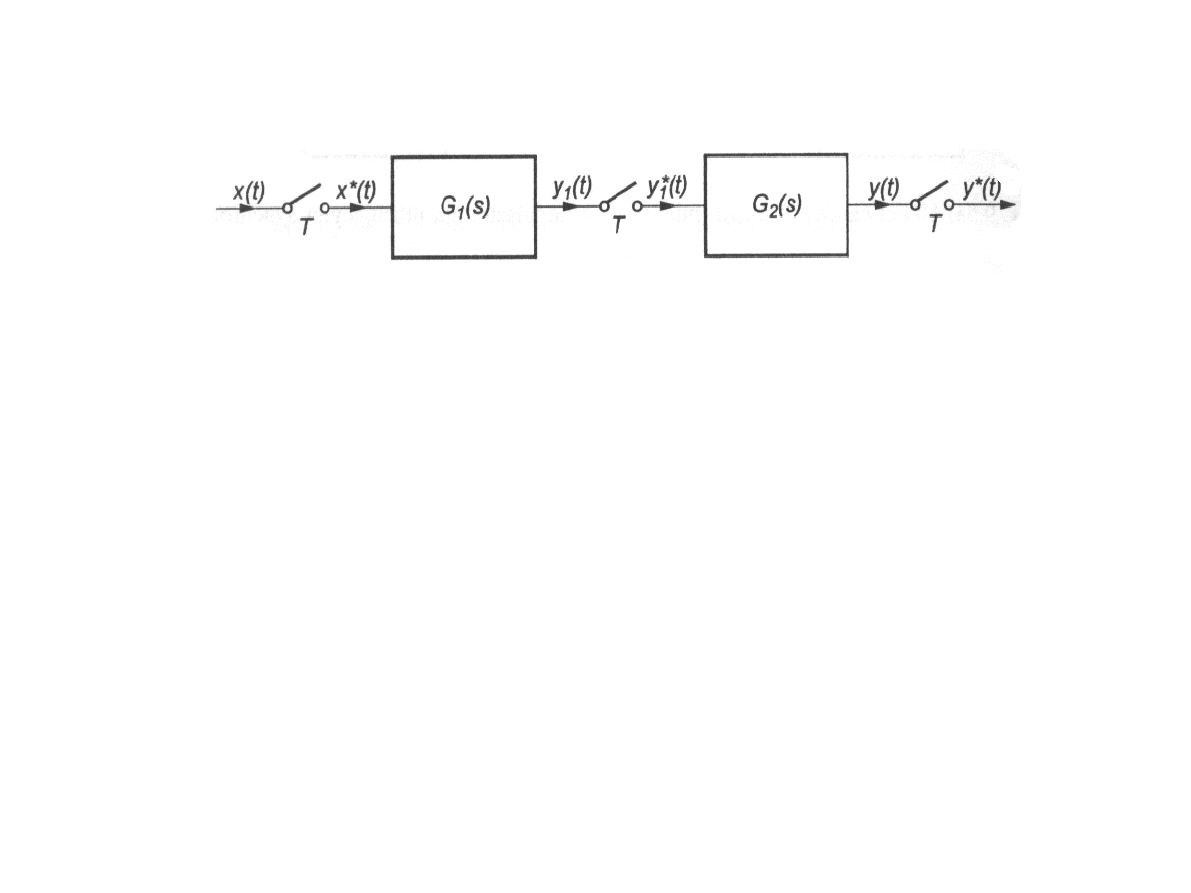
Y s=G
2
sG
1
s X s
Y s=[G
2
SG
1
S X s] =[G
2
sG
1
s] X s
Y z=Z{[G
1
sG
2
s]}X z
Gz=Z[G
1
sG
2
s]
Transmitancjeimpulsoweukładówzłożonych
Układy połączoneszeregowocd.
*
*
*
*
*
*
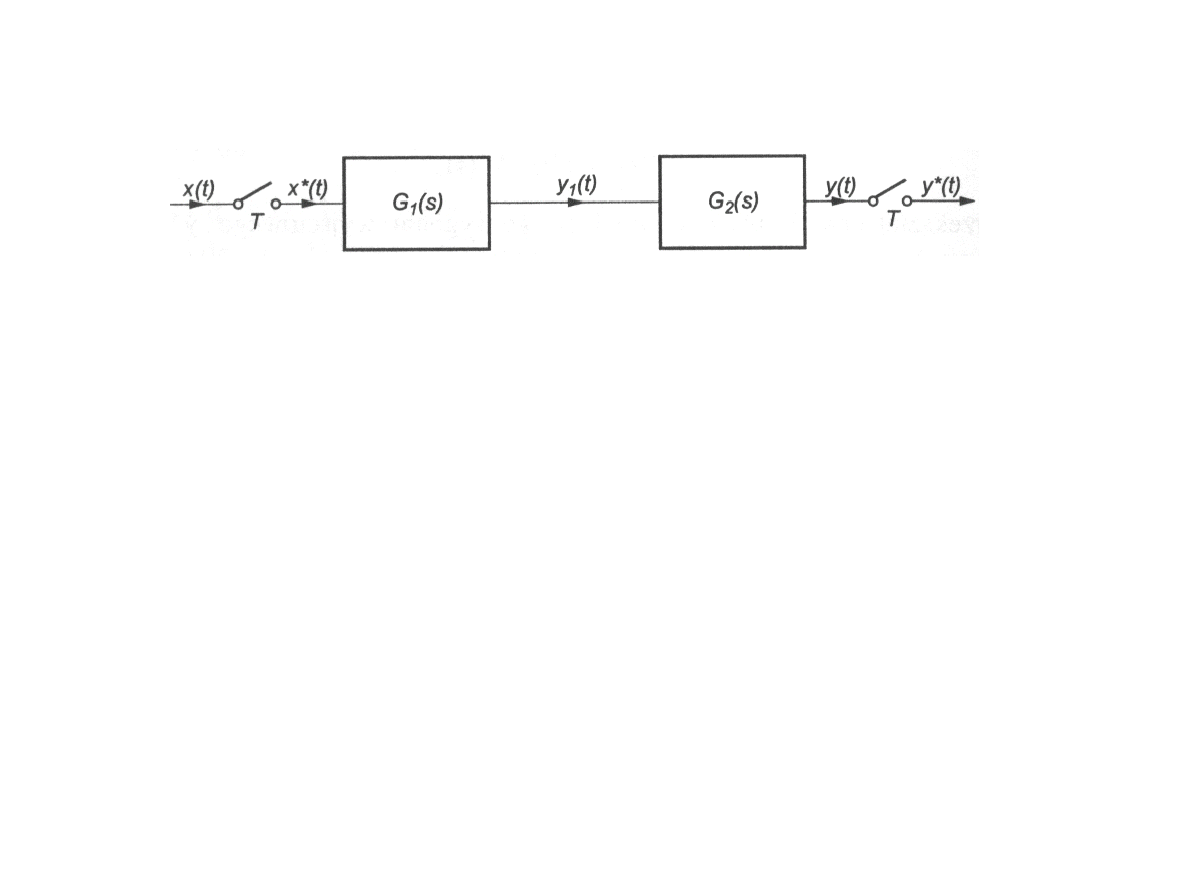
Transmitancjeimpulsoweukładówzłożonych
Układ zamknięty
Es= X s−Gs Hs E
¿
s ,
E s= X s−[Gs Hs] E s
Y s=Gs E s
Y s=G s E s
Y sY s{Gs Hs} =G s X s
Y zY zZ[Gs Hs]=Gz X z
G
z
z=
Y z
X z
=
G z
1Z[Gs Hs]
*
*
*
*
*
*
*
*
*
*
*
*
*
*
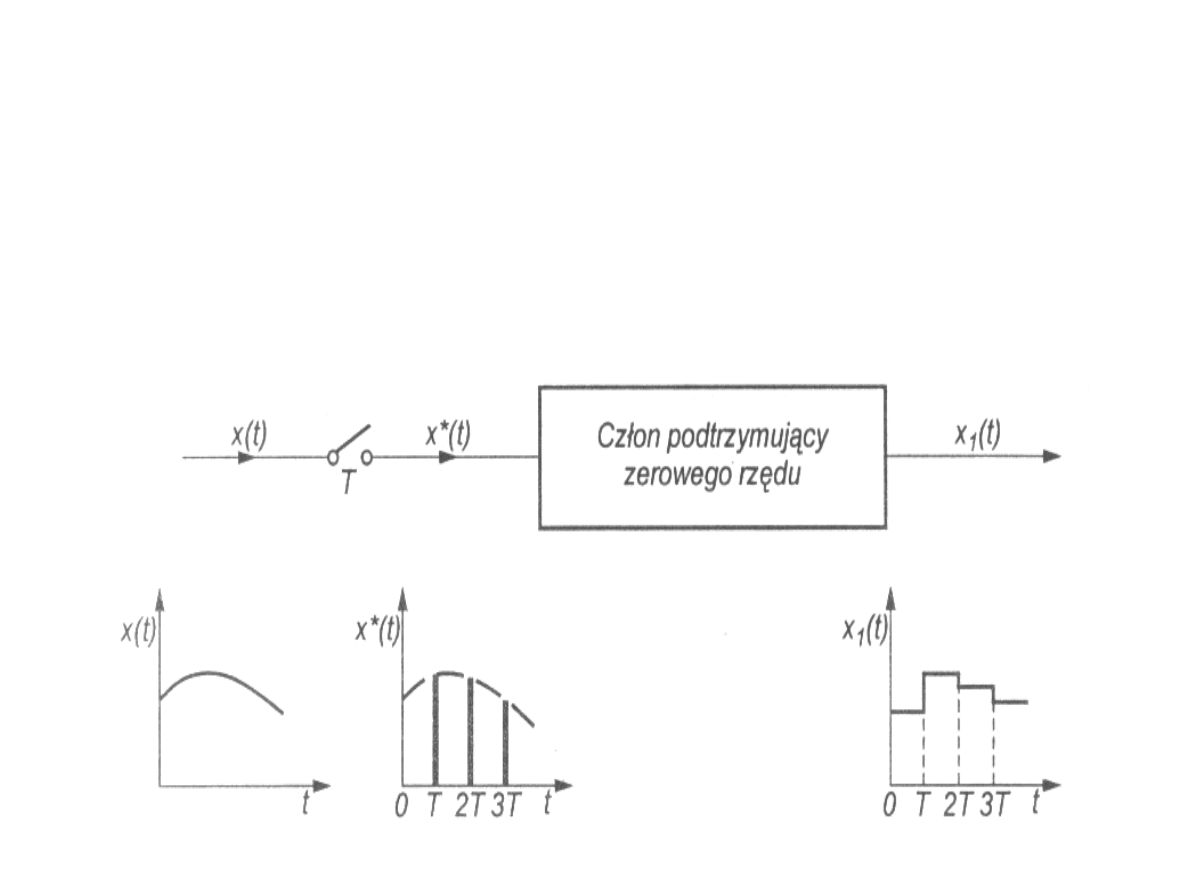
Wukładachrealizowanych fizyczniestosujesięczęsto
ekstrapolatorczłon podtrzymujący zerowegorzędu
Ekstrapolator zerowegorzędu
IdealnyimpulsatordajenawyjściuimpulsDiraca
T
Ekstrapolator zerowegorzędu cd.
x
1
t=
n=0
∞
xnT[1t−nT−1t−nT−T]
X
1
s=
1
s
1−e
−sT
n=0
∞
xnTe
−snT
n=0
∞
xnTe
−snT
= X s
azatem:
G
h0
s=
1−e
−sT
s
Transmitancjawidmowaekstrapolatorazerowegorzędu
G
ho
j =[G
hos
]
s= j
=
1−e
− jT
j
,
po przekształceniach otrzymujemy :
G
ho
j=Te
− j T
2
sin
T
2
T
2
skąd możemy obliczyć:
moduł i fazę transmitancji
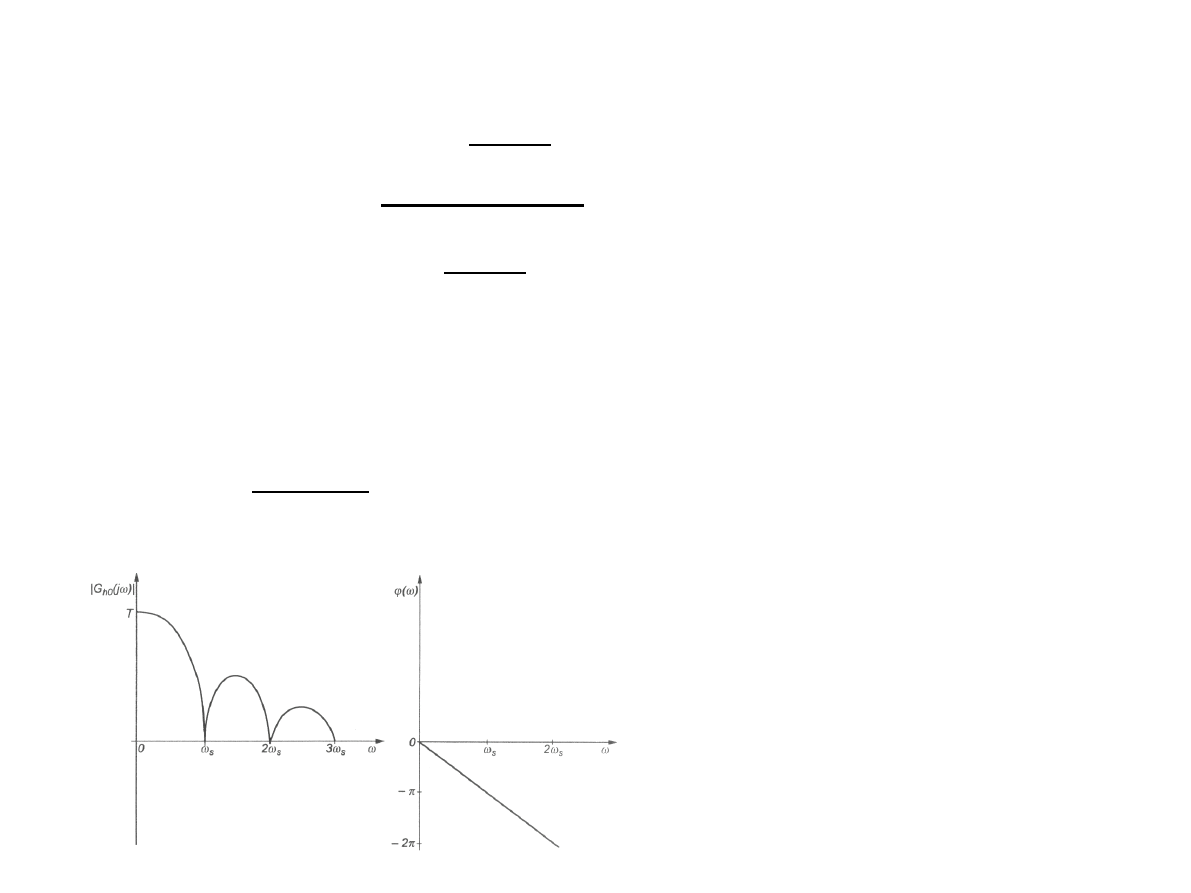
moduł jestrówny:
∣
G
ho
j
∣
=T
∣
sin
T
2
∣
T
2
faza jestzaśrówna
=
−T
2
Ekstrapolator
Obiekt ciągły
G
1
s=
1−e
sT
s
G
2
s
xt
xnT= Xe
jn T
= Xe
jnv
,gdziev=T − pulsacjabezwymiarowa
Dyskretnątransmitancją widmową G jV liniowegoukładuimpulsowego
nazywamy stosunekwartości zespolonychodpowiedzi Y jv dowymuszenia X jv
G jv=
Y jv
X jv
Dyskretnatransmitancjawidmowa

Dyskretnatransmitancjawidmowa cd.
Wukładzie jaknarysunkuzachodzi związekGs=G
1
sG
2
s
Międzydyskretnątransmitancjąwidmowąatransmitancją
dyskretnązachodzi związek:
G jv=[Gz]
z=e
jv
DyskretnatransmitancjawidmowaG jv jestwielkością
zespolonązależnąod parametrówukładui pulsacji v:
G jv=Pv jQv,gdzie:
Pv=real[G jv]
Qv=imag[G jv]
Dyskretnątransmitancjęwidmowąmozna przedstawićtakże
w postaciwykładniczej:
G jv=
∣
G jv
∣
e
j v
,gdzie:
∣
G jv
∣
−moduł dyskretnejtransmitancjiwidmowej
v−argumentdyskretnejtransmitancjiwidmowej
Pomiędzy postaciąalgebraicznąawykładniczązachodzą
związkianalogicznedotychdlaukładówciągłych:
∣
G jv
∣
=
P
2
vQ
2
v
v=arctg
Qv
Pv
Dyskretnatransmitancjawidmowa cd.

Dyskretnatransmitancjawidmowacd.
Wodróżnieniuodukładówciągłychdyskretnatransmitancja
widmowa jest funkcjąokresową pulsacjiV ,gdyż:
G[ jv2 ]=G jv ,a
okrestej funkcjiwynosi 2
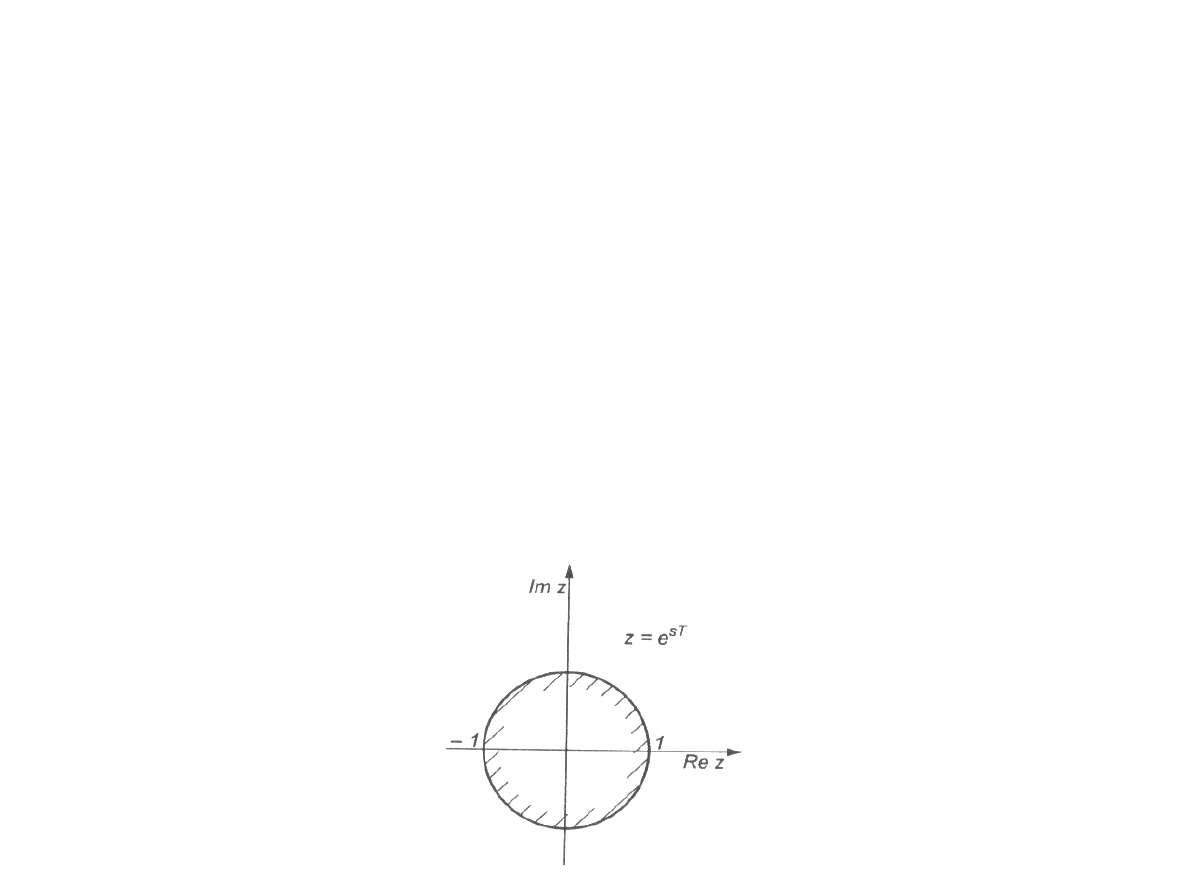
Stabilnośćliniowychukładówimpulsowych
Podobnie jakdlaukładówciągłychrównieżdlaukładów
impulsowychistniejąróżnedefinicjestabilności ,według
Laplace' aukład jeststabilny, jezeli ograniczonemu
wejściuodpowiadaograniczonewyjście
Jeżeli transmitancjadyskretnaukładu jestrówna:
G z=
L z
M z
¿
ostabilnościukładudecyduje położeniepierwiastków
równaniacharakterystycznego:
Stabilnośćliniowychukładówimpulsowych cd.
Równaniecharakterystyczneukładuma postać:
M z=0
Warunkiemstabilności układu jestabywszystkie pierwiastki
jegorównania charakterystycznegospełniaływarunek
∣
z
i
∣
1, dlai=1,2....N ,gdzieNrządwielomianuM z
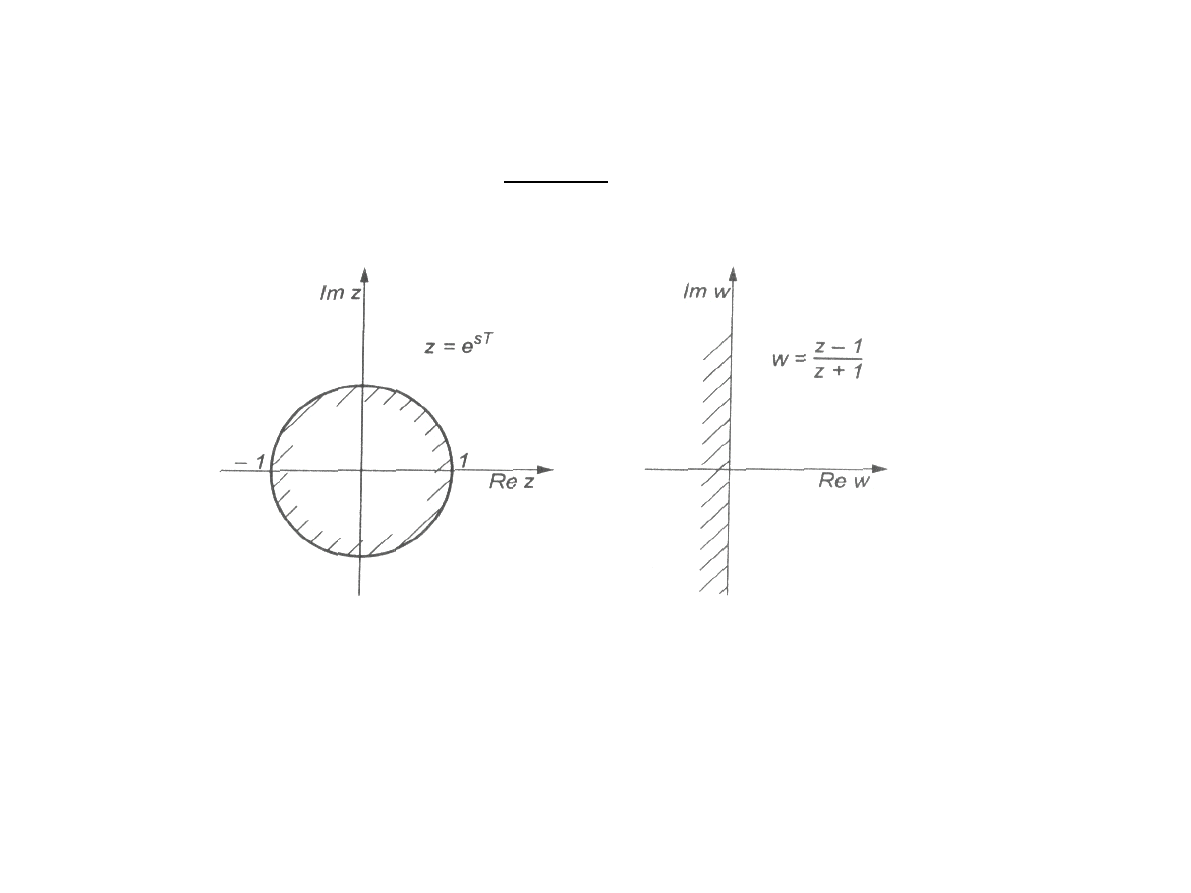
Przekształceniebliliniowe
z=
w1
w−1
Przekształcenietoodworowujewnętrzeokręgu
jednostkowegona płaszczyźniezwlewą półpłaszczyznę
płaszczyznyzmiennej zespolnej w

ponieważ przekształceniebiliniowezamieniawnętrze
okręgu jednostkowegowlewą półpłaszczyznętomożna
stosowaćdlanowej zmiennej zespolonej wkryteriatakie
jakdlaukładówciągłychnp:
KryteriumHurvitza
KryteriumRoutha
KryteriumMichajłowa
KryteriumNyquista

Dziękuję za uwagę
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
Wyszukiwarka
Podobne podstrony:
procesy ciagle i dyskretne
5 Algorytmy wyznaczania dyskretnej transformaty Fouriera (CPS)
01Zmienne losowe dyskretneid 3335 ppt
dyskretna lista5
Dyskretne przeksztaĹ'cenie Fouriera
matematyka dyskretna w 2 id 283 Nieznany
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
Denisjuk A Matematyka Dyskretna
Zginanie prętów obciążenie ciągłe
Zadania 2, Studia, II sem, Dyskretna - cz. I
C2, Matematyka studia, Matematyka dyskretna
rozwiazania zerowka mat dyskretna
DYSKRETYZACJA Jasiek
Matematyka Dyskretna Test#1
Matematyka dyskretna Zadania(1)
matma dyskretna 05 id 287941 Nieznany
mata dyskretna, C3
zmienne losowe dyskretne id 591 Nieznany
więcej podobnych podstron