
UKŁADY NAPĘDOWE 1

1.1.1. Parametry ruchów podstawowych
.
Najważniejszymi parametrami ruchów podstawowych są:
1.1. Parametry procesu roboczego obrabiarki
1000
n
d
V
•
prędkość liniowa ruchu głównego zwana prędkością skrawania V
wyrażona w [m/min] lub przy szlifowaniu w [m/s],
•
prędkość ruchu posuwowego p
t
wyrażana w [mm/min] lub [m/min].
Pomiędzy prędkością skrawania V [m/min], średnicą d [mm]
przedmiotu obrabianego lub narzędzia i prędkością obrotową n
[obr/min] charakteryzującą ruch główny obrotowy zachodzi związek
określony zależnością (1.1), której obraz graficzny przedstawia rys. 1.
[m/min]
(1.1)
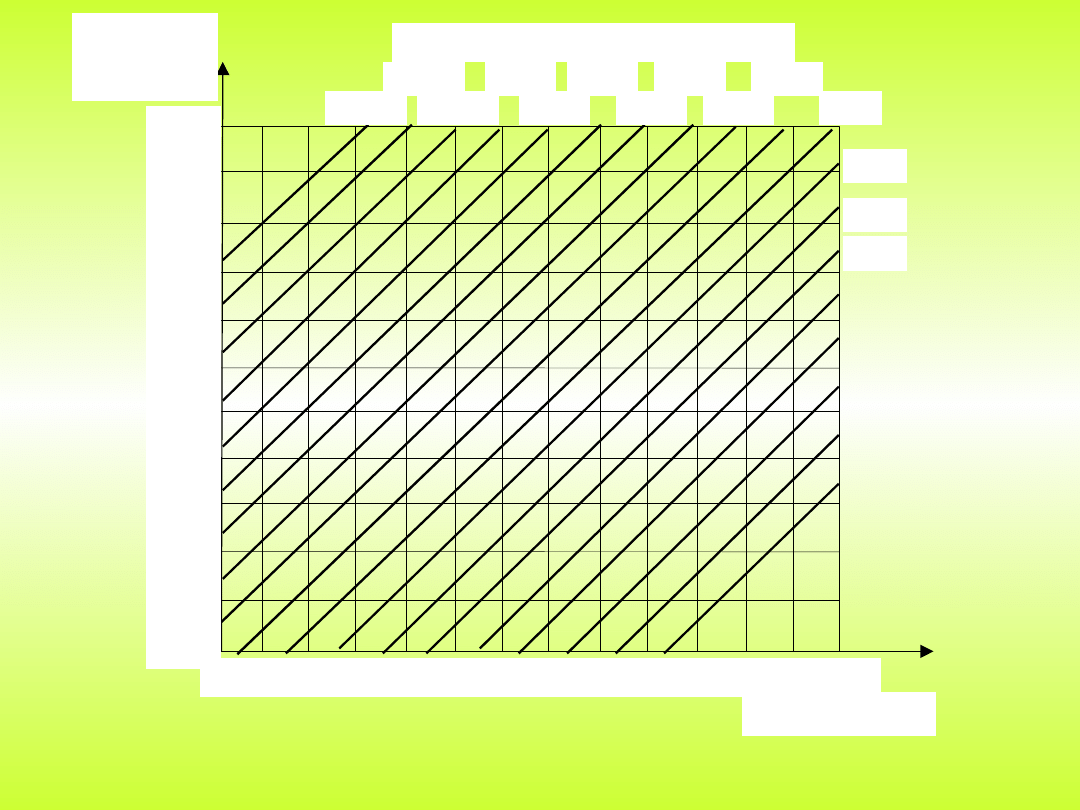
Rys. 1. Wykres V = f (d, n) we współrzędnych logarytmicznych: ciąg
prędkości obrotowych, średnic i prędkości skrawania o ilorazie φ = 1,41
11 16 22 32 45 63 90 125 180 250 355 500 710 1000
2000
1400
1000
710
500
355
250
180
125
90
63
45
1000
1400
2000
2800
4000
5600
00
8000
00
11200
16000
22000
710
500
355
250
180
125
90
63
45
Średnica d [mm]
Prędkość
skrawania
V [m/min]
Prędkość obrotowa wrzeciona n [1/min]

posuw na obrót p
o
[mm/obr], wyrażający drogę ruchu posuwowego
przebytą w czasie jednego obrotu przedmiotu (przy toczeniu) lub
narzędzia (przy wierceniu),
posuw na skok p
skok
[mm/skok] wyrażający drogę ruchu posuwowego
przypadającą na jeden lub dwa skoki elementu roboczego wykonującego
okresowo ruch główny prostoliniowy (np. przy struganiu i szlifowaniu),
posuw na ostrze p
Z
[mm/ostrze],
określający przemieszczenie
względne narzędzia i przedmiotu obrabianego, odpowiadające obróceniu
narzędzia wieloostrzowego (freza, piły) o kąt podziałki międzyostrzowej,
posuw minutowy p
t
[mm/min], określający prędkość ruchu
posuwowego.
Z podanych definicji wynika związek:
[mm/min] (1.2)
Parametrami charakteryzującymi ruch posuwowy, zależnie od sposobu
obróbki, mogą być:
n
z
p
n
p
p
z
o
t
•
Siły, momenty i moc skrawania.
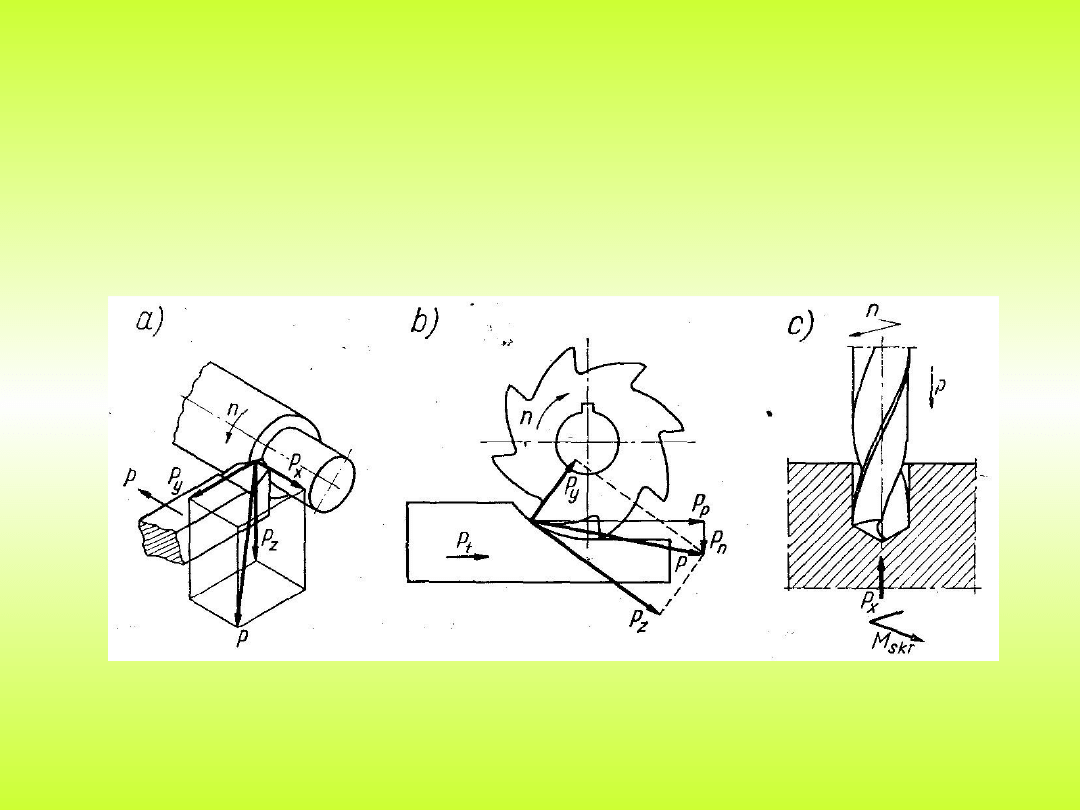
W procesie skrawania narzędzie działa na przedmiot obrabiany z
siłą, której towarzyszy równa lecz przeciwnie zwrócona siła obciążająca
narzędzie. Siłę tę, zwaną wypadkową siłą skrawania, rozkłada się na trzy
wzajemnie prostopadłe składowe (rys. 1): główną albo styczną P
z
,
odporową P
y
,
posuwową (boczną) P
x
.
Rys. 1. Siły obciążające narzędzie podczas skrawania: a) toczenie wzdłużne,
b) frezowanie frezem o zębach prostych - pokazano dodatkowo rozkład
wypadkowej siły skrawania P na dwie składowe: posuwową P
p
i normalną do
obrobionej powierzchni P
n,
c) wiercenie - siły obwodowe działające na ostrze
wiertła zastąpiono momentem M

Znając główną siłę skrawania P
Z
[N] i szybkość skrawania V [m/s],
można wyznaczyć moc skrawania:
[kW]
(1.3)
1000
V
P
N
z
e
(1.4)
]
kW
[
9850
n
M
10
3
n
M
]
W
[
M
N
4
e
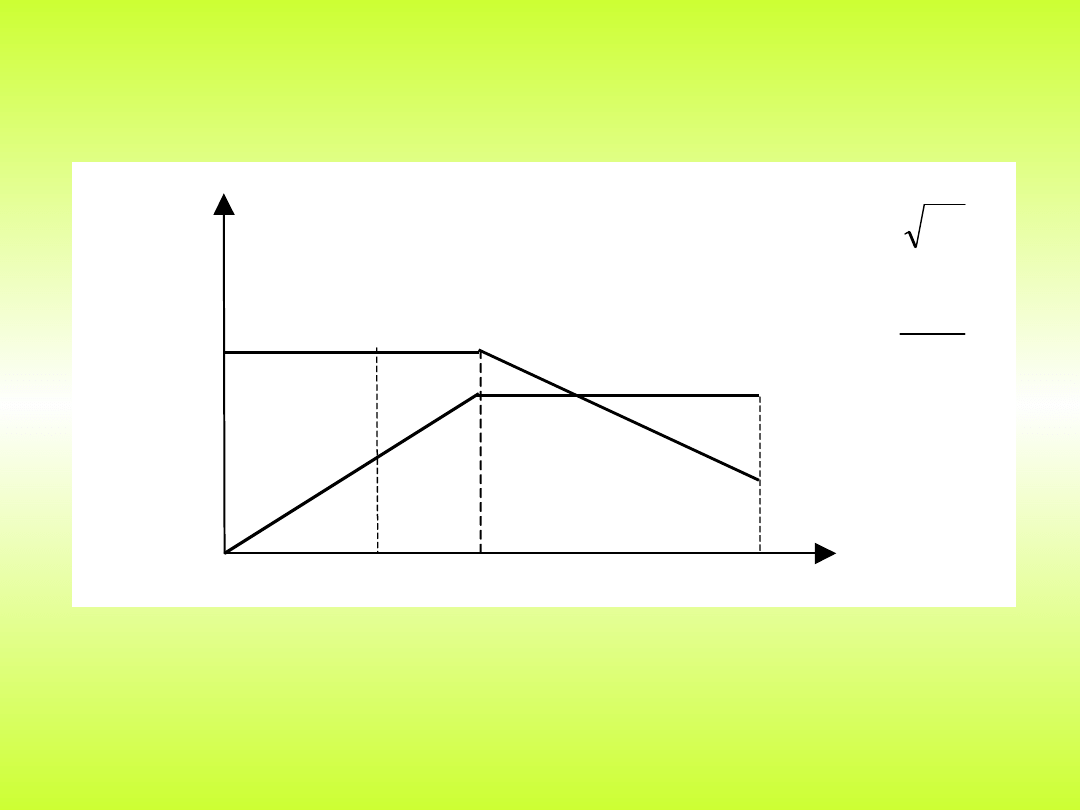
1.2. Technologiczna charakterystyka obciążenia
napędu głównego obrabiarki
Rys. 2. Technologiczna charakterystyka obciążenia obrabiarki
ogólnego przeznaczenia o ruchu głównym obrotowym
N [log]
M [log]
M=const
N=const
n
min
n` n
max
n
wr
[log]
4
n
min
R
n
'
n
min
max
n
n
n
R
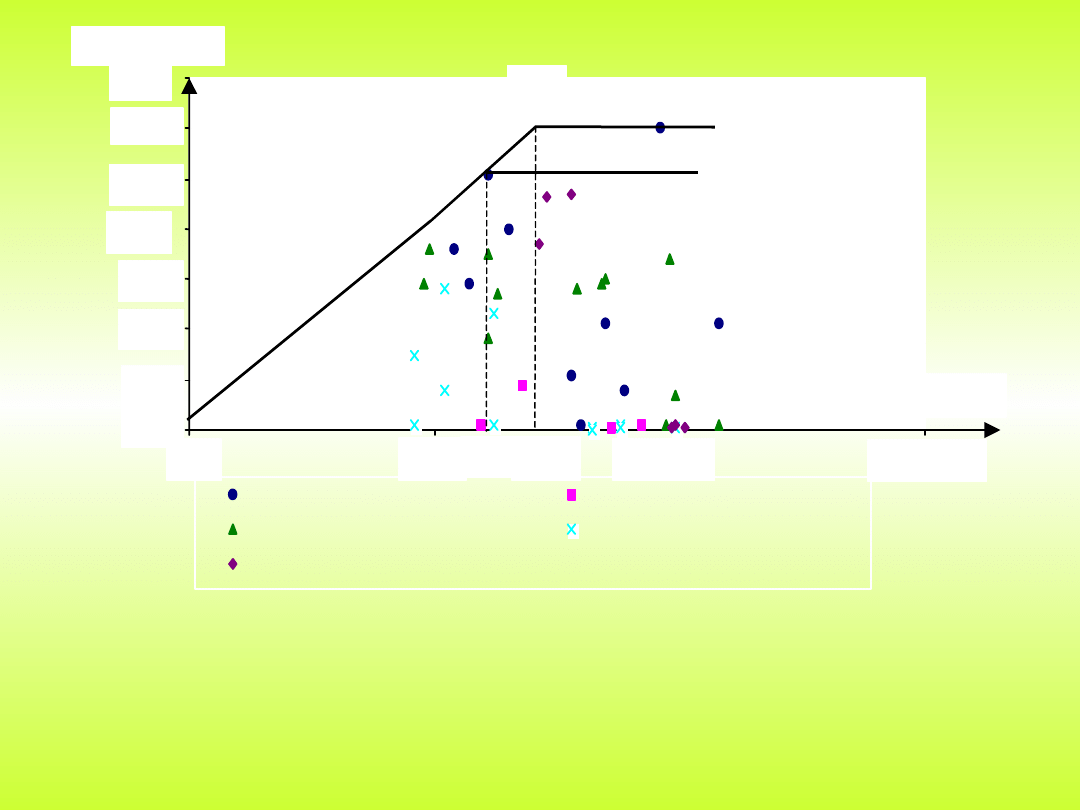
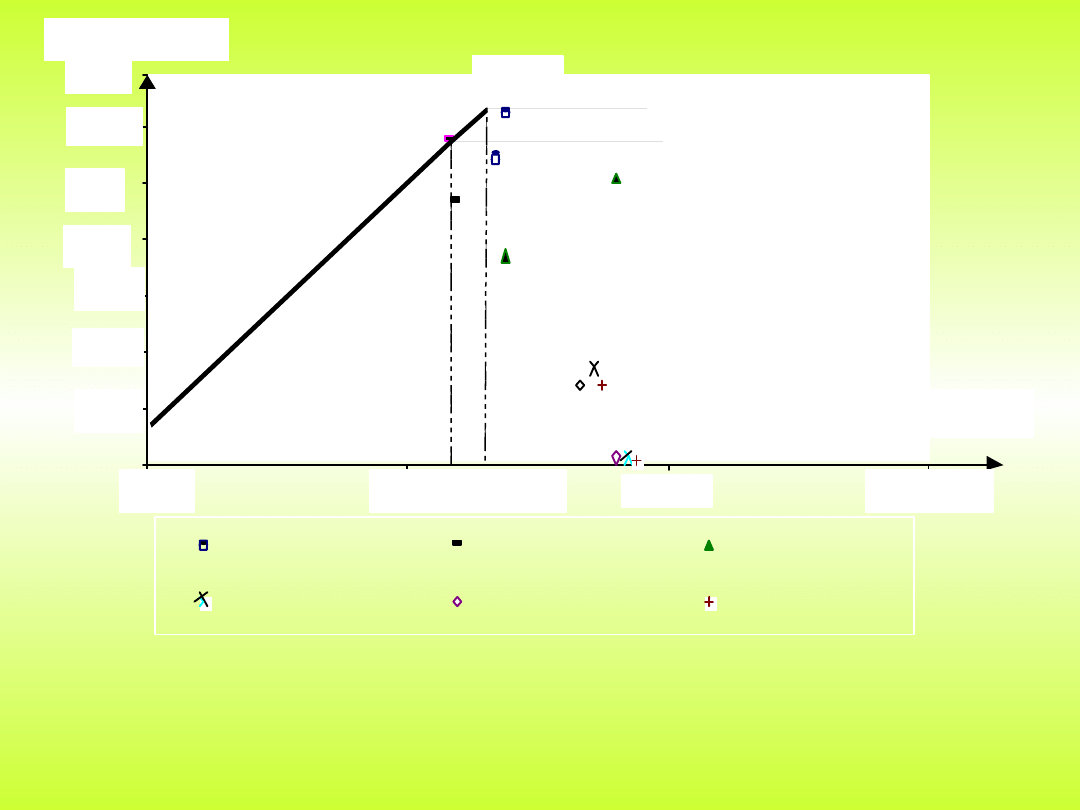
Rys. 3. Technologiczna charakterystyka obciążenia napędu
głównego tokarki o średnicy nominalnej toczenia 140 [mm]
0
1
0
2
0
3
0
4
0
5
0
6
0
7
0
50
10
0
15
0
20
0
Toczenie wzdłużne zgrubne
Toczenie wzdłużne wykończeniowe
Toczenie rowków
Toczenie gwintów
Wiercenie
56
56
31
18
10
5,6
3,15
1,8
31,5
56
31
18
10
5,6
3,15
1,8
0
18
31
18
10
5,6
3,15
1,8
0
10
31
18
10
5,6
3,15
5,6
31
18
10
5,6
3,15
3,2
31
18
10
5,6
1,8
31
18
0,6
10
5,6
18
31
315
31
18
5600
31
18
100000
31
18
591 977
Prędkość obrotowa n [1/min]
Moc N [KW]
aluminium
stal i żeliwo
n´
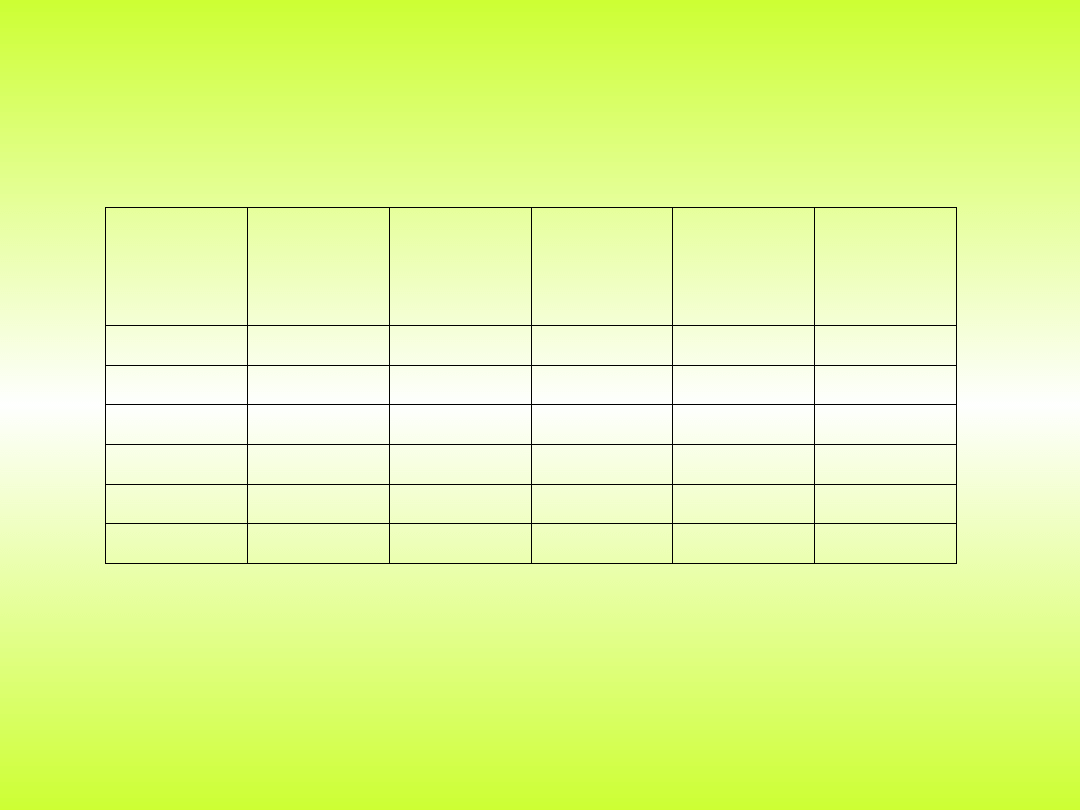
Nominalna
średnica
toczenia
Moc
efektywna
N
max
Prędkość
obrotowa
wrzeciona
n
min
Prędkość
obrotowa
wrzeciona
n
max
Prędkość
obrotowa
obliczeniowa
n’
Prędkość
obliczona
wg wzoru
(1,4) n
obl
’
mm
kW
obr/min
obr/min
obr/min
obr/min
63
8,2
560
12 000
2180
1200
140
31,7
300
9100
980
700
200
31,7
175
6400
530
430
315
31,7
110
4000
430
270
400
31,7
90
3200
340
220
Tab. 1. Istotne punkty technologicznej charakterystyki obciążenia napędów
głównych tokarek
Rys. 4. Technologiczna charakterystyka obciążenia napędu głównego
frezarki z gniazdem wrzeciona HSK 50
1
0
5 0
1 5 0
2 0 0
F r e z o w a n i e s t a l i 4 5
F r e z o w a n i e ż e l i w a
F r e z o w a n i e a l u m i n i u m
W i e r c e n i e s t a l i 4 5
W i e r c e n i e ż e l i w a
W i e r c e n i e a l u m i n i u m
5 6
5 6
3 1
1 8
1 0
5 , 6
3 , 1 5
1 , 8
3 1 , 5
3 1
1 8
1 0
5 , 6
3 , 1 5
1 , 8
0
1 8
3 1
1 8
1 0
5 , 6
3 , 1
5
1 0
3 1
1 8
1 0
5 , 6
3 , 1 5
5 , 6
3 1
1 8
1 0
5 , 6
3 , 1 5
3 , 2
1 8
1 0
5 , 6
3 , 1 5
1 , 8
3 1
1 8
1 8
3 1
1 8
1 0 0 0 0 0
3 1
1 8
3 1 5 5 0 9 6 9 2
P r ę d k o ś ć o b r o t o w a n [ o b r / m i n ]
M o c N [ K W ]
n ´
s t a l w ę g l o w a 4 5
ż e l i w o i a l u m i n i u m
5 6 0 0
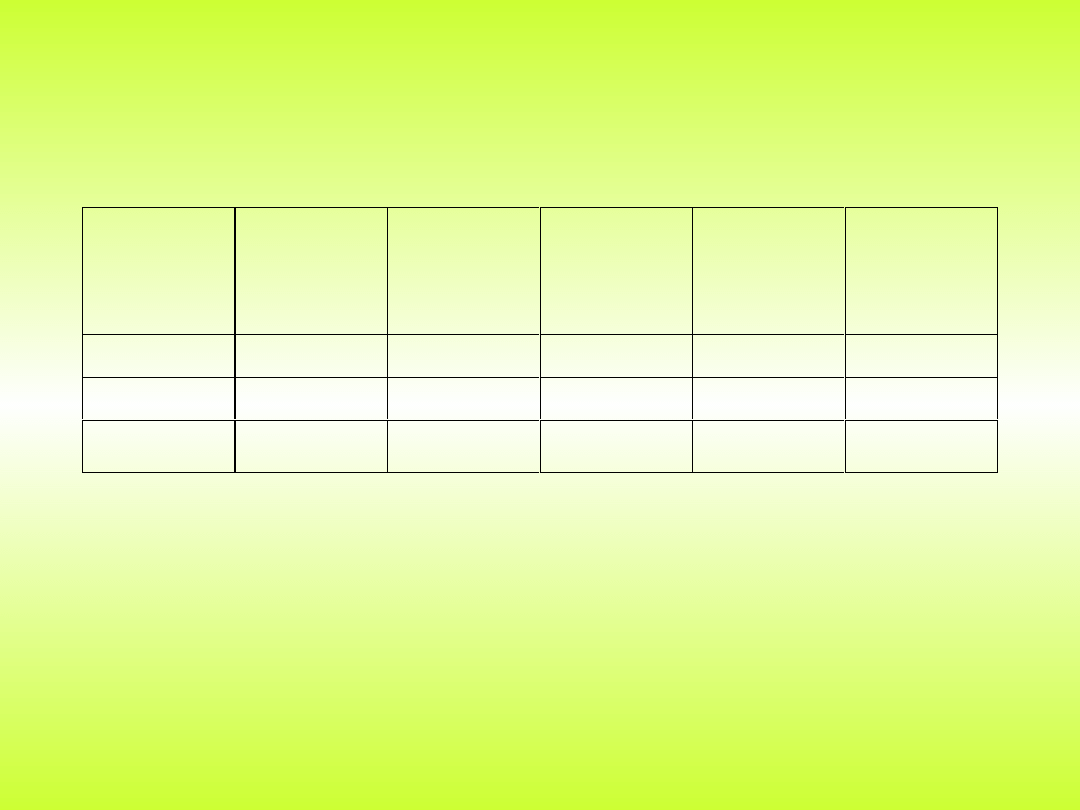
Tab. 2. Istotne punkty technologicznej charakterystyki obciążenia napędów
głównych frezarek
Gniazdo
wrzeciona
Moc
efektywna
N
max
Prędkość
obrotowa
wrzeciona
n
min
Prędkość
obrotowa
wrzeciona
n
max
Prędkość
obrotowa
obliczeniowa
n’
Prędkość
obliczona
wg wzoru
(1,4) n
obl
’
kW
obr/min
obr/min
obr/min
obr/min
HSK 40,
8,8
920
8 000
2270
1680
HSK 50
37,4
160
4100
690
360

1.3. Klasyfikacja i charakterystyka napędów
głównych
Nowoczesne napędy główne obrabiarek powinny
cechować się:
dużą sztywnością charakterystyki mechanicznej, czyli małym
spadkiem
prędkości obrotowej wału silnika przy wzroście
momentu obciążenia,
dużym zakresem bezstopniowej zmiany (nastawiania) prędkości
obrotowej silnika do n = 20.000 - 40.000 obr/min,
takim przebiegiem dopuszczalnego obciążenia w funkcji prędkości
obrotowej,
który dostosowany jest do technologicznej
charakterystyki obciążenia
obrabiarki,
szybkim rozruchem, zwłaszcza przy wysokich prędkościach
obrotowych, w celu
krótkiego “dochodzenia” do zadanej
prędkości - w celu skrócenia
czasów pomocniczych,
zdolnością do pracy serwonapędowej i możliwością pozycjonowania
przy
hamowaniu.
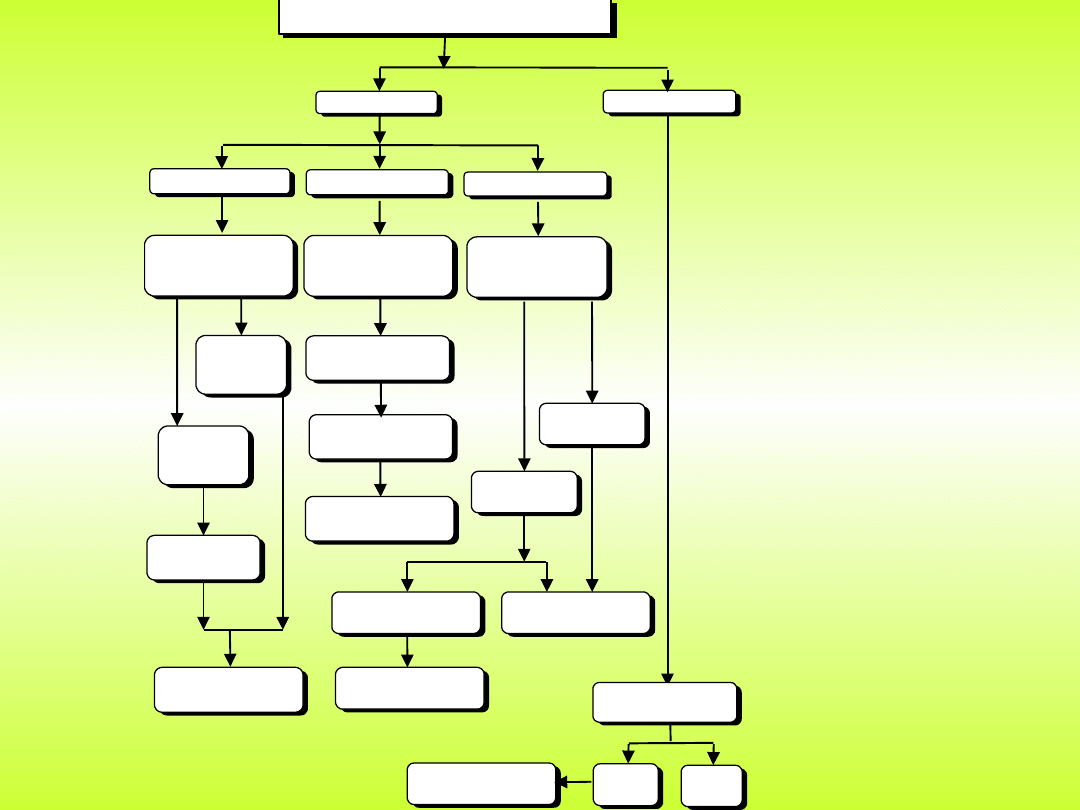
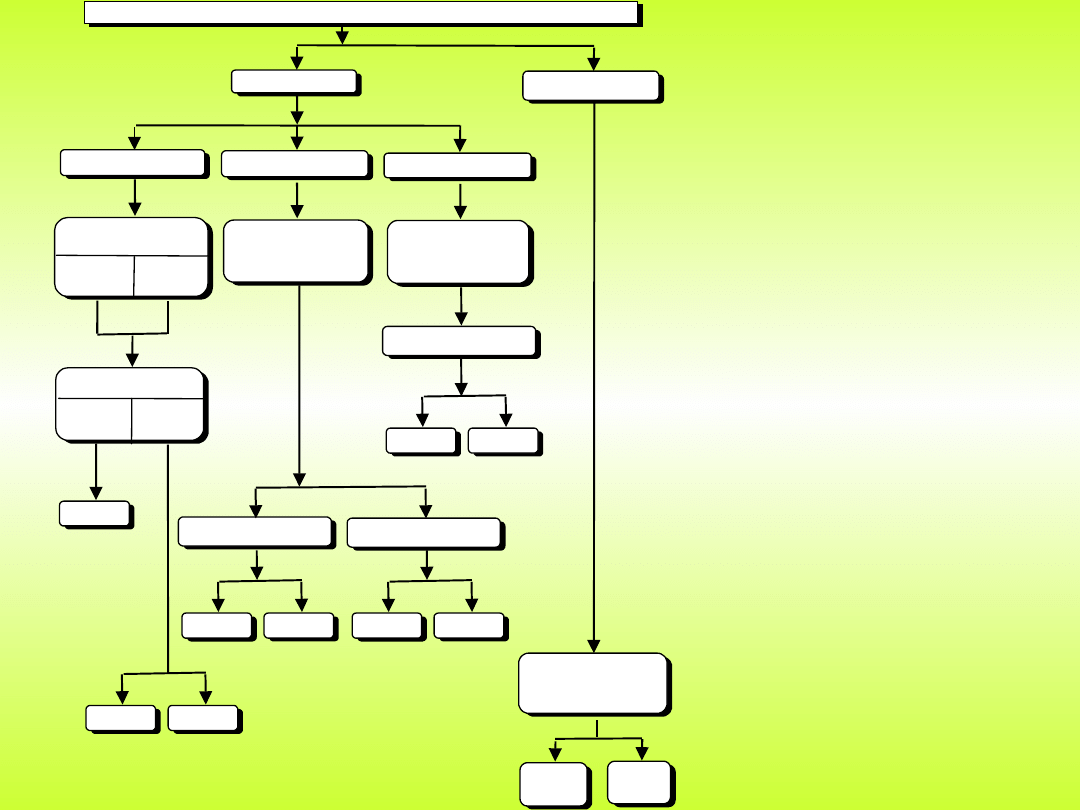
Rys. 5. Klasyfikacja
napędów wykonawczych w
obrabiarkach i
urządzeniach
technologicznych
NAPĘDY GŁÓWNE OBRABIAREK
stopniowa
skrzynka
prędkości
przekładnia
zwielokrotniająca
komutatorowy
silnik prądu stałego
silnik asynchroniczny
regulator prędkości
tyrystorowy
zasilacz prądu stałego
regulator prędkości
układ prostowniczy
falownik
prądu przemiennego
prądu stałego
elektromechaniczne
elektryczne
hydrauliczne
silnik
asynchroniczny
elektrowrzeciono
element wykonawczy
(wrzeciono)
element wykonawczy
(wrzeciono)
przekładnia
pasowa
zasilacz hydrauliczny
elektrozawory
siłownik
liniowy
silnik
obrotowy
element wykonawczy
(wrzeciono)
mechaniczna
przekładnia
bezstopniowa
silnik
synchroniczny
element wykonawczy
(wrzeciono)
przekładnia
zwielokrotniająca
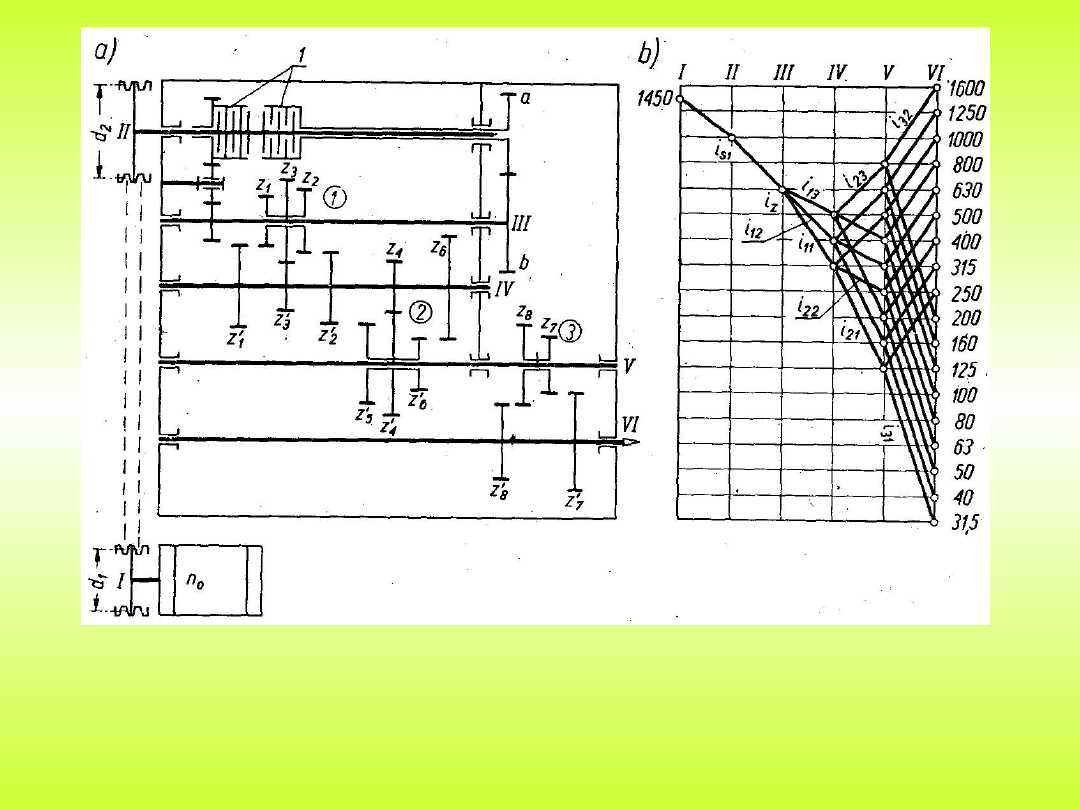
Rys. 6. Stopniowy (18-stopni) napęd główny: a) schemat kinematyczny, b)
wykres przełożeń: I – sprzęgła nawrotnicy, a, b – koła wymienne
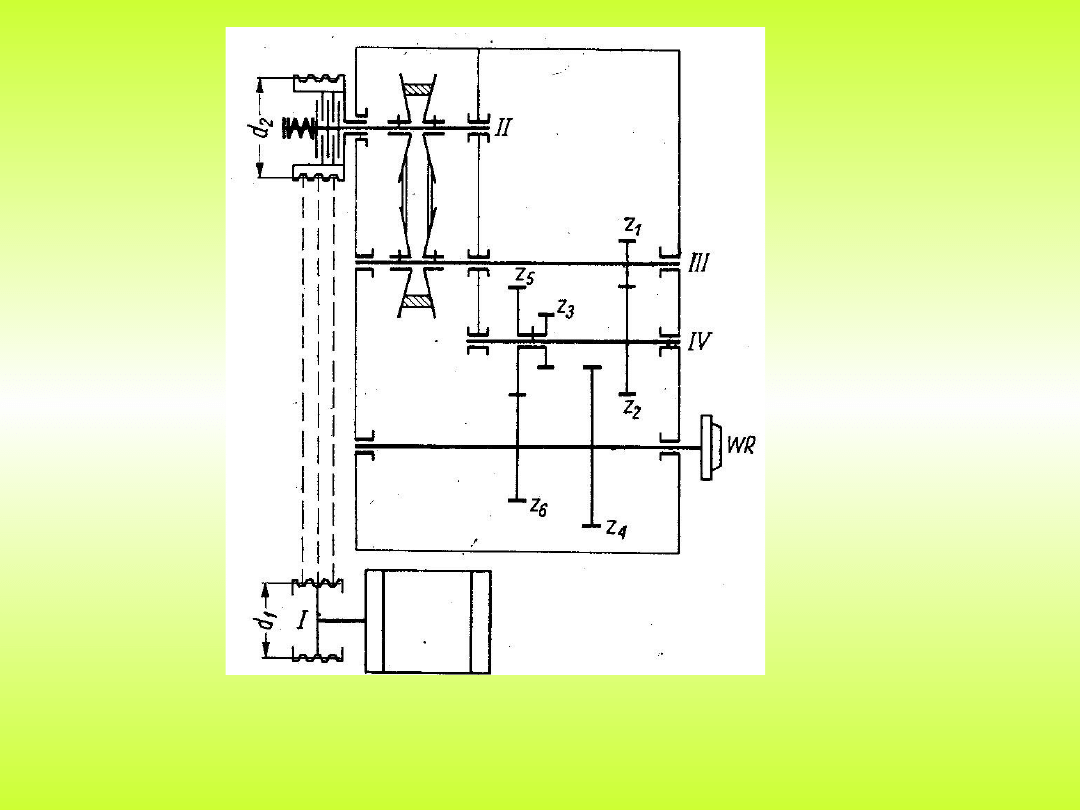
Rys. 7. Schemat kinematyczny elektromechanicznego bezstopniowego
napędu głównego
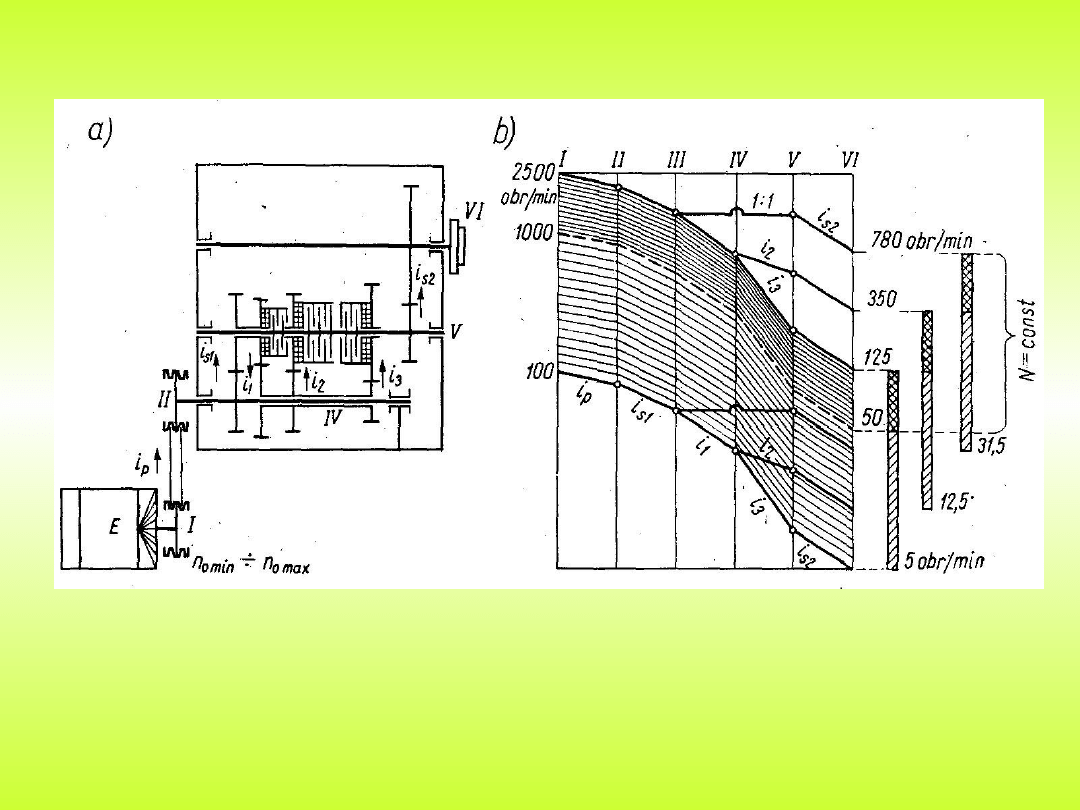
Rys. 8. Struktura napędu głównego z silnikiem prądu stałego i 2 stopniową
przekładnią rozszerzającą zakres prędkości wrzeciona: a) schemat
kinematyczny, b) wykres prędkości
Rys. 9. Struktura napędu głównego z silnikiem prądu przemiennego
Silnik
WR
Wrzeciennik
n
0min
- n
0max
Przekładnia
pasowa
D
2
D
1
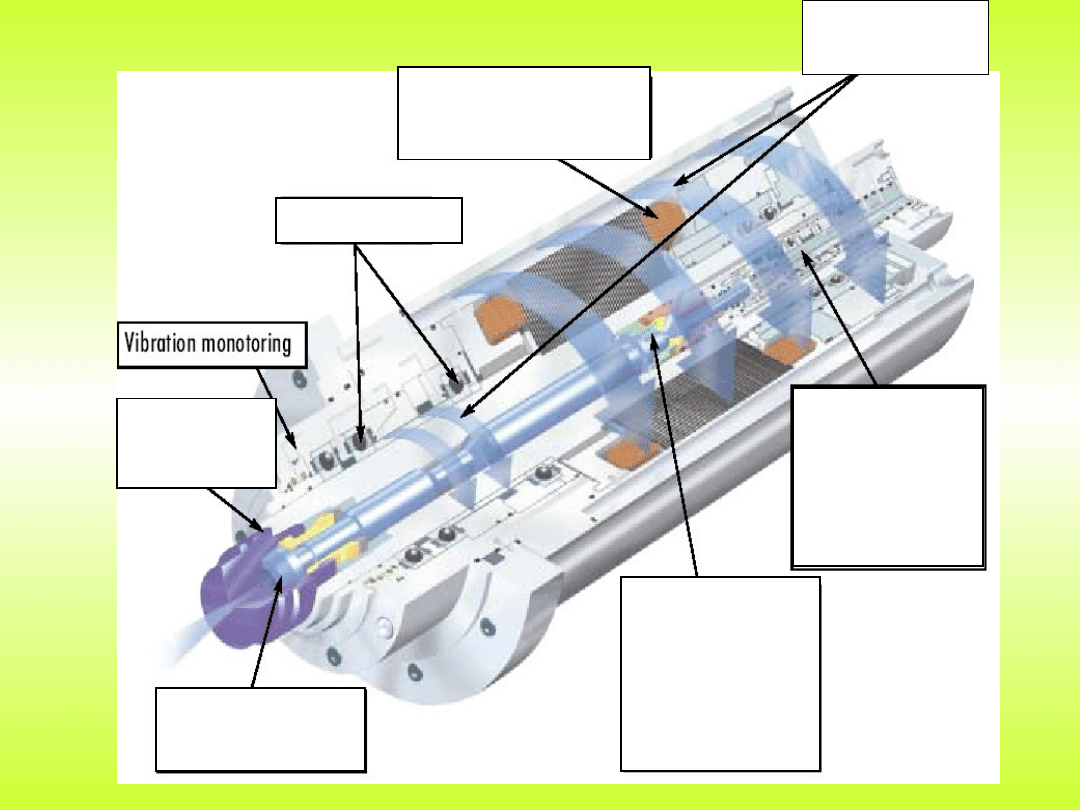
Układ zaciskający
zapewniający bardzo
wysoką nośność przez
zastosowanie
hydromechanicznej
blokady zacisku
Jednostka obrotowa
posiadająca niekiedy
wewnętrzny przepływ
czynnika chłodzącego
Chłodzenie wału
wrzeciona i silnika
Łożyska wrzeciona
Styk powierzchni
narzędzia
Interfejs narzędzia,
np. HSK
Uzwojenia stojana silnika
elektrowrzeciona
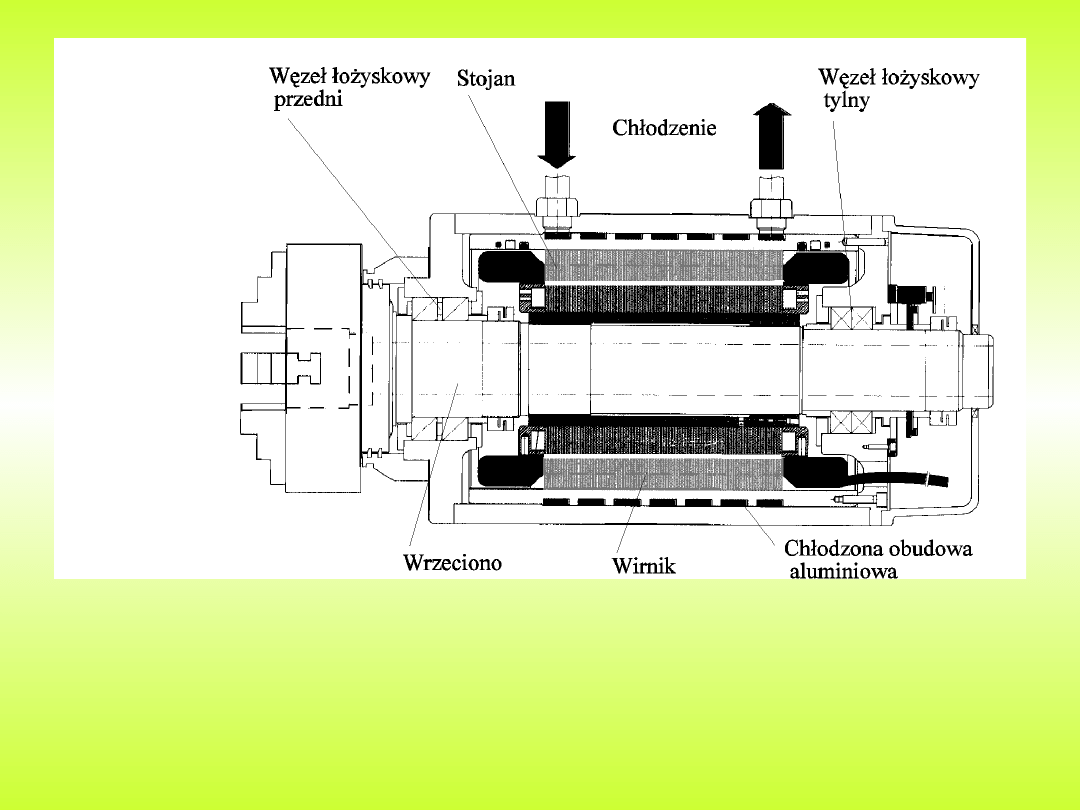
Rys. 10. Budowa elektrowrzeciona napędu głównego obrabiarki

1.4. Klasyfikacja i charakterystyka napędów ruchu
posuwowego
Wymagania szczegółowe stawiane napędom ruchu posuwowego w
nowoczesnych obrabiarkach można przedstawić następująco:
szeroki zakres bezstopniowej zmiany prędkości silnika, umożliwiający
realizację zarówno posuwu roboczego w zakresie p
t
= 0 - 4 m/min, jak
i szybkiego przesuwu do ok. 20 - 40 m/min,
szybki rozruch i hamowanie, czyli duże przyspieszenie i opóźnienie
ruchu, które uwarunkowane jest dużym momentem rozwijanym przez
silnik w stanach przejściowych i małymi momentami bezwładności
napędzanych elementów,
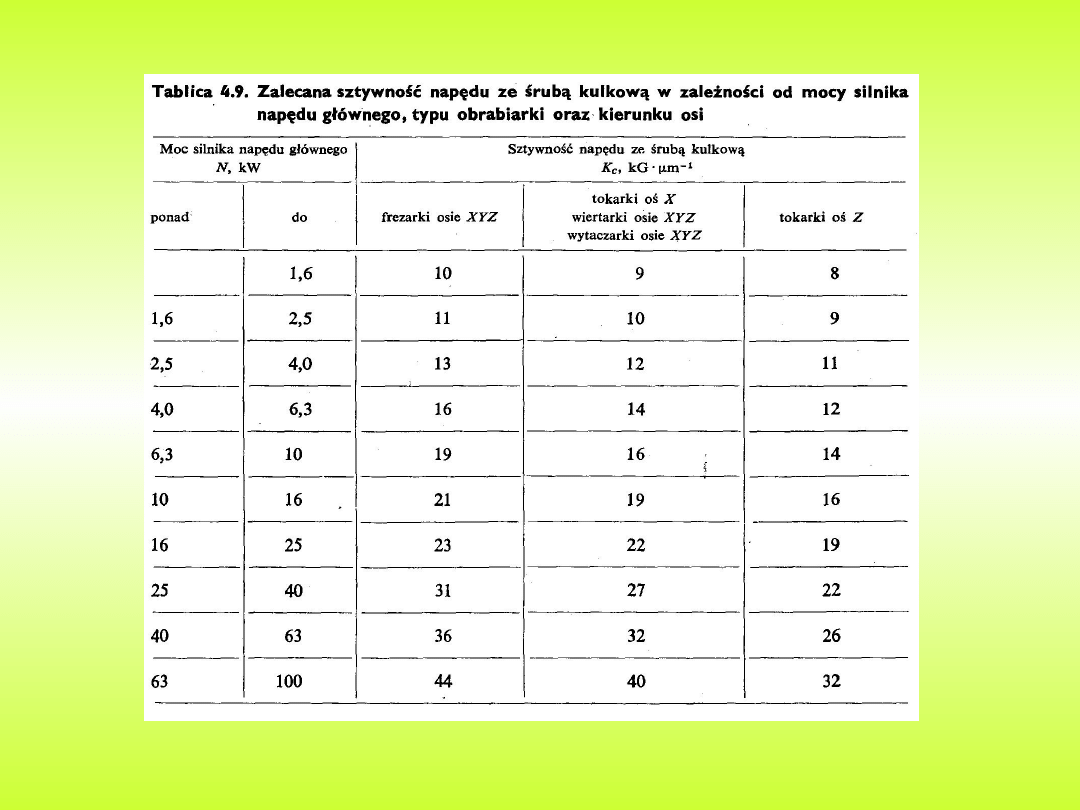
duża sztywność mechanicznych elementów przenoszących napęd od
silnika do zespołu przesuwnego obrabiarki i duża odporność na
pojawianie
się
zjawiska
“stick-slip”,
czyli
ciernych
drgań
relaksacyjnych,
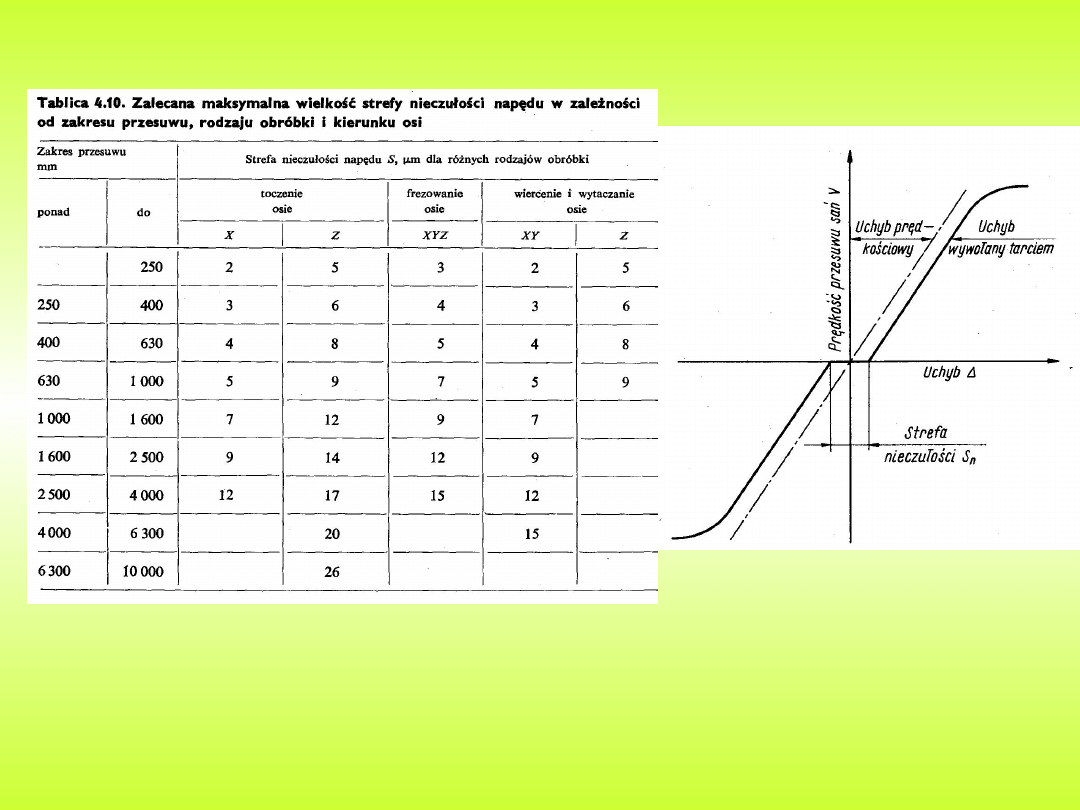
małe opory ruchu uwarunkowane niewielkimi siłami tarcia w
połączeniach prowadnicowych i przekładniach, co jest istotne
szczególnie ze względu na zjawisko “stick-slip” i oszczędność energii
przy ruchach przesuwnych,
wysoka równomierność ruchu (małe wahania prędkości), zwłaszcza dla
niskich prędkości posuwu,
duża dokładność pozycjonowania, czyli mały elementarny krok
umożliwiający zrealizowanie elementarnego przemieszczenia rzędu
2m.
Rys. 5. Klasyfikacja napędów
ruchu posuwowego w
obrabiarkach
układ prostowniczy
NAPĘDY POZYCJ ONUJ ĄCE OBRABIAREK I MASZYN TECHNOLOGICZNYCH
silnik prądu stałego
komu- bezkomu-
tatorowy tatorowy
obrotowy
silnik skokowy
silnik asynchroniczny
silnik synchroniczny
regulator
zasilacz prądu stałego
tyrystorowy tranzysto-
rowy
regulator
układ prostowniczy
falownik
skokowe
prądu przemiennego
prądu stałego
elektryczne
impulsowy
zasilacz
elektroniczny
regulator
serwozawór
zasilacz hydrauliczny
elektrohydrauliczne
siłownik
liniowy
silnik
obrotowy
liniowy
obrotowy
liniowy
obrotowy
liniowy
obrotowy
liniowy
obrotowy
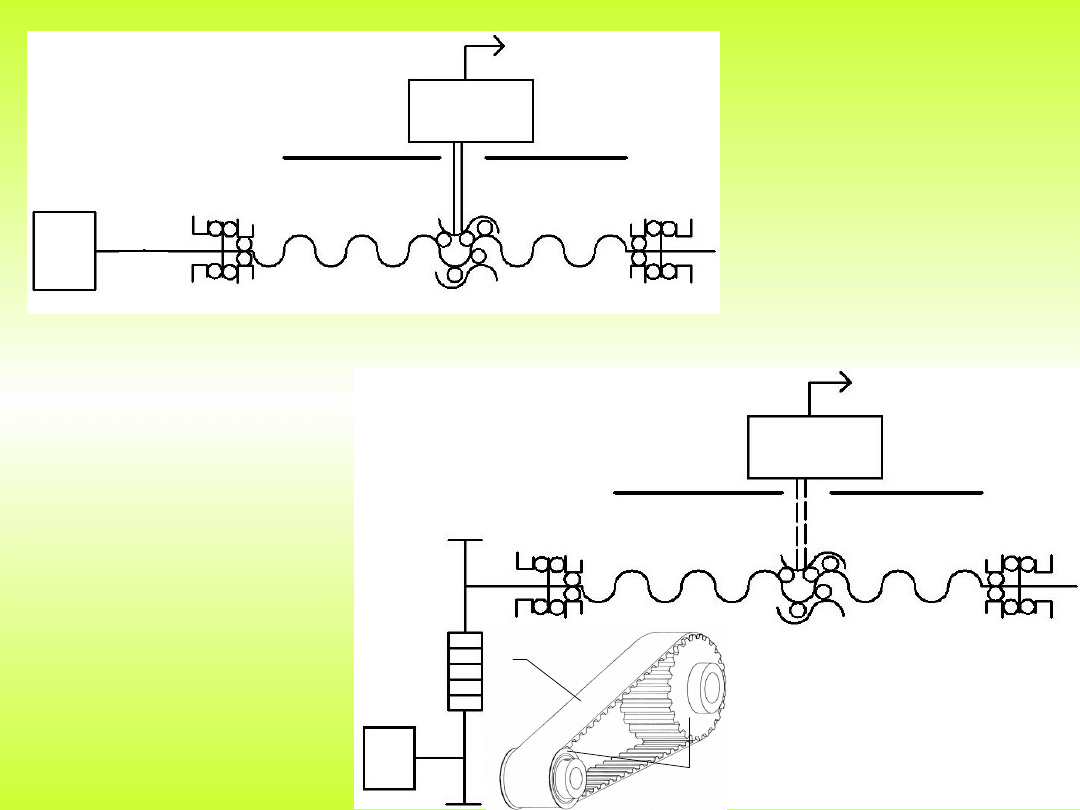
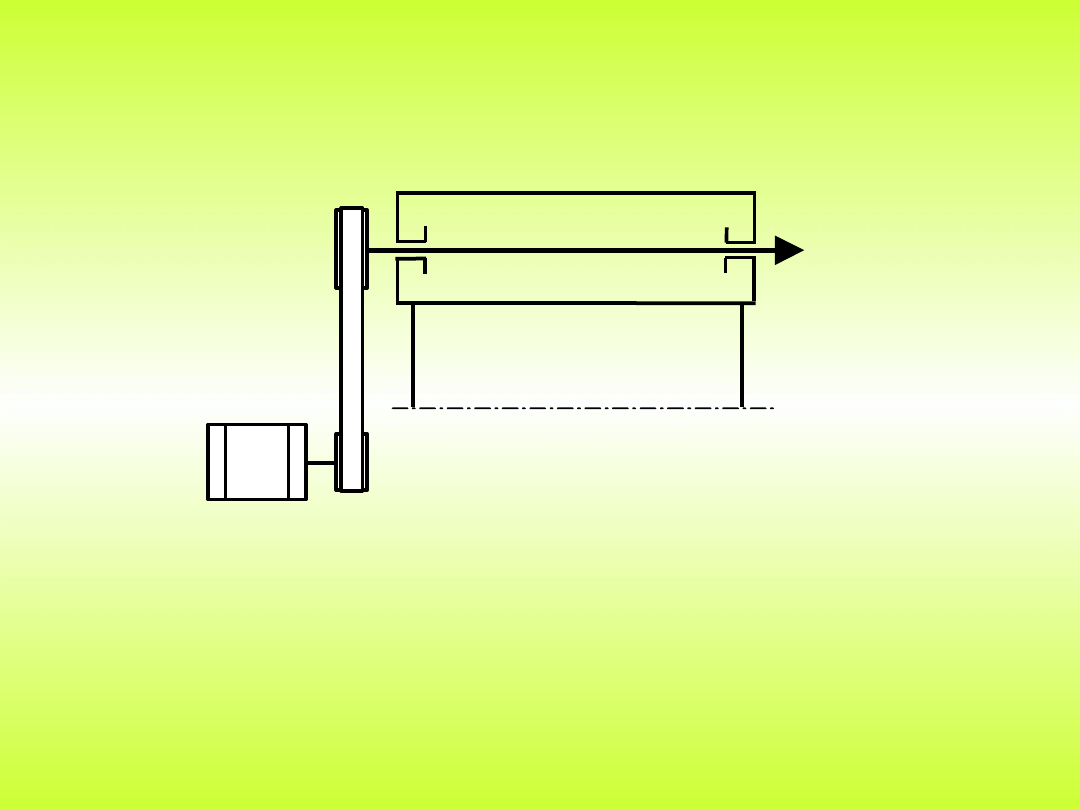
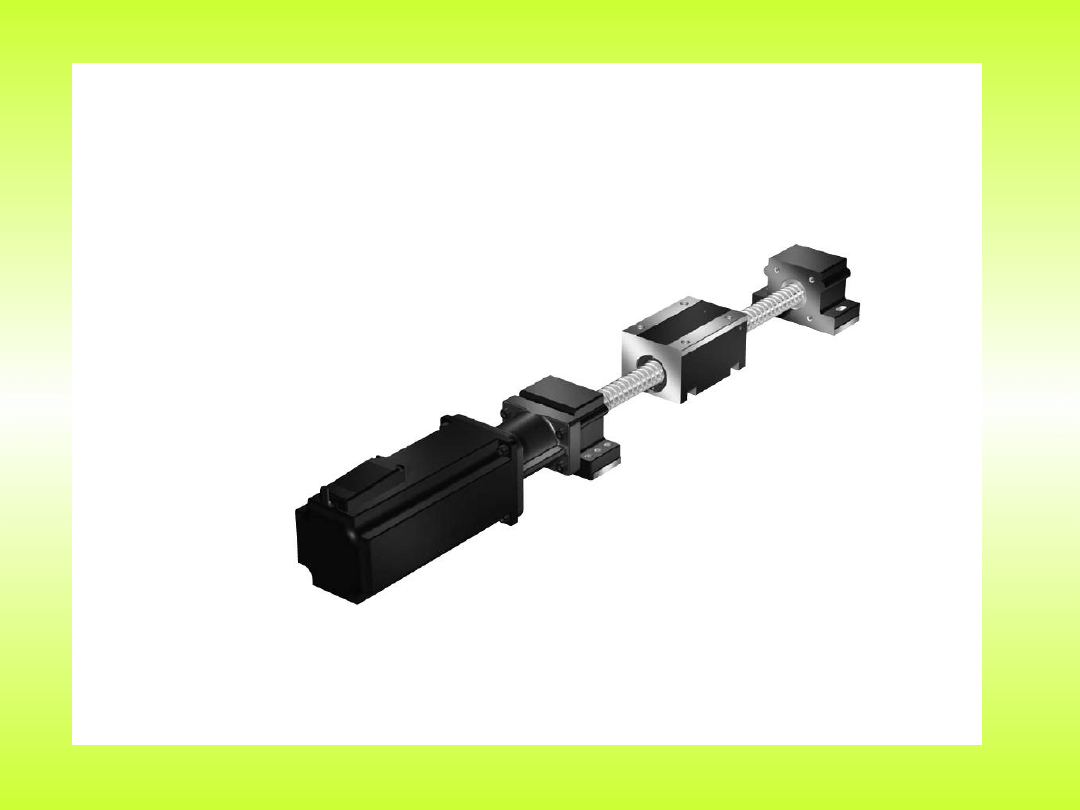
Rys. 7. Napęd posuwu z
przekładnią śrubowo-
toczną z obracającą się
śrubą: a – silnik
bezpośrednio napędza
śrubę, b - silnik napędza
śrubę przez przekładnię
pasową zębatą
V
Zespół
przesuwny
Silnik
Przekładnia
śrubowo- toczna
Przekładnia
paskowo-zębata
Silnik
Przekładnia
śrubowo-toczna
V
i
n
s
Zesół
przesuwny
a)
b)
1
2

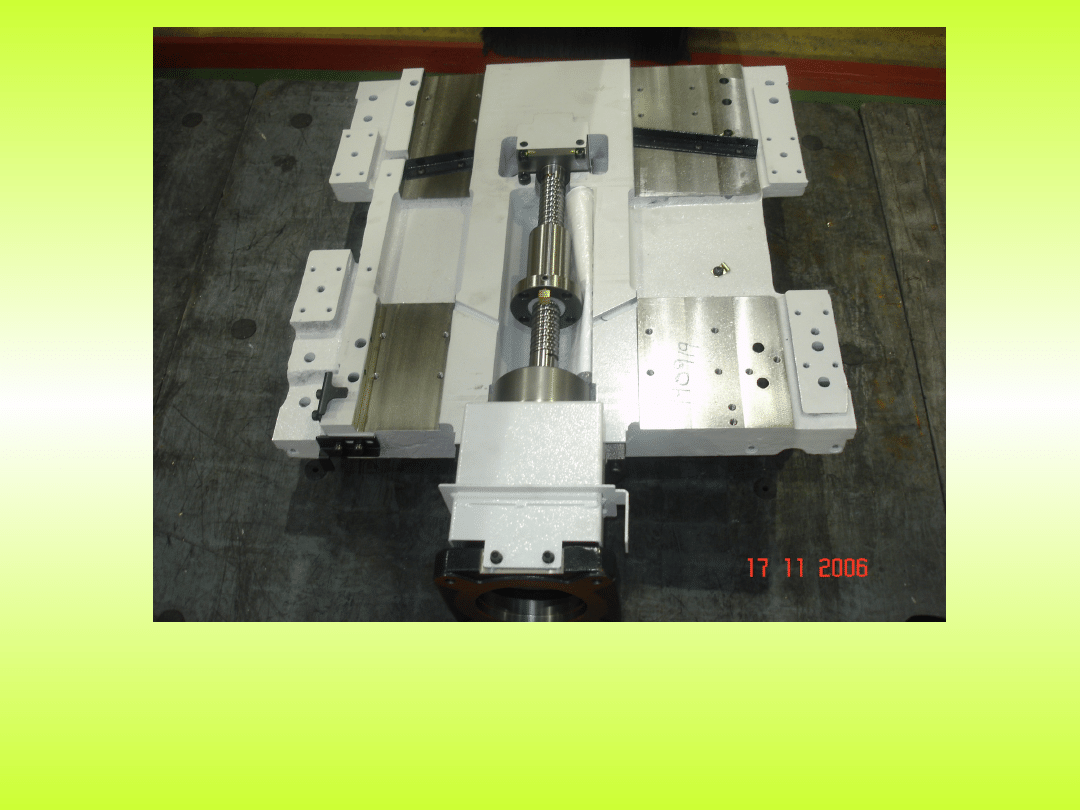
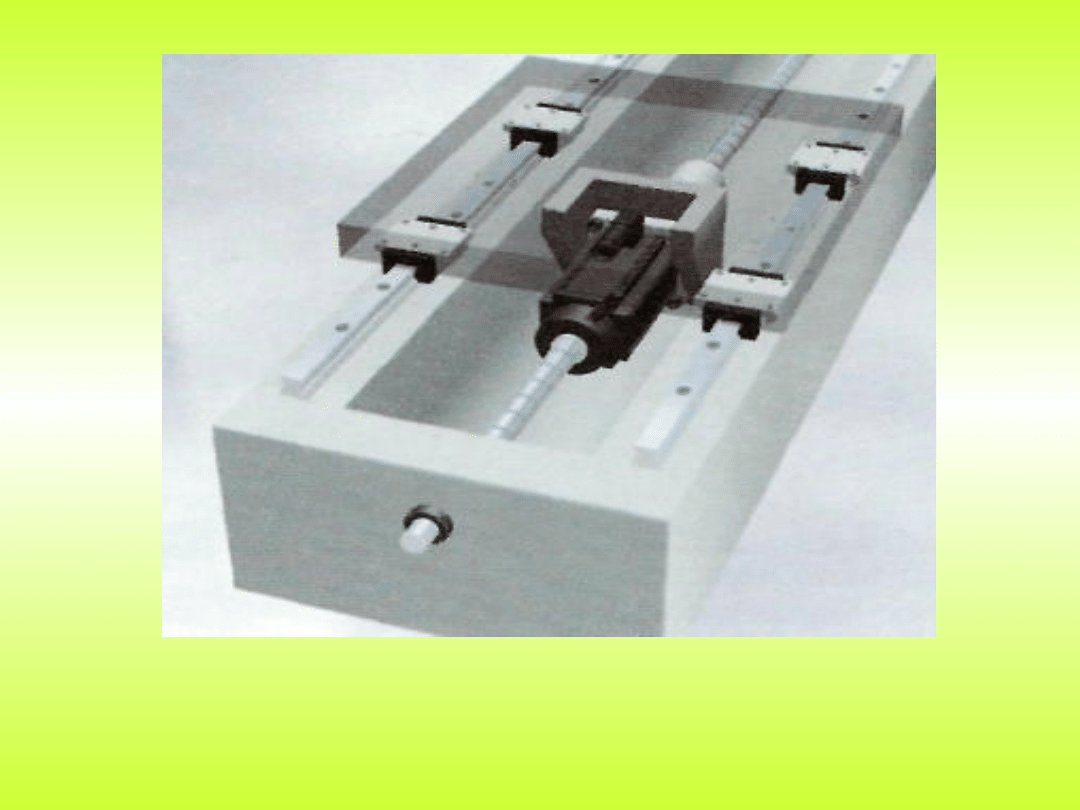
Rys. 8. Napęd posuwu z przekładnią śrubowo-toczną z obracającą się śrubą
(widok)

Rys. 9. Napęd posuwu z przekładnią śrubowo-toczną z obracającą się śrubą
(widok)

Wady i zalety napędu mechanizmem śrubowo - tocznym z obracającą się
śrubą :
Zalety
•
odsunięcie źródła ciepła
jakim jest silnik od
struktury obrabiarki,
•
możliwość
optymalizowania
konstrukcji przez
stosowanie silników o
dużej prędkości obrotowej
współpracujących z
mechaniczną przekładnią,
•
możliwość wariantowania
konstrukcji przy
stosunkowo niewielkich
kosztach
Wady
•
ograniczona trwałość
spowodowana
zużywaniem się
elementów napędu,
•
nieliniowość w
elementach
mechanicznych,
•
nagrzewanie się śruby i
związane z tym
odkształcenia cieplne.
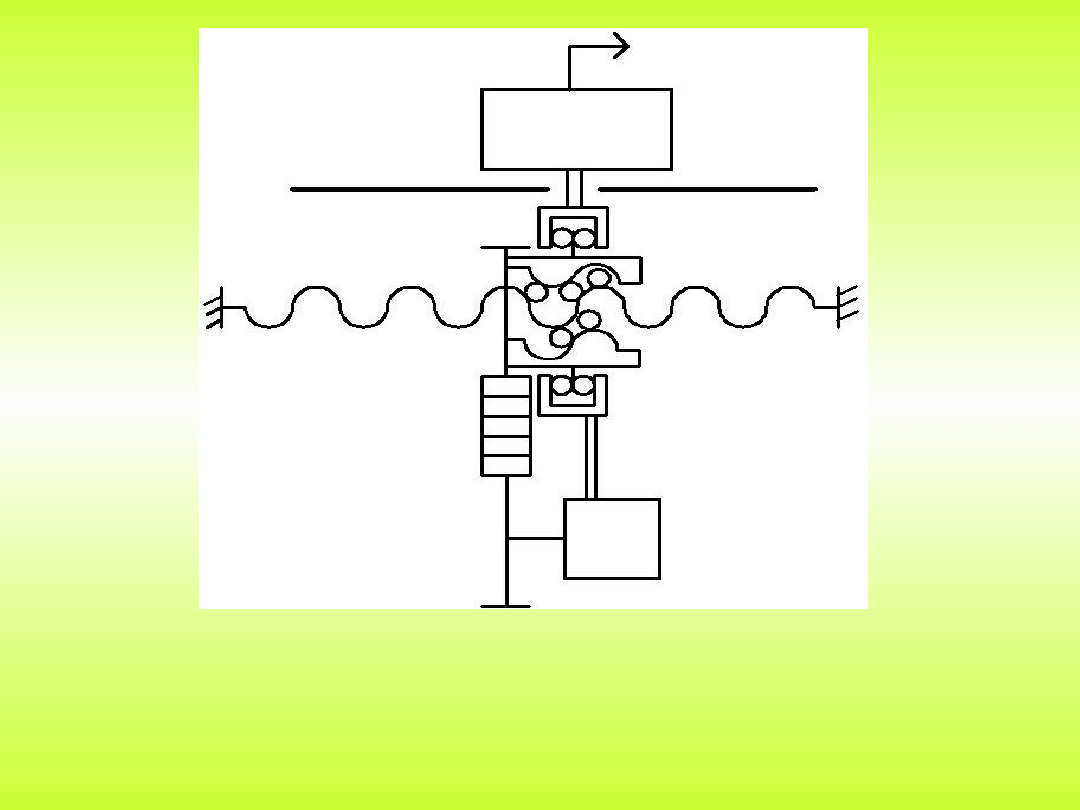
Rys. 10. Napęd posuwu z przekładnią śrubowo-toczną z nieruchomą śrubą i
nakrętką napędzaną paskiem zębatym
n
s
Przekładnia
paskowo-zębata
Silnik
Przekładnia śrubowo-
toczna
Zespół
przesuwny
i
V
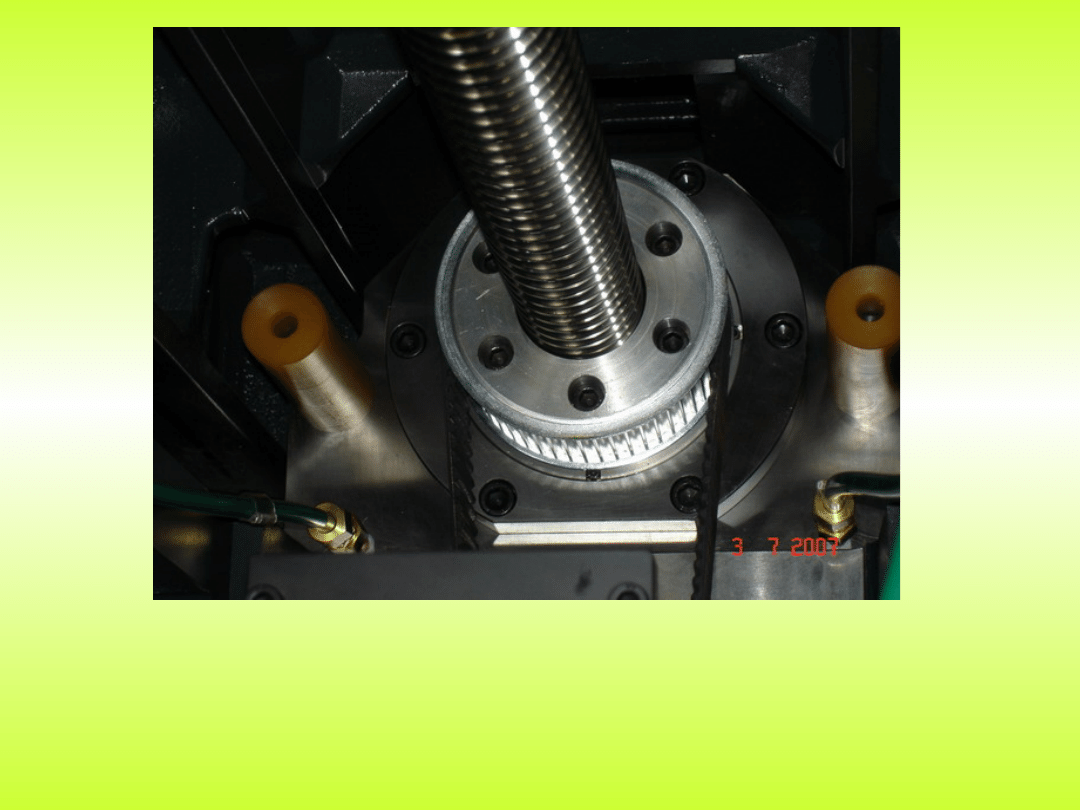
Rys. 11. Napęd posuwu z przekładnią śrubowo-toczną z nieruchomą śrubą i
nakrętką napędzaną paskiem zębatym (widok)
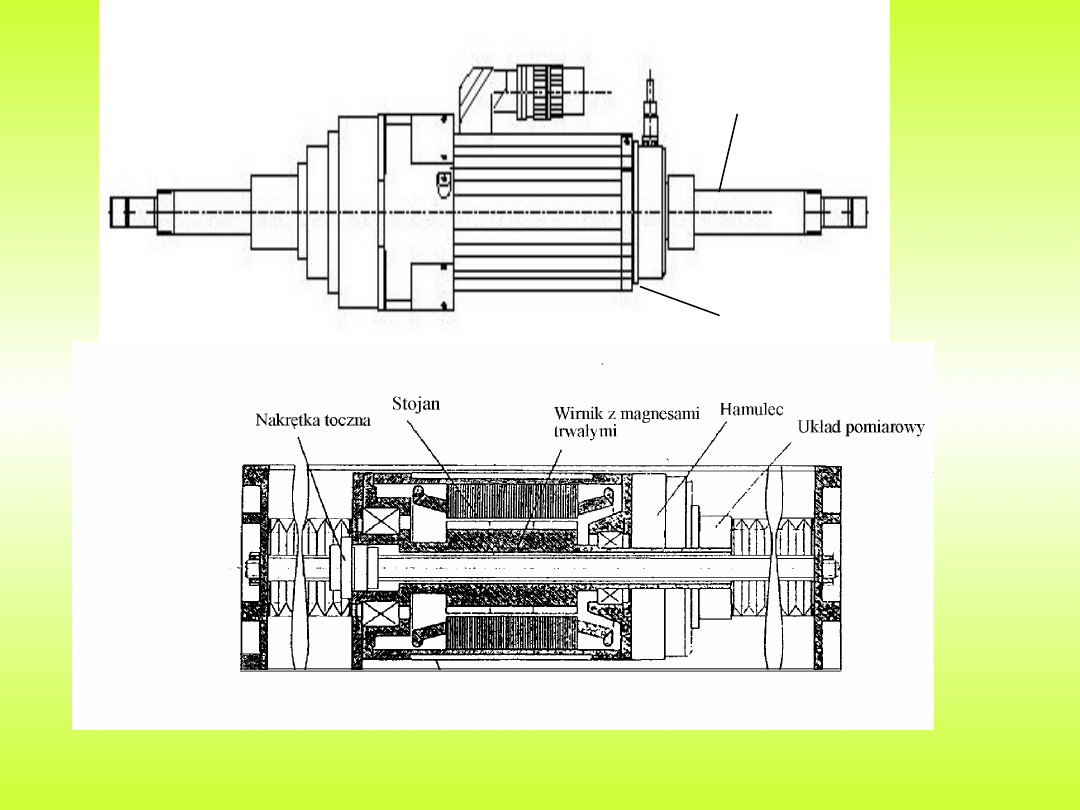
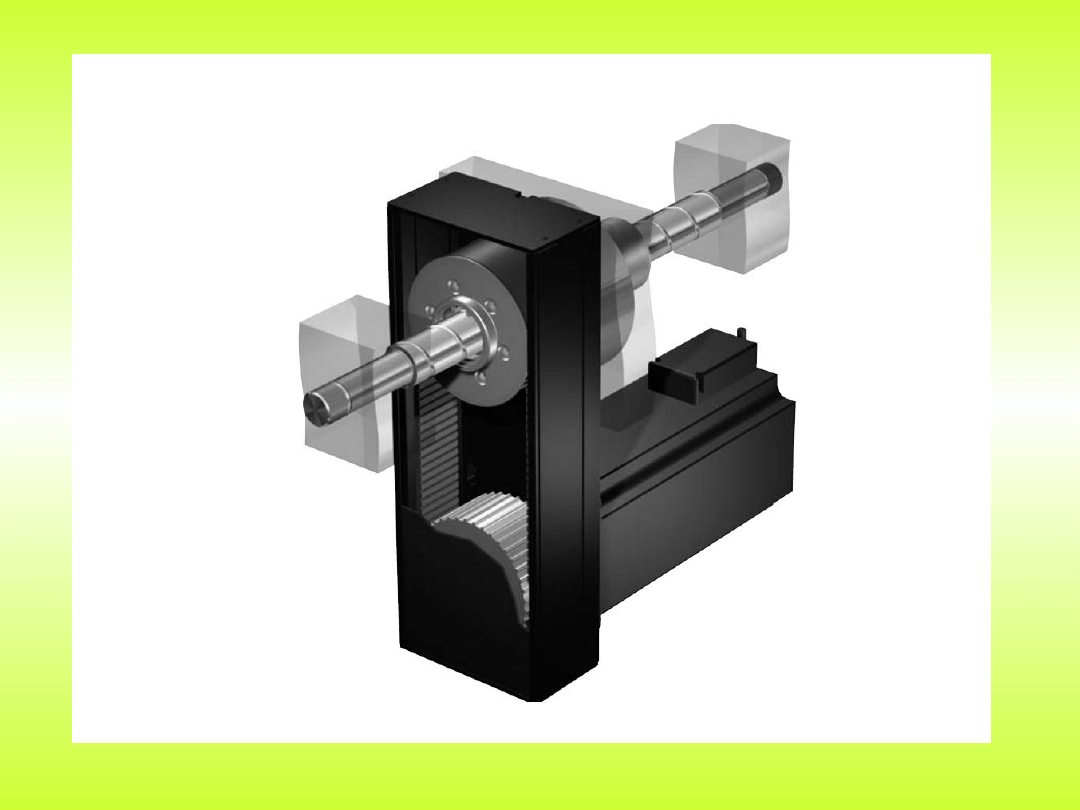
Rys. 12. Moduł posuwowy z elektronakrętką: a – widok, b -
przekrój
Śruba
Elektronakrętka
a)
b)
Rys. 13. Moduł posuwowy z elektronakrętką
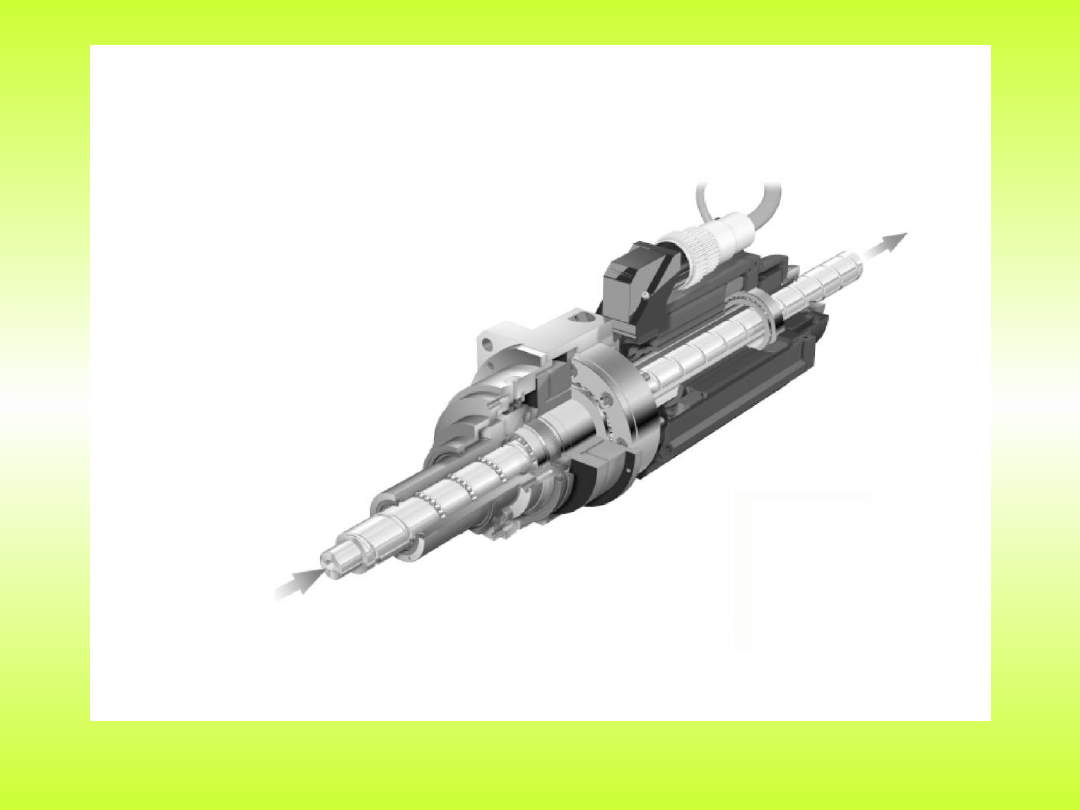

Wady i zalety napędu posuwu mechanizmem śrubowo - tocznym z
nieobracającą się śrubą
Zalety
•
brak łożysk – śruba
nieruchoma,
•
duża sztywność –
zamocowanie śruby na
jej obu końcach i
wstępne jej napięcie
•
prędkości liniowe do
120 m/min,
•
przyśpieszenia do 20
m/s
2
,
Wady
•
ograniczenie
geometryczne wynikające
ze średnicy śruby tocznej,
średnica śruby musi być
od 2 do 3 razy mniejsza od
średnicy nakrętki.
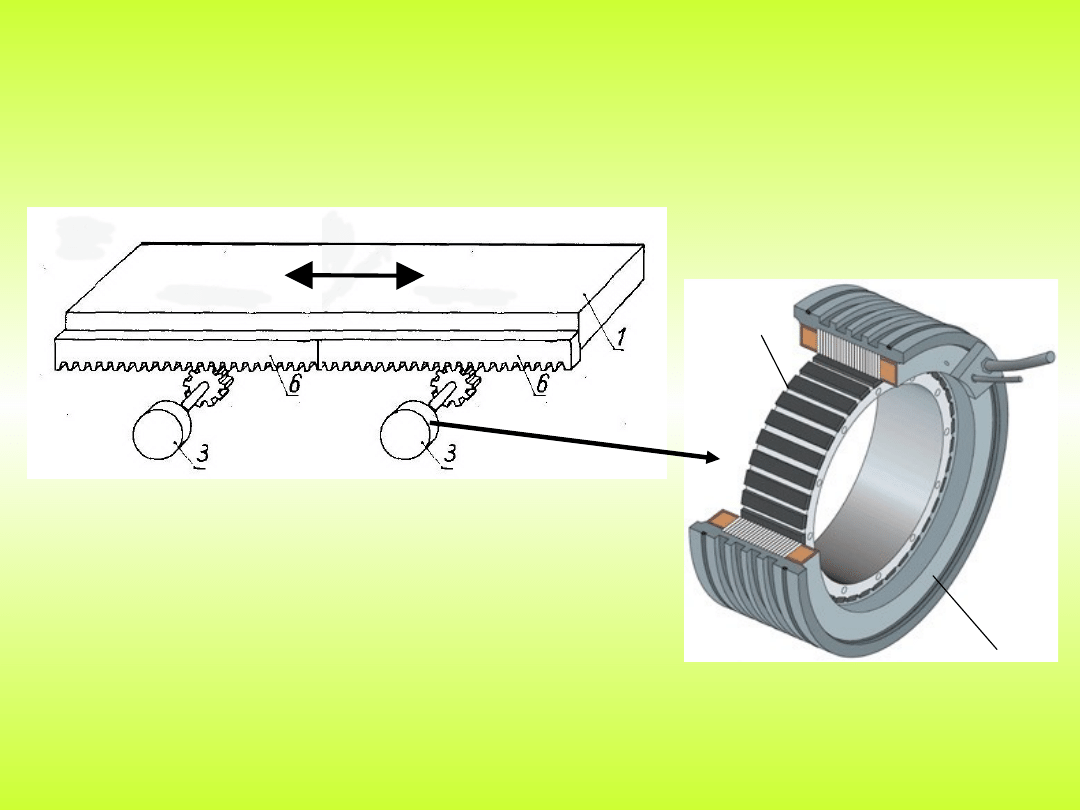
Napęd zębatkowy
Zębatkowy napęd jest stosowany w obrabiarkach, w których jest duży
zakres przesuwu (powyżej 3 m), a jednocześnie potrzebna duża
dokładność i powtarzalność pozycjonowania.
Rys. Zębatkowy napęd posuwu: 1 – zespół
przesuwny, 3 - dwa silniki momentowe, 6 –
zębatka segmentowa
Wirnik
Stojan
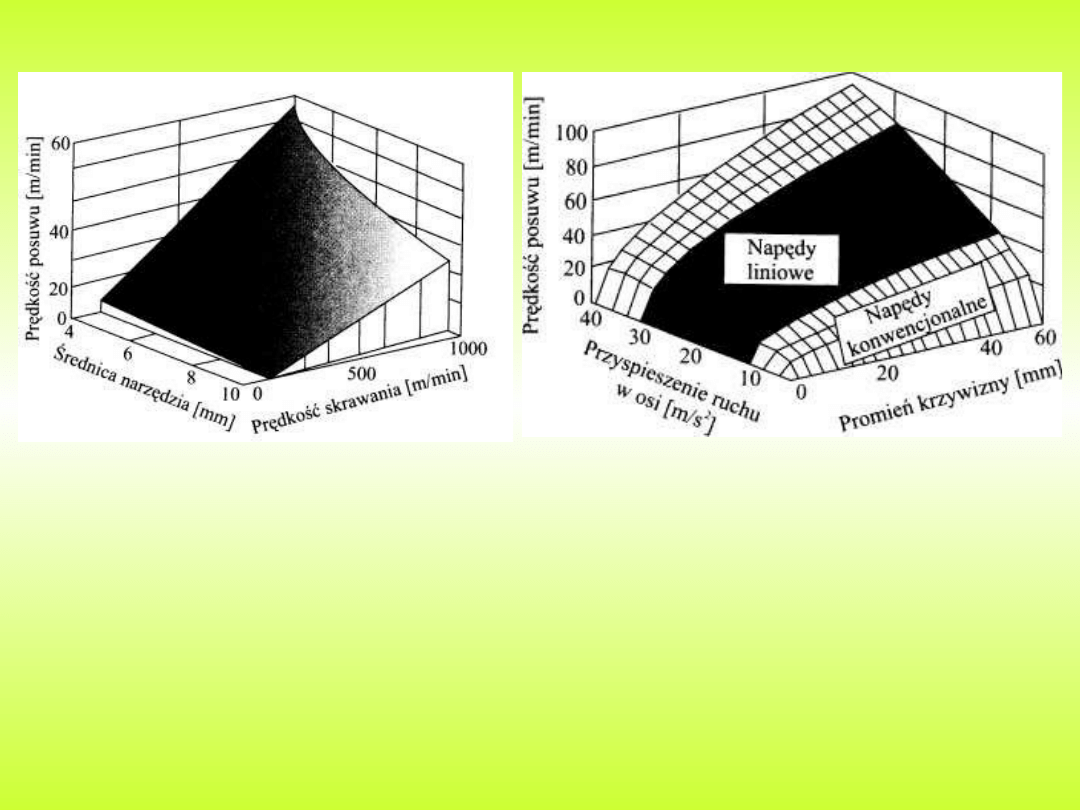
Rys. 7.8. Wymagania kinematyczne stawiane nowoczesnym
napędom ruchu głównego i posuwowego wynikające z
kryteriów technologicznych dotyczące: a) prędkości,
b) przyśpieszeń w ruchu posuwowym
a
)
b
)

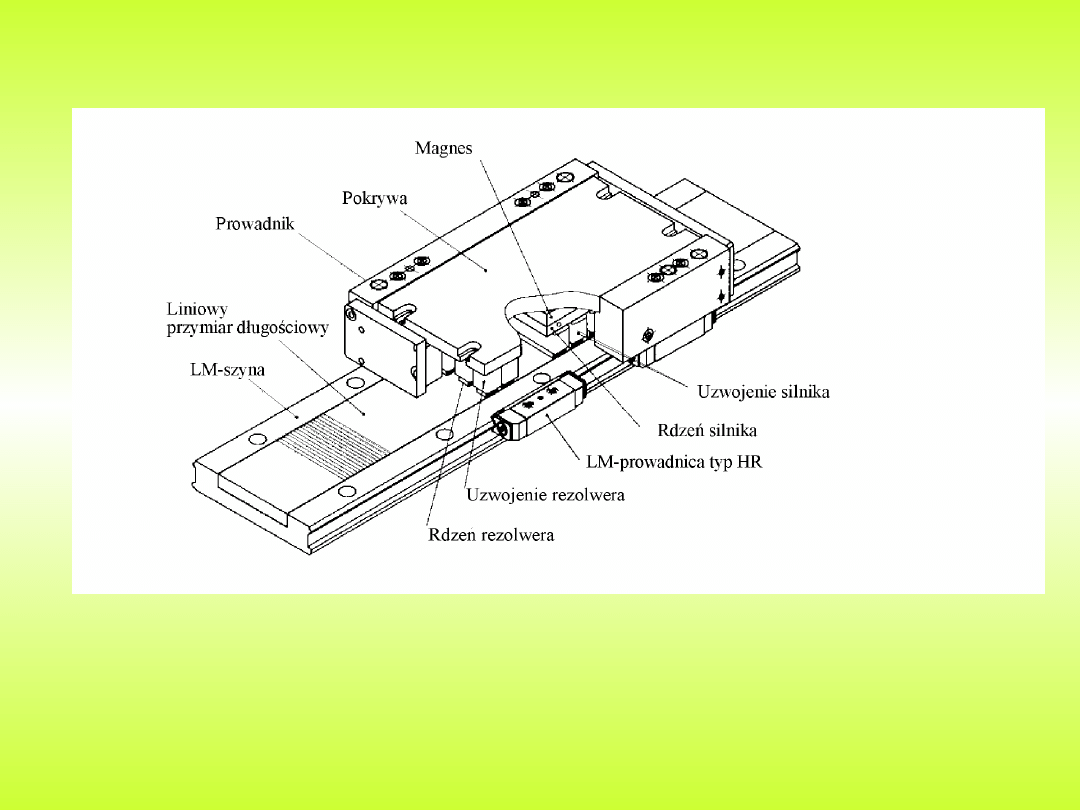
Zalety i wady zastosowania napędów liniowych
Zalety
•
bardzo wysoka
powtarzalność i
dokładność
pozycjonowania,
•
wysoka niezawodność
(brak części zużywających
się),
•
możliwość uzyskania
wysokich prędkości ruchu
posuwowego i
przesuwowego.
Wady
•często zbyt duża objętość i
duża masa własna
(niekorzystny stosunek masy
do siły napędowej),
•źródło ciepła znajduje się
wewnątrz maszyny,
•konieczność zastosowania
obcego chłodzenia,
•wrażliwość na zmienne
obciążenia,
•utrudnienia w zastosowaniu
w osiach pionowych,
•wysoki koszt.
Tab. 7.1. Maksymalne parametry serwonapędów posuwu
Rodzaj napędu
Max przyśpieszenie
a
m/s
2
Max prędkość
przesuwu
(posuwu)
V
m/min
Współczynnik
wzmocnienia
prędkościowego
K
V
1/s
Sztywność
osiowa
k
S
N/m
Silnik obrotowy
napędzana
śruba toczna
<10
więcej tylko dla dużych
skoków śruby
ok. 60
20 -100
<100
Elektronakrętka
śruba toczna
nieobrotowa
<15
więcej tylko dla dużych
skoków śruby
120
>100
>100
Bezpośredni
napęd liniowy
25-40
z chłodzeniem
powietrzem
50-140
z chłodzeniem cieczą
> 90
200 - 500
_
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
Wyszukiwarka
Podobne podstrony:
Układy Napędowe oraz algorytmy sterowania w bioprotezach
4 Główne układy napędowe
dudziński,układy napędowe,Hamowanie elektryczne silników indukcyjnych
dudziński,układy napędowe,Sprowadzenie momentów mechanicznych
uklady napedowe 3
dudziński,układy napędowe,Rozruch silników indukcyjnych pierścieniowych
Zawory hydrauliczne, PWR, hydrostatyczne układy napędowe, pomoce naukowe
dudziński,układy napędowe, opracowanie pytań kolokwium
dudziński,układy napędowe,Metody kształtowania przebiegu charakterystyk mechanicznych silnika indukc
Uklady napedowe 2 lab, LABKA
dudziński,układy napędowe, Podstawy napędu hydrostatycznego
Układy napędowe i wzmacniacze, Mechatronika
Amplidyna, ►Studia, Semestr 8, Układy Napędowe Robotów
dudziński,układy napędowe,Charakterystyki mechaniczne silnika szeregowego prądu stałego
więcej podobnych podstron