
Teoria ruchu samochodu
Andrzej Reński
Warszawa 2006

Teoria ruchu samochodu
Opis ruchu samochodu z
wykorzystaniem praw mechaniki

Teoria ruchu samochodu
• Współpraca opony z nawierzchnią
• Ruch prostoliniowy z napędem
• Ruch prostoliniowy z hamowaniem
• Ruch krzywoliniowy
• Drgania
Współpraca
opony z
nawierzchnią
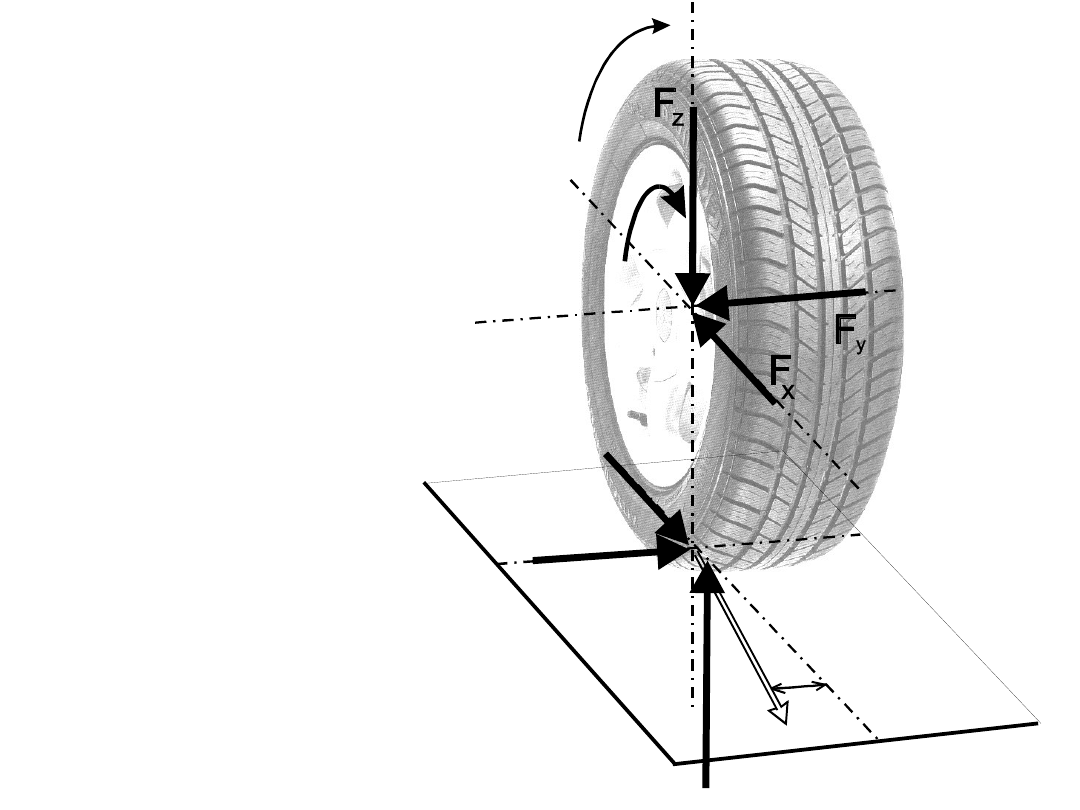
Z
Y
v
M
X
Siły działające na
koło
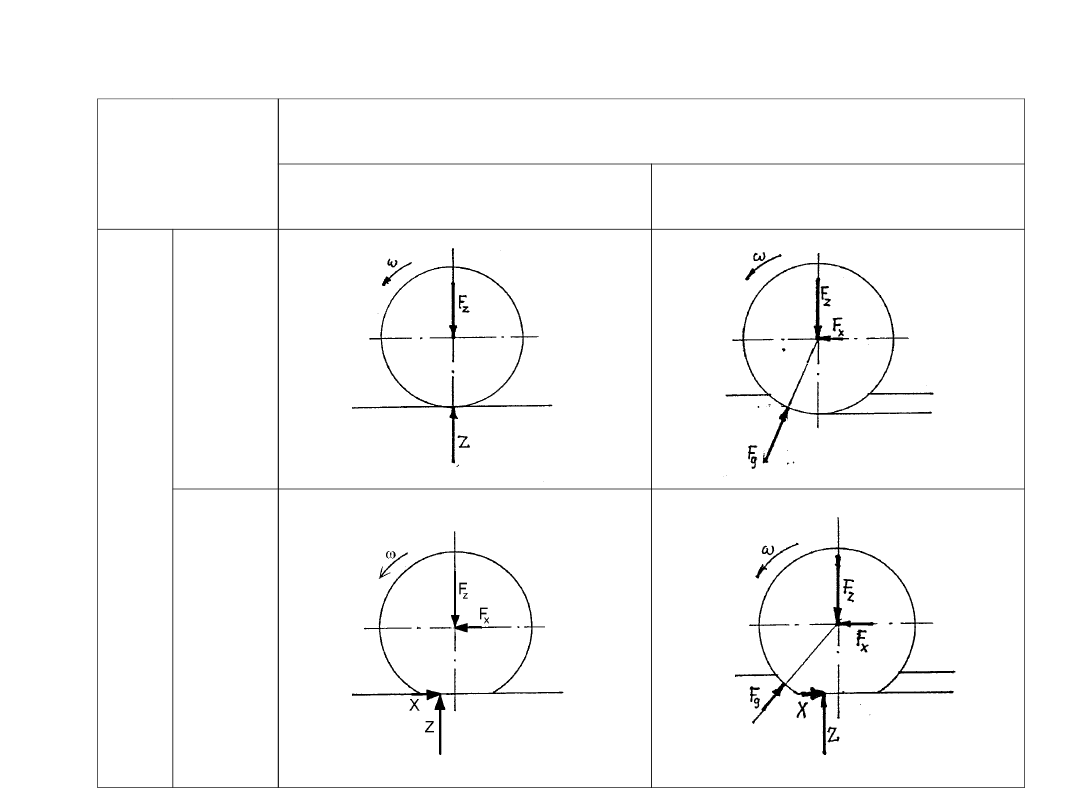
Współpraca opony z nawierzchnią
Nawierzchnia
sztywna
odkształcalna
K
o
ło
e
la
st
y
cz
n
e
sz
ty
w
n
e
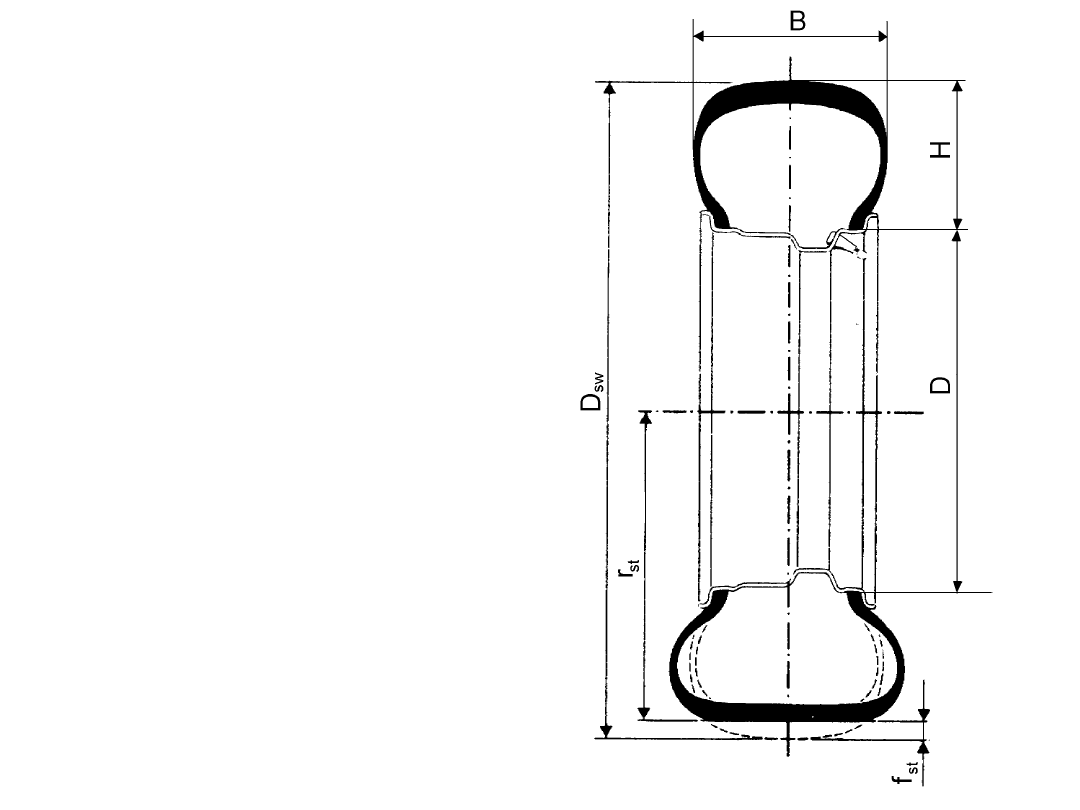
Wymiary
opony
D – średnica nominalna (równa
średnicy nominalnej obręczy),
B – szerokość nominalna,
H – wysokość nominalna,
D
sw
– średnica swobodna,
r
st
– promień statyczny,
f
st
– statyczna strzałka ugięcia
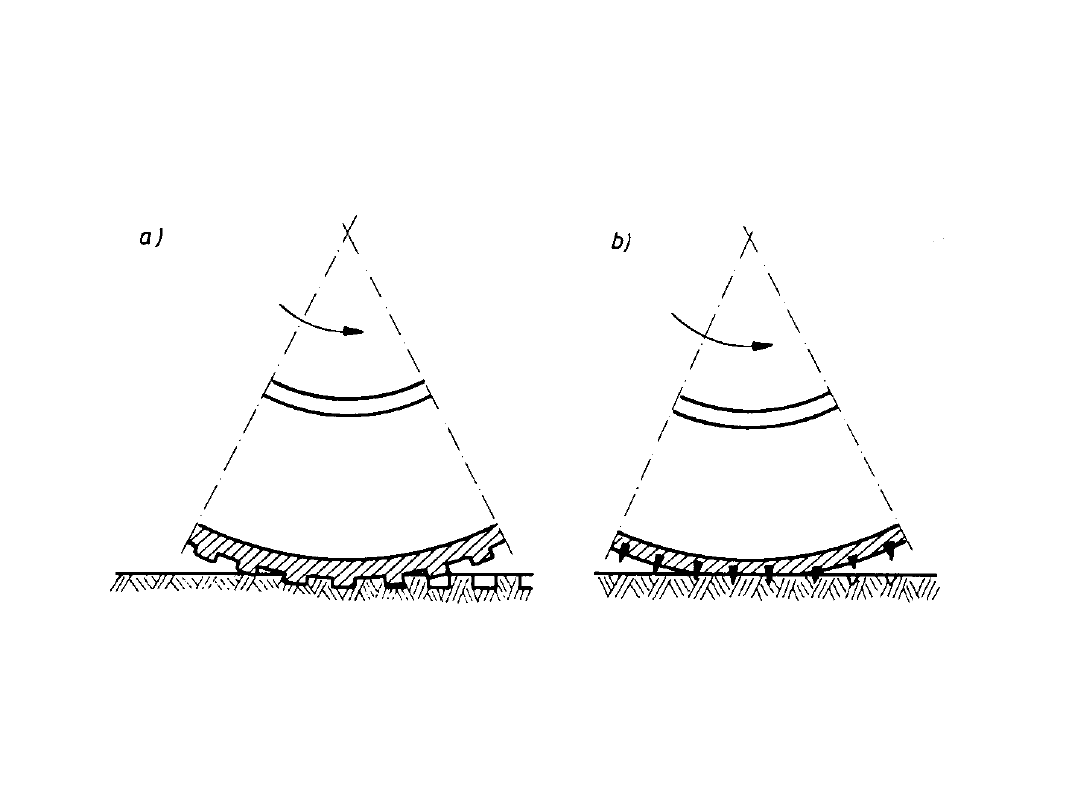
Przekazywanie sił między kołem
a nawierzchnią
Połączenie kształtowe koła z nawierzchnią

Promień koła, poślizg
r
stat
- promień statyczny: odległość środka koła od
środka styku opony z powierzchnią jezdni dla
nieruchomego koła
r
d
- promień dynamiczny: odległość środka koła od
płaszczyzny działania sił stycznych. Promień
dynamiczny rośnie wraz ze wzrostem prędkości
jazdy
C
R
obwód toczenia, czyli droga
przebyta w czasie jednego obrotu koła
r
t
- promień toczny: stosunek prędkości
postępowej środka koła v
k
do jego prędkości
kątowej ω
k
2
C
r
R
d
k
k
t
v
r
Promień koła, poślizg
Poślizg dla koła hamowanego – stosunek różnicy
prędkości postępowej i prędkości obwodowej koła
do prędkości postępowej
Poślizg dla koła napędzanego - stosunek różnicy
prędkości obwodowej koła r
d
ω
k
i prędkości
postępowej jego środka v
k
do prędkości obwodowej
koła
k
d
k
k
d
r
v
r
S
k
k
d
k
v
r
v
S
Przekazywanie sił między kołem
a nawierzchnią
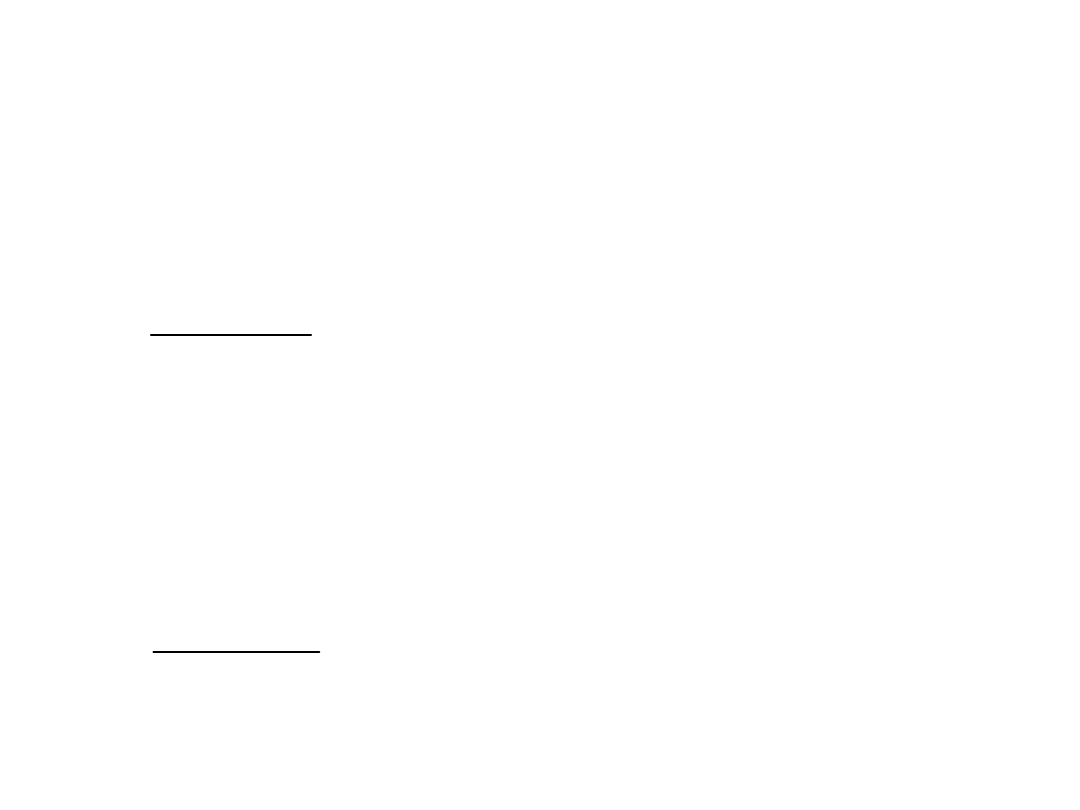
Względna wzdłużna siła przyczepności (współczynnik
przyczepności wzdłużnej) μ
x
w funkcji poślizgu S
μ
xm
– współczynnik
przyczepności przylgowej
wzdłużnej
μ
xs
- współczynnikiem
przyczepności poślizgowej
wzdłużnej
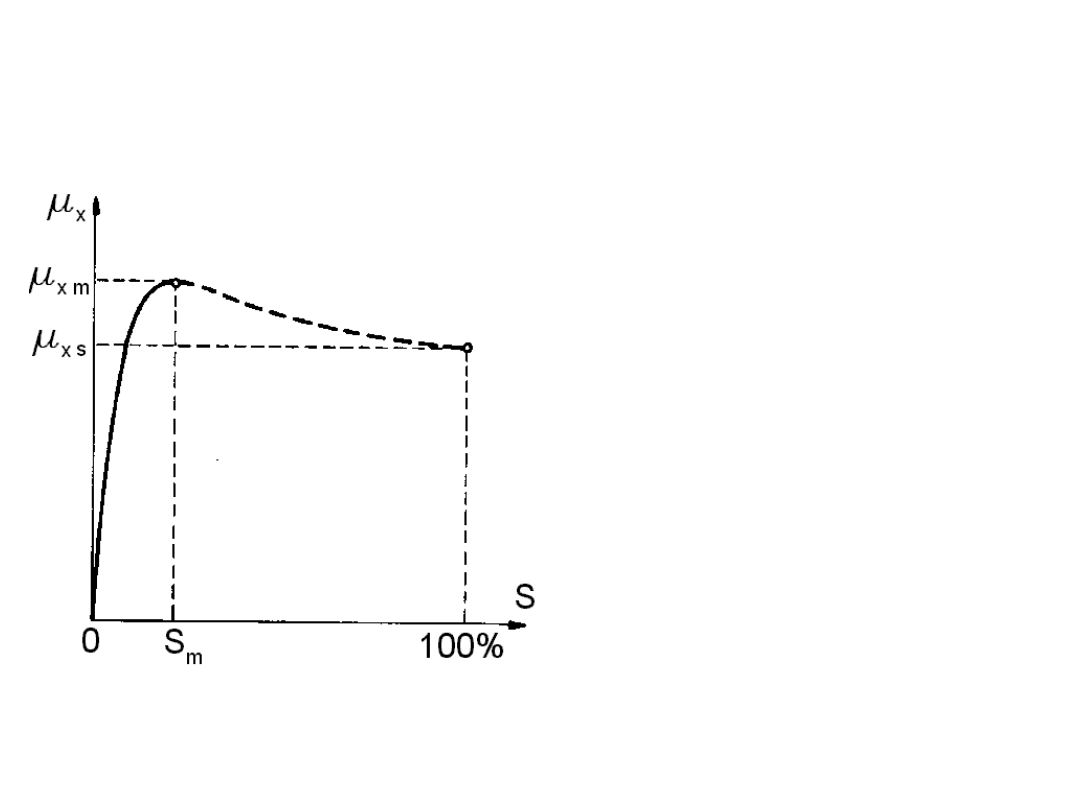
Przekazywanie sił między kołem
a nawierzchnią
1 ‑ suchy asfalt,
2 – mokry asfalt,
3 – nieutwardzony żwir,
4 – sypki śnieg,
5 – gołoledź,
Wykresy przebiegu
względnej siły
przyczepności
wzdłużnej w funkcji
poślizgu dla różnych
nawierzchni:

Opory ruchu samochodu
F
n
= F
t
+ F
p
+ F
b
+ F
w
F
n
– Siła napędowa
F
t
– Siła oporu toczenia
F
p
– Siła oporu powietrza
F
b
– Siła oporu bezwładności
F
w
– Siła oporu wzniesienia
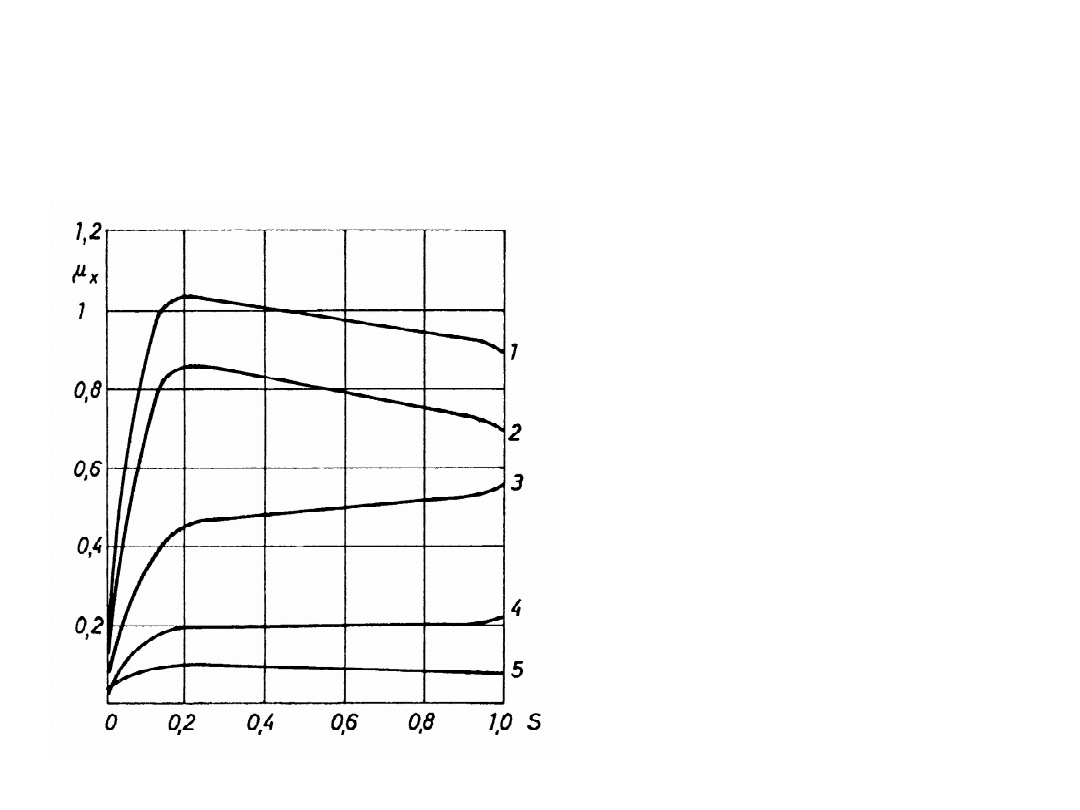
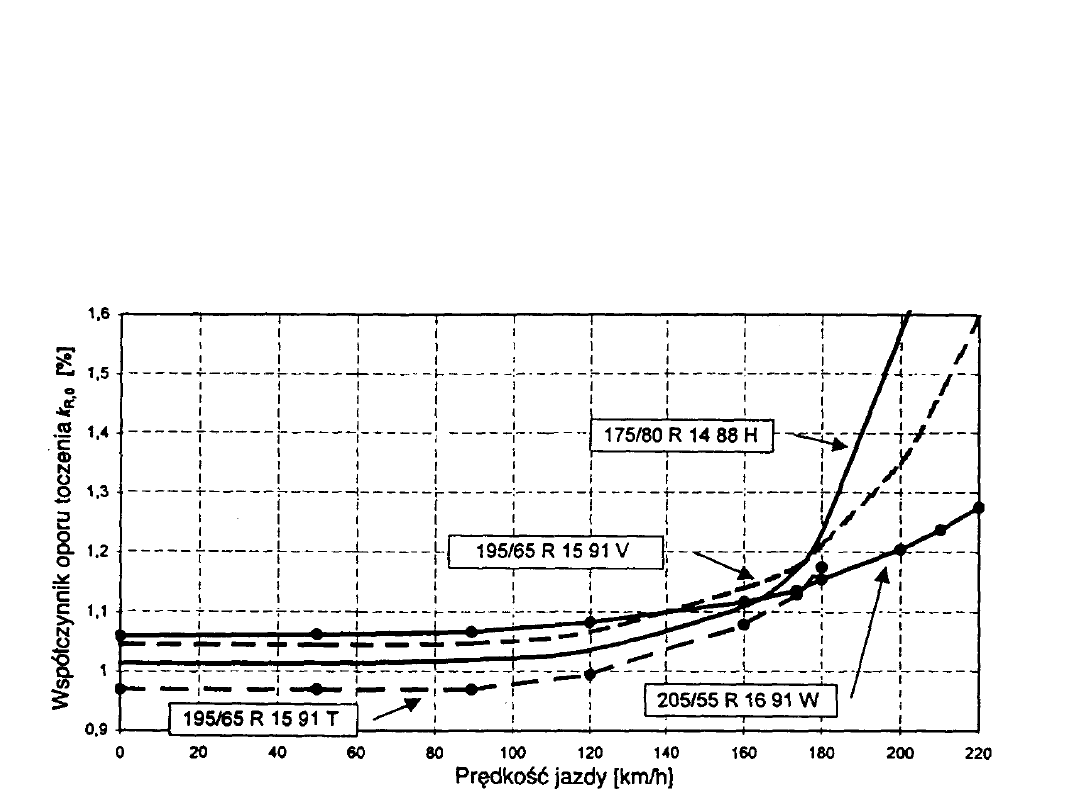
Opór toczenia koła
M
t
= Z e
x
d
x
x
r
e
Z
F
d
x
t
r
e
f
Współczynnik
oporu
toczenia:
Siła oporu
toczenia: F
t
=
Z f
t
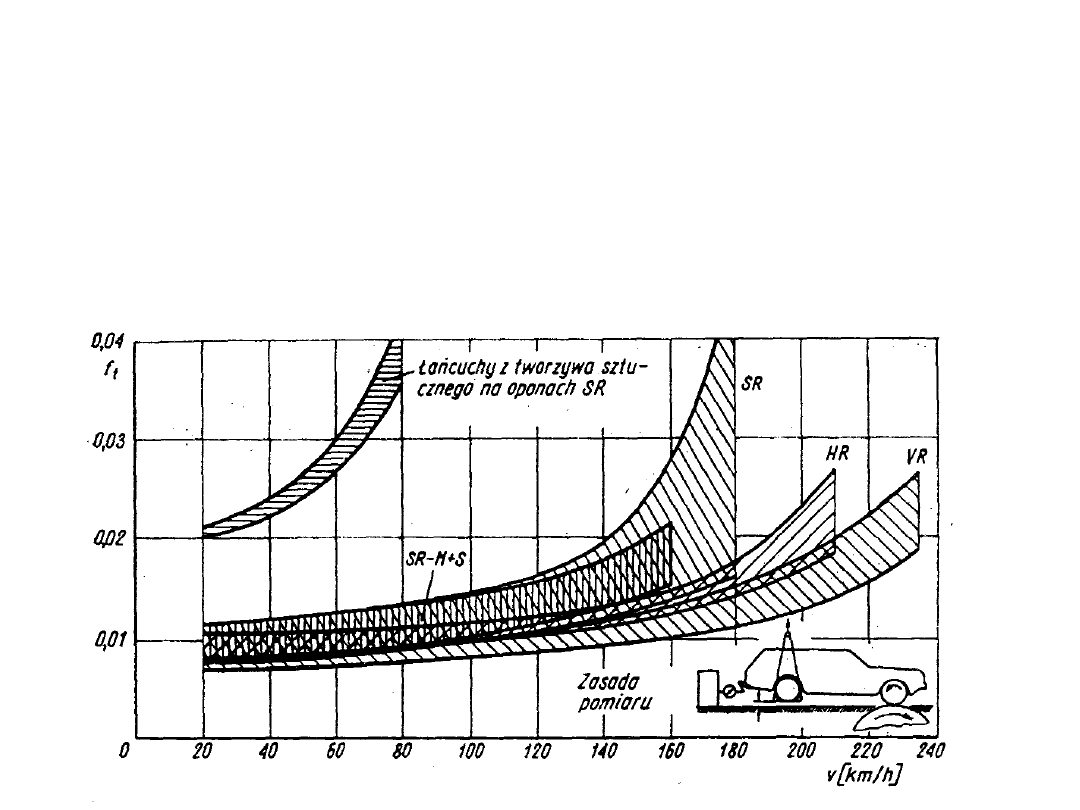
Opory ruchu samochodu
F
t
– Siła oporu toczenia
F
t
= m g f
t
[N]
f
t
= f
0
(1 + k
v
v
2
) ,
k
v
= 5·10
-5
;
Opory ruchu samochodu
F
t
– Siła oporu toczenia
F
t
= m g f
t
[N]
f
t
= f
0
(1 + k
v
v
2
) ,
k
v
= 5·10
-5
;
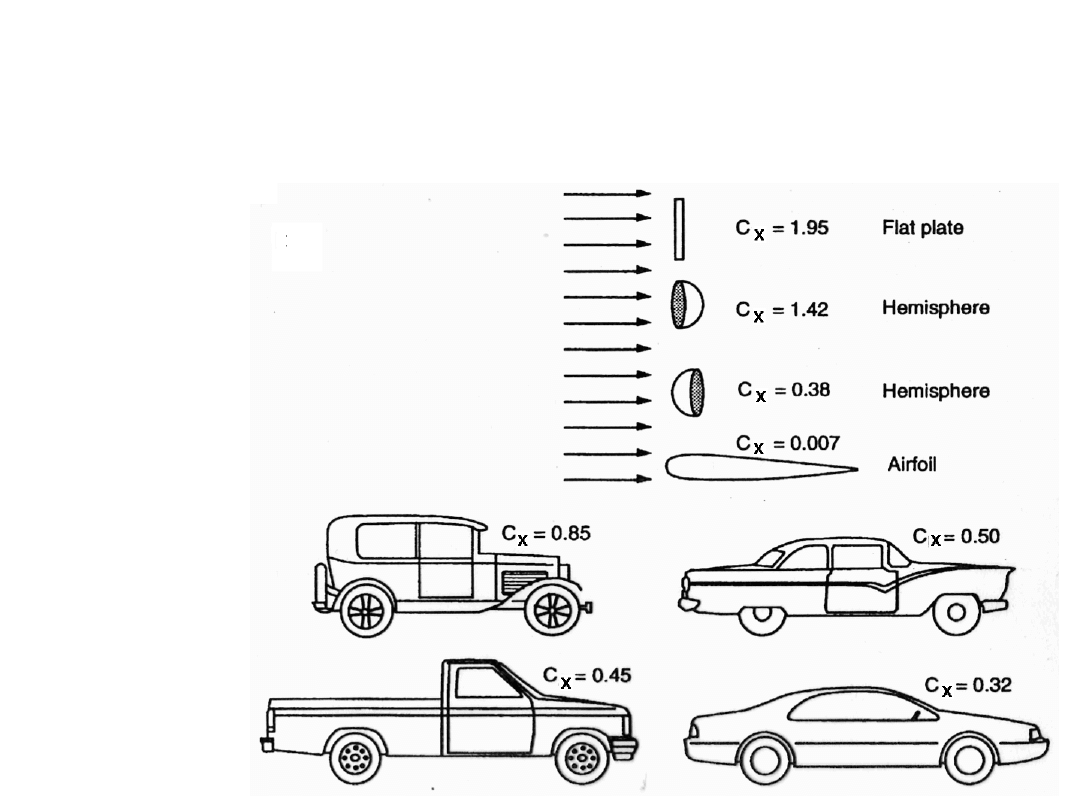
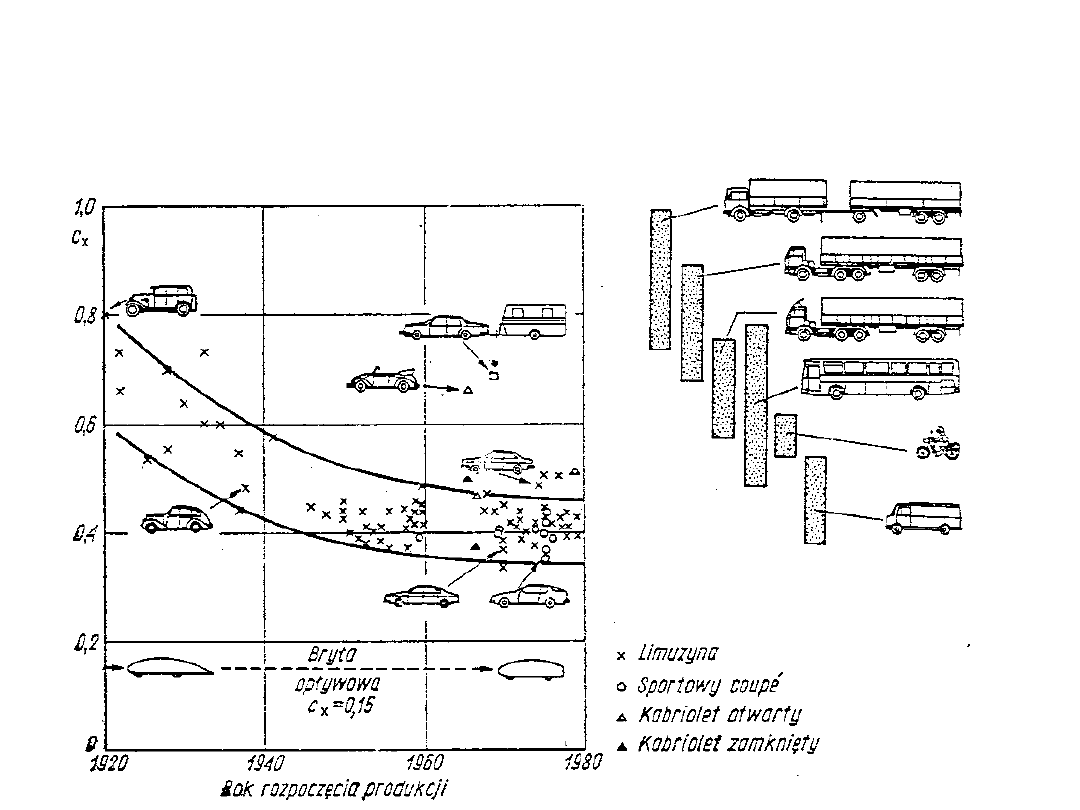
Opory ruchu samochodu
F
p
– Siła oporu powietrza
F
p
= 0,047 A c
x
v
2
[N]
Opory ruchu samochodu
F
p
– Siła oporu powietrzaF
p
= 0,047 A c
x
v
2
[N]
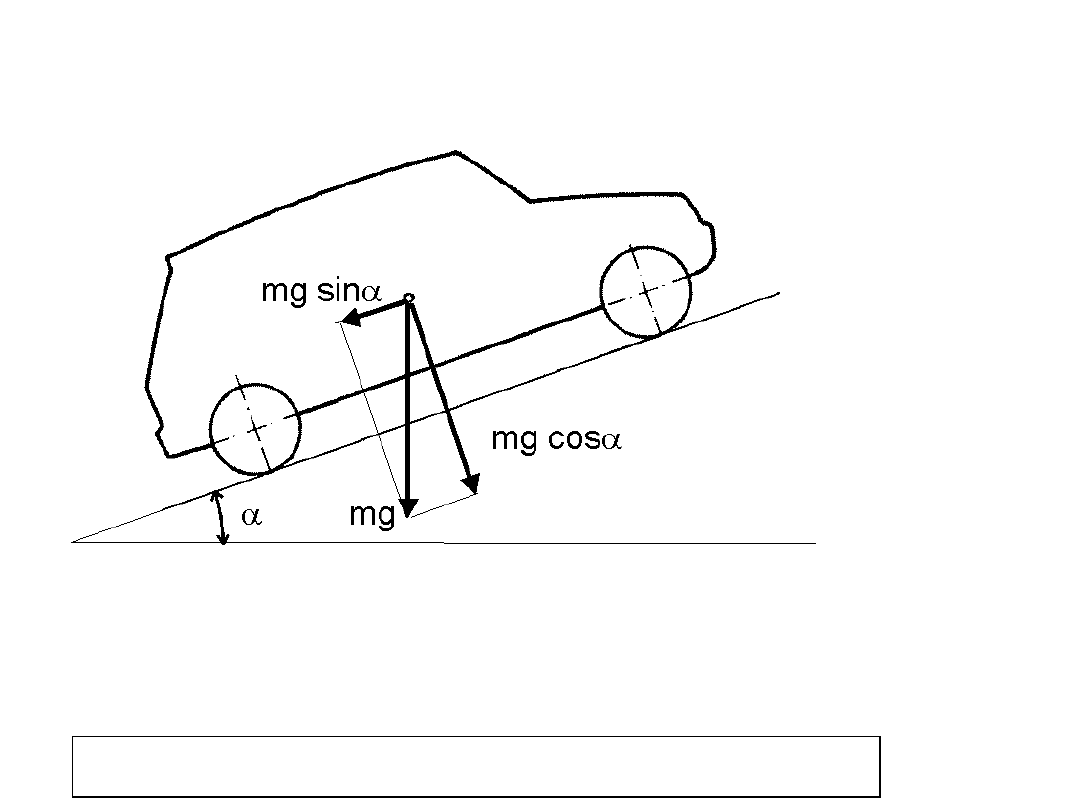
Opory ruchu samochodu
Siła oporu wzniesienia F
w
= mg sin
Dla małych kątów sin= = tg
Podłużne narcylenie drogi w = tg
Siła oporu wzniesienia F
w
= m g w
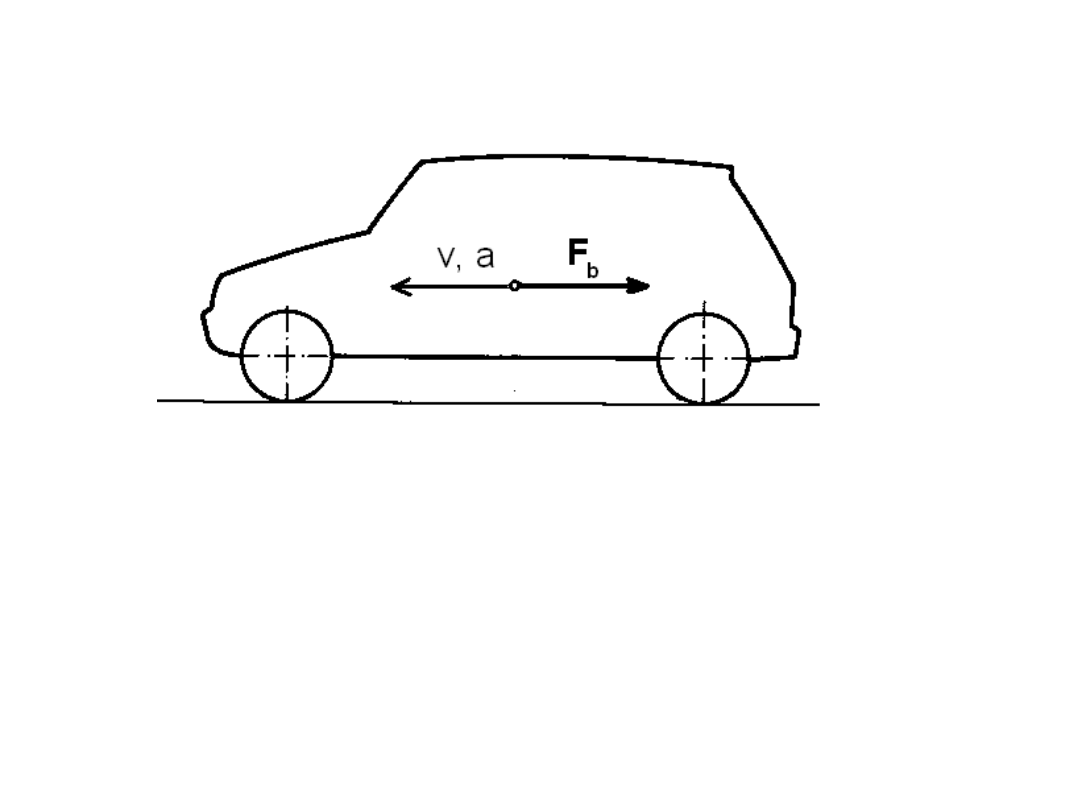
Opory ruchu samochodu
Siła oporu bezwładności: F
b
= m a
(?
)
v – prędkość pojazdu
a - przyśpieswzenie
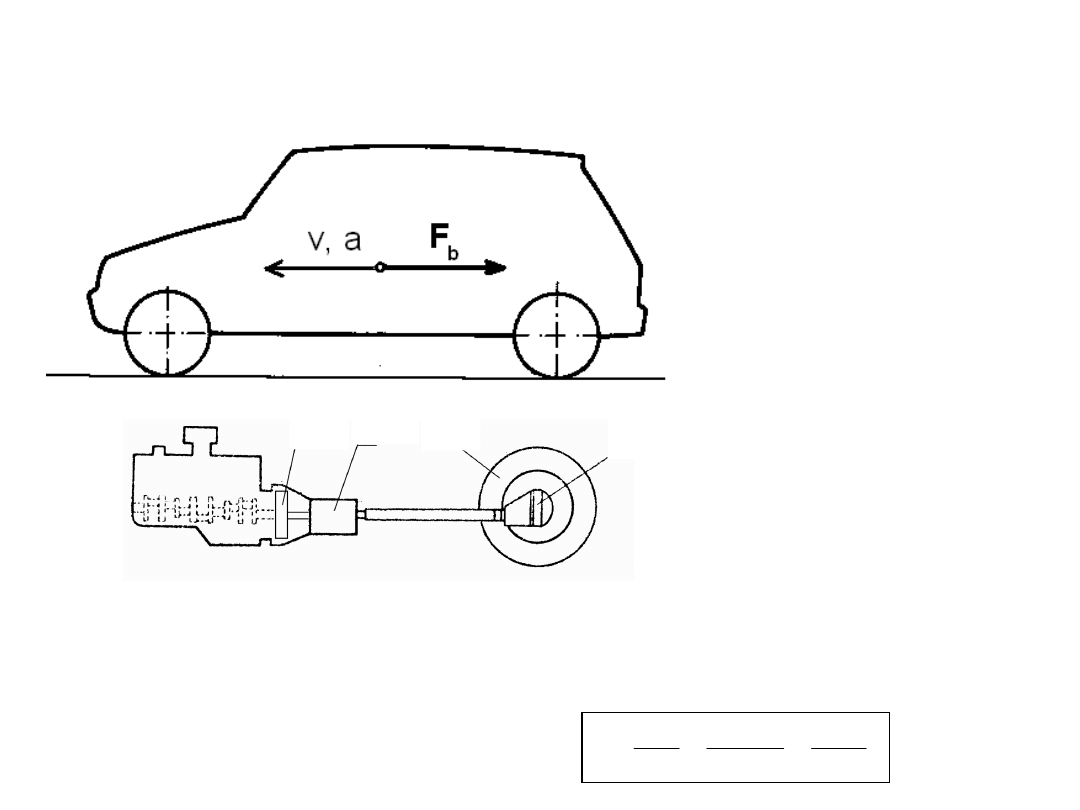
Opory ruchu samochodu
i
g
J
k
J
s
i
b
J
s
– moment
bezwładności wirujących
części silnika
J
k
– moment
bezwładności koła
i
b
– przełożenie skrzyni
biegów
i
g
– przełożenie
przekładni głównej
ε
s
– przyśpieszenie
kątowe silnika
ε
k
– przyśpieszenie
kątowe koła
r
d
– promień dynamiczny
Moment oporu bezwładności wirujących części silnika: M
bs
= J
s
ε
s
Zredukowany na oś kół: M
bs,k
= J
s
ε
s
i
b
i
g
= J
s
ε
k
i
b
2
i
g
2
Zredukowany do ruchu
postępowego:
a
r
i
i
J
r
i
i
J
r
M
F
2
d
2
b
2
g
s
d
2
b
2
g
k
s
d
k
,
bs
bs
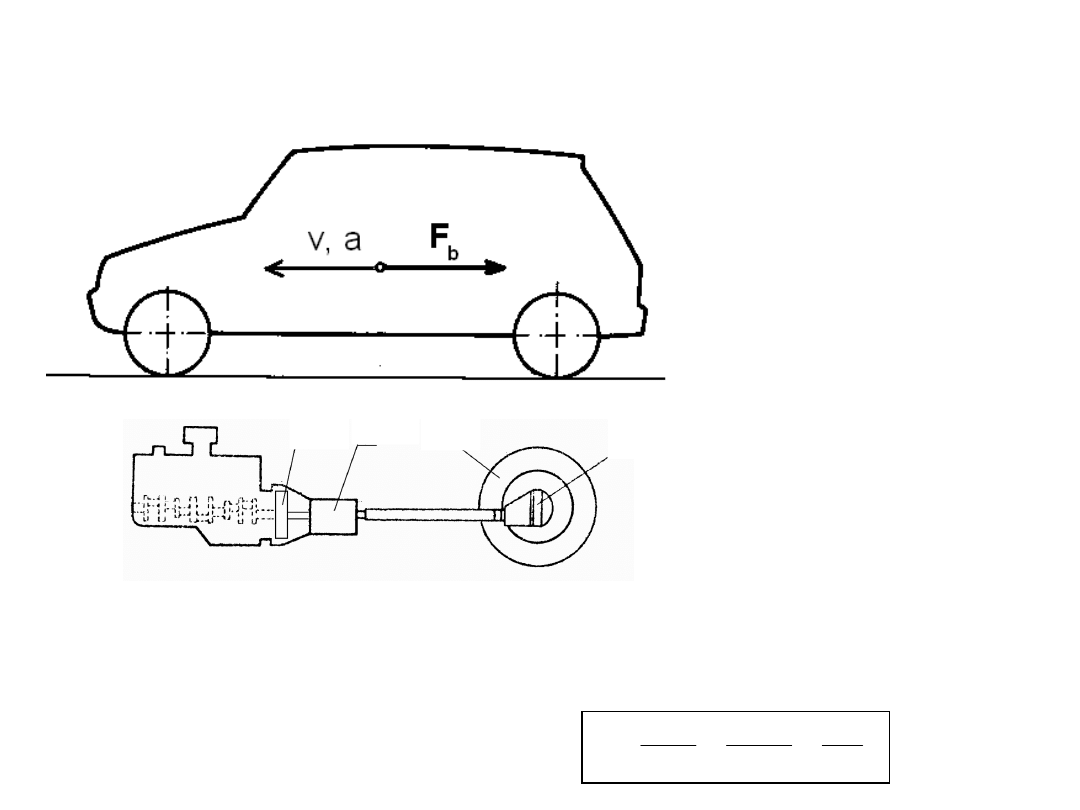
Opory ruchu samochodu
i
g
J
k
J
s
i
b
J
s
– moment
bezwładności wirujących
części silnika
J
k
– moment
bezwładności koła
i
b
– przełożenie skrzyni
biegów
i
g
– przełożenie
przekładni głównej
ε
s
– przyśpieszenie
kątowe silnika
ε
k
– przyśpieszenie
kątowe koła
r
d
– promień dynamiczny
Moment oporu bezwładności koła: M
bk
= J
k
ε
k
Dla wszystkich n kół: M
bk
n = J
k
ε
k
n
Zredukowany do ruchu
postępowego:
a
r
n
J
r
n
J
r
n
M
F
2
d
k
d
k
k
d
bk
bk
Opory ruchu samochodu
a
r
n
J
a
r
i
i
J
a
m
F
2
d
k
2
d
2
b
2
g
s
b
2
d
k
2
b
2
d
2
g
s
r
m
n
J
i
r
m
i
J
1
a
m
Całkowita siła bezwładności: F
b
= m a + F
bs
+ F
bk
Inaczej zapisując:
a
m
)
i
1
(
a
m
F
k
2
b
s
b
Gdzie: δ
s
- współczynnik mas wirujących silnika,
δ
k
– współczynnik mas wirujących kół
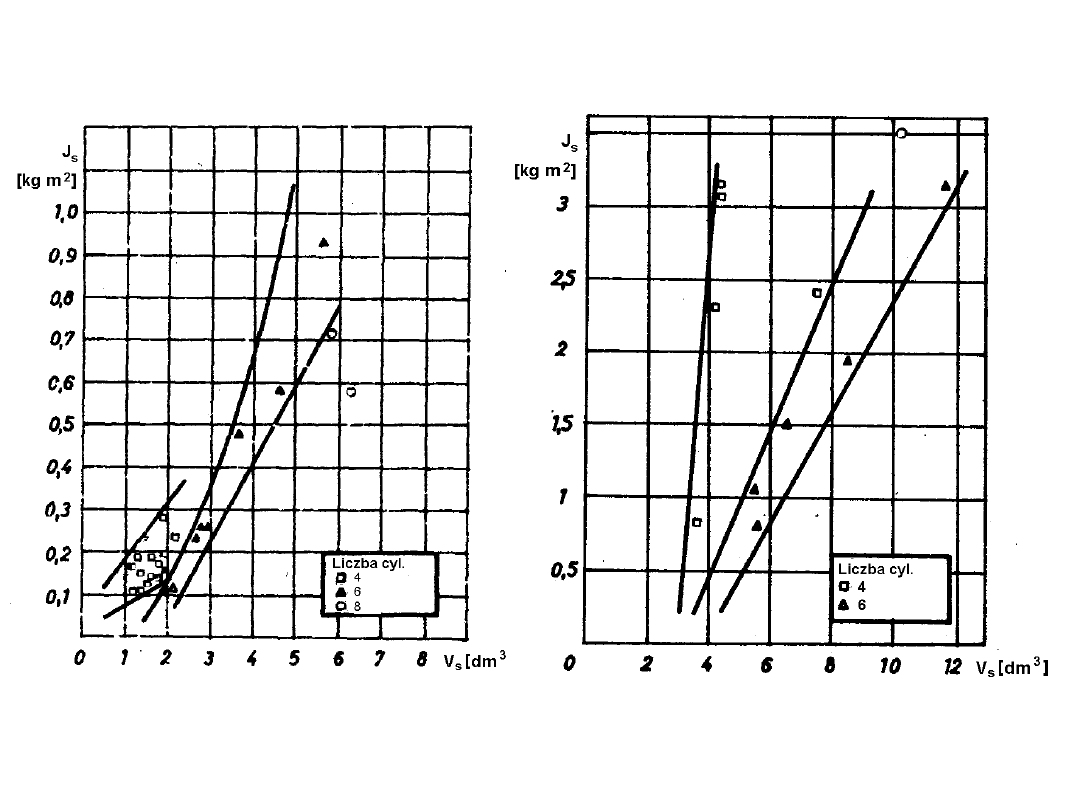
Wykresy do oszacowania momentu bezwładności części wirujących
silnika ZI (z lewej) i ZS (z prawej)
Opory ruchu samochodu
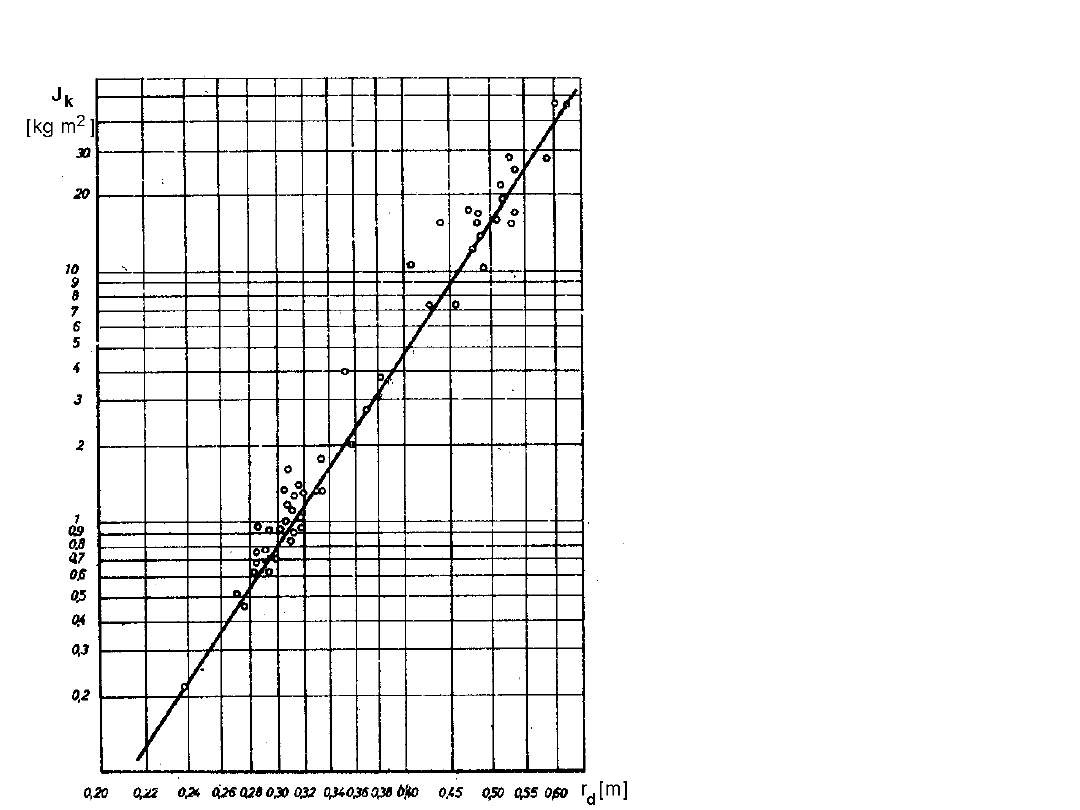
Opory ruchu samochodu
Wykres do oszacowania
momentu bezwładności
koła na podstawie wartości
promienia dynamicznego
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
Wyszukiwarka
Podobne podstrony:
TR opory ruchu
TR opory ruchu
Opory ruchu
F9 opory ruchu zredukowane
9. Opory ruchu, Fizyka - Lekcje
2 Opory ruchu
FM8 opory ruchu
f9 opory ruchu AXJK2BKIX6JTDCUJ Nieznany
opory ruchu w przewodach pod ciśnieniem
FM8 opory ruchu
Fizyka 1 11 opory ruchu id 1757 Nieznany
MF9 opory ruchu
Opory ruchu
F9 opory ruchu zredukowane
9. Opory ruchu, Fizyka - Lekcje
Opory ruchu w przewodach pod cisnieniem
2 Opory ruchu
więcej podobnych podstron