
Wykład 14
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2013/14
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej
Dynamika układu o jednym stopniu swobody
Drgania swobodne nietłumione i tłumione

Część 1
Drgania swobodne nietłumione
3
( )
( )
( )
( )
mq t
cq t
kq t
P t
+
+
=
&&
&
1.1. Równanie ruchu
Ogólne równanie ruchu układu materialnego o jednym stopniu swobody
W drganiach swobodnych nietłumionych przyjmuje się:
c = 0 , P(t) = 0
( )
( )
0
mq t
kq t
+
=
&&
Uwagi:
1. Drgania są wzbudzane przemieszczeniem i/lub prędkością początkową.
2. W rzeczywistości przypadek braku tłumienia nie jest możliwy.
3. Jest to równanie różniczkowe liniowe zwyczajne drugiego rzędu o stałych
współczynnikach
4
1.2. Wzór Eulera
Szereg Maclaurina
( )
( )
( )
0
0
n
n
n
f
f x
x
n!
�
=
=
�
( )
( )
2
4
6
2
0
1
1
2
4
6
2
n
n
n
x
x
x
x
cosx
...
!
!
!
n !
�
=
= -
+
-
+ =
-
�
( )
(
)
3
5
7
2 1
0
1
3
5
7
2
1
n
n
n
x
x
x
x
sinx x
...
!
!
!
n
!
+
�
=
= -
+ -
+ =
-
+
�
Rozwinięcie funkcji
cos x
Rozwinięcie funkcji
sin x
Rozwinięcie funkcji
e
x
(wzór Eulera)
( )
( )
( )
( )
2
3
4
5
2
4
3
5
1
2
3
4
5
1
2
4
3
5
ix
ix
ix
ix
ix
e
ix
...
!
!
!
!
x
x
x
x
... i x
...
cosx i sinx
!
!
!
!
= + +
+
+
+
+ =
�
�
-
+
-
+
-
+
-
=
+
�
�
�
�
5
1.3. Rozwiązanie równania ruchu
Przewidywane rozwiązanie
( )
rt
q t
e
=
( )
rt
q t
re
=
&
( )
2 rt
q t
r e
=
&&
2
0
rt
rt
mr e
ke
+
=
(
)
2
0
rt
mr
k e
+
=
2
0
mr
k
+ =
12
,
k
r
i
m
=�
( )
( )
1
2
iωt
iωt
q t
e , q t
e
-
=
=
k
ω
m
=
1
2
r iω , r
iω
=
=-
– częstość kołowa drgań własnych (częstość drgań własnych)
6
( )
( )
1
2
iωt
iωt
q t
e
cosωt i sinωt
q t
e
cosωt i sinωt
-
=
=
+
=
=
-
( )
( )
( )
( )
( )
( )
1
1
2
2
1
2
1
2
1
2
ˆq t
q t
q t
cosωt
ˆq t
q t
q t
sinωt
i
=
+
=
�
�
�
�
=
-
=
�
�
�
�
( )
q t
asinωt bcosωt
=
+
Rozwiązania równania
jednorodnego
Kombinacja rozwiązań
Całka ogólna równania
jednorodnego
a
,
b
– stałe całkowania
( )
0
0
0
0
q t
q
asinωt
bcosωt
= =
+
( )
0
0
0
0
q t
v
aωcosωt bωsinωt
= =
-
&
0
b q
=
0
v
a
ω
=
( )
0
0
v
q t
sinωt q cosωt
ω
=
+
7
( )
0
0
v
q t
sinωt q cosωt
ω
=
+
( )
(
)
q t
Acosωt φ
=
+
Dwie postaci rozwiązania
równania ruchu
( )
0
0
v
q t
Acosωtcosφ Asinωtsinφ
sinωt q cosωt
ω
=
-
=
+
0
0
v
Asinφ
ω
Acosφ q
�
=-
�
�
�
= �
v
A
q
ω
v
tgφ
ωq
�
� �
=
+
�
� �
�
� �
�
� =-
�
�
2
2
2
0
0
0
0
A
– amplituda drgań
– kąt fazowy
8
1.4. Wielkości charakteryzujące drgania swobodne nietłumionego
układu o jednym stopniu swobody
A
– amplituda drgań [m]
– kąt fazowy [rad]
– częstość kołowa drgań własnych [rad/s]
– okres drgań [s]
f – częstotliwość drgań [1/s] (
1/s = 1
Hz)
( )
(
)
q t
Acosωt φ
=
+
2π ωT
=
2π
T
ω
=
1
f
T
=
9
0
1
2
3
4
5
6
7
8
9
10
5
4
3
2
1
0
1
2
3
4
5
4.472
4.472
X1
2
X1
3
10
0
X1
1
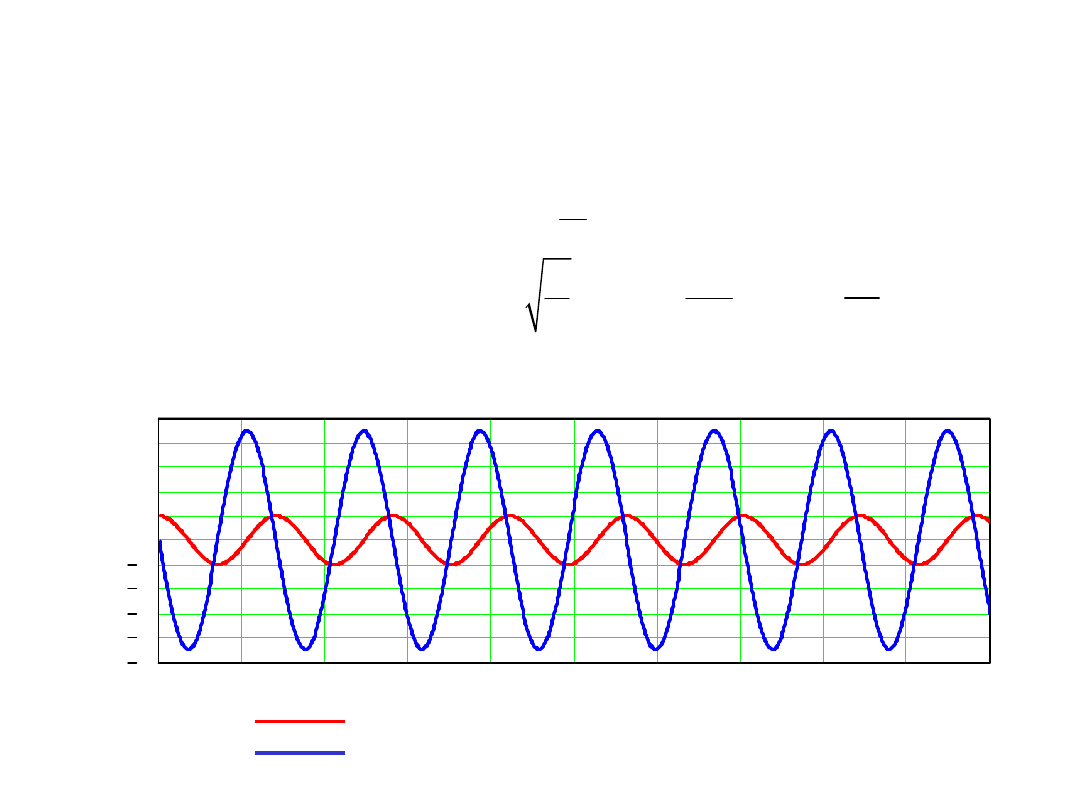
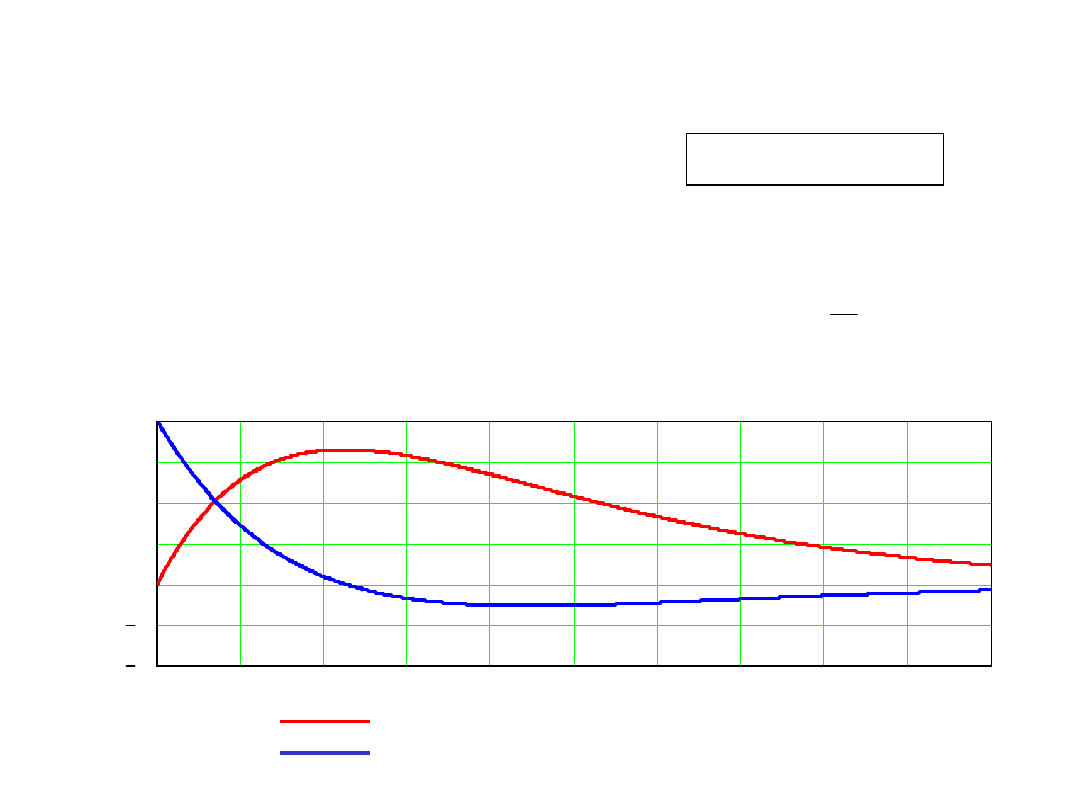
1.5. Przykład drgań swobodnych nietłumionego układu
o jednym stopniu swobody
Masa układu
Sztywność więzów sprężystych
1
m
kg
=
20
N
k
m
=
Częstość i okres drgań własnych
4 472
k
rad
ω
,
m
s
=
=
2
1405
π
T
,
s
ω
=
=
Czas
[s]
P
o
ło
że
n
ie
[m
]
P
rę
d
ko
ść
[m
/s
]
Warunki początkowe
( )
( )
0
1
0
0
q
m, q
=
=
&
Położenie
Prędkość

Część 2
Drgania swobodne tłumione

11
2.1. Rozwiązanie równania ruchu
( )
( )
( )
0
mq t
cq t
kq t
+
+
=
&&
&
Równanie ruchu układu materialnego o jednym stopniu swobody z tłumieniem
wiskotycznym
Przewidywane rozwiązanie
( )
rt
q t
e
=
( )
rt
q t
re
=
&
( )
2 rt
q t
r e
=
&&
2
0
rt
rt
rt
mr e
cre
ke
+
+
=
(
)
2
0
rt
mr
cr k e
+ +
=
2
0
mr
cr k
+ + =
2
2
1
2
2
2
2
2
c
c
k
c
c
k
r
, r
m
m
m
m
m
m
� �
� �
=-
+
-
=-
-
-
� �
� �
� �
� �
( )
1
2
1
2
rt
r t
q t
C e
C e
=
+
Rozwiązanie równania ruchu
12
2.2. Pojęcie tłumienia
krytycznego
2
0
2
kr
c
k
c c
m
m
� �
=
�
-
=
� �
� �
2
kr
c
km
=
2
2
kr
k
c
mω
ω
=
=
Definicja tłumienia
krytycznego
Definicja bezwymiarowego współczynnika tłumienia
kr
c
γ
c
=
( )
( )
( )
( )
mq t
cq t
kq t
P t
+
+
=
&&
&
( )
( )
( )
( )
2
2
P t
q tγωq t
ω q t
m
+
+
=
&&
&
( )
( )
( )
2
2
0
q tγωq t
ω q t
+
+
=
&&
&
Ogólne równanie ruchu układu o jednym stopniu swobody
Równanie ruchu niewymuszonego układu o jednym stopniu
swobody
2
2
1
2
1
1
rγω ω γ
, r
γω ω γ
=-
+
-
=-
-
-
Pierwiastki równania
charakterystycznego
13
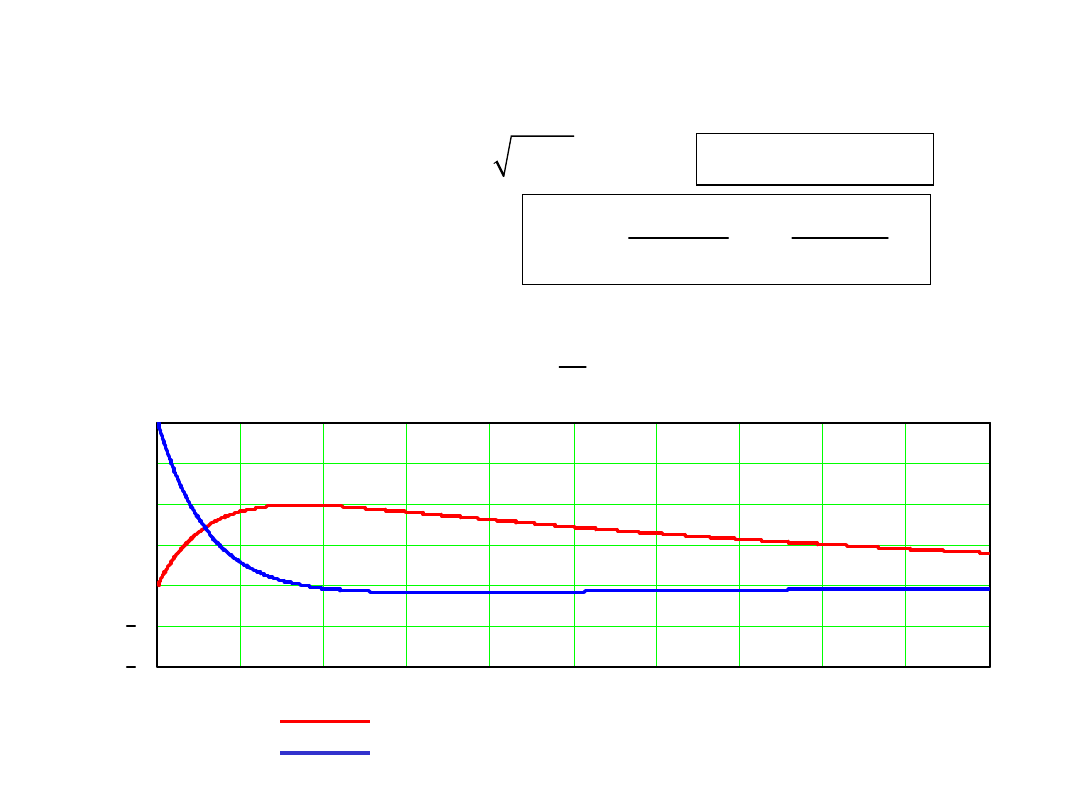
2.3. Ruch układu z krytycznym współczynnikiem
tłumienia
1
2
r rγω
= =-
kr
c c
=
1
γ=
( ) (
)
1
2
γωt
q t
C C t e
-
=
+
0
1
2
3
4
5
6
7
8
9
10
2
1
0
1
2
3
4
4
0.541
X2
2
X2
3
10
0
X2
1
Czas
[s]
P
o
ło
że
n
ie
[m
]
P
rę
d
ko
ść
[m
/s
]
Położenie
Prędkość
Masa układu
Sztywność więzów sprężystych
1
m
kg
=
0 2
N
k
,
m
=
Warunki początkowe
( )
( )
0
0
0
4
q
m, q
=
=
&
Przykład:
14
2.4. Ruch układu z nadkrytycznym współczynnikiem
tłumienia
2
12
1
,
rγω
γ
=-
�
-
kr
c c
>
1
γ>
( )
1
2
1
2
rt
r t
q t
C e
C e
=
+
( )
0
0
q t
q
=
( )
0
0
q t
v
=
&
( )
1
2
0
2 0
0
1 0
2
1
2
1
rt
r t
v
r q
v
rq
q t
e
e
r r
r r
-
-
=-
+
-
-
0
1
2
3
4
5
6
7
8
9
10
2
1
0
1
2
3
4
4
0.191
X2
2
X2
3
10
0
X2
1
Czas
[s]
P
o
ło
że
n
ie
[m
]
P
rę
d
ko
ść
[m
/s
]
Położenie
Prędkość
1
m
kg
=
0 2
N
k
,
m
=
Przykład:
2
kr
c
c
=
15
2.5. Ruch układu z podkrytycznie tłumionego
2
1
1
rγω iω
γ
=-
+
-
kr
c c
<
1
γ<
2
2
1
rγω iω
γ
=-
-
-
( )
(
)
( )
(
)
1
2
d
d
iω t
γωt
γωt
d
d
iω t
γωt
γωt
d
d
q t
e e
e
cosω t i sinω t
q t
e e
e
cosω t i sinω t
-
-
-
-
-
=
=
+
=
=
-
( )
( )
( )
( )
( )
( )
1
1
2
2
1
2
1
2
1
2
γωt
d
γωt
d
ˆq t
q t
q t
e
cosω t
ˆq t
q t
q t
e
sinω t
i
-
-
=
+
=
�
�
�
�
=
-
=
�
�
�
�
( )
(
)
1
2
γωt
d
d
q t
e
A sinω t A cosω t
-
=
+
Rozwiązania równania
jednorodnego
Kombinacja rozwiązań
Całka ogólna równania
jednorodnego
A
1
,
A
2
– stałe całkowania
2
1
d
ω
γ
ω
-
=
16
( )
(
)
1
2
γωt
d
d
q t
e
A sinω t A cosω t
-
=
+
( )
(
)
(
)
1
2
1
2
γωt
γωt
d
d
d
d
d
d
q tγωe
A sinω t A cosω t
e
Aω cosω t A ω sinω t
-
-
=-
+
+
-
&
( )
0
2
0
q
q
A
= =
( )
0
2
1
0
d
q
v
Aγω Aω
= =-
+
&
d
γωq v
A
ω
+
=
0
0
1
2
0
A
q
=
( )
γωt
d
d
d
γωq v
q t
e
sinω t q cosω t
ω
-
�
�
+
=
+
�
�
�
�
0
0
0
Warunki brzegowe
Stałe całkowania
Rozwiązanie
Wyznaczenie stałych
całkowania
17
Alternatywna postać rozwiązania
( )
(
)
γωt
d
q t
Ae
cosω t α
-
=
-
Alternatywna postać rozwiązania
A ,α
- nowe stałe całkowania
(
)
0
0
0
γωt
γωt
d
d
d
d
γωq v
Ae
cosω tcosα sinω tsinα
e
sinω t q cosω t
ω
-
-
-
�
�
+
=
+
�
�
�
�
0
0
d
γωq v
Asinα
ω
-
=
0
Acosα q
=
(
)
d
γωq v
A
q
ω
+
=
+
2
0
0
2
2
0
2
d
γωq v
tgα
qω
+
=
0
0
0
2
2
2
1
d
d
π
π
T
ω
ω
γ
=
=
-
Okres drgań w ruchu tłumionym
Gdy
0 10
γ
,
=
0 995
d
ω
,
ω
=
1005
d
T
,
T
=
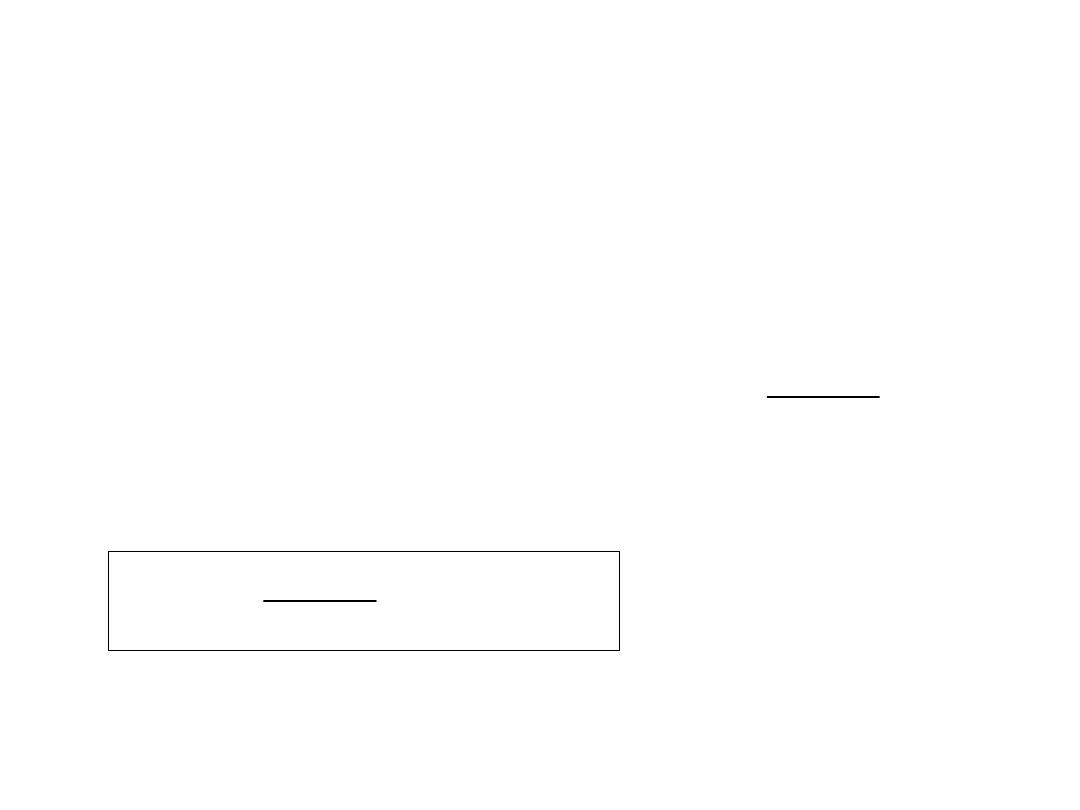
18
0
1
2
3
4
5
6
7
8
9
10
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1
1
x2 t
( )
e
b
t
e
b
t
10
0
t
Czas
[s]
P
o
ło
że
n
ie
[m
]
położenie
funkcja
wykładnicza
1
m
kg
=
20
N
k
m
=
Przykład:
0 5
Ns
c
,
m
=
0 056
γ
,
=
0
1
q
m
=
0
0
m
v
s
=
Ruch oscylacyjny nieokresowy
Ruch okresowy modulowany funkcją
( )
γωt
m
q t
Ae
-
=
( )
γωt
m
q t
Ae
-
=
19
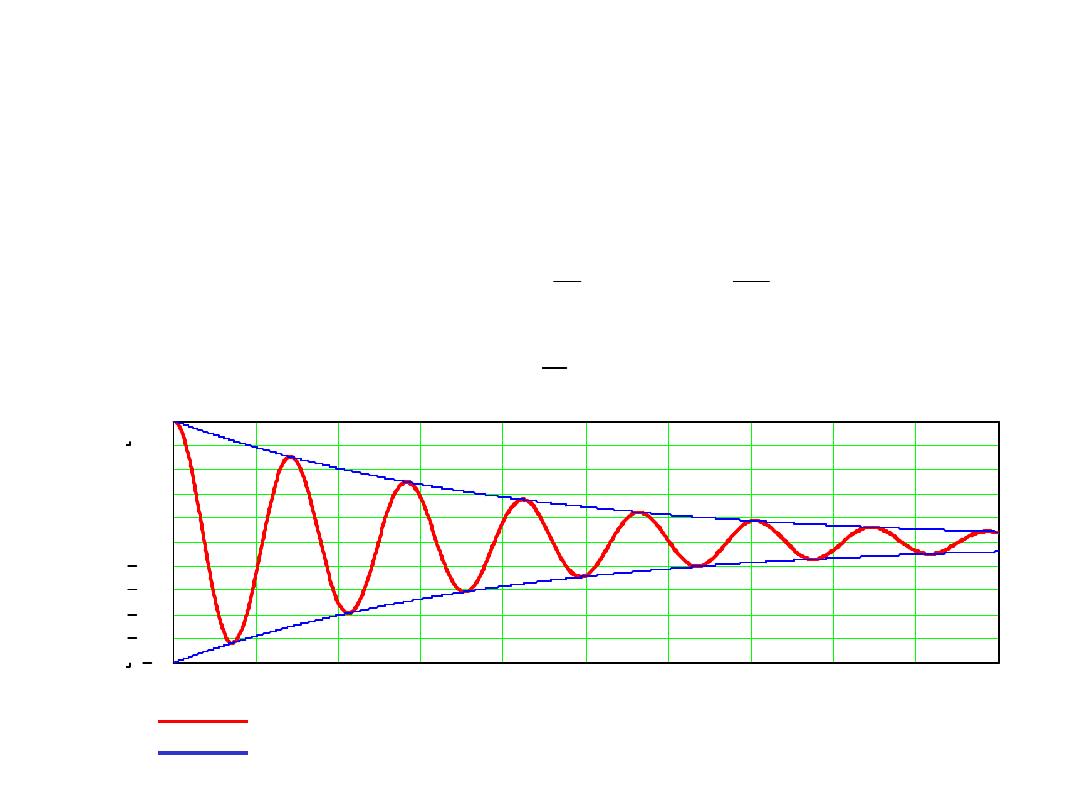
2.6. Logarytmiczny dekrement tłumienia
1
n
n
A
Δ ln
A
+
=
( )
(
)
γωt
d
q t
Ae
cosω t α
-
=
-
( )
n
γωt
n
n
A
q t
Ae
-
=
=
(
)
(
)
1
n
d
γω t T
n
n
d
A
q t T
Ae
-
+
+
=
+
=
1
d
γωT
n
n
A
e
A
+
=
2
2
1
d
πγ
Δ γωT
γ
=
=
-
Logarytmiczny dekrement tłumienia wykorzystuje się do wyznaczania
współczynnika tłumienia na drodze doświadczalnej.
2
2
1
n
m
n m
A
mπγ
Δ
ln
A
γ
+
=
=
-
m
– liczba cykli, po których
mierzy się drugą amplitudę
drgań
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
Wyszukiwarka
Podobne podstrony:
MT st w 14
MT st w 06
MT st w 02a
MT st w 06 [tryb zgodności]
125941 ii rok i st 14 15 zima
MT st w 08 [tryb zgodności]
MT st w 02a 2
MT st w 10
MT st w 13
MT st w 03
MT st w 04 cz1 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 15
więcej podobnych podstron