1
14. AUTOMATYCZNY ROZRUCH GWIAZDA TRÓJKĄT SILNIKA
INDUKCYJNEGO
Wiadomości wstępne
Bezpośrednie włączenie do sieci silnika klatkowego powoduje chwilowy początkowy przepływ prądu
wynoszący od 3 do 7 krotnej wartości prądu znamionowego silnika. Tak duży prąd rozruchowy
ma niekorzystny wpływ nie tylko na sam silnik, ale również na pracę innych odbiorników dołączonych do
sieci i samą sieć zasilającą. Zastosowanie przełączania uzwojeń silnika z gwiazdy w trójkąt umożliwia
znaczne, bo trzykrotne zmniejszenie jego prądu rozruchowego. Wynika stąd, że stosowane przy takim
rozruchu silniki klatkowe powinny mieć w czasie pracy uzwojenia połączone w trójkąt. Przełączając
uzwojenia takiego silnika w gwiazdę można dołączyć go do sieci o napięciu 3 razy większym od napięcia
roboczego odpowiadającego połączeniu w trójkąt. Aby taki rozruch mógł być zastosowany potrzebny jest
silnik, którego napięcie znamionowe wynosi 380V w układzie połączeń w trójkąt. Silniki przystosowane do
takiego rozruchu mają podane na tabliczce napięcie znamionowe
/
∆
−660/380V; na silnikach nowszych
konstrukcji pisze się tylko
∆
−380V. Drugim warunkiem stosowania tego typu rozruchu jest wyprowadzenie
sześciu końcówek faz silnika, tj. początków i końców każdej z faz. Ponadto w czasie rozruchu moment
oporowy maszyny roboczej nie powinien przekraczać 30-35% momentu znamionowego silnika. Ponieważ
prąd i moment silnika maleje przy obniżonym napięciu zgodnie z równaniami:
2
r
r
r
U
U
M
U
U
I
I
⎟
⎠
⎞
⎜
⎝
⎛ ′
=
′
⎟
⎠
⎞
⎜
⎝
⎛ ′
=
′
gdzie:
r
r
M
i
I
′
′
- prąd i moment silnika przy obniżonym napięciu U ′
to dla połączenia w gwiazdę i trójkąt można przedstawić zależności w tabeli 14.1. Z powyższych zależności
wynika, że prąd pobierany z sieci zasilającej przy tym sposobie rozruchu maleje trzykrotnie; maleje również
trzykrotnie moment rozruchowy - co jest wadą tego sposobu rozruchu.
Tabela 14.1.
Skojarzenie uzwojeń
w gwiazdę
Skojarzenie uzwojeń
w trójkąt
Napięcie
fazowe
p
f
U
3
1
U
=
p
f
U
U
=
Moment
M
=
1
/
3
M
∆
Prąd fazowy
I
f
= I
p
I
f
=
3
1
I
f
∆
I
f
=
3
1
I
p
Prąd
przewodowy
I
p
=
1
/
3
I
p
∆
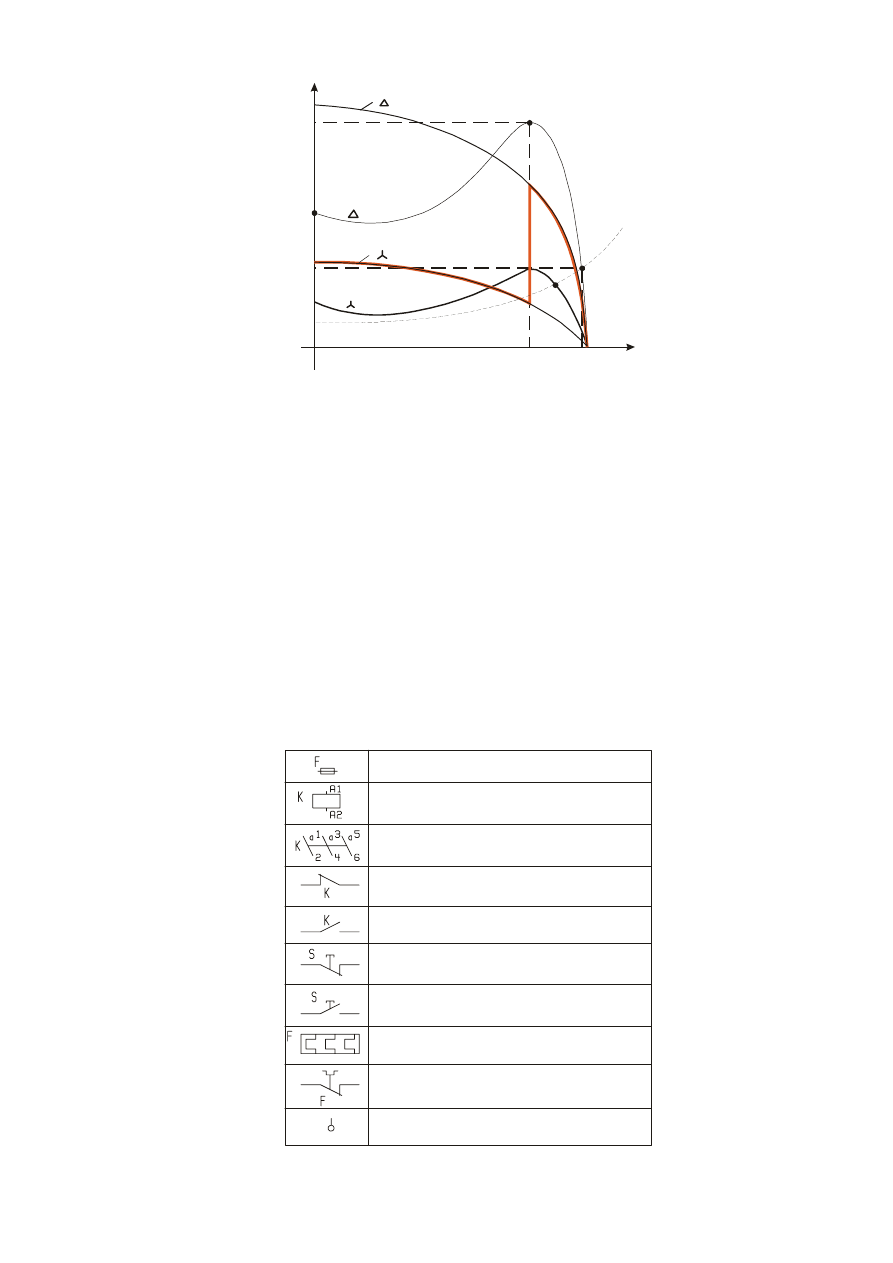
Przebieg prądu płynącego przez silnik indukcyjny oraz momentu obrotowego silnika w funkcji prędkości
obrotowej podczas rozruchu przedstawiono na rysunku 14.1.
gdzie:
k
n
- prędkość występująca przy momencie krytycznym
(
)
N
k
n
9
,
0
8
,
0
n
−
=
N
n
- znamionowa prędkość obrotowa
0
n
-prędkość obrotowa biegu jałowego
s
n
- prędkość synchroniczna
2
M
r
M
k
I,M
M
M
n
n
n
s
n
n
n
k
0
M
I
Mom ent
oporow
y
A
I
Rys. 14.1. Charakterystyki momentów napędowego i oporowego oraz prądów przy rozruchu gwiazda – trójkąt
Grubą linią zaznaczony jest przebieg prądu podczas przełączania.
Zaznaczony moment przełączenia
przedstawia minimalny czas, dla którego nastąpi ograniczenie prądu rozruchowego. W praktyce przełączenie
odbywa się po ustaleniu prędkości obrotowej dla połączenia w gwiazdę, tzn. przy zrównaniu momentu
napędowego i oporowego (pt. A charakterystyki, rys. 14.1).
Spośród wielu różnych sposobów rozruchu silnika klatkowego za pomącą przełączania uzwojeń
z gwiazdy w trójkąt, dwa są najczęściej stosowane. Jeden – to rozruch w funkcji czasu, drugi – w funkcji
prądu. Można dokonywać również rozruchu w funkcji prędkości obrotowej. Rozruch w funkcji czasu polega
na tym, że przełączenie uzwojeń z połączenia w gwiazdę w trójkąt dokonywane jest za pomocą przekaźnika
czasowego, po określonym czasie od chwili załączenia silnika do sieci - rozruch w funkcji prądu polega na
przełączeniu za pomocą przekaźnika prądowego, gdy prąd rozruchu zmniejszy się poniżej określonej
wartości. Każdy z tych dwu sposobów ma wady i zalety. Przy rozruchu w funkcji prądu silnik jest
dostatecznie zabezpieczony przed nadmiernym wzrostem prądu, lecz może wystąpić niekorzystne zjawisko,
tzw. „utknięcia” silnika (np. przy niespodziewanym obciążeniu silnika przed rozruchem znacznym
momentem oporowym) w układzie skojarzenia uzwojeń w gwiazdę. Przy stosowaniu rozruchu w funkcji
czasu wymagane jest dokładne dobranie zabezpieczeń silnika, oraz sieci zasilającej przed ewentualnymi
przeciążeniami.
Tabela 14.1.
Symbole graficzne wybranych aparatów elektrycznych
Zestyk pomocniczy rozwierny stycznika,
przekaźnika
Bezpiecznik
Cewka stycznika, przekaźnika
Zestyki główne stycznika
Zestyk pomocniczy zwierny stycznika,
przekaźnika
Zestyk rozwierny łącznika z napędem
ręcznym i samoczynnym powrotem
Zestyk zwierny łącznika z napędem
ręcznym i samoczynnym powrotem
Zestyk rozwierny zabezpieczenia
termicznego
Zabezpieczenie termiczne silnika
Zacisk
x
1
1
1
1
1
1
2
2
1
W tabeli 14.1. przedstawiono symbole graficzne przekaźników i łączników zastosowanych w układach
rozruchu silników indukcyjnych. Na rysunkach 14.2 i 14.3 przedstawiono układ do rozruchu gwiazda-trójkąt
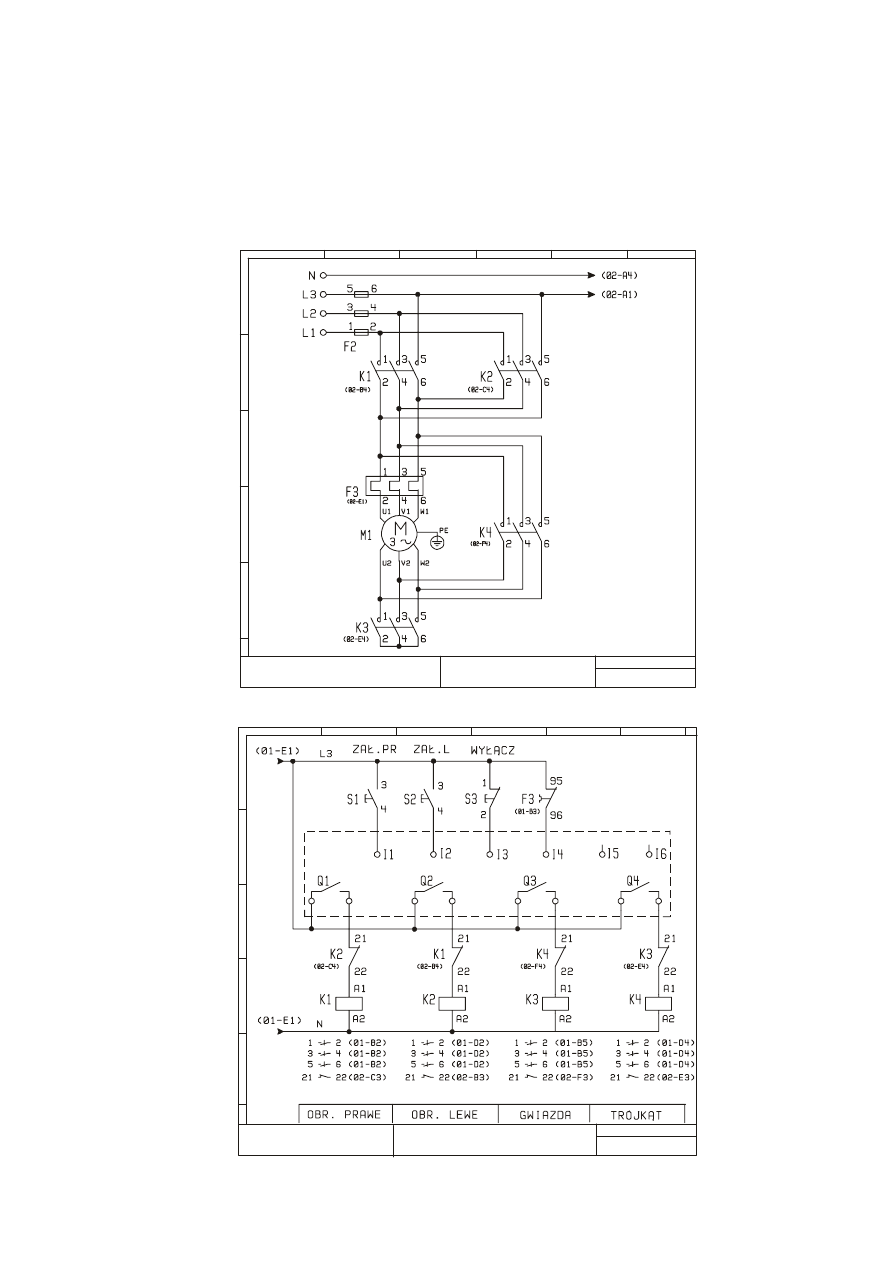
3
w funkcji czasu w którym wykorzystano moduł programowalny. Schemat został przedstawiony w typowym
standardzie numeracji elementów i został rozdzielony na obwody mocy i sterowania. Poszczególne elementy
danego aparatu elektrycznego posiadają takie samo oznaczenie. Przykładowo cewka, zestyki główne
i zestyki pomocnicze jednego stycznika mają oznaczenie K1. Poszczególne elementy aparatu posiadają
dodatkowo skojarzenie typu „master–slave”. Oznacza to w praktyce, że cewka posiada adres zestyków,
a każdy z zestyków adres cewki. Taki rodzaj dokumentacji elektrycznej ułatwia zrozumienie logiki układu
oraz wyszukiwanie jego poszczególnych elementów.
Na schematach elektrycznych symbole odwzorowują położenia zestyków aparatów w stanie
niewzbudzonym. Wzbudzenie (zadziałanie) aparatu powoduje zmianę położenia jego zestyków.
1
2
3
4
5
A
B
C
D
E
F
ILOŚĆ RYSUNKÓW
W PROJEKCIE
NUMER
RYSUNKU
Rozruch silnika indukcyjnego
OBWODY MOCY
2
01
Rys. 14.2. Schemat obwodów mocy do rozruchu gwiazda – trójkąt silnika indukcyjnego
ILOŚĆ RYSUNKÓW
W PROJEKCIE
2
NUMER
RYSUNKU
02
Rozruch silnika indukcyjnego
OBWODY STEROWANIA
1
2
3
4
5
A
B
C
D
E
F
Rys. 14.3. Schemat obwodów sterowania do rozruchu gwiazda – trójkąt silnika indukcyjnego
4
Opis działania układu sterowania rozruchem gwiazda – trójkąt silnika indukcyjnego
Po wciśnięciu łącznika S1 następuje zadziałanie przekaźników Q1 i Q3 modułu programowalnego, co
powoduje podanie napięcia na cewki styczników K1 oraz K3. Rozwierają się zestyki rozwierne styczników
K1 i K3 a następnie zwierają zestyki mocy tych styczników Powoduje to podanie napięcia do układu
i skojarzenie uzwojeń silnika w gwiazdę. Zestyk rozwierny stycznika K1 stanowi blokadę przed
jednoczesnym załączeniem styczników K1 i K2 (uniemożliwia równoczesne załączenie prawego i lewego
kierunku wirowania wirnika). Podobnie zestyki rozwierne styczników K3 i K4 zostały włączone w celu
uniemożliwienia jednoczesnego skojarzenia uzwojeń stojana w gwiazdę i w trójkąt.
B08
B03
x
x
x
x
x
I1
I1
Q1
Q2
Prawy
kierunek
wirowania
Skojarzenie
uzwojeń
w gwiazdę
B01
B09
B11
T=4s
T=0,1s
T=6s
T=6s
B12
I2
I2
I3
I4
Załącz
lewy
kierunek
wirowania
Wyłącz
Zabezp.
Termiczne
B06
B10
B02
B07
B05
B04
Q1
Q2
Q3
Q4
Lewy
kierunek
wirowania
Skojarzenie
uzwojeń
w trójkąt
Załącz
prawy
kierunek
wirowania
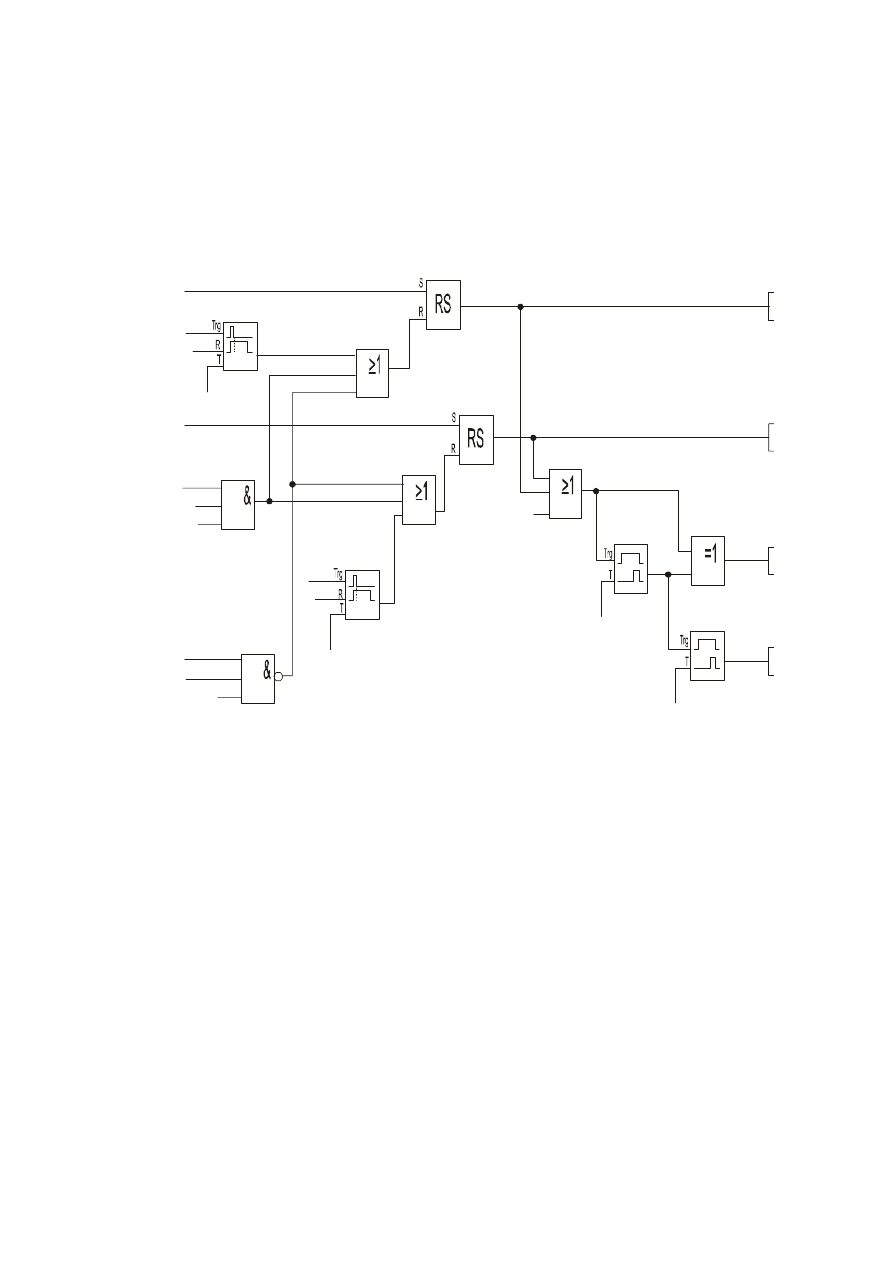
Rys. 14.4. Program do rozruchu gwiazda – trójkąt silnika indukcyjnego
Po określonym czasie (dobranym odpowiednio do warunków rozruchu) następuje rozłączenie
przekaźnika Q3 modułu, co w efekcie powoduje podanie napięcia na cewkę stycznika K3, rozwarcie jego
zestyków mocy i zwarcie zestyku rozwiernego. Po zwłoce czasowej (ok. 0,1 s) następuje załączenie
przekaźnika Q4 modułu, zadziałanie cewki przekaźnika K4, rozwarcie jego zestyku rozwiernego i zwarcie
zestyków mocy. Układ zostaje przełączony do pracy w trójkącie. Zwłoka czasowa pomiędzy rozłączeniem
gwiazdy a załączeniem trójkąta jest konieczna dla uniknięcia zwarć przy przełączaniu styczników. Podobnie
zachowuje się układ po wciśnięciu przycisku S2 z tym, że zostaje załączony stycznik K2 (lewe obroty).
Wciśnięcie przycisku S3 (lub zadziałanie przekaźnika termicznego) powoduje rozłączenie układu. Moduł
programowalny zastępuje w tym układzie działanie przekaźnika czasowego, ale daje większe możliwości
w układzie automatyki. Dla przykładu program przedstawiony na rys. 14.4. został tak skonfigurowany, aby
zmiana kierunku obrotów była możliwa dopiero po wyłączeniu silnika. Niewielkie zmiany w programie, bez
jakichkolwiek zmian w układzie elektrycznym umożliwiają zmianę kierunku wirowania silnika bez jego
wyłączania (zachowany zostaje tryb rozruchu gwiazda – trójkąt). W oparciu o ten sam układ automatyki
może być realizowane (po zmianie programu) hamowanie przeciwprądem silnika indukcyjnego.
5
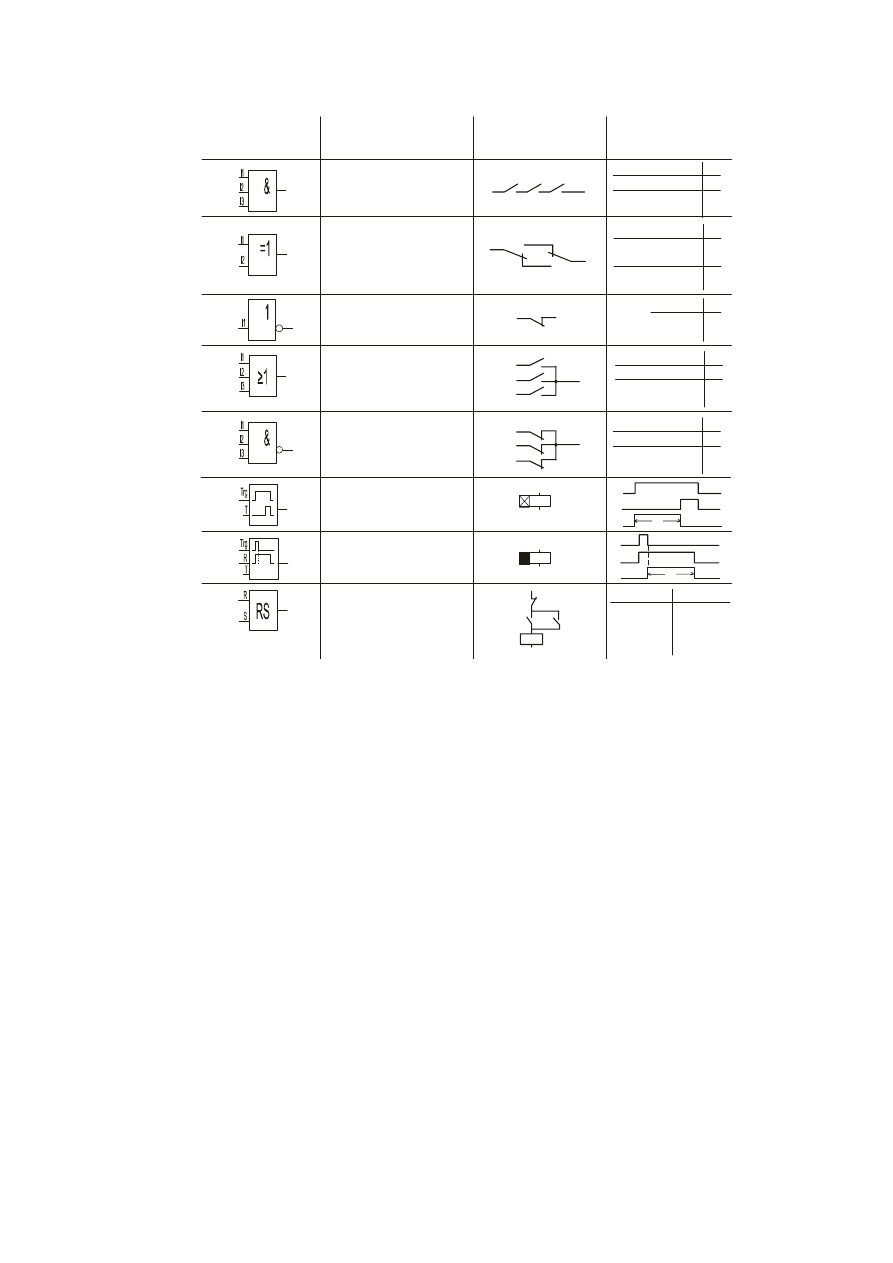
Tabela 14.2.
Opis bloków modułu logicznego
Reprezentacja
graficzna symbolu
Nazwa
Tablica logiczna
stanów
Reprezentacja
schematyczna
I1
Q
1
1
0
0
Dla innych
stanów wejść
Dla innych
stanów wejść
Dla innych
stanów wejść
I1
I1
I1
I2
I2
I2
I3
I3
I3
Q
Q
Q
1
1
1
1
1
1
1
1
1
0
0
0
0
00
0
S
R
Q
1
1
1
1 Ustaw
1
0
0
0
0
0 Kasuj
Bez zmian
0
AND
(iloczyn logiczny)
XOR
(różnica symetryczna)
NOT
(negacja)
OR
(suma logiczna)
NAND
(negacja iloczynu)
On-delay
(opóźnione załączenie)
Off-delay
(opóźnione wyłączenie)
Latching relay
(przekaźnik zatrzaskowye)
K1
K1
R
S
Trg
Trg
Q
Q
T
T
Dla innych
stanów wejść
I1
I2
Q
1
1
1
1
0
0
0
Zastosowany moduł programowalny to uniwersalny moduł logiczny posiadający 6 wejść cyfrowych
oraz 4 wyjścia cyfrowe. Moduł czyta stany wejść I1 do I6 a następnie uaktualnia wybrane stany wyjść
zgodnie z wprowadzonym programem. Załącza lub wyłącza zestyki Q1 do Q4. Wejścia i wyjścia modułu
logicznego mogą być w stanie „0” lub „1”. „0” znaczy, że na wejściu brak jest napięcia; „1” oznacza, że na
wejście napięcie zostało podane. „0” na wyjściu oznacza, że zestyk jest w stanie rozwartym, „1”, że zestyk
jest w stanie zwartym. Poszczególne bloki logiczne posiadają na wyjściu stan „0” lub „1” w zależności od
stanu ich wejść. Opis stanów bloków logicznych i ich interpretacja graficzna w module programowalnym
został przedstawiony w tabeli 14.2.
Programowanie modułu logicznego
Przez programowanie rozumiemy odwzorowanie logiki połączeń układu sterowania w pamięci modułu.
Programowanie polega na wyborze bloków logicznych, lub funkcji specjalnych i przyporządkowaniu ich
w chemacie drabinkowym. Wyboru dokonujemy z następujących podkatalogów:
• Funkcje „co” – I
1
; I
2
; I
3
; I
4
; I
5
; I
6
; Q
1
; Q
2
; Q
3
; Q
4
; lo(stan niski-0); hi (stan wysoki-1)
• Funkcje główne „GF” AND; NAND; OR; NOT, XOR
• Funkcje specjalne „SF” opóźnione załączenie; opóźnione wyłączenie; przekaźnik zatrzaskowy
• Bloki „BN” dołączenie wejścia do istniejącego bloku
Podczas wprowadzania programu obowiązują następujące reguły:
Strukturę logiczną programu zaleca się wprowadzać od wyjścia Q
n
do wejścia I
n
. Za pomocą przycisków
„< >” przesuwać kursor po blokach programowych. Przycisnąć klawisz „OK” dla wyboru połączenia lub
bloku. Przycisnąć klawisz „ESC” dla rezygnacji z wykonanej operacji. Symbol „x” oznacza, że wejście nie
jest używane. Jednoczesne wciśnięcie przycisków „< > OK” umożliwia edycję programu. Jednoczesne
wciśnięcie przycisków „OK ESC” umożliwia zmianę parametrów poszczególnych bloków. Po
wprowadzeniu programu należy go zatwierdzić przez naciśnięcie klawisza „ESC”. Jeżeli program nie został
wprowadzony w całości elementy do uzupełnienia ukażą się ze znakiem „?”

6
6.1. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z układem automatycznego rozruchu silnika klatkowego
z przełączaniem jego uzwojeń z gwiazdy w trójkąt, zaobserwowanie zjawisk występujących przy
przełączaniu układu, zapoznanie się z zasadą pracy i programowania modułu logicznego, oraz zapoznanie się
z typowym rodzajem dokumentacji elektrycznej.
6.2. Przebieg ćwiczenia
6.2.1. Zapoznanie się z aparaturą
Przed rozpoczęciem ćwiczenia należy zapoznać się z charakterystycznymi danymi silnika i aparatury
przeznaczonej do wykonania ćwiczenia (rodzaje aparatów, napięcia, prądy znamionowe).
6.2.2. Wprowadzenie programu do modułu logicznego.
Zaprogramować moduł, wg programu na rysunku 14.5. zwracając szczególną uwagę na wpisanie
odpowiednich czasów w blokach opóźnionego załączenia i wyłączenia.
6.2.3. Zmontowanie i uruchomienie układu
Zmontować układ w taki sposób, aby najpierw dokonać sprawdzenia poprawności działania samego
obwodu sterowania. Należy przeprowadzić kilkakrotne uruchomienie układu zmieniając każdorazowo
w bloku B11 programu ( rys. 14.5.) chwilę przełączenia silnika z gwiazdy w trójkąt. Po stwierdzeniu
prawidłowej kolejności zamykania i otwierania się poszczególnych zestyków można uruchomić również
obwody mocy.
6.2.4. Rejestrowanie przebiegów prądów i napięć silnika
Dla trzech rożnych czasów przełączania zarejestrować przebiegi prądu przewodowego pobieranego przez
silnik oraz napięć używając oscyloskopu z pamięcią. Przebiegi należy zarejestrować dla dwóch różnych
momentów obciążenia M
2
=0,2M
N
i M
2
=0,4M
N
, oraz dla biegu jałowego Należy porównać przebiegi
oscyloskopowe ze wskazaniami mierników analogowych, oraz zwrócić uwagę na zjawiska towarzyszące
przełączaniu styczników.
6.3. Sprawozdanie.
Sprawozdanie powinno zawierać:
• dane znamionowe układu napędowego,
• charakterystyki prądów i napięć przy połączeniu w gwiazdę i w trójkąt,
• analizę przebiegów oscyloskopowych,
• analizę i dobór czasów rozruchu silnika dokonaną na podstawie przebiegów oscyloskopowych,
• wnioski i spostrzeżenia.
Document Outline
Wyszukiwarka
Podobne podstrony:
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego, CWICZ9, Ćwiczenie 9
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego, GWIAZDA-TRÓJKĄT, SPRAWOZDANIE
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego, POLITECHNIKA RADOMSKA
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego2, POLITECHNIKA RADOMSKA
rozruch gwiazda trójkąt, Studia, ELEKTROTECHNIKA, Napęd Elektryczny
rozruch gwiazda trójkąt
Rozruch silników przełącznikiem gwiazda trójkąt
ROZRUCH SILNIKA ASYNCHRONICZNEGO Z ZASTOSOWANIEM PRZEŁĄCZENIA GWIAZDA TRÓJKĄT REALIZOWANEGO PRZEZ ST
Zadanie praktyczne - gwiazda trójkat, egzamin zawodowy technik elektryk
Transfiguracja gwiazda trojkat
Przekaźnik czasowy gwiazda trójkąt, ● EDUKACJA, ♦ Elektrotechnika
Przełącznik gwiazda trójkąt zasady nastaw
Rozwiązanie - przełącznik gwiazda trójkąt, egzamin zawodowy technik elektryk
przelacznik gwiazda - trojkat, Studia, ELEKTROTECHNIKA, Napęd Elektryczny
Zamiana gwiazda trojkat
automatyczny rozruch silnika synchronicznego
więcej podobnych podstron