
...każdy ptak lubi słuchać
swojego śpiewu...
4. NARZĘDZIA I SYSTEMY DO POMIARU DRGAŃ
Współczesne maszyny i urządzenia to złożone układy dynamiczne zarówno pod
względem funkcjonalnym, jak i konstrukcyjnym oraz przestrzennym. Proces ich wytwarzania
i eksploatacji pochłania ogromne ilości pracy, surowców i energii. Szybki wzrost wymagań w
stosunku do technicznych parametrów maszyn i urządzeń, przy równoczesnym dążeniu do
zmniejszenia kosztów wytwarzania i eksploatacji, spowodował zasadnicze przeobrażenia w
metodach projektowania, kontroli produkcji i eksploatacji. Liczne przypadkowe uszkodzenia,
niespodziewane awarie oraz zagadnienia związane z uszkodzeniami spowodowanymi
procesami życiowymi i starzeniowymi uzasadniają potrzebę prowadzenia badań drganiowych,
stanowiących podstawowe źródło informacji o zmieniającym się stanie.
4.1. POMIARY I ANALIZA DRGAŃ
Zasady pomiarów
Pomiarem nazywa się proces poznawczy, polegający na porównaniu drogą
doświadczenia fizycznego danej wielkości z pewną jej wartością przyjętą za jednostkę
odniesienia. Tę definicję można rozszerzyć, uwzględniając, że niektóre automatyczne
przyrządy pomiarowe spełniają także zadania wykonawcze.
Pomiarem nazywa się więc proces odbioru i przekształcenia informacji o wielkości
mierzonej w celu otrzymania, przez porównanie z jednostką pomiarową, ilościowego wyniku
w postaci przez jej najbardziej wygodnej do odbioru przez organy czucia człowieka,
przekazania w przestrzeni lub w czasie (rejestracji), matematycznego opracowania lub
wykorzystania do sterowania.
Przeprowadzenie takich pomiarów potrzebne jest do :
- wyznaczenia przebiegów drgań i ich parametrów w czasie celem okreś1enia rodzaju drgań,
ich wielkości charakterystycznych i przeprowadzenia szczegółowej analizy;
- wykrywania źródeł drgań, tzn. ustalania przyczyny powstawania drgań i miejsca ich
występowania;
- ustalania cech charakterystycznych układów mechanicznych ( np. okreś1anie zmienności
obciążeń w czasie podczas drgań i ich zależności od parametrów obiektu, jego kształtu,
wymiarów, własności materiałów itp.);
- izolowania i zmniejszania drgań szkodliwych d1a niezawodnej pracy urządzeń i
obsługujących ludzi;
- określenia szkodliwości występujących drgań d1a obsługi urządzeń mechanicznych i
przeprowadzenia pewnych zabiegów profilaktycznych.
Często bardzo istotne jest wyznaczenie przebiegów drgań własnych i wymuszonych
układów mechanicznych. Tylko dla prostych układów można te przebiegi określić
analitycznie. Dla bardziej złożonych układów przebiegi te są wynikiem superpozycji drgań
własnych i trzeba je wyznaczyć eksperymentalnie na podstawie pomiarów w różnych
punktach układu. Przebiegi drgań własnych zależą od warunków początkowych i parametrów
mechanicznych danego układu. Przebiegi drgań wymuszonych są uzależnione od zmian
wymuszenia w czasie. Na podstawie otrzymanych przebiegów drgań można określić ich
rodzaj (okresowe, przypadkowe, nie ustalone itp.) i przeprowadzić analizę.

Celem analizy jest otrzymanie informacji o parametrach drgań danego układu.
Ważnym zagadnieniem jest wyznaczenie węzłów drgań (punktów, linii lub powierzchni,
które nie biorą udziału w drganiach) i punktów, których amplitudy drgań dla danej
częstotliwości są największe. Zbiór amplitud drgań poszczególnych punktów układu
przedstawia kształt (przebieg) drgań. Zagadnienia te są przedmiotem analizy geometrycznej.
Analiza czasowa polega na określeniu, w jaki sposób zmieniają się w czasie
poszczególne wielkości (przemieszczenie linearne, prędkość, przyśpieszenie, odkształcenie
itp.). Jeżeli zmiany są okresowe, to wyznacza się także ich częstotliwość. Jeżeli zmiany mają
charakter przypadkowy, to do analizy stosuje się metody statystyczne.
Interesujące wnioski można wyciągnąć także na podstawie analizy częstotliwościowej,
tzn. określeniu zmian charakterystycznych wielkości i parametrów w funkcji częstotliwości.
Źródła drgań mogą powstawać z przyczyn konstrukcyjnych (np. mechanizmy korbowe,
krzywkowe i inne wykonujące ruchy, napędy maszyn wibracyjnych), technologicznych
(niedokładności wykonania i montażu maszyny, np. niewyważenie mas wirujących,
owalizacja elementów łożysk i części obrotowych, niepożądane luzy i inne wady) lub
eksploatacyjnych (w wyniku zużycia się elementów i zniekształceń powierzchni w czasie
ruchu).
Przeprowadzając pomiary drgań poszczególnych elementów badanego obiektu można
znaleźć podzespół, który jest źródłem szkodliwych drgań. Przez jego wymianę często można
zmniejszyć drgania całego obiektu. Stosunkowo łatwe jest wykrywanie drgań będących
wynikiem wymuszenia kinematycznego, tzn. wywołanych wskutek ruchu danego elementu
(np. drgania wskutek ruchu samochodu po nierównej drodze), lub wymuszenia
dynamicznego, tzn. wskutek działania na dany element sił zewnętrznych lub sił będących
wynikiem oddziaływania innych podzespołów. Wartość siły może zmieniać się (okresowo lub
nie okresowo) lub być stała, a zmieniać się w czasie może tylko jej kierunek lub punkt
przyłożenia (np. siły odśrodkowe powstałe w wyniku ruchu obrotowego niewyważonej
masy). Trudniejsze jest wykrywanie drgań samowzbudnych, których przyczynami są
przeważnie zmienne opory tarcia, siły hydro- i aerodynamiczne lub występowanie sprzężeń
zwrotnych i drgań parametrycznych, których przyczyną często jest okresowa zmienność
sztywności elementów.
Wyznaczanie zmienności obciążeń pod wpływem drgań pozwala określić występujące
naprężenia i odkształcenia będące wynikiem sił zewnętrznych i sił bezwładności. Mierząc w
miejscach działania obciążeń, w miejscach połączeń itp. występujące siły i momenty można
otrzymać przebieg obciążeń dynamicznych poszczególnych elementów obiektu [14,47,58,81].
Za pomocą pomiarów drgań można badać wpływ wymiarów i kształtów elementów (a
tym samym masy, sztywności itp.), sposobów mocowania i materiałów na parametry drgań.
Występujące drgania obiektów, z wyjątkiem układów techniki drgań, są szkodliwe. Zakłócają
one prawidłową pracę urządzeń, powodując ich szybkie zużywanie oraz straty energetyczne.
Jeżeli występują drgania, wówczas dąży się do ustalenia przyczyny i zlokalizowania ich, a
następnie zmniejszenia. Jeżeli nie da się zmniejszyć drgań, wówczas stosuje się elementy
izolacyjne, które powodują ich tłumienie.
Pomiary drgań polegają na mierzeniu pewnych wielkości fizycznych,
charakteryzujących drgania obiektu. Do takich wielkości zalicza się przemieszczenie,
prędkość i przyspieszenie. Przemieszczenie punktu określa jednoznacznie wektor
przemieszczenia s. Przy pomiarach wektora s określamy jego współrzędne s
x
, s
y
lub s
z
.
Drgania obiektu można określić wektorem chwilowych wartości prędkości v. Dla
wyznaczenia wektora v należy pomierzyć jego składowe: v
x
, v
y
, v
z.
Pomiary prędkości są
celowe w wielu przypadkach. Należy pamiętać, że amplituda prędkości cząstki drgającej
harmonicznie równa jest amplitudzie przemieszczenia pomnożonego przez częstotliwość
kątową
.

Ruch drgający można określić także wektorem chwilowego przyspieszenia a. Wektor
ten można wyznaczyć przez pomiar jego współrzędnych: a
x
, a
y
, a
z
. Przyspieszenie jest
proporcjonalne do działającej siły, w związku z tym dla jednoznacznego scharakteryzowania
drgań można mierzyć przyśpieszenie wyznaczające położenie danego punktu i przyspieszenie
określające oddziaływującą na obiekt siłę. Amplituda przyśpieszenia każdej składowej widma
równa się amplitudzie przemieszczenia pomnożonej przez częstotliwość kątową do kwadratu.
Im wyższa jest harmoniczna przebiegu drgań, tym bardziej jest ona odzwierciedlana w
widmie przyspieszenia. Jak wiadomo, szeregi Fouriera dla pochodnych rozkładanej funkcji są
tym wolniej zbieżne, im jest wyższy rząd pochodnej. Ponieważ amplitudy przyśpieszeń
wyższych harmonicznych są duże, więc do pomiarów należy używać aparaturę posiadającą
szeroki zakres częstotliwości pracy.
Przy pomiarach przemieszczeń wymagania dotyczące zakresu częstotliwości są
mniejsze, ponieważ amplitudy wyższych harmonicznych są pomijalne. Należy zaznaczyć, że
w niektórych przypadkach przebiegi przemieszczeń mogą być prawie sinusoidalne, prędkości
odkształcone, a przyśpieszenia mogą mieć charakter przypadkowych procesów.
Dla każdej z trzech wyżej wymienionych wielkości można mierzyć jej wartości
chwilowe, średnie lub szczytowe. Najpełniejszą informację daje zapis wartości chwilowych w
funkcji czasu. Pomiary wartości średnich przeprowadza się wtedy, gdy chodzi nam o ogólne,
uśrednione informacje o danych drganiach. W niektórych układach są wprowadzone
ograniczenia odnośnie do maksymalnych chwilowych wartości drgań. Dla ich wyznaczenia
wystarczy mierzyć szczytowe wartości drgań.
Często zależy nam na określeniu częstotliwości występujących drgań. Przy drganiach
harmonicznych częstotliwość można wyznaczyć bardzo łatwo, np. z widma chwilowych
wartości przemieszczeń. Można także zmierzyć ją bezpośrednio miernikiem częstotliwości.
Dla drgań okresowych, ale nie harmonicznych, wymagane jest często określenie
częstotliwości podstawowej (drgania harmonicznego o najniższej częstotliwości).
Bezpośrednie wyznaczenie jej z widma jest przeważnie niemożliwe i należy w tym celu
zastosować specjalną aparaturę (filtry przestrajane lub przełączane) albo przeprowadzić
analizę przebiegu analitycznie (szereg Fouriera). Dla pełnego obrazu występujących
częstotliwości należy przeprowadzić szczegółową analizę i wyznaczyć dyskretne widmo
drgań. Jeżeli występują drgania nieokresowe, widmo drgań jest ciągłe. Wyznaczenie tego
widma wymaga skomplikowanej aparatury pomiarowej. Przy drganiach przypadkowych
wymagany jest pomiar rozkładów prawdopodobieństw, który najpełniej charakteryzuje
zachodzący proces. Ze względu na to, że pomiar ten jest bardzo skomplikowany, często
ogranicza się do pomiaru funkcji korelacyjnej drgań. Funkcja ta pozwala wyznaczyć
parametry pierwszego i drugiego rzędu drgań przypadkowych. Na podstawie przekształcenia
Fouriera z funkcji korelacyjnej można wyznaczyć gęstość widmową mocy procesu. Za
pomocą odpowiedniej aparatury można bezpośrednio wyznaczyć widmo amplitudowe.
Pomiar widma fazowego jest rzadko wymagany.
Przy drganiach wywołanych impulsami często wymaga się określenia nachylenia
czoła i czasu trwania działających impulsów. Jeżeli impulsy występują okresowo, to określa
się ich częstotliwość.
Układ pomiarowy służy do przetworzenia ruchu drgającego badanego obiektu na
wskazania miernika lub na postać dogodną do rejestracji. Na obiekcie, którego drgania mają
być mierzone, mocuje się czujniki. Są one przetwornikami wielkości wejściowej (drgań) na
sygnał wyjściowy informujący o mierzonej wielkości. Przetworniki przekształcają drgania
mechaniczne na inną postać drgań mechanicznych lub na drgania elektryczne.
Jeżeli przewody łączące czujniki z pozostałą aparaturą są długie, wówczas dla
zapewnienia lepszych warunków pomiaru stosuje się wtórniki katodowe. Zadaniem ich jest
dopasowanie linii do czujnika. Sygnał wyjściowy z wtórnika katodowego doprowadza się do
pozostałej aparatury pomiarowej liniami połączeniowymi. Urządzenie dodatkowe może
zawierać różne zespoły w zależności od wybranej metody pomiarowej, stosowanych
czujników, mierzonych wielkości i parametrów, własności drgań oraz wymaganej postaci
sygnału wyjściowego. Mogą tutaj wchodzić mostki, różne rodzaje wzmacniaczy, układy
całkujące lub różniczkujące itp. w zależności od tego, czy przewiduje się bezpośredni odczyt,
czy przebieg ma być rejestrowany, stosuje się mierniki wskazówkowe lub rejestratory. Jako
rejestratorów używa się wielokanałowe oscylografy pętlicowe, wielostrumieniowe
oscylografy z kamerami fotograficznymi lub magnetofony pomiarowe. w niektórych
przypadkach zamiast przyrządów wskazówkowych lub rejestratorów używa się analizatorów,
które przeprowadzają od razu analizę drgań i podają gotowe wyniki. Gdy są przeprowadzane
pomiary układów, w pobliżu których ze względu na bezpieczeństwo nie może znajdować się
człowiek, wówczas stosuje się zdalne sterowanie [3,6,14,24,25,27,34].
4.2. UKŁADY POMIAROWE DRGAŃ MECHANICZNYCH
Układ pomiarowy służy do przetworzenia ruchu drgającego badanego obiektu na
wskazania miernika lub na postać dogodną do rejestracji. Na obiekcie, którego drgania mają
być mierzone, mocuje się czujniki. Są one przetwornikami wielkości wejściowej (drgań) na
sygnał wyjściowy informujący o mierzonej wielkości. Przetworniki przekształcają drgania
mechaniczne na inną postać drgań mechanicznych lub na drgania elektryczne. Podstawową
strukturę układu pomiarowego można otrzymać przez odpowiednie połączenie kilku
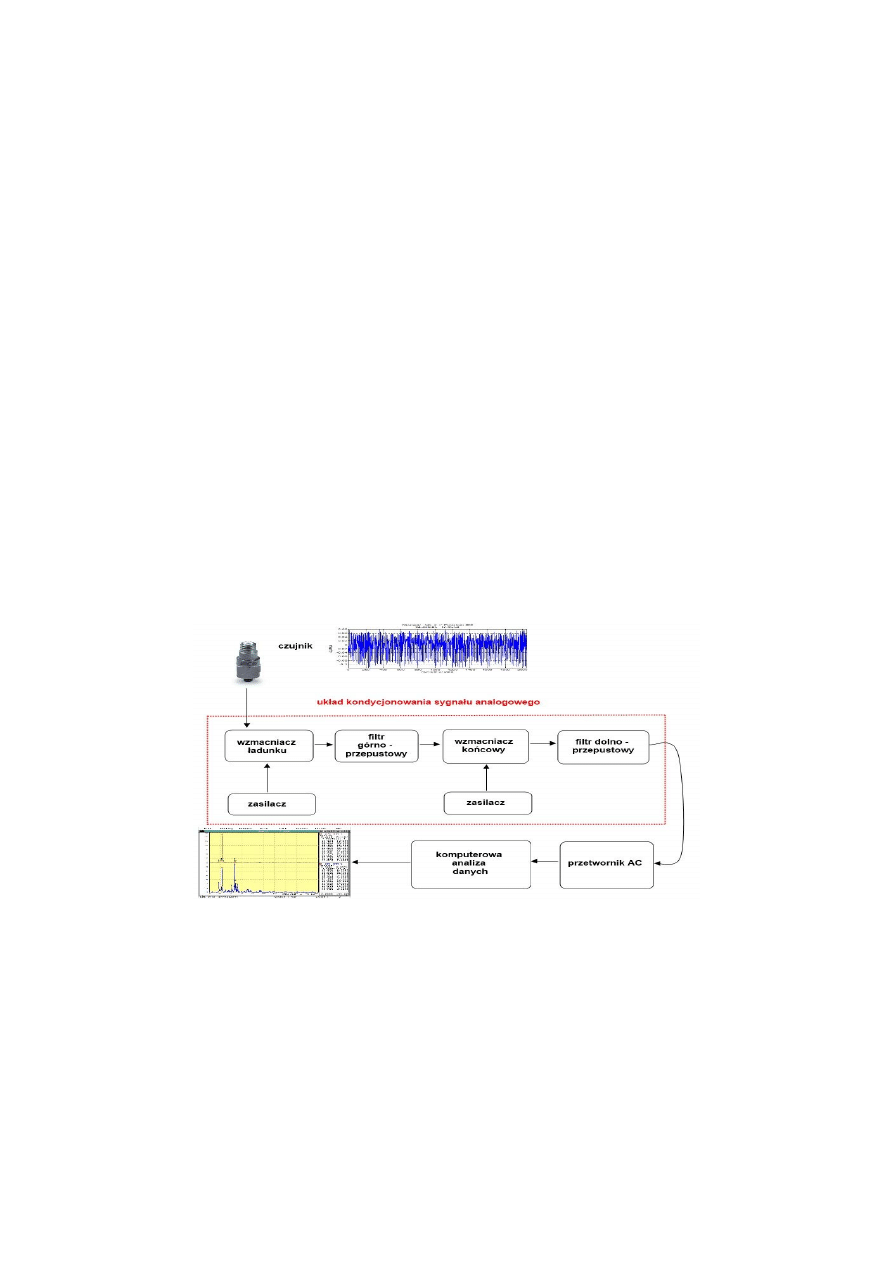
przyrządów pomiarowych. Przykładowy układ pokazano na rysunku 4.1.
Rys 4.1. Schemat układu pomiarowego drgań mechanicznych
Zasadniczym elementem układu pomiarowego jest czujnik, który umożliwia określenie
przebiegu drgań w czasie w postaci sygnału analogowego. Obecnie są stosowane do pomiaru
drgań rożnego typu przetworniki wielkości mechanicznych na wielkości elektryczne.
Generalnie można wyodrębnić czujniki do pomiarów drgań bezwzględnych oraz drgań
względnych. Do klasy czujników do pomiaru drgań bezwzględnych należą akcelerometry
piezoelektryczne i czujniki elektrodynamiczne z masą sejsmiczną. Natomiast pomiar drgań
względnych wykonuje się najczęściej czujnikami bezstykowymi takimi jak: czujniki
zbliżeniowe elektromagnetyczne i indukcyjne, czujniki zbliżeniowe wiroprądowe, czujniki
zbliżeniowe pojemnościowe. Większość z czujników zbliżeniowych może być stosowana do
pomiaru drgań elementów tylko o własnościach ferromagnetycznych.

Uzyskany z czujnika sygnał elektryczny jest sygnałem małej mocy rzędu mikro lub
miliwatów wymagającym dużej oporności wejściowej, aby zapewnić właściwe ich działanie.
Napięcie sygnału osiąga wartość od kilku do kilkudziesięciu mV. Przyrządem, który zapewni
właściwe działanie czujnika i umożliwia zwiększenie napięcia wyjściowego sygnału z
czujnika jest wzmacniacz ładunku (lub napięcia) sygnału elektrycznego. W najnowszych
rozwiązaniach są stosowane wzmacniacze zintegrowane z czujnikiem, które umożliwiają
znaczne zwiększenie stosunku poziomu sygnału pomiarowego do poziomu zakłóceń. Nie
wyklucza to jednak stosowania w połączeniu kaskadowym wzmacniacza końcowego sygnału.
W układzie pomiarowym stosowanym do monitorowania maszyn wirnikowych włącza się
dodatkowo moduł znacznika fazy, który umożliwia zidentyfikowanie fazy drgań w
odniesieniu do położenia kątowego wału, a także może posłużyć do śledzenia obrotów wału i
zmian prędkości obrotowej wału. Bardzo ważnym elementem układu pomiarowego jest
zespół filtrów sygnału analogowego. Filtr umożliwia eliminowanie składowych
harmonicznych z widma amplitudowego sygnału w wybranym zakresie częstotliwości. Ma to
duże znaczenie w badaniach spektralnych i minimalizowaniu zakłóceń.
Wzmacniacze, filtry i zasilacze połączone szeregowo tworzą układ kondycjonowania
sygnałów. Analogowe sygnały elektryczne z tego układu są przesyłane do elektronicznego
układu przetwarzającego sygnał analogowy w dyskretny sygnał cyfrowy. Układ ten jest
zwany przetwornikiem analogowo cyfrowym (konwerterem AC). Zespół, najczęściej
kilkunastu przetworników mogących obsługiwać kilka kanałów analogowych, tworzy kartę
analogowo-cyfrową. Możliwość, a także i potrzeba stosowania przetworników AC pojawiła
się wraz z powszechną dostępnością przenośnych komputerów. Karta analogowo-cyfrowa
bardzo często jest tak konstruowana aby mogła być bezpośrednio podłączona do magistrali
komputera (BUS). Jest ona umieszczana w 16-bitowych złączach (ISA lub PCI) płyty głównej
komputera.
Najważniejszymi parametrami kart analogowo – cyfrowych są częstotliwość
próbkowania i szybkość transmisji danych do pamięci operacyjnej. Parametry te mają
zasadnicze znaczenie przy wyborze filtrów w układzie kondycjonowania sygnału
analogowego [1].
Przetwarzanie drgań na postać elektryczną, to zamiana energii drgań źródła na energię
sygnału elektrycznego. Przetwarzanie to jest realizowane za pośrednictwem czujników drgań.
Czujnik drgań lub wibracji jest zwykle przetwornikiem mechano - akustycznym
przyspieszeniowym lub prędkościowym. Jego siła elektromotoryczna jest proporcjonalna do
składowej przyspieszenia (lub prędkości), równoległej do kierunku ruchu elementu czynnego
czujnika. Czujniki przyspieszeń, zwane też akcelerometrami, są najczęściej przetwornikami
piezoelektrycznymi, które na zaciskach wyjściowych wytwarzają sygnał elektryczny –
proporcjonalny do przyspieszenia, któremu został poddany. Akcelerometry pracują w
szerokim zakresie częstotliwości od ułamków herca do około 20000Hz. Czujniki prędkości są
zwykle przetwornikami magnetoelektrycznymi lub elektromagnetycznymi. Odznaczają się
gorszymi parametrami niż czujniki przyspieszeń i z tego powodu, w technice pomiarowej są
prawie nie stosowane. Czujniki drgań muszą współpracować z odpowiednim typem
przedwzmacniacza, co umożliwia zastosowanie np.: długich kabli pomiędzy przetwornikiem
a stopniem wejściowym przyrządu pomiarowego lub rejestratora. Różnorodność rozwiązań
konstrukcyjnych akcelerometrów może na pierwszy rzut oka utrudnić właściwy wybór
przetwornika, jednakże akcelerometry uniwersalne ogólnego przeznaczenia zaspokajają dużą
część zapotrzebowania na czujniki drgań systemów diagnostycznych [1].
Przy pomiarach i rejestracji drgań o bardzo niskich lub bardzo wysokich poziomach
należy uwzględnić zakres dynamiki akcelerometru. Dolna granica jest spowodowana
szumami przedwzmacniacza, natomiast górna jest określona wytrzymałością mechaniczną
samego akcelerometru. Typowy czujnik przyspieszenia ma liniową dynamikę w zakresie 50 ÷

100000 m/s
2
. Tak wysoki poziom występuje przy pomiarach udarów mechanicznych. Bardzo
ważnym czynnikiem, mającym wpływ na jakość przetwarzania za pomocą akcelerometru, jest
jego zamocowanie. Akcelerometr powinien być zamocowany w ten sposób, by jego główna
oś czułości pokrywała się z kierunkiem pomiaru. Czułość poprzeczna jest niewielka i wynosi
zwykle 1 ÷ 2 % poniżej czułości wzdłuż osi. Luźne zamocowanie akcelerometru powoduje
obniżenie częstotliwości rezonansowej czujnika, co z kolei implikuje zmniejszenie
użytecznego zakresu częstotliwości. Optymalny sposób montażu czujnika przyspieszeń
polega na jego przykręceniu (o ile to możliwe) do powierzchni pomiarowej za pomocą
specjalnego wkrętu.
Pod wpływem drgań na wyjściu czujnika drgań pojawia się sygnał elektryczny jako
odwzorowanie zmian procesu drganiowego. Sygnał na wyjściu akcelerometru może być
wykorzystywany w następujący sposób:
a) może być poddany przetwarzaniu i analizie w czasie rzeczywistym, co jest
realizowane za pomocą przyrządów pomiarowych i analizujących współpracujących
z danym przetwornikiem,
b) może być zarejestrowany w oryginalnej postaci analogowej, na odpowiednim
nośniku magnetycznym lub pamięci masowej typu USB flash,
c) może zostać zarejestrowany w postaci cyfrowej.
Ze względu na fakt, że pewna część pomiarów diagnostycznych musi być wykonywana
w terenie bądź w miejscach i sytuacjach oddalonych od aparatury diagnostycznej, istnieje
potrzeba rejestracji sygnału diagnostycznego w postaci analogowej. Rejestracja analogowych
sygnałów diagnostycznych ma wiele zalet:
a)
istnieje możliwość łatwego usunięcia poprzedniego, zbędnego zapisu sygnału,
b)
stosowanie pamięci typu USB flash pozwala na długi czas rejestracji,
c)
zapis analogowy jest mało kosztowny,
d)
łatwy sposób archiwizowania i analizy sygnałów pomiarowych.
Zarejestrowany sygnał analogowy u(t) zawiera, oprócz sygnału użytecznego, składowe
zniekształcające, pochodzące od źródeł zakłócających oraz parametrów czujników. Zatem
zapisany sygnał, w dalszych procedurach przetwarzania i analizy, będzie poddawany
przekształceniom, mającym na celu wydobycie z niego interesujących informacji
diagnostycznych a jednocześnie usunięcie informacji nadmiarowych lub szkodliwych. Należy
pamiętać o podstawowej zasadzie w trakcie pomiarów, że jeśli na wyjściu przyrządu
pomiarowego nie uzyskaliśmy odpowiednich informacji diagnostycznych, to dalsze operacje
na tym sygnale tej informacji nie zwiększą [1].
Kolejnym etapem procesu komputerowego przetwarzania sygnału diagnostycznego,
najczęściej po analogowych procedurach wstępnej obróbki, jest wprowadzenie tego sygnału
do pamięci komputera. Pamięć komputera składa się z tzw. komórek, w których można
umieścić kody reprezentujące np. liczby z określonego przedziału wartości odwzorowane z
określoną dokładnością. Ze względu na to, że sygnał wibroakustyczny jest przebiegiem
ciągłym, trwającym określony czas i przyjmującym wartości napięcia z czujnika zmieniające
się też w sposób ciągły, to występuje oczywista konieczność przetworzenia informacji z
postaci ciągłego sygnału do postaci kodów komputerowych. Przetwarzanie to składa się na
ogół z trzech etapów:
a) próbkowania, czyli dyskretyzacji czasowej sygnału,
b) dyskretyzacji amplitudowej, czyli inaczej kwantyzacji,
c) kodowania sygnału do postaci akceptowanej przez komputer.
Realizację przetwarzania uzyskuje się za pośrednictwem ważnego urządzenia zwanego
przetwornikiem
analogowo-cyfrowym
(A/C). Przetwornik
analogowo-cyfrowy jest
urządzeniem, które przetwarza wejściowy ciągły sygnał elektryczny w sygnał cyfrowy,
będący sekwencją liczb aproksymujących (przybliżających) odpowiednie próbki sygnału
wejściowego. W dyskretyzacji czasowej sygnału mowy (i każdego innego sygnału) istotnym
problemem jest określenie tzw. kroku próbkowania, czyli przedziału czasu, co jaki mają być
pobierane przez komputer pomiary chwilowych wartości, ponieważ tylko te chwilowe
wartości zostaną następnie zamienione na kody i wprowadzone do określonych komórek
pamięci komputera. Ustalenie zbyt dużej wartości kroku próbkowania, czyli zbyt rzadkie
pobieranie próbek spowoduje, że pewne informacje zostaną pominięte i nastąpi utrata
informacji, niemożliwa do odrobienia przez dalsze procedury. Zbyt mały krok dyskretyzacji
spowoduje z kolei wprowadzenie informacji nadmiarowych, zajmujących miejsce w
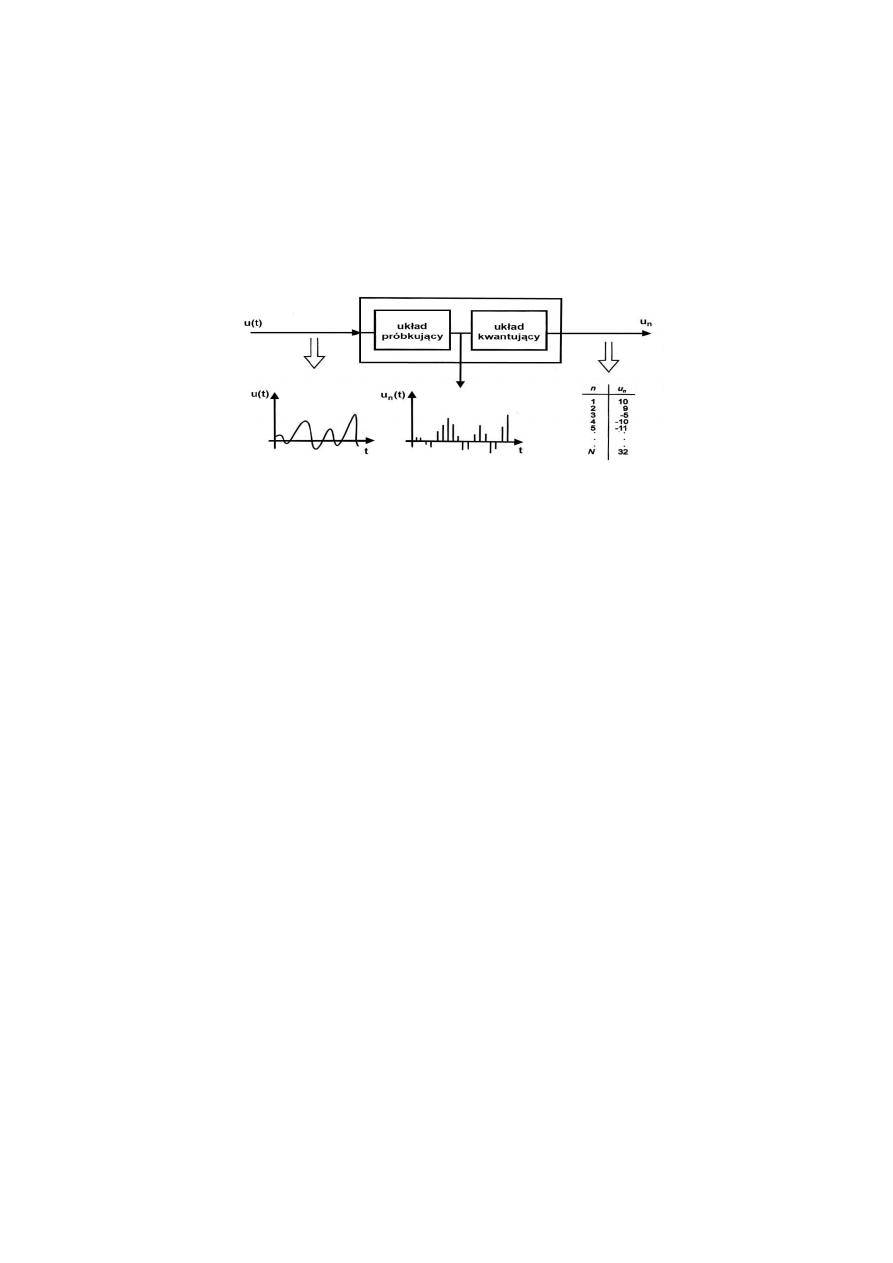
nośnikach pamięci i wydłużających obliczenia. Idea przetwarzania analogowo – cyfrowego
przedstawiona została na rysunku 4.2.
Rys.4.2. Idea przetwarzania analogowo – cyfrowego [1]
Przy wyborze kroku próbkowania
t, wyrażanym najczęściej pod postacią
częstotliwości próbkowania f
p
= l/
t, opieramy się na twierdzeniu Shannona. Krok
próbkowania określa się na podstawie znajomości górnej częstotliwości sygnału.
Częstotliwość tę ustalamy za pomocą filtru anty-aliasowego, dolnoprzepustowego o
częstotliwości granicznej f
n
= l/2
t. Inaczej mówiąc, krok próbkowania zapewniający
optymalne przeniesienie potrzebnych informacji do dalszej analizy jest równy co najwyżej
połowie odwrotności maksymalnej częstotliwości sygnału mowy. Wiąże się to np. z
koniecznością pobierania próbek sygnału co 0,000142857 sekundy dla częstotliwości górnej
sygnału mowy (f
n
= 3,5 kHz), a w sytuacji odwzorowywania pełnego pasma akustycznego
(20 kHz) co 0,000025 s. Dyskretyzacja amplitudowa lub inaczej kwantyzacja potrzebna jest w
tym celu, aby wartość próbki sygnału wyrazić w postaci liczby o skończonej liczbie cyfr,
gdyż tylko taka liczba może być wprowadzona do komputera.
Problem liczby cyfr, za pomocą których odwzorowuje się wartości próbek sygnału jest
pod pewnymi względami podobny do problemu wyboru kroku próbkowania. Tu również
obowiązuje zasada, że im więcej cyfr opisuje daną próbkę, tym dokładniej sygnał jest
odwzorowany. Z kolei zajętość pamięci komputera rośnie proporcjonalnie do liczby cyfr i
stąd również wynika potrzeba rozsądnego kompromisu w dokładności odwzorowania
poziomów próbek. Trzeci etap – kodowanie, jest przy dostępnych obecnie środkach
technicznych prosty i łatwy, a wybór możliwych kodów jest bogaty. Zazwyczaj dobierając
kod, kierujemy się właściwościami systemu wejściowego używanego komputera.
W wyniku przetwarzania analogowo-cyfrowego powstaje charakterystyczne zakłócenie
sygnału zwane szumem kwantyzacji. Poza szumem kwantyzacji przetwarzanie analogowo-
cyfrowe może wprowadzać jeszcze inne błędy i zniekształcenia:
a) migotanie, czyli efekt powstający z losowych wahań długości okresu próbkowania
t,
które ma wpływ na kształt widma gęstości mocy G ( f ) ,
b) zniekształcenia aperturowe, tzn. błędy wynikające ze skończonego czas pobrania próbki,
c) nieliniowość, czyli błędy powstające na skutek niedomagań przetwornika a/c, np. na
skutek przekłamania bitów, złego rozmieszczania kwantyzacji itp.
Zapis cyfrowy sygnałów drganiowych charakteryzuje się wysokim stopniem
standaryzacji, umożliwiającym wymianę danych pomiędzy różnymi urządzeniami i
systemami komputerowymi oraz ma następujące zalety:

a) nie wymaga dużego zakresu dynamiki (pamiętanie jedynie dwóch poziomów),
b) zapisane dane mogą być odczytywane synchronicznie, co zmniejsza błędy czasowe,
c) pozwala na uzyskanie bardzo dużej dokładności odwzorowania sygnału.
Posługując się zapisem cyfrowym należy pamiętać, że każdy sygnał jest zapisany i
odbierany jako jedna liczba, a nie jak w zapisie analogowym, że jest to wartość z ciągu
zależnych wartości. W zapisie analogowym była możliwość wygładzania sygnału w
przypadku zaistnienia chwilowego zakłócenia. W zapisie cyfrowym taka regeneracja jest
niemożliwa [1].
4.3. CZUJNIKI DRGAŃ
Różnorodność celów i warunków prowadzenia eksperymentu pomiarowego, jak również
żądań co do wyników metod ich opracowywania pociągają za sobą ogromną liczbę
możliwych wariantów budowy informacyjnych systemów pomiarowych, przez co nie można
mówić o ich unifikacji. Do podstawowych elementów pomiarowych zaliczymy przetwornik
pomiarowy, który służy do przetworzenia z określoną dokładnością i według określonego
prawa wartości wielkości mierzonej na wartości innej wielkości. Przetworniki zbudowane są
z trzech rodzajów elementów podstawowych:
elementy powodujące straty energii (generowanej przez badany obiekt) rozpraszanej na
energię cieplną, np. w wyniku tarcia, występowania rezystancji w układach
elektrycznych, oporu przepływu gazów i cieczy,
elementy magazynujące energię z obiektu w postaci kinetycznej (masa, indukcyjność w
układach elektrycznych),
elementy magazynujące energię obiektu w postaci potencjalnej (sprężyny w układach
mechanicznych, pojemność w układach elektrycznych, sprężony gaz).
W układach pomiarowych wielkości nieelektrycznych stosowane są przetworniki, w
których następuje przetworzenie tej wielkości na wielkość elektryczną. Najbardziej
rozpowszechnionym przetwornikiem do pomiaru drgań jest akcelerometr piezoelektryczny.
Najistotniejszą częścią piezoelektrycznego czujnika jest płytka materiału piezoelektrycznego.
Element piezoelektryczny poddany działaniu sił mechanicznych (rozciąganie – ściskanie)
generuje ładunek elektryczny, proporcjonalny do działających sił. Sygnał wyjściowy jest
proporcjonalny do przyspieszeń i mieści się w granicach od 1 do 10 mV∙ms
-2
(czułość
czujnika).
Ciężar czujnika jest istotny przy pomiarze drgań lekkich konstrukcji, gdzie przyłożenie
dodatkowej masy (w postaci masy czujnika) może znacząco zmienić zarówno częstotliwość,
jak i poziom drgań, co ma wpływ na wnioskowanie. Stąd też do badań powinno się używać
czujników, których masa nie przekracza 1/10 masy badanego elementu [32].
Element piezoelektryczny w czujniku umieszczony jest w ten sposób, że podczas
wibracji poddawany jest działaniu siły reakcji masy. Siła ta jest proporcjonalna do
przyspieszenia i określona drugim prawem Newtona: siła = masa x przyspieszenie.
Dla
częstotliwości znacznie niższych niż częstotliwość rezonansowa całkowitego układu (typu
masa – sprężyna) przetwornika, przyspieszenie masy równa się przyspieszeniu podstawy.
Oznacza to, że wartość sygnału wyjściowego jest proporcjonalna do przyspieszenia, któremu
poddawany jest przetwornik. Najbardziej rozpowszechnione są dwa rozwiązania
konstrukcyjne:
przetwornik działający na zasadzie kompresji, w którym masa wywiera siłę kompresji
działającą na piezo-czuły element.
przetwornik typu nożycowego, w którym masa wywiera siłę tnącą na piezoelektryczny
element czujnika.
Różnorodność rozwiązań konstrukcyjnych akcelerometrów może pozornie utrudnić
właściwy wybór przetwornika, jednakże akcelerometry uniwersalne ogólnego przeznaczenia
zaspokajają na ogół większość wymagań pomiarowych. Czułość ich zawiera się w granicach
od 1 do 10mV lub pC∙ms
-2
, a konstrukcja umożliwia zarówno boczne, jak i górne podłączenie
kabla.
Czułość w typach Uni – Gain® jest znormalizowana do okrągłej liczby 1 lub 10 pC∙ms
-2
,
co znacznie ułatwia kalibrację systemu pomiarowego. Dostępne są również akcelerometry
innych typów przystosowane do specjalnych wymagań, jak np. miniaturowe przetworniki
przeznaczone do pomiarów wysokich poziomów wibracji lub wysokich częstotliwości
delikatnych konstrukcji, paneli itp. Ich ciężar wynosi zaledwie 0,5 – 2 gramów. Inne typy
przetworników przeznaczone do pomiarów specjalnych obejmują akcelerometry do:
jednoczesnego pomiaru drgań w trzech wzajemnie prostopadłych kierunkach, pomiarów przy
wysokich temperaturach, pomiarów bardzo niskich poziomów drgań, pomiarów udarów,
porównawczej kalibracji innych akcelerometrów oraz ciągłego monitorowania maszyn
przemysłowych.
Zwykle pożądany jest wysoki poziom sygnału wyjściowego; niestety, pociąga to za sobą
zwiększone wymiary fizyczne, a co za tym idzie - masę. Niezbędny jest więc pewien
kompromis w trakcie doboru akcelerometru do pomiarów. Na ogół czułość nie jest
parametrem krytycznym, gdyż współczesne przedwzmacniacze przystosowane są do
współpracy z sygnałami o niskim poziomie.
Masa akcelerometru staje się istotna przy pomiarach przeprowadzanych na lekkich
strukturach. Dodatkowa masa może znacznie zmienić zarówno częstotliwość, jak i poziom
wibracji w punkcie pomiarowym. Przyjmuje się, że masa akcelerometru nie powinna
przewyższać 1/10 dynamicznej masy wibrującej części, do której czujnik jest przymocowany.
Przy pomiarach sygnałów o bardzo niskich lub wysokich poziomach przyspieszenia należy
także wziąć pod uwagę zakres dynamiczny akcelerometru. Dolna granica spowodowana jest
zwykle szumami wzmacniacza oraz kabli i jest rzędu 1/100 m∙s
-2
. Górna granica określona
jest poprzez wytrzymałość samego akcelerometru. Typowy czujnik uniwersalny posiada
liniową dynamikę od 50 do 100.000 m∙s
-2
. Tak wysokimi poziomami sygnału charakteryzują
się przyspieszenia typu udarowego. Do pomiarów udarów mechanicznych stosuje się
specjalnie skonstruowane akcelerometry liniowe, do 1000 km∙s
-2
(100.000 g) [32].
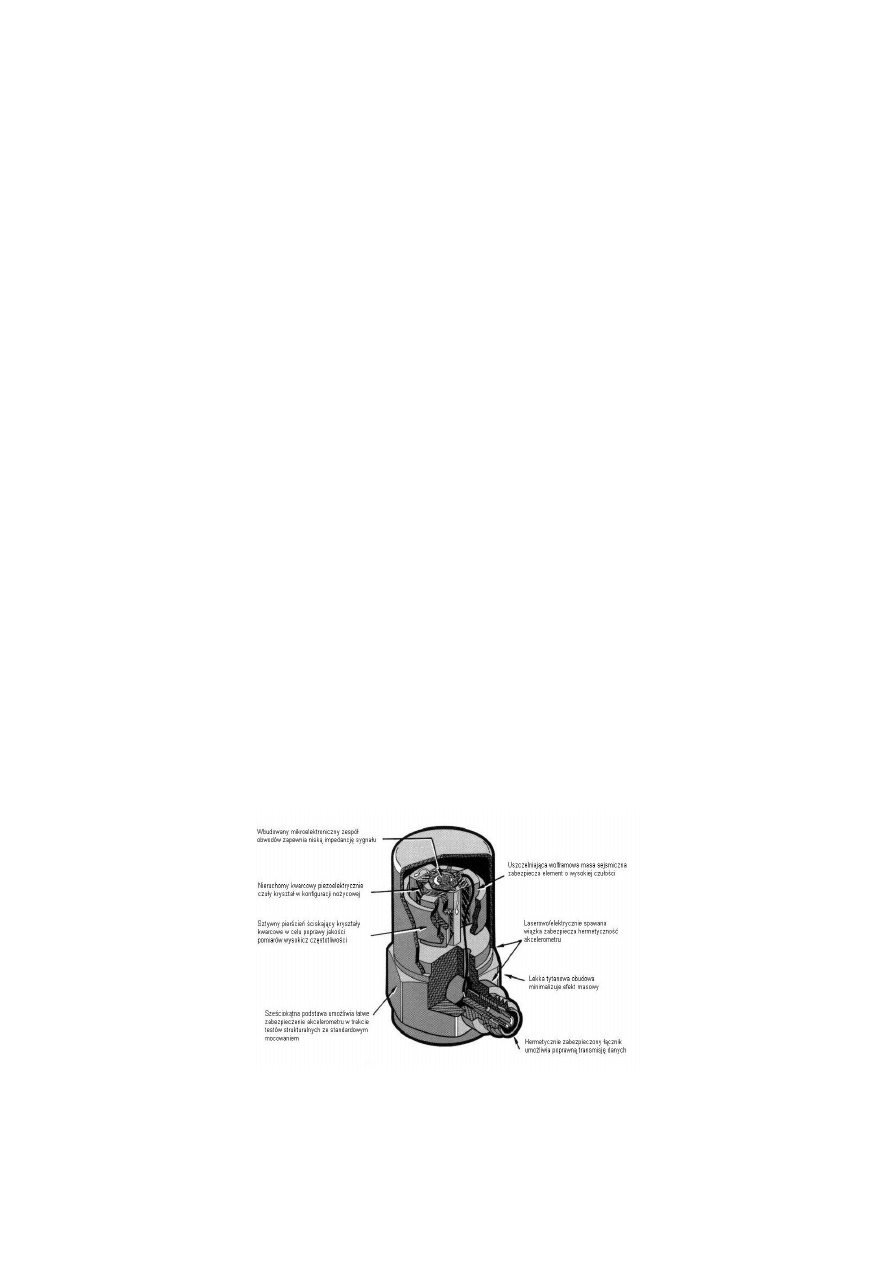
Na rysunku 4.3. przedstawiono schemat konstrukcji typowego piezoelektrycznego
czujnika ICP z kwarcowymi kryształami piezoelektrycznymi, powszechnie stosowanego w
laboratoriach do testów strukturalnych.
Rys.4.3. Schemat czujnika piezoelektrycznego w konfiguracji nożycowej [32]
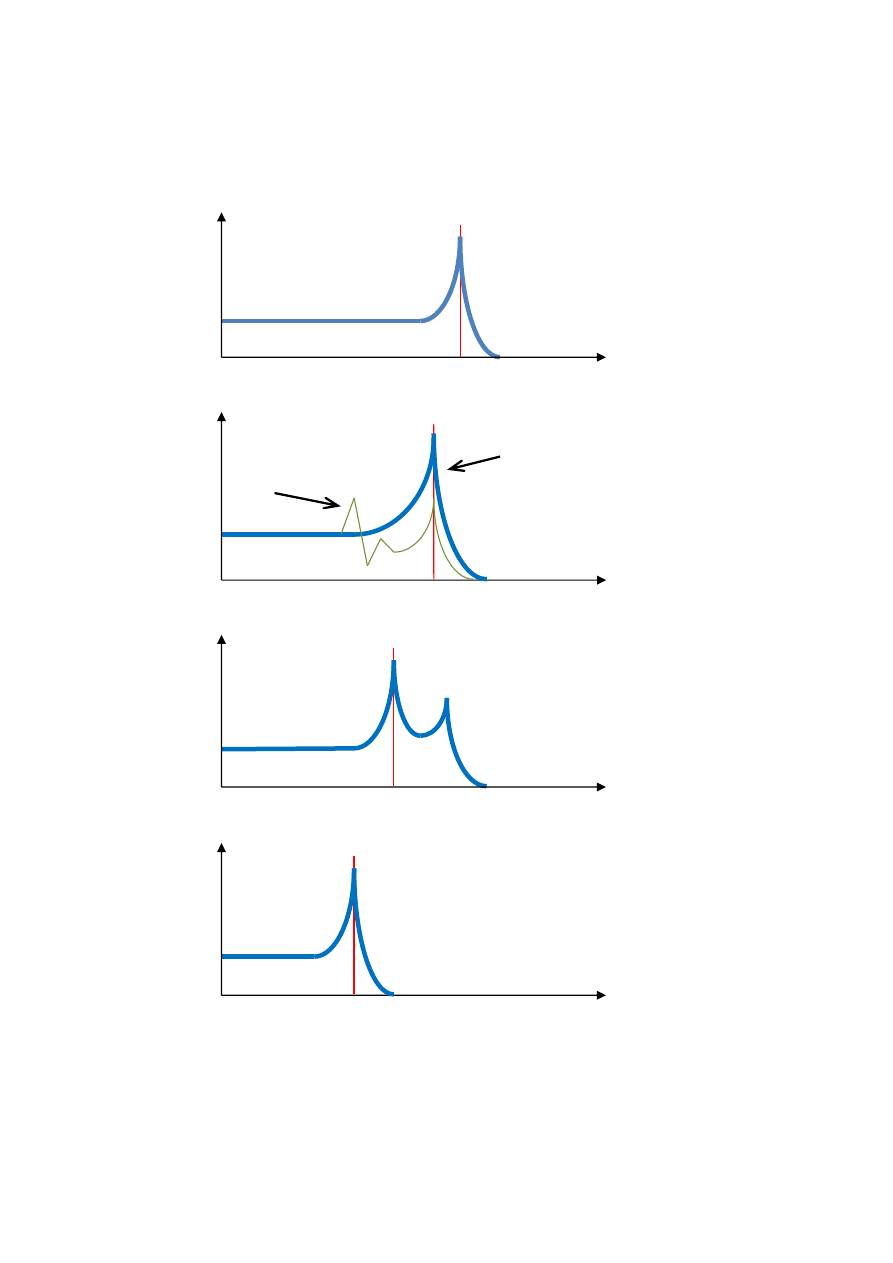
Mimo, że zakres częstotliwości energii większości systemów mechanicznych wynosi od
10 do 1000Hz, to jednak bardzo często przeprowadza się pomiary do 10kHz. Zakres
częstotliwości jest istotnym parametrem przy wyborze czujnika przyspieszeń. W zakresie
niskich częstotliwości na otrzymanie prawdziwego i dokładnego sygnału drgań ma wpływ
przedwzmacniacz współpracujący z czujnikiem. Górna częstotliwość graniczna określona jest
rezonansem mechanicznym samego akcelerometru. W praktyce maksymalna górna
częstotliwość przyjmowana jest jako 1/3 częstotliwości rezonansowej przetwornika. Błąd
pomiaru składowych drgań o częstotliwościach zbliżonych do tej granicy nie przekroczy
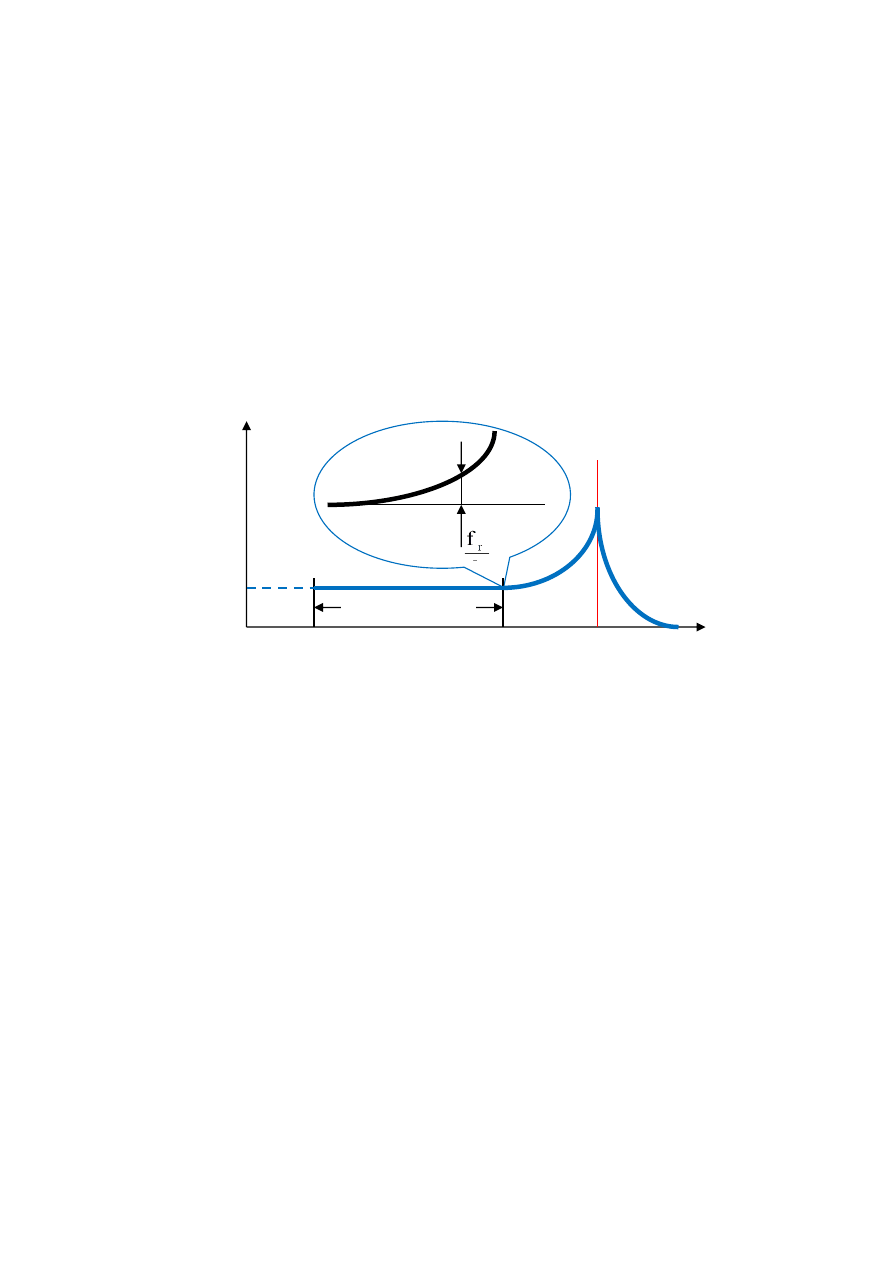
wówczas 12%. Częstotliwość rezonansowa dla czujników uniwersalnych wynosi zwykle 20 –
30 kHz. Użyteczny zakres częstotliwości akcelerometru przedstawiono na rysunku 4.4 [32].
Na ogół czułość akcelerometru zwiększa się znacznie przy wysokich częstotliwościach z
powodu rezonansu. Dlatego też sygnał wyjściowy otrzymany przy tych częstotliwościach nie
jest prawdziwym obrazem drgań punktu pomiarowego. Przy pomiarach szerokopasmowych
uzyskane wyniki są błędne, jeżeli drganie mierzone posiada składowe o częstotliwościach
znajdujących się w pobliżu częstotliwości rezonansowej czujnika. W celu eliminacji błędów
pomiarowych dokonuje się wyboru akcelerometru o maksymalnym zakresie częstotliwości
oraz stosuje odpowiednie filtry dolnoprzepustowe.
Rys. 4.4. Użyteczny zakres częstotliwości akcelerometru [32]
Wyniki pomiarów drgań zależą od metody mocowania akcelerometru. Luźne
mocowanie prowadzi do obniżenia częstotliwości rezonansowej, co z kolei równoznaczne jest
ze zmniejszeniem użytecznego zakresu częstotliwości czujnika. Na rys. 4.5 przedstawiono
wybrane sposób montowania czujnika piezoelektrycznego. Spośród przedstawionych
przykładów mocowanie na wkręt jest rozwiązaniem optymalnym ale nie zawsze możliwym
do zastosowania w praktyce. W tym rozwiązanie, specjalny wkręt przytrzymuje akcelerometr
na gładkiej i płaskiej powierzchni. Maksymalną sztywność montażu otrzymuje się smarując
powierzchnię pomiarową cienką warstwą smaru. Częstotliwość rezonansowa przy tego
rodzaju montażu wynosi ok. 32 kHz i nie odbiega od częstotliwości rezonansowej otrzymanej
na stanowisku kalibracyjnym. Inną metodą jest przyklejenie czujnika za pomocą wosku
pszczelego. Częstotliwość rezonansowa jest nieznacznie zredukowana. Ze względu na
stopniowe topnienie wosku, maksymalna temperatura pracy wynosi 40 st. C. Czujnik można
umieścić na badanym obiekcie również za pomocą kleju, magnesu, a także można przyłożyć
poprzez penetrator (ręczna sonda) [32].
Istnieje wiele rozwiązań konstrukcyjnych czujników piezoelektrycznych, a jako jedne z
podstawowych do zastosowań w badaniach diagnostycznych można zaliczyć jednoosiowe
czujniki przyśpieszeń drgań firmy PCB Piezotronice typu ICP model 352C68, które
charakteryzują się następującymi parametrami technicznymi:
czułość 100 mV/g (± 10%),
zakres pomiarowy: ± 50 g pk (± 491 m/s
2
pk),
Sk
utecz
no
ść
Dolna
częstotliwość
graniczna
Górna
częstotliwość
graniczna
Użyteczny zakres
pomiarowy
Częstotliwość
Częstotliwość
rezonansu
12%
szerokość pasma: (od 1 do 10000 Hz),
zakres częstotliwości: (± 5%) 0,5 do 10000 Hz,
waga: 2,0 g.
a) mocowanie akcelerometru na wkręt:
b) mocowanie akcelerometru na klej:
c) mocowanie akcelerometru za pomocą magnesu:
d) sonda ręczna:
Rys.4.5. Zakresy przenoszenia w zależności od sposobu mocowania akcelerometru [32]
Na rysunku 4.6 przedstawiono zdjęcie jednoosiowego czujnika przyśpieszeń drgań firmy
PCB Piezotronice typu ICP model 352C68, stosowanego w trakcie badań diagnostycznych na
stanowisku badawczym.
32 kHz
Częstotliwość
Sk
ut
ec
zn
oś
ć
Sk
ut
ec
zn
oś
ć
7 kHz
Częstotliwość
Sk
ut
ec
zn
oś
ć
2 kHz
Częstotliwość
28 kHz
Częstotliwość
Sk
ut
ec
zn
oś
ć
Klej miękki
Żywice epoksydowe
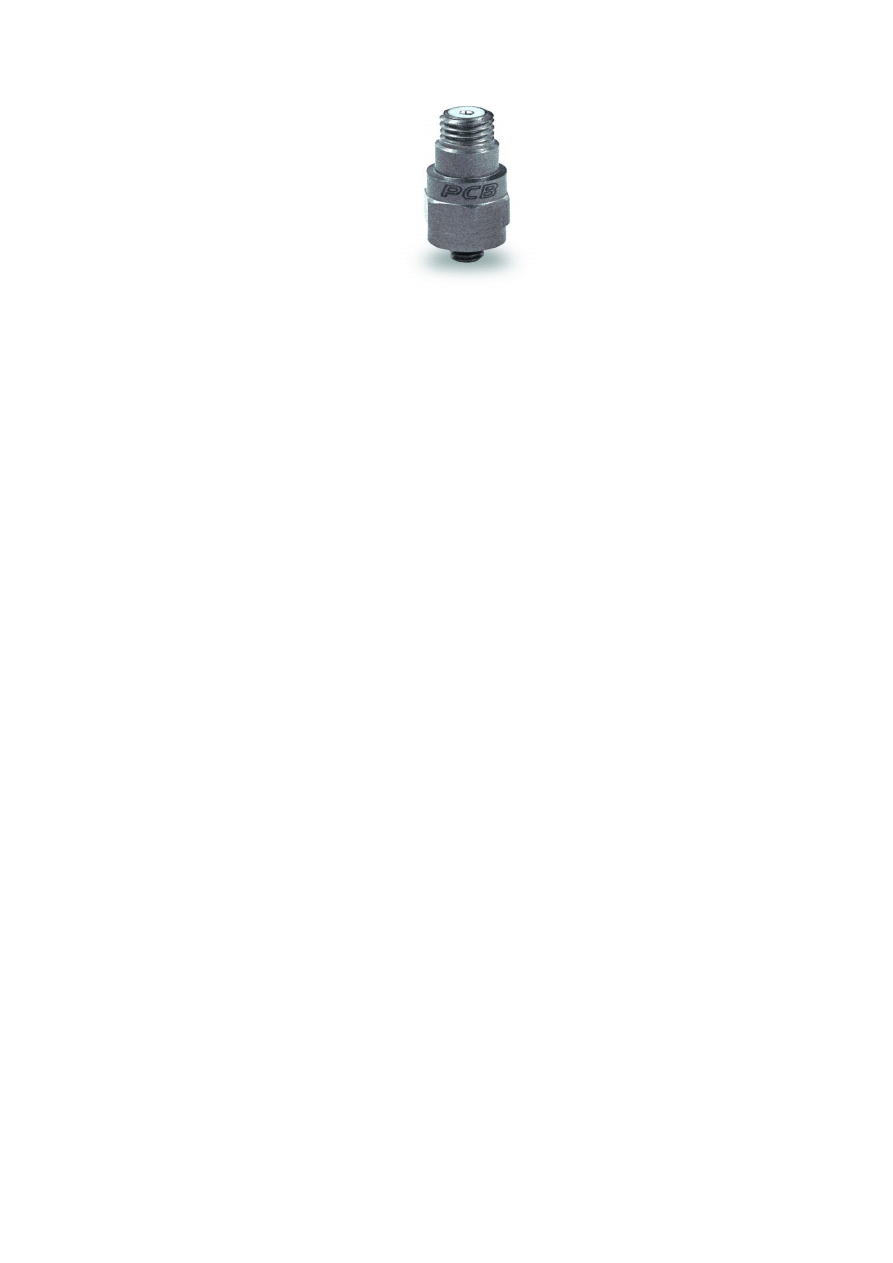
Rys. 4.6. Czujniki przyśpieszeń drgań PCB Piezotronice typu ICP model 352C68 [36]
Należy zaznaczyć, iż postęp w dziedzinie projektowania, konstruowania i wdrażania do
przemysłu czujników przyśpieszeń drgań jest tak duży, że nie sposób go ogarnąć
syntetycznie. Nie sposób zatem w kilku słowach przedstawić wyczerpująco te zagadnienia,
trzeba je śledzić na bieżąco.
4.4. SYSTEMY POMIAROWE
Rosnący stopień złożoności nowoczesnych maszyn i pojazdów oraz rosnące wymagania
bezpieczeństwa zmuszają konstruktorów i użytkowników tych obiektów do nadzorowania ich
bieżącego stanu technicznego. Staje się to możliwe, jeśli już na etapie projektowania
konstruktorzy zaimplementują w obiekcie urządzenia i procedury diagnostyczne. Problemy
diagnostyki maszyn obejmują następujące zagadnienia:
akwizycje i przetwarzanie informacji diagnostycznych,
budowę modeli i relacji diagnostycznych,
wnioskowanie diagnostyczne i wartości graniczne,
klasyfikacja stanów maszyny,
przewidywanie czasu kolejnego diagnozowania,
obrazowanie informacji decyzyjnych.
System pomiarowy dla celów współczesnej wibro-diagnostyki maszyn składa się z
dwóch podstawowych części:
- sprzętu, w którym wyróżnia się następujące moduły:
podsystem kondycjonowania i przetwarzania sygnałów,
podsystem przetwarzania sygnałów znacznika fazy,
podsystem komputera PC,
podsystem zasilania,
- oprogramowania, w którego skład wchodzą następujące moduły:
system operacyjny,
oprogramowanie modułów przetwarzania i analizy sygnałów,
oprogramowanie zapewniające komunikację pomiędzy warstwami systemu,
oprogramowanie do archiwizacji i przetwarzania danych pomiarowych,
oprogramowanie zarządzające pracą systemu (konfigurowanie i testowanie systemu,
inicjalizacja sesji pomiarowych itp.).
Przedstawiona struktura systemu pomiarowego wykorzystuje najnowsze rozwiązania
zarówno sprzętowe, jak i programowe. Zastosowane rozwiązania umożliwiają łatwą
rozbudowę systemu, oraz możliwości włączenia go do dowolnych systemów
diagnostycznych.
Różnorodność firm specjalizujących się we wdrażaniu nowoczesnych systemów
pomiarowych dotyczących akwizycji i analizy drgań i hałasu nie pozwalają na kompleksowe
przedstawienie wszystkich dostępnych systemów pomiarowych. Autorzy tej pracy w oparciu
o własne doświadczenia oraz posiadany sprzęt pomiarowy pragną przedstawić wybrane
systemy zarówno przenośne jaki i stacjonarne, które sprawdzają się w trakcie badań.
Pierwszym z prezentowanych systemów pomiarowych jest przenośny analizator dźwięku
i drgań SVAN 912AE, który jest cyfrowym analizatorem i miernikiem poziomu dźwięku oraz
drgań klasy 1 zgodnie z normami IEC 651, IEC 804, IEC 61672-1 [37]. Przyrząd ten jest
przeznaczony do wykonywania: pomiarów akustycznych, monitorowania hałasu
w środowisku, pomiaru zagrożeń w miejscu pracy, oceny wpływu drgań na człowieka oraz
monitorowania stanu maszyn.
Analizator wyposażony w mikrofon 1/4" umożliwia pomiar poziomu ultradźwięków w
pasmach 1/3 oktawy do częstotliwości 90 kHz. Analizator SVAN 912AE przedstawiono na
rysunku 4.7. Dzięki wbudowanym dwóm procesorom sygnałowym SVAN 912AE może na
bieżąco wykonywać analizę wąskopasmową (FFT) oraz analizę w pasmach oktawowych lub
tercjowych (łącznie z analizą statystyczną w tych pasmach).
Rys. 4.7. Przenośny analizator dźwięku i drgań SVAN 912AE [37]
Przyrząd jest wyposażony we wszystkie niezbędne, wymagane przez normy, filtry
korekcyjne A, C, G oraz Lin (Klasa 1: IEC 651, IEC 8041). Wyniki pomiarów mogą być
przedstawiane jako wartości skuteczne, wartości szczytowe, histogramy, wykresy czasowe
lub widma częstotliwości. Analizator pracuje w dwóch trybach: „meter mode” i „analyzer
mode” [37].
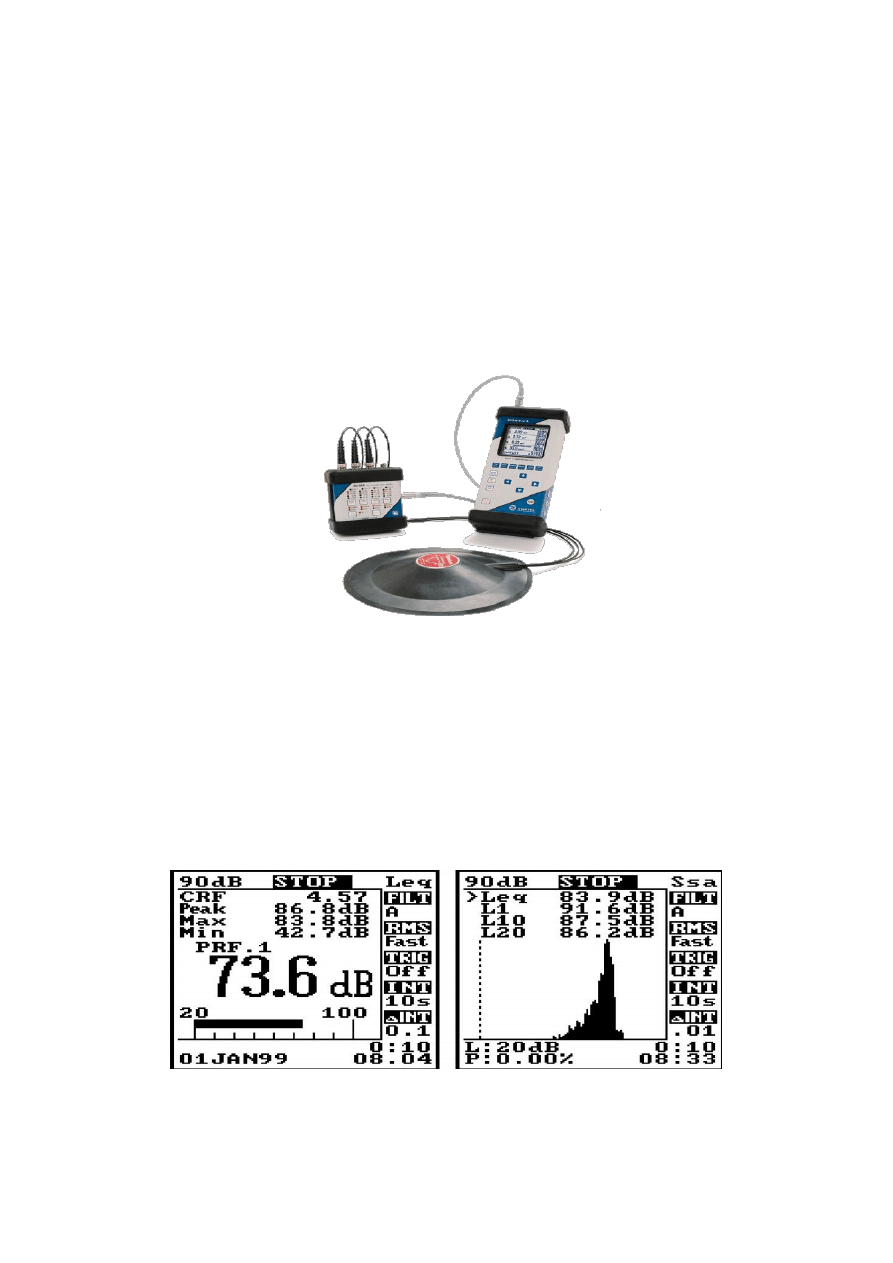
W trybie „METER MODE” możliwe jest wykorzystanie standardowych i
zaawansowanych funkcji całkującego miernika poziomu dźwięku oraz miernika drgań.
Pozwala również na dokonywanie pomiarów zgodnie z wymaganiami tzw. norm
pomiarowych (dla drgań są to normy ISO 2631 i ISO 5349). W tym trybie możliwy jest także
pomiar wartości skutecznej (RMS) – rys.4.8- sygnałów napięciowych [37].
Rys. 4.8. Widok ekranu przyrządu w trybie „METER MODE” [37]
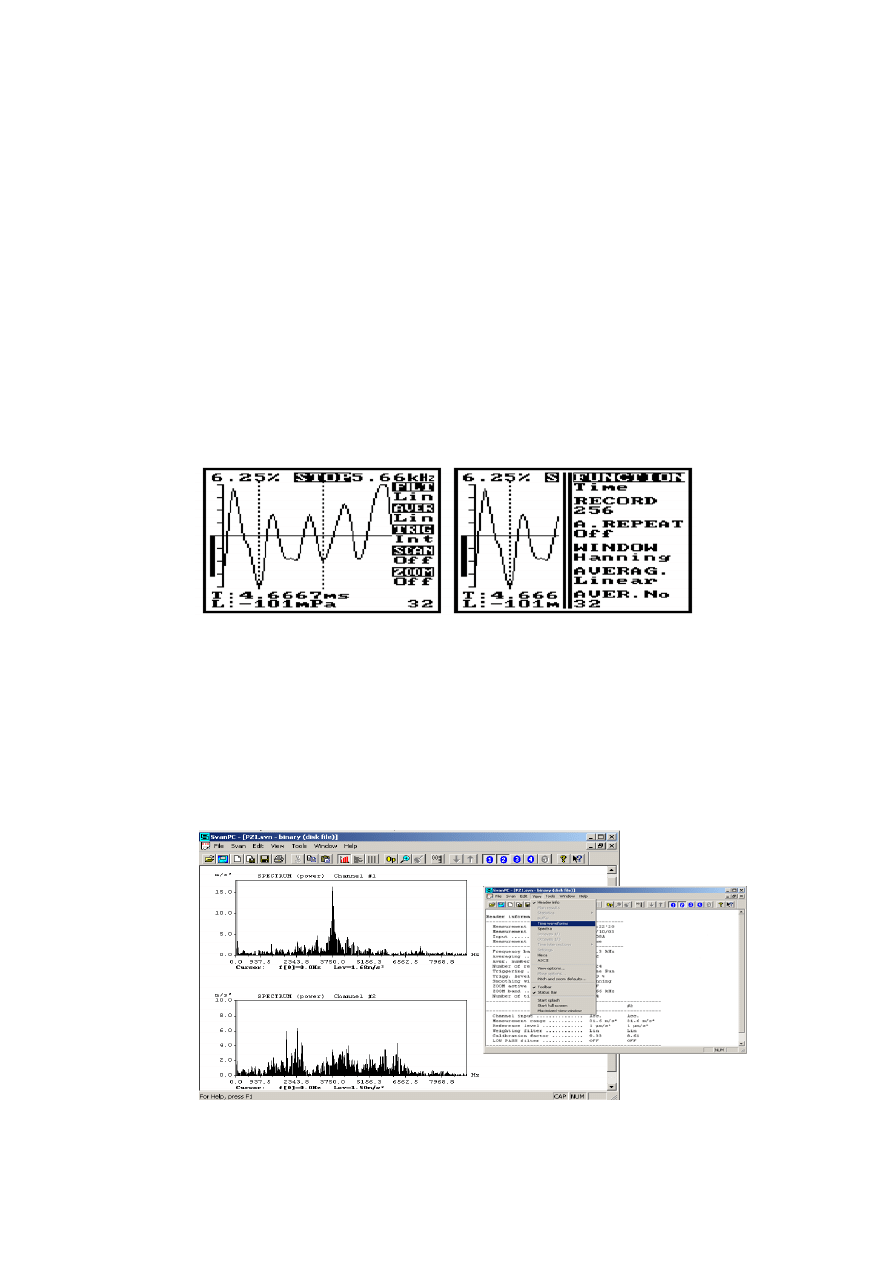
Tryb „ANALYZER MODE” pozwala użytkownikowi na obserwację i pomiar przebiegu
wejściowego w dziedzinie częstotliwości dla analizy oktawowej i tercjowej oraz w dziedzinie
czasu. Po przełączeniu analizatora w tryb pracy ekran podzielony jest na dwie części:
pole przeznaczone na graficzną prezentację sygnałów pomiarowych w obu dziedzinach
(wykresy widm lub przebiegi czasowe),
pole opisowe używane do wyświetlania tekstów.
Wyboru głównych funkcji analizy sygnałów można dokonać w polu „FUNCTION”, w
którym dostępne są następujące opcje:
Time – pomiar przebiegu czasowego,
Spectrum – analiza częstotliwościowa mierzonego sygnału prowadzona za pomocą
algorytmu szybkiego przekształcenia Fouriera (FFT),
1/1 Oct. – analiza częstotliwościowa mierzonego sygnału prowadzona za pomocą
filtrów cyfrowych w pasmach oktawowych,
1/3 Oct. – analiza częstotliwościowa mierzonego sygnału prowadzona za pomocą
filtrów cyfrowych w pasmach 1/3-oktawowych (tercjowych).
Na rysunku 4.9 przedstawiono przykładowy widok ekranu przyrządu w trybie
„ANALYZER MODE” dla analizy przebiegów czasowych sygnału [37].
Rys.4.9. Widok ekranu w trybie „ANALYZER MODE”, FUNCTION, funkcja Time [37]
Ponadto analizator został wyposażony w aplikację do analizy danych na stanowisku
komputerowym „Svan PC”, która umożliwia przeprowadzenie prostej analizy otrzymanych
wyników oraz eksport wyników do plików pomiarowych. Na rysunku 4.10 przedstawiono
interfejs okna głównego oprogramowania Svan PC.
Analizator SVAN 912AE może być stosowany do oceny stanowisk pracy oraz
szkodliwego oddziaływania hałasu i drgań na środowisko naturalne. Możliwe jest również
wykorzystanie analizatora w pomiarach laboratoryjnych oraz pracach związanych z
opracowaniem lub udoskonalaniem nowych produktów.
Rys. 4.10. Okno głównego oprogramowania Svan PC [37]
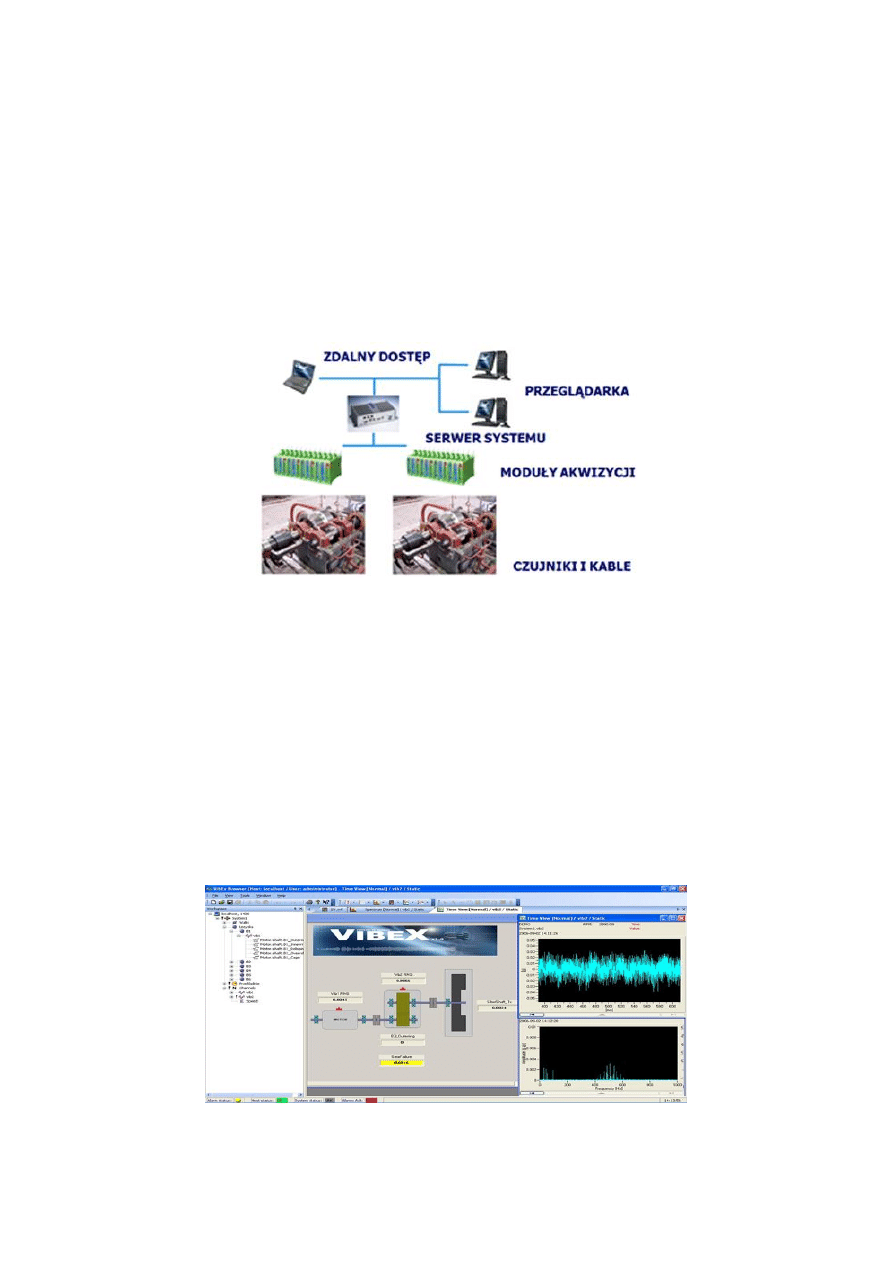
Inny system diagnostycznym stosowanym do monitorowania i diagnostyki maszyn jest
system „Vibex” firmy EC Systems [34]. Jest to nowoczesnym systemem monitorowania i
diagnostyki maszyn wirujących, ze szczególnym uwzględnieniem maszyn ułożyskowanych
tocznie. Łożyska toczne nadzorowane są za pomocą techniki wyznaczania obwiedni sygnału,
która pozwala na wykrycie zużycia elementu dużo szybciej niż algorytmy oparte na
normalnym widmie. Schemat systemu przedstawiono na rysunku 4.11, natomiast system
„Vibex” składa się z następujących elementów [34]:
czujniki drgań ICP,
moduły akwizycji VIBdin,
serwera systemu,
przeglądarka Vibex Browser.
Rys. 4.11. Schemat systemu „Vibex” [34]
Sygnały drgań mogą być pobierane z akcelerometrów (ICP) lub czujników
wiroprądowych. Dodatkowo system może pobierać sygnały wolnozmienne, które są
traktowane jako kanały procesowe (np. moc, prędkość obrotowa, temperatury, itp.). Po
zdefiniowaniu kanałów wejściowych, definiowana jest kinematyka nadzorowanej maszyny.
System automatycznie wyznacza prędkości obrotowe poszczególnych wałów i częstotliwości
charakterystyczne układu (przekładnie, łożyska). Następnie należy przypisać czujniki do
elementów maszyny, a system automatycznie definiuje i konfiguruje algorytmy
monitorowania maszyny. Stosowany jest szereg algorytmów, od podstawowej oceny stanu, aż
do zaawansowanych, jak nadzór linii harmonicznych. Łożyska toczne nadzorowane są za
pomocą techniki wyznaczania obwiedni sygnału, która pozwala na wykrycie zużycia
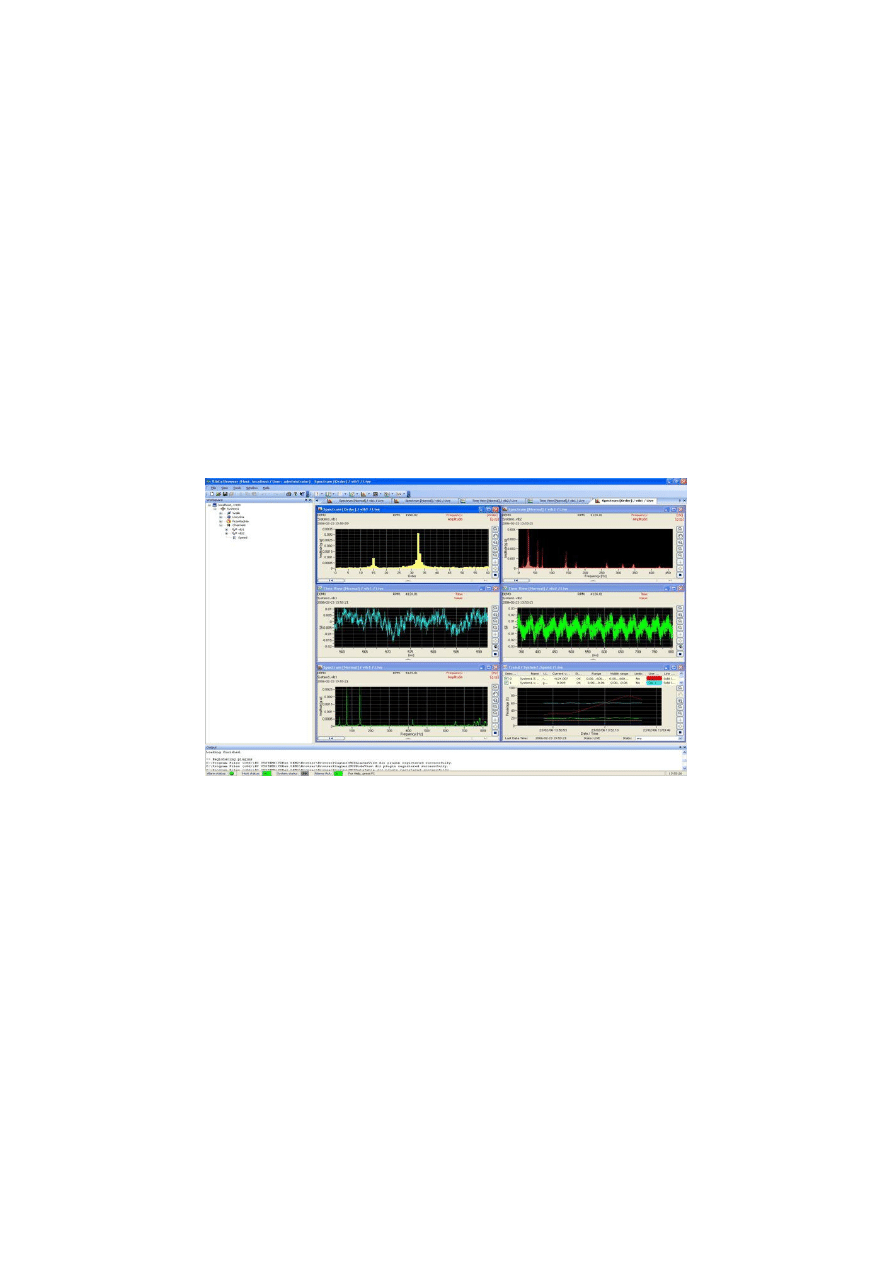
elementu dużo szybciej niż algorytmy oparte na klasycznym widmie sygnału. Na rys. 4.12
przedstawiono okno systemu „Vibex” w trakcie analizy pracy przekładni zębatej.
Rys. 4.12. System „Vibex” w trakcie badań stanowiskowych [34]
System „VIBex” automatycznie tworzy progi alarmowe dla wszystkich nadzorowanych
wielkości, co pozwala na zaoszczędzenie wielu godzin pracy nad konfiguracją systemu
pomiarowego. W skład systemu wchodzi także narzędzie do automatycznego wyznaczania
wartości progów(ostrzeżeń i alarmów). Progi te mogą być definiowane osobno dla kilku
stanów maszyny. Po skonfigurowaniu i uruchomieniu systemu, można obserwować stan
maszyn dzięki wielu wygodnym i funkcjonalnym wykresom. Stan systemu jest natychmiast
widoczny na pasku statusu (kolorowe diody). Wszystkie wykryte przekroczenia są
przedstawione na drzewie po lewej stronie ekranu i są propagowane przez drzewo aż do
kanału, który był źródłem alarmu 34.
„VIBex” jest systemem bardzo wygodnym w obsłudze. Możliwe jest otwieranie wykresu
poprzez tylko jedno klikniecie myszką, przeskakiwanie między wykresami lub eksport
danych z wykresu do raportu (np. do pliku MS Word albo do pliku graficznego). Podczas
analizy widma sygnału możliwe jest nałożenie na wykres widma odniesienia (zapisanego w
znanych warunkach poprawnej pracy maszyny). Możliwa jest zmiana jednostek, typu widma
oraz jego kolorów. Możliwe jest również nanoszenie na wykres linii odpowiadających
harmonicznym częstotliwości pochodzących od wybranych elementów maszyny oraz
wyszukanie harmonicznych, które mogą być przyczyną wybranej linii na widmie.
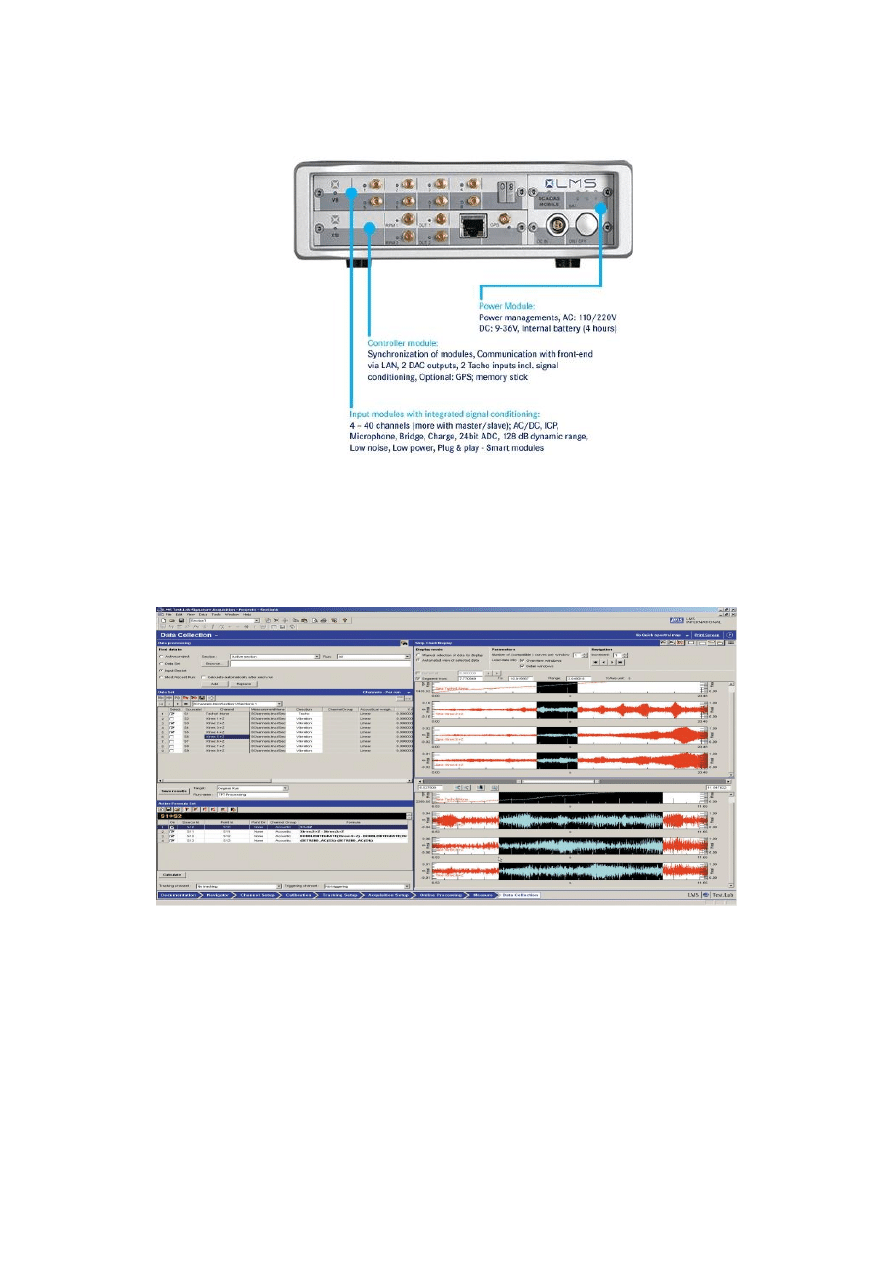
Przykładowe wyniki graficznej analizy danych pomiarowych przedstawiono na rysunku 4.13.
Rys. 4.13. Okno graficznej analizy danych pomiarowych systemu „Vibex” [34]
VIBex posiada wiele innych funkcji, składających się na zaawansowane, ale proste w
użyciu narzędzie do monitorowania i diagnostyki maszyn. VIBex został opracowany przez
firmę EC Systems, EC Grupa we współpracy z AGH w Krakowie [34].
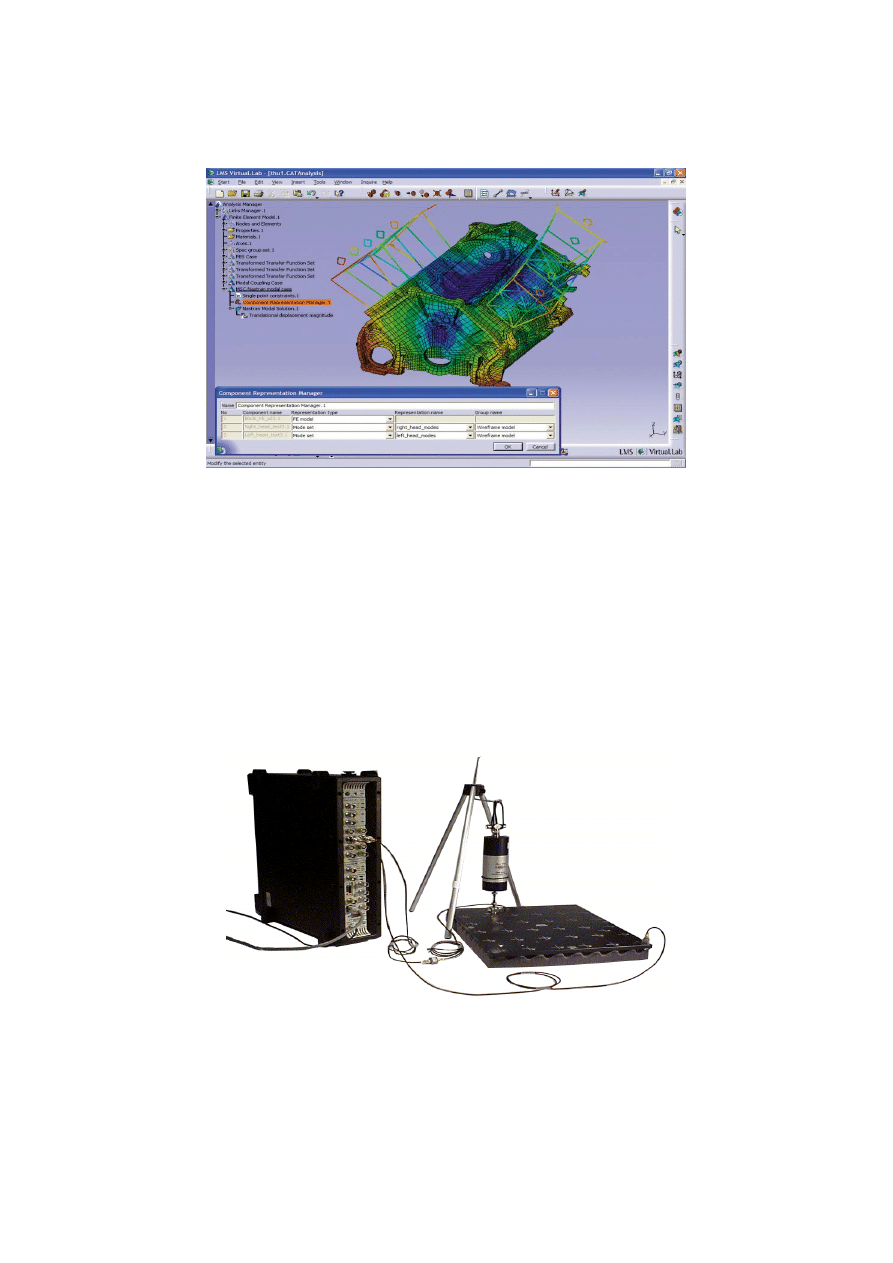
Do jednych z najbardziej zaawansowanych systemów pomiarowych stosowanych w
badaniach diagnostycznych można zaliczyć system LMS SCADAS Recorder. LMS SCADAS
Recorder to urządzenie łączące cechy analizatora i klasycznego rejestratora. Na rysunku 4.14
przedstawiono płytę czołową systemu LMS SCADAS [35].
Uniwersalność zastosowania tego rodzaju systemu pomiarowego wyróżnia się tym, że w
zależności od specyfiki przeprowadzanych badań diagnostycznych użytkownik sam
konfiguruje urządzenie w niezbędny zestaw kart pomiarowych z odpowiednią ilością kanałów
pomiarowych. W odróżnieniu od klasycznych rejestratorów LMS SCADAS Recorder jest w
pełni zautomatyzowany i nie potrzebuje sterowania poprzez komputer lub sterowania
zdalnego do przeprowadzenia procesu rejestracji sygnałów pomiarowych. Dane bezpieczne
zapisywane są na karcie CompactFlash. Urządzenie to jest całkowicie kompatybilne z
profesjonalnym oprogramowaniem inżynierskim. Dopiero połączenie rekordera oraz
oprogramowania do analizy danych w pełni pokazuje możliwości zastosowania tego systemu
w praktyce inżynierskiej. Na uwagę zasługuje tutaj oprogramowanie LMS Test.Lab [35].
Rys. 4.14. LMS SCADAS Recorder [35]
LMS Test.Lab to kompletny system oferujący wszystko co jest potrzebne do
prowadzenia pomiarów, akwizycji danych, ich analizy i opracowywania raportów. System
zawiera procedury dedykowane do testów strukturalnych i akustycznych, testów
środowiskowych i kontroli drgań oraz testów maszyn wirujących. Okno dialogowe
oprogramowania przedstawione zostało na rysunku 4.15 [35].
Rys. 4.15. Okno dialogowe programu LMS Test.Lab [35]
LMS Test.Lab używany jest do wstępnego dostarczenia danych zebranych na
rzeczywistych obiektach i wkomponowania ich w proces symulacji. Może zostać użyty do
dostarczenia oprogramowaniu symulacyjnemu danych na temat modeli zależnych, które są
zbyt trudne do realizacji lub ich stworzenie zajęłoby zbyt wiele czasu. Po przetestowanie
stworzonego na bazie symulacji prototypu możemy przeprowadzić jego testy, a LMS
Test.Lab dostarczy nam danych do jego modyfikacji i poprawy. Jedyną drogą prowadzącą do
uzyskania najlepszych rezultatów jest kombinacja symulacji i testów na rzeczywistych
obiektach, które na bazie nich powstały [35].
Dopełnieniem systemu pomiarowego jest system LMS Virtual.Lab, który pozwala na
połączenie najważniejszych aspektów symulacji i testów na istniejących obiektach. Oferuje
unikatowe, hybrydowe podejście do symulacji – dane wejściowe pochodzące z rzeczywistych
obiektów łączone są z danymi z obiektów symulowanych. Okno dialogowe systemu
przedstawione zostało na rysunku 4.16.
Rys. 4.16. Okno dialogowe oprogramowania LMS Virtual.Lab [35]
LMS Virtual.Lab to zintegrowane środowisko pozwalające na symulowanie zachowania
systemów mechanicznych w zakresie integralności strukturalnej, drgań i hałasu, trwałości,
dynamiki, zachowania w czasie jazdy i przemieszczenia oraz innych atrybutów [35].
Rozwiązaniem konkurencyjnym na rynku zaawansowanych narzędzi do akwizycji i
analizy sygnałów jest system wielokanałowej rejestracji i analizy sygnałów
wibroakustycznych PULSE firmy Brüel & Kjær. Unikalność na skalę światową tego
urządzenia wynika z nowatorskich rozwiązań firmy Brüel & Kjær w zakresie akwizycji
sygnału drgań i hałasu. Zastosowana nowoczesna technologia procesora sygnałowego
pozwoliła uzyskać dynamikę pomiaru przekraczającą 160dB, co oznacza możliwość
jednoczesnego rejestrowania drgań sejsmicznych aż po hałas startującego samolotu
odrzutowego, czy detonacji ładunków wybuchowych. Analizator wraz ze wzbudnikiem drgań
przedstawiono na rysunku 4.17.
Rys. 4.17. Wielokanałowy system PULSE ze wzbudnikiem drgań [38]
Środowisko analizatora PULSE pozwala na kompleksową analizę klimatu akustycznego
oraz drgań mechanicznych. System wyposażony jest w pakiet specjalistycznego
oprogramowania do analizy modalnej maszyn i urządzeń. Przykładowe okno tworzenia
geometrii w trakcie analizy modalnej przedstawiono na rysunku 4.18.
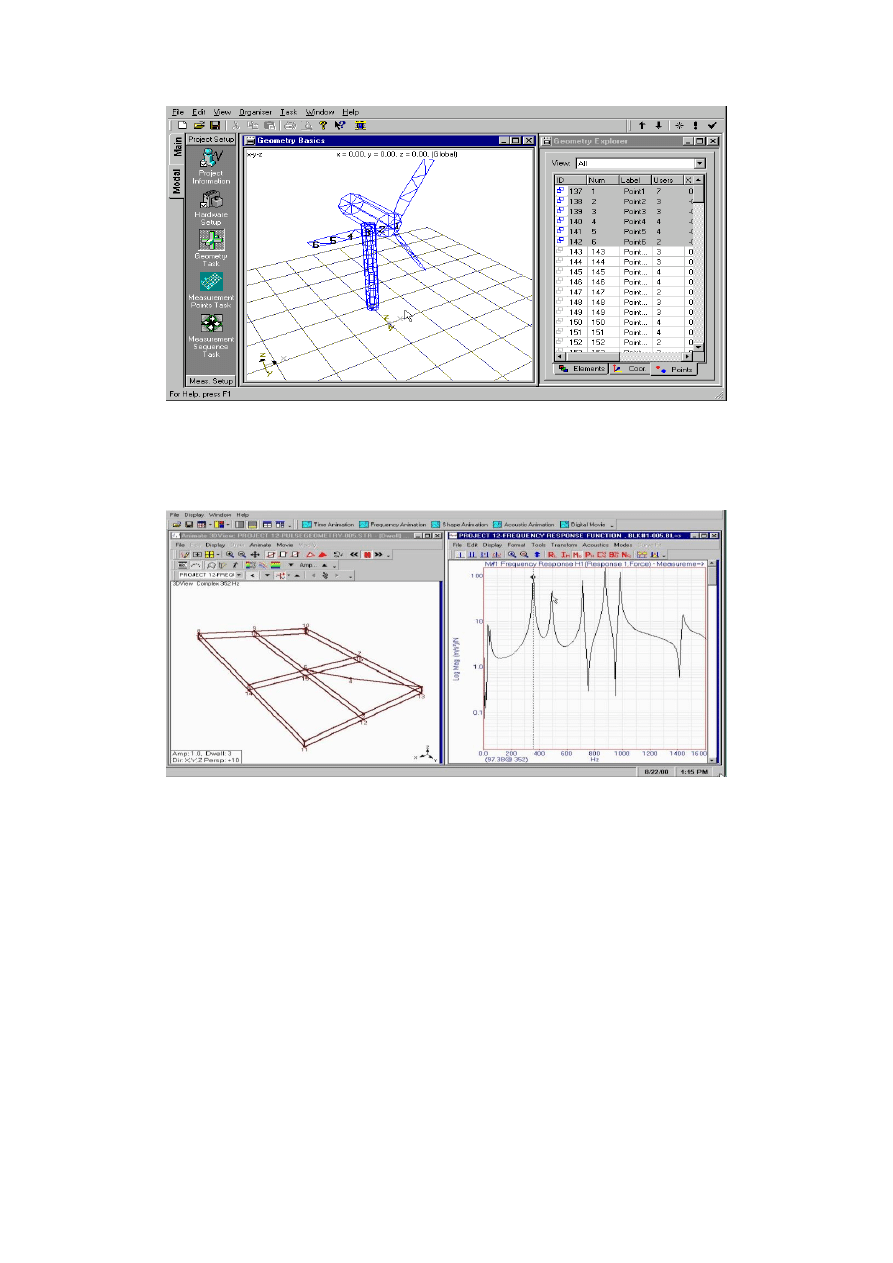
Rys. 4.18. Okno modułu tworzenia geometrii badanego obiektu w systemie PULSE
Jako wynik w procesie analizy modalnej w systemie PULSE uzyskujemy zintegrowane
okno danych pomiarowych, moduł geometrii z postaciami drgań własnych dla
zidentyfikowanych częstości modalnych oraz inne dane, które przedstawiono na rys. 4.19.
Rys. 4.19. Okno modułu wyników analizy modalnej w systemie PULSE
System PULSE jest z powodzeniem wykorzystywany w diagnostyce maszyn i urządzeń
oraz środków transportu i środowiska naturalnego, a także pomiarów normatywnych i
certyfikacji wyrobów ze względu na generowany hałas i drgania.
PODSUMOWANIE
W rozdziale czwartym przedstawiona została problematyka prawidłowego
przygotowania i przeprowadzenia testów diagnostycznych obiektów rzeczywistych. Właściwe
przygotowanie do badań i przemyślenie wszystkich aspektów prowadzenia eksperymentu
eliminuje błędy, skraca czas pomiarów i analizy wyników oraz wpływa na jakość stawianej
diagnozy.
W rozdziale tym ponadto przedstawiono wybrane systemy diagnostyczne, stanowiące
jedne z najnowszych narzędzi w rękach inżynierów niezbędne do badań nowoczesnych
konstrukcji maszyn i obiektów technicznych.
Wyszukiwarka
Podobne podstrony:
Czujniki do pomiaru drgań RS
Narzedzia sluzace do pomiaru mikroklimatu
nowaczewski,Podstawy Metrologii i Technik Eksperymentu L, system do pomiaru strumienia objętości wod
MOSTKI2, MOSTKI PRĄDU STAŁEGO:- grupa narzędzi pomiarowych przeznaczonych do pomiaru rezystancji
Wykład V Podejście systemowe do budowy strategii
CZUJKI DYMU WYKORZYSTUJĄCE ŚWIATŁO ROZPROSZONE DO POMIARU GĘSTOŚCI OPTYCZNEJ DYMU
Lab-diagnostyka-sem8-Pomiar drgan, Księgozbiór, Studia, Diagnostyka
Dobieranie materiałów, narzędzi i sprzętu do robót okładzinowych
Przenoszenie plików systemowych do pamięci operacyjnej
Do pomiaru trzęsień ziemi stosujemy dwie różne skale
Narzędzie tnące i do wytłaczania
Obsługiwanie aparatury do pomiarów geofizycznych
do pomiarów2
213 URZĄDZENIE DO POMIARU MOMENTU OBROTOWEGO UPM 100M
Komputerowy system do?dań?ektywności metaheurystyki ''System Mrówek'' w zakresie optymalizacji dyskr
Zastosowanie fotokomórki do pomiarów fotometrycznych, Politechnika Krakowska
przyrządy do pomiaru wilgotności gleby
więcej podobnych podstron