Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
1
2.
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
W metodzie sił w celu przyjęcia układu podstawowego należało odrzucić więzy nadliczbowe. O liczbie
odrzuconych więzów decydował stopień statycznej niewyznaczalności (
SSN). W metodzie przemieszczeń
układ podstawowy uzyskamy dokładając więzy (przesztywniając konstrukcję). O liczbie więzów które trzeba
dołożyć decyduje stopień kinematycznej niewyznaczalności (
SKN). Jest on sumą wszystkich możliwych
niezależnych kątów obrotu węzłów i niezależnych przesuwów.
2.1. Niezależne kąty obrotu węzłów
Przy określaniu
SKN należy najpierw określić liczbę węzłów wewnętrznych układu prętowego, w
których zbiegają się sprężyście przynajmniej dwa utwierdzone pręty.
Należy zwrócić uwagę, że jeżeli na długości pręta zmienia się sztywność to połączenie elementów o
różnych sztywnościach traktujemy jak dodatkowy węzeł wewnętrzny.
EJ
1
EJ
2
Drugim etapem jest określenie liczby więzów, które należy wprowadzić tak aby układ był
nieprzesuwny. Sposób określania
SKN zilustrujemy na kilku przykładach.
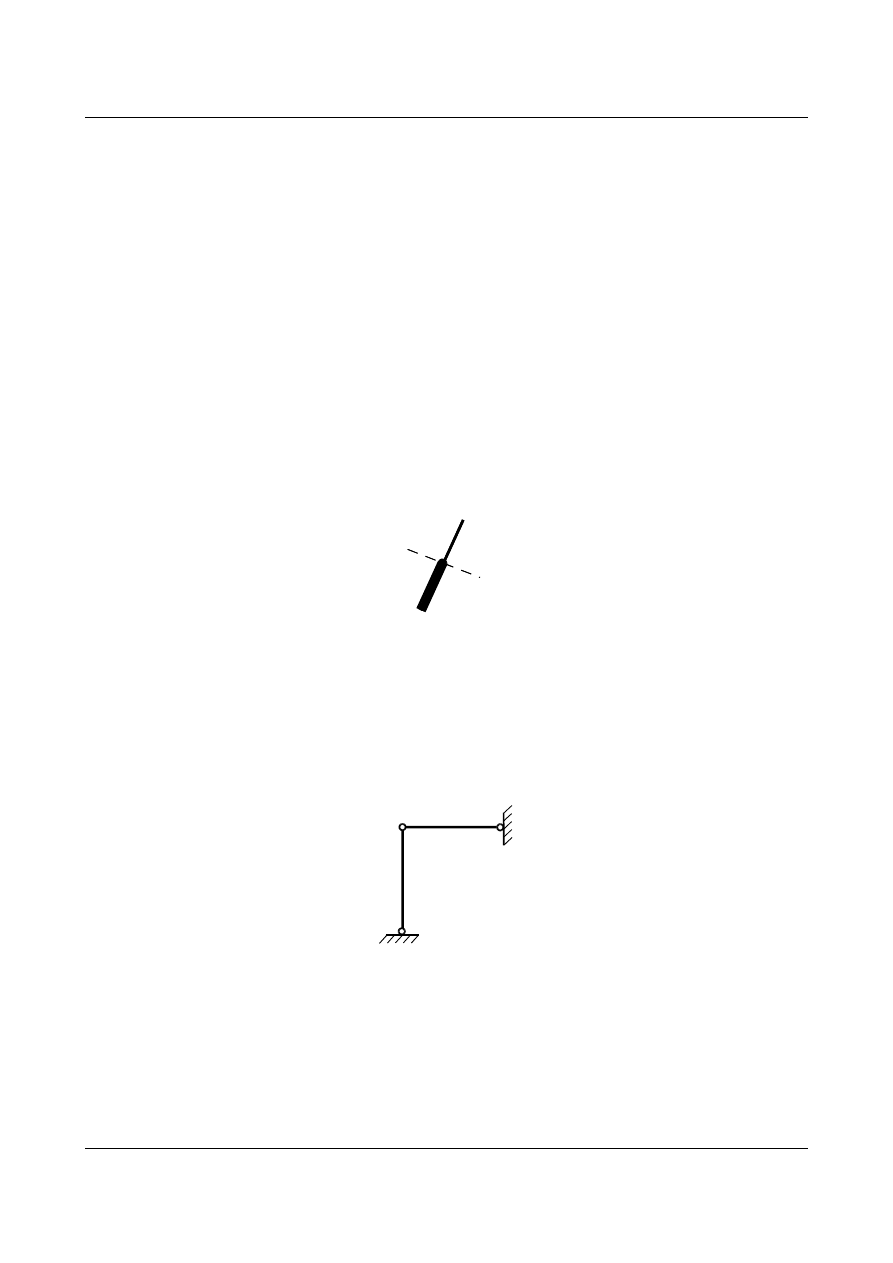
Przykład 1
Dla ramy przedstawionej na rys. 2.1 określić
SSN, SKN oraz dobrać układy podstawowe metody
przemieszczeń.
Rys. 2.1. Rama płaska
Rama jest statycznie i kinematycznie wyznaczalna zatem
SSN
=0
SKN
=0
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
2
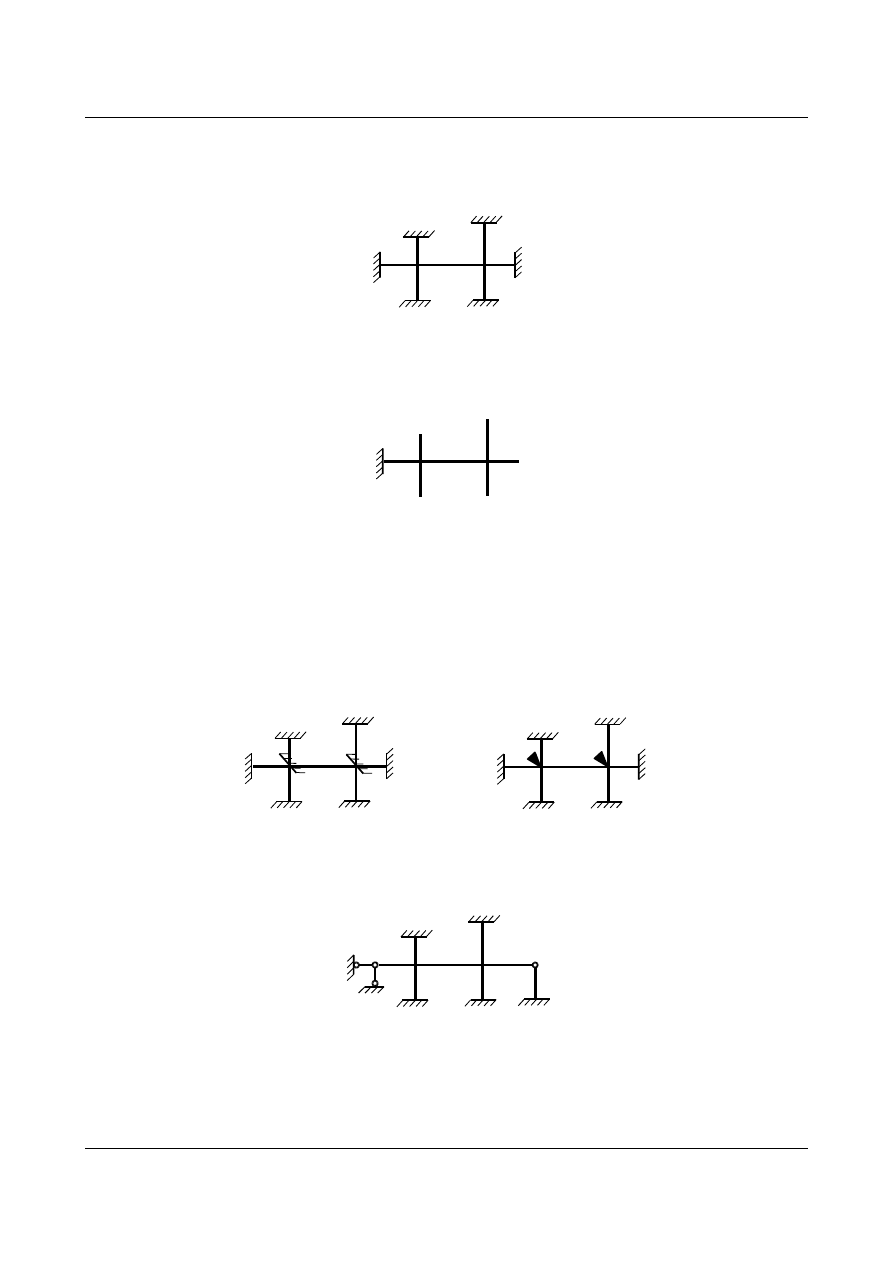
Przykład 2
Dla ramy przedstawionej na rys. 2.2 określić
SSN, SKN.
Rys. 2.2. Zadana rama
Stopień statycznej niewyznaczalności określamy na podstawie liczby więzów, które należy usunąć aby przyjąć
układ podstawowy metody sił:
Ponieważ odrzucono pięć podpór sztywnych stopień statycznej niewyznaczalności wynosi:
SSN
=5 ⋅3 =15
W celu określenia układu podstawowego metody przemieszczeń zablokowano dwa możliwe obroty węzłów
przez dodanie do układu dwóch utwierdzeń wewnętrznych. Wobec tego stopień statycznej niewyznaczalności
wynosi:
SKN
=2
lub przy innych
oznaczeniach:
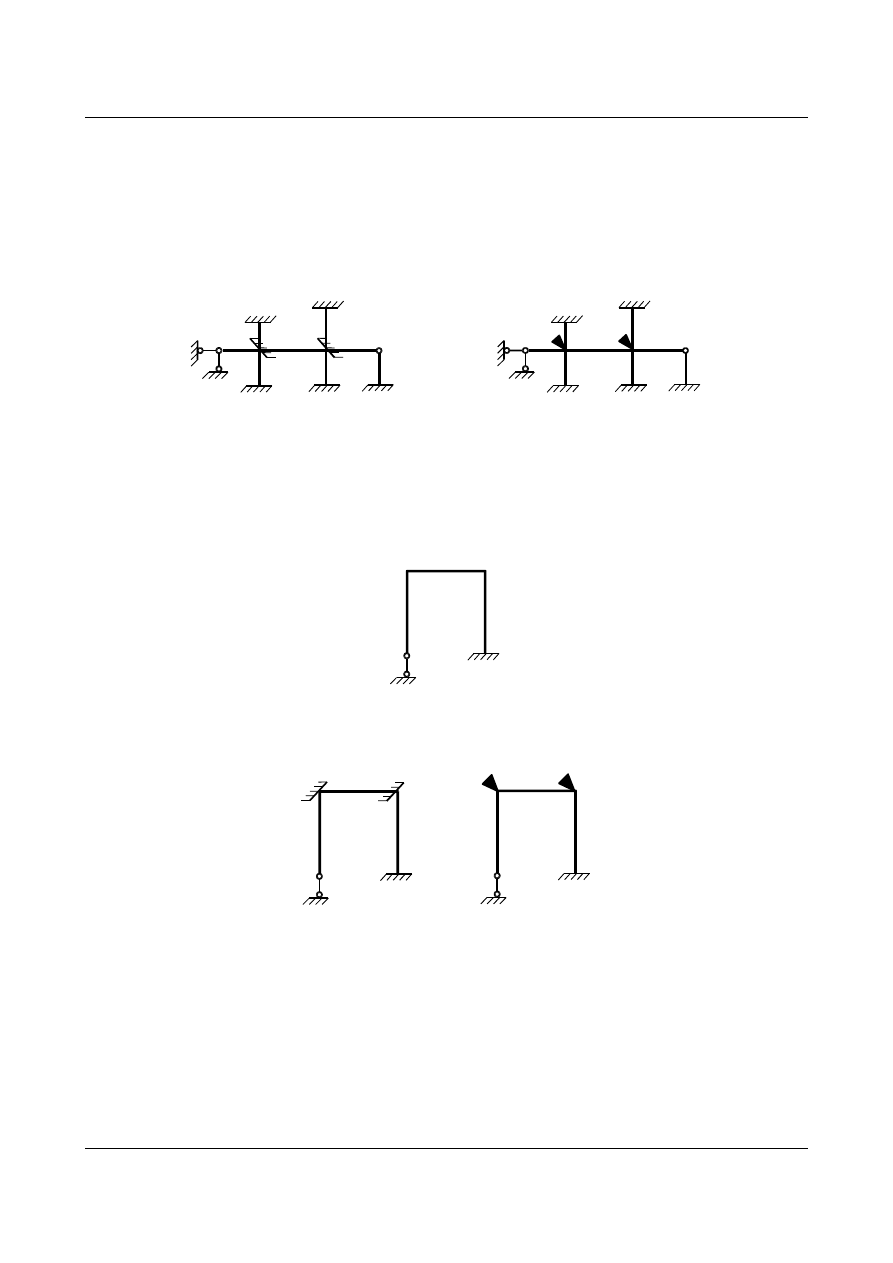
Przykład 3
Określić
SSN, SKN dla ramy przedstawionej na rys. 2.3.
Rys. 2.3. Rama niewyznaczalna
Dla ramy (rys. 2.3) określono stopień statycznej niewyznaczalności usztywniając przeguby (
p=2) i odrzucając
utwierdzenia (
r=5):
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
3
SSN
=5 ⋅3 −2 =13
Natomiast układ podstawowy metody przemieszczeń uzyskamy blokując dwa możliwe obroty węzłów przez
dodanie do układu dwóch “utwierdzeń” (więzów, które odbierają tylko możliwość obrotu, ale pozwalają na
swobodny przesuw):
SKN
=2
lub przy innych
oznaczeniach:
Dotychczas analizowaliśmy tak zwane układy “nieprzesuwne”, w kolejnych przykładach
rozpatrzymy układy “przesuwne”, takie w których po zablokowaniu obrotów możliwe są przemieszczenia
liniowe.
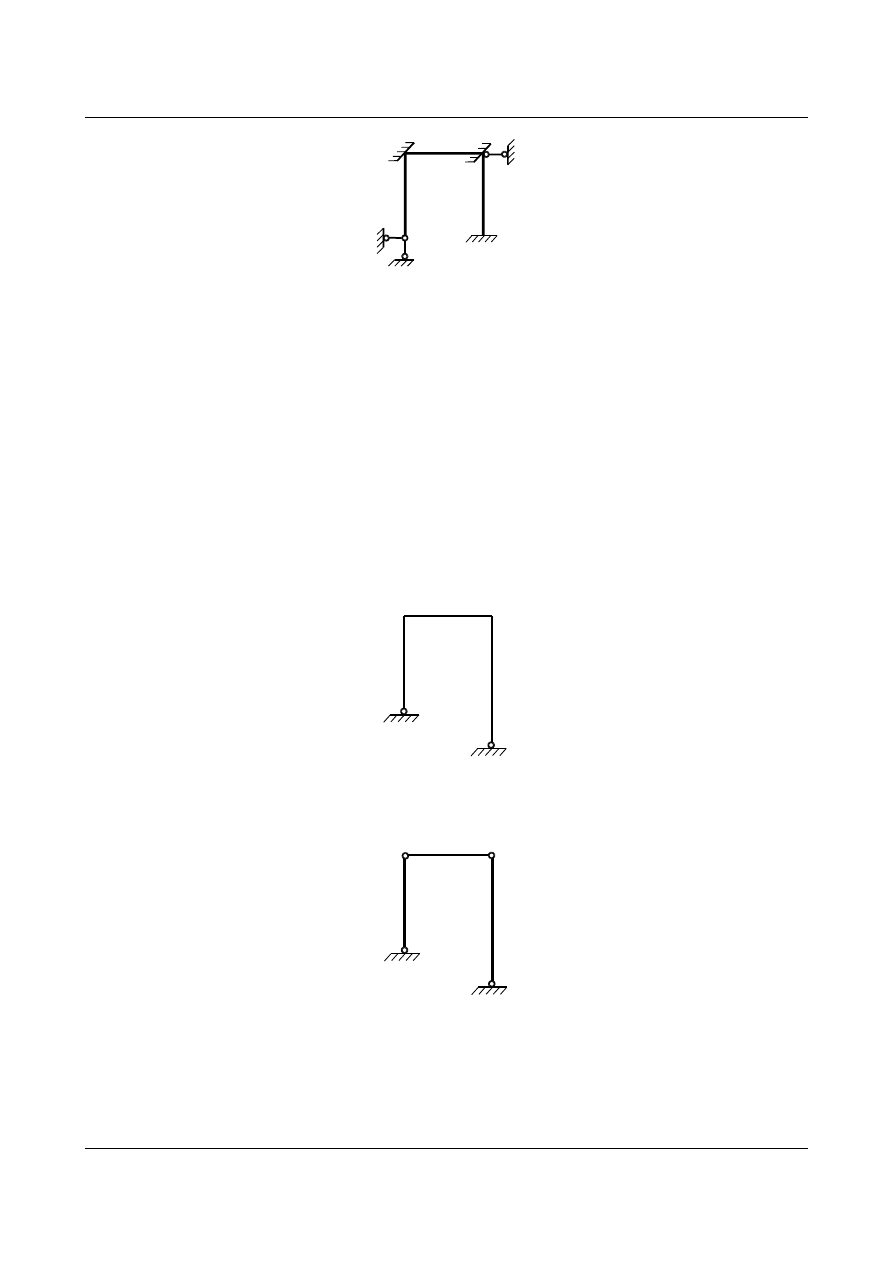
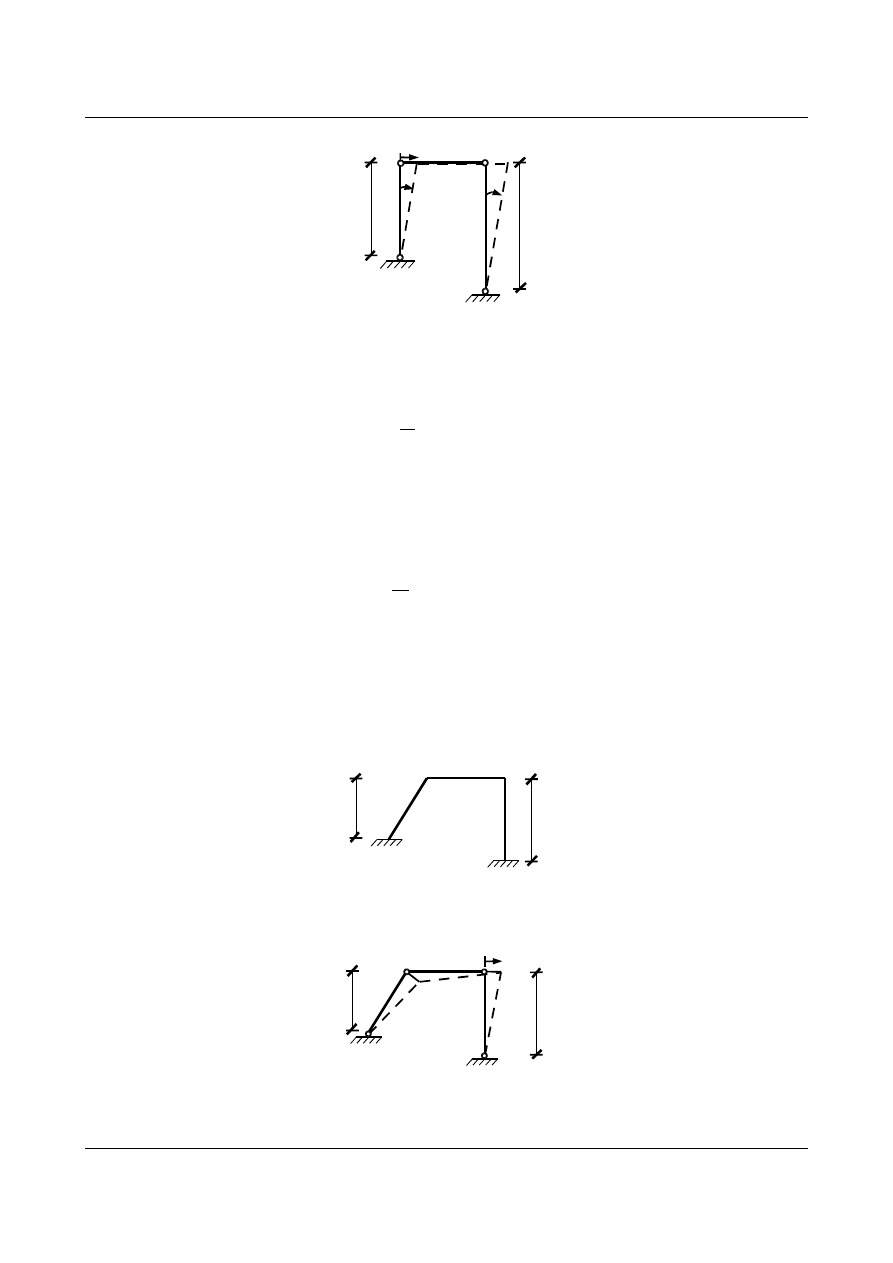
Przykład 4
Analizując ramę podaną na rysunku 2.4
Rys. 2.4. Zadana rama
w pierwszym etapie blokujemy obroty węzłów:
lub:
Drugim etapem w przyjęciu układu podstawowego jest zablokowanie możliwych przesuwów węzłów.
Ponieważ zakładamy, że pręty nie ulegają skróceniu lub wydłużeniu to wstawienie więzu po kierunku osi rygla
uniemożliwia poziome przesuwy obydwu górnych więzów. Słupy mają dolne węzły przytrzymane w pionie,
wobec tego górne węzły też nie mogą się przesuwać pionowo. Drugim możliwym przesuwem jest poziome
przemieszczenie podpory lewej.
Ostatecznie układ podstawowy został zbudowany przez wprowadzenie
4 więzów.
SKN
=4
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
4
Dla tej samej ramy (rys. 2.4) określono stopień statycznej niewyznaczalności:
SSN
=1
2.2. Łańcuch kinematyczny
W złożonych układach prętowych liniowe przemieszczenia węzłów często są ze sobą powiązane.
Aby określić stopień kinematycznej niewyznaczalności trzeba ustalić liczbę niezależnych przesuwów.
Aby wyznaczyć liczbę niezależnych przesuwów należy utworzyć dla danego układu, poprzez
wprowadzenie we wszystkich węzłach przegubów, tak zwany łańcuch kinematyczny.
Przykład 5
Utworzyć łańcuch kinematyczny dla ramy przedstawionej na rys. 2.5.
Rys. 2.5. Rama płaska
Najpierw we wszystkich węzłach wstawiamy przeguby:
Następnie do łańcucha kinematycznego wprowadzamy przesuw (
Δ) i uzależniamy od niego kąty obrotu cięciw
prętów (
ψ
i
), jak na rys. 2.6.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
5
h
1
h
2
Δ
Ψ
1
Ψ
3
Ψ
2
Rys. 2.6. Łańcuch kinematyczny z wprowadzonym przesuwem Δ
Przyjmując, że pręty nie ulegają skróceniu, oraz że dla małych kątów tg
≈ , dla powyższego układu
możemy zapisać:
1
=
h
1
=
2
=0
Ponieważ cały rygiel przesuwa się w poziomie to:
1
⋅h
1
=
3
⋅h
2
⋅h
1
=
3
⋅h
2
3
=
h
1
h
2
⋅
Obroty cięciw wszystkich prętów zostały wyrażone przez jedną niewiadomą. Wobec tego w ramie jest jeden
niezależny przesuw.
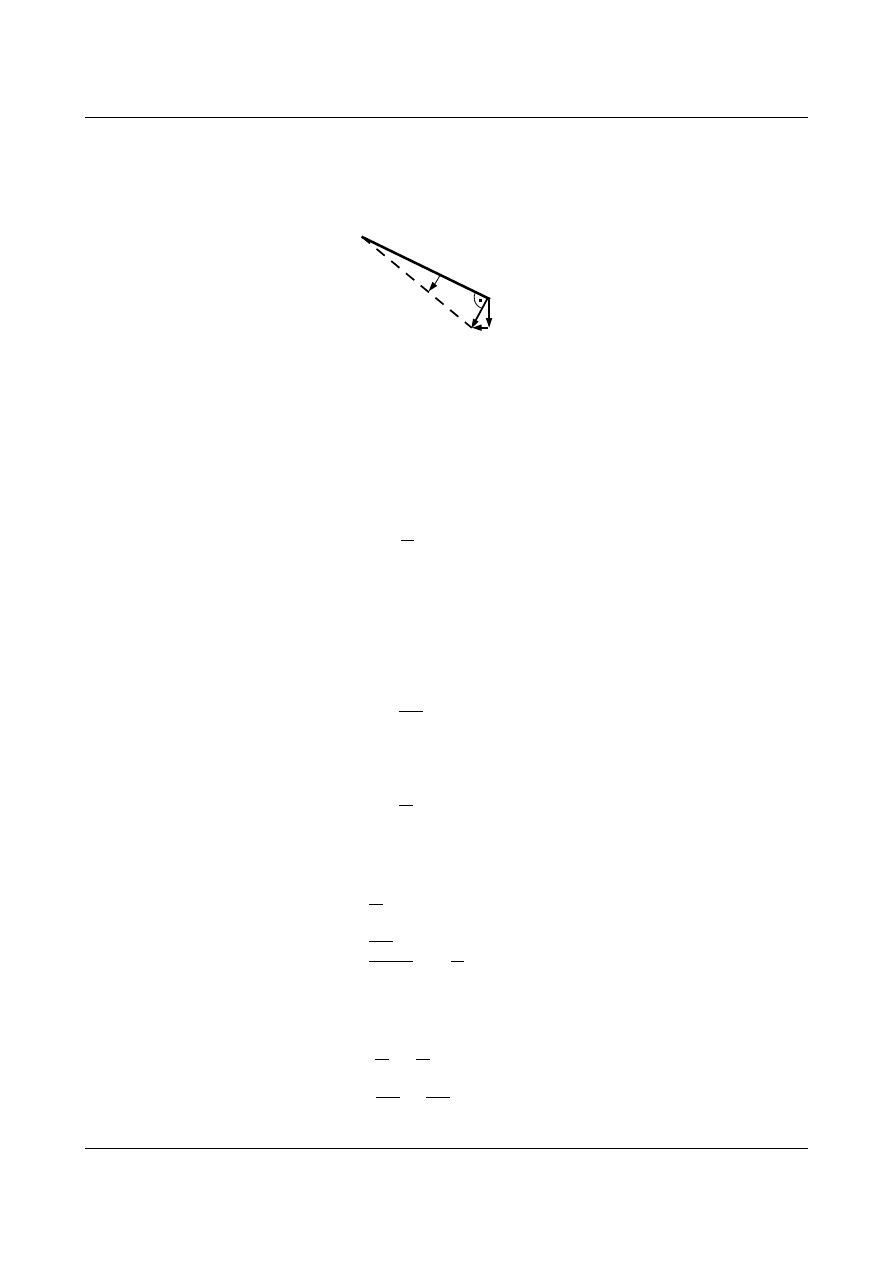
Przykład 6
Innym przykładem może być rama ze słupem skośnym:
h
1
h
2
Wprowadzamy we wszystkich prętach przeguby i narzucamy przesuw jednego z węzłów (nie podpory) w
poziomie (rys. 2.7)
h
1
h
2
Δ
Ψ
3
Ψ
1
Ψ
2
Rys. 2.7. Łańcuch kinematyczny z wprowadzonym przesuwem Δ
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
6
W tym przypadku stwierdzamy, że:
3
=
h
2
oraz na podstawie wcześniejszego przykładu określamy
1
=
h
1
Natomiast do wyznaczenia kąta obrotu rygla potrzebna jest szczegółowa analiza układu wieloprętowego.
W przypadku układów wieloprętowych występuje kilka wartości kątów obrotu prętów
ψ
i
, które nie są
niezależne, lecz związane ze sobą równaniami łańcucha kinematycznego. Łańcuch taki podobnie jak dla
układów o niewielkiej liczbie prętów, tworzymy przez wprowadzenie przegubów w miejscach węzłów:
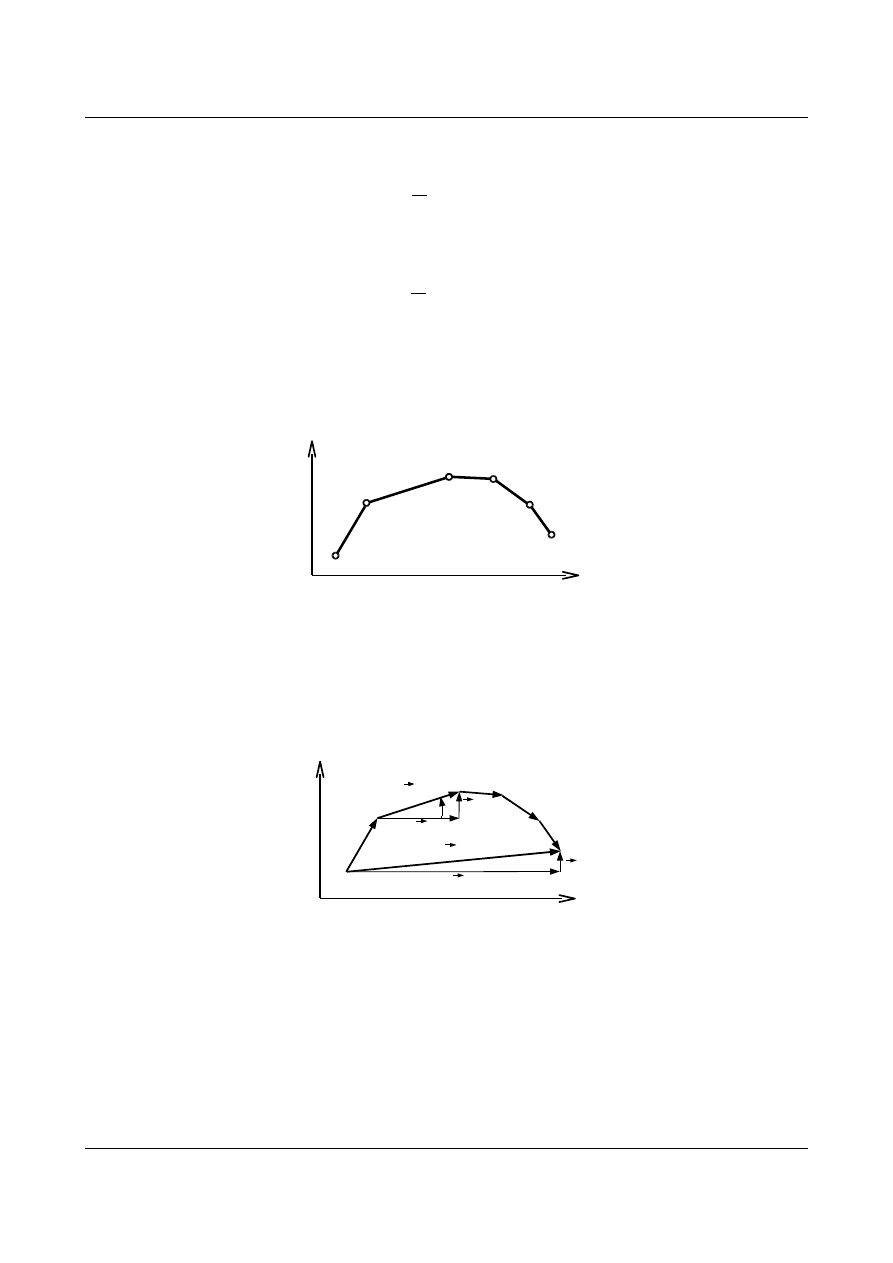
y
x
0
n
Rys. 2.8. Łańcuch kinematyczny dowolnego układu wieloprętowego
Układ prętów należy zamienić na układ wektorów (rys.2.9) którego wypadkowa łączy węzeł początkowy z
końcowym:
W
=
∑
i
=1
n
l
i
y
x
0
n
l
i
α
i
l
i
x
l
i
y
W
W
y
W
x
Rys. 2.9. Układ prętów zamieniony na układ wektorów
Wówczas składowe wypadkowej możemy zapisać jako sumy:
∑
i
l
i
x
=
W
x
∑
i
l
i
y
=
W
y
Ponieważ znany jest kąt nachylenia każdego z prętów w konstrukcji
i
, prawdziwe są zależności:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
7
l
i
x
=l
i
cos
i
l
i
y
=l
i
sin
i
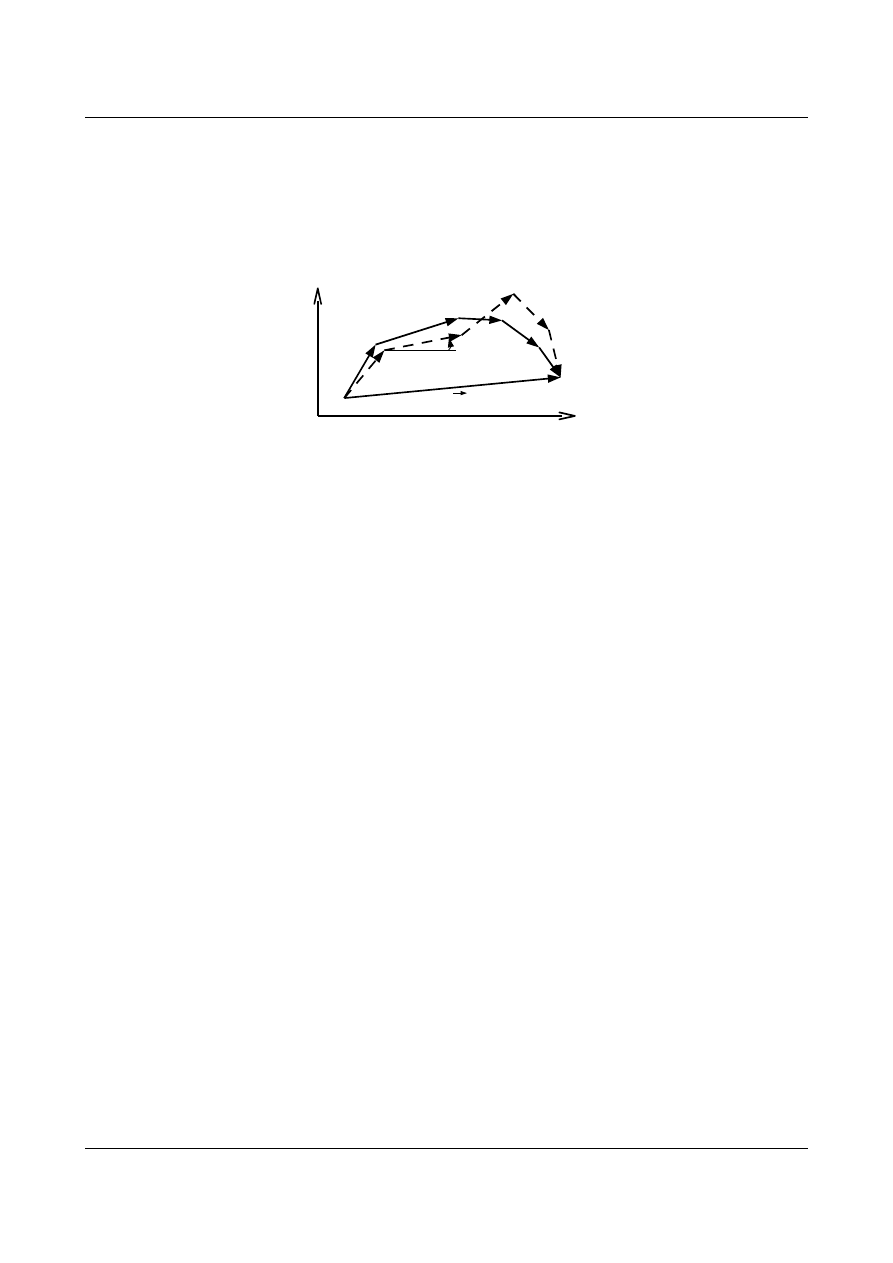
Po tych wstępnych założeniach należy poddać analizie układ, który doznał przemieszczeń. Zajmować się
będziemy przemieszczeniami kinematycznie dopuszczalnymi (łańcuch nie może się rozerwać) przy założeniu,
że węzeł początkowy i końcowy nie ulegają przemieszczeniom.
y
x
0
n
α'
i
W
Po wewnętrznej deformacji długości wektorów zostały niezmienione (założyliśmy nieskracalność prętów).
Nowe pochylenie pręta
l
i
jest sumą kąta pierwotnego położenia
α
i
i kąta obrotu
ψ
i
:
i
'
=
i
−
i
We wzorze zapisaliśmy kąt
i
ze znakiem ujemnym, ponieważ kąty
i
uznajemy za dodatnie skierowane od
osi
x do y (układ prawoskrętny), natomiast kąty
i
są dodatnie gdy kręcą od osi
y do x (zgodnie z ruchem
wskazówek zegara).
Po przemieszczeniach składowe wypadkowej (która się nie zmieniła) opisują zależności:
∑
i
l
i
cos
i
'
=
W
x
∑
i
l
i
sin
i
'
=
W
y
Rozpisując pierwsze równanie otrzymamy:
∑
i
l
i
cos
i
−
i
=
W
x
∑
i
l
i
[cos
i
⋅cos
i
sin
i
⋅sin
i
]=
W
x
Dla bardzo małych kątów można zapisać :
cos
i
=1
sin
i
=
i
co daje:
∑
i
l
i
cos
i
∑
i
i
l
i
sin
i
=
W
x
Ponieważ składową wypadkowej przed przemieszczeniami znamy, to:
∑
i
l
i
cos
i
∑
i
i
l
i
sin
i
=
∑
l
i
cos
i
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
8
Po uporządkowaniu otrzymujemy:
∑
i
i
l
i
sin
i
=0
lub prościej:
∑
i
i
l
i
y
=0
Korzystając z drugiego równania możemy przeprowadzić podobną analizę:
∑
i
l
i
sin
i
−
i
=
W
y
∑
i
l
i
[ sin
i
⋅cos
i
−cos
i
⋅sin
i
]=
W
y
∑
i
l
i
sin
i
−
∑
i
i
l
i
cos
i
=
W
y
=
∑
i
l
i
sin
i
ostatecznie:
−
∑
i
i
l
i
cos
i
=0
∑
i
i
l
i
x
=0
W ten sposób otrzymaliśmy dwa równania łańcucha kinematycznego, które opisują związki między
wewnętrznie możliwymi obrotami prętów przy niezmienionym położeniu węzła początkowego i końcowego:
∑
i
i
l
i
y
=0
∑
i
i
l
i
x
=0
Równania te mogą być zapisane dla dowolnej liczby prętów pod warunkiem, że przemieszczenia skrajnych
węzłów
0 i n są równe zero (lub mają znaną wartość).
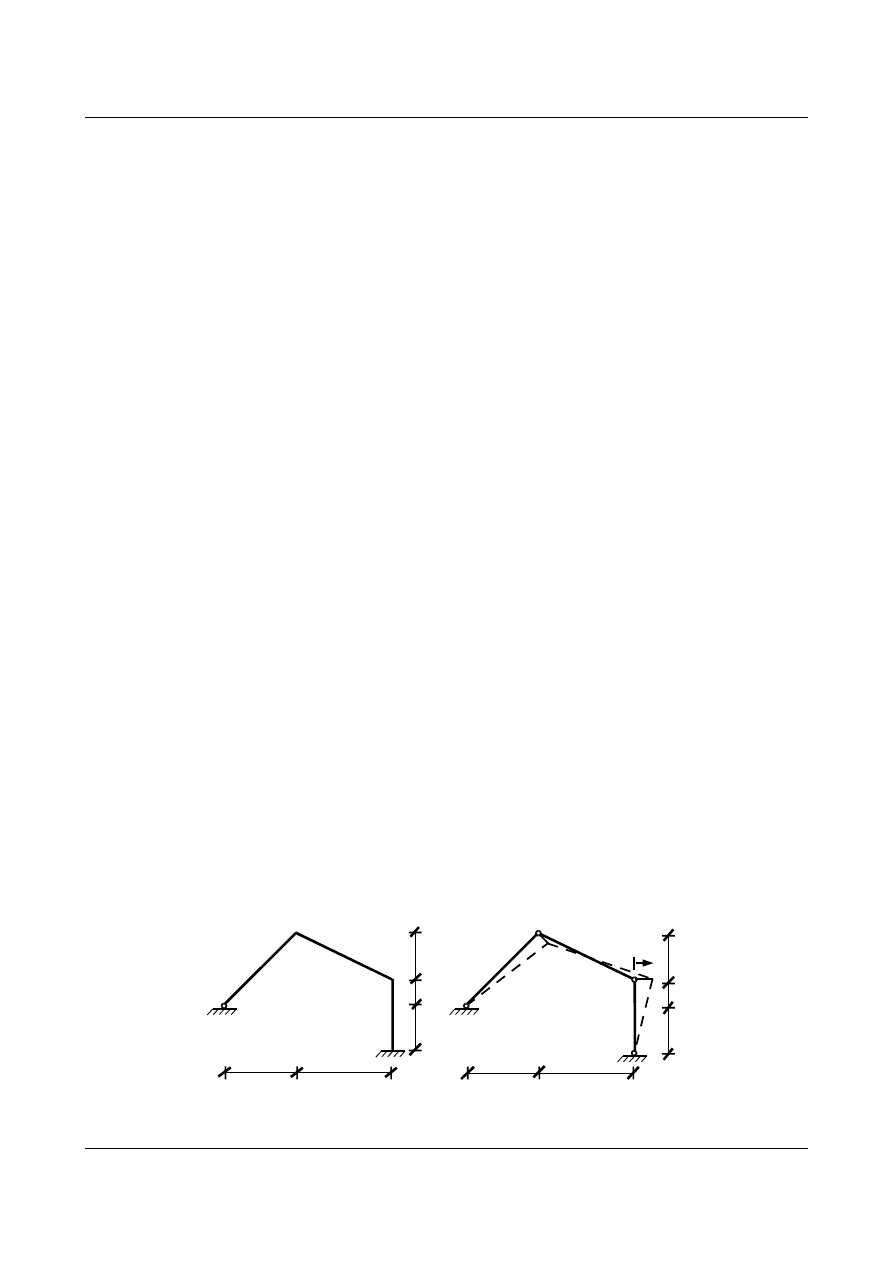
Przykład 7
Wyznaczyć kąty
obrotów prętów ramy spowodowane przesunięciem jednego z węzłów o wartość
(rys. 2.10).
1
2
2
4
3
1
2
2
4
3
Δ
Ψ
1
Ψ
3
Ψ
2
b)
a)
1
2
3
0
Rys. 2.10 a) Zadana rama, b) Łańcuch kinematyczny z wprowadzonym przesuwem Δ
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
9
Należy zwrócić uwagę, że sumujemy wektory przemieszczeń wewnętrznych przy założeniu dodatnich kątów
(zgodnie z ruchem wskazówek zegara). Dodatni obrót pręta
1-2 przytrzymanego w węźle 1 odbywa się w
dół. Wektor przemieszczenia węzła
2 jest skierowany w dół (ujemny w przyjętym układzie współrzędnych):
Ψ
12
1
2
Ψ
12
l
12
x
Ψ
12
l
12
y
Łańcuchy rozpisane od węzła
1 do 3 mają postać:
{
3
1
−2
2
−3
3
=0
−3
1
−4
2
0
3
=0
Obrót pręta
2-3 możemy wyznaczyć z tangensa kąta
3
=
3
=
lub układając równanie łańcucha od węzła
3 do węzła 2 w poziomie:
3
⋅3 =
z równania drugiego określamy:
2
=−
3
4
1
i wstawiamy do równania
1:
3
1
2 ⋅
3
4
1
=3
co prowadzi do wartości kątów obrotu:
{
1
=
2
3
2
=
−3
4
⋅2
3
=−
1
2
które mogą być wyrażone przez przemieszczenie
:
1
=
2
3
=
2
9
2
=−
1
2
=−
1
6
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
10
3
==
1
3
W przypadku bardzo rozbudowanych układów (rys. 2.11) można zapisać dwa równania łańcucha
kinematycznego dla różnych ścieżek zaczynających się w jednym węźle i zakończonych drugim węzłem.
Rys. 2.11. Przykładowa rozbudowana rama
1
1
2
2
2
2
2
2
0
1
2
3
4
5
6
7
8
9
10
11
12
Rys. 2.12. Łańcuch kinematyczny
Przykładowo mogą one mieć następujące postać:
∑
Y
1256
12
⋅0 −
25
⋅2
56
⋅0 =0
25
=0
∑
Y
123456
21
⋅0
23
⋅0 −
34
⋅2
45
⋅0
56
⋅0 =0
34
=0
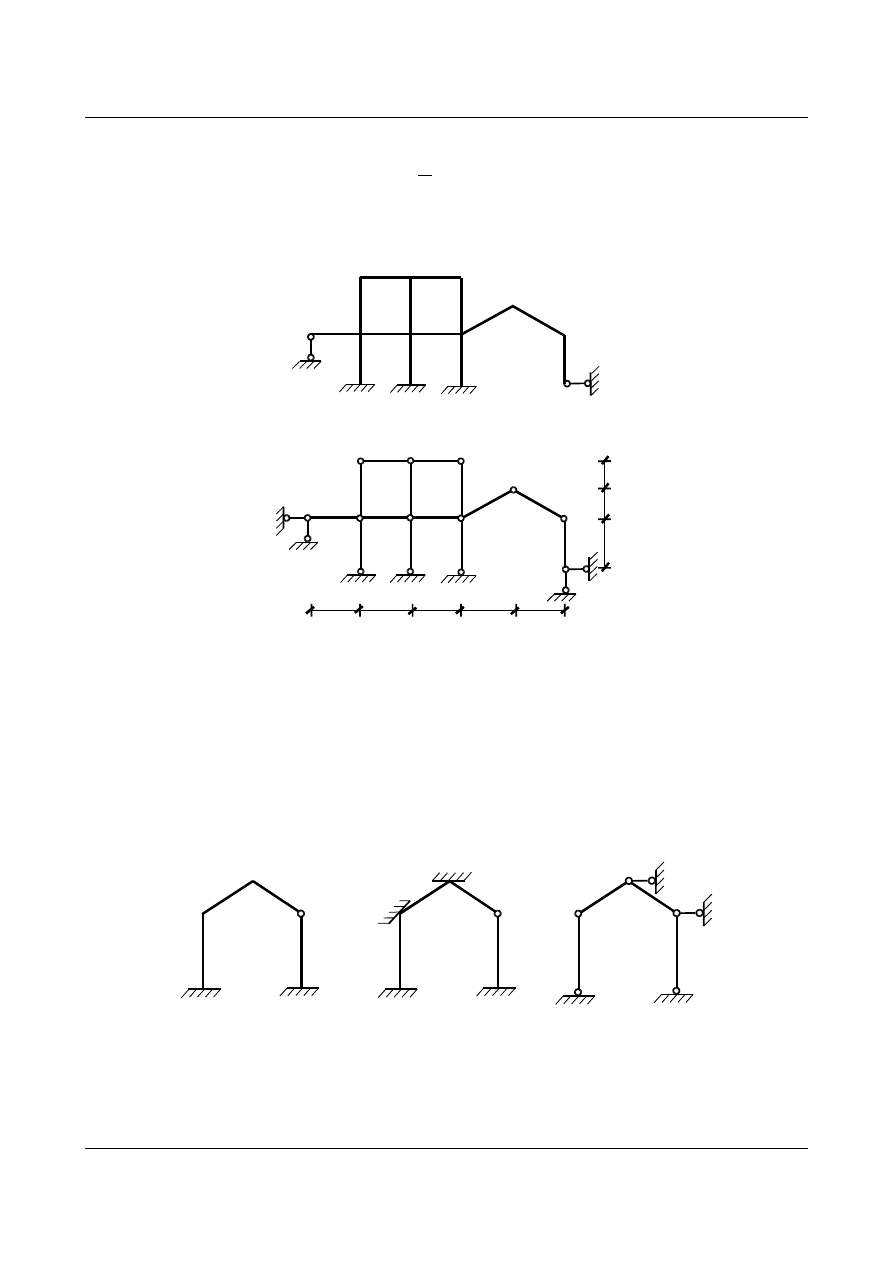
Przykład 8
Dla poniższych ram określić
SKN (liczbę kątów obrotu i przesuwów niezbędnych do zablokowania) układu.
c)
b)
a)
0
0
1
1
2
2
3
3
4
4
Rys. 2.13. a) Zadana rama, b) Zablokowane kąty obrotu, c) Zablokowane przesuwy
W ramie (rys. 2.13.a) w celu określenia stopnia kinematycznej niewyznaczalności zablokowano dwa możliwe
obroty węzłów przez dodanie do układu dwóch utwierdzeń wewnętrznych (rys. 2.13.b). Po zablokowaniu
przesuwu w węźle
3 część ramy 0123 mogłaby się przemieszczać, dlatego należało zablokować możliwość
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
11
przesuwu węzła
2.
SKN
=22=4
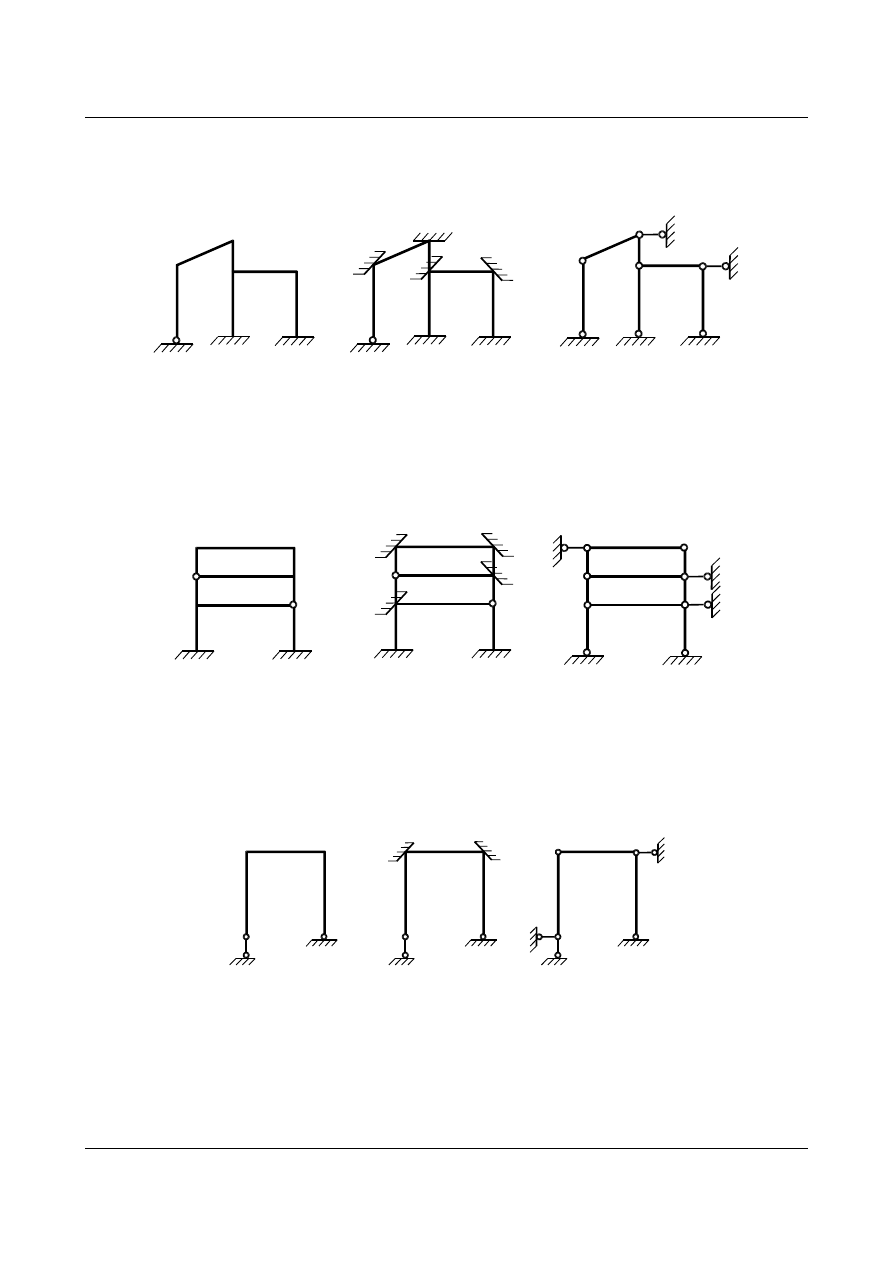
c)
b)
a)
Rys. 2.14. a) Zadana rama, b) Zablokowane kąty obrotu, c) Zablokowane przesuwy
W ramie z rys. 2.15.a najpierw zablokowano cztery możliwe obroty węzłów przez dodanie do układu czterech
utwierdzeń wewnętrznych (rys. 2.14.b) oraz dwa możliwe przesuwy przez dodanie do łańcucha
kinematycznego układu, dwóch podpór linowych (rys. 2.14.c):
SKN
=42=6
c)
b)
a)
Rys. 2.15. a) Zadana rama, b) Zablokowane kąty obrotu, c) Zablokowane przesuwy
Podobnie w ramie z rys. 2.15.a najpierw zablokowano cztery możliwe obroty węzłów przez dodanie do układu
czterech utwierdzeń wewnętrznych (rys. 2.15.b) a następnie odebrano możliwość przesuwu w każdym z pięter
ramy.
SKN
=43=7
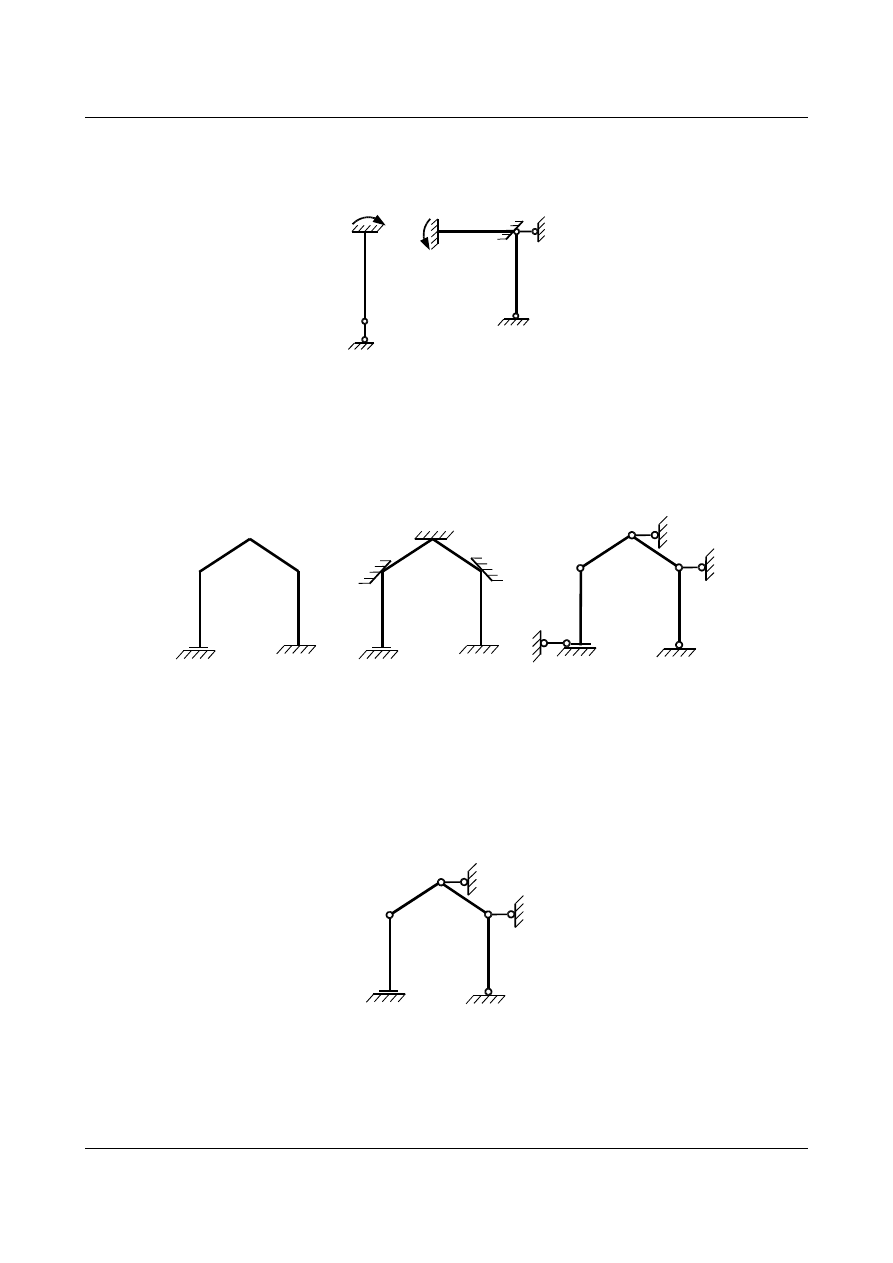
1
2
3
c)
b)
a)
Rys. 2.16. a) Zadana rama, b) Zablokowane kąty obrotu, c) Zablokowane przesuwy
W ramie (rys. 2.16.a) w celu określenia stopnia kinematycznej niewyznaczalności zablokowano obroty w
dwóch węzłach (rys. 2.16.b) i dodano dwie podpory liniowe (rys. 2.16.c):
SKN
=22=4
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
2. STOPIEŃ KINEMATYCZNEJ NIEWYZNACZALNOŚCI
12
Tę samą ramę można rozwiązać także w inny sposób. Pręt nr
1 z rys. 2.16.a można potraktować jak pręt
statycznie wyznaczalny, po czym pozostałą część układu obciążyć siłami węzłowymi (
M), pochodzącymi z
rozwiązania części wyznaczalnej (rys. 2.17).
1
M
2
3
M
Rys. 2.17. Rama podzielona na część statycznie wyznaczalną i niewyznaczalną
Wówczas
SKN zmniejszy się o jedną podporę liniową:
SKN
=21=3
Także ramę z podporą ślizgową można rozwiązywać dwoma metodami.
1
2
3
4
c)
b)
a)
Rys. 2.18. a) Zadana rama, b) Zablokowane kąty obrotu, c) Zablokowane przesuwy
W ramie (rys. 2.18.a) w celu określenia stopnia kinematycznej niewyznaczalności należy zablokować trzy
obroty węzłów (rys. 2.18.b) oraz trzy możliwe przesuwy przez dodanie podpór linowych (rys. 2.18.c):
SKN
=33=6
W przypadku gdy znany jest wzór transformacyjny na pręt z podporą ślizgową wystarczy zablokować tylko
dwa przesuwy (rys. 2.19) i trzy obroty (rys. 2.18.b).
Rys. 2.19. Łańcuch kinematyczny bez zablokowanego przesuwu w podporze ślizgowej
SKN
=32=5
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Wyszukiwarka
Podobne podstrony:
2003 02 23
2012 02 23 czesc 2
2010 02 23
2007 02 23 wzorcowa umowa przylaczeniowa
ODL I sem termin3 09 02 23
02 23 o odpadach
2010 02 23
2002 02 23
1998 02 23 0426
2012 02 23 czesc 1 1
rat med 11 02 23
Prawo cywilne wyk.14 2010-02-23, Prawo Cywilne
02 23 2010
2012 02 23 interim forecast eni Nieznany (2)
2011.02.23, Psychologia, II semestr, Procesy poznawcze
IE01 05[1] 02 23 (2)
2003 02 23
2012 02 23 interim forecast en (1)
więcej podobnych podstron