Elektor
3/2000
computer-Experimentiersystem ist im
Textkasten zu finden.
C A N - B
U S
-
E
X P E R I M E N T A L S Y S T E M
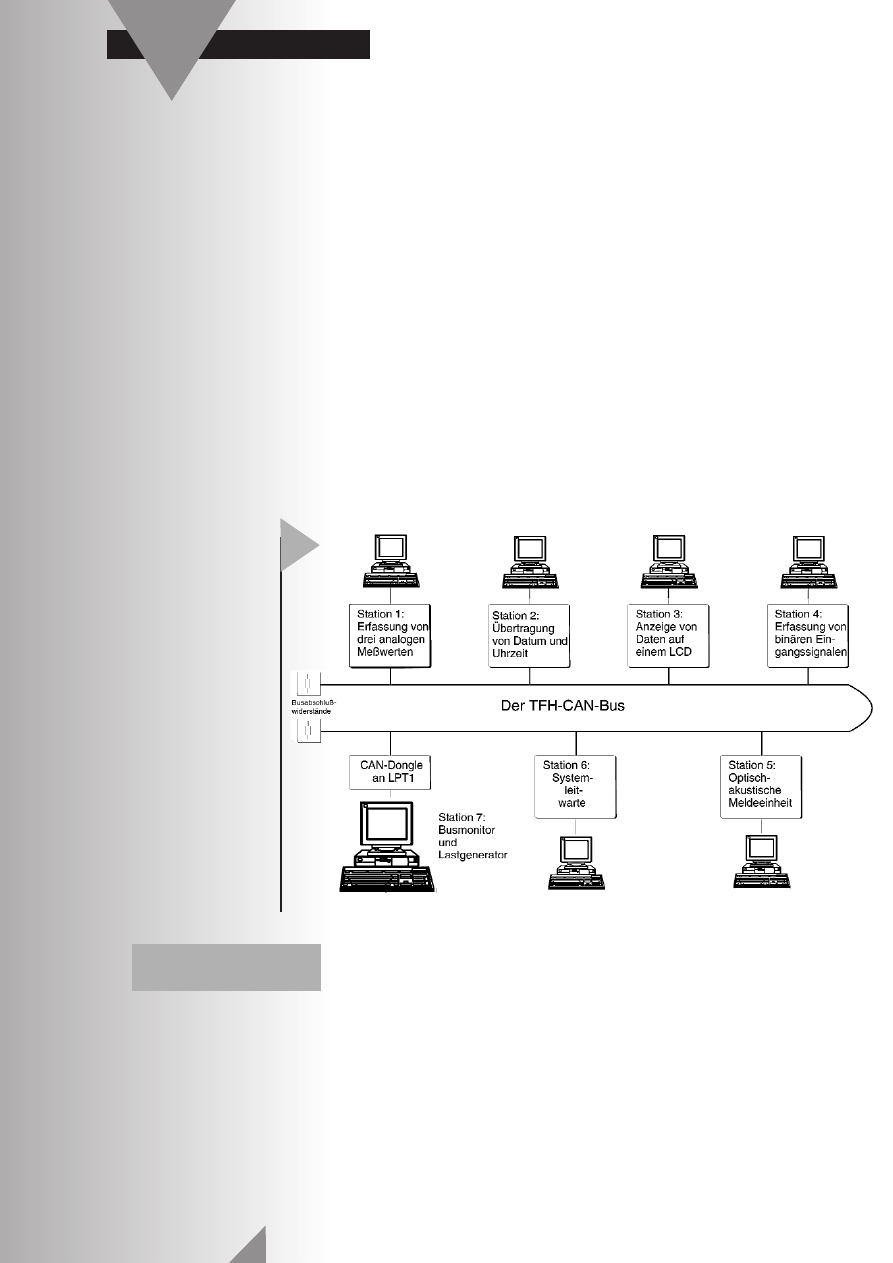
In diesem System (Bild 1) werden die
wichtigsten Aufgaben, die ein Feldbus-
system grundsätzlich erfüllen muss,
realisiert:
• Erfassung von analogen Messwerten
und deren Verteilung
• Einlesen und Ausgeben von digitalen
(binären) Informationen:
• Erfassung von Tastendrücken und
Ansteuerung von akustischen Meldern.
• Einspeisung komplexer Datensätze:
Uhrzeit und Datum als gemeinsame
Zeitbasis für das gesamte System.
• Darstellung komplexer Systeminfor-
mationen auf einem LC-Display.
• Programmierung einer zentralen
Leitstation (Systemleitwarte) am Bus,
auf der alle relevanten Systeminfor-
mationen dargestellt werden.
• Integration einer Busmonitorstation,
die den gesamten Frameverkehr auf
dem Bus überwacht bzw. darstellt
und die als Lastgenerator fungiert,
d.h. die einen zusätzlichen Frame-
verkehr zwischen ”Phantom-Statio-
nen” auf dem Bus erzeugen kann.
70
Can-Bus-Funktionen praktisch testen
Von den Autoren der CAN-Bus-Artikelreihe (Elektor 9 bis
12/99) wurde mit dem 80C537-Mikrocontroller, dem CAN-
Bus-Interface und einem in Pascal51 geschriebenen Soft-
warepaket ein experimentelles CAN-Bus-System ent-
wickelt, das wir hier kurz und im Internet ausführlich vor-
stellen – inklusive Software zum Download.
Das TFH-CAN-Bus-
Experimentalsystem
MIKROPROZESSOREN
TFH steht für die Technische Fach-
hochschule Georg Agricola in Bochum,
an der das System von Bernd vom
Berg und Peter Groppe entwickelt
wurde. Das experimentelle CAN-Bus-
System kann dabei sowohl mit den im
Standard-Eurokarten-Format gehalte-
nen TFH-Boards als auch mit den
kompakteren Platinen des CAN-Bus-
und 537-Light-Boards realisiert wer-
den, die in Elektor vorgestellt wurden.
Eine Übersicht über das TFH-Mikro-
Bild 1. Das TFH-CAN-
Bus-Experimentalsystem
1
In der Realität können die einzelnen
Feldbus-Stationen durchaus einige
hundert Meter voneinander verteilt
angeordnet sein. Im Laboraufbau
beträgt die Gesamtausdehnung dieses
Bussystems jedoch nur etwa 30 m,
wobei die Datenübertragungsrate
50 kBit/s beträgt.
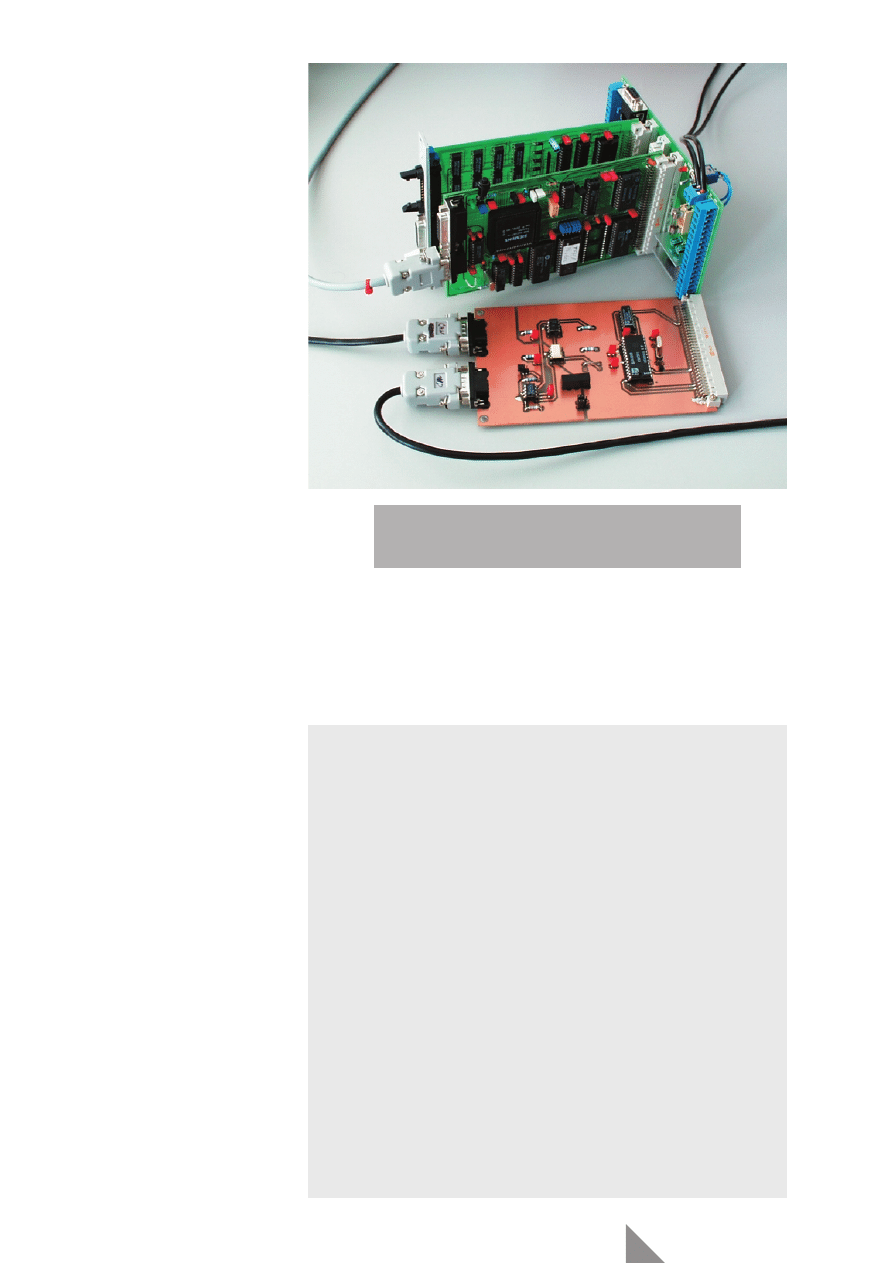
Die einzelnen CAN-Stationen beste-
hen dabei minimal aus einem Mikro-
controller-Board und einem CAN-
Bus-Interface. Dafür können das 537-
Light-Board (Elektor 1/2000) und das
CAN-Bus-Interface (Elektor 11/99) ein-
gesetzt werden. Die Verschaltung der
Verbindungsleitungen wurde bereits
im Artikel CAN-Bus-Praxis (ebenfalls
in Heft 1/2000) beschrieben. Der Auf-
bau einer CAN-Station mit Platinen
des TFH-Systems ist in Bild 2 zu
sehen. Die Controller-Karte im Euro-
Format ist hier der 80C537-Einplati-
nencomputer aus Elektor Juni 1997,
der auch über eine Echtzeituhr ver-
fügt. Daneben befindet sich eine DIO-
Karte, die I/O- und Zusatzfunktionen
zur Verfügung stellt. Die beiden Plati-
nen werden durch eine Backpla-
neplatine miteinander verbunden.
Die TFH-CAN-Karte im Vordergrund
unterscheidet sich vom Elektor-CAN-
Bus-Interface nur durch das Platinen-
format und den zur TFH-Backplane
passenden Steckverbinder.
Ein Anschluss des CAN-Bus-Interfa-
ces an andere Mikrocontroller-
Systeme ist natürlich ebenfalls mög-
lich (z.B. an 8031er/8051er- und
80535er-Boards oder Boards mit
Motorola-Controllern). Allerdings nur,
wenn die entsprechenden Bus- und
Steuersignale zur Verfügung stehen
bzw. von einer Betriebssoftware
erzeugt werden.
Die in Bild 1 an den CAN-Stationen
noch eingezeichneten PCs sind die Ent-
wicklungsrechner für die Stationssoft-
ware (natürlich ist ein einziger PC völlig
ausreichend !) und dienen im Betrieb,
während der Testphase, lediglich als
”dumme Terminals” zur Anzeige von
wichtigen, stationsinternen Daten. Im
endgültigen Einsatz des CAN-Busses
können sie ersatzlos entfallen.
S
O F T W A R E U N D
M
Ö G L I C H K E I T E N
Sowohl die Betriebssoftware als auch
die Applikationssoftware für die
Anwendungen sind in Pascal51
geschrieben (siehe Literaturhinweis).
Für die Programmierung in BASIC
wurden im Artikel CAN-Bus-Praxis
(Heft 1/2000) Beispiele angegeben. Für
die Programmierung in C51: hierzu
finden sich reichhaltige Hinweise
(Flussdiagramme und Programmaus-
schnitte) in den Applikationsunterla-
gen der Firma Philips [6].
Mit dem von Bernd vom Berg und
Peter Groppe erstellten Software-Paket
can.pas (can.hex) (siehe 2. Textkasten)
ist es sehr einfach möglich, die CAN-
Bus-Interfaces in Verbindung mit dem
jeweiligen Mikrocontroller-System zu
testen, ein CAN-Bus-System schritt-
weise aufzubauen und in Betrieb zu
nehmen. Die einzelnen Stationen des
TFH-CAN-Bus-Experimentalsystems in
Bild 1 haben dabei im Wesentlichen
folgende Funktionen:
71
Elektor
3/2000
Bild 2. CAN-Bus-Station, aufgebaut aus den TFH-
Komponenten Backplane, Controllerkarte, DIO-
und CAN-Karte.
Das TFH-Experimentiersystem
Das 80C537er-TFH-System ist ein modular aufgebautes Mikrocontroller-Lern- und
Lehrsystem für das Selbststudium und für den Unterricht an technischen Schulen.
Die Basis sind Mikrocontroller aus der 8051er-Familie. Das Konzept baut auf sechs
optimal aufeinander abgestimmten Säulen für den modernen Mikrocontroller-Unter-
richt:
1. Die Lehr- und Praktikumsbücher (siehe Literaturhinweise zu diesem Artikel).
Hier werden theoretische Grundlagen leicht verständlich erklärt und unmittelbar
mit Praxisbeispielen verknüpft.
2. Das Mikrocontroller-Entwicklungssystem dient zum sofortigen Ausprobieren
der Theorie. Das System ist modular aufgebaut und lässt somit große Spielräume
für Eigenentwicklungen. Zurzeit sind folgende Karten erhältlich: Controller-Karte
mit 80C537er, Mensch-Maschine-Schnittstellen-Karte (LC-Display, Matrixtasta-
tur, Sprachausgabe, serielle Peripherie-Bausteine), Digitale I/O-Karte, CAN-Bus-
Interface-Karte, Analog-Out-Karte, Starter-Kit-Karten, etc.
3. Die Betriebssoftware kann in allen gängigen 8051er-Programmiersprachen
erstellt werden: Assembler, C, Basic, Pascal.
4. Das Laborpraktikum vertieft und verfestigt das Erlernte und sorgt für vielfältige
Erfolgserlebnisse: Empfang und Dekodierung von DCF77er-Zeitzeichensigna-
len, Real-Time-Clock, Smarte Sensoren, LED-Display-Treiber, CAN-Feldbussy-
stem, etc.
5. Eine Multimedia-Lern-CD unterstützt die Bücher, die Hard- und die Software
durch interaktives Begleitmaterial, das auf dem PC abläuft.
6. Die fortlaufende Entwicklung von interessanten Zusatzbaugruppen sorgt dafür,
dass das System immer auf dem neusten Stand der Technik bleibt.
Weitere Informationen via Internet (http://www.palmtec.de) oder E-Mail:
vom.Berg@tfh-bochum.de
Station 1:
Erfassung analoger Messwerte
Drei einstellbare Spannungen werden
gewandelt und zyklisch über den
CAN-Bus gesendet.
Gleichzeitig wird der Messwert des
zweiten Kanals überwacht und bei
Überschreitung eines oberen Grenz-
wertes ein Frame gesendet, das in der
Station 5 die Alarmsirene aktiviert und
bei Unterschreiten mit einem anderen
Frame wieder ausgeschaltet.
Station 2:
Übertragung von Uhrzeit und Datum
Die Uhrzeit und die Datumswerte
werden von einer RTC ausgelesen und
auf dem CAN-Bus übertragen. Alter-
nativ kann statt der RTC ein DCF-Sig-
nal ausgewertet werden [4].
Station 3:
Anzeige von Daten auf einem LC-Display
Diese Busstation dient zur reinen
Visualisierung von Daten aus dem
System (Messwerte der Station 1, Ein-
/Ausschaltzustände Alarmsirene und
Glocke der Station 5).
Station 4:
Erfassung binärer Eingangssignale
Es werden drei Tastendrücke einer
angeschlossenen Matrixtastatur ausge-
wertet und in Form unterschiedlicher
Frames auf dem CAN-Bus publiziert.
Über zwei Taster werden die Sirene
und die Glocke der Station 5 aktiviert.
Station 5:
Optisch-akustische Meldeeinheit
An dieser Station können zwei Signal-
geber (eine Sirene und eine Glocke)
über den CAN-Bus aktiviert werden.
Station 6:
Systemleitwarte
Diese Station wertet alle Frames auf
dem Bus aus und zeigt sie zusammen
mit statistischen Daten über den Bus-
verkehr auf dem PC-Monitor an.
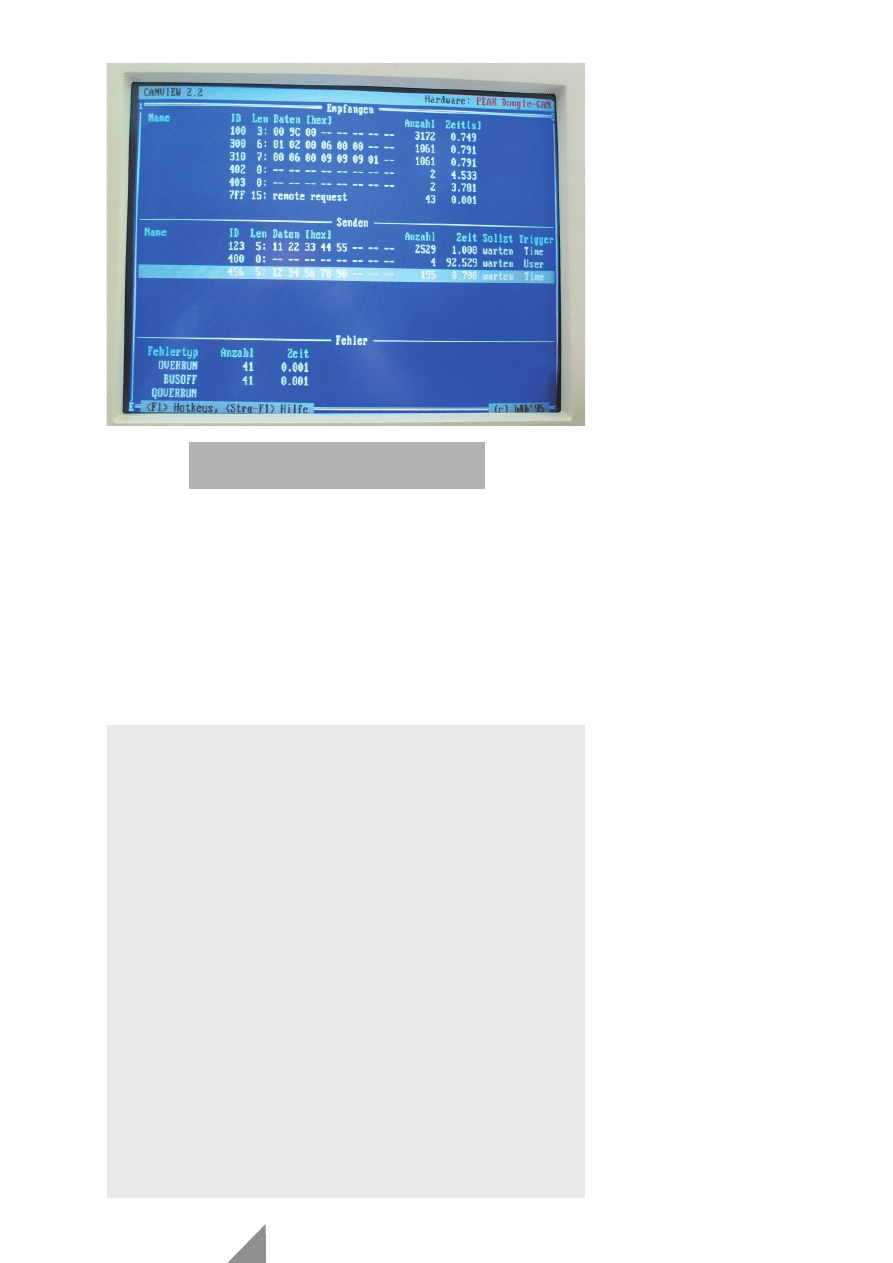
Station 7:
Busmonitor und Lastgenerator
Diese Station ist ein PC, der über einen
“CAN-Dongle” [5] an der LPT-Schnitt-
stelle direkt an den CAN-Bus ange-
schlossen ist. Eine PC-Software bietet
zahlreiche Analyse- und Testmöglich-
keiten.
I
M
I
N T E R N E T
. . .
gibt es eine kleine Premiere: Erstmals
wird ein Elektor-Artikel mit einer wei-
terführenden “elektronischen” Publi-
kation inklusive Software zum Down-
load unterstützt: Alles auf der Elektor-
Homepage http://www.elektor.de
unter dem Download-Knopf, der Sie
zu dem für jedermann und jederfrau
frei zugänglichen Download-Bereich
von Elektor führt. Lassen Sie sich über-
raschen...
(990066-5e)
Literatur:
[1] Bernd vom Berg, Peter Groppe:
”80C537-Einplatinencomputer”, Elek-
tor, Nr. 6/97
[2] Bernd vom Berg, Peter Groppe: ”Das
8051er-Lehrbuch”, Elektor-Verlag
Aachen, 1997
[3] O´ Niel V. Som ”Pascal für 8051 und
Derivate”, Elektor-Verlag, Aachen,
1998
[4] Bernd vom Berg, Peter Groppe: ”Das
8051er Praktikumsbuch”, Elektor-Ver-
lag, Aachen, 1999.
[5] PCAN-Dongle, PEAK-Service GmbH,
www.peak-service.com
[6] CAN-Bus-Controller- und Transceiver-
Bausteine, Philips-Semiconductors:
www-us.semiconductors.philips.com/
can/
www-us.semiconductors.philips.com/
can/support
72
Elektor
3/2000
Bild 3. : Die Darstellung auf der Bus-
monitor- und Lastgenerator-Station
Eigenschaften der
CAN-Betriebssoftware
can.pas
Betrieb des SJA1000 im BasicCAN-Modus
Interaktive Parametrierung des SJA1000:
• Festlegung der Datenübertragungsrate im Bereich von 5 kBit/s bis zu
1 MBit/s.
• Vorgabe eines festen (Default)Sendeframes mit variabler
Datenfeldlänge und variablem Inhalt der Datenbytes.
• Einstellung des Akzeptanz-Empfangsfilters: Festlegung des
Akzeptanz-Codes und der Akzeptanz-Maske.
• Festlegung eines RTR-Antwort-Frames.
Aussendung von Frames:
• Aussendung von Frames mit festen Datenwerten.
• Aussendung des zuvor parametrierten (Default)Frames.
• Aussendung eines RTR-Frames (≡ RTR-Anforderung an eine
andere Station)
Empfang von Frames:
• Fehlerüberprüfung und Darstellung der Fehlerart.
• Darstellung der Inhalte der empfangenen Frames
• Automatische Auswertung von empfangenen RTR-Frames und
Aussendung des zuvor parametrierten RTR-Antwort-Frames.
Wyszukiwarka
Podobne podstrony:
Adaptacja sieci CAN BUS do zast Nieznany (2)
CAN Bus Praxis
CAN BUS Sp
CAN Bus Drivers for Atmel C51 Products
CAN Bus Interface fuer PC
CAN BUS
Der CAN Bus (2)
Can Bus Komfort, Antrieb, Diagnose
CAN bus
Der CAN Bus (3)
Audi A4 CAN bus wires 2002
ford km tool can bus user manual carsets co uk
579393d1434286492 any interest e60 can bus code hacking 10 e60 voltage supply bus systems
CAN Bus English
SSP 024 ru Мультиплексная Шина CAN BUS
więcej podobnych podstron