Katedra Trakcji Elektrycznej
Laboratorium Pojazdów Elektrycznych
Napędy falownikowe w pojazdach elektrycznych
1. Wstęp
W napędach pojazdów elektrycznych poszukiwano rozwiązań pozwalających w łatwy
sposób sterować prędkością obrotową silników przy utrzymaniu wymaganych parametrów
trakcyjnych. W systemach prądu stałego jako silniki napędowe powszechnie wykorzystuje się
silniki szeregowe ze względu na bardzo dobre własności trakcyjne, korzystną charakterystykę
silnika szczególnie przydatną w napędach wielosilnikowych.
Rozwój sterowalnych półprzewodnikowych przyrządów mocy (p.p.m.) pozwolił na
zastosowanie silników prądu przemiennego w pojazdach zasilanych napięciem stałym – z
sieci napowietrznej lub z własnego źródła energii (tzw. pojazdy autonomiczne). Podstawą
napędów trakcyjnych stały się silniki asynchroniczne klatkowe wraz z falownikami napięcia.
W ostatnim czasie wzrasta zainteresowanie zastosowaniem silników synchronicznych z
magnesami trwałymi w napędach trakcyjnych, szczególnie w autonomicznych pojazdach
elektrycznych.
Dla pojazdów małych i średnich mocy stosowane są w przekształtnikach tranzystory
IGBT, dla dużych mocy (lokomotywy, zespoły trakcyjne) – tyrystory GTO. Sterowanie
układami napędowymi realizowane jest w nowoczesnych pojazdach wyłącznie w technice
mikroprocesorowej, co umożliwia realizację przez sterownik dodatkowych funkcji (min.
kontrola i diagnostyka).
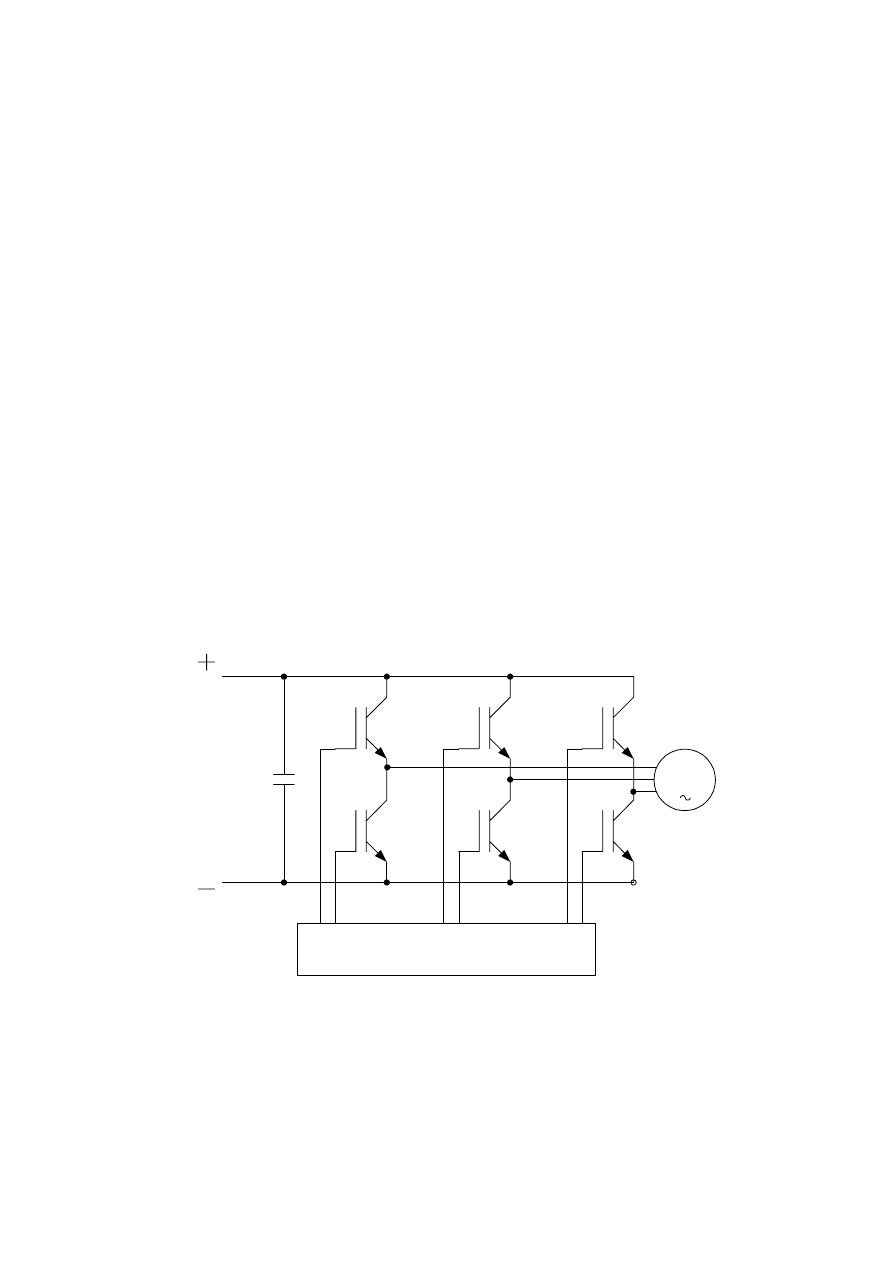
W pojazdach elektrycznych wykorzystuje się najczęściej trójfazowe falowniki mostkowe.
Schemat ogólny przedstawiono na poniższym rysunku:
T1
T3
T5
T2
T6
T4
generator PWM
C
M
3f
Rys.1 Widok ogólny falownika napięcia
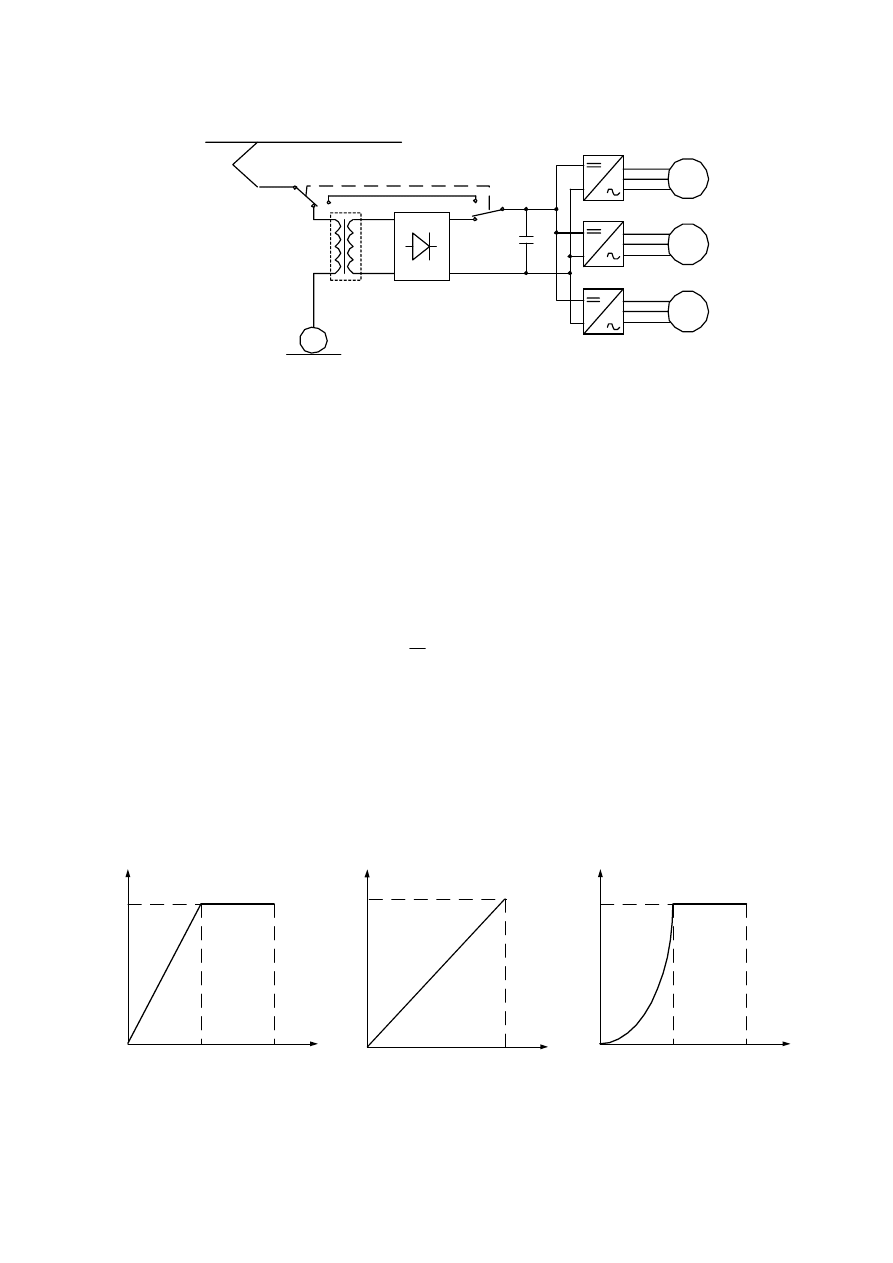
Zastosowanie falowników opartych na sterowalnych p.p.m pozwoliło na budowę pojazdów
wielosystemowych, zasilanych zarówno z sieci prądu przemiennego, jak i stałego. Schemat
takiego pojazdu przedstawiono na rysunku 2.
Katedra Trakcji Elektrycznej
Laboratorium Pojazdów Elektrycznych
SAK
SAK
SAK
3 kV
DC
, 15 kV 16 2/3 Hz, 25 kV 50 Hz
transformator
prostownik
falowniki
napięcia
silniki
trakcyjne
obwód
pośredniczący
odbierak pradu
Rys.2. Schemat ogólny pojazdu wielosystemowego
2. Charakterystyka układów napędowych
2.a. Silniki asynchroniczne
Zasada
działania falownika napięciowego z modulacją PWM opiera się na
odpowiedniej sekwencji zamykania i otwierania poszczególnych kluczy elektronicznych
(T1-T6), takiej, aby na wyjściu z falownika uzyskać trójfazowe napięcie przemienne o
kształcie zbliżonym do sinusoidy. Algorytm sterowania napędem z silnikiem
asynchronicznym opiera się na zasadzie stałego stosunku napięcia i częstotliwości
wyjściowej.
const
f
U =
Interpretacja graficzna tego sposobu sterowania została przedstawiona na rysunku 3.
Rysunek 3a) przedstawia charakterystykę podstawową, dla której stosunek U/f=const jest
utrzymywany tylko w pewnym zakresie częstotliwości. Powyżej częstotliwości granicznej f
gr
,
napięcie jest utrzymywane na stałym poziomie, zwiększana zostaje tylko częstotliwość,
rysunek 3b) pokazuje charakterystykę liniową, która charakteryzuje się stałością stosunku U/f
w całym przedziale częstotliwości, natomiast na rysunku 3c) została przedstawiona
charakterystyka wentylatorowa (kwadratowa).
a) b)
c)
U [V]
f [Hz]
f
max
U
max
f
gr
U [V]
f [Hz]
f
max
U
max
U [V]
f [Hz]
f
max
U
max
f
gr
Rys.3. Charakterystyki wyjściowe U(f) - a) podstawowa - b) liniowa - c) kwadratowa
Katedra Trakcji Elektrycznej
Laboratorium Pojazdów Elektrycznych
2.b Silniki synchroniczne z magnesami trwałymi
Dynamiczny rozwój technologii wytwarzania magnesów trwałych spowodował wzrost
zainteresowania tego typu silnikami w napędach przekształtnikowych, również w napędach
trakcyjnych. Początkowo głównym kierunkiem zainteresowania było zastosowanie silników
bezszczotkowych prądu stałego (DC brushless) i prądu przemiennego (Permanent Magnet
Synchronous Motors) w autonomicznych pojazdach hybrydowych i elektrycznych. Pojawiają
się również próby zastosowania silników synchronicznych z magnesami trwałymi w
napędach tramwajowych i pojazdach większych mocy.
Bardzo często parametry trakcyjne porównywane są z parametrami silników DC. Do zalet
silników synchronicznych zaliczyć można:
• dużą przeciążalność momentem - powyżej 2
• wysoką sprawność
• szeroki zakres prędkości obrotowej (typowo od 0 do około 6000 obr/min)
• korzystny wskaźnik mocy jednostkowej - powyżej 1 kW/kg (niewielkie gabaryty)
•
duża niezawodność (brak komutatora).
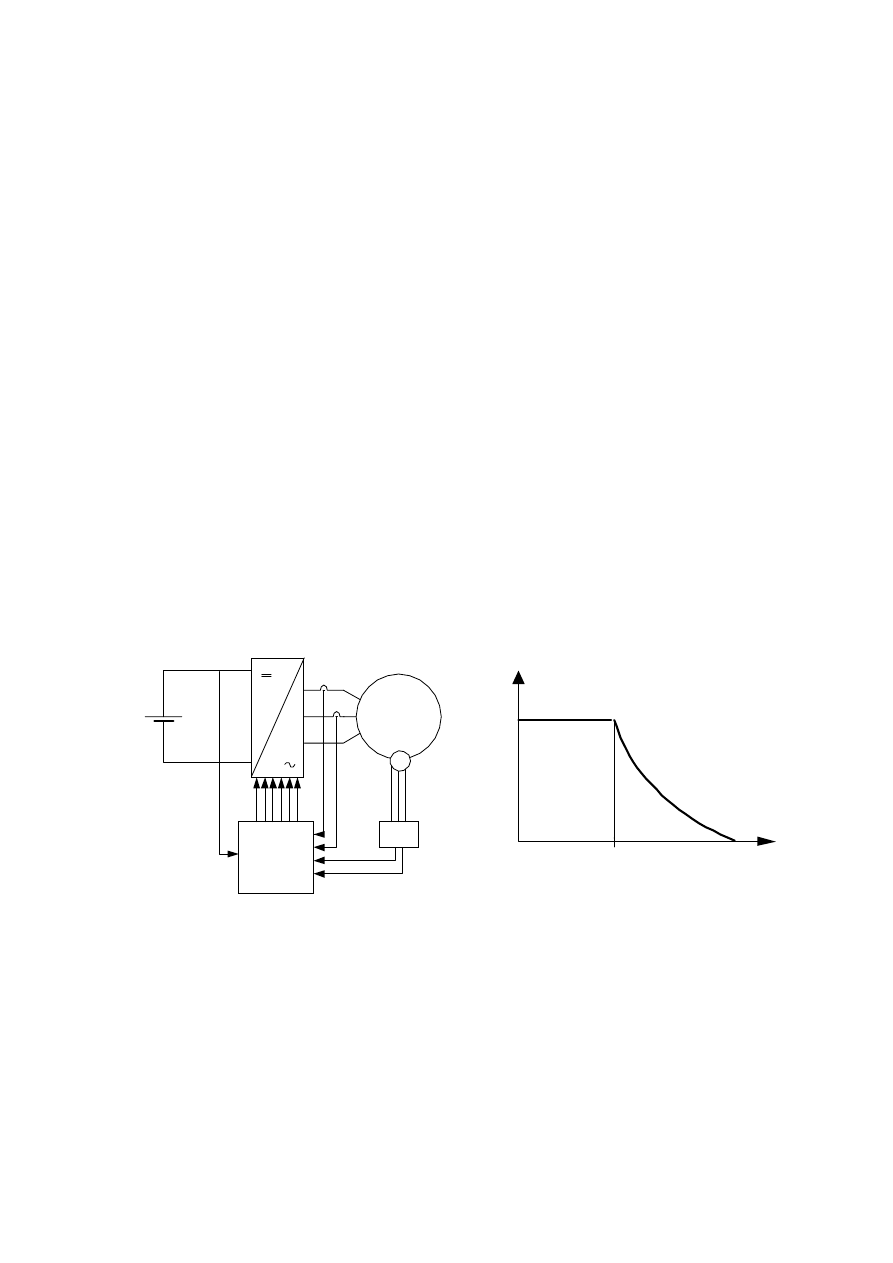
W odróżnieniu od silników asynchronicznych, do poprawnego sterownia kluczami
elektronicznymi przez mikroprocesorowy układ sterowania wymagana jest znajomość
aktualnego położenia i prędkości kątowej wirnika. Wymagane są więc czujniki do pomiaru
położenia i prędkości. W napędach trakcyjnych rolę tą pełni rezolwer. Sterowanie silnikami
synchronicznymi opiera się na algorytmach w trybie regulacji momentu lub prędkości,
opartymi na sterowaniu wektorowym FOC (ang. Field Oriented Control). Schemat ogólny
napędu z silnikiem synchronicznym i charakterystyka silnika został przedstawiony na rys4.
PMSM
DSP
generator PWM
U
DC
i
A
i
B
ω
θ
RDC
B
R
3f
M
ω
stały moment
stała moc
ω
a
b
ω
Rys.4. Schemat ogólny napędu z silnikiem synchronicznym oraz charakterystyka wyjściowa
3. Cel ćwiczenia
Celem ćwiczenia jest:
a)
poznanie struktury przekształtnika – obwód mocy, obwód sterowania,
sterownika mikroprocesorowy, na przykładzie układu laboratoryjnego o mocy
15 kW,
b) zapoznanie
się ze sposobami zadawania parametrów napędowych,
c)
pomiary i rejestracja prądów i napięć w charakterystycznych punktach napędu
falownikowego o mocy 5,5 kW ,
d)
wyznaczenie charakterystyki wyjściowej falownika o mocy 15 kW.
Katedra Trakcji Elektrycznej
Laboratorium Pojazdów Elektrycznych
4. Opis badanych układów
4.1. Przekształtnik laboratoryjny o mocy 15 kW
Przemiennik częstotliwości składa się z trzech części:
a) obwodu mocy, w którym poprzez prostownik niesterowany następuje prostowanie
napięcia przemiennego sieci zasilającej, jego filtracja na kondensatorze o dużej
pojemności i przekształcanie w falowniku napięcia z modulacją PWM na napięcie
trójfazowe o zadanej wartości i częstotliwości,
b) sterownika bramkowego, który jest układem pośredniczącym służącym do nadania
sygnałom sterującym parametrów wymaganych przez tranzystory IGBT oraz
pełniącym funkcję izolacji galwanicznej pomiędzy obwodem mocy a
mikroprocesorowym układem sterownia, spełniający również funkcję
zabezpieczającą,
c) układ sterowania i kontroli – oparty na mikrokontrolerze 87C196KC układ
realizujący w czasie rzeczywistym algorytmy sterowania, posiadający
wyspecjalizowane układy wejść/wyjść – cyfrowych i analogowych. Układ ten
realizuje metodę sterowania wektorem napięcia.
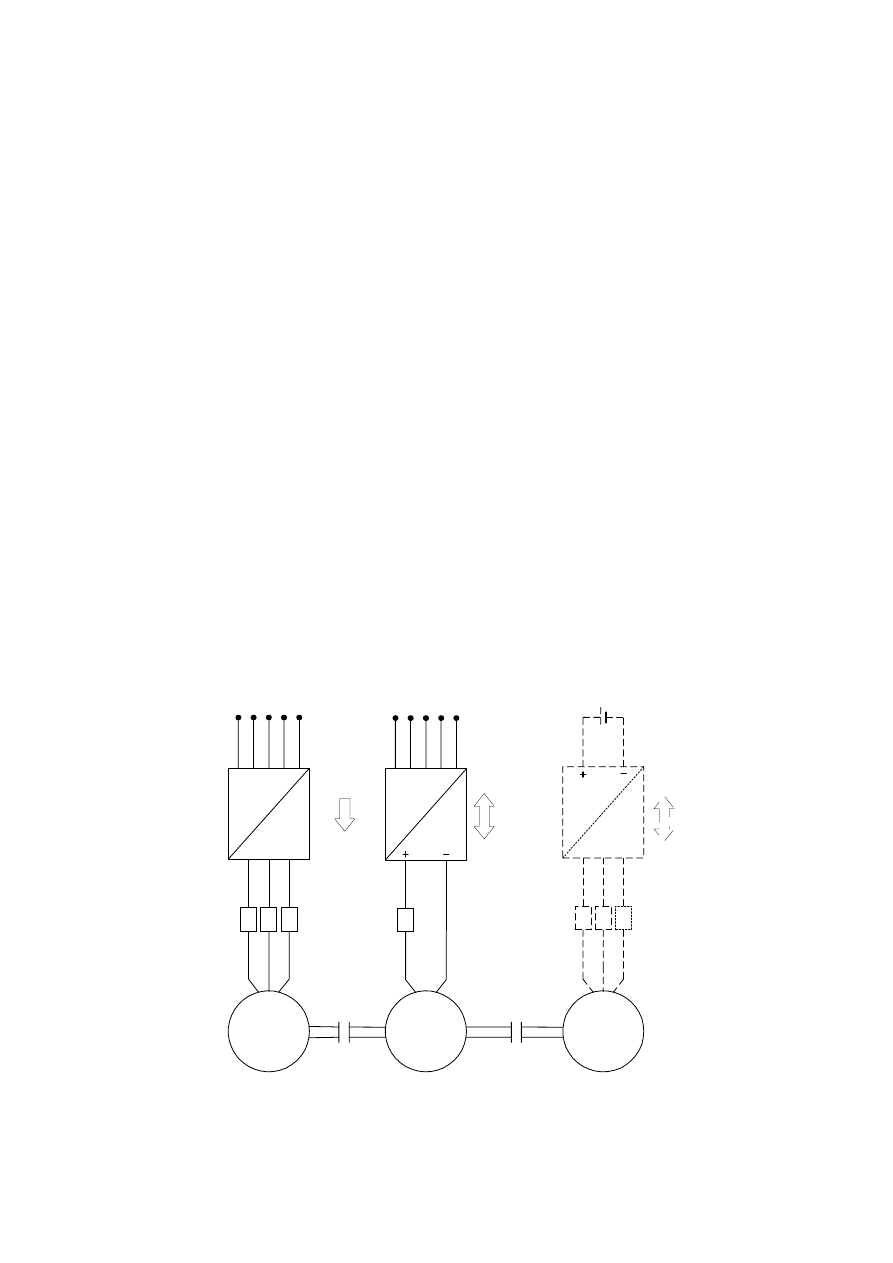
4.2. Wielomaszynowy zespół napędowy
Układ badany oparty jest na trzech silnikach połączonych wspólnym wałem: silniku
indukcyjnym, silniku bocznikowym prądu stałego i silniku synchronicznym z magnesami
trwałymi. Schemat układu został przedstawiony na rysunku 5, gdzie: SAK – silnik klatkowy,
SOPS – silnik obcowzbudny prądu stałego, PMSM – silnik synchroniczny z magnesami
trwałymi, LEM – przetworniki pomiarowe, E – kierunek przepływu energii, L1.........PE – sieć
zasilająca o parametrach przemysłowych, Bat – akumulatory.
SAK
SBPS
PMSM
U, f = var
U, f = const
LEM
LEM
LEM
L1 L2 L3 N PE
LEM
L1 L2 L3 N PE
E
E
E
LEM
LEM
LEM
U, f = var
BAT
Rys. 5. Schemat zespołu wielomaszynowego

Katedra Trakcji Elektrycznej
Laboratorium Pojazdów Elektrycznych
Każdy z silników posiada własny układ zasilający oparty na przemysłowych
przekształtnikach firmy ..............., za wyjątkiem silnika PMSM, dla którego układ
zasilający jest w trakcie budowy.
4.2.1 Parametry układów przekształtnikowych
a)
Silnik indukcyjny klatkowy:
Typ silnika – .....................
Moc znamionowa – 5,5 kW
Napięcie znamionowe – 380 V
Prąd znamionowy – 20 A
Układ połączenia – trójkąt
Obroty znamionowe – 2950 obr/min
Chłodzenie – własne
Czujnik położenia – encoder
Przekształtnik ............ 690 N
Moc znamionowa – 5,5 kW
Mikroprocesor - ................................
Brak opcji hamowania dynamicznego
Zadawanie parametrów trakcyjnych:
- panel
operatora
- sterownik
programowalny
- komputer PC (przez złącze RS 485)
b)
Silnik obcowzbudny pradu stałego:
Typ silnika – .....................
Moc znamionowa – 5,5 kW
Napięcie znamionowe – 400 V
Prąd znamionowy – 35 A
Obroty znamionowe – 2950 obr/min
Chłodzenie – wymuszone
Czujnik położenia – encoder
Przekształtnik ............ 590 N
Moc znamionowa –
Mikroprocesor - ................................
Hamowanie ze zwrotem energii do sieci
zasilającej (4QS)
Zadawanie parametrów trakcyjnych:
- panel
operatora
- sterownik
programowalny
- komputer PC (przez złącze RS 485)
c)
Silnik synchroniczny z magnesami
trwałymi:
Typ silnika – ............................
Moment znamionowy – 12 Nm
Napięcie znamionowe – 3*220 V
Prąd znamionowy – 20 A
Układ połączenia – gwiazda
Obroty znamionowe – 4000 obr/min
Chłodzenie – własne
Czujnik położenia – rezolwer
Przekształtnik – w trakcie budowy
Moment znamionowy – do 20 Nm
Mikroprocesor – ADMC401
Zasilanie z baterii akumulatorów
- hamowanie ze zwrotem energii
Zadawanie parametrów trakcyjnych:
- panel
operatora
- komputer PC (przez złącze RS 485)
Katedra Trakcji Elektrycznej
Laboratorium Pojazdów Elektrycznych
5. Przebieg
ćwiczenia
Ćwiczenie laboratoryjne składa się z dwóch części:
1) Ustawienie trybów i parametrów pracy przemiennika o mocy 15 kW oraz
pomiar charakterystyk wyjściowych U(f),
2) Pomiar prądów i napięć w wybranych punktach napędu przekształtnikowego
o mocy 5,5 kW.
Część pierwsza
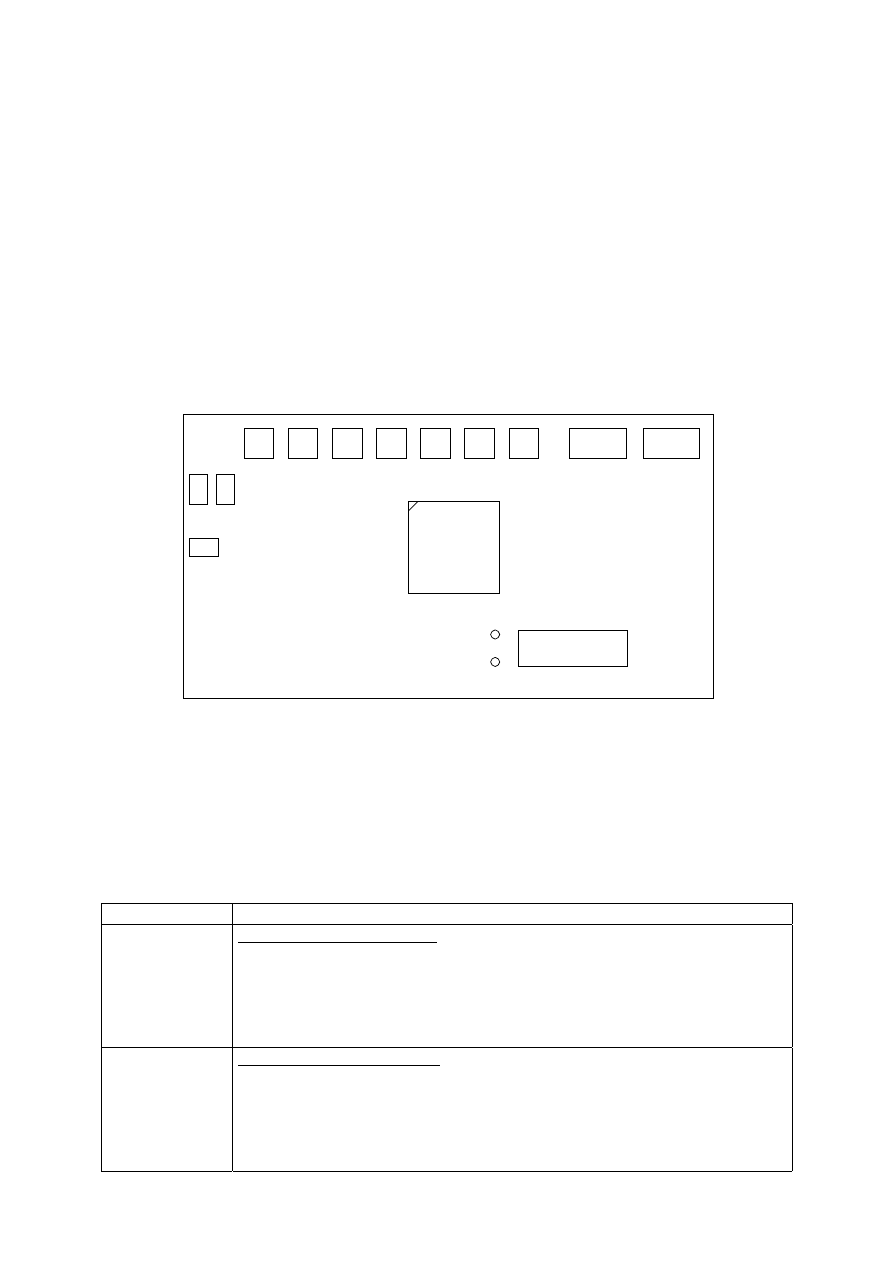
Parametry i tryb pracy przemiennika ustawiane są za pośrednictwem potencjometrów
P1... P7, przełączników SW1, SW2 oraz zworek JP1, JP2 – patrz rys. 6. Umożliwiają one
elastyczny dobór parametrów napędu. Potencjometr zadający umieszczony jest na zewnątrz
przemiennika.
P 1
P 2
P 3
P 4
P 5
P 6
P 7
SW 1
SW 2
INTEL
87C196KC
JP1 JP2
JP3
LED
zielona
LED
czerwona
WYŚWIETLACZ
Rys. 6. Widok ogólny płytki kontrolere 87C196KC
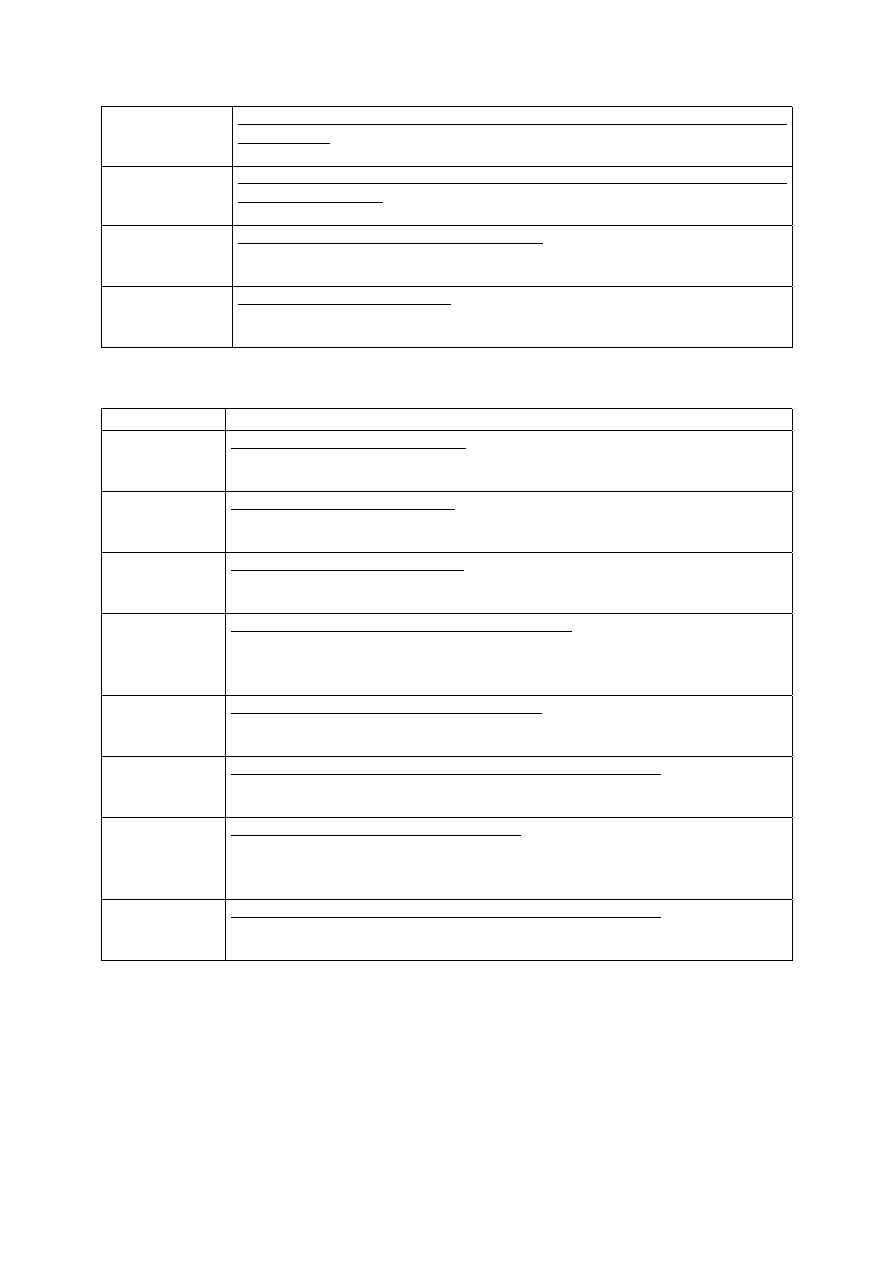
W celu wyznaczenia charakterystyk U(f) (podstawowa, liniowa i kwadratowa) należy
ustawić odpowiednio przełączniki SW1 i SW2 wg tablicy 1 i 2. Następnie należy co
określony przedział częstotliwości należy odczytywać wartość napięcia wyjściowego.
Wyniki umieścić w tabeli.
Przełącznik SW1
Tablica 1
OZNACZENIE FUNKCJA
SW1-1/2
Wybór charakterystyki U=f(f)
SW1-1 SW1-2
ON ON normalna (podstawowa)
ON OFF kwadratowa
OFF ON liniowa
OFF OFF nastawialna wg potencjometru P7
SW1-3/4
Wybór zakresu częstotliwości:
SW1-4 SW1-3
ON ON 1-100 Hz
ON OFF 1-120 Hz
OFF ON 1-200 Hz
OFF OFF 1-200 Hz
Katedra Trakcji Elektrycznej
Laboratorium Pojazdów Elektrycznych
SW1-5
Wybór zakresu dynamiki zwiększania częstotliwości od zera do częstotliwości
maksymalnej:
ON – dynamika normalna (duża), OFF – dynamika zmniejszona
SW1-6
Wybór zakresu dynamiki zwiększania częstotliwości od częstotliwości
maksymalnej do zera:
ON – dynamika normalna (duża), OFF – dynamika zmniejszona
SW1-7
Tryb hamowania (reakcja na sygnał „STOP”):
ON – przez wybieg, OFF – zmniejszanie częstotliwości do zera (zgodnie z
zadaną dynamiką), dohamowanie przez wstrzykiwanie prądu w czasie 0,1 s.
SW1-8
Opcja z rezystorem hamowania:
ON – brak rezystora hamowania,
OFF – dołączony zewnętrzny rezystor hamowania
Przełącznik SW2
Tablica 2
OZNACZENIE FUNKCJA
SW2-1
Sposób zasilania silnika na postoju:
ON silnik niezasilany (niehamowany)
OFF silnik zasilany (hamowany) prądem stałym (tzw. wstrzykiwanie prądu)
SW2-2
Sposób zadawania częstotliwości:
ON normalna charakterystyka zadawania
OFF odwrócona charakterystyka zadawania
SW2-3
Wykorzystanie łącza szeregowego:
ON łącze szeregowe nieaktywne
OFF łącze szeregowe aktywne
SW2-4
Przyjęty dla łącza szeregowego protokół transmisji:
ON protokół uproszczony (zadawanie łączem tylko częstotliwości zadanej
oraz sygnałów START/STOP)
OFF wszystkie parametry zadawane łączem
SW2-5
Zakres sygnału zadającego częstotliwość pracy
ON 0-10 V lub 0-10mA
OFF 2-10 V lub 4-20 mA
SW2-6
Wartość wyświetlana na zespole wyświetlaczy 7-segmentowych:
ON częstotliwość wyjściowa,
OFF wartość skalowana (np. prędkość obrotowa, wydajność, itp.)
SW2-7
Tryb wyświetlania parametru wyjściowego:
ON wyświetlanie normalne,
OFF wyświetlana wartość 10-krotnie zwiększona (przesunięta kropka
dziesiętna)
SW2-8
Liczba zainstalowanych układów (cyfr) w zespole wyświetlaczy:
ON 4 kostki wyświetlacza
OFF 2 kostki wyświetlacza
Część druga
Punkty pomiarowe układu wielomaszynowego zostaną wyprowadzone na stanowisko
pomiarowe (stół laboratoryjny). Pomiarów wybranych przebiegów dokonać za pomocą
rejestratora HIOKI 8831 i oscyloskopu cyfrowego HP54520A. Należy przynieść ze sobą
dyskietkę.
Wyszukiwarka
Podobne podstrony:
napedy hydrostatyczne hydrokine Nieznany
Lekki pojazd gasienicowy id 266 Nieznany
odszukaj pojazdy id 332976 Nieznany
Falownik id 167842 Nieznany
LG falowniki i filtry id 267643 Nieznany
20100126 102633 falowniki lg se Nieznany (2)
NAPEDY HYDRAULICZNE id 313565 Nieznany
Badanie halasu pojazdow id 7715 Nieznany (2)
Napedy hydrauliczne id 313598 Nieznany
oceny 3EC Napedy i Energoelektr Nieznany
Napedy 3m id 313586 Nieznany
pojazdy 4 id 370527 Nieznany
Podzial pojazdow szynowych id 3 Nieznany
Falowniki PWM id 167854 Nieznany
falownik 2, Studia, Napędy elektryczne, od marcina, ne, 1Napędy elektryczne, Napędy elektryczne, fal
więcej podobnych podstron