PODSTAWOWE POJĘCIA
Element
Elementy to człony spełniające w układzie automatyki bądź w urządzeniu automatyzowanym proste funkcje takie
jak zmiana postaci sygnałów, wzmocnienie sygnałów, porównanie sygnałów. Elementami są: silnik, prądnica,
czujnik pomiarowy, wzmacniacz, przekaźnik, zawór czy dowolny człon dynamiczny.
Człon
Człony spełniają bardziej złożone funkcje od elementów. Zbudowane są z kilku elementów. mogą być nimi np.:
urządzenia wykonawcze w skład których wchodzą elementy nastawcze i napędowe, urządzenia pomiarowe
zawierające czujniki, przetworniki itp.
Układ automatyki
Powstaje z połączenia elementów i urządzeń w pewien zespół wykonujący określone zadanie, np. układ
automatyki: maszyny, samochodu, podajnika.
System
Zestaw elementów i urządzeń które współpracują ze sobą i dzięki temu automatyzują skomplikowane urządzenia
a nawet całe fabryki. System składa się z urządzeń rozproszonych przyłączonych przewodami do modułów
we/wy które z kolei łączą się ze sterownikiem centralnym. Ten sterownik może się komunikować z operatorami
systemu przez interfejsy HMI, z serwerami akwizycji i analizy danych.
Klasyfikacja elementów i urządzeń automatyki:
Ze względu na spełniane funkcje:
- elementy i urządzenia pomiarowe (czujniki, przetworniki oraz zespoły pomiarowe)
- elementy wykonawcze (silniki, zespoły napędowe, zawory, zasuwy, elektromagnesy, siłowniki, pompy,
podajniki, regulatory bezpośredniego działania)
-urządzenia części centralnej i sterującej (sterowniki, PLC, regulatory, IC, HMI)
Zależnie od sposobu i rodzaju dostarczanej energii wyróżniamy urządzenia:
- pneumatyczne (ściśliwość powietrza do 10bar-1MPa, niska jakość regulacji, prędkości, niska dokładność
pozycjonowania, realizacja szybkich ruchów liniowych PTP, brak zagrożenia pożarowego, łatwość w
eksploatacji, niezawodność w działaniu, nie wymagają zastosowania zabezpieczeń przed przeciążeniem)
- hydrauliczne (możliwość uzyskania bardzo dużych sił przy dobrej dynamice, duża trwałość, bardzo dobry
stosunek energii do masy)
- elektryczne (nośnikiem jest sygnał elektryczny - najczęściej napięcie lub prąd stały, bardzo bogata i
rozbudowana oferta od mini do makro napędów, łatwość instalacji i eksploatacji, przesyłanie sygnałów na
dowolne odległości)
Ze względu na sposób działania wyróżnia się elementy:
-analogowe (wartość sygnału określona jest przez wartość wielkości fizycznej i może przyjmować dowolną
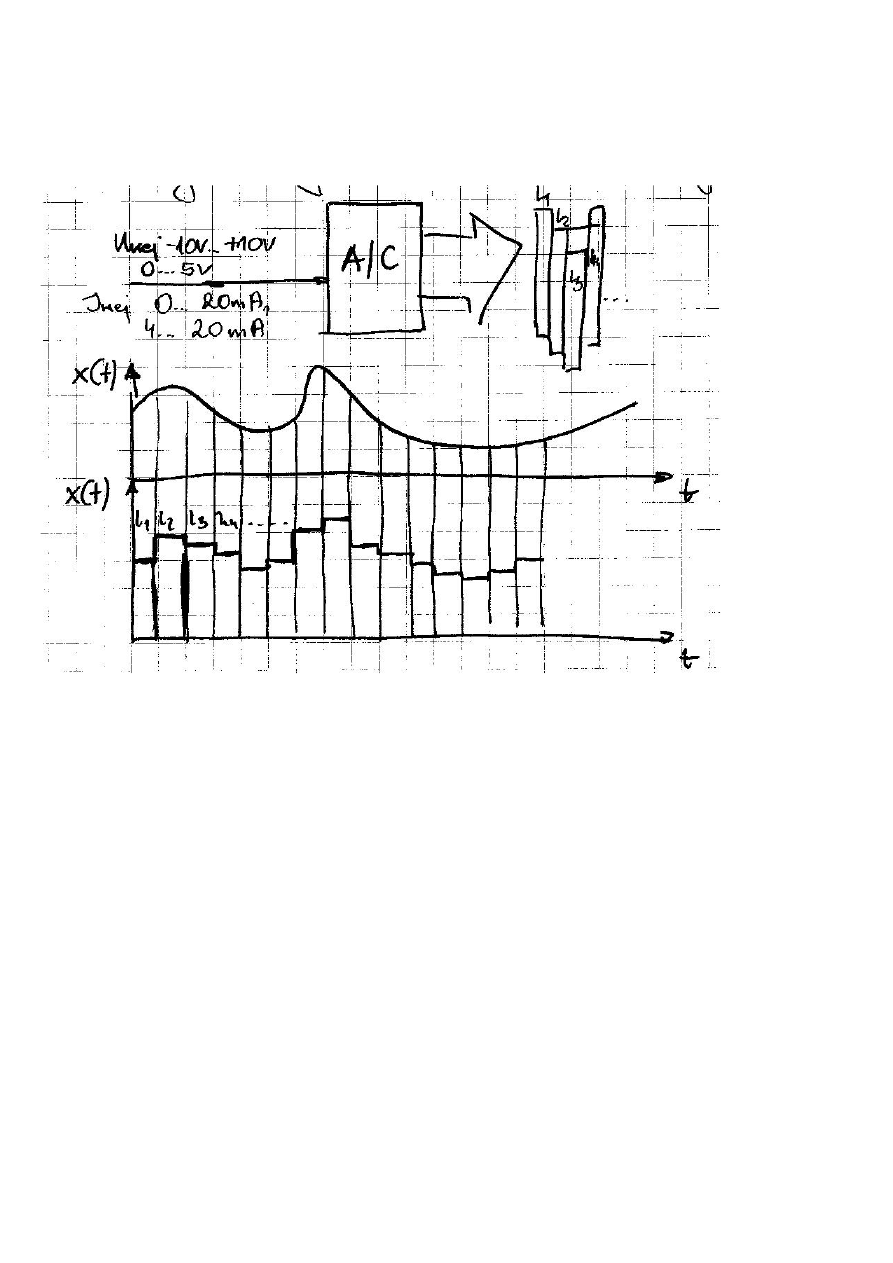
wartość z określonego przedziału, zwykle od -10V do +10V)
-cyfrowe - zastępują analogowe: przystosowane do przetwarzania przez systemy cyfrowe. Uzyskiwane przez
przetworzenie przez przetwornik A/C i C/A.
-binarne, przełączające (sygnał może przyjmować tylko jedną z dwóch wartości - 0 lub 1, kodowaną jako 0V/5V
albo 0V/24V)
NAPIĘCIA I NATĘŻENIA PRĄDU SYGNAŁÓW STOSOWANYCH W AUTOMATYCE
-24V - 0-5 poziom niski, 15-24 poziom wysoki
-przebieg prądowy - 2 standardy 0-24mA i 4-20mA (bardziej niewrażliwy na zakłócenia)
ZJAWISKA WYKORZYSTYWANE W CZUJNIKACH
CZUJNIKI ANALOGOWE I CYFROWE - ZAMIANA SYGNAŁU
Przetworniki AC / CA
a) najważniejsze parametry - zakres pomiarowy, rozdzielczość, czas przetwarzania
b) przetwornik analog-cyfra
-zamiana sygnału analogowego ciągłego na ciąg liczb podawanych na wyjście co określony czas
-liczby zapisywane są w kodzie binarnym albo BCD
-przetwarzanie A/C odbywa się w 3 stopniach: prostowanie, kwantyzacja, dyskretyzacja
c) przetwornik cyfra-analog
-przetwarzanie sygnału cyfrowego na analogowy w postaci prądu lub napięcia o wartości proporcjonalnej do tej
liczby
-przetwornik ma n wejść i 1 wyjście
-parametry jak w przypadku A/C: szybkość przetwarzania, zakłócenia, szybkość zmian napięcia, czas ustalania
TWIERDZENIE SHANON'A
Minimalna częstotliwość przetwarzania sygnału okresowego musi być min 2x większa od f tego sygnału. W
praktyce f musi być 5-10x większa.
ZASILANIE W UKŁADACH AUTOMATYKI
Układy automatyki 24 VDC:
-czujnik, przyciski, przełączniki, silniczki, lampki, sterowniki (5V)
przekaźniki
przekierowuje wyższe napięcie 24 VDC (cewka) -> 230 VAC (styki):
Układy wykonawcze (do 2kW, 1fazowe):
-żarówki, małe silniki, elektromagnesy, elementy grzejne
styczniki (mogą być na 24VDC, dla większych układów 230VAC)
230VAC (cewki) -> 3x400VAC (styki 3fazowe)
Układy mocy:
-silniki, grzałki, napędy
PE - linia zabezpieczająca
U,V,W - fazy
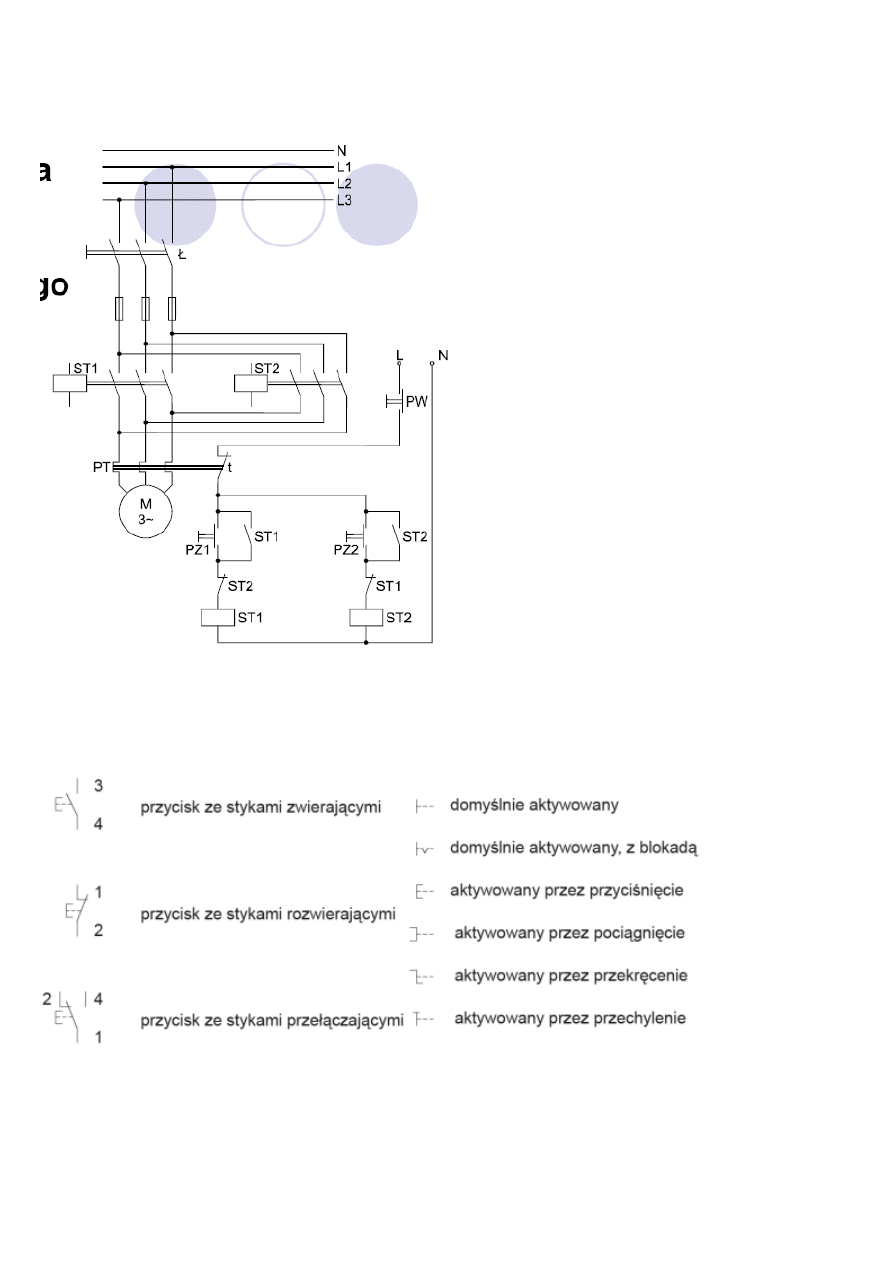
SCHEMAT ZASILANIA SILNIKA TRÓJFAZOWEGO
SCHEMAT SPRZEŁĄCZANIA OBROTÓW LEWO PRAWO Z WYKORZYSTANIEM SILNIKA
3FAZOWEGO
ELEMENTY STYKOWE W POMIARACH I PRZEŁĄCZANIU
Paramatery:
-max I, max U przełączające
-liczba i rodzaj styków
-sposób aktywacji
Astabilny - chwilowy, samopowracający. jeden do włączania drugi do wyłączania
Bistabilny - nieporacający, rzadziej stosowany
Kolory:
-czerwony - wyłącznik STOP
-zielony - START
-żółty - usuwanie błędów
-niebieski - inna funkcja
-biały - uruchamianie
PRZEŁĄCZNIKI KRAŃCOWE
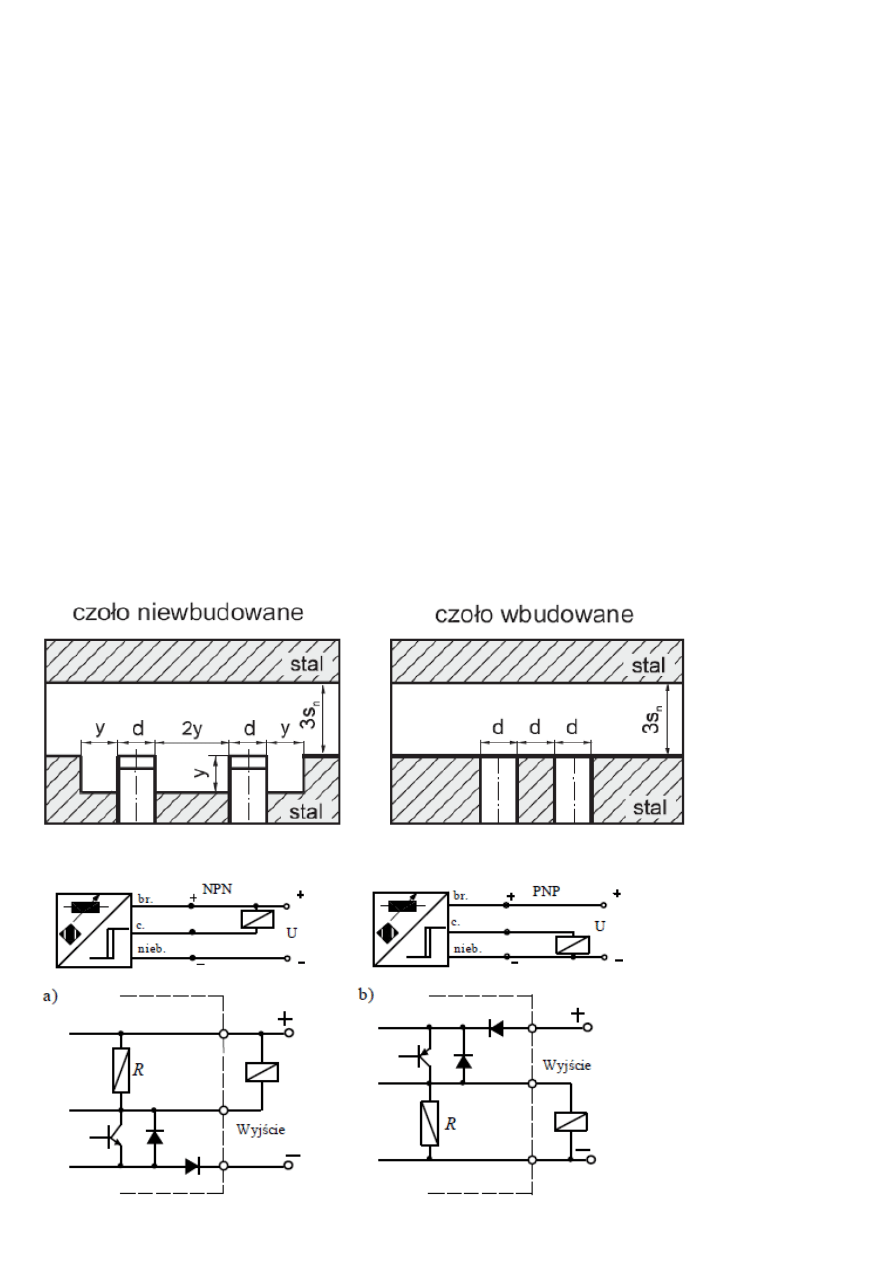
CZUJNIKI INDUKCYJNOŚCIOWE- BUDOWA I ZASADA DZIAŁANIA
-reagują na wprowadzenie metalu w strefę czułości czujnika
-w aktywnej strefie czujnika znajduje się cewka stanowiąca element składowy generatora sinusoidalnego
-przepływający przez cewkę prąd sin zmienny wytwarza wokół niej zmienne pole magnetyczne które występuje
w okolicy czoła czujnika tworząc strefę roboczą. Jeśli w trefę zostanie wprowadzony przedmiot
ferromagnetyczny to pojawiające się w nim prądy wirowe które stanowić będą niejako obciążenie generatora.
Skutkiem tego jest zmniejszenie amplitudy sygnału generatora. Zmiana jest śledozna przez demodulator i
komparator a następnie wzmacniana i przesyłana do wyjścia. Sygnał wyjściowy ma charakter dyskretny.
Budowa : cewka - generator RL - demodulato/komparator - histerea -wzmacniacz wyjściowt
PARAMETRY CZUJNIKÓW INDUKCYJNOŚCIOWYCH
a)duża trwałość
b)krótki czas odpowiedzi
-strefa działania (nominalna, rzeczywista) zależna od:
+średnicy cewki
+rodzaj zabudowy
+rodzaj metalu
-histereza
-dla układów DC naięcie zasialania 10-30V
-prąd 0,2A
-częstotliwość graniczna przełączeń kilkaset do kilku tysięcy Hz
ZASADY MONTAŻU CZUJNIKÓW INDUKCYJNOŚCIOWYCH
WYJŚCIA I SPOSÓB PODŁĄCZNIE CZUJNIKÓW DO INNYCH ELEMENTÓW
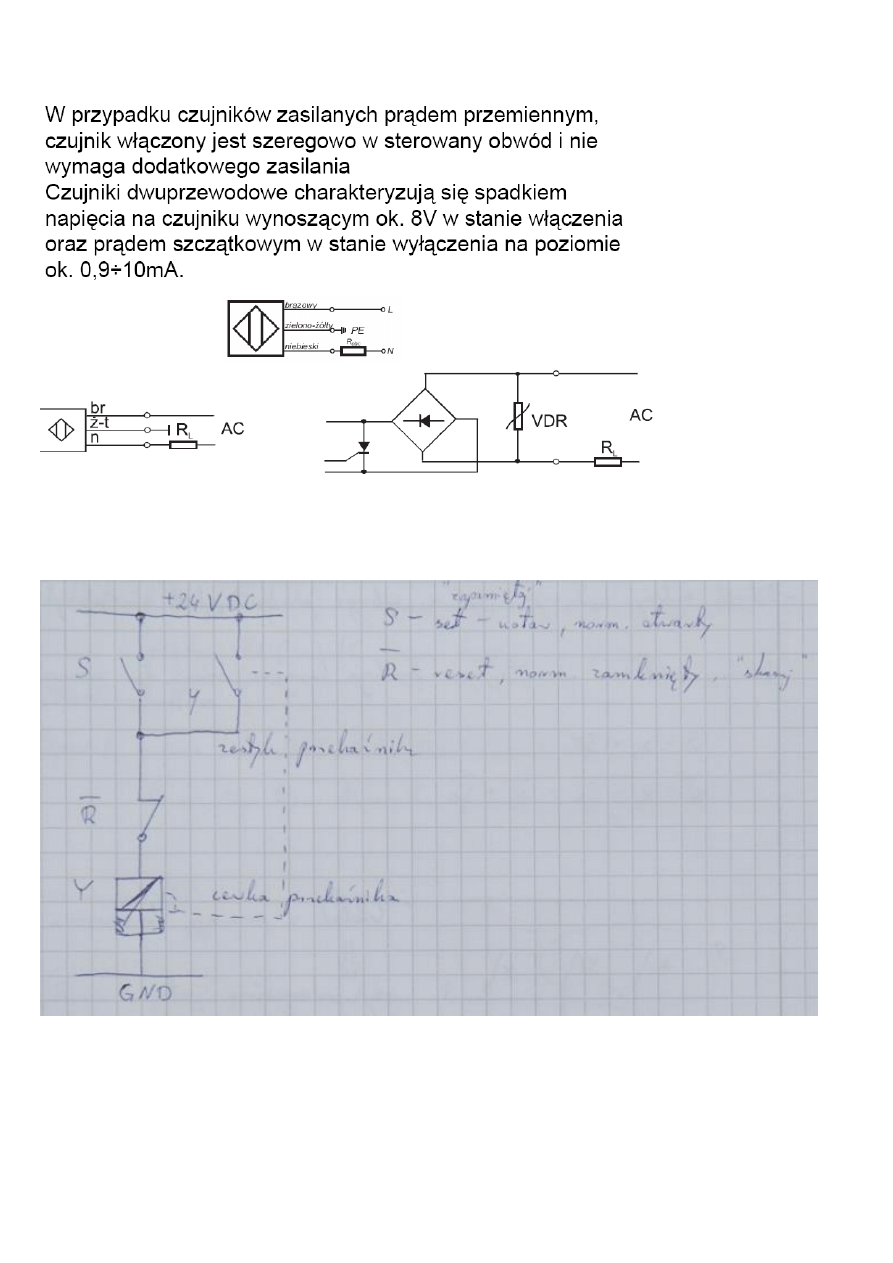
CZUJNIKI DWUPRZEWODOWE PRĄDY AC i DC
UKŁAD PAMIĘTAJĄCY NA ELEMENTACH STYKOWYCH
STEROWANIE TAŚMOCIĄGIEM ZA POMOCĄ ELEMENTÓW STYKOWYCH
RODZAJE REALIZACJI STEROWNIKÓW
Realizacja hardware
-hard-wired- odblokowanie na twardo, stałe podłączenie
-PLC - tserownik programowalny, sterownik binarny/przeysłowy/logiczny
-Industrial Computers IC - komputer przemysłowy
-microcontrollers
-systemy specjalne jak CNC, RC
Realizacja software
obecnie najbardziej rozpowszechnione sterowanie to PLC
-są przystosowane do warunków przemysłowych (izolacja galwaniczna, zabezpieczenie przed zakłoceniami,
odpowiednie zasilacze)
-łatwo wymienialne/serwisowalne - wymieniane moduły
-modułowość - łatwo rozszerzać
-prosty język programowania
-wiarygodność i niezawodność
sterowniki PLC przeznaoczne są głównie do realizacji procesów dyskretnych
komputery IC skierowane są głównie do realizacji procesów ciągłych
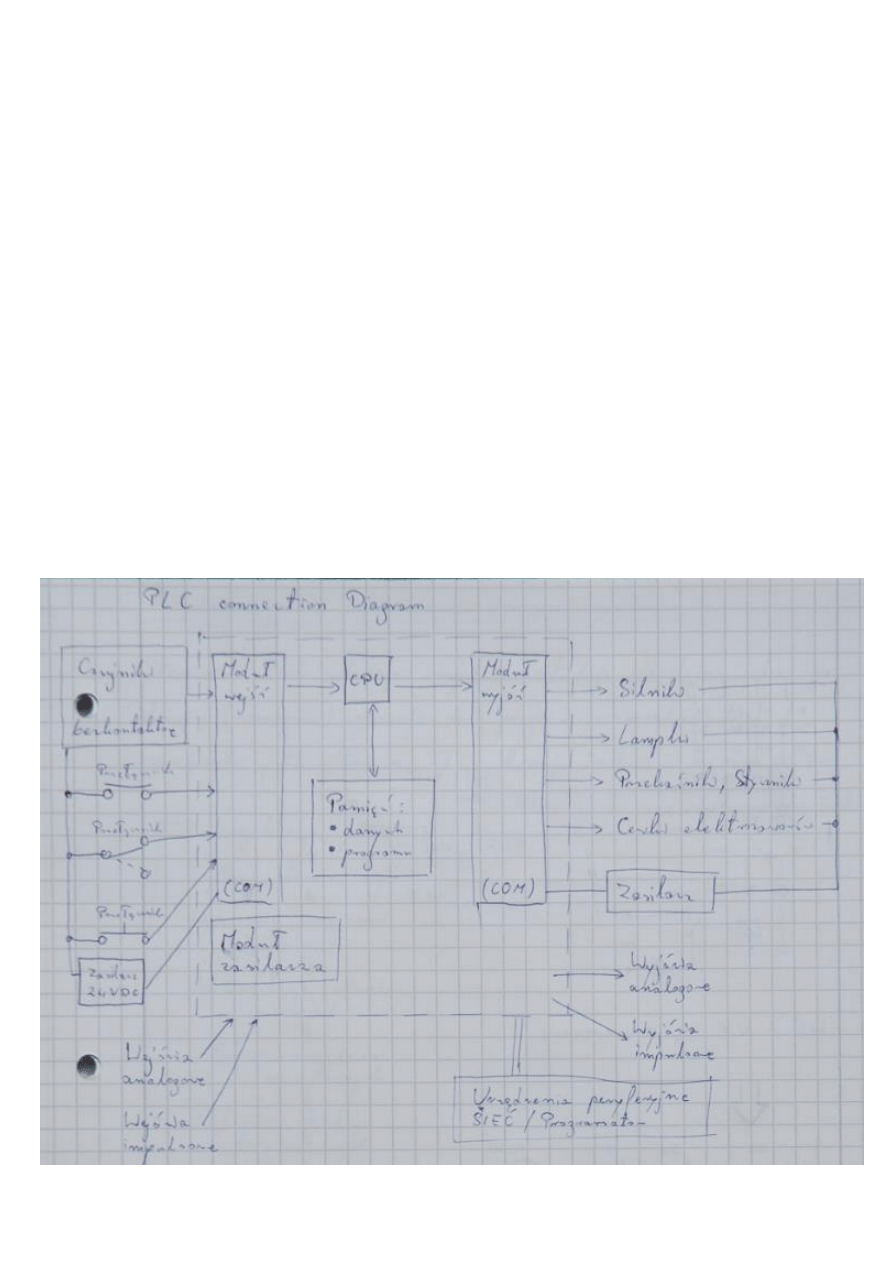
STEROWNIKI PLC, BUDOWA DZIAŁANIE. PODSTAWOWE MODUŁY WEWNĘTRZNE
Moduły PLC - typy I/O
-wejścia i wyjścia cyfrowe
-wejścia i wyjścia analogowe
-kontrolery temperatury
-moduły kontroli pozycjonowania
-konktrolery silników krokowych
-moduły PID
-moduły fuzzy logic
-moduły częstotliwości radiowych
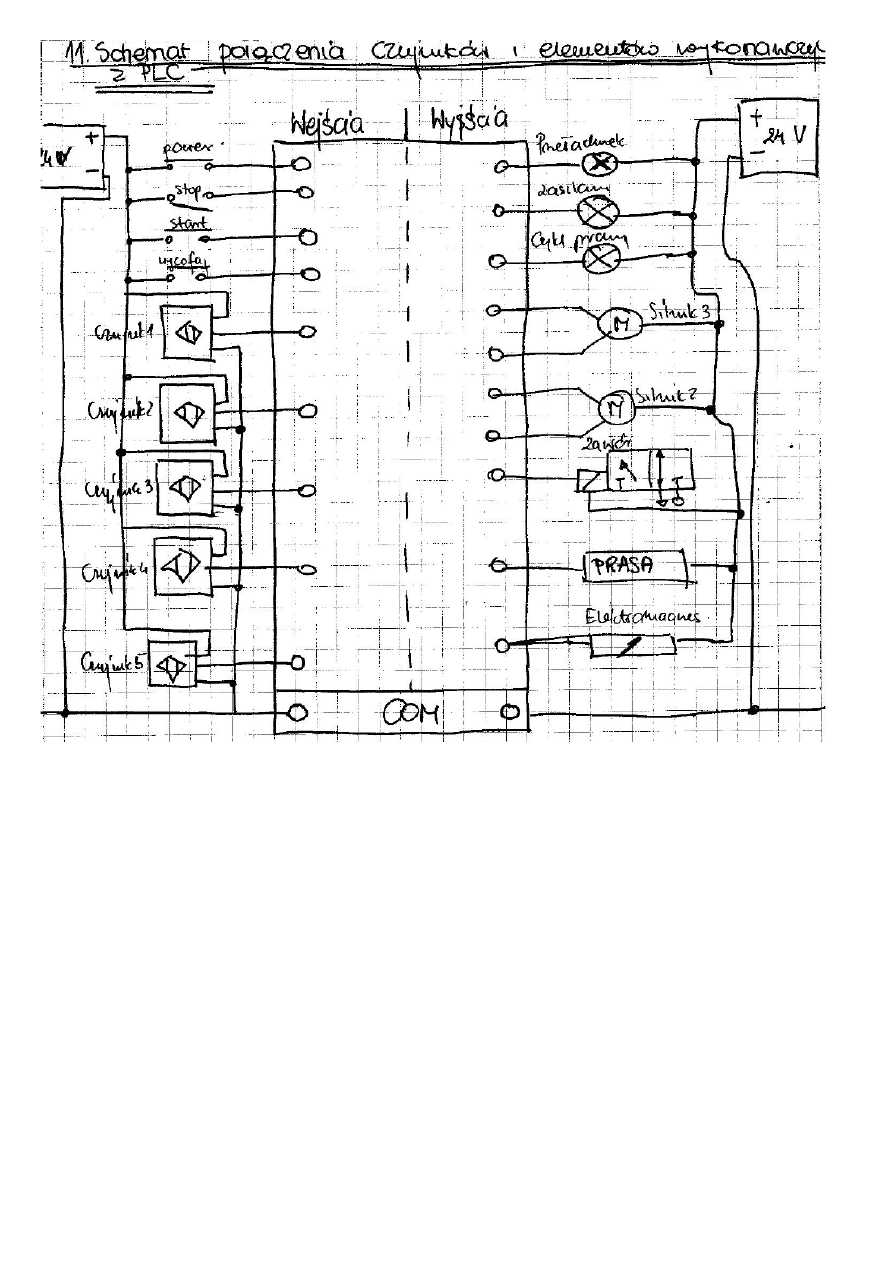
MODUŁY PODŁĄCZANIA ELEMENTÓW WEJŚCIOWYCH I WYJŚCIOWYCH
KODOWANIE W AUTOMATYCE
JĘZYKI PROGRAMOWANIA STEROWNIKÓW PLC
Języki tekstowe:
-listy instrukcji - język podobny do assemblera
-structural test - podobny do forttrana i pascala
Języki graficzne
-ladder diagram - modelowanie na przełącznikach schematycznych dla prawdziwych układów
-function block diagram - używa bloków które są bramkami logicznymi, w tej metodzie tworzymy układy z
bramek zamiast przełączników
-sequential function chart- metoda grafów sekwencyjnych, jest połączeniem powyższych metod w jedną, składa
się z kroków
PODSTAWOWE INSTRUKCJE W JĘZYKU LD
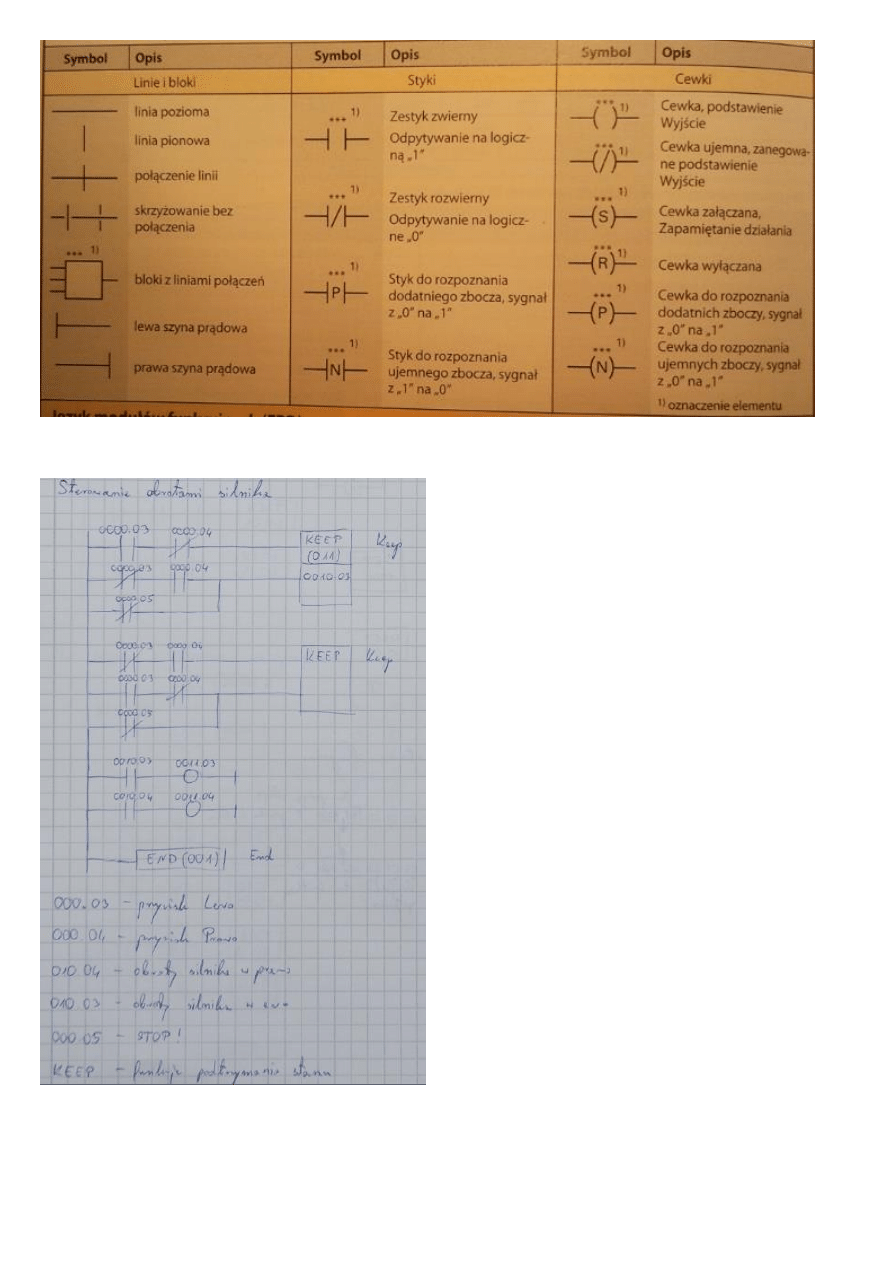
PROGRAM ZMIANY OBROTÓW SILNIKA
TIMER - OPIS Z PROGRAMEM
są to instrukcje do odmierzania czasu, kluczowym parametrem jest podstawa czasu - częstotliwość impulsów
podawanych na wyjściu - standard 0,1s
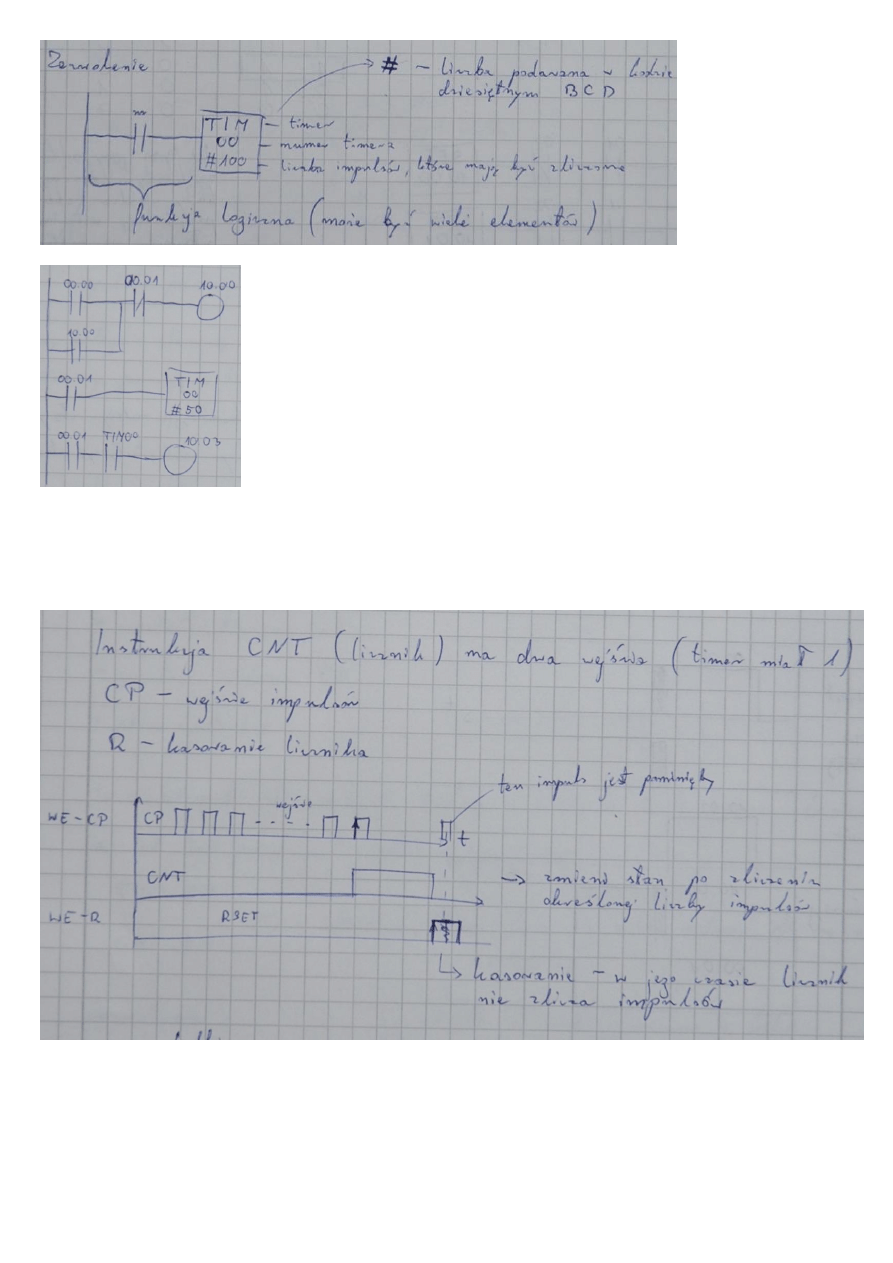
Przykład programu
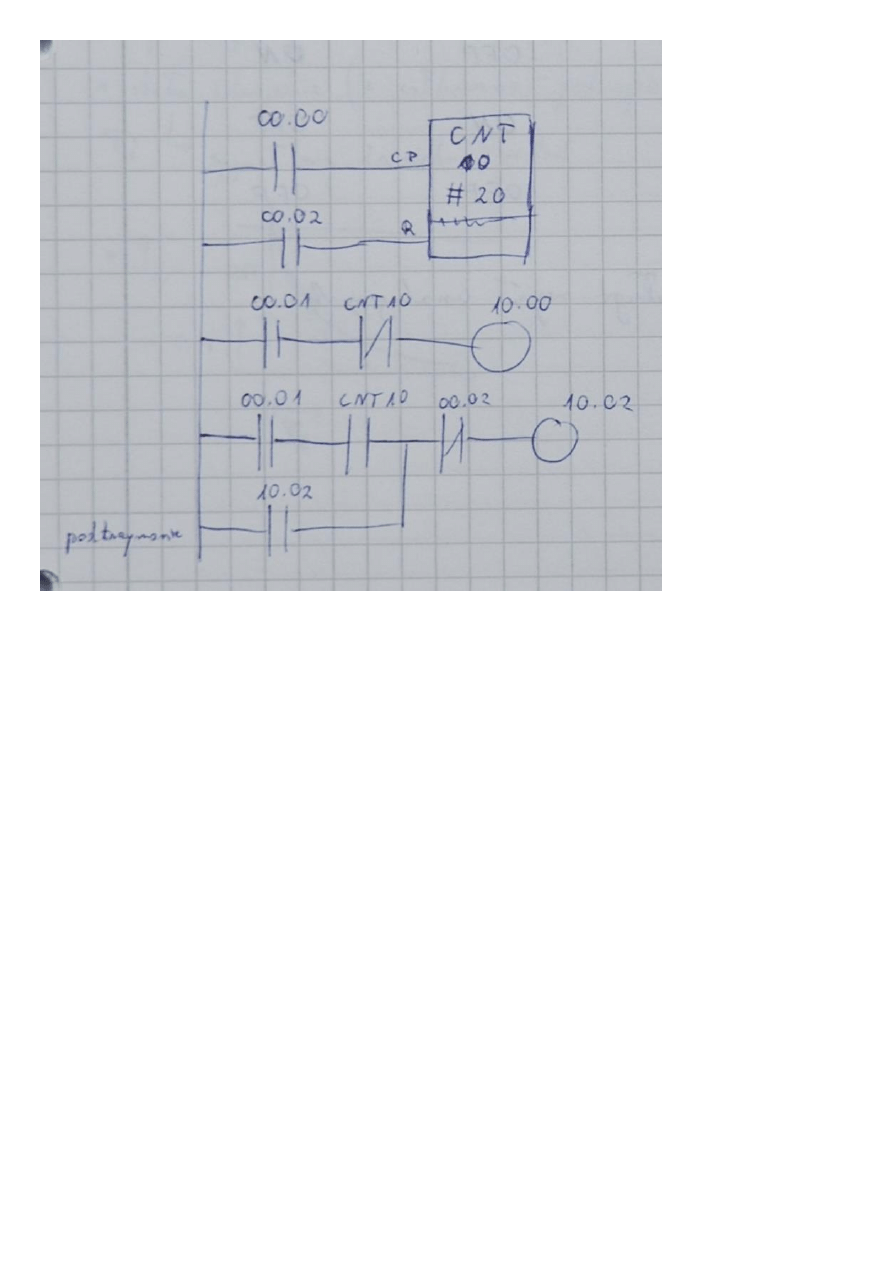
LICZNIK COUNTER - OPIS Z PROGRAMEM
Wyróżniamy 2 rodzaje liczników :
-pamiętające - czasy impulsów się sumują
-niepamiętające - jeśli sygnał na wyjściu trwa krócej niż zadany czas to wartość licznika ustawia się na nowo
PRZYKŁADOWY PROGRAM
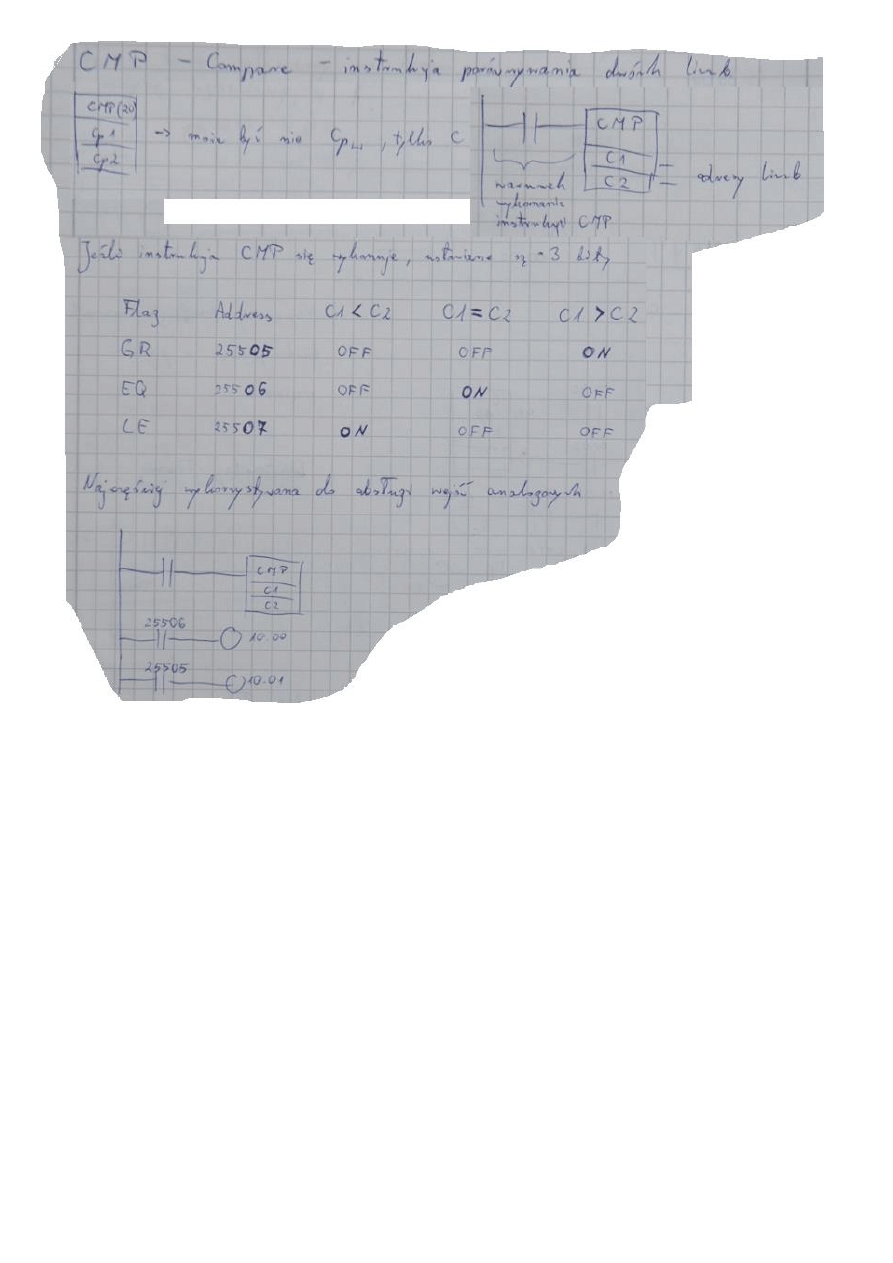
INSTRUKCJA CMP
PRZEKAŹNIKI
-stykowe lub półprzewodnikowe
Są to urządzenia łączeniowe sterowane zdalnie zwykle za pomocą przepływu prądu przez cewkę, która siłą
elektromagnetyczną powoduje przemieszczenie styków. Styki mogą być: zwierne, rozwierne, przełczne. W
trakcie załączania prąd początkowy może być do 50x większy od prądu ustalonego. Pełni rolę przekaznika z
poziomu z 24V na 220V, napięcia jednofazowego AC. 24V zasila cewkę przekaźnika, 230V jest na zestykach.
Zasila urządzenia o mocy do 2kW (10A)
Ważne paramtery to: trwałość, liczba styków, U i I cewki.
STYCZNIKI
Przekaźnik do włączania obwodów 3fazowych. (3 styki główne L1, L2,L3)
Są wykonane z napędem elektromagnesowym, przy czym zestyki główne są tak długo otwarte jak długo płynie
prąd przez cewkę elektromagnesu stycznika. Budowane są na prądy do 400A.
CZUJNIKI WIROPRĄDOWE
Stosowne są do precyzyjnych pomiarów odległości metalu od czoła czujnika. Wykorzystują prądy wirowe do
ucieczki energii kinetycznej. Mierzą ilość energii pobieranej przez czujnik i na tej podtsawie określają odległość.
Zakres 0,4-80mm, rozdzielczość 0,005%, dokładność pomiaru 0,2%
PRĄDNICA TACHOMETRYCZNA DC
Elektromaszyna do pomiaru prędkości.
Wyróżniamy 2 rodzaje prądnic ze wzbudzeniem obcym i ze wzbudzeniem magnesem trwałym. Niewskazane jest
stosowanie w nich szczotek węglowych ze względu na znaczne wartości napięcia przejścia Up między szczotką a
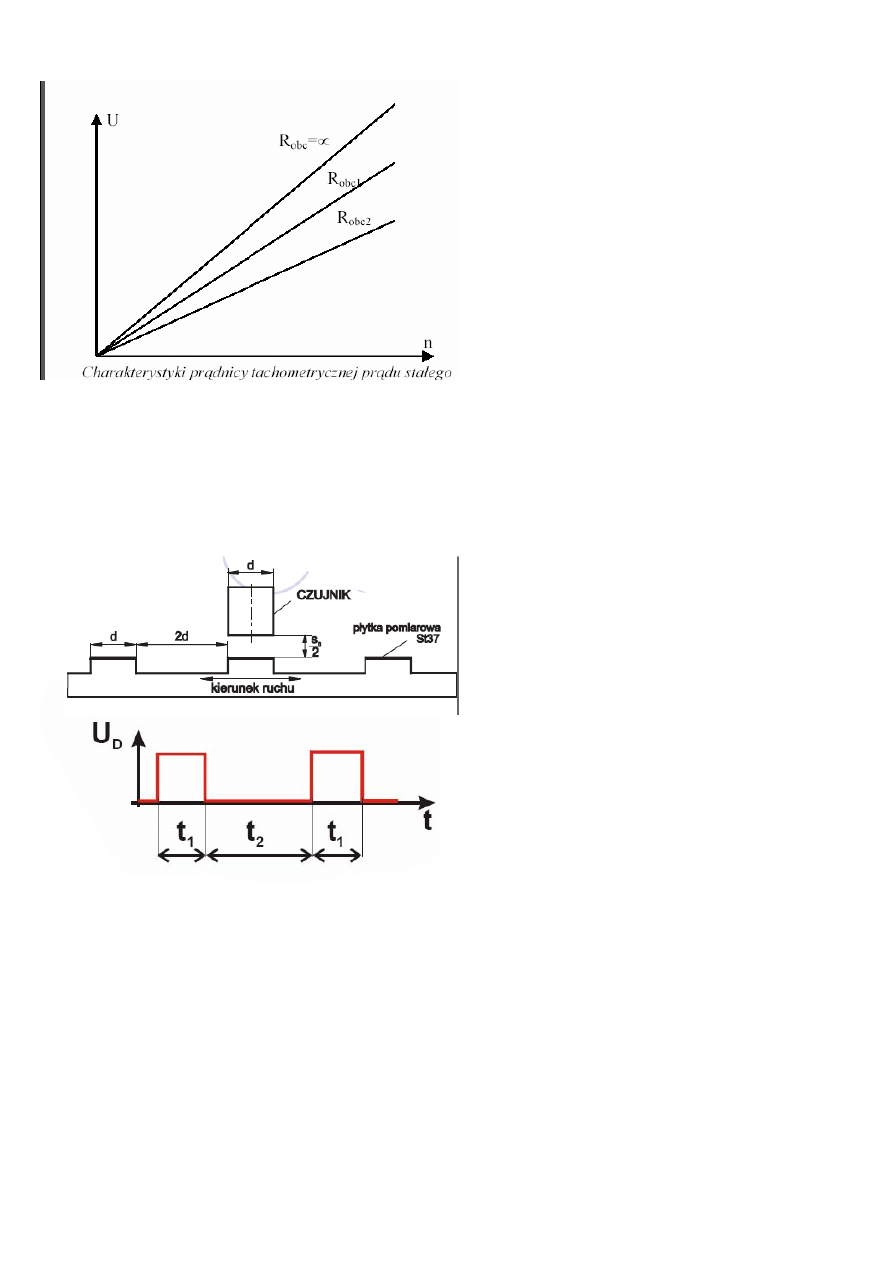
wycinkiem komutatora. Powoduje to przesunięcie charakterystyki wyjściowej i wprowadza w błąd nieliniowość
tej charakterystyki.
METODA IMPULSOWA POMIARU PRĘDKOŚCI OBROTOWEJ
W najprostszym przypadku transoptor szczelinowy + ponacinana tarcza
Czujnik indukcyjnościowy+ specjalne koło zebate ze stali.
Aby uzyskać maksymalną częstotliwość pracy czujnika to odległość między zębami = 2d (d-średnica czujnika,
szerokość zęba)
Do dużych prędkości stosujemy metodę ze stałym czasem pomiaru a do małych prędkości ze stałą liczbą
impulsów.
CZUJNIKI POJEMNOŚCIOWE, BUDOWA I ZASADA DZIAŁANIA
Powierzchnia elektrody oraz ekran tworzą okładziny kondensatora. Zbliżanie przedmiotu (metalowego lub
dielektryka) powoduje zmianę jego pojemność. Paramtery układu są dobrane tak, że oscylacja pojawia się w
yniku wzrostu pojemności, co zostaje wykryte przez komparator. Zastosowanie: rozpoznawanie przedmiotów na
linii, pomiar poziomu materiału w naczyniu. Zasięg podobny do idukcyjnego, cena zwykle wyższa.
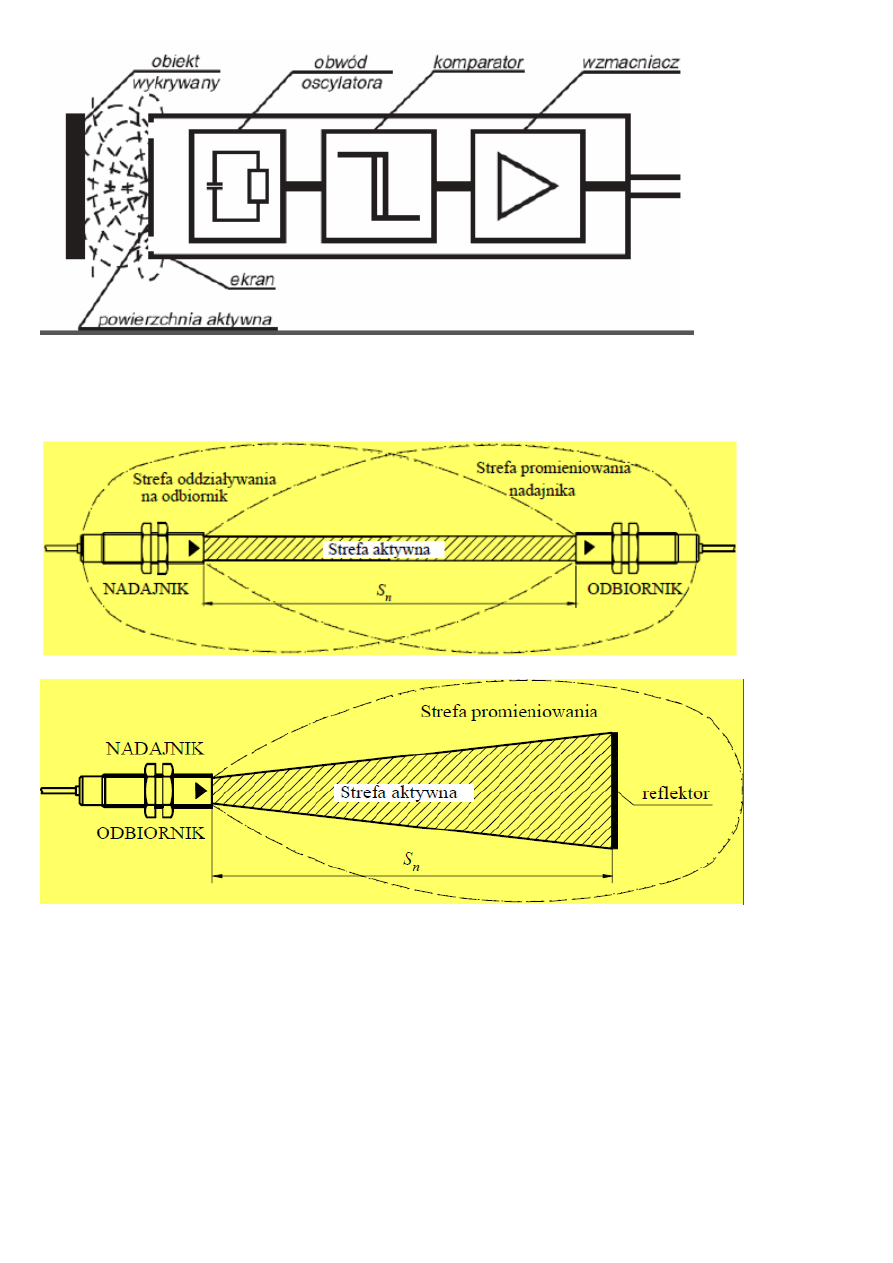
CZUJNIKI OPTYCZNE
Składają się z dwóch podstawowych elementów: nadajnika i odbiornika światła. Reaguja na zmianę natężenia
wiązki świetlnej. Posiadają wskaźnik stanu wyjścia. Możliwa jest regulacja zasięgu. Zasięg 20-30m.
W systemie refleksyjnym nadajnik i odbiornik są w tej samej obudowie.
Czujniki odbiciowe wykrywają jednakowo obiekty zarówno jasne jak i ciemne a ich strefa działania jest
precyzyjnie regulowana. Stosowane przy wykrywaniu asortymentu przemieszczającego się w pobliżu tła lub
podłoża, którego czujnik nie powinien wykrywać.
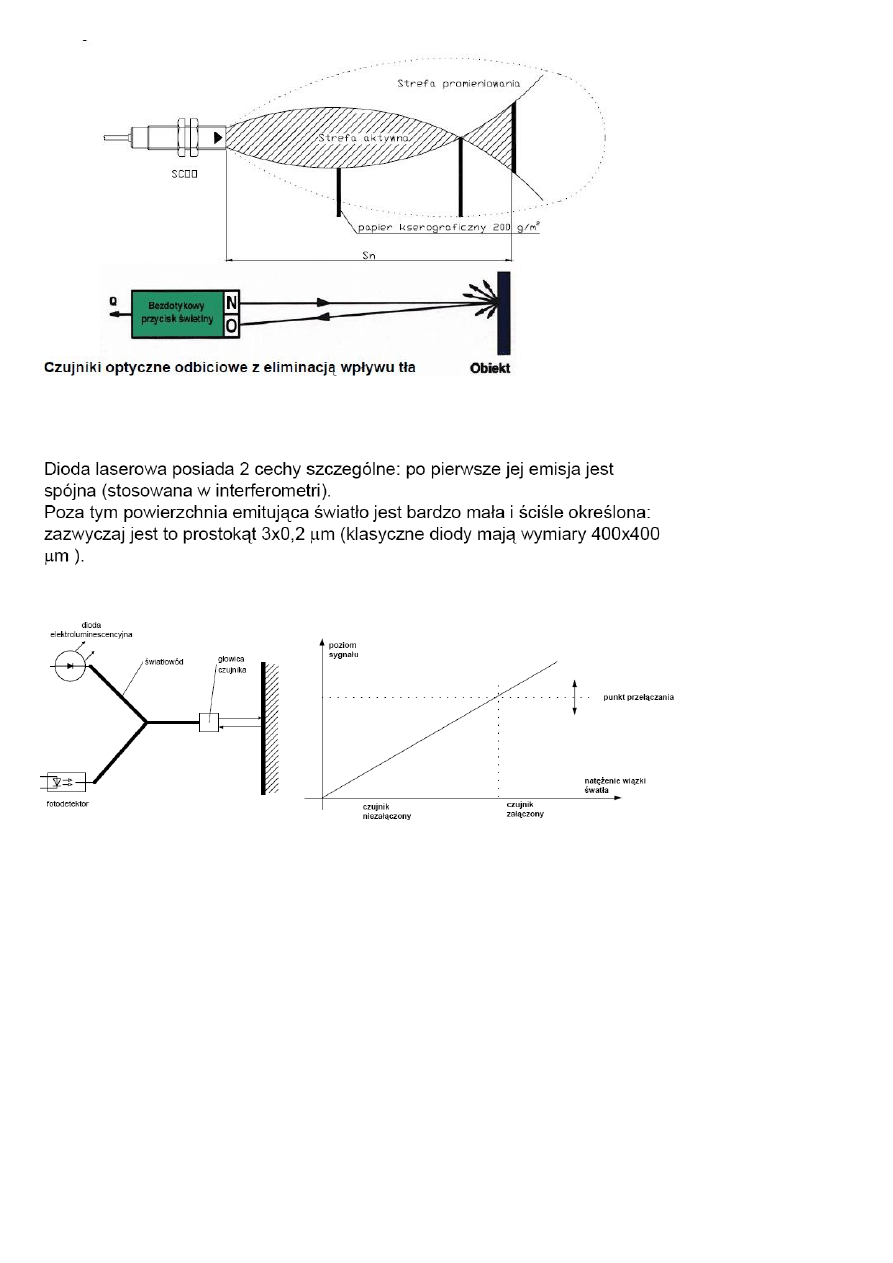
CZUJNIKI LASEROWE
Generuja wiązkę o bardzo małym przekroju. Duża strefa działania. Zaletą jest możliwość przesyłania wiązki
światłowodem co umożliwia montowanie głowicy czunika w miejscach niedostępnych.
CZUJNIKI ULTRADZWIĘKOWE
Wysyłają fale dzwiękowe powyżej pasma słyszalnego i odbierają ich odbicie. Wykorzystują pomiar zwłoki
czasowej i szybkość dźwięku w powietrzy do określenia odległości od obiektu. Prędkość rozchodzenia dzwięku
40m/s. Można je również wykorzystywać do sprawdzenia obecności obiektu. Duży zakreś odległości, do około
10m. Powierzchnia musi być prostopadła do czujnika inaczej echo nie wróci. Mała dokładność.
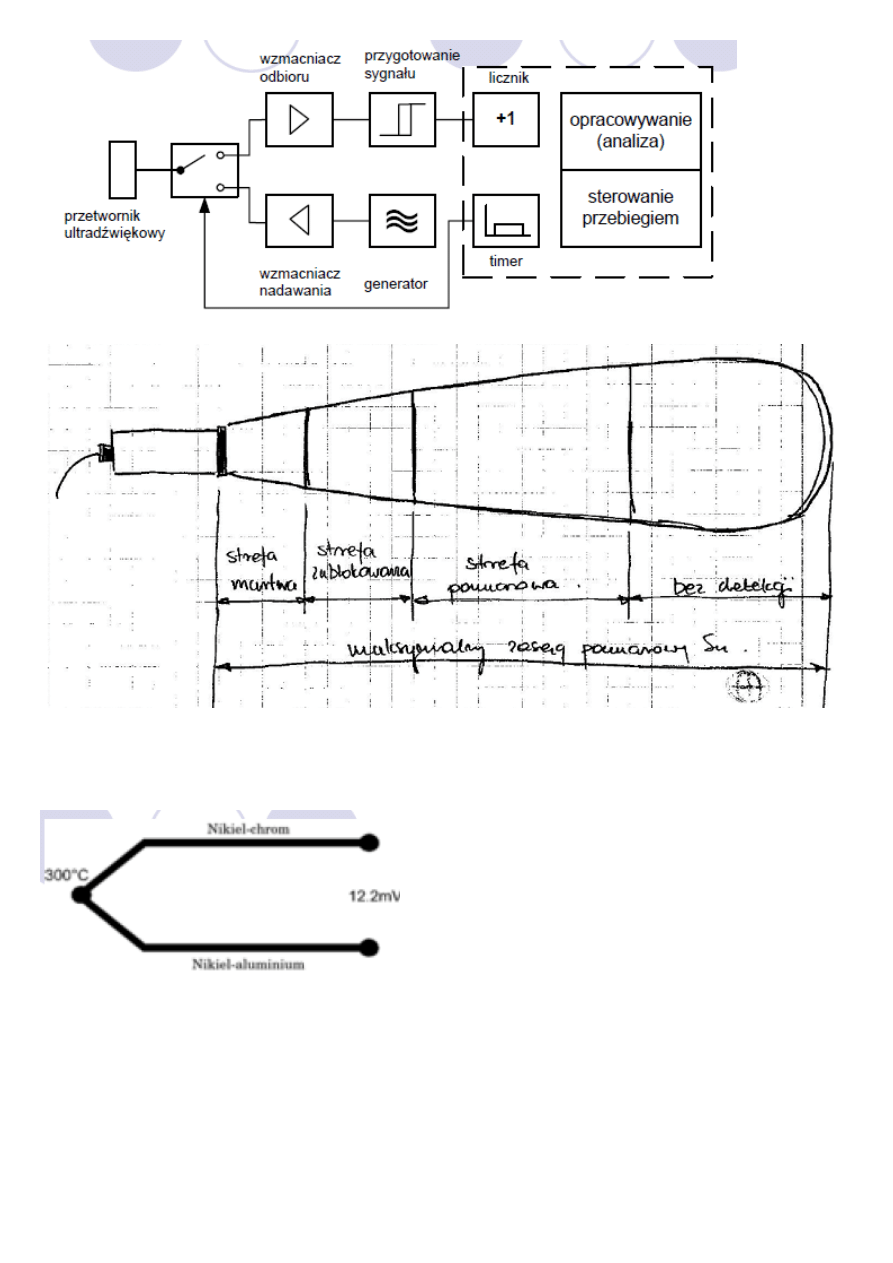
strefy detekcji
METODY POMIARU TEMPERATURY
-termopara - dwa metale zgrzane końcami (strona pomiarowa) wykorzystują zjawisko Seebecka polegające na
powstaniu zależnej od temperatury siły elektromotorycznej na styku dwóch różnych metali.
-termorezystory (Pt100, Pt1000)- zakres: platyna 220-850, nikiel 50-150stopni. Wzrost temp = wzrost rezystancji
(od 100 do 1000 omów). Rezystory drutowe składające się z cylindrycznego korpusu ceramicznego w którym jest
spirala uzwojenia oporowego zakończona wyprowadzeniami.
-termistory - półprzewodnik, którego rezystancja zależy od temp otoczenia. Zastosowanie: pomiar temp wody w
pralkach; w piecach, klimatyzatorach; w silnikach el.
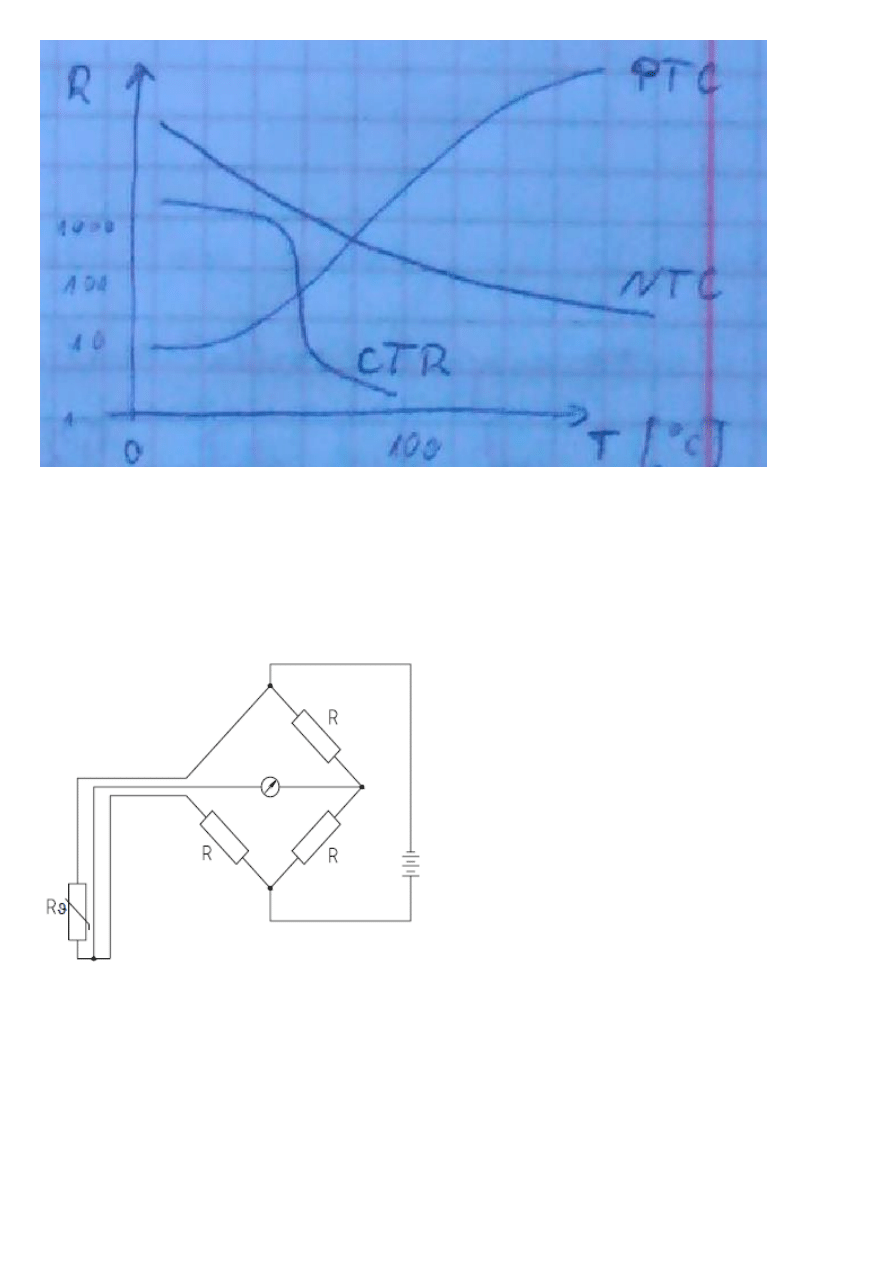
CZUJNIKI TENSOMETRYCZNE
Czujniki służące do pomiaru naprężeń. Pomiar tensometryczny polega na pomiarze odkształcenia i obliczenia
naprężenia w oparciu o przyjęty związek fizyczny , np. prawo Hooka. Wykorzystywany tkaże do pomiaru siły lub
cisnienia. Najczęściej sotoswane są tensometry oporowe (max odkształcenie ok 4%) - zmieniają rezystancję wraz
ze zmianą wymiarów. Ze względu na budowę dzielimy je na: wężykowe, zygzakowe, kratowe, foliowe,
półprzwodnikowe. Wadą jest wrażliwość na temperaturę.
Pomiar mostkowy
CZUJNIKI HALLA i ELEMENTY PIEZO
Zbudowany jest z płytki półprzewodnikowej zasilanej DC. Płytka musi byc=ć tak ustawiona aby pole było
prostopadłe do przepływu prądu I oraz płytki. Napięcie Halla U
H
= K I B . I=const.
Zastosowanie w silnikach sychronicznych do wykrywania położenia wirnika, do pomiaru przyspieszenia
czujnika.
Zjawisko piezo polega na tym, że kryształy piezoelektryczne generują ładunek w wyniku działania na kryształ
siłą. Wymagany jest wzmacniacz tego ładunku bo gdy nacisk ustąpi, ładunek zanika. Piezoelementy działaj
również odwrotnie, podając na nie napięcie możey uzyskać odkształcenie.
Wady: konieczność podawania wysokiego napięcia, niewielkie odkształcenia.
Zalety: wysoka częstotliwość pracy
Zastosowanie: zapalniczki, układy wtryskowe do samochodów
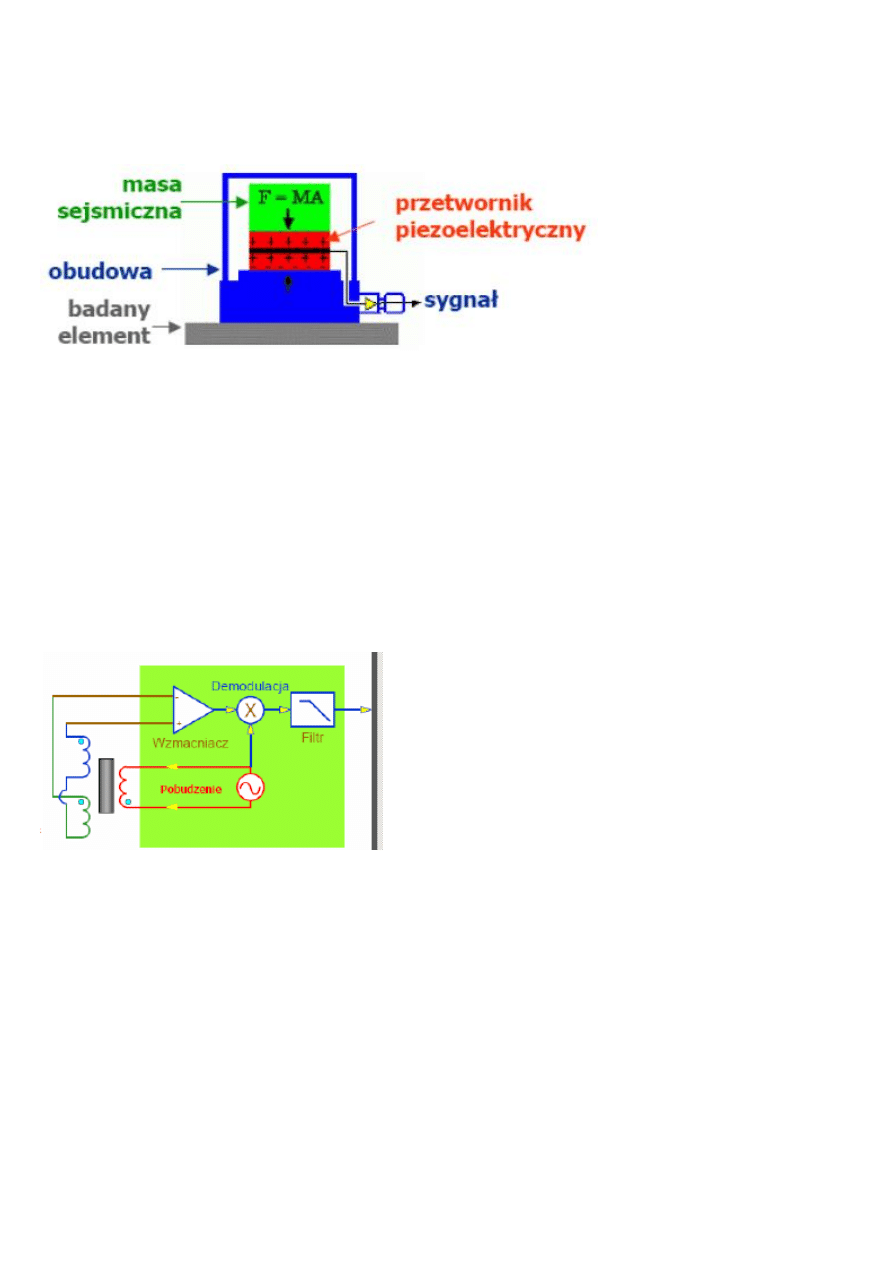
AKCELEROMETRY SCALONE
W układzie scalonym mamy układ mechaniczny, masę, tłumik, sprężynę i pomiar położenia masy. Stosowany do
pomiaru przyspieszenia czujnika. Produkowane w postaci układów scalonych. Najważniejsze zastosowanie -
podnoścniki powietrzne.
CZUJNIKI PIEZOELEKTRYCZNE
Działają na dwa sposoby:
-w wyniku zmiany wymiarów generowany jest ładunek-napięcia
-w wyniku przyłożenia napięciacia wymiary ulegają zmianie
Jako przetwornik jest zdolny do generowania b małych przemiszczeń w rezultacie podawani napięcia ale to
napięcie musi być rzędu kV.
Aby zwiekszyć efekt tworzym stosy w których każda płytka jest zasilana.
Płytki piezo działające jak bimetal. Największą zaletą jest duża częstotliwość działania.
CZUJNIKI TRANSFORMATOROWE
Uzwojenia wtó®ne nawinięte są w przeciwnych kierunkach. Uzwojenie pierwotne zasilane napięciem
sinusoidalnym. Wewnątrz rurki przemieszcza się ruchomy rdzeń ferromagnetyczny który tworzy sprzężenie
pomiędzy uzwojeniami. Zakres działania od 0,5 do 750mm. Z układem musi współpracować elektronika.
CZUJNIKI MAGNETOSTRYKCYJNE
Zmienia wymiary pod wpływem pola magnetycznego. Wewnątrz rurki umieszczony jest przewód przez który
przepuszcza się impuls prądowy który powoduje powstanie fali skrętnej która biegnie od początku do końca. Na
poczatku jest przetwornik piezo a na końcu tłumik. W rurce przemieszcza sie magnes trwały którego położenie
się mierzy. Mierzony jest czas lotu impulsu.
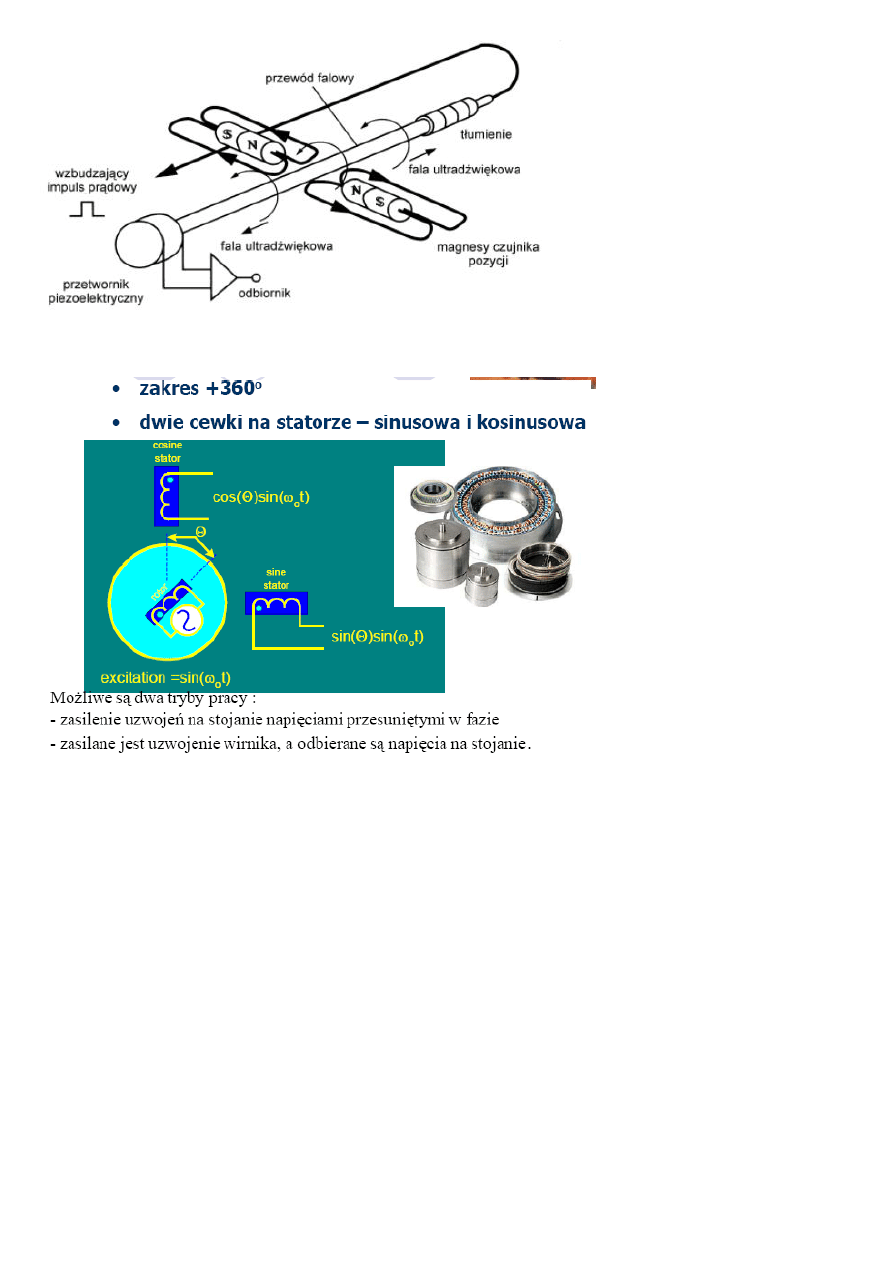
REZOLWER
Mierzy położenie wału
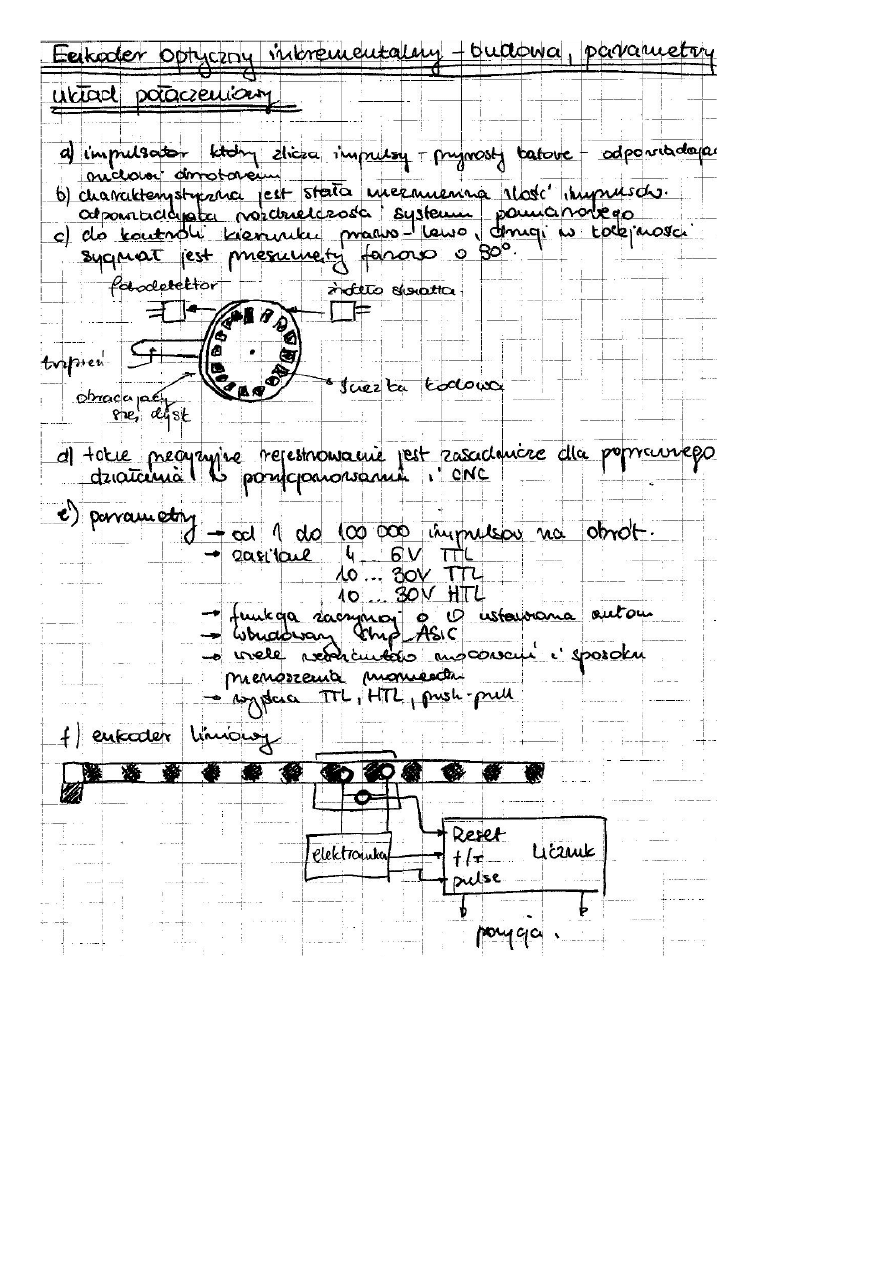
ENKODERY
Wyszukiwarka
Podobne podstrony:
automaty opracowane grup PA ,,PA itd
Pomiary i automatyka opracowanie Piopio
Automaty opracowanie
AUTOMATYKA OPRACOWANIE
Automatyka Opracowane zagadnienia
AUTOMATY opracowanie, Semestr IV, Wspólne, Podstawy automatyki
automatyka-opracownie v0.8, mechatronika, II rok, automatyka
Opracowanie 8 dobre OgarnijTemat com
Automatyzacja opracowanie slajdów
automaty opracowane grup PA ,,PA itd
opracowanie pytan Automatyka
opracowanie2, Automatyka i robotyka
Próba opracowania automatyka
więcej podobnych podstron