
POLITECHNIKA ŚWIĘTOKRZYSKA
w Kielcach
WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN
ZAKŁAD MECHATRONIKI
LABORATORIUM PODSTAW AUTOMATYKI
INSTRUKCJA
ĆWICZENIE LABORATORYJNE NR 1
Temat: Badania symulacyjne podstawowych członów automatyki
(wyznaczanie odpowiedzi na wymuszenie skokowe). Zapoznanie się z
programem Matlab-Simulink. cz.1
Opracował:
dr inż. Paweł Łaski
Kielce 2006
Zasady pracy w Simulinku
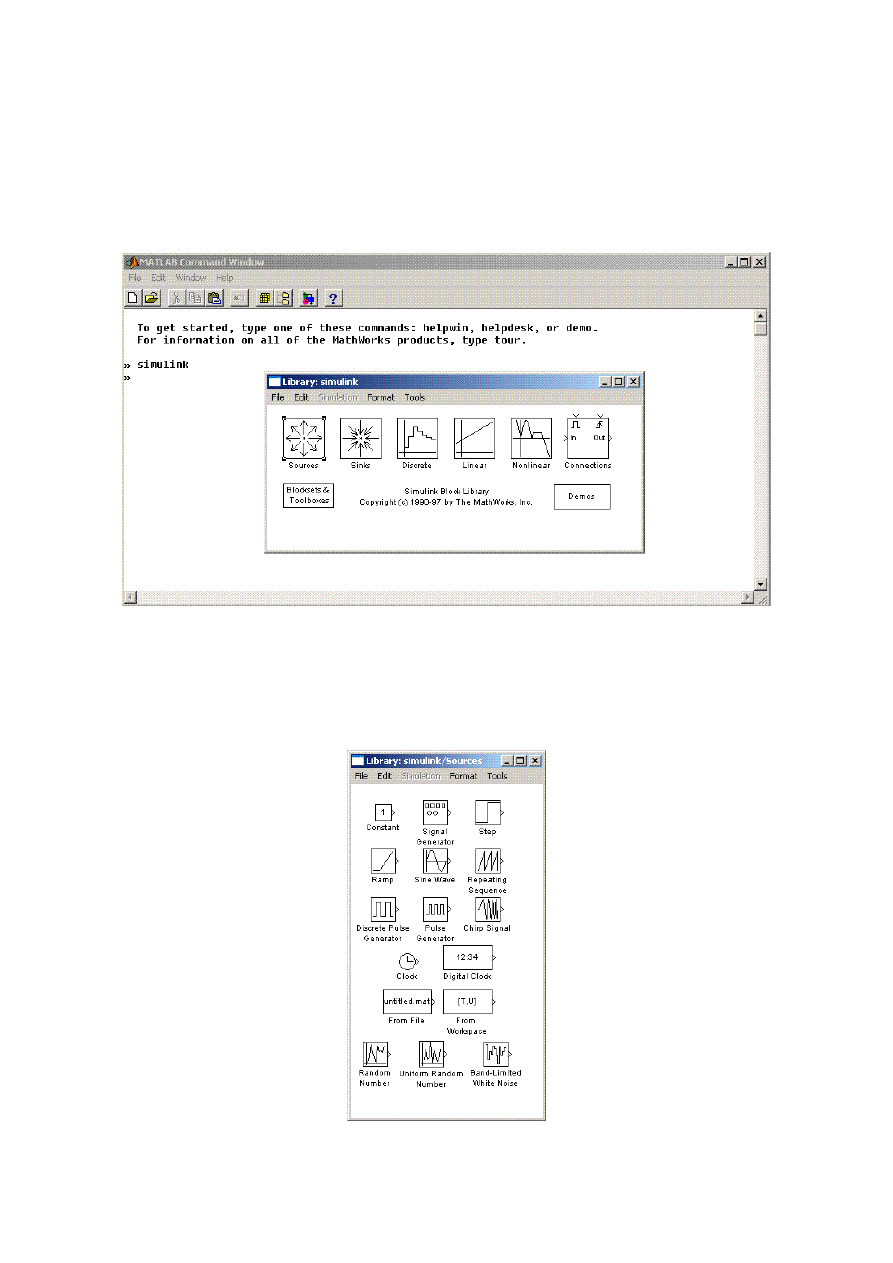
Pracę z Simulinkiem można rozpocząć z okna poleceń Matlaba podając komendę:
» simulink
Wykonanie tego polecenia powoduje pojawienie się okna z tytułem simulink, którego
zawartość przedstawia rysunek:
Okno Simulinka
Okno to zawiera następujące biblioteki programowe:
Sources - bloki do generowania różnych sygnałów. Bloki tej biblioteki posiadają tylko
sygnały wyjściowe. Jej zawartość ilustruje rysunek.
Bloki biblioteki Sources
Funkcje realizowane przez poszczególne bloki:
• Clock - podaje czas symulacji i wyprowadza go jako zmienną;
• Signal Generator - generator sygnałowy fali sinusoidalnej, prostokątnej, pół-kształtnej
i przebiegu losowego;
• Sine Wave - generator fali sinusoidalnej;
• From File - odczyt danych z mat-pliku;
• Random Number - generator szumu białego z rozkładem Gaussa;
• Digital Clock - zegar cyfrowy;
• Constant - zadaje wartość stałą niezależną od czasu;
• Step Input - sygnał skoku jednostkowego;
• From Workspace - pobiera dane z przestrzeni roboczych;
• Band-Limited White Noise - generator szumu białego z ograniczonym pasmem;
• Repeating Sequence - generator dowolnego sygnału o zadanym okresie powtarzania;
• Pulse Generator - generator fali prostokątnej;
• Chirp Signal - generator sygnału z liniową rosnącą częstotliwością.
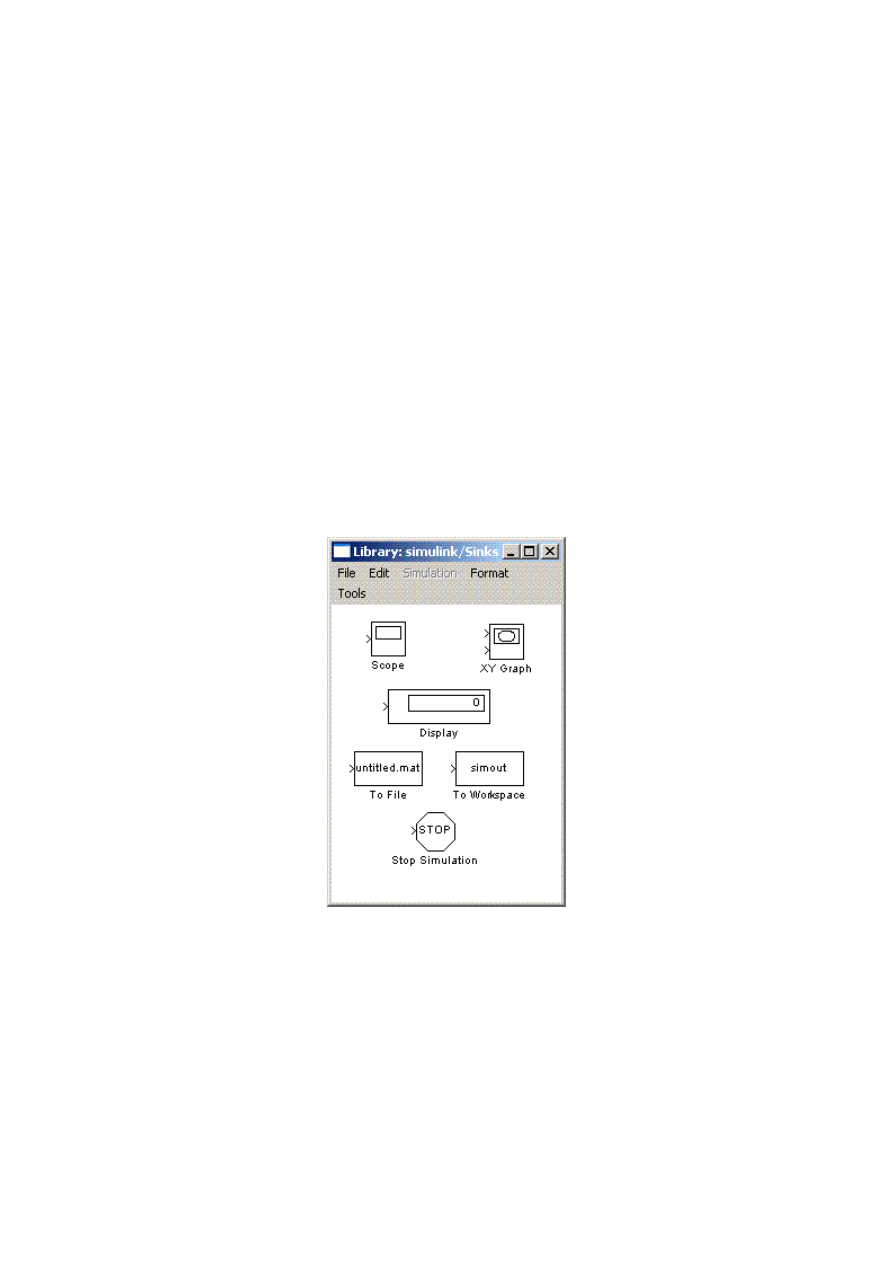
Sinks zawiera bloki przeznaczone do wizualizacji wyników, a także do sterowania
przebiegiem symulacji. Rodzaje bloków występujących w tej bibliotece ilustruje rysunek.
Bloki biblioteki Sinks
Bloki umieszczone w bibliotece Sinks zawierają jedynie wejścia i realizują następujące
funkcje:
• Scope - „oscyloskop";
• Graph - okno graficzne Matlaba do wykresów czasowych;
• Auto-Scale Graph - okno graficzne z automatycznym przesuwaniem skali;
• XY Graph - okno graficzne Matlaba do wykonywania wykresów XY;
• To Workspace - przesyła przebiegi czasowe do przestrzeni roboczej programu Matlab;
• To File - zapamiętuje przebiegi czasowe w mat-pliku;
• Stop Simulation - zatrzymuje symulację;
• Hit Crossing - automatycznie zwiększa dokładność obliczeń w otoczeniu punktów
nieciągłości.
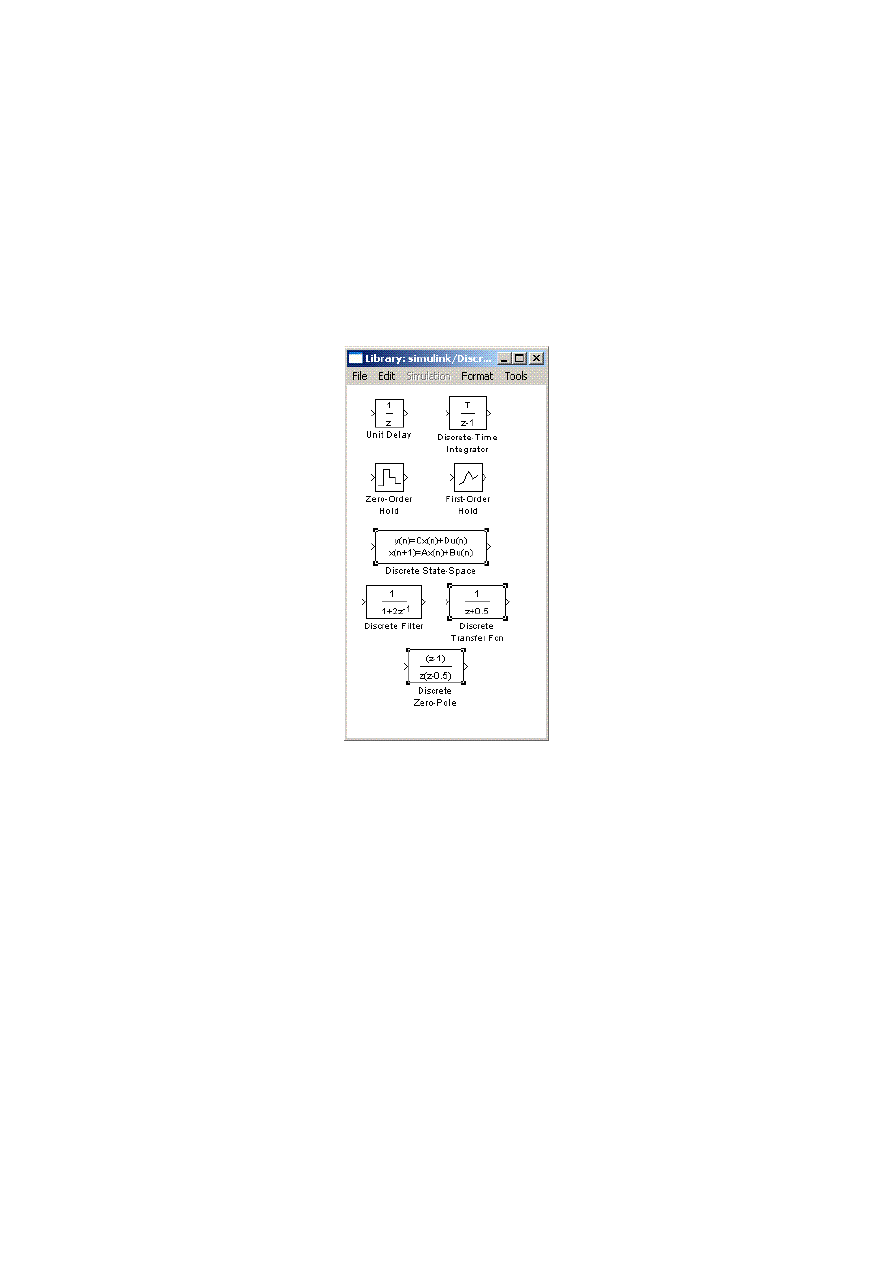
Discrete - biblioteka bloków dyskretnych. Każdy z tych bloków zawiera na wejściu
impulsator oraz ekstrapolator zerowego rzędu (zero-order hołd) na wyjściu. Czas
próbkowania może być określony oddzielnie dla każdego bloku. Podaje się go w polu okna
dialogowego danego bloku. Wartości wyjściowe bloków dyskretnych są aktualizowane tylko
w momentach czasu t
odpowiadających całkowitej wielokrotności czasu
próbkowania T
s
(t=nT). Czas próbkowania T
s
może być wartością skalarną lub wektorową.
Bloki umieszczone w bibliotece Discrete realizują następujące funkcje:
Bloki biblioteki Discrete
• Unit Delay - opóźnienie sygnału wyjściowego (o jeden cykl okresu próbkowania);
• Discrete Zero-Pole - transmitancja dyskretna; dla zdefiniowania tej transmi-tancji
należy podać wartości zer, biegunów i współczynnik wzmocnienia;
• Filter - transmitancja filtru dyskretnego; jest określona wektorami współczynników
licznika i mianownika; współczynniki są podawane według malejących potęg
operatora l/z;
• Discrete Transfer Fen - transmitancja dyskretna opisana przez podanie wektorów
współczynników licznika i mianownika uszeregowanych według malejących potęg
operatora z;
• Discrete State-Space - model układu zapisany w postaci dyskretnego równania stanu i
wyjścia;
• Zero-Order Hołd, First-Order Hołd - ekstrapolatory odpowiednio zerowego i
pierwszego rzędu;
• Discrete-Time Integrator - dyskretny element całkujący;
• Discrete-Time Limited Integrator - element całkujący dyskretny z ograniczeniem
sygnału wyjściowego w zadanym zakresie.
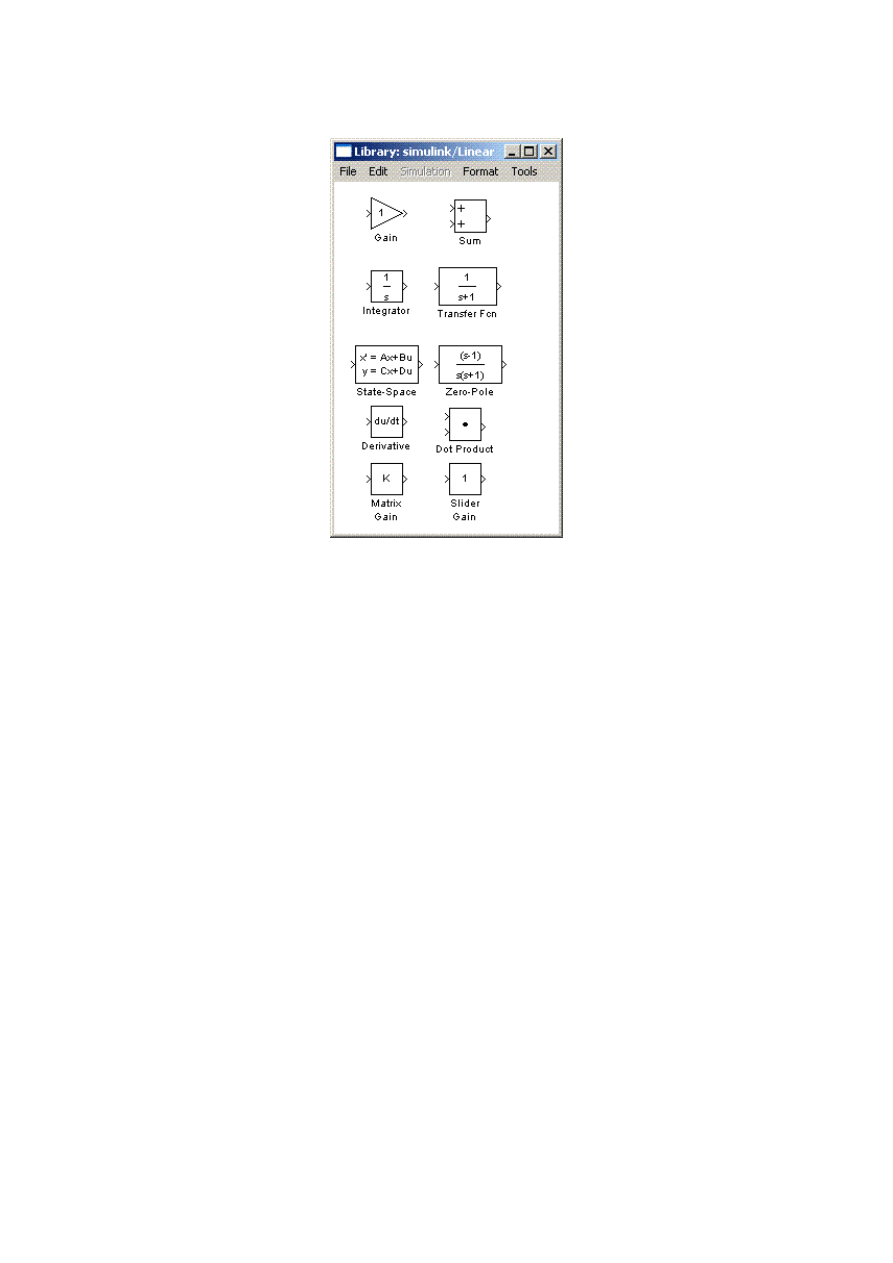
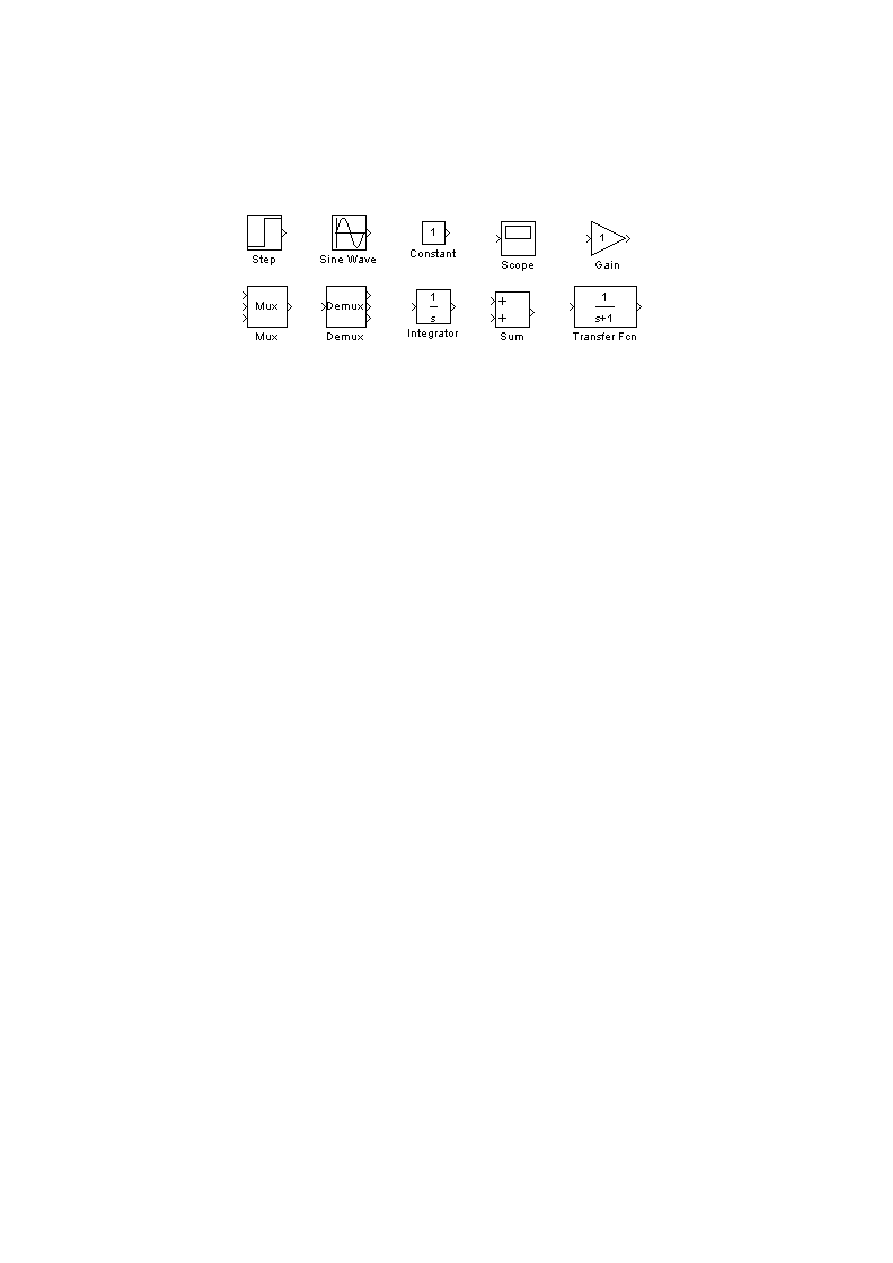
Linear jest biblioteką bloków liniowych, której zawartość przedstawia rysunek:
Bloki biblioteki Linear
Biblioteka ta zawiera bloki:
• Sum - element sumujący; liczbę i rodzaj znaków (+-) określa użytkownik;
• Inner Product - iloczyn skalarny wektorów wejściowych;
• Integrator - element całkujący;
• Derivative - element różniczkujący;
• Gain - element wzmacniający (wyjście = Gain * wejście);
• Matrix Gain - macierzowy element całkujący;
• Slider Gain - wzmacniacz z nastawianiem wzmocnienia za pomocą suwaka;
• Transfer Fcn - transmitancja ciągła; dla określenia jej należy podać wektor
współczynników wielomianów licznika i mianownika; współczynniki są podawane w
kolejności malejących potęg s;
• Zero-Pole - transmitancja ciągła określona przez podanie biegunów, zer oraz
współczynnika wzmocnienia;
• State-Space - równanie stanu i wyjścia modelu ciągłego. Należy podać macierze A, B,
C, D oraz warunki początkowe.
Nonlinear zawiera bibliotekę bloków nieliniowych. Jej zawartość przedstawia rysunek:
W bibliotece tej występują bloki:
• Sign - realizuje zależność y = sign(x);
• Relay - przekaźnik dwupołożeniowy; należy podać: wartość, przy której zachodzi
załączenie i wyłączenie oraz wartość, jaka wystąpi na wyjściu po włączeniu i
wyłączeniu;
• Backlash - strefa histerezy;
• Saturation - element typu nasycenie; powoduje ograniczenie sygnału wyjściowego w
określonym zakresie;
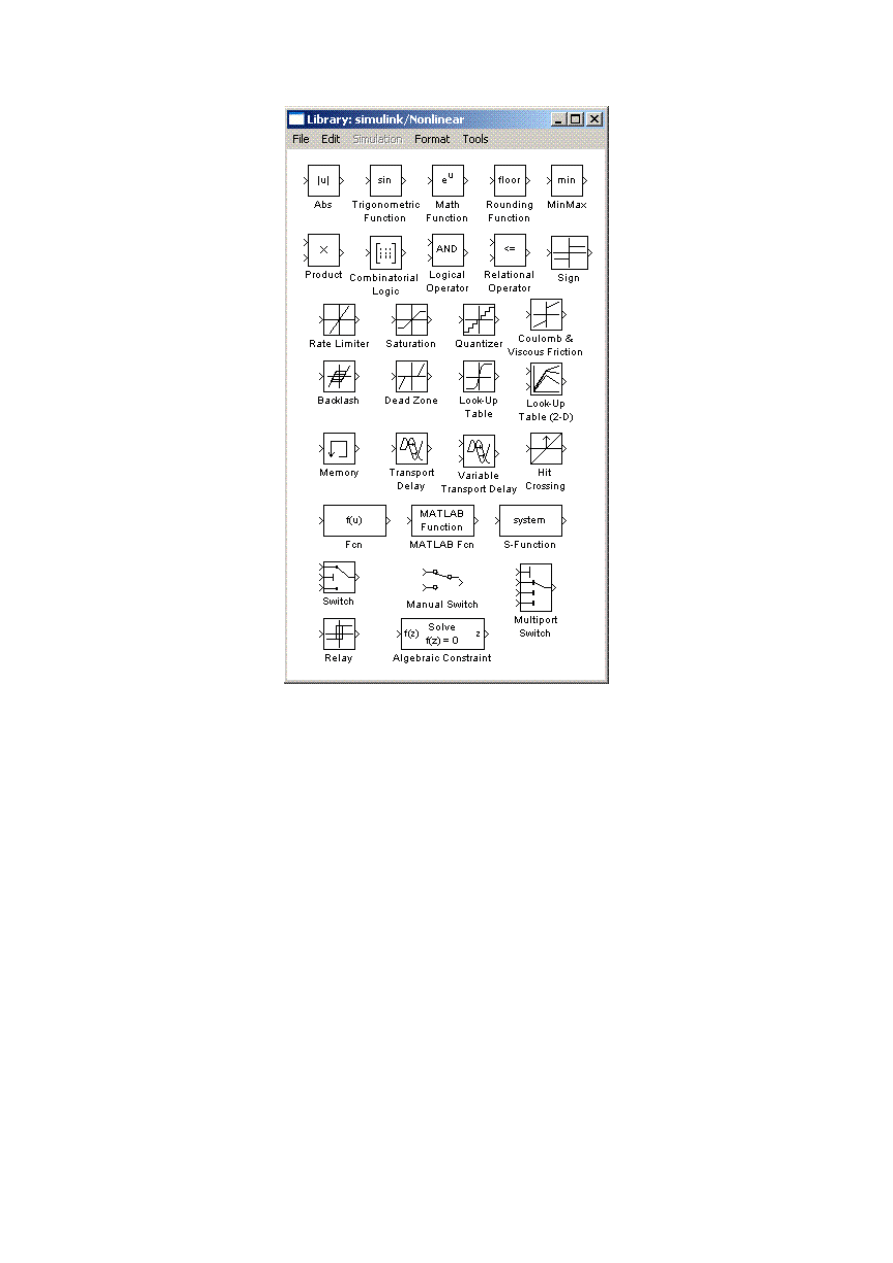
Bloki biblioteki Nonlinear
• Quantizer - przekształca sygnał wejściowy w funkcję schodkową; wymaga podania
wartości przedziału kwantyzacji;
• Dead Zone - element typu strefa nieczułości; należy podać początkową i końcową
wartość strefy nieczułości;
• Coulombic Friction - element typu tarcie kulombowskie; realizuje zależność y =
sign(x) * (Gain * abs(x) + offset); w celu zdefiniowania elementu należy podać dwa
parametry: Gain i offset;
• Rate Limiter - ogranicznik szybkości zmian sygnału; należy podać współczynnik
nachylenia prostej dla dodatnich i ujemnych wartości sygnału wejściowego;
• Product - iloczyn wartości wejściowych; użytkownik musi podać liczbę wejść;
• Abs - wartość bezwzględna sygnału wejściowego (y = I u |);
• Look Up Table - określa funkcję odcinkowo-liniową na podstawie zadanej tablicy
(look up table);
• 2-D Look-Up Table - dwuwymiarowa tablica zależności;
• Relational Operator - operator relacji: <,<=,>=, = = , ~ = ;
• Logical Operator - realizuje operację logiczną na wartościach wejściowych.
Użytkownik podaje nazwę operatora logicznego (AND, OR, NAND, NOR, XOR,
NOT) oraz liczbę wejść;
• Combinatorial Logic - tablica logiki kombinatorycznej (tzw. tablica prawdy, tnie
table);
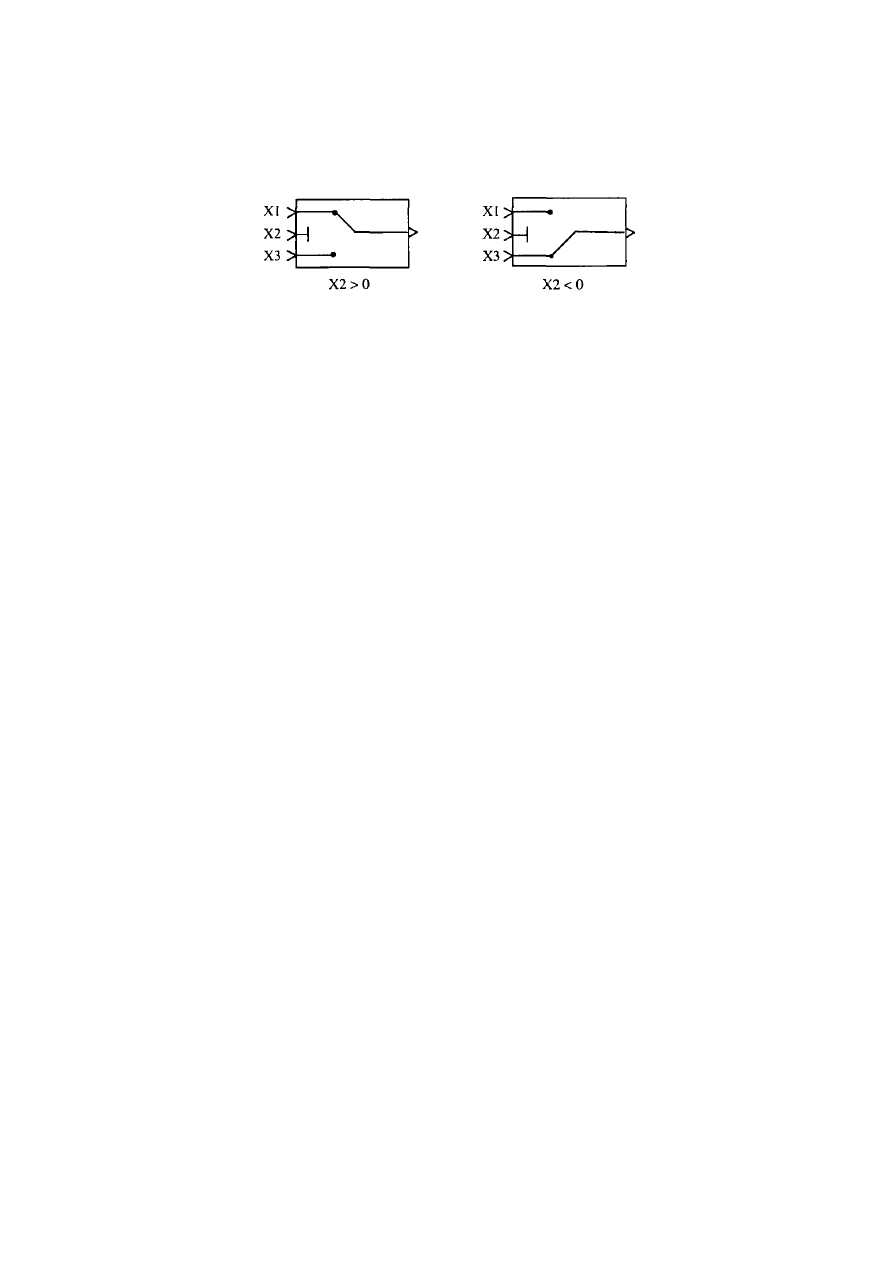
• Switch - służy do przełączania sygnałów wejściowych. Działanie bloku ilustrują
rysunki:
gdzie Xl, X3 są sygnałami wejściowymi, a X2 jest sygnałem sterującym;
• Fen - blok wyrażenia definiowanego przez użytkownika. Jako nazwę zmiennej
wejściowej należy używać u, np. cos(«[l]*exp(3.2-M[2]));
• S-Function - tzw. funkcja systemowa. Definicją S-funkcji może być schemat graficzny
utworzony w Simulinku, m- lub mex-plik. Nazwę S-funkcji podaje się w oknie
dialogowym (podobnie jak inne parametry);
• MATLAB Fen - blok zwracający funkcję Matlaba. Funkcja może być również
zdefiniowana w m-pliku funkcyjnym, którego nazwę podaje się w oknie dialogowym;
• Reset Integrator - blok całkujący z resetowaniem. Jego działanie polega na tym, że
zachodzi całkowanie sygnału z pierwszego wejścia (gdy na wejściu drugim jest sygnał
zero). Kiedy wejście 2 jest niezerowe, zachodzi przełączenie na wejście trzecie;
• Memory - blok używany do usuwania pętli algebraicznych. Jest wykorzystywany
łącznie z blokiem Clock dla określenia kroku całkowania poprzez spowodowanie
opóźnienia o jeden krok całkowania. W oknie dialogowym należy podać warunek
początkowy;
• Transport Delay - blok realizujący tzw. „czyste" opóźnienie. Należy podać trzy
parametry: początkową wartość odliczania czasu opóźnienia, czas trwania opóźnienia
i wielkość bufora startowego;
• Variable Transport Delay - blok zmiennego opóźnienia transportowego. Definicja
bloku wymaga podania maksymalnej wartości czasu opóźnienia, początkowej
wartości odliczania czasu oraz rozmiaru bufora. Sygnał na drugim wejściu reguluje
wartość czasu opóźnienia;
• Limited Integrator - integrator z ograniczeniem górnej (Upper bound) i dolnej (Lower
bound) granicy całkowania. Wartości te wprowadzane są przez użytkownika,
podobnie jak warunek początkowy. Dostępny jest rozmaskowany schemat tego bloku.
Connections zawiera bibliotekę połączeń. Należą do niej:
• Inport - port wejściowy; służy do wprowadzania zewnętrznych sygnałów wejściowych
do podsystemu;
• Outport - port wyjściowy; służy do wyprowadzania sygnałów wyjściowych
podsystemu do bloków zewnętrznych;
• Mux - dokonuje przekształcenia skalarnych sygnałów wejściowych w sygnał
wektorowy. Użytkownik podaje liczbę wejść;
• Demux - demultiplekser; dokonuje przekształcenia sygnału wektorowego na sygnały
skalarne. Użytkownik podaje liczbę wyjść.
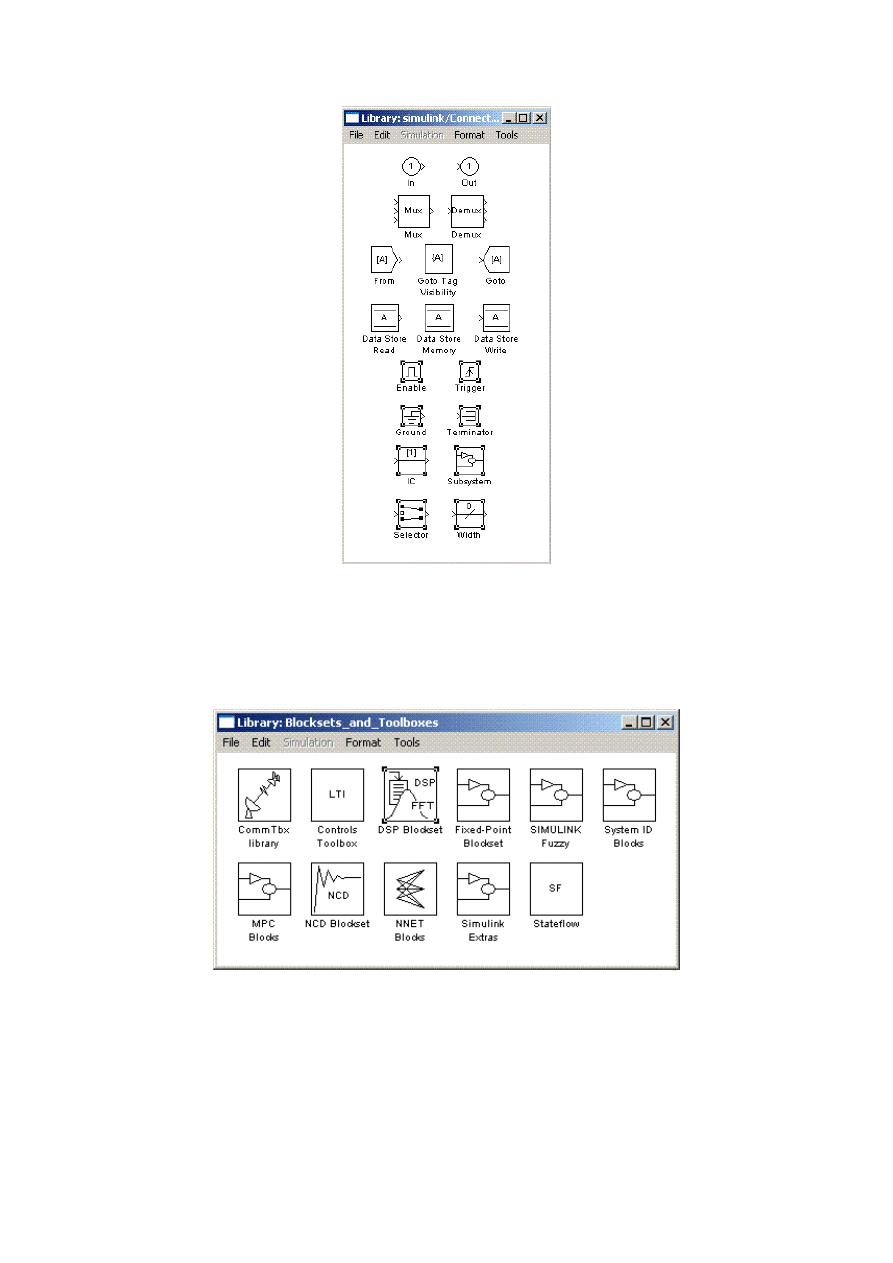
Bloki biblioteki Connections
Extras zawiera dodatkowe biblioteki.
Biblioteka Demos zawiera dodatkowe toolbox-y jako rozszerzenia możliwości pakietu
SIMULINK.
Tworzenie modelu graficznego w Simulinku
Definiowanie nowego modelu w formie schematu blokowego (graficznie) odbywa się
po wywołaniu programu Simulink z okna poleceń Matlaba (MATLAB Command Window),
wyborze z menu File i opcji New. Powoduje to otwarcie nowego okna dla tego modelu, a
następnie umieszczenie w nim ikon bloków zawartych w bibliotekach Simulinka i połączenie
tych bloków liniami reprezentującymi ich wzajemne powiązania.
Konstruowanie modelu odbywa się w tzw. edytorze graficznym Simulinka, do którego
przenoszone są ikony bloków zawartych w bibliotekach standardowych lub własnych. Każdy
blok posiada swój symbol graficzny - ikonę. Przykłady standardowych i własnych ikon
bloków przedstawia rysunek:
Przykłady różnych ikon występujących w Simulinku
Maskowanie bloku umożliwia zmianę ikony bloku (oraz zawartości jego okna dialogowego).
Każdy blok ma unikalną (w danym modelu) nazwę, którą można edytować i zmieniać po
wskazaniu i kliknięciu jej pola kursorem myszy. Nazwa bloku jest umieszczona na zewnątrz
jego symbolu graficznego. Usytuowanie nazwy zależy od orientacji bloku.
Położenie nazwy bloku w zależności od orientacji bloku
Bloki mogą mieć wejścia (>) i wyjścia (>), a każdy blok ma swoje okienko dialogowe, które
otwiera się po wskazaniu ikony bloku kursorem myszy i podwójnym kliknięciu jej lewym
klawiszem. Wybór przycisku Help otwiera okienko pomocy dla danego bloku.
Działania na blokach w Simulinku
Na blokach mogą być wykonywane takie operacje, jak:
• zmiana położenia
• zmiana rozmiaru
• kopiowanie bloku
• usuwanie bloku.
Każda czynność wykonywana na bloku (blokach) powinna być poprzedzona wyborem bloku
(bloków). Wybór ten jest realizowany w następujący sposób:
• wybór jednego bloku lub napisu - wskazanie bloku lub napisu kursorem myszy i
jednokrotne kliknięcie lewym klawiszem;
• wybór fragmentu modelu - ustawić kursor myszy w lewym górnym rogu obszaru, na
którym znajduje się określony fragment modelu, a następnie wcisnąć lewy klawisz
myszy i trzymając go przeciągnąć kursor do dolnego prawego rogu zaznaczonego
fragmentu.
Dwa oddalone od siebie elementy schematu można zaznaczyć też w ten sposób, ale po
wskazaniu każdego z elementów należy kliknąć jednocześnie lewym i prawym klawiszem
myszy;
• wybór wszystkich elementów modelu - należy wykonać polecenie
Edit|Select All w oknie Simulinka.
• Zaznaczony blok lub zestaw bloków może być:
• usunięty przez naciśnięcie klawisza Del (lub przez wybór z menu okna Simulink
Edit|Clear);
• usunięty z jednoczesnym przekopiowaniem do pamięci podręcznej przez wybór Edit |
Cut z menu okna Simulink;
• przekopiowany do pamięci podręcznej poprzez wybór Edit|Copy z menu okna
Simulink. Zawartość pamięci podręcznej może być przekopiowana do okna
graficznego Matlaba w miejsce wskazane kursorem myszy, poprzez wybór Edit |
Paste.
• przesunięty w obrębie okna jednego modelu lub przekopiowany do innego okna; jest
tu wykorzystana tzw. technika ciągnij i upuść, która jak wiadomo polega na tym, że
należy wskazać zaznaczony element kursorem myszy, wcisnąć jej lewy klawisz i
trzymając go przesunąć zaznaczony element w nowe miejsce (w obrębie tego samego
okna). Jeśli przemieszczenie przeprowadza się w obrębie dwóch różnych okien, to
zachodzi kopiowanie zaznaczonego (wybranego) elementu;
• przekopiowany w obrębie jednego okna modelu również przez wykorzystanie techniki
ciągnij i upuść, ale przy dodatkowo wciśniętym klawiszu Ctrl podczas trwania tej
operacji.
W zaznaczonym bloku można zmieniać jego rozmiary przez wskazanie kursorem myszy
wybranego wierzchołka, wciśnięcie lewego klawisza myszy, a następnie zmianę wymiarów.
Zmiana kroju, wielkości i koloru czcionek napisów, koloru tła, symbolu graficznego bloku
(np. z cieniowaniem lub bez) odbywa się po wyborze odpowiedniej opcji z menu Style w
oknie Simulink.
Tworzenie połączeń między blokami
Połączenia między blokami wykonuje się za pomocą myszy. Po wskazaniu początku
połączenia należy wcisnąć i przytrzymać lewy klawisz myszy, a następnie rozpocząć
ciągnięcie linii (przez ruch myszą) do punktu końcowego. W przypadku gdy połączenie jest
już wykonane, ale trzeba wykonać na nim dodatkowe odgałęzienie, należy wcisnąć prawy
klawisz myszy i rozpocząć rysowanie linii. Jednoczesne naciśnięcie prawego i lewego
przycisku myszy prowadzi do utworzenia nowego wierzchołka we wskazanym punkcie.
Przemieszczanie bloków powoduje zachowanie ciągłości połączeń (z wyjątkiem przypadku,
kiedy przesuwanie zachodzi przy jednoczesnym wciśnięciu lewego i prawego klawisza
myszy). Połączenia między blokami można usuwać. W tym celu należy zaznaczyć dane
połączenie przez kliknięcie na nim lewym klawiszem myszy, a następnie usunąć je przez
naciśnięcie klawisza Del lub wybór opcji Clear z menu Edit w oknie Simulink (Edit|CIear).
Cel Ćwiczenia
Wyznaczyć:
1. Odpowiedź skokową.
2. Charakterystykę amplitudowo częstotliwościową.
3. Charakterystykę fazowo częstotliwościową.
4. Charakterystykę amplitudowo fazową (wykres Nyquista).
5. Składowe rzeczywistą i urojoną transmitancji.
6. Logarytmiczną charakterystykę amplitudowo częstotliwościową.
7. Logarytmiczną charakterystykę fazowo częstotliwościową.
8. Logarytmiczną charakterystykę amplitudowo fazową (wykres Blacka)
dla
następujących członów automatyki:
- inercyjnego I-go rzędu,
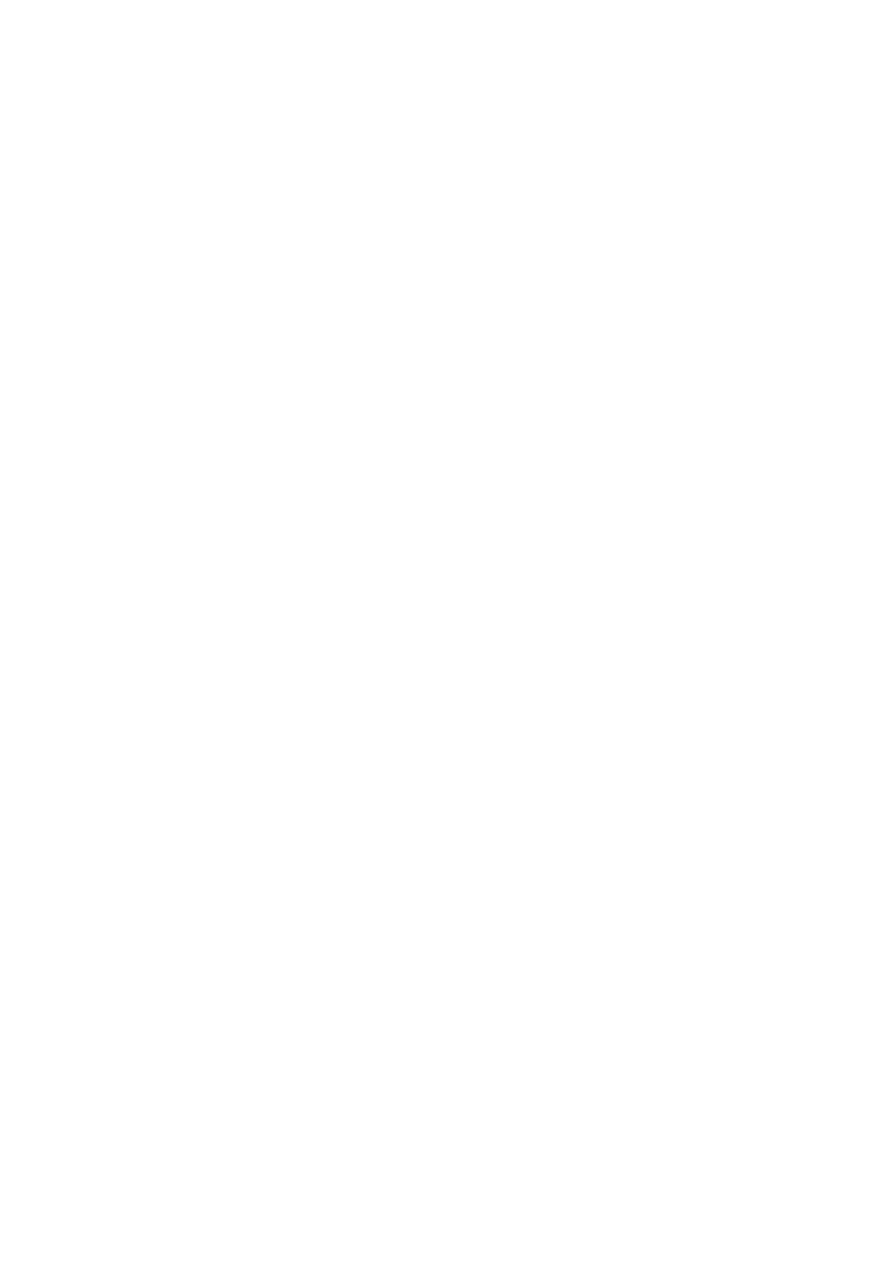
Wyznaczenie odpowiedzi y(t) na wymuszenie skokowe.
Zadanie rozwiązać dla następujących danych: T=0,01[s], k=2,
)
(
1
)
(
t
X
t
x
st
⋅
=
,
1
=
st
X
Transmitancja operatorowa członu inercyjnego I-go rzędu
1
)
(
)
(
)
(
+
⋅
=
=
s
T
k
s
X
s
Y
s
G
Pierwszy sposób: rozwiązanie numeryczne:
(
)
)
(
)
(
s
X
k
s
Y
s
s
T
⋅
=
⋅
+
⋅
)
(t
x
k
y
dt
dy
T
⋅
=
+
⋅
)
(
1
t
x
T
k
y
T
dt
dy
⋅
+
⋅
−
=
Rozwiązując numerycznie powyższe równanie wyznaczamy odpowiedź członu inercyjnego I-
go rzędu na skok jednostkowy.
Schemat blokowy w Matlab-Simulink
Wykresy x(t) i y=f(t)
Drugi sposób: rozwiązanie analityczne:
)
(
1
)
(
)
(
)
(
s
X
s
T
k
s
X
s
G
s
Y
⋅
+
⋅
=
⋅
=
s
x
s
X
t
x
t
x
st
st
1
)
(
)
(
1
)
(
⋅
=
⇒
⋅
=
(
)
1
1
1
)
(
1
)
(
)
(
)
(
+
⋅
⋅
⋅
=
⋅
⋅
+
⋅
=
⋅
+
⋅
=
⋅
=
s
T
s
x
k
s
x
s
T
k
s
X
s
T
k
s
X
s
G
s
Y
st
st
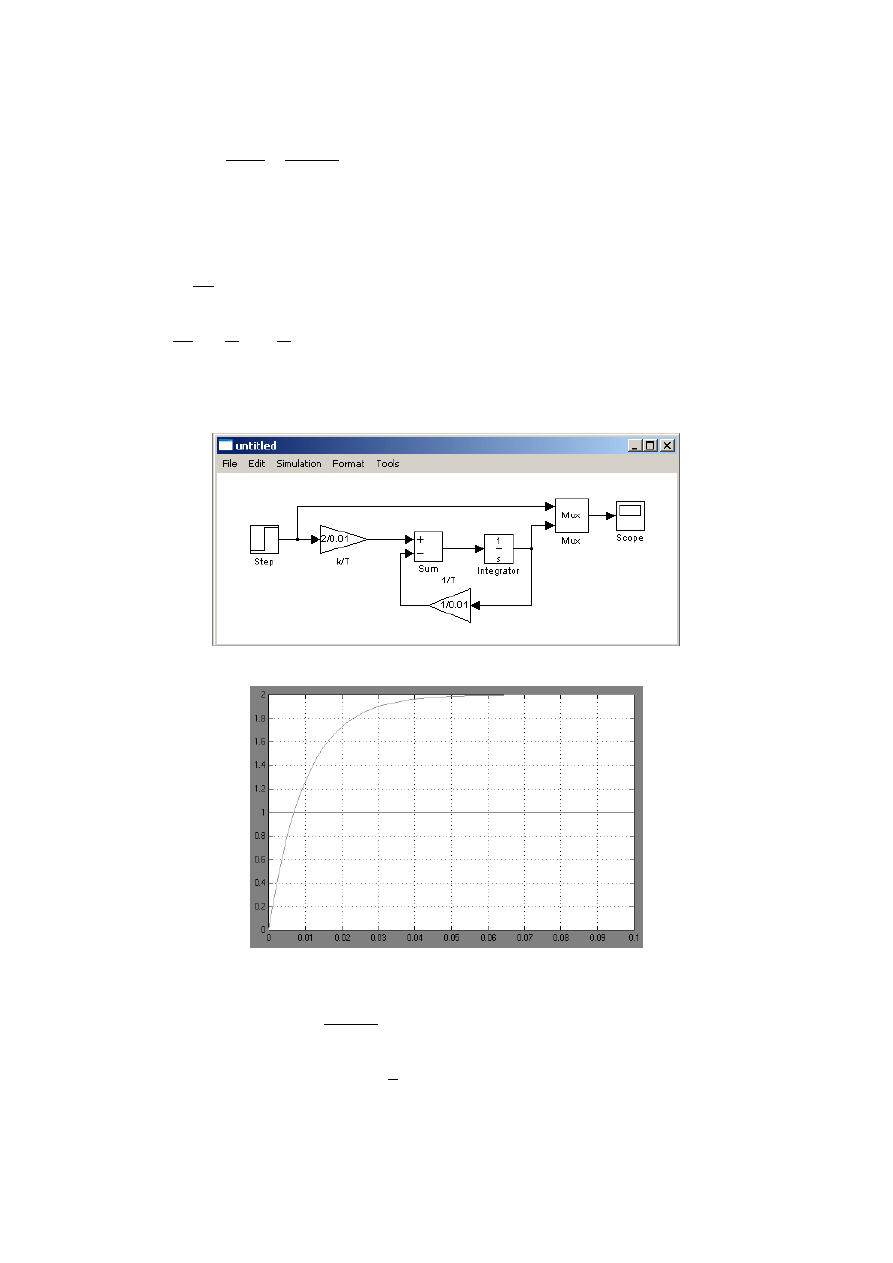
Po przejściu od transformaty Laplace’a
do postaci czasowej y(t) otrzymujemy zależność
opisującą odpowiedź skokową członu inercyjnego I-go rzędu
)
(s
Y
( )
( )
[ ]
(
)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
⋅
+
=
⎥
⎦
⎤
⎢
⎣
⎡
+
⋅
⋅
⋅
=
=
−
−
−
T
t
st
st
e
x
k
y
s
T
s
x
k
L
s
Y
L
t
y
1
1
0
1
1
Wstawić wykres y=f(t)
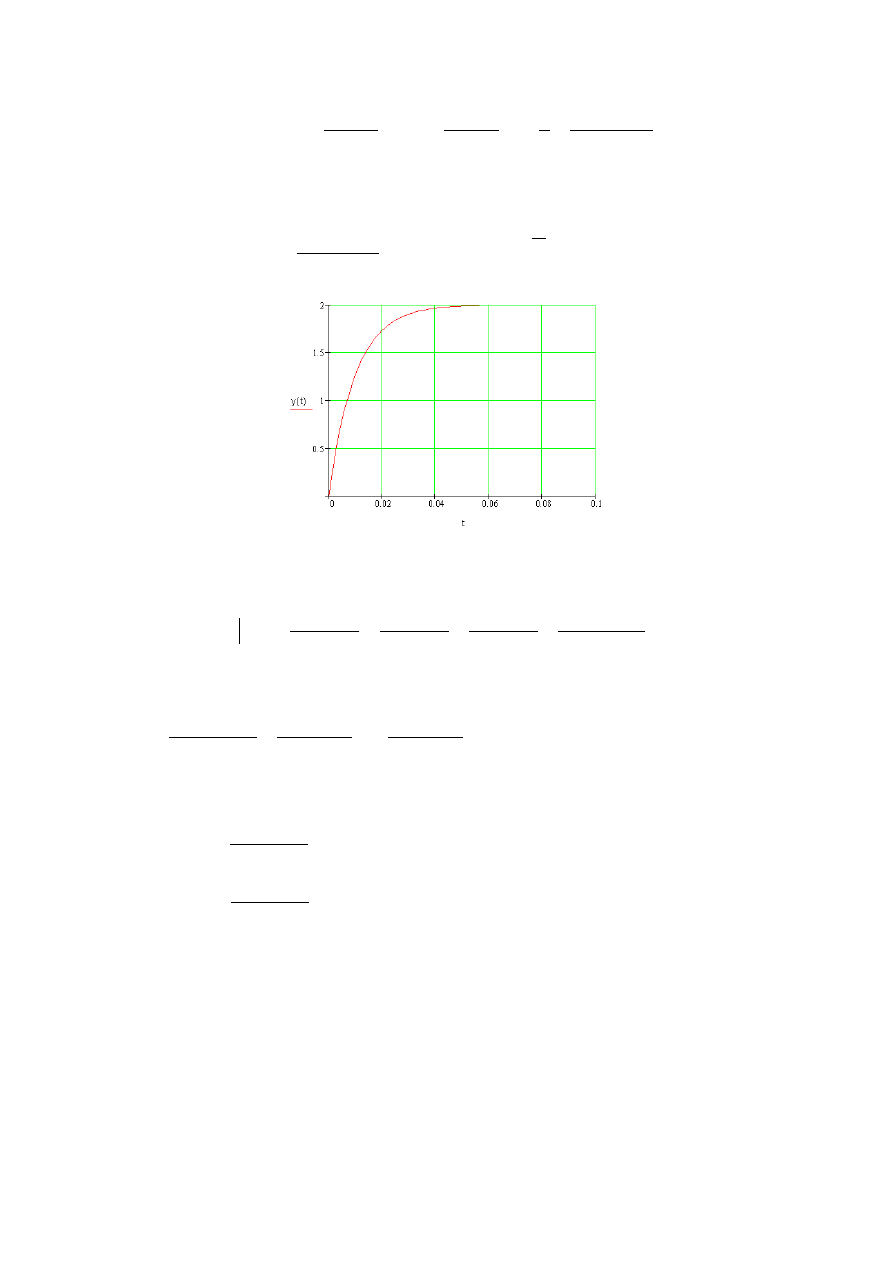
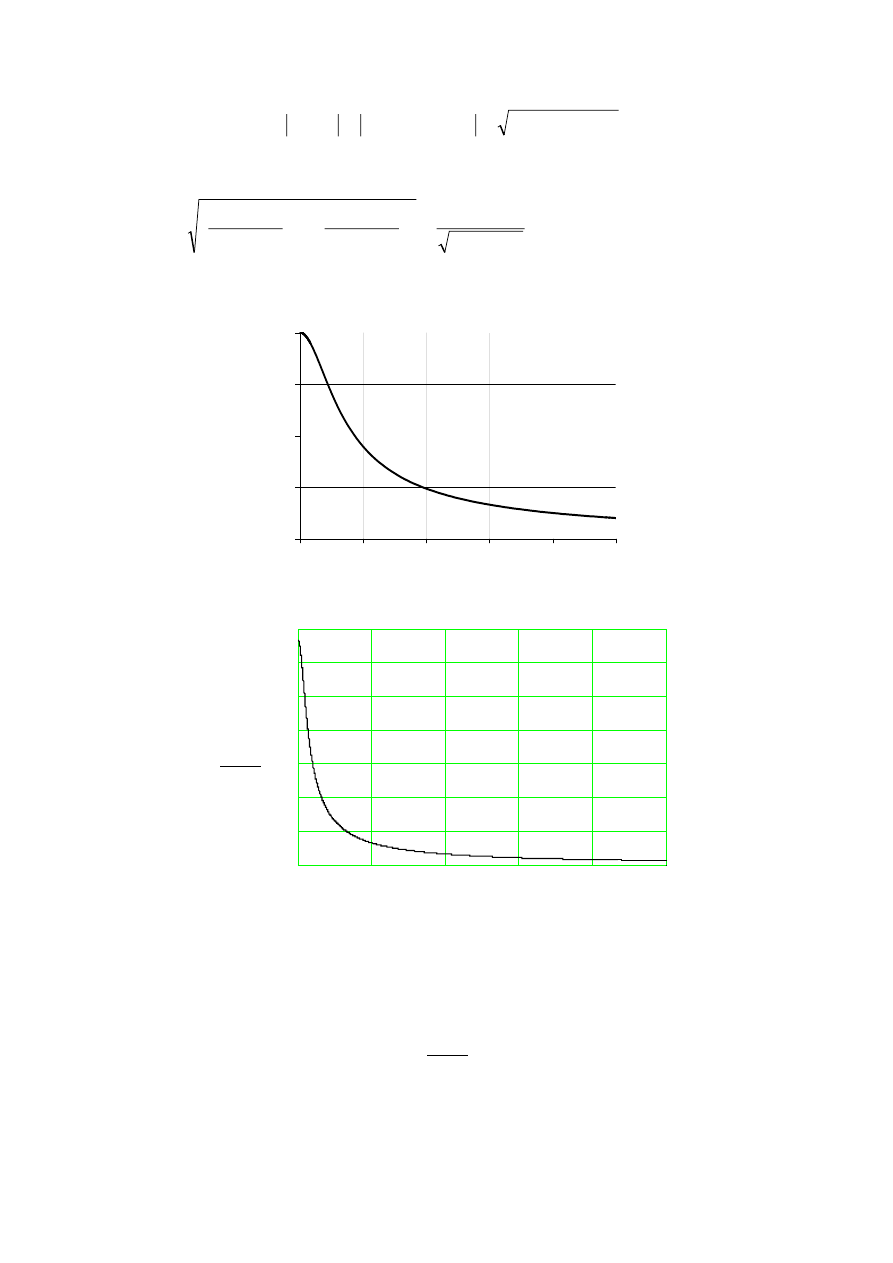
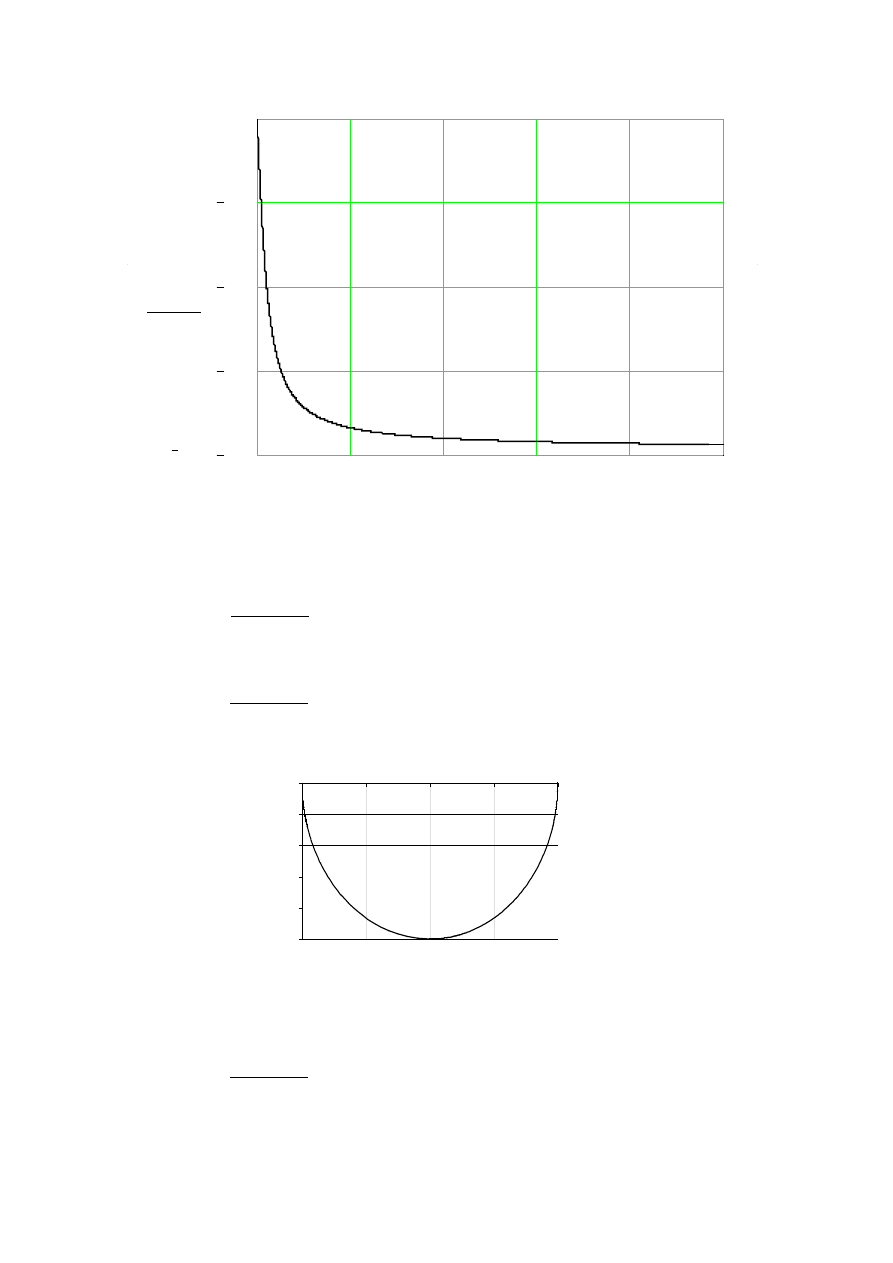
Charakterystyka amplitudowo częstotliwościowa A(
ω).
Transmitancja widmowa członu inercyjnego I-go rzędu
)
(
)
(
1
1
1
1
1
1
1
1
)
(
)
(
2
2
2
2
2
2
2
2
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
Q
j
P
T
T
k
j
T
k
T
T
k
j
T
k
j
T
j
T
j
T
k
j
T
k
s
G
j
G
j
s
⋅
+
=
+
⋅
⋅
⋅
−
⋅
+
+
⋅
=
−
⋅
−
⋅
⋅
⋅
+
+
−
⋅
−
−
=
−
⋅
−
⋅
+
⋅
=
+
⋅
=
=
=
gdzie:
1
)
(
2
2
+
⋅
=
ω
ω
T
k
P
składowa rzeczywista transmitancji widmowej
1
)
(
2
2
+
⋅
⋅
⋅
−
=
ω
ω
ω
T
T
k
Q
składowa urojona transmitancji widmowej
( )
1
1
1
)
(
)
(
)
(
)
(
)
(
)
(
2
2
2
2
2
2
2
2
2
2
+
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
+
⋅
⋅
⋅
−
+
⎟
⎠
⎞
⎜
⎝
⎛
+
⋅
=
=
+
=
⋅
+
=
=
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
T
k
T
T
k
T
k
Q
P
Q
j
P
j
G
f
A
moduł transmitancji
widmowej
0,0
0,5
1,0
1,5
2,0
0
200
400
600
800
1000
ω
A [dB]
2.1
0
A
ω
( )
5000
0
ω
0
1000
2000
3000
4000
5000
0
0.3
0.6
0.9
1.2
1.5
1.8
2.1
Charakterystyka fazowo częstotliwościowa
( )
ω
ϕ
.
Argument transmitancji widmowej
( )
( )
( )
[
]
(
)
ω
ω
ω
ω
ω
ω
ω
ϕ
⋅
−
=
⋅
−
=
=
=
=
T
arc
T
arc
P
Q
arc
j
G
f
tg
)
tg(
)
(
)
(
tg
arg
-1,6
-1,2
-0,8
-0,4
0,0
0
200
400
600
800
1000
ω
φ[rad]
0
1.6
φ ω
( )
5000
0
ω
0
1000
2000
3000
4000
5000
1.6
1.2
0.8
0.4
0
Charakterystyka amplitudowo fazowa (wykres Nyquista).
Składowa urojona transmitancji widmowej
1
)
(
2
2
+
⋅
⋅
⋅
−
=
ω
ω
ω
T
T
k
Q
Składowa rzeczywista transmitancji widmowej
1
)
(
2
2
+
⋅
=
ω
ω
T
k
P
-1,0
-0,8
-0,6
-0,4
-0,2
0,0
0,0
0,5
1,0
1,5
2,0
P(
ω)
Q(
ω)
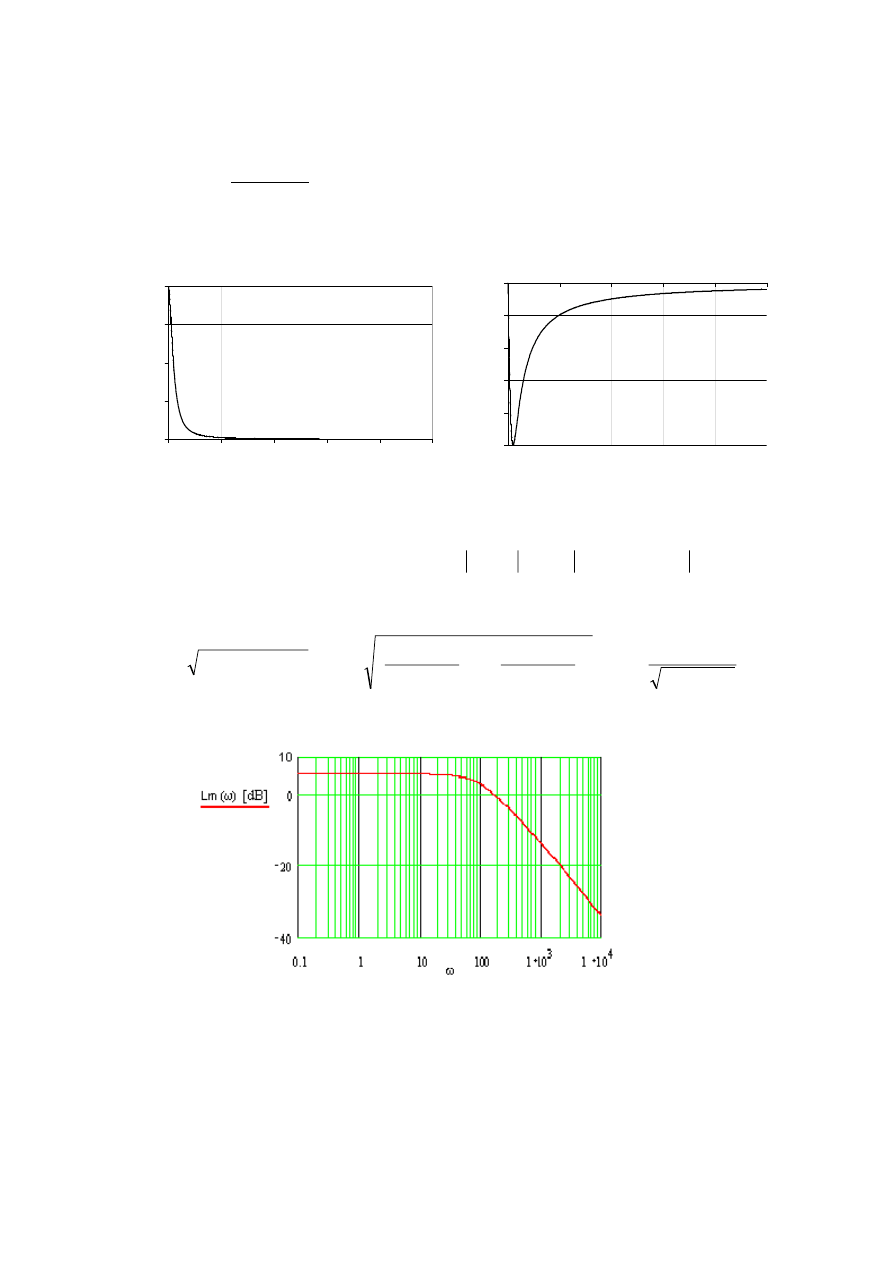
Składowe rzeczywista i urojona transmitancji.
Składowa rzeczywista transmitancji widmowej
1
)
(
2
2
+
⋅
=
ω
ω
T
k
P
Składowa urojona transmitancji widmowej
1
)
(
2
2
+
⋅
⋅
⋅
−
=
ω
ω
ω
T
T
k
Q
-1,0
-0,8
-0,6
-0,4
-0,2
0,0
0
1000
2000
3000
4000
5000
ω
Q(
ω)
0,0
0,5
1,0
1,5
2,0
0
1000
2000
3000
4000
5000
ω
p(
ω)
Logarytmiczna charakterystyka amplitudowo częstotliwościowa.
( )
( )
( )
1
lg
20
1
1
lg
20
)
(
)
(
lg
20
)
(
)
(
lg
20
)
(
lg
20
)
(
lg
20
lg
2
2
2
2
2
2
2
2
2
2
1
+
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
+
⋅
⋅
⋅
−
+
⎟
⎠
⎞
⎜
⎝
⎛
+
⋅
=
+
=
=
⋅
+
=
=
=
=
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
T
k
T
T
k
T
k
Q
P
Q
j
P
j
G
A
M
f
Lm
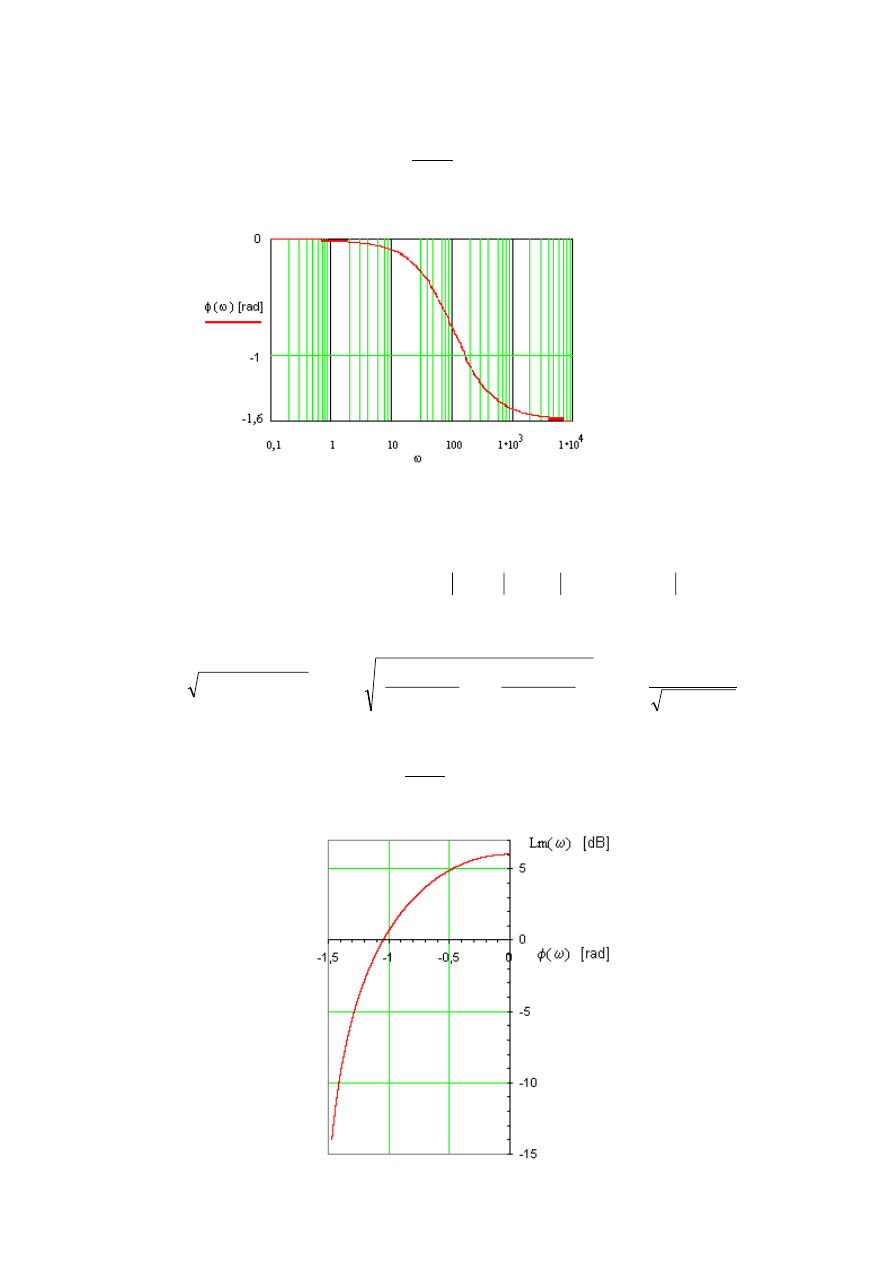
Logarytmiczna charakterystyka fazowo częstotliwościowa.
( )
( )
( )
[
]
(
)
(
ω
ω
ω
)
ω
ω
ω
ω
ϕ
⋅
−
=
⋅
−
=
=
=
=
T
arc
T
arc
P
Q
arc
j
G
f
tg
tg
)
(
)
(
tg
arg
lg
2
Logarytmiczna charakterystyka amplitudowo fazowa (wykres Blacka).
Logarytmiczna charakterystyka modułu
( )
( )
( )
1
lg
20
1
1
lg
20
)
(
)
(
lg
20
)
(
)
(
lg
20
)
(
lg
20
)
lg(
20
lg
2
2
2
2
2
2
2
2
2
2
1
+
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
+
⋅
⋅
⋅
−
+
⎟
⎠
⎞
⎜
⎝
⎛
+
⋅
=
+
=
=
⋅
+
=
=
=
=
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
T
k
T
T
k
T
k
Q
P
Q
j
P
j
G
M
f
Lm
Logarytmiczna charakterystyka fazy
( )
( )
( )
(
)
(
ω
ω
ω
)
ω
ω
ω
ω
ϕ
⋅
−
=
⋅
−
=
=
=
=
T
arc
T
arc
P
Q
arc
j
G
f
tg
tg
)
(
(
tg
arg
lg
2
Document Outline
Wyszukiwarka
Podobne podstrony:
Podstawy automatyki nr 4
Podstawy automatyki nr 2
Podstawy automatyki nr 2
Podstawy automatyki nr 6
Podstawy automatyki nr 4
Podstawy automatyki nr 1
podstawy automatyki ćwiczenia lista nr 4b
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 3c
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 1b
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
więcej podobnych podstron