1) Równania stanu elektrodynamicznego w postaci czasowej i operatorowej silnika
obcowzbudnego z uwzględnieniem elektromagnetycznej stałej czasowej
e
e
st
a
st
a
di t
u t
c t
t
R i t
L
dt
m
c t i t
d
t
m t
M
J
dt
U p
c
p
R I p
L I p
I
cI p cI
Jp
p
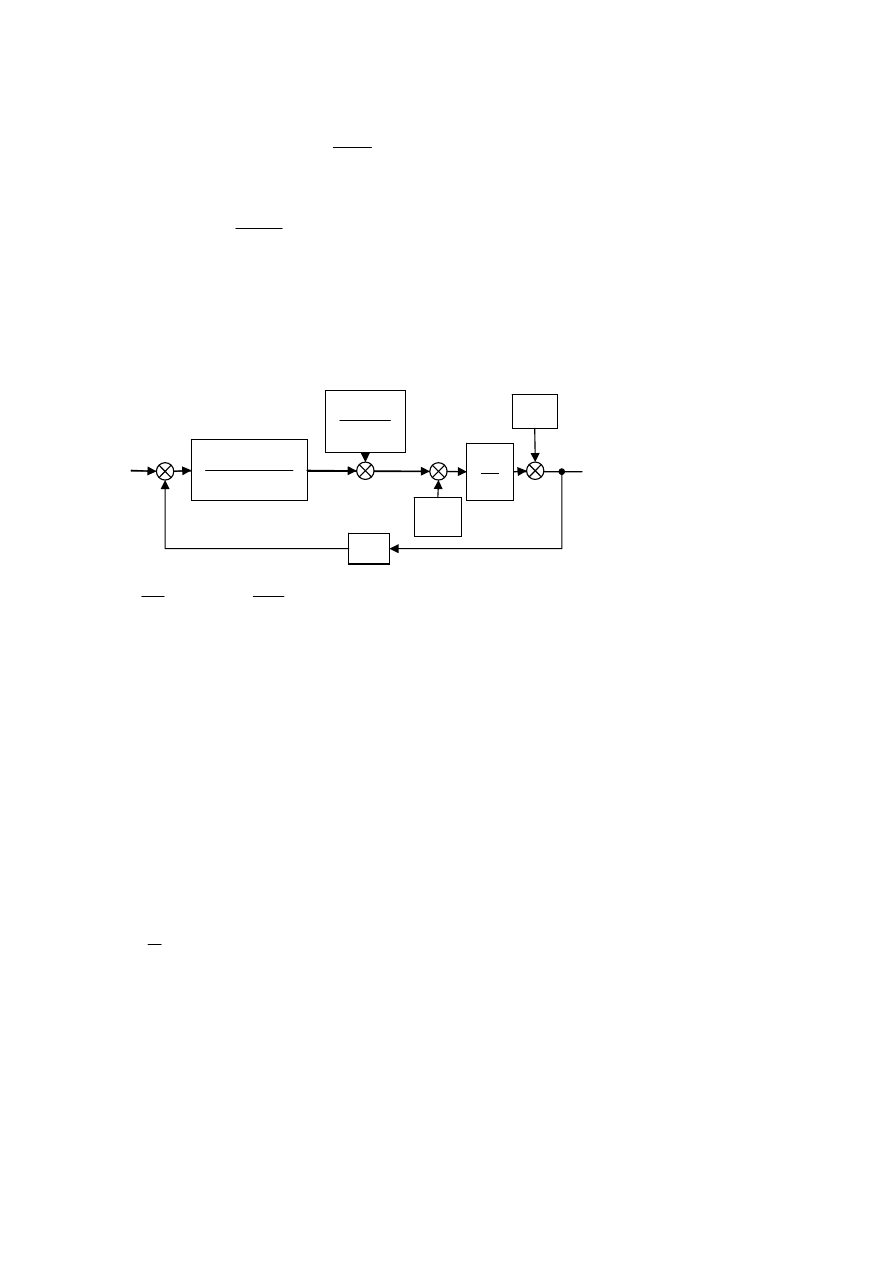
2) Schemat blokowy silnika obcowzbudnego z uwzględnieniem elektromagnetycznej stałej
Czasowej
2
e
L
JR
T
T
E p
c
p
R
c
3) Przykłady sterowników AC/DC w napędzie prądu stałego.
Mamy dwa rodzaje urządzeń realizujących przekształcanie napięcia przemiennego w
napięcie stałe są to między innymi:
Urządzenia sterowane bezpośrednio (do ich konstrukcji wykorzystuje się tyrystory)
Urządzenia sterowane pośrednio (do ich budowy wykorzystuje się diody oraz
falowniki)
Przykłady:
prostownik 3‐pulsowy (pół mostek 3‐f )
prostownik 6‐pulsowy (pełny mostek 3‐f)
mostek Gretza (pełny mostek 1‐f)
2
1
1
cos
t
d
m
t
U
U
t
T
1
e
e
pT
pT
1
1
e
R
pT
1
Ip
C
st
I
0
p
E p
U p
4) Przykłady sterowników DC/DC w napędzie prądu stałego
Za pomocą modulacji PWM i np. „mostków H” na kluczach tranzystorowych, IGBT, MOSFET‐
ach
0
1
z
impulsu
PT
n
n
t
T
K
liniowo zależne
f
f
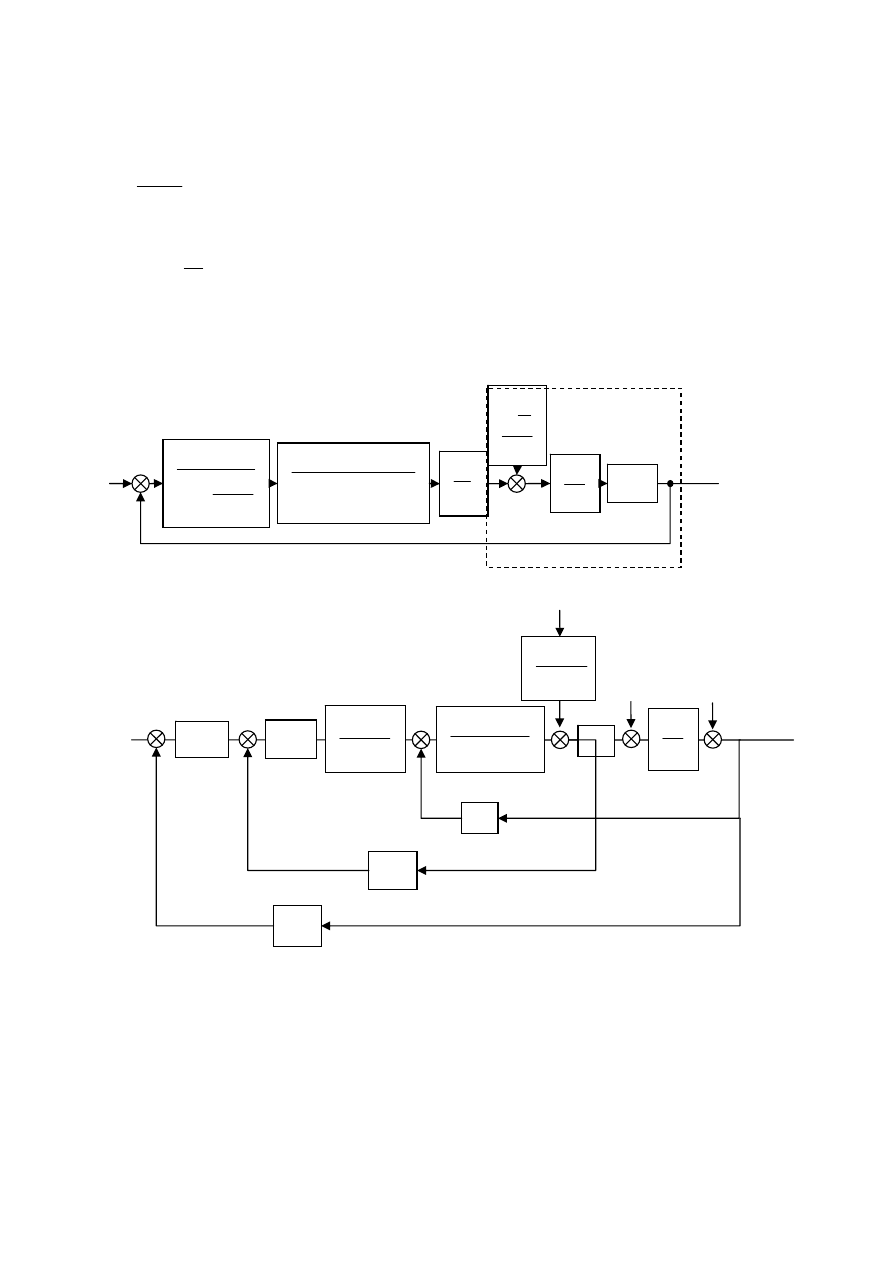
5) Schemat blokowy napędu prądu stałego dla podporządkowanego układu regulacji ze
stabilizacją prądu twornika i prędkości kątowej dla wybranego sposobu zasilania AC/DC
lub DC/DC
w
R
G
z
R
G
0
1
p
K T
p
1
1
e
pT R
c
1
Jp
1
e
e
pT
pT
c
T
K
TG
K
wz
U
a
I
st
M
a
I p
U p
p
0
2
0
1 8
32
do
p
k p
T
2
2
0
0
1
1 2
2
p
p
1
s
k
1
R
L
T
1
Jp
TG
k
6) Na przykładzie charakterystyki koparkowej napędu prądu stałego pokazać strefy pracy
regulatorów prądu i prędkości dla przypadku szeregowego oraz równoległego ich
włączenia
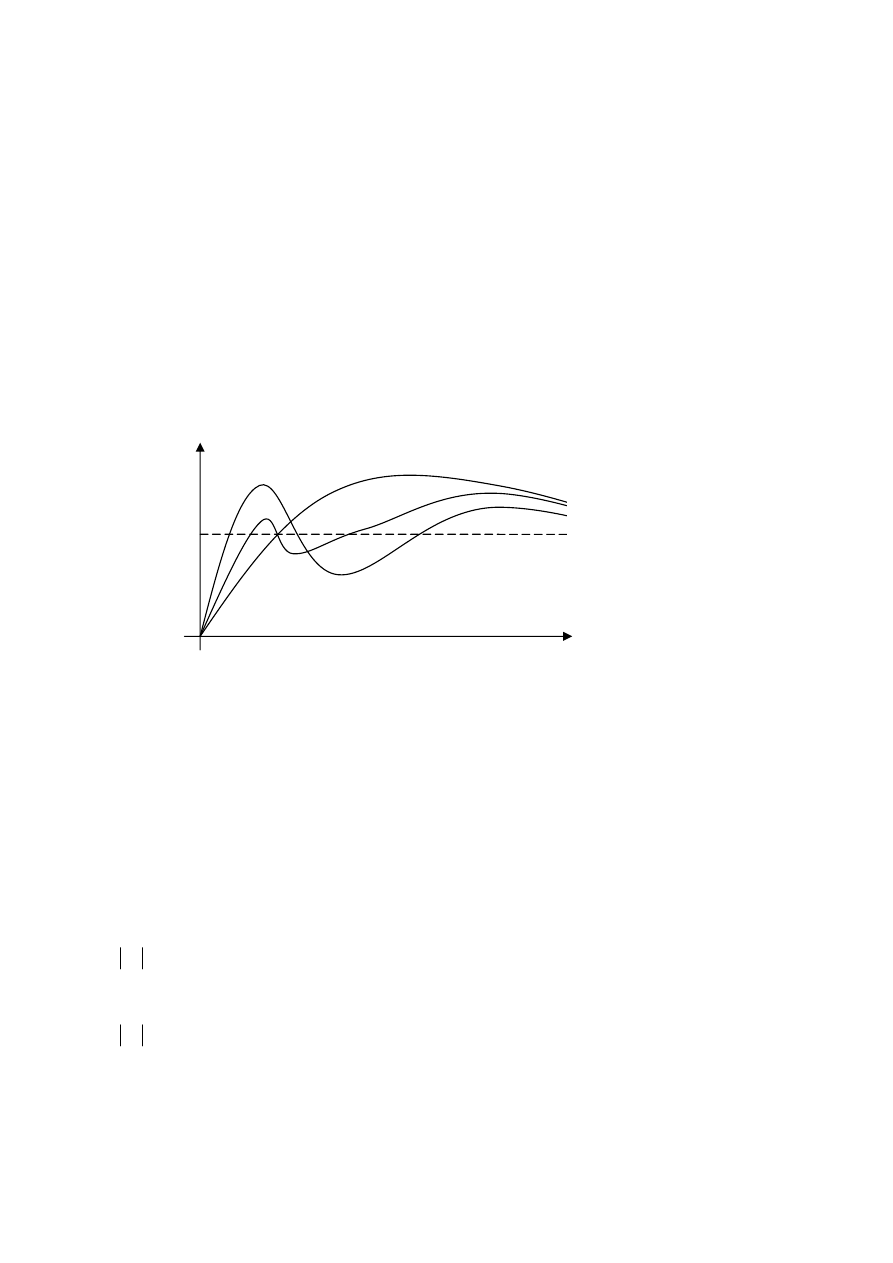
7) Kryteria optymalnych nastaw regulatorów – ISE, ITSE, IAE, ITAE
ISE) Całka ze średniej wartości błędu kwadratowego
2
0
J
xdt
ITSE) Całka ze średniej wartości błędu kwadratowego mnożona przez czas
2
0
J
t xdt
ISTSE) Całka ze średniej wartości błędu kwadratowego mnożona przez kwadrat czasu
2
2
0
J
t
xdt
IAE) Całka z wartości bezwzględnej
0
x dt
ITAE) Całka z wartości bezwzględnej mnożona przez czas
0
x tdt
ISE
ITSE
ISTSE
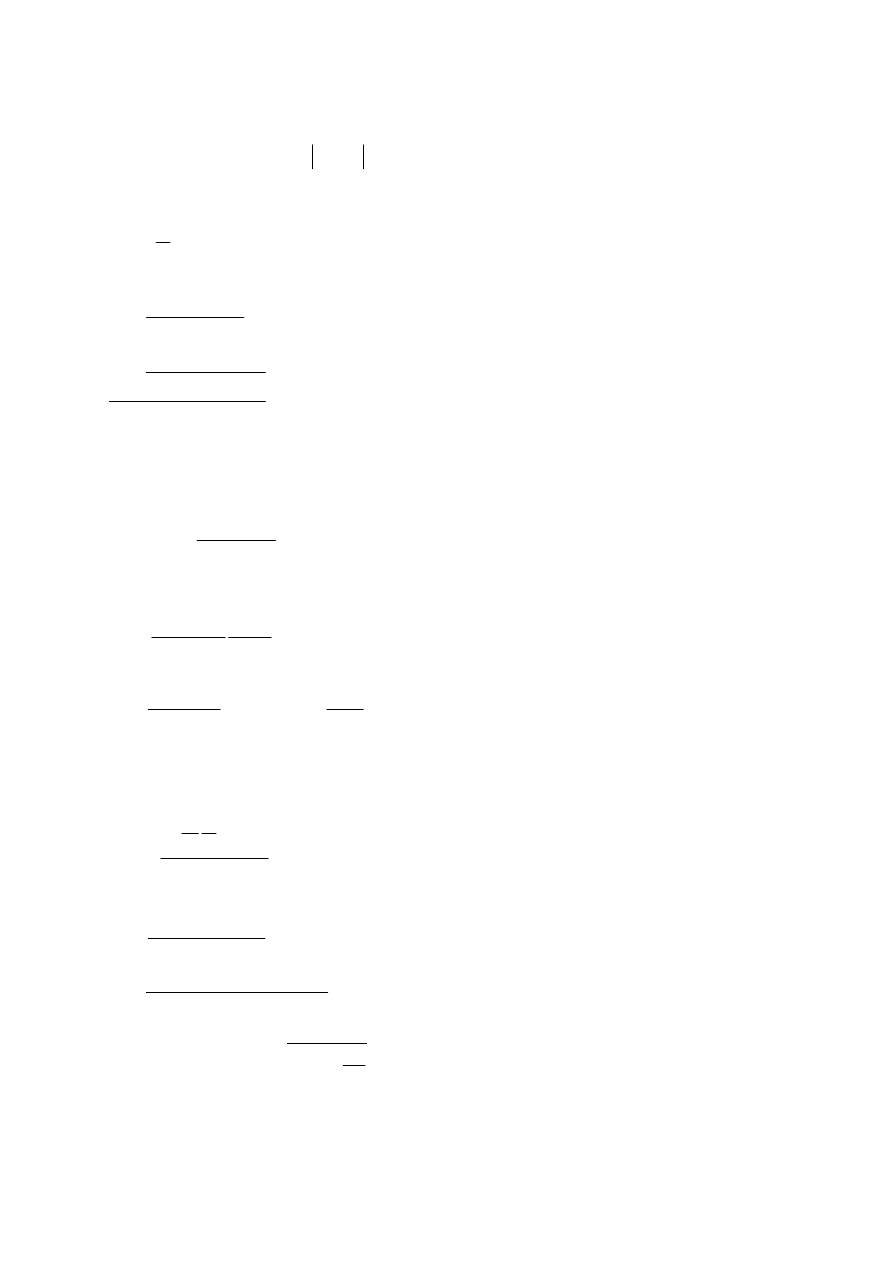
8) Dobór regulatora prądu według kryterium modułu
Kryterium modułowego optimum polega na takim dobraniu nastaw regulatora, aby
moduł układu zamkniętego
1
z
G
w możliwie szerokim paśmie częstotliwości.
Im szersze pasmo układ może przenieść tym szybciej układ osiągnie czas
przeregulowania.
0
0
0
0
2
2
0
0
1
2
1
2
1
1
1 2
2
G
PT s
c
o
p
z
p
K
k k
R
T
G
p
G
p
9) Dobór regulatora prędkości według kryterium symetrii.
Kryterium symetrycznego optimum polega na takim zaprojektowaniu struktury
regulatora aby transmitancja układu otwartego miała postać:
1
1
2
2
2
1
1
otw
sT
G
s
K
przyT
T
s sT
Jest to możliwe jeżeli obiekt jest minimalnofazowy (zera i bieguny leżą lewej
półpłaszczyźnie okręgu jednostkowego)
1
2
1
1
1
1
1
'
'
ob
L
V
V
L
n
n
e
R
e
e
e
v
V
K
K
G
p
T
pT
pT
G
T
T
pT
T
Dla n=1 regulator PI
Dla n=2 regulator PID
Dla n=3 regulator PID
2
0
2
2
3
1
1 2
1
'
2
1
'
1
1
'
TG
s
ob
o
M
R
M
c
m
z
c
c
M
R
K
k C
G
p pT
p
G
T
p T
T p
p
G
p
p T
p T T
Postać regulatora
0
0
1
8
4
Rw
c
ob
c
M
p
G
T
K pT
T
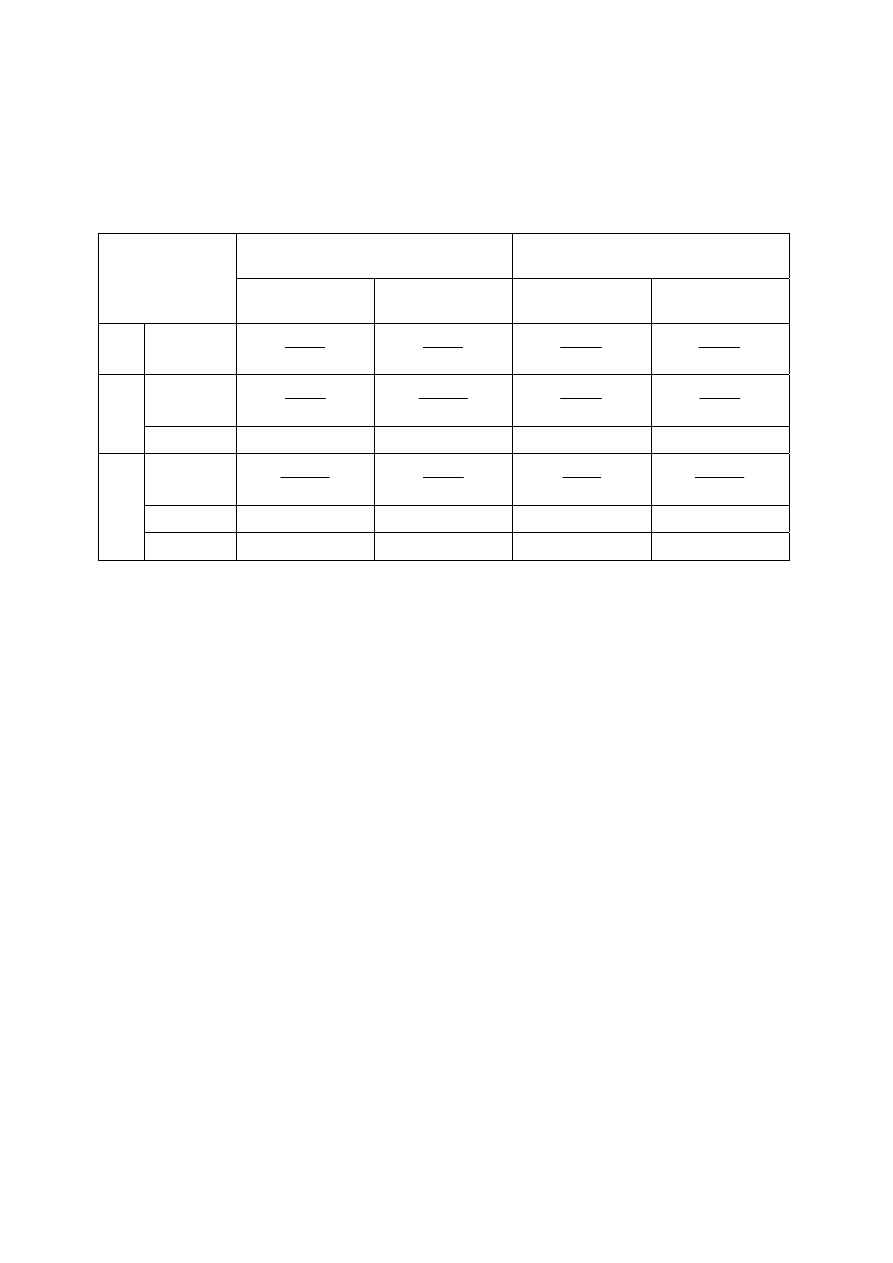
10) Nastawy regulatorów według Chiena, Hronosa i Reswicka
W przypadku gdy znamy: stałą czasową obiektu
Z
T , opóźnienie
0
T , wzmocnienie
0
K
Wiąże się to ze znajomością modelu matematycznego lub charakterystyki dynamicznej
obiektu. W/w opracowali metodę pozwalającą na obliczenie optymalnych nastaw według
poniższych wzorów.
Regulator
Przebiegi bez przeregulowania
przy zmianie
Przebiegi z 20% przeregulowaniem
przy zmianie
Wielkości
zakłóceń
Wielkości
zadanej
Wielkości
zakłóceń
Wielkości
zadanej
P
p
K
0 0
0, 3
s
T
K T
0 0
0, 3
s
T
K T
0 0
0, 7
s
T
K T
0 0
0, 7
s
T
K T
PI
p
K
0 0
0, 6
s
T
K T
0 0
0, 35
s
T
K T
0 0
0, 7
s
T
K T
0 0
0, 6
s
T
K T
i
T
0
4T
1, 2
z
T
0
2,3T
1
z
T
PID
p
K
0 0
0, 95
s
T
K T
0 0
0, 6
s
T
K T
0 0
1, 2
s
T
K T
0 0
0, 95
s
T
K T
i
T
0
2, 4T
1
z
T
0
2T
1, 35
z
T
d
T
0
0, 42T
0
0,5T
0
0, 42T
0
0, 47T
11) Nastawy regulatorów według wzmocnienia krytycznego Zieglera i Nicholsa
Wzmocnienie krytyczne
pkr
K
jest to wzmocnienie regulatora proporcjonalnego, który
połączony szeregowo z obiektem spowoduje uzależnienie się układu regulacji i
spowodowanie niegasnących drgań okresowych. Okres tych drgań nazywany jest okresem
drgań krytycznych.
Aby dokonać regulacji należy:
regulator PID ustawić na P nastawiając
max
min
,
i
i
d
d
T
T
T
T
zwiększać powoli wartość wzmocnienia
p
K
aż do otrzymania oscylacji nie gasnących
na podstawie otrzymanych wartości
,
p
osc
K T
i tabeli obliczyć wartości nastaw
Dla PID:
0, 6
0, 5
0,125
p
pkr
i
osc
d
osc
K
K
T
T
T
T
12) Sposoby regulacji prędkości kątowej w napędzie prądu stałego
a) regulacja szeregowa
Polega na włączeniu w szereg z obwodem twornika rezystancji regulacyjnej, w
metodzie jej prędkości jakie się uzyskuje zawsze są mniejsze od prędkości znamionowej.
Dodatkowo metody tej nie można stosować dla dużych maszyn.
b) regulacja bocznikowa
Polega na osłabieniu strumienia, poprzez włącznie dodatkowej rezystancji w obwód
wzbudzenia, co powoduje zmniejszenie strumienia i dodatkowo w określonych warunkach
wzrost prędkości silnika. Zbyt duże osłabienie strumienia prowadzi do rozbiegania się silnika i
niebezpiecznej awarii.
c) zmiana napięcia zasilania
Można ją uzyskać poprzez zastosowanie tyrystorowych regulatorów napięcia.
Regulacja prędkości od 0 do 1,1 prędkości znamionowej.
13) Sposoby rozruchu napędu prądu stałego
a) rozruch rezystancyjny
3
4
3
2
1
2
1
ln
n
P
n
R
R
n
n
n
t
s
n
n
R
st
M
M
p
st
U
I
R
R
R
R
R
R
R
I
I
U
U
I R
R
k
c
I
I
I
JR
t T
T
I
I
c
b) rozruch poprzez obniżenie napięcia zasilającego
14) Równania stanu elektrodynamicznego silnika indukcyjnego we współrzędnych
fazowych
1
1
2
e
b
b
m
d
U
R i
dt
i
L
d L
M
p i
i
d
d
p
dt
15) Fazor wielkości elektromagnetycznej
1
1
1
1
1
1
1
1
d
dt
x
U
r I
j
E
r I
2
2
2
2
2
2
2
2
1
1
2
1
2
2
1
2
1
1
1
1
1
2
2
2
2
2
d
dt
3
2
3
2
x
ż
s
ż
ż
s
ż
U
r I
j
E
r I
L I
L I
L I
L I
L
L
L
M
L
L
M
L
L
L
M
L
L
M
16) Równania stanu elektromagnetycznego silnika indukcyjnego w postaci fazorowej na
płaszczyźnie liczb zespolonych wirującej z prędkością
x
w
2
2
3
s
A
B
C
U
u
a u
a u
2
2
3
r
a
b
c
U
u
a u
a u
2
2
3
s
A
B
C
I
i
a i
a i
2
2
3
r
a
b
c
I
i
a i
a i
2
2
3
s
A
B
C
a
a
2
2
3
r
a
b
c
a
a
17) Sposoby regulacji prędkości kątowej silnika indukcyjnego
1
2
0
1
2
0
1
2
2
2
1
;
;"
1
"
b
b
f
U
f
m
s
p
p
a) zmiana częstotliwości zasilania
b) zmiana liczby par biegunów
c) zmiana napięcia zasilania
n
M
1
k
M
2
k
M
1
k
n
2
k
n
n
M
1
k
M
1
k
n
2
k
n
Przy stałym napięciu
Przy zmiennym napięciu i częstotliwości
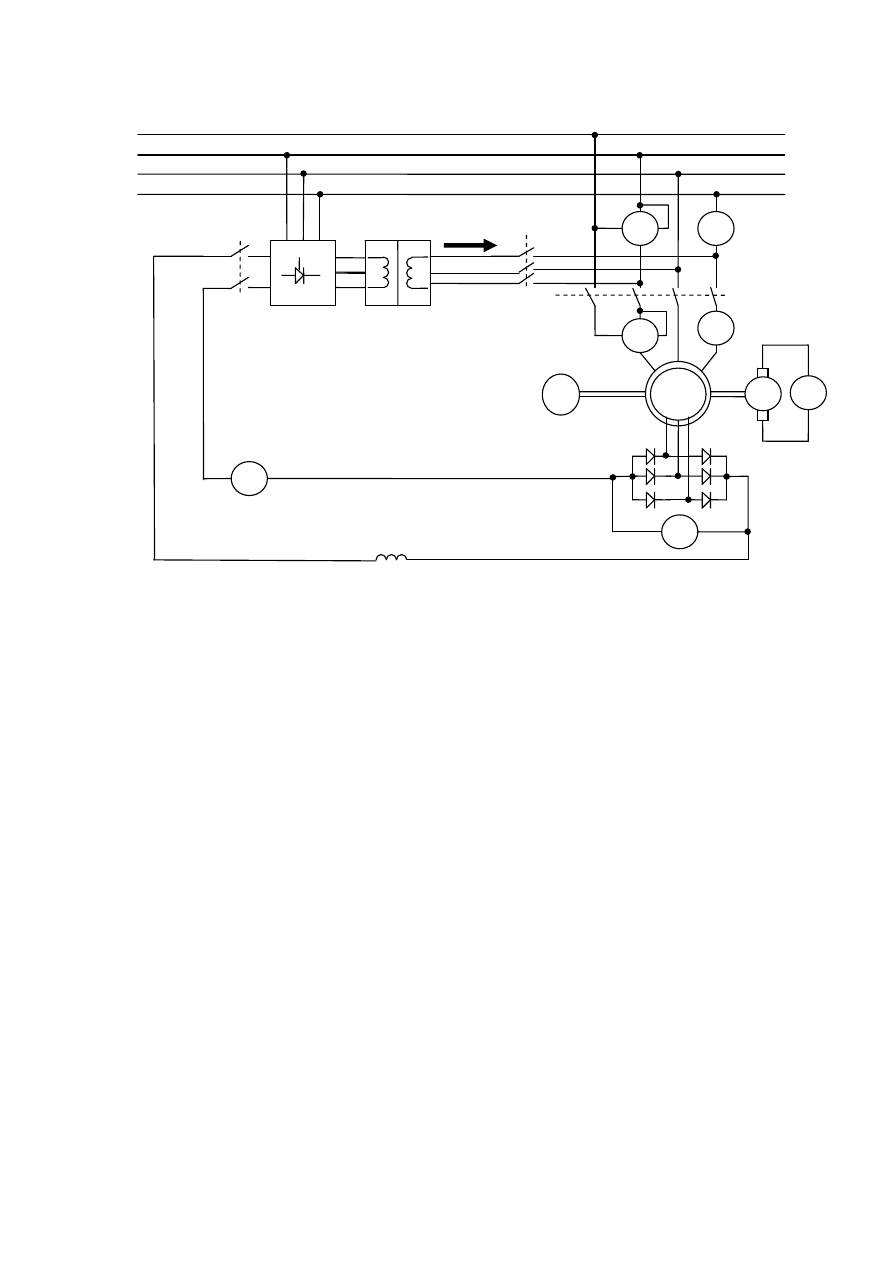
18)Kaskada stałomomentowa – schemat, charakterystyki mechaniczne, zakres regulacji
prędkości kątowej
M
W
W
A
A
Tg
V
G
V
N
L1
L2
L3
S
3
S
2
TR
W
1
W
2
U
tg
L
d
A
I
DC
U
DC
I
1
I
2
S
1
U
obc
I
obc
I
wzb
W
PT
=W
2
‐W
1
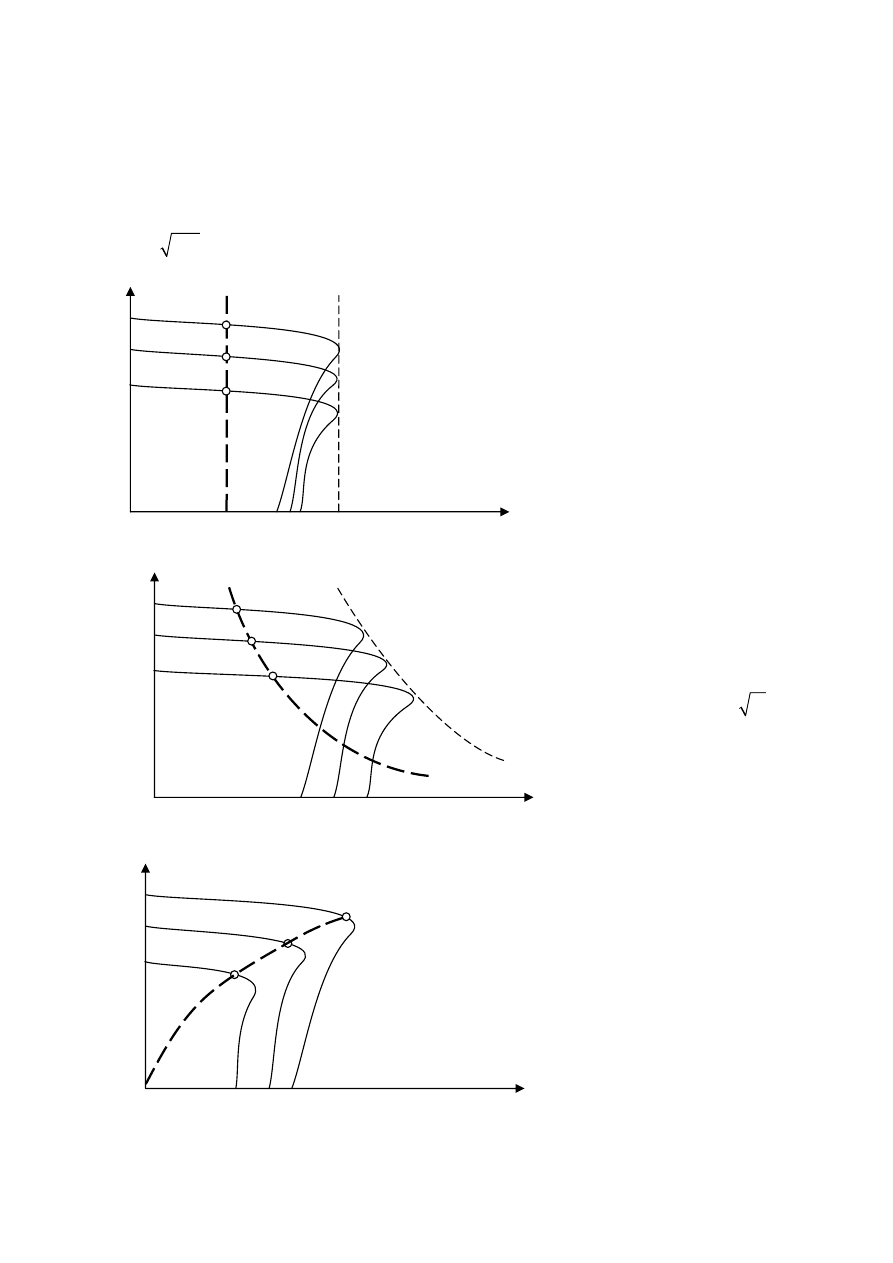
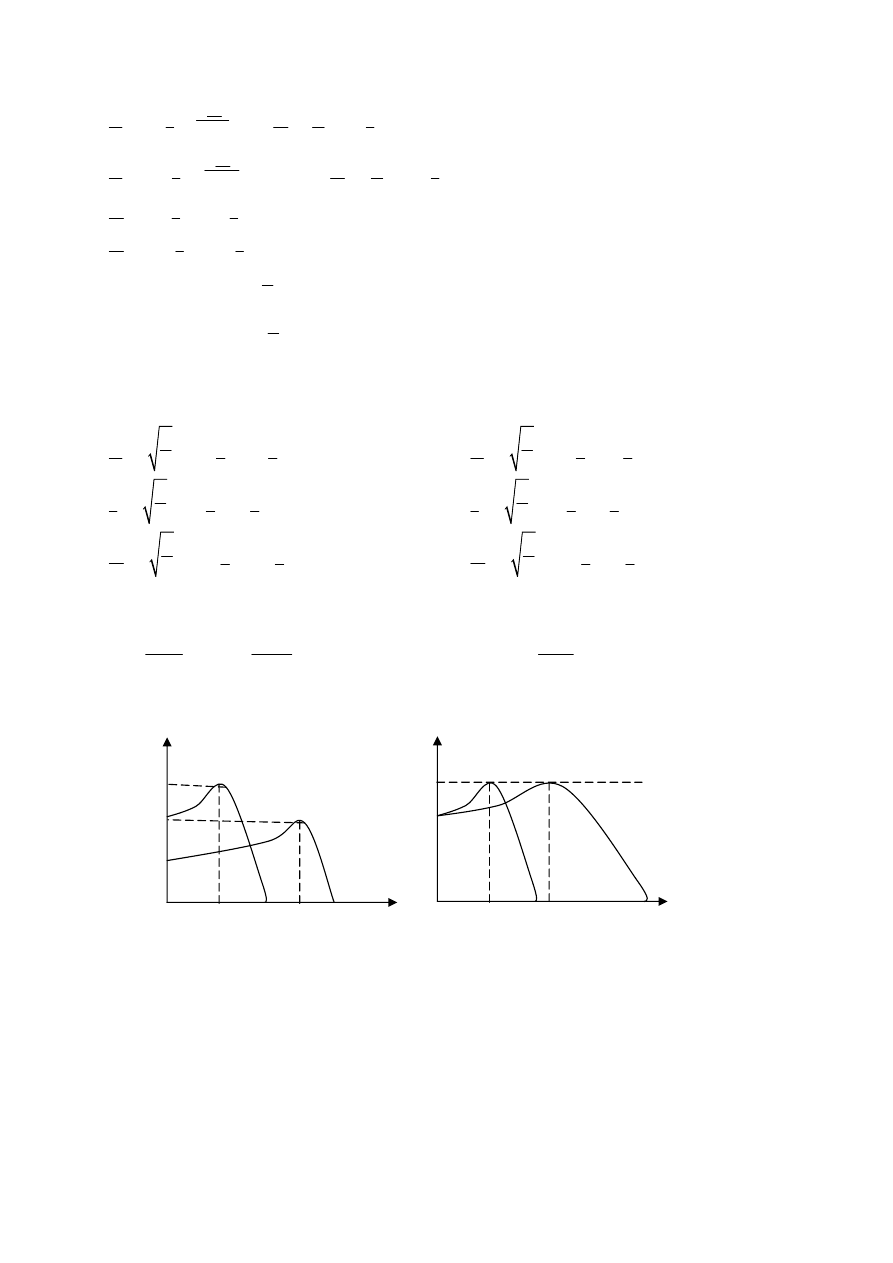
19) Skalarna metoda częstotliwościowej regulacji prędkości kątowej silnika indukcyjnego
dla
poszczególnych rodzajów obciążenia i zerowej wartości rezystancji uzwojenia stojana –
wzory, charakterystyki
W przypadku
0
t
R
nie wystąpi spadek napięcia Ne rezystancji stojana a więc zasada
częstotliwościowej regulacji prędkości kątowej silnika indukcyjnego w jednostkach względnych
określona jest wzorem:
1
1
st
U
f M
Dla obciążenia stało
momentowego
1
1
U
f
Dla obciążenia stało
mocowego
1
1
U
f
Dla obciążenia
wentylatorowego
2
1
1
U
f
e
M Nm
/
rad s
K
M
H
M
30
20
10
3H
2 H
1H
e
M Nm
/
rad s
H
M
30
20
10
3H
2 H
1H
e
M Nm
/
rad s
K
M
H
M
30
20
10
3H
2 H
1H
20)Wektorowa metoda częstotliwościowej regulacji prędkości kątowej silnika
indukcyjnego
– zasada rozdzielenia prądu
Z rysunku wynika, że
1q
i
jest momentową składową podczas gdy
d
i strumieniową składową
prądu stojana. Utrzymując stały strumień
maszyny, sterowanie momentem oznacza
sterowanie składową
1
i a sterowanie strumieniem składową
d
i
1
sin
e
b
q
q
M
p
I
I
I
Z wyrażenia na poślizg
1
1
s
oraz z wykresu wynika także:
1
d s
s
dt
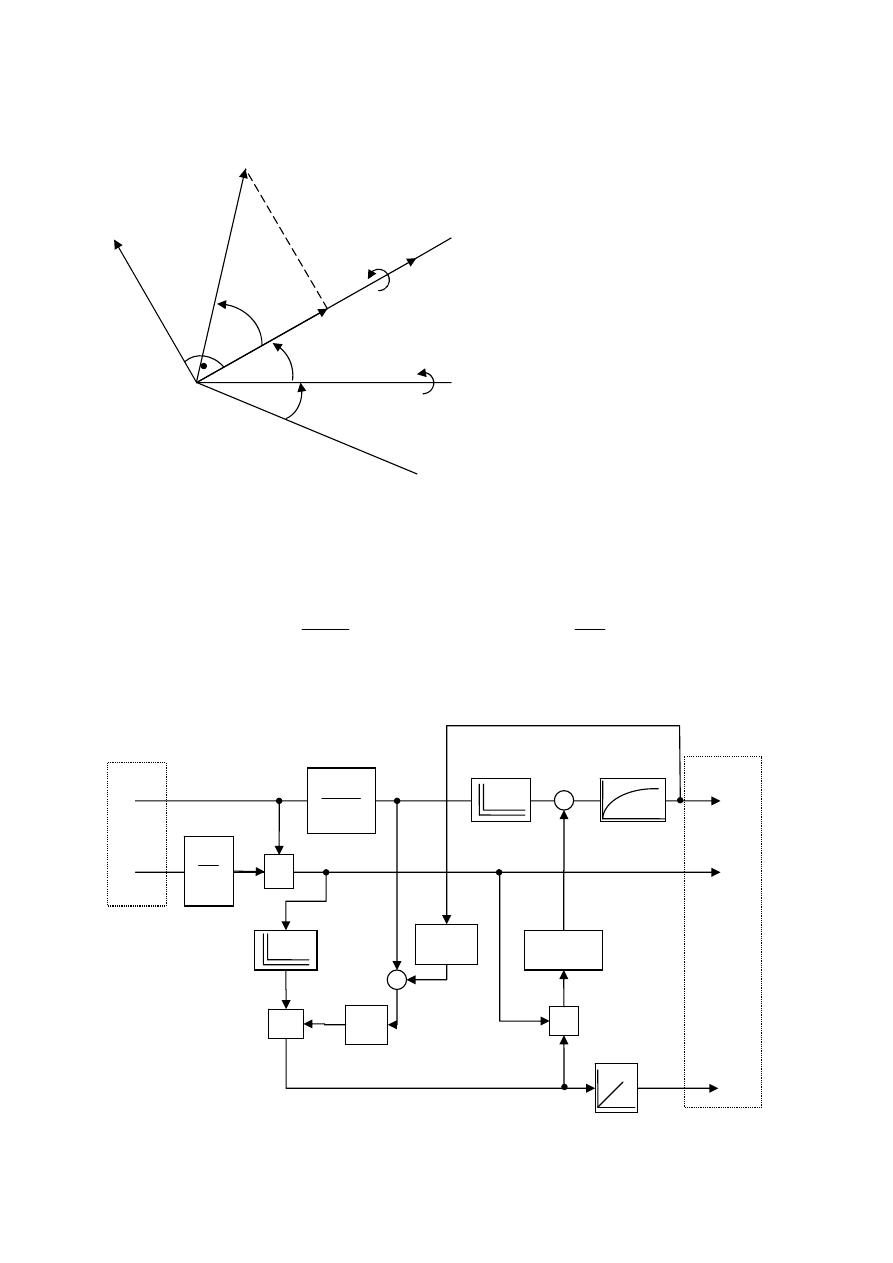
21) Bezpośrednia i pośrednia metoda rozdzielenia prądu – schematy blokowe
Pośrednie odsprzęganie prądu względem strumienia uogólnionego
1
b
p
%
1
L
%
2
T
2
2 T
X
2
z
z
e
M
2
1
pT
2
2
1 / 1
p
T
2
2
1
p
T
1
s
1
z
d
I
1
z
q
I
z
1 / p
Faza a
Oś wirnika
sr
1
1d
i
d
1
i
1q
i
q
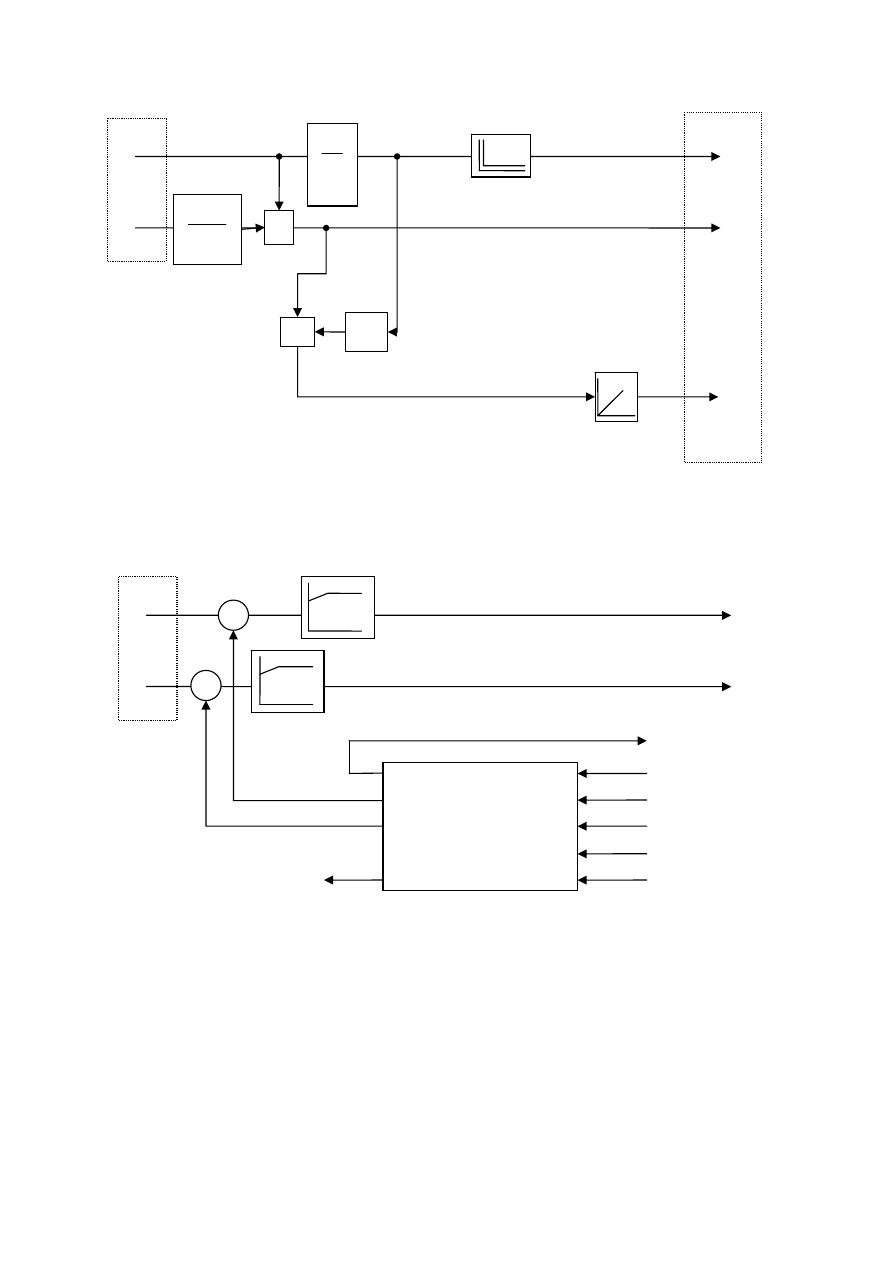
Orientacja względem strumienia wirnika
Bezpośrednie odprzęganie prądu
z
z
e
M
Obserwator
strumienia
i momentu
1
z
d
I
1
z
q
I
a
i
b
i
a
U
b
U
sr
e
M
z
sr
2
b
L
p L
%
1
L
%
2
T
z
z
e
M
2
1
pT
1 / p
1
s
1
z
d
I
1
z
q
I
z
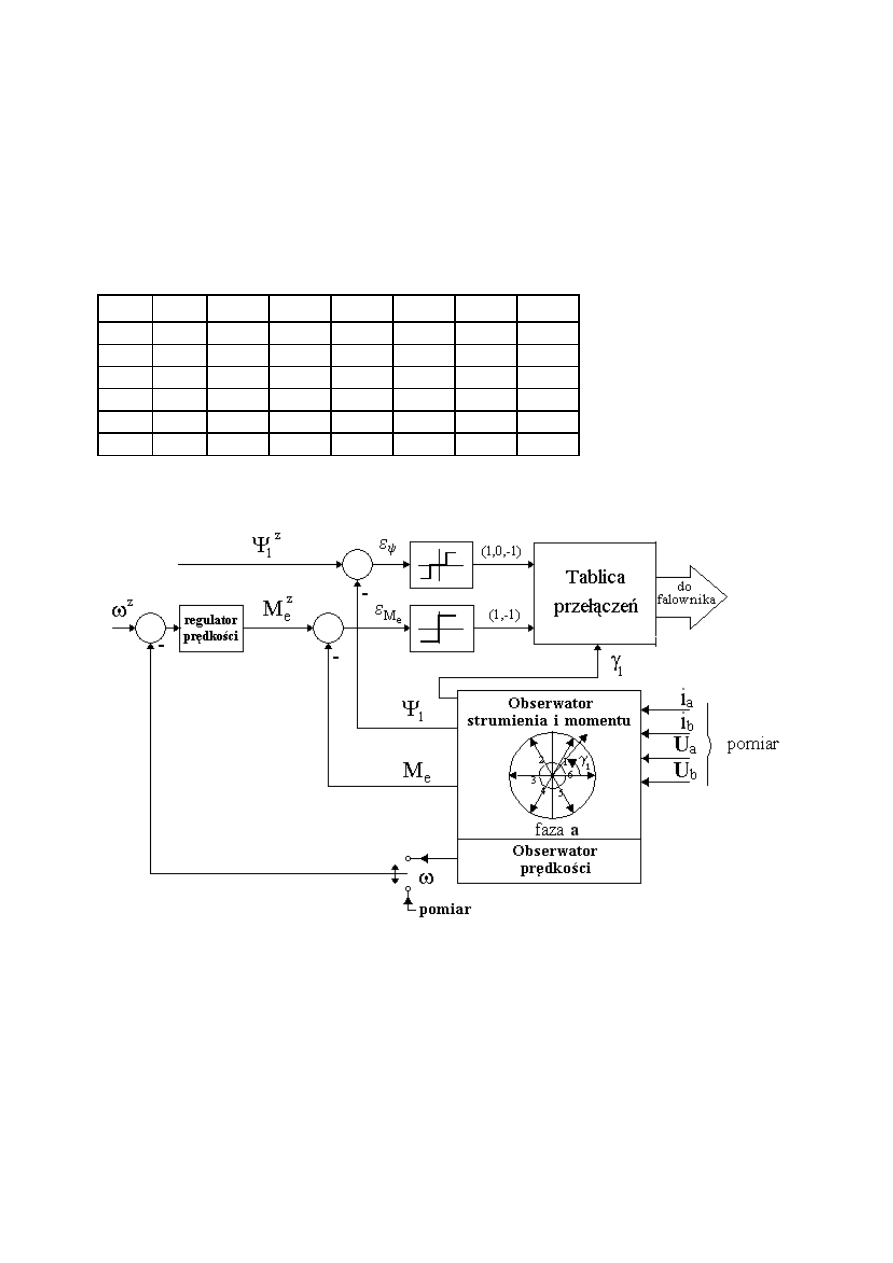
22)Metoda DTFC (Direct Torque Field Control) w częstotliwościowej regulacji prędkości
kątowej silnika indukcyjnego – tablica przełączeń, schemat blokowy
Zalety:
błąd momentu ‐ kompensacja poprzez przyśpieszanie lub spowalnianie
fazora strumienia stojana
błąd strumienia ‐ kompensacja poprzez przesuwanie trajektorii fazora
strumienia wzdłuż odpowiednich wektorów napięć
M
s
(1)
s
(2)
s
(3)
s
(4)
s
(5)
s
(6)
1 1 V
2
V
3
V
4
V
5
V
6
V
1
1 -1 V
6
V
1
V
2
V
3
V
4
V
5
0 1 V
0
V
7
V
0
V
7
V
0
V
7
0 -1 V
0
V
7
V
0
V
7
V
0
V
7
-1 1 V
3
V
4
V
5
V
6
V
1
V
2
-1 -1 V
5
V
6
V
1
V
2
V
3
V
4
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron