S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
1
3. Charakterystyki procesów
3.1. Charakterystyki statyczne
Charakterystyki statyczne otrzymuje się eksperymentalnie. Eksperyment rozpoczyna się od
wyzerowania badanego urządzenia lub układu, tj. od przyporządkowania wartości przyczynowej 𝑥
𝑜
wartości skokowej 𝑦
𝑜
. Wartości 𝑥
𝑜
, 𝑦
𝑜
są najczęściej wartościami znajdującymi się w środku zakresów
pomiarowych 𝑥
𝑝
− 𝑥
𝑘
i 𝑦
𝑝
− 𝑦
𝑘
. W zakresie pomiarowym wielkości przyczynowej 𝑥
𝑝
− 𝑥
𝑘
zmienia się
kolejno jej wartość 𝑥
𝑖
i po uzyskaniu stanu ustalonego odczytuje odpowiednie wartości 𝑦 wielkości
skutkowej 𝑦
𝑖
. Z otrzymanych wyników eksperymentalnych wykreśla się tzw. charakterystykę
rzeczywistą. Dla układu liniowego, z połączenia linią skrajnych punktów określających zakres
pomiarowy 𝑥 i 𝑦 otrzymuje się charakterystykę teoretyczną. Charakterystyka teoretyczna jest
odniesieniem do obliczania błędów nieliniowości oraz niejednoznaczności i oszacowania na tej
podstawie klasy dokładności statycznej urządzenia. Na wykrycie niejednoznaczności badanego
urządzenia należy stosować przyrządy pomiarowe o odpowiednio wyższej klasie dokładności od
badanego urządzenia. Otrzymana eksperymentalnie charakterystyka statyczna urządzenia o klasie
dokładności (błędzie względnym) poniżej 2% upoważnia do traktowania badanego urządzenia lub
procesu jako liniowego, o ile nie występują nieliniowości związane z innymi właściwościami niż
statyczne.
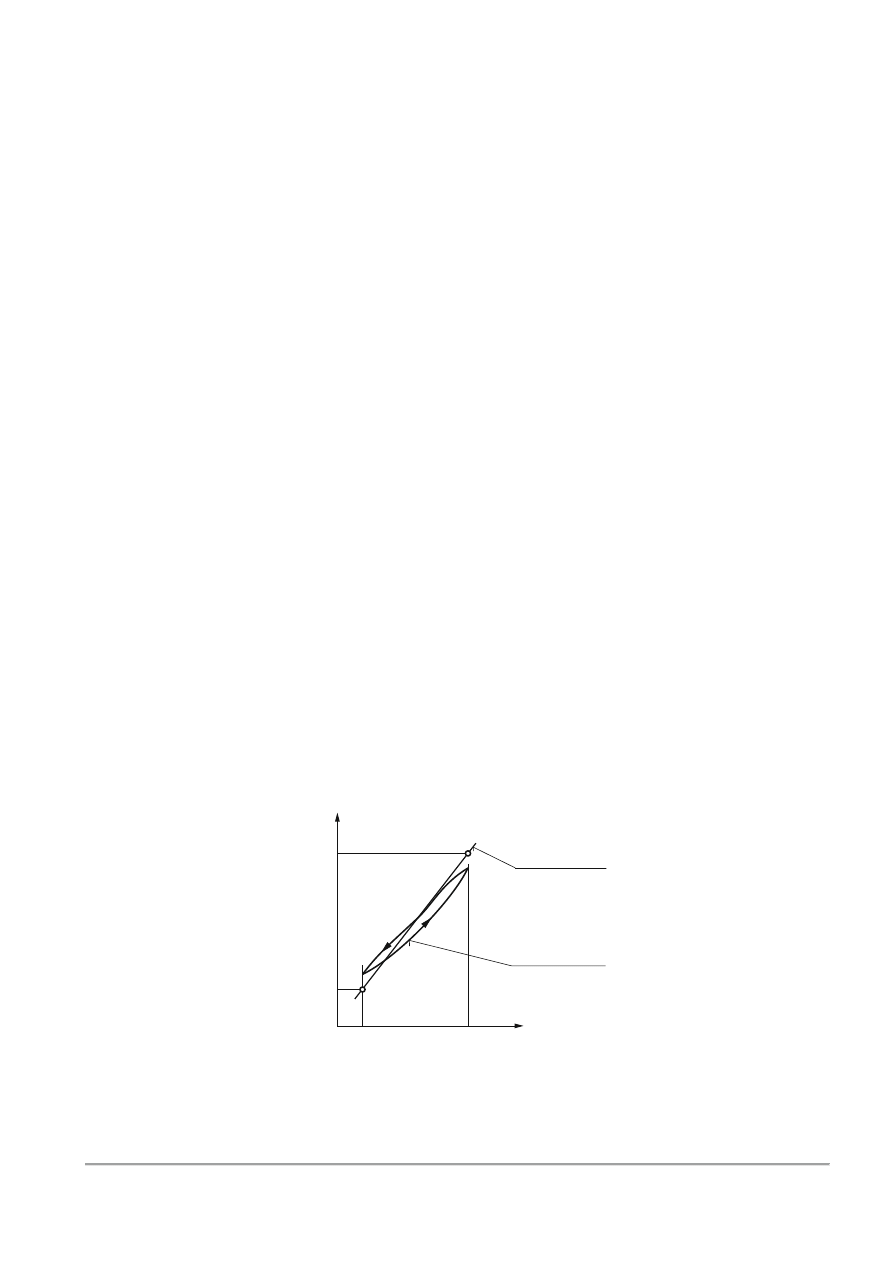
Charakterystyka statyczna określa zależność, w stanie ustalonym, sygnału 𝑥 od sygnału 𝑦 – patrz
rys.3.1.
y
k
y
p
y
charakterystyka
teoretyczna
charakterystyka
rzeczywista
x
p
x
k
x
Rys.3.1. Poglądowy przebieg charakterystyki statycznej
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
2
Dla podanych i stwierdzonych eksperymentalnie właściwości w ogólnym przypadku, dowolny
liniowy proces o parametrach skupionych opisuje równanie o postaci:
𝑎
𝑛
𝑑
𝑦
𝑛
𝑑𝑡
𝑛
+ 𝑎
𝑛−1
𝑑
𝑦
𝑛−1
𝑑𝑡
𝑛−1
+ ⋯ + 𝑎
1
𝑑
𝑦
𝑑𝑡
+ 𝑎
𝑜
𝑦 = 𝑏
𝑚
𝑑
𝑥
𝑚
𝑑𝑡
𝑚
+ 𝑏
𝑚−1
𝑑
𝑥
𝑚−1
𝑑𝑡
𝑚−1
+ ⋯ + 𝑏
1
𝑑
𝑥
𝑑𝑡
+ 𝑏
𝑜
𝑥 ,
(3.1)
𝑛 ≥ 𝑚 .
Dla zależności statycznej 𝑡 → ∞, 𝑑/𝑑𝑡 → 0 . Z zależności (3.1) otrzyma się:
𝑎
𝑜
𝑦 = 𝑏
𝑜
𝑥 ,
𝑦 =
𝑏
𝑜
𝑎
0
𝑥 ,
𝑦 = 𝑘𝑥 ,
(3.2)
𝑘 =
𝑏
𝑜
𝑎
𝑜
- wsp. wzmocnienia statycznego (parametr procesu), który zgodnie z rys.3.1 wynosi 𝑘 = (𝑋
𝑘
−
𝑌
𝑝
)/((𝑥
𝑘
− 𝑦
𝑝
)
Przekształcenie 𝐿 (Laplace’a) dla zerowych warunków początkowych (układ znajduje się w stanie
równowagi) dla wyrażenia (𝑛 − 1)wyniesie:
𝑎
𝑛
𝑠
𝑛
𝑌(𝑠) + 𝑎
𝑛−1
𝑠
𝑛−1
𝑌(𝑠) + ⋯ + 𝑎
1
𝑠 𝑌(𝑠) + 𝑎
0
𝑌(𝑠) = 𝑏
𝑚
𝑠
𝑚
𝑋(𝑠) + 𝑏
𝑚−1
𝑠
𝑚−1
𝑋(𝑠) + ⋯ +
𝑏
1
𝑠 𝑋(𝑠) + ⋯ + 𝑏
1
𝑠 𝑋(𝑠) + 𝑏
0
𝑋 (𝑠) ,
𝑋(𝑠)[𝑎
𝑛
𝑠
𝑛
+ 𝑎
𝑛−1
𝑠
𝑛−1
+ ⋯ + 𝑎
1
𝑠 + 𝑎
0
] = 𝑋(𝑠)[𝑏
𝑚
𝑠
𝑚
+ 𝑏
𝑚−1
𝑠
𝑚−1
+ ⋯ + 𝑏
1
𝑠 + 𝑏
0
] ,
𝑌(𝑠)
𝑋(𝑠)
= 𝐺(𝑠) =
𝑏
𝑚
𝑠
𝑚
+𝑏
𝑚−1
𝑠
𝑚−1
+⋯+𝑏
1
𝑠+𝑏
0
𝑎
𝑛
𝑠
𝑛
+𝑎
𝑛−1
𝑠
𝑛−1
+⋯+𝑎
1
𝑠+𝑎
0
, 𝑛 > 𝑚 ,
(3.3)
𝐺(𝑠) – transmitancja operatorowa opisująca ogólną postać procesu – jest to jedna z postaci
kanonicznych transmitancji.
Z podanych zapisów wynika: transmitancja operatorowa układu – jest to stosunek transformaty
sygnału
wyjściowego
𝑌(𝑠) = 𝐿 [𝑦(𝑡)]
do
transformaty
sygnału
wejściowego
𝑋(𝑠) = 𝐿 [𝑥(𝑡)], przy czym transformaty zostały obliczone dla zerowych warunków początkowych.
Obliczanie charakterystyki statycznej z transmitancji operatorowej
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
3
Z zależności (3.3) wynika:
𝐺(𝑠) =
𝑌(𝑠)
𝑋(𝑠)
.
Wobec czego odpowiedź układu
𝑌(𝑠) = 𝑋(𝑠) ∙ 𝐺(𝑠) .
(3.4)
Z twierdzenia o wartości końcowej (patrz przekształcenie Laplace'a) wynika, że wartość
statyczna 𝑦
𝑠𝑡
sygnału wyjściowego 𝑦(𝑡) wynosi:
𝑦
𝑠𝑡
= lim
𝑡→∞
𝑦(𝑡) = lim
𝑠→∞
𝑠 ∙ 𝑌(𝑠) .
(3.5)
Podstawiając za 𝑌(𝑠) zależność (3.4) otrzyma się:
𝑦
𝑠𝑡
= lim
𝑠→0
𝑠 ∙ 𝑋(𝑠) ∙ 𝐺(𝑠) .
(3.6)
Dla obliczenia 𝑦
𝑠𝑡
należy przyjąć określone wymuszenie 𝑋(𝑠).
Niech 𝑥(𝑡) zmienia się skokowo o wartość 𝑥
𝑠𝑡
tj.
𝑥(𝑡) = 𝑥
𝑠𝑡
∙ 1(𝑡) ,
(3.7)
𝑋(𝑠) =
𝑥
𝑠𝑡
𝑠
,
Z tego wynika:
𝑦
𝑠𝑡
= lim
𝑠→0
𝑠
𝑥
𝑠𝑡
𝑠
∙ 𝐺(𝑠)| : 𝑥
𝑠𝑡
,
(3.8)
𝑦
𝑠𝑡
𝑥
𝑠𝑡
= 𝐺(𝑠)|
𝑠=0
.
(3.9)
Ostatecznie otrzyma się:
𝑦
𝑠𝑡
𝑥
𝑠𝑡
=
𝑏
0
𝑎
0
,
(3.10)

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
4
𝑦
𝑠𝑡
=
𝑏
0
𝑎
0
∙ 𝑥
𝑠𝑡
= 𝑘 ∙ 𝑥
𝑠𝑡
.
(3.11)
Oznaczenia 𝑥
𝑠𝑡
i 𝑦
𝑠𝑡
wprowadzono dla wyraźnego zaznaczenia wartości statycznych.
W podobny sposób można bardzo łatwo wyznaczyć dowolną zależność statyczną między
wybranymi sygnałami w układzie, po wcześniejszym określeniu stosownej transmitancji operatorowej
wiążącej rozpatrywane sygnały.
3.2. Charakterystyki dynamiczne czasowe, odpowiedzi układu
Jeżeli dowolny proces lub układ sterowania znajduje się w stanie równowagi i na jego wejście
wprowadzi się jedno z wymuszeń podanych w tablicy 2.1, nazywanych typowymi, to uzyskany przebieg
sygnału wyjściowego tego procesu (układu) nazywa się charakterystyką dynamiczną czasową. Jeżeli
wymuszenie miało przebieg zgodny z funkcją impulsową, to otrzymana charakterystyka dynamiczna
czasowa nazywana jest odpowiedzią impulsową.
W praktyce najczęściej stosuje się charakterystyki skokowe. Charakterystyki impulsowe w wielu
przypadkach są trudne do technicznego wykonania, mają bardziej znaczenie teoretyczne i mogą być
wyznaczone graficznie z charakterystyk skokowych. Wyjątek stanowi zdejmowanie charakterystyk
impulsowych dla układów mechanicznych, np. obracające się (lub nieruchome) wrzeciono obrabiarki.
Wówczas wymuszenie impulsowe można zrealizować przez lekkie uderzenie elementem metalowym
we wrzeciono. Poszukiwaną odpowiedzią są najczęściej drgania rejestrowane przez przetwornik
przyspieszeń umieszczony na obudowie wrzeciona.
Wymuszenia liniowo- lub parabolicznie narastające stosuje się m. innymi do: identyfikacji
właściwości dynamicznych procesów, testów (np. test toksyczności spalin w silnikach spalinowych)
tworzenia funkcji sklejanych opisujących wartości zadane w sterowaniu lub do modelowania średnich
wartości zakłóceń.
Z definicji charakterystyki dynamicznej czasowej wynika, że jest to odpowiedź układu,
otrzymana dla zerowych warunków początkowych, na jedno z wymuszeń przedstawionych w tablicy
2.1. Określenie "obliczanie odpowiedzi układu" nawiązuje do sensu fizycznego zadania
matematycznego, które jest nazywane rozwiązaniem równania różniczkowego dla określonych
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
5
warunków początkowych. Te ogólnie określone "warunki początkowe" definiowało zarówno
początkowy stan równowagi układu, jak i funkcję opisującą wymuszenie.
W ogólnym przypadku, dowolny jednowymiarowy układ liniowy może to być rozpatrywany jako
proces, zamknięty układ regulacji lub każdy inny dowolny układ, może być opisany transmitancją
operatorową 𝐺(𝑠) o pierwszej postaci kanonicznej w sposób:
𝐺(𝑠) =
𝑏
𝑚
𝑠
𝑚
+𝑏
𝑚1
𝑠
𝑚1
+⋯+𝑏
1
𝑠+𝑏
0
𝑎
𝑛
𝑠
𝑛
+𝑎
𝑛−1
𝑠
𝑛−1
+⋯+𝑎
1
𝑠+𝑎
0
𝑛 ≥ 𝑚
.
(3.12)
Wobec tego odpowiedź układu, tj. transformata sygnału wyjściowego 𝑌(𝑠) wynosi:
𝑌(𝑠) = 𝑋(𝑠) 𝐺(𝑠).
(3.13)
a oryginał tego sygnału przedstawia się w sposób:
𝑦(𝑡) = 𝐿
−1
[𝑋(𝑠) 𝐺(𝑠)] .
(3.14)
W celu obliczenia odpowiedzi określonego układu w funkcji czasu 𝑦(𝑡) - oryginału funkcji,
konieczna jest znajomość: wymuszenia 𝑥(𝑡), transmitancji operatorowej 𝐺(𝑠) oraz warunków
początkowych 𝑥(0
+
), 𝑥̇(0
+
), … , 𝑥
(𝑛)
(0
+
), w których znajduje się układ w chwili wprowadzania
wymuszenia 𝑥(𝑡).
Obliczanie odpowiedzi skokowej
Rozpatrzona zostanie postać ogólna odpowiedzi układ o transmitancji (3.12), otrzymana dla
wymuszenia skokowego:
𝑥(𝑡) = 𝑥
𝑠𝑡
𝟏(𝑡) ,
𝑋(𝑠) =
𝑥
𝑠𝑡
𝑠
.
(3.15)
oraz zerowych warunków początkowych.
Przypadek ten przedstawia charakterystykę skokową układu o ogólnej transmitancji
operatorowej (3.12).
Zgodnie z zależnością (3.13) otrzyma się:
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
6
𝑌(𝑠) =
𝑥
𝑠𝑡
𝑠
𝑏
𝑚
𝑠
𝑚
+ 𝑏
𝑚−1
𝑠
𝑚−1
+⋯+ 𝑏
1
𝑠+ 𝑏
𝑜
𝑎
𝑛
𝑠
𝑛
+ 𝑎
𝑛−1
𝑠
𝑛−1
+⋯+ 𝑎
1
𝑠+ 𝑎
𝑜
,𝑛 ≥ 𝑚 .
(3.16)
Gdy 𝑏
𝑦
transmitancja operatorowa 𝐺(𝑠) miała prostą postać, np. byłoby to jedne z
elementarnych właściwości, to przebieg 𝑦(𝑡) można byłoby odczytać bezpośrednio z tablic
transformat. W przypadku złożonym jak ten ogólny, dla posłużenia się tablicami transformat należy
zależność (3.16) rozłożyć na ułamki proste. Wcześniej należy obliczyć pierwiastki równania
charakterystycznego (bieguny układu) rozpatrywanego układu tj.:
𝑎
𝑛
𝑠
𝑛
+ 𝑎
𝑛−1
𝑠
𝑛−1
+ ⋯ + 𝑎
1
𝑠 + 𝑎
𝑜
= 0 .
(3.17)
Najbardziej ogólny przypadek dotyczy równania charakterystycznego, które posiada 𝑘
pierwiastków jednoktornych (zarówno rzeczywistych jak i zespolonych sprężonych) oraz 𝑛 − 𝑘
pierwiastków wielokrotnych, np. o krotnościach 𝑚, 𝑙, itd. Wówczas zależność (3.16) może być zapisana
w sposób:
𝑌(𝑠) = 𝑥
𝑠𝑡
(
𝐴
0
𝑠
𝑜
−𝑠
𝑜
+
𝐴
1
𝑠−𝑠
1
+
𝐴
2
𝑠−𝑠
2
+ ⋯ +
𝐴
𝑘
𝑠−𝑠
𝑘
+
𝐵
1
𝑠−𝑠
𝑘+1
+
𝐵
2
(𝑠−𝑠
𝑘+1
)
2
+ … +
𝐵
𝑚
(𝑠−𝑠
𝑘+𝑚
)
𝑚
+ … )
(3.18)
Stałe rozkładu określone są przez zależności:
𝐴
𝑘
=
𝐿(𝑠
𝑘
)
𝑀′(𝑠
𝑘
)
𝑀
′
(𝑠
𝑘
) =
𝑑𝑀(𝑠)
𝑑𝑠
|
𝑠 = 𝑠
𝑘
(3.19)
lub
𝐴
𝑘
=
𝐿(𝑠) (𝑠−𝑠
𝑘
)
𝑀(𝑠)
|
𝑠 = 𝑠
𝑘
𝐿(𝑠) = 𝑏
𝑚
𝑠
𝑚
+ 𝑏
𝑚−1
𝑠
𝑚−1
+ ⋯ + 𝑏
1𝑠
+ 𝑏
𝑜
,
(3.20)
𝑀(𝑠) = 𝑎
𝑛
𝑠
𝑛
+ 𝑎
𝑛−1
𝑠
𝑛−1
+ . .. 𝑎
1
𝑠 + 𝑎
𝑜
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
7
𝐵
𝑚
=
𝐿 (𝑠) (𝑠−𝑠
𝑘+1
)
𝑚
|
𝑠 = 𝑠
𝑘+1
,
𝐵
𝑚−1
=
𝑑
𝑑𝑠
[
𝐿 (𝑠) (𝑠−𝑠
𝑘+1
)
𝑚
𝑀(𝑠)
|
𝑠 = 𝑠
𝑘+1
,
(3.21)
𝐵
𝑚−2
=
1
2
𝑑
𝑑𝑠
[
𝐿(𝑠) (𝑠−𝑠
𝑘+1
)
𝑚
𝑀(𝑠)
|
𝑠 = 𝑠
𝑘+1
,
𝐵
𝑚−𝑖
=
1
𝑖 !
𝑑
𝑖
𝑑𝑠
𝑖
[
𝐿(𝑠) (𝑠−𝑠
𝑘+1
)
𝑚
𝑀(𝑠)
|
𝑠 = 𝑠
𝑘+1
,
gdzie:
𝑠
𝑜
= 0,
𝑠
1
, 𝑠
2
, … , 𝑠
𝑘
- pierwiastki jednokrotne 𝑠
0
≠ 𝑠
1
≠ 𝑠
2
≠ 𝑠
3
≠ ⋯ ≠ 𝑠
𝑘
≠ 𝑠
𝑘+1
≠ 𝑠
𝑘+𝑛
, zarówno
rzeczywiste jak i zespolone,
𝑠
𝑘+1
, 𝑠
𝑘+2
, 𝑠
𝑘+3
- przykładowo pierwiastki trzykrotne: 𝑚 = 3, 𝑠
𝑘+1
= 𝑠
𝑘+2
= 𝑠
𝑘+3
,
𝑠
𝑘+4
, 𝑠
𝑘+5
- przykładowo pierwiastki dwukrotne: 𝑙 = 2, 𝑠
𝑘+4
= 𝑠
𝑘+5
.
Podany przykład możliwych kombinacji pierwiastków oznacza, że 𝑛 = 𝑘 + 𝑚 + 𝑙. Z tablic
transformat można odczytać oryginały funkcji odpowiadające transformatom występującym w
zależności (3.18) i wynoszą one:
𝑦(𝑡) = 𝑥
𝑠𝑡
(𝐴
0
+ 𝐴
1
𝑒̅
𝑠
1
∙𝑡
+ 𝐴
2
𝑒̅
𝑠
2
∙𝑡
+ ⋯ + 𝐴
𝑘
𝑒̅
𝑠
𝑘
∙𝑡
+ 𝐵
1
𝑒̅
𝑠
𝑘+1
∙𝑡
+ 𝐵
2
𝑡 𝑒̅
𝑠
𝑘+1
∙𝑡
+ ⋯ +
𝐵
𝑚
∙ 𝑡
𝑚
𝑒̅
𝑠
𝑘+1
∙𝑡
+ ⋯ ).
(3.22)
W przypadku, gdyby pierwiastki 𝑠
1
, 𝑠
2
, … , 𝑠
𝑘
były rzeczywiste, to byłby koniec obliczeń.
Natomiast jeżeli występują pierwiastki zespolone sprężone, to należy pozbyć się z dziedziny czasu (z
równania 3.22) jednostek urojonych. Dla przybliżenia problemu pokazany zostanie dalszy tok
postępowania dla przypadku gdy 𝑘 = 5, 𝑚 = 3, 𝑙 = 2; pierwiastki pojedyncze wynoszą:
𝑠
1,2
= −𝛼
1,1
± 𝑗𝛽
1,2
𝑠
3,4
= −𝛼
3,4
± 𝑗𝛽
3,4
𝑠
5
= −𝑝
} .
(3.23)
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
8
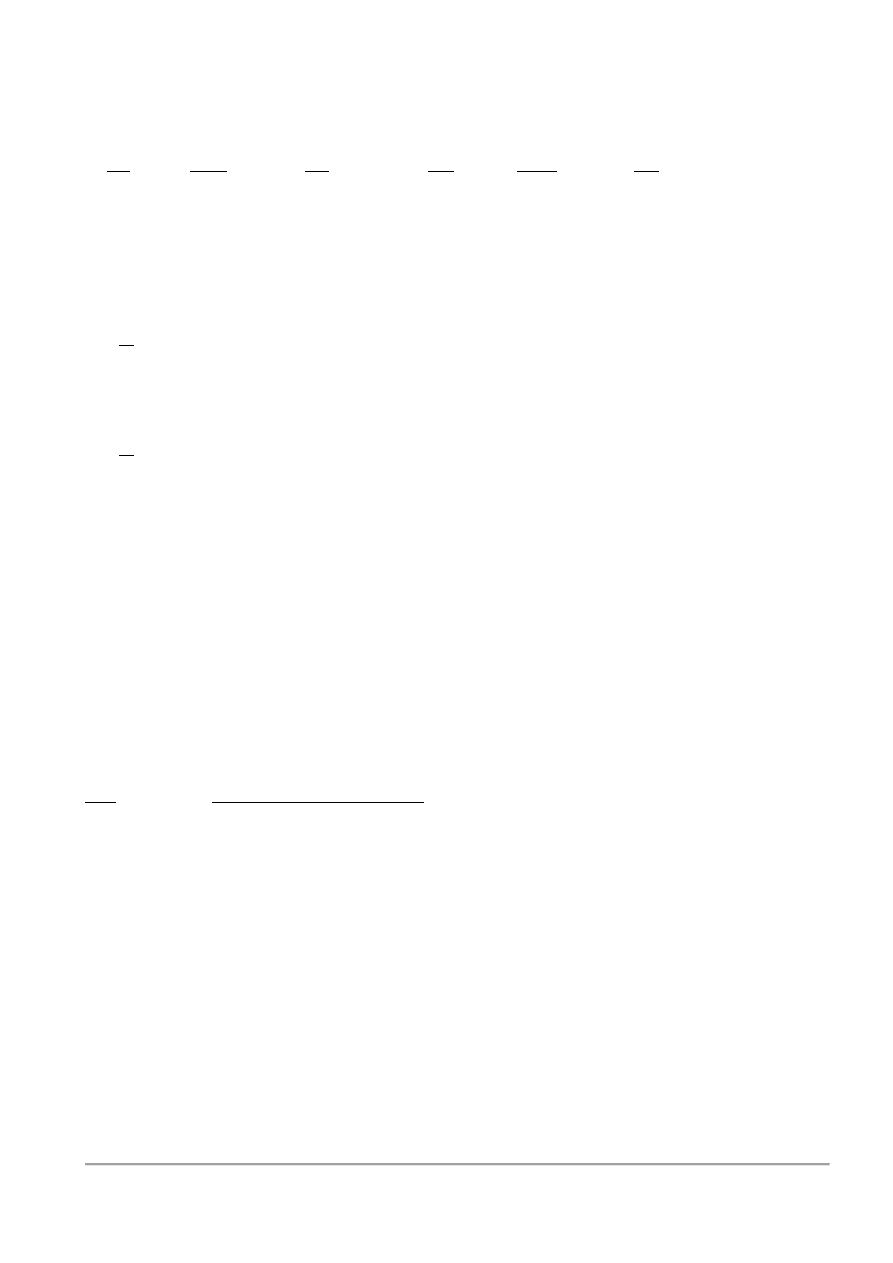
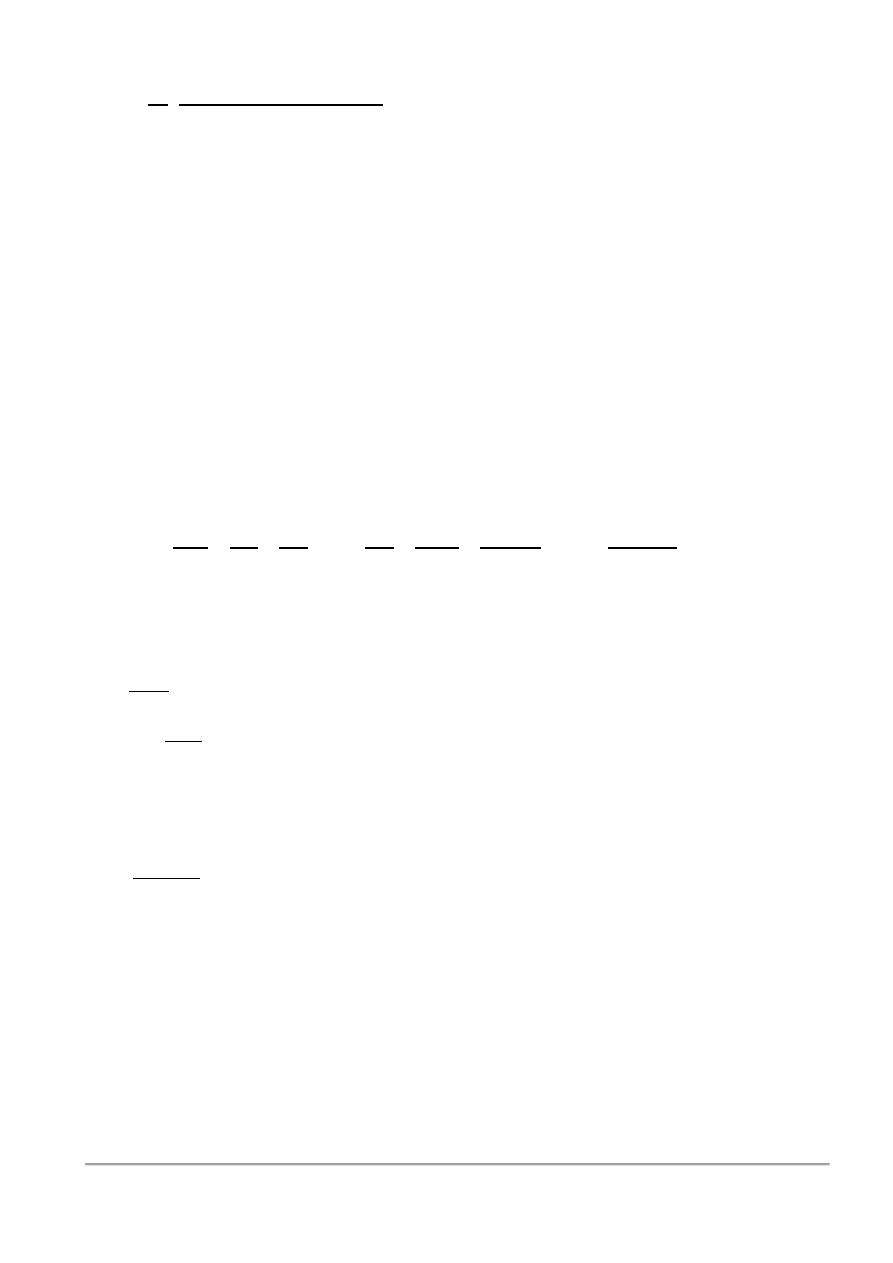
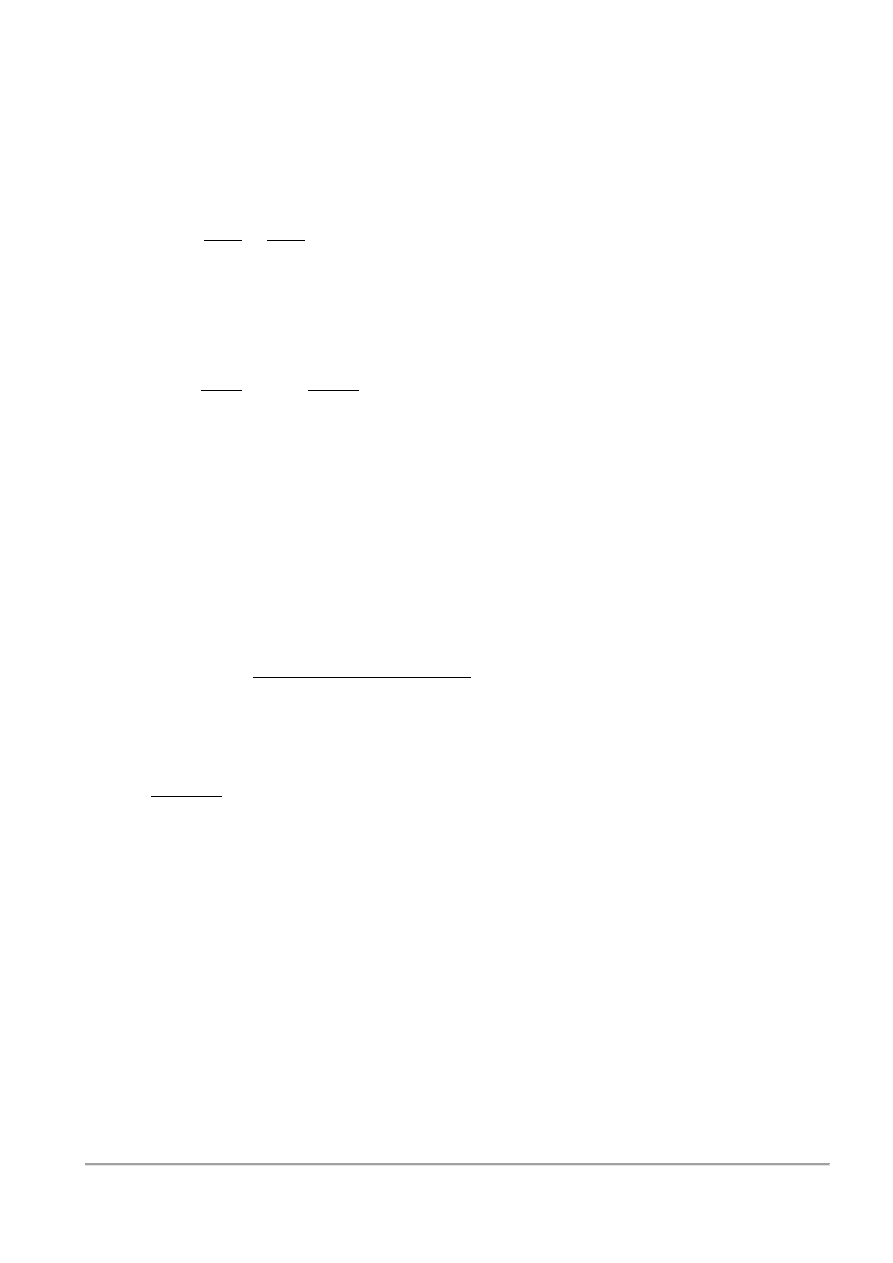
Niech rozpatrywane pierwiastki równania charakterystycznego układu (3.12) posiadają wartości
pokazane poglądowo na rys.3.2.
m
=
o1
n1
1,2
3,4
R =
e
s=s+j
1
o(1)
=
3
o(3)
=
2
o(2)
=
1-
1
2
1-
3
2
1-
2
2
4
0(4)
=
1-
4
2
1
o(1)
=
2
o(2)
=
s
1
s
3
s
5
s
7
s
6
s
8
s
10
s
4
s
2
-p
s
9
Rys.3.2. Przykładowe położenie pierwiastków (𝑠
1
≠ 𝑠
2
≠ 𝑠
3
≠ 𝑠
4
≠ 𝑠
5
≠ 𝑠
6
≠ 𝑠
9
, 𝑠
7
= 𝑠
8
, 𝑠
9
= 𝑠
10
,
𝑛 = 10, 𝑘 = 5, 𝑚 = 3, 𝑙 = 2) układu (3.12) na płaszczyźnie zespolonej 𝑠 = 𝜎 + 𝑗𝜔
W zależności (3.23) w rozpatrywanym przykładzie pierwiastki 𝑠
1
i 𝑠
2
oraz 𝑠
3
i 𝑠
4
są parami
zespolone sprężone. Po podstawieniu ich wartości wg (3.23) w zależności (3.22) pojawią się jednostki
urojone. Również współczynniki 𝐴
1
i 𝐴
2
oraz 𝐴
3
i 𝐴
4
będą zawierały jednostki urojone.
Rozpatrzone zostaną tylko pierwiastki 𝑠
1
i 𝑠
2
. Dla wyeliminowania jednostek urojonych
wykorzystany zostanie wzór Eulera. Do zależności (3.22) należy podstawić wartości pierwiastków (3.23)
oraz zapisać liczby 𝐴
1
i 𝐴
2
oraz 𝐴
3
i 𝐴
4
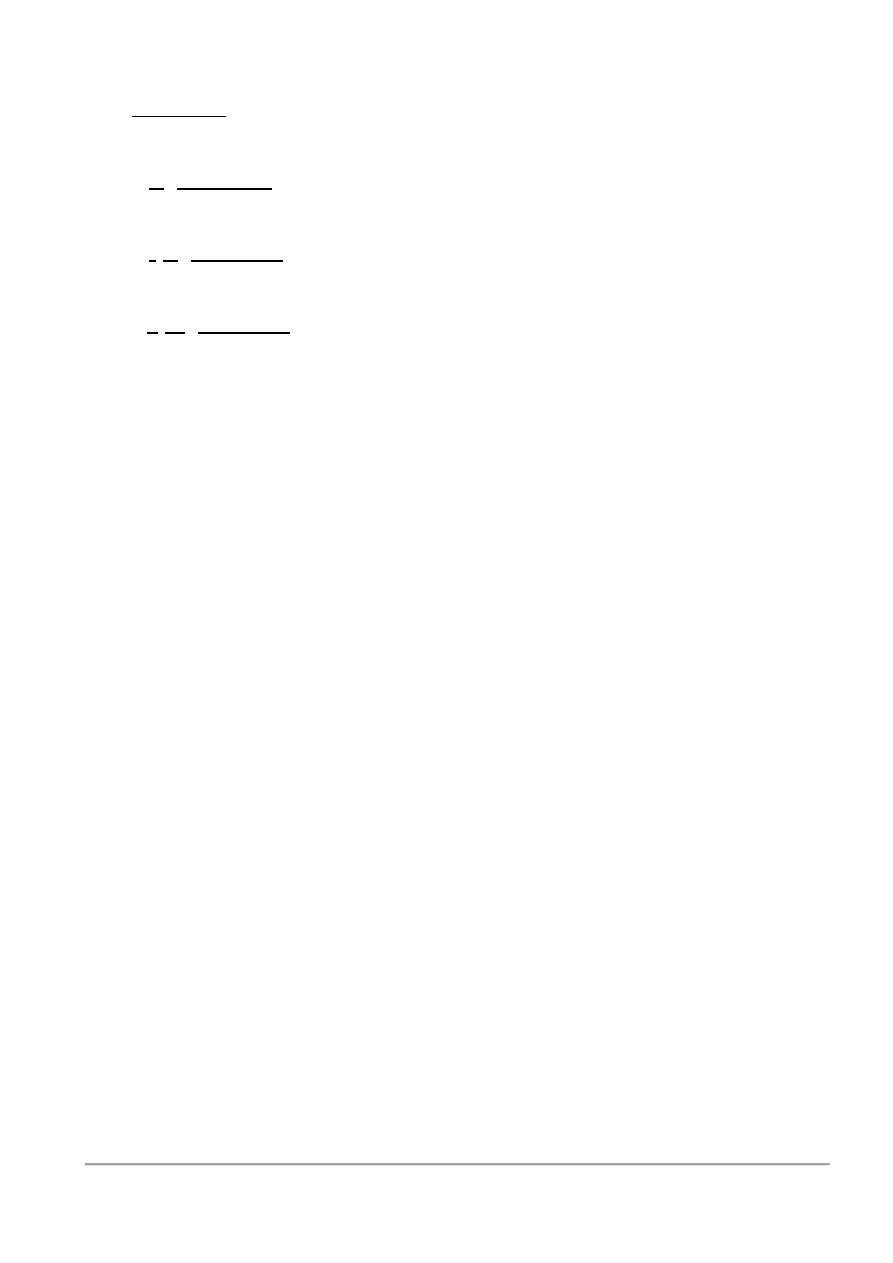
w postaci wykładniczej. Ze względu na ujemne części rzeczywiste
pierwiastków 𝑠
1
i 𝑠
2
oraz 𝑠
3
i 𝑠
4
obliczane z nich współczynniki 𝐴
1
i 𝐴
2
oraz 𝐴
3
i 𝐴
4
przyjmą wartości
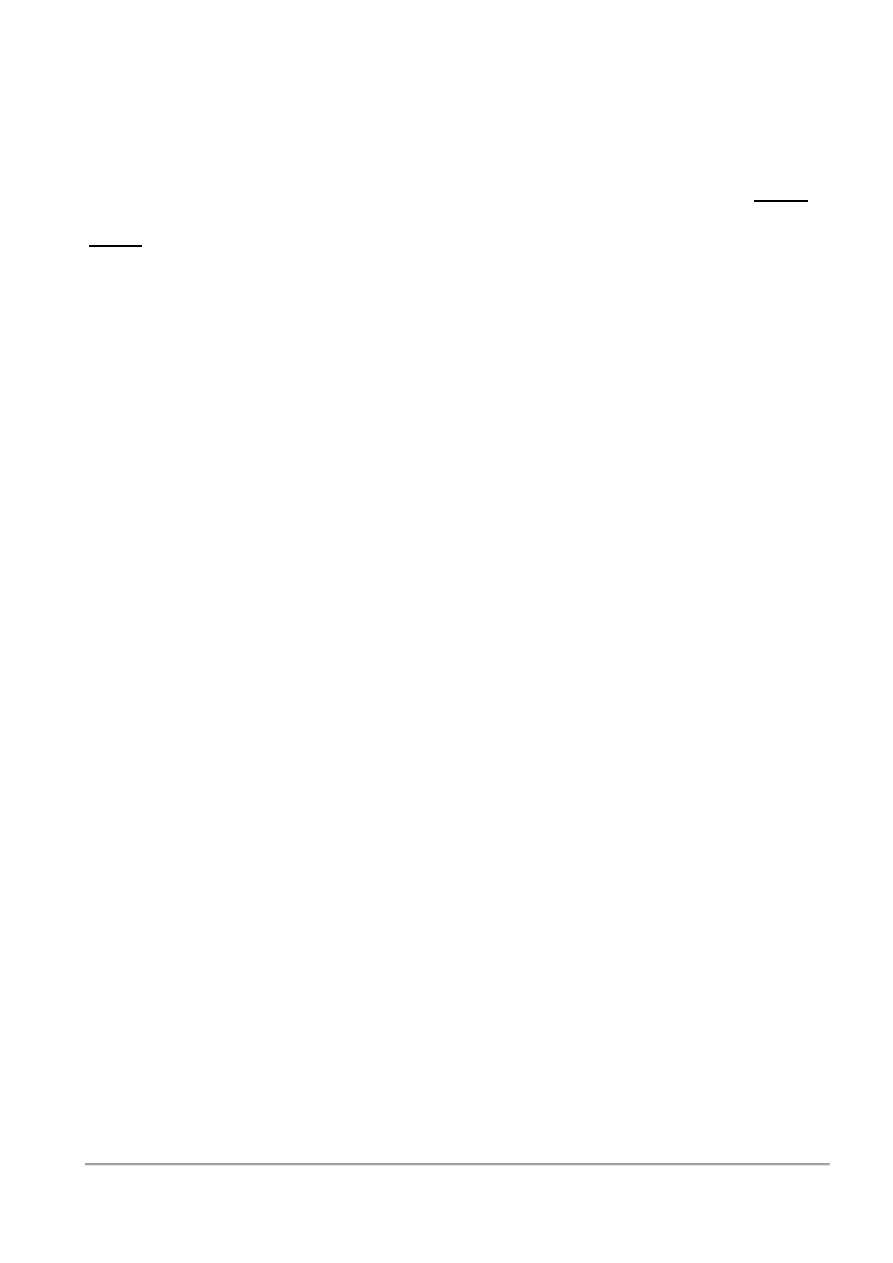
przedstawione poglądowo na rys.3.3.
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
9
J
m 1
A
J
m
- A
R
e
1
- A
R
e
2
Re
A
1
A
2
J
m 2
A
Rys.3.3. Położenie liczb 𝐴
1
i 𝐴
2
na płaszczyźnie zespolonej
gdzie:
𝐴
1
= |𝐴
1
| 𝑒
𝑗𝜑
1
,
𝐴
2
= |𝐴
2
| 𝑒̅
𝑗𝜑
2
,
|𝐴
1
| = |𝐴
2
| = √(𝑅
𝑒
𝐴
1
)
2
+ (𝐼
𝑚
𝐴
1
)
2
= |𝐴
1,2
| ,
𝑅
𝑒
𝐴
1
= −𝑅
𝑒
𝐴
2
,
𝐼
𝑚
𝐴
1
= −𝐼
𝑚
𝐴
2
,
|𝜑
1
| = |𝜑
2
| = 𝜑
1,2 ,
𝜑
1
= −𝜑
2
.
}
(3.24)
Otrzyma się:
𝐴
1
𝑒̅
𝑠
1
𝑡
+ 𝐴
2
𝑒̅
𝑠
2
𝑡
= |𝐴
1,2
| 𝑒
𝑗𝜑
1,2
𝑒
(−𝛼
1,2
+𝑗𝛽
1,2
) 𝑡
+ |𝐴
1,2
| 𝑒̅
𝑗𝜑
1,2
𝑒
(−𝛼
1,2
−𝑗𝛽
1,2
)𝑡
=
|𝐴
1,2
| 𝑒̅
𝛼
1,2
𝑡
(𝑒
𝑗𝜑
1,2
𝑒
𝑗𝛽
1,2
𝑡
+ 𝑒
−𝑗𝜑
1,2
𝑒
−𝑗𝛽
1,2
𝑡
) = |𝐴
1,2
| 𝑒̅
𝛼
1,2
𝑡
(𝑒
𝑗 (𝛽
1,2
𝑡+𝜑
1,2
+ 𝑒̅
𝑗(𝛽
1,2
𝑡+𝜑
1,2)
) =
0,5 |𝐴
1,2
| 𝑒̅
𝛼
1,2
cos (𝛽
1,2
𝑡 + 𝜑
1,2
) .
(3.25)
𝑒
𝑗(𝛽
1,2
𝑡+𝜑
1,2
)
+ 𝑒̅
𝑗 (𝛽
1,2
𝑡+𝜑
1,2
)
= 0,5 cos(𝛽
1,2
𝑡 + 𝜑
1,2
) .
(3.26)
Podobny wynik otrzyma się dla liczb 𝑠
3
i 𝑠
4
oraz 𝐴
3
i 𝐴
4
.
Ze względu na sens fizyczny, wynikający z właściwości oscylacyjnych elementarnych procesów,
przyjęte wcześniej w zależnościach (3.23), oznaczenia zastąpione zostaną w sposób:

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
10
𝛼
1,2
= 𝜎
1,2
= 𝜉
1
𝜔
0(1)
𝛽
1,2
= 𝜔
1,2
= 𝜔
0(1)
√1 − 𝜉
1
2
𝛼
3,4
= 𝜎
3,4
= 𝜉
2
𝜔
0(2)
𝛽
3,4
= 𝜔
3,4
= 𝜔
0(2)
√1 − 𝜉
2
2
}
.
(3.27)
gdzie:
𝜉
1
, 𝜉
2
– tłumienia względne 0 < 𝜉 ≤ 1,
𝜔
0(1)
, 𝜔
0(2)
– częstości drgań własnych (naturalne).
Ostatecznie zależność (3.22), dla przyjętych przykładowo pierwiastków układu (3.12) i oznaczeń (3.27),
przyjmuje postać:
𝑦(𝑡) = 𝑥
𝑠𝑡
[𝐴
0
+ 0,5 |𝐴
1,2
|𝑒̅
𝜉
1
𝜔
𝑜(1)
𝑡
cos (𝜔
0(1)
√1 − 𝜉
1
2
𝑡 + 𝜑
1,2
) + 0,5 |𝐴
3,4
| ∙
𝑒̅
𝜉
2
𝜔
0(1)
𝑡
cos (𝜔
0(2)
√1 − 𝜉
2
2
𝑡 + 𝜑
3,4
) + 𝐴
5
𝑒̅
𝑠
5
𝑡
+ 𝐵
1
𝑒̅
𝑠
6
𝑡
+ 𝑡 ∙ 𝐵
2
𝑒̅
𝑠
7
𝑡
+ 𝑡
2
𝐵
3
𝑒̅
𝑠
8
𝑡
+ 𝐶
1
𝑒̅
𝑠
9
𝑡
+ 𝐶
2
𝑒̅
𝑠
10
𝑡
].
(3.28)
Stałe 𝐴
𝑘
, 𝐵
𝑚
i 𝐶
𝑙
(𝑘=1,2,…,5, 𝑚=1,2,3; 𝑙 =1,2 oblicza się z zależności (3.20) i (3.22).
Otrzymana odpowiedź układu, w postaci ogólnej, składa się z następujących funkcji
elementarnych: przebiegu skokowego o wartości 𝐴
0
, 6. zanikających funkcji wykładniczych (stałe
𝐴
5
, 𝐵
1
, 𝐵
2
, 𝐵
3
, 𝐶
1
i 𝐶
2
będą miały znaki ujemne) oraz dwóch wykładniczo-malejących funkcji
harmonicznych o częstościach tłumionych 𝜔
1
i 𝜔
2
(𝜔
1
= 𝜔
0(1)
√1 − 𝜉
1
2
, 𝜔
2
= 𝜔
0(1)
√1 − 𝜉
2
2
)
powstałych z pierwiastków zespolonych sprzężonych 𝑠
1
i 𝑠
2
oraz 𝑠
3
i 𝑠
4
. Zależność (3.28) można
również przedstawić z użyciem funkcji sinus, jeżeli kąty rozwarte 𝜓
1,2
= 90° + 𝜓
1,2
i 𝜓
3,4
= 90° + 𝜓
3,4
zastąpi się kątami ostrymi 𝜓
1,2
i 𝜓
3,4
. Części rzeczywiste pierwiastków równania charakterystycznego
w rozpatrywanym przypadku mają wartości ujemne o różnych wartościach; są wykładnikami funkcji
wykładniczych. Prędkość zanikania (w funkcji czasu) funkcji wykładniczych zależy od wartości
wspomnianych części rzeczywistych pierwiastków. Duże wartości powodują szybkie zanikanie, a małe
wartości wolne zanikanie. Najbardziej znaczący (widoczny) w przebiegu 𝑦(𝑡) będzie wpływ części
rzeczywistych pierwiastków leżących najbliżej osi urojonej (patrz rys.3.2) tj. 𝛼
1,2
i ewentualnie 𝛼
3,4
.
Wpływ pierwiastków 𝑠
10
, 𝑠
9
, 𝑠
8
, 𝑠
7
, 𝑠
6
i 𝑠
5
na 𝑦(𝑡) w praktyce może nie być widoczny. Pierwiastki te

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
11
mogą w niewielkim stopniu zniekształcić początkowy przebieg funkcji 𝑦(𝑡), szczególnie gdy wartość
pierwiastka |𝑠
5
| jest co najmniej dwukrotnie większa od wartości [𝛼
3,4
] i mogą być pominięte.
𝑦(𝑡) ≈ 𝑥
𝑠𝑡
[𝐴
0
+ 0,5 |𝐴
1,2
|𝑒̅
𝜉
1
𝜔
𝑜(1)
𝑡
cos(𝜔𝑡 + 𝜑
1,2
) + 0,5 |𝐴
3,4
| 𝑒̅
𝜉
2
𝜔
0(2)
𝑡
cos(𝜔
2
𝑡 + 𝜑
3,4
)]
(3.29)
Jeżeli [𝛼
3,4
] jest ponad dwukrotnie większa od [𝛼
1,2
], to zależność (3.29) może być uproszczona do
postaci zawierającej współczynnik 𝐴
0
oraz człon ze współczynnikiem |𝐴
1,2
|.
Przedstawione rozwiązanie 𝑦(𝑡) można uogólnić następująco:
Rozwiązania składają się z sum wykładniczych, co wynika z teorii równań różniczkowych.
Funkcje wykładnicze o postaci 𝑒
𝑠
𝑖
𝑡
, 𝑖 = 1,2, .. , 𝑘 nazywają się modami układu.
Przypadek pierwiastka wielokrotnego daje wyrażenia reprezentujące mody o postaci
𝑒
𝑠
𝑖
𝑡
, 𝑡𝑒
𝑠
𝑖
𝑡
,
𝑡
2
𝑒
𝑠𝑖𝑡
2!
, … ,
𝑡
𝑚−1
𝑒
𝑠𝑖𝑡
(𝑚−1)!
,
(3.30)
gdzie:
𝑚 – jest krotnością pierwiastka.
Para biegunów zespolonych sprężonych:
𝑠
𝑖
= −𝜎 + 𝑗𝜔 ,
𝑠
𝑖+1
= −𝜎 − 𝑗𝜔 ,
(3.31)
dla 𝜎 – rzeczywiste i 𝜔 – rzeczywiste i niezerowe, prowadzi do postaci modu oscylacyjnego
𝑒̅
𝜎𝑡
sin (𝜔𝑡 + 𝜑),
(3.32)
gdzie:
𝜑 – kąt fazowy
𝜎 = 𝜉𝜔
0
- równoważna stała czasowa.
(3.33)
Przestawionej w ogólnym rozwiązaniu odpowiedzi układu, rozkład transmitancji operatorowej
(3.16) na ułamki proste (3.18), posiada interesującą interpretację. Występująca w (3.18) suma
ułamków prostych transmitancji operatorowej (3.16) o postaci:
𝐺(𝑠) =
𝐿(𝑠)
𝑀(𝑠)
=
𝐴
1
𝑠−𝑠
1
+
𝐴
2
𝑠−𝑠
2
+ ⋯ ,
𝐴
𝑘
𝑠−𝑠
𝑘
(3.34)

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
12
jest sumą równań pierwszego rzędu, o wyjściach z elementów całkujących, które są współrzędnymi
stanu tego układu.
Stałe rozkładu (współczynniki) 𝐴
1
, 𝐴
2
, … , 𝐴
𝑘
nazywają się residuami rozpatrywanej
transmitancji 𝐺(𝑠) w punktach 𝑠
1
, 𝑠
2
, … , 𝑠
𝑘
.
Dalej zostaną przedstawione formy graficzne zapisu (3.34).
Odpowiedź impulsowa
Dla przypadku ogólnego charakterystyki impulsowej układu, otrzymuje się:
𝑥(0
+
) = 0, 𝑥(𝑡) = 𝛿(𝑡),
𝑥̇(0
+
) = 0, 𝑋(𝑠) = 1,
⋮
(𝑛)
𝑋
(0
+
) = 0.
𝑌(𝑠) =
𝑏
𝑛
𝑠
𝑛
+𝑏
𝑛−1
𝑠
𝑛−1
+ ⋯ 𝑏
1
𝑠+𝑏
0
𝑎
𝑚
𝑠
𝑚
+𝑎
𝑚−1
𝑠
𝑚−1
+ ⋯ 𝑎
1
𝑠+𝑎
0
=
𝐿(𝑠)
𝑀(𝑠)
,
𝑚 ≥ 𝑛 .
gdzie:
𝐿(𝑠) - licznik transmitancji operatorowej układu 𝐺(𝑠),
𝑀(𝑠) - mianownik transmitancji operatorowej 𝐺(𝑠),
𝑀(𝑠) = 0 - równanie charakterystyczne rozpatrywanego układu rzędu „𝑚”.
Ponieważ równanie 𝑀(𝑠) = 0 jest „𝑛”-tego rzędu, to posiada 𝑛 wartości własnych
(pierwiastków). Wartości własne 𝑠
1
, 𝑠
2
, … , 𝑠
𝑛
równania charakterystycznego układu opisanego przez
transmitancję operatorową 𝐺(𝑠), o czym już była mowa, nazywają się biegunami.
Licznik 𝐿(𝑠) transmitancji operatorowej 𝐺(𝑠) przyrównamy do zera:
𝐿(𝑠) = 0,
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
13
posiada rząd 𝑚 (𝑚 ≤ 𝑛). Wartości własne 𝑠
1
0
, 𝑠
2
0
, . .. 𝑠
𝑛
0
tak utworzonego równania nazywają się
zerami transmitancji operatorowej. Bieguny 𝑠
1
, 𝑠
2
, … , 𝑠
𝑛
oraz zera 𝑠
1
0
, 𝑠
2
0
, . .. 𝑠
𝑚
0
transmitancji
operatorowej mogą posiadać różne kombinacje wartości: mogą to być wartości pojedyncze i
wielokrotne, rzeczywiste lub zespolone (zespolone występują parami jako sprzężone ze sobą). Dla
przejrzystości wygodnie jest zarówno bieguny jak i zera transmitancji operatorowej przedstawić
graficznie na płaszczyźnie zespolonej (patrz rys.3.2).
Ogólną zależność obliczanej odpowiedzi impulsowej układu można przedstawić w sposób
zawierający postać kanoniczną transmitancji operatorowej 𝐺(𝑠) następująco:
𝑌(𝑠) = 1 ∙ 𝑘
Π (1+𝑇
𝑗
𝑠) Π [1 + 2𝜉
𝑗
(𝑇
𝑗
𝑠) + (𝑇
𝑗
𝑠)
2
]
𝑆
𝑁
+Π (1+𝑇
𝑖
𝑠) Π [1 + 2𝜉
𝑖
(𝑇
𝑖
𝑠) + (𝑇
𝑖
𝑠)
2
]
,
gdzie:
𝑘 − wzmocnienie statyczne układu,
𝑇
𝑖
, 𝑇
𝑗
- są to stałe czasowe,
𝜉
𝑖
, 𝜉
𝑗
- współczynniki tłumienia (𝜉 < 1),
𝑁 - liczba biegunów w początku układu współrzędnych (𝑠
𝑖
=0),
𝑇
𝑗
= − 1 𝑠
𝑗
0
⁄ dla 𝑚′ zer rzeczywistych,
𝑇
𝑖
= − 1 𝑠
𝑖
⁄ dla 𝑛′ biegunów rzeczywistych,
𝑇
𝑗
2
= 1(𝛼
𝑗
2
+ 𝛽
𝑗
2
) =
1
𝜔
𝑗
2
dla 𝑚 − 𝑚′ zer zespolonych sprzężonych,
𝑇
𝑖
2
= 1(𝛼
𝑖
2
+ 𝛽
𝑖
2
) =
1
𝜔
𝑖
2
dla 𝑛 − 𝑛′ biegunów zespolonych sprzężonych,
𝑘 = 𝐾 (
Π
1
m
T
j
Π
1
𝑛
T
i
⁄
),
𝜉
𝑗
=
𝑎
𝑗
√𝛼
𝑗
2
+ 𝛽
𝑗
2
⁄
dla 𝑚 − 𝑚′ zer zespolonych sprzężonych,
𝜉
𝑖
= 𝑎
𝑖
√𝛼
𝑖
2
+ 𝛽
𝑖
2
⁄
dla 𝑛 − 𝑛′ biegunów zespolonych sprzężonych,
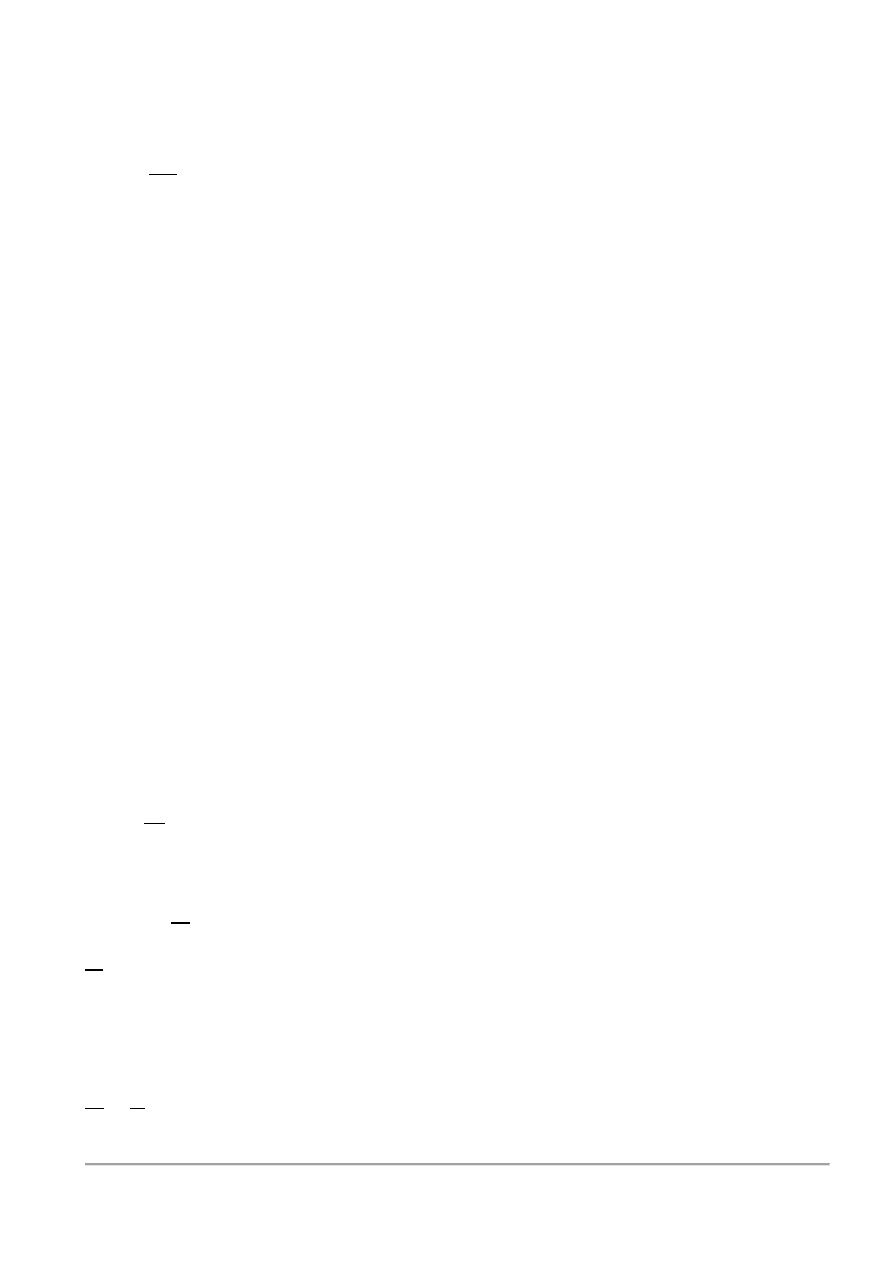
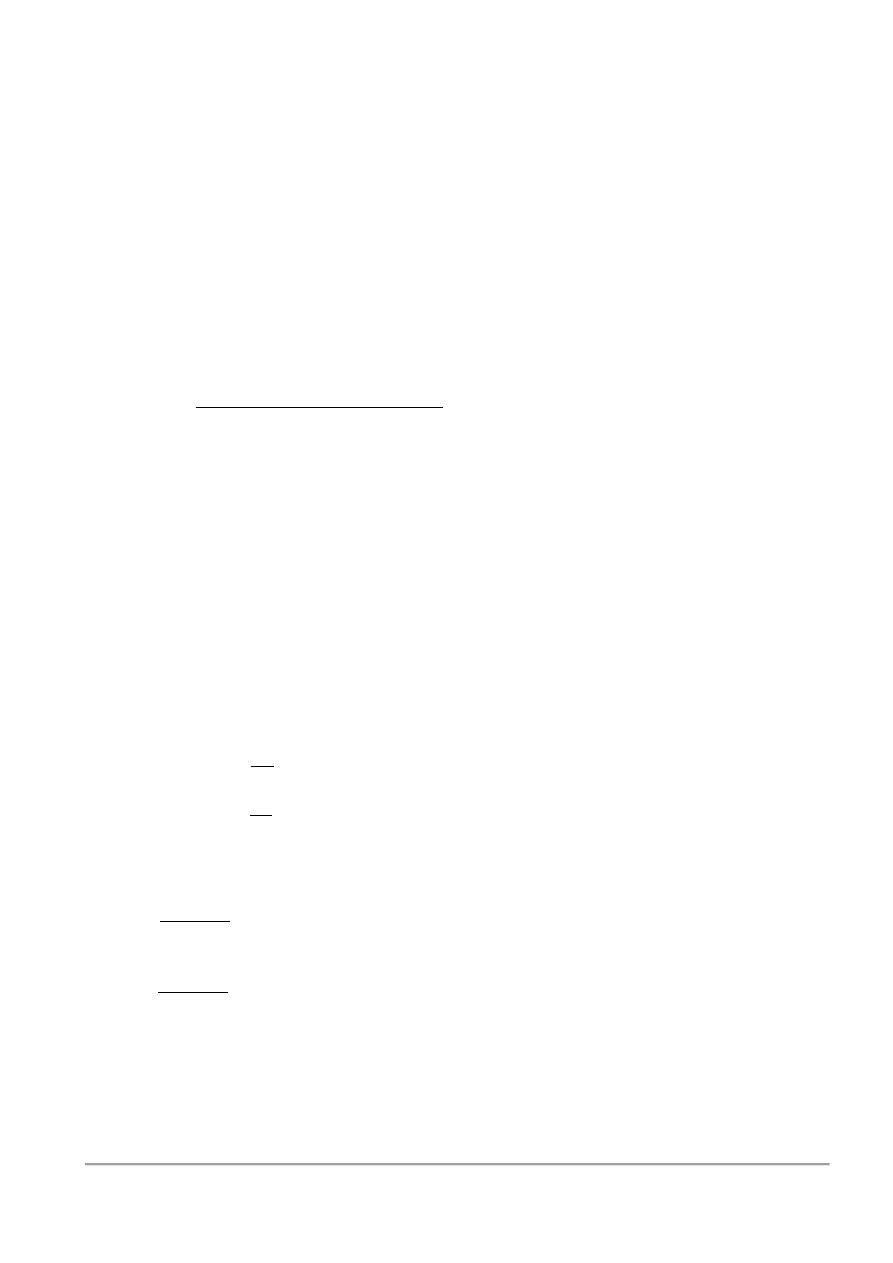
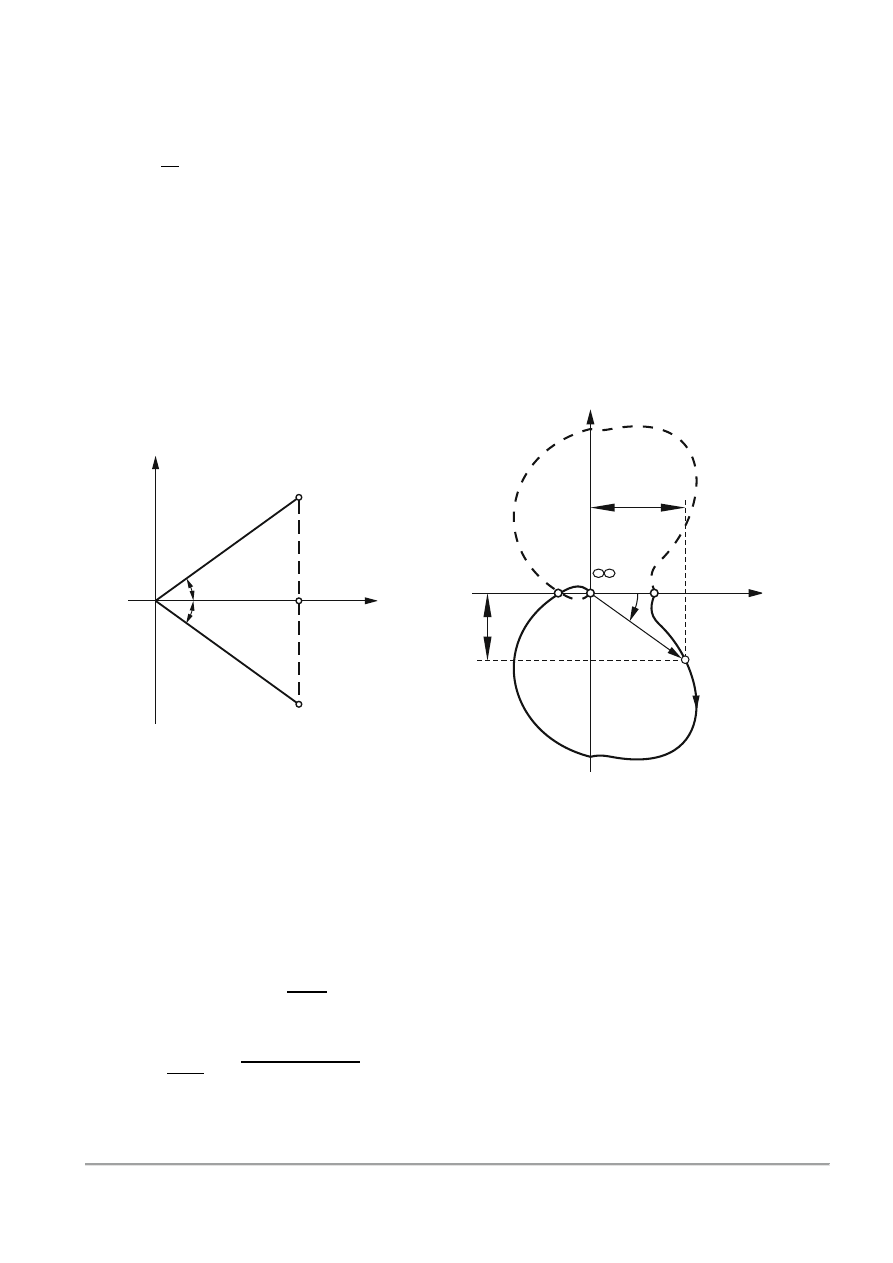
Kształt odpowiedzi impulsowej 𝑦(𝑡) układu zależy od położenia wartości własnych
𝑠
𝑖
(biegunów) na płaszczyźnie zespolonej. Każda "para" wartości własnych zespolonych sprzężonych
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
14
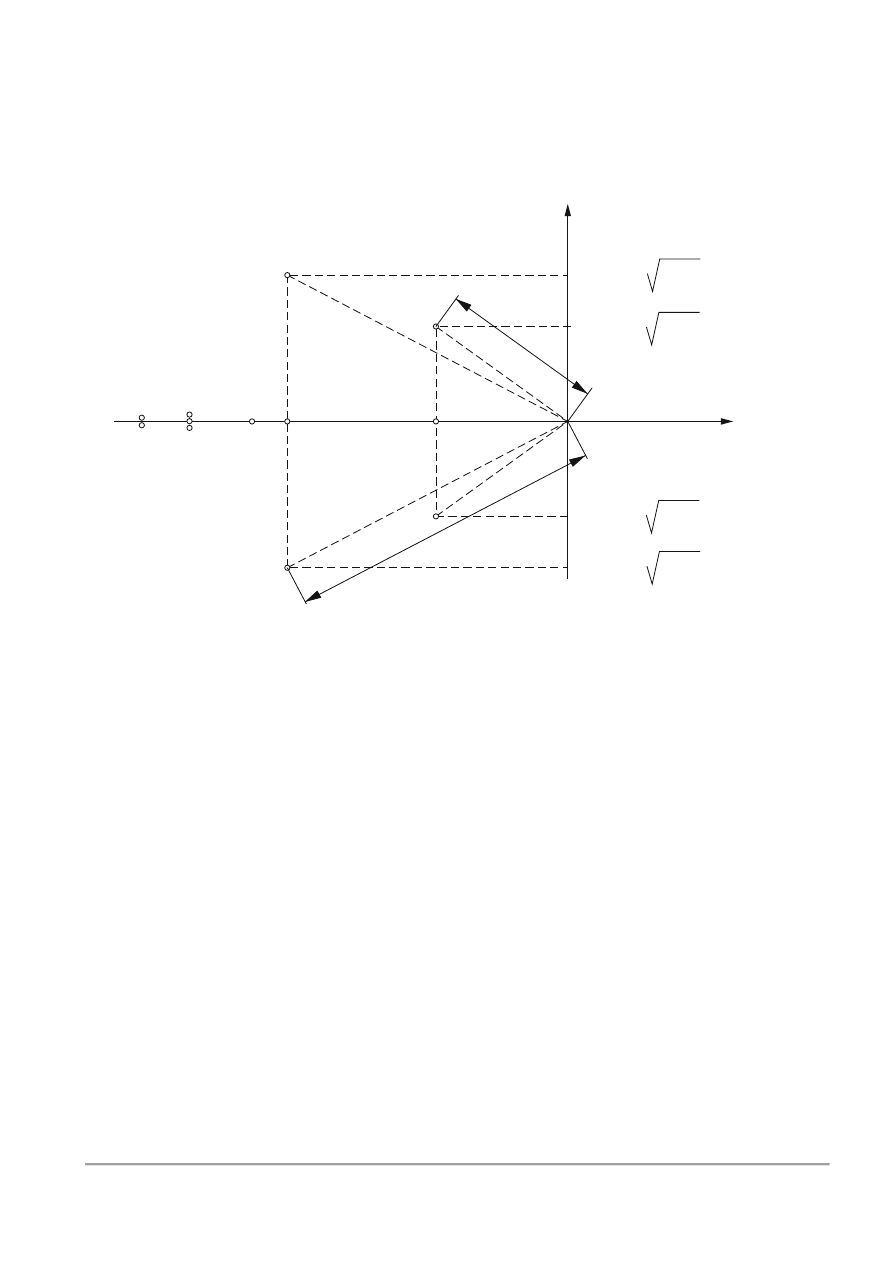
daje w wyniku jedną odpowiedź impulsową oscylacyjną (patrz obliczanie odpowiedzi skokowej),
narysowaną dwukrotnie na rys.3.4- przy każdym punkcie oddzielnie. Jeżeli rozważany pierwiastek
(biegun) pojawia się w równaniu charakterystycznym z krotnością 𝑘, to wówczas należy pomnożyć
odpowiedź przez (𝑡𝑘/𝑘!).
Re=
Płaszczyzna
s=
j
I
m=
0
0
0
cos
o
P
P
‚
Rys.3.4. Odpowiedzi impulsowe układu w zależności od położenia pierwiastka (bieguna) na
płaszczyźnie zespolonej 𝑠 (obok każdego 𝒙 przedstawiono przebieg odpowiedzi impulsowej)
Przykładowo, para pierwiastków (biegunów) zespolonych sprzężonych (to układ II rzędu, tj.
𝑛 = 2) jest położona w punktach 𝑃 i 𝑃' na rys. 3.4, mających część rzeczywistą −𝛼 = −𝜉𝜔
𝑜
i część
urojoną ±𝛽 = 𝜔
𝑜
√1 − 𝜉
2
. Przeciwprostokątna 𝑂𝑃 trójkąta 𝑂𝐴𝑃 równa się 𝜔
0
i jest to nietłumiona
część własna odpowiedzi. Kąt 𝐴𝑂𝑃 wynosi:
Θ = −𝑎𝑟𝑐 cos 𝜉.
Wnioski wynikające z rys. 3.4.

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
15
1. Wszystkie wartości własne, o dowolnej krotności, leżące w lewej półpłaszczyźnie, prowadzą do
odpowiedzi, które zanikają w czasie. Im dalej od osi urojonej leżą one w lewej półpłaszczyźnie, tym
szybciej zanikają odpowiedzi. Stała czasowa odpowiedzi, lub obwiedni odpowiedzi, równa się
odwrotności części rzeczywistej wartości własnej ze znakiem ujemnym. Zatem wszystkie wartości
własne leżące wzdłuż danej prostej do osi rzeczywistej mają tę samą stałą czasową.
2. Wszystkie wartości własne pojedyncze, leżące na osi urojonej, prowadzą do odpowiedzi o stałej
amplitudzie (tj. na granicy stabilności). Dla krotności większej niż jeden, odpowiedź rośnie z czasem i
nie jest stabilna.
3. Wszystkie wartości własne w prawej półpłaszczyźnie, prowadzą do odpowiedzi rosnącej
nieograniczonej i wskazują zatem na to, że rozpatrywane układy są niestabilne.
4. Wszystkie wartości własne, leżące wzdłuż tej samej linii poziomej mają taką samą częstotliwość
oscylacji tłumionych 𝐵 = 𝜔
0
√1 − 𝜉
2
, pojawiającą się w odpowiedzi. Im dalej od osi rzeczywistej leżą
wartości własne, tym większe są częstotliwości odpowiedzi.
5. Wszystkie wartości własne leżące wzdłuż tego samego promienia wychodzącego z początku układu
współrzędnych mają ten sam współczynnik tłumienia. Wszystkie takie wartości własne będą zatem
wskazywać na to, że stosunek dwu kolejnych amplitud odpowiedzi oscylacyjnej jest stały. Z drugiej
strony wszystkie takie wartości własne będą dawać w wyniku tę samą całkowitą liczbę oscylacji zanim
odpowiedź wygaśnie.
6. W przypadku układu wyższego rzędu można stosować superpozycję i odpowiedź impulsowa równa
się wtedy sumie poszczególnych odpowiedzi zaznaczonych na rys. 4.4. Aby móc powiedzieć, że układ
ma dominującą odpowiedź drugiego rzędu, rozmieszczenie wartości własnych musi być następująca:
dwie wartości własne zespolone sprzężone muszą leżeć stosunkowo blisko osi urojonej, podczas gdy
wszystkie pozostałe muszą leżeć daleko w lewej półpłaszczyźnie. Im dalsza jest ta separacja, tym lepsza
jest aproksymacja odpowiedzi układu przez dominującą odpowiedź drugiego rzędu.

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
16
Z przedstawionej analizy wynika, że jest możliwe przewidywanie przemieszczania się wartości
własnych układu w funkcji głównych parametrów. Określone położenie wartości własnych układu, to
ściśle odpowiadający temu przebieg czasowy odpowiedzi układu, z którego wynikają określone
wskaźniki jakości. Na tej podstawie powstała graficzna metoda konstruowania wykresu miejsc
geometrycznych wartości własnych układu (metoda projektowania układu) opracowana przez W.R.
Evansa [Evans, W.R. Control System Dynamics. New York: McGraw-Hill, 1953].
3.3. Charakterystyki dynamiczne częstotliwościowe
Charakterystyki dynamiczne częstotliwościowe są elementem tzw. analizy częstotliwościowej
sygnałów, której ogólne podstawy przedstawione zostały w punkcie „Opis matematyczny sygnałów”,
w szczególności w opisie sygnału okresowego w szeregu Fouriera.
Charakterystyki częstotliwościowe należą do grupy dynamicznych. Określają zachowanie układu
w sinusoidalnym stanie ustalonym. Jeżeli na wejście układu liniowego i stacjonarnego zostanie
wprowadzony sygnał sinusoidalny, to po wygaśnięciu stanów przejściowych na wyjściu pojawi się
również sygnał sinusoidalny o tej samej częstotliwości. W ogólnym przypadku sygnał wyjściowy będzie
posiadał inną amplitudę niż sygnał wejściowy i będzie opóźniony w fazie. Układ można w zupełności
opisać wykorzystując podane zachowanie, a mianowicie przedstawiając stosunek amplitudy na wyjściu
do amplitudy na wejściu i różnicy faz w całym zakresie częstotliwości wymuszającej od zera do
nieskończoności.
Charakterystyki częstotliwościowe mogą być zdejmowane eksperymentalnie i na ich podstawie
można dokonywać identyfikacji właściwości dynamicznych procesów. Ze względu na jednoznaczność
między formą graficzną opisu procesów wyrażoną przez charakterystyki częstotliwościowe i formą
analityczną, w postaci operatorowej, znając tę drugą formę można wykreślić charakterystyki
częstotliwościowe dowolnych procesów. Są bardzo ważnym i wygodnym narzędziem
wykorzystywanym w syntezie układów sterowania.
Podstawy teoretyczne
Za stan sinusoidalny uznaje się stan, w którym wszystkie procesy przejściowe zakończyły się –
wygasły. Z obserwacji liniowych, stacjonarnych układów wynika, że jeżeli na wejście wprowadzi się
wymuszenie sinusoidalne:
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
17
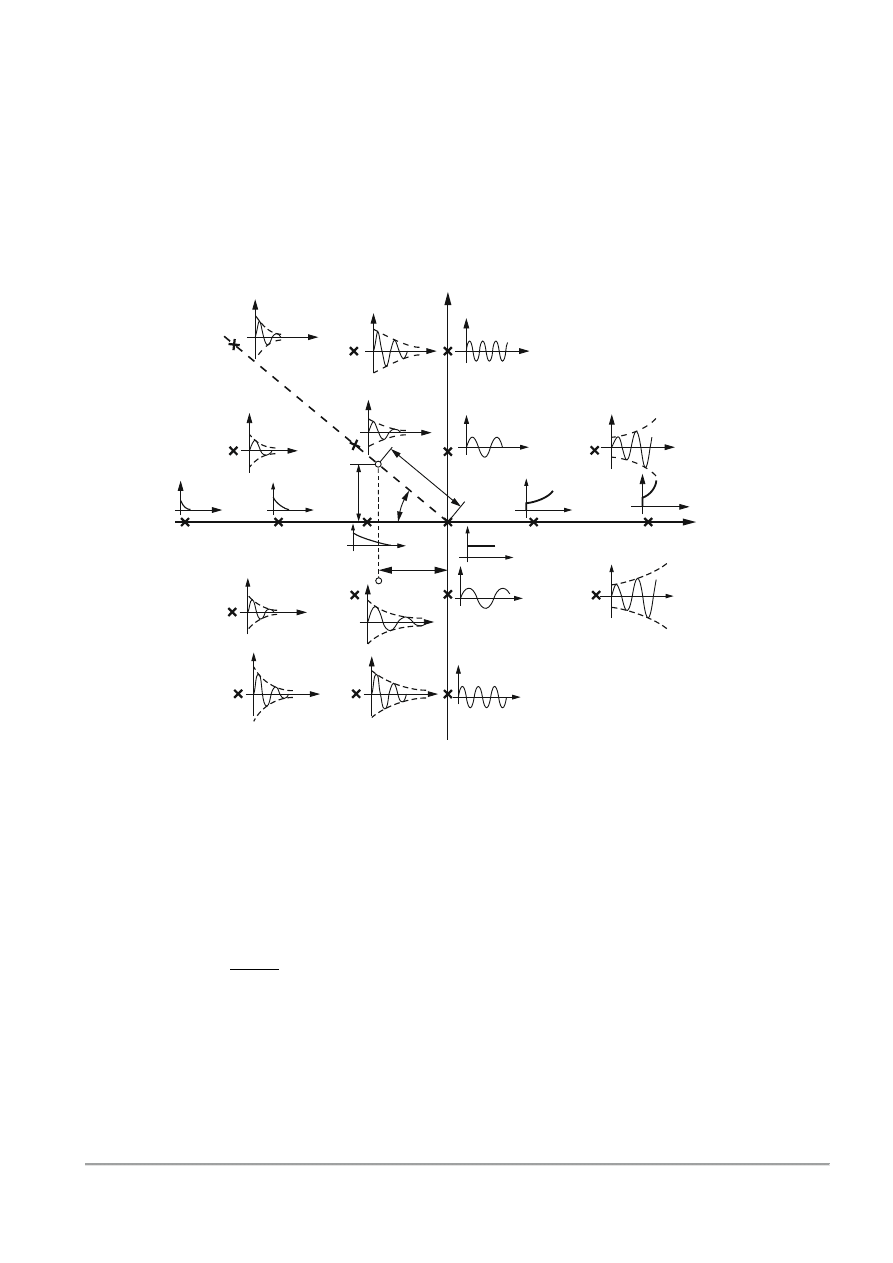
𝑥(𝑡) = 𝐴
𝑥
sin 𝜔𝑡,
(3.35)
to po pewnym czasie na wyjściu pojawi się również sygnał sinusoidalny o postaci:
𝑦(𝑡) = 𝐴
𝑦
sin(𝜔𝑡 + 𝜑).
(3.36)
Dalej zostanie wykazane, że odpowiedź układu będzie miała postać (3.36).
Ax
Ay
t
t
x
y
0
0
2
T=
2
T=
Rys.3.5. Przebiegi wejściowe 𝑥(𝑡) i wyjściowe 𝑦(𝑡) układu w stanie ustalonym dla wymuszenia
sinusoidalnego
Wykonując eksperyment, dla różnych częstości wymuszenia, oraz odnotowując wartości 𝐴
𝑥
, 𝐴
𝑦
oraz 𝜑:
𝜑 = 2𝜋
𝜏
𝑇
,
𝜑 = 𝜔𝜏 [rad] .
(3.37)
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
18
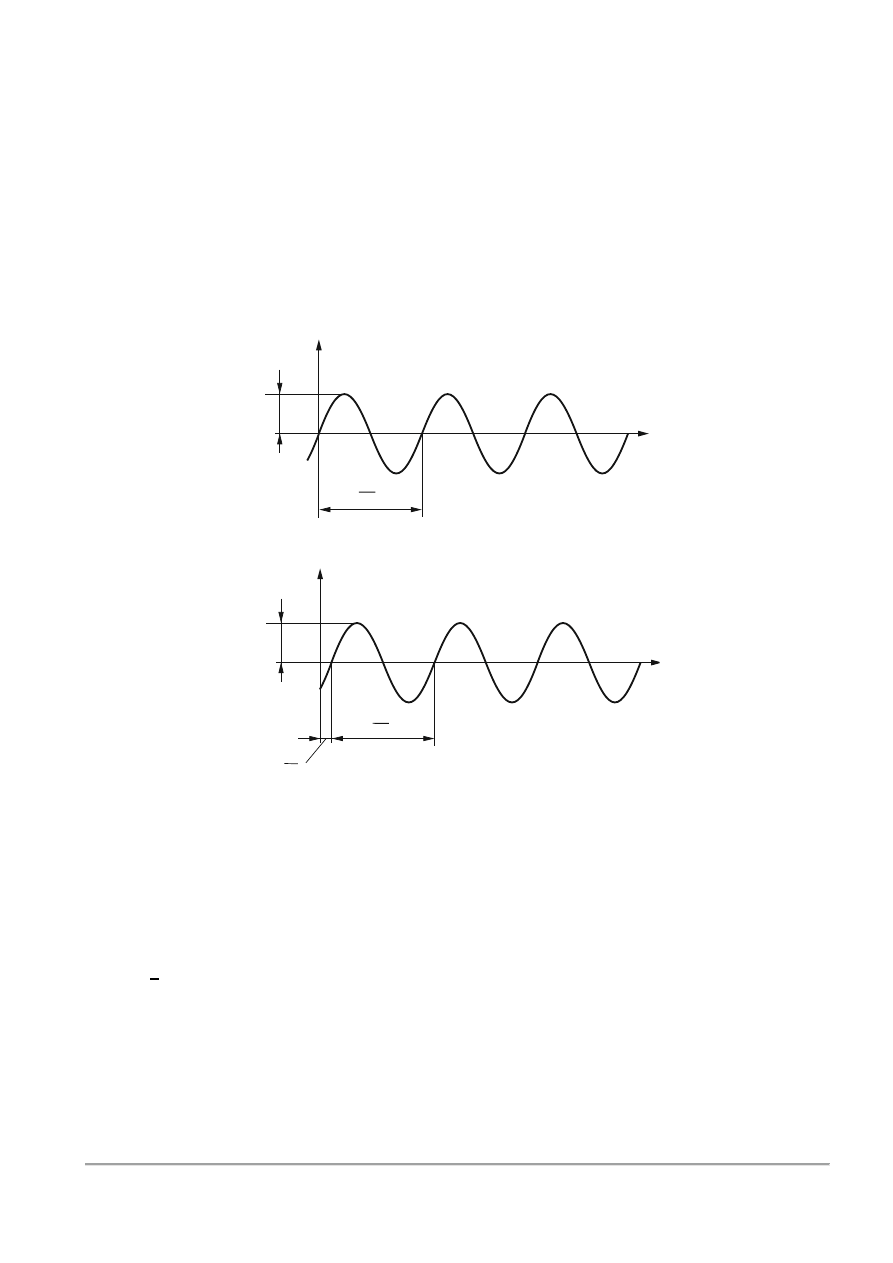
można sporządzić charakterystyki we współrzędnych liniowych, przedstawiające zmiany stosunku
amplitud
𝐴
𝑦
(𝜔)
𝐴
𝑥
(𝜔)
= 𝑀(𝜔)
i przesunięcia fazowego 𝜑(𝜔) w funkcji częstotliwości 𝜔 badanego układu.
Poglądowo taką charakterystykę przedstawia rys.3.6.
M(
Ay
Ax
2
0
Rys.3.6. Poglądowy przebieg charakterystyki 𝑀(𝜔) i 𝜑(𝜔) we współrzędnych liniowych
Interesujący jest formalny związek między tak otrzymanymi sygnałami 𝑥(𝑡) i 𝑦(𝑡). Z definicji
transmitancji operatorowej układu wynika:
𝐺(𝑠) =
𝑌(𝑠)
𝑋(𝑠)
=
𝐿 [𝐴
𝑦
sin (𝜔𝑡+𝜑)
𝐿 [𝐴
𝑥
sin 𝜔𝑡]
.
(3.38)
Wielkości 𝐴
𝑥
i 𝐴
𝑦
są stałymi, a sygnały (3.35) i (3.36) są wyrażone za pomocą identycznej funkcji,
przy czym sygnał odpowiedzi (3.36) posiada przesunięcie 𝜏. Wobec tego zależność (3.38) można zapisać
w sposób:
𝐺(𝑠) =
𝐴
𝑦
𝐴
𝑥
𝐿 [sin 𝜔𝑡]
𝐿 [sin 𝜔𝑡]
𝑒̅
𝜑
𝜔
𝑠
(3.39)
Ponieważ 𝑠 = 𝑗𝜔, to transmitancja operatorowa 𝐺(𝑠) w postaci transmitancji widmowej 𝐺(𝑗𝜔) jest
równa:
𝐺(𝑠)
| 𝑠 = 𝑗𝜔 = 𝐺(𝑗𝜔),
(3.40)
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
19
i wówczas zależność (3.39), po uproszczeniach, przyjmuje postać:
𝐺(𝑗𝜔) =
𝐴
𝑦
𝐴
𝑥
𝑒̅
𝑗𝜑
.
(3.41)
Otrzymana postać transmitancji widmowej 𝐺(𝑗𝜔), dla określonej częstości 𝜔 = 𝜔
𝑖
, jest
postacią wykładniczą liczby zespolonej 𝐴, która dla 𝜔 = −𝜔
𝑖
posiada również liczbę zespoloną
sprzężoną 𝐴′ (rys.3.7 (a)).
a)
b)
A
A’
Re
I
m
0
=
i
I
m
R
e
P( )
i
Q( )
i
=
i
=0
Rys.3.7. Interpretacja graficzna: a) zależność (3.39) dla 𝜔 = 𝜔
𝑖
, b) zależność (3.39) dla 𝜔 = 0 ÷ +∞,
linią przerywaną zaznaczono 𝐺(𝑗𝜔) dla 𝜔 = 0 ÷ −∞.
Oznacza to, że zależność (3.41), dla 𝜔 = 0 ÷ +∞, będzie zbiorem punktów na płaszczyźnie
zespolonej (rys.3.7 (b)), tworzących krzywą ciągłą.
Stosunek amplitud
𝐴
𝑦
(𝜔)
𝐴
𝑥
(𝜔)
jest modułem transmitancji widmowej (3.41), co można zapisać
również w sposób:
|𝐺(𝑗𝜔)| =
𝐴
𝑦
(𝜔)
𝐴
𝑥
(𝜔)
= √𝑃(𝜔)
2
+ 𝑄(𝜔)
2
= 𝑀(𝜔) ,
(3.42)
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
20
gdzie:
𝑃(𝜔) - część rzeczywista transmitancji widmowej,
𝑄(𝜔) - część urojona transmitancji widmowej.
Argument 𝜑(𝜔) (przesunięcie fazowe) wynosi:
𝜑 = 𝑎𝑟𝑐 𝑡𝑔
𝑄(𝜔)
𝑃(𝜔)
.
(3.43)
Przedstawiona na rys.3.7 (b) forma graficzna transmitancji widmowej jest charakterystyką
częstotliwościową układu, równoważnią formie graficznej przedstawionej na rys.3.6.
Należy jeszcze wykazać, czy prawdziwe jest wyrażenie (3.36). Dla wejścia sinusoidalnego o
postaci (3.35) transformata ma postać:
𝑥(𝑡) = 𝐴
𝑥
𝑠𝑖𝑛 𝜔𝑡
𝑋(𝑠) = 𝐿 [𝑥(𝑡)] =
𝐴
𝑥
𝜔
𝑠
2
+ 𝜔
2
.
(3.44)
Z definicji transmitancji operatorowej wynika:
𝑌(𝑠) = 𝑋(𝑠) ∙ 𝐺(𝑠) =
𝐿 (𝑠)
𝑀 (𝑠)
∙
𝐴
𝑥
𝜔
𝑠
2
+ 𝜔
2
.
(3.45)
Dla pierwiastków 𝑠
1
, 𝑠
2
, … , 𝑠
𝑛
równania charakterystycznego 𝑀(𝑠) = 0, zależność (3.45) można
przedstawić w sposób:
𝑌(𝑠) =
𝐴
0
𝑠−𝑗𝜔
+
𝐴
0
∗
𝑠+𝑗𝜔
+
𝐴
1
𝑠−𝑠
1
+
𝐴
2
𝑠−𝑠
2
+ ⋯ ,
(3.46)
gdzie:
𝐴
0
i 𝐴
0
∗
- liczby zespolone sprzężone,
𝐴
1
, 𝐴
2
, … , - współczynniki rozkładu 𝐺(𝑠) na ułamki proste.
Podstawiając 𝑠 = 𝑗𝜔 obliczy się 𝐴
0
i 𝐴
0
∗
w sposób:
𝐴
𝑜
= [
𝐺 (𝑠)𝐴
𝑥
𝜔
𝑠+𝑗𝜔
]
𝑠 = 𝑗𝜔 =
𝐺 (𝑗𝜔)𝐴
𝑥
𝜔
2 𝑗𝜔
=
𝐴
𝑥
𝐺 (𝑗𝜔)
2𝑗
,
(3.47a)
𝐴
0
∗
=
𝐴
𝑥
𝐺 (−𝑗𝜔)
−1𝑗
.
(3.47b)
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
21
Dla otrzymania sinusoidalnie ustalonego stanu układu stabilnego, należy poddać odwrotnemu
przekształceniu Laplace’a tylko dwa pierwsze wyrazy po prawej stronie równania (3.45). Pozostałe
wyrazy równania (3.46) reprezentują w dziedzinie czasu stan przejściowy (nieustalony). Otrzyma się:
𝑦(𝑡)
𝑠𝑡
= 𝐿
−1
[
𝐴
0
𝑠−𝑗𝜔
+
𝐴
0
∗
𝑠+𝑗𝜔
] .
(3.48)
Po podstawieniu zależności (3.47) i dokonaniu odwrotnego przekształcenia Laplace’a, uzyska
się wynik:
𝑦(𝑡)
𝑢𝑠𝑡
= 𝐴
𝑥
[
𝐺 (𝑗𝜔)
2𝑗
𝑒
𝑗𝜔𝑡
−
𝐺 (−𝑗𝜔)
2𝑗
𝑒̅
𝑗𝜔𝑡
] .
(3.49)
Ponieważ transmitancja widmowa 𝐺(𝑗𝜔) jest ogólnie liczbą zespoloną (patrz zależność (3.41) o
modelu (8) i fazie (9), co można dla 𝐺(𝑗𝜔) i 𝐺(−𝑗𝜔) zapisać jako:
𝐺(𝑗𝜔) = 𝑀(𝜔) 𝑒
+𝑗𝜑(𝜔)
,
(3.50a)
𝐺(−𝑗𝜔) = 𝑀(𝜔) 𝑒
−𝑗𝜑(𝜔)
.
(3.50b)
Po podstawieniu (3.50a) i (3.50b) do wyrażenia (3.49) uzyskuje się:
𝑦(𝑡)
𝑠𝑡
= 𝐴
𝑥
𝑀(𝜔)[
𝑒
+𝑗
[𝜔𝑡+𝜑 (𝜔)]−𝑒
−𝑗 [𝜔𝑡 + 𝜑 (𝜔)]
2𝑗
]
.
(3.51)
Wykorzystując w zależności (3.51) wzór Eulera o postaci:
sin 𝛼 =
𝑒
+𝑗𝛼
−𝑒
−𝑗𝛼
2𝑗
,
(3.52)
otrzyma się:
𝑦(𝑡)
𝑠𝑡
= 𝐴
𝑥
𝑀(𝜔) 𝑠𝑖𝑛 [𝜔𝑡 + 𝜑(𝜔)]
Z porównania zależności (3.51) z zależnością (3.52) wynika, że
𝑦(𝑡)
𝑠𝑡
= 𝐴
𝑦
sin [𝜔𝑡 + 𝜑 (𝜔)] ,
(3.53)
gdzie:
𝐴
𝑦
= 𝐴
𝑥
𝑀(𝜔) .

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
22
Liczba 𝑀(𝜔) =
𝐴
𝑦
(𝜔)
𝐴
𝑥
(𝜔)
jest stosunkiem modułów, nazywanym wzmocnieniem układu i jest
funkcją częstotliwości 𝜔. Nazywana też jest charakterystyką częstotliwościową amplitudową lub
charakterystyką modułu – rys.3.6 (a).
Z rys.3.5 wynika, że ujemna wartość 𝜑 (𝜔) oznacza opóźnienie się wyjścia za wejściem.
Przesunięcie fazowe 𝜑 (𝜔) jest funkcją częstotliwości. Jeżeli 𝑚 i 𝑛 są stopniami wielomianów
odpowiednio licznika 𝐿(𝑠) i mianownika 𝑀(𝑠) transmitancji operatorowej układu 𝐺(𝑠), wówczas dla
𝜔 → ∞ przesunięcie fazowe 𝜑(𝜔) wynosi:
𝜑(𝜔) →
𝑛−𝑚
𝜋/2
,
(3.54)
dla 𝜔 → ∞ .
Podana zależność dotyczy tzw. układów minimalnofazowych, tj. takich które nie zawierają
elementów z tzw. czystym opóźnieniem typu 𝑒̅
𝜏𝑠
lub zer i biegunów dodatnich.
Zależność 𝜑(𝜔), wykreślona w funkcji częstotliwości, nazywa się charakterystyką
częstotliwościową fazową (rys.3.6 (b)).
Postać charakterystyki częstotliwościowej amplitudowo-fazowej (rys.3.7 (b)) przedstawiona na
płaszczyźnie zmiennej zespolonej (nazywanej też płaszczyzną 𝐺(𝑗𝜔) , mającej osie rzeczywistą i
urojoną, nazywa się wykresem Nyquista.
W praktyce najczęściej korzysta się z charakterystyki częstotliwościowej, która tak jak rys.3.6,
przedstawia oddzielnie przebieg modułu i przebieg fazy, ale wyrażonej w skali logarytmicznej (rys.3.8),
przy czym moduł 𝑀(𝜔) przedstawia się w sposób:
𝐿(𝜔) = 20 log 𝑀(𝜔) [𝑑𝐵] .
(3.55)
Wartość logarytmu modułów 𝐿(𝜔) wyraża się w decybelach [dB]. Oś rzędnych log 𝜔 wyrażona
jest w dekadach a oś odciętych w poziomach co 20dB. Przebiegi charakterystyk przedstawia się w
sposób uproszczony, za pomocą odcinków linii prostych (asymptot), zaznaczając częstość załamania
(tzw. częstość sprzęgającą).
𝜔
𝑖
=
1
𝜏
𝑖
,
𝐿(𝜔
𝑖
) = 0 ,
}
(3.56)
występującą dla 𝐿 (𝜔
𝑖
) = 0. Nachylenie asymptot, wynoszące, np. −20𝑑𝐵/𝑑𝑒𝑘, oznacza się
współczynnikiem kierunkowym −1, 𝑑𝑙𝑎 + 20𝑑𝑏/𝑑𝑒𝑘 będzie to +1.
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
23
Taka postać charakterystyki częstotliwościowej nazywana jest wykresem Bodego.
Charakterystyki częstotliwościowe są sporządzone także dla układów nieliniowych. Należy
wówczas przestrzegać, by amplituda wymuszenia 𝐴𝑥 miała wartość stałą dla wszystkich częstotliwości
𝜔. Inna wartość 𝐴𝑥 odpowiada innej charakterystyce elementu nieliniowego ponieważ
𝐴𝑥
1
(𝜔
1
)
𝐴𝑦
1
(𝜔
1
)
±
𝐴𝑦
2
(𝜔
2
)
𝐴𝑥
2
(𝜔
2
)
.
Charakterystyki częstotliwościowe elementarnych procesów (podstawowych elementów)
Korzystając z zależności (3.40), (3.42) i (3.43), można wyznaczyć charakterystyki
częstotliwościowe dla elementarnych procesów na podstawie ich transmisji operatorowej.
Dla właściwości proporcjonalnych transmitancja operatorowa wynosi:
𝐺(𝑠) = 𝑘 .
(3.57)
Z zależności (3.40) wynika:
𝐺(𝑗𝜔) = 𝐺(𝑠) |
𝑠 = 𝑗𝜔
= 𝑘 = 𝑃(𝜔) + 𝑗𝑄(𝜔) .
(3.58)
Oznacza to, że
𝑃 (𝜔) = 𝑘 ,
𝑄 (𝜔) = 0 .
Stąd wynika:
|𝐺 (𝑗𝜔)| = 𝑀 (𝜔) = 𝑘 ,
𝜑 (𝜔) = 0 ,
𝐿 (𝐽𝜔) = 20 log 𝑘 .
}
(3.59)
Przebieg modułu procesu o właściwościach proporcjonalnych jest stały, nie zależny od częstości
𝜔 i jest to prosta równoległa do osi 𝑙𝑜𝑔 𝜔 w odległości od tej osi 20 𝑙𝑜𝑔 𝑘. Przesunięcie fazowe wynosi
zero.
Właściwości inercyjne pierwszego rzędu opisuje transmitancja operatorowa
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
24
𝐺(𝑠) =
1
𝑇𝑠+1
.
(3.60)
Postępując jak poprzednio otrzyma się:
𝐺(𝑗𝜔) = 𝐺(𝑠)|𝑠 = 𝑗𝜔 =
1
1+𝑗𝜔𝑇
∙
1−𝑗𝜔𝑇
1−𝑗𝜔𝑇
=
1
1 + 𝜔
2
𝑇
2
− 𝑗
𝜔𝑇
1 + 𝜔
2
𝑇
2
,
(3.61)
𝑃(𝜔) =
1
1 + 𝜔
2
𝑇
2
,
𝑄(𝜔) =
−𝜔𝑇
1 + 𝜔
2
𝑇
2
,
|𝐺(𝑗𝜔)| = 𝑀(𝜔) =
1
√1 + 𝑇
2
𝜔
2
,
𝜑(𝜔) = 𝑎𝑟𝑐 𝑡𝑔 = −𝜔𝑇,
ℒ(𝜔) = 20 log (
1
√1 + 𝑇
2
𝜔
2
) = 20 log √1 + 𝑇
2
𝜔
2
.}
(3.62)
L( )
log
log
0
0,01
0,001
0,1
0,1
0,01
0,001
1
1
10
10
100
100
-20
+20
+40
+60
+80
[dB]
Rys.3.8. Współrzędne charakterystyki częstotliwościowej wyrażone w skali logarytmicznej
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
25
W podobny sposób wyznacza się charakterystyki częstotliwościowe dla pozostałych elementów
podstawowych. W tablicy 3.2 zostały przedstawione charakterystyki częstotliwościowe, w formie
wykresów Nyquista i Bodego, dla elementów podstawowych oraz innych występujących w wyniku
przekształceń elementów.
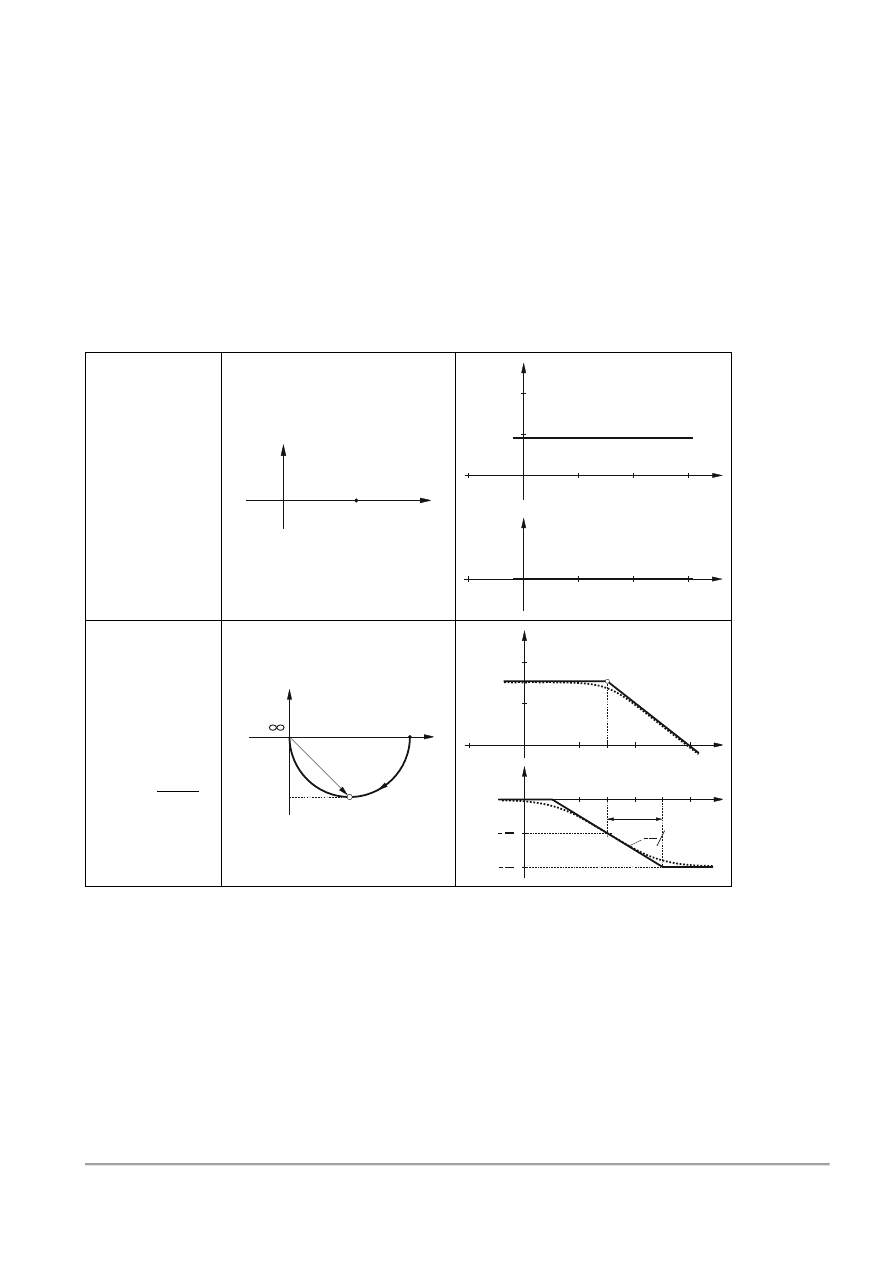
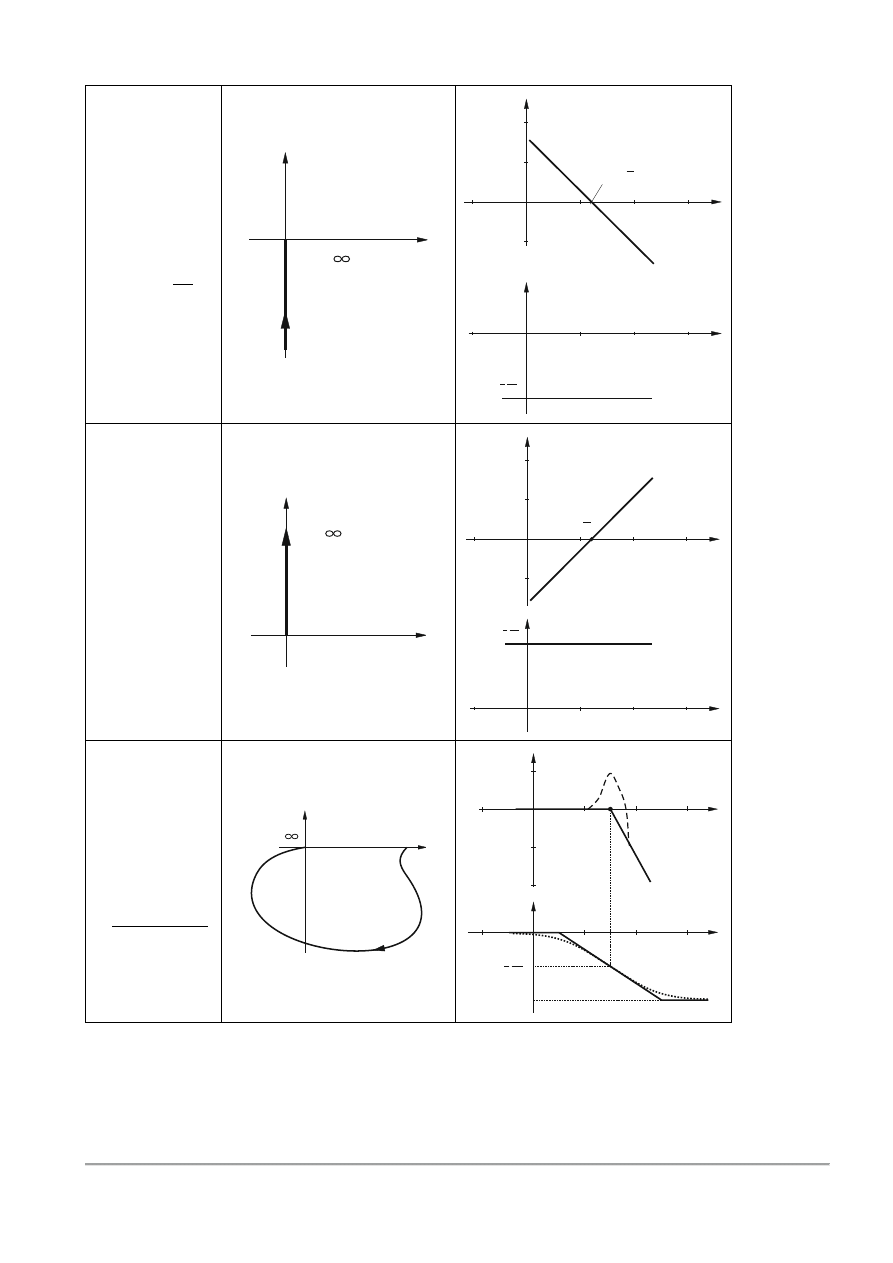
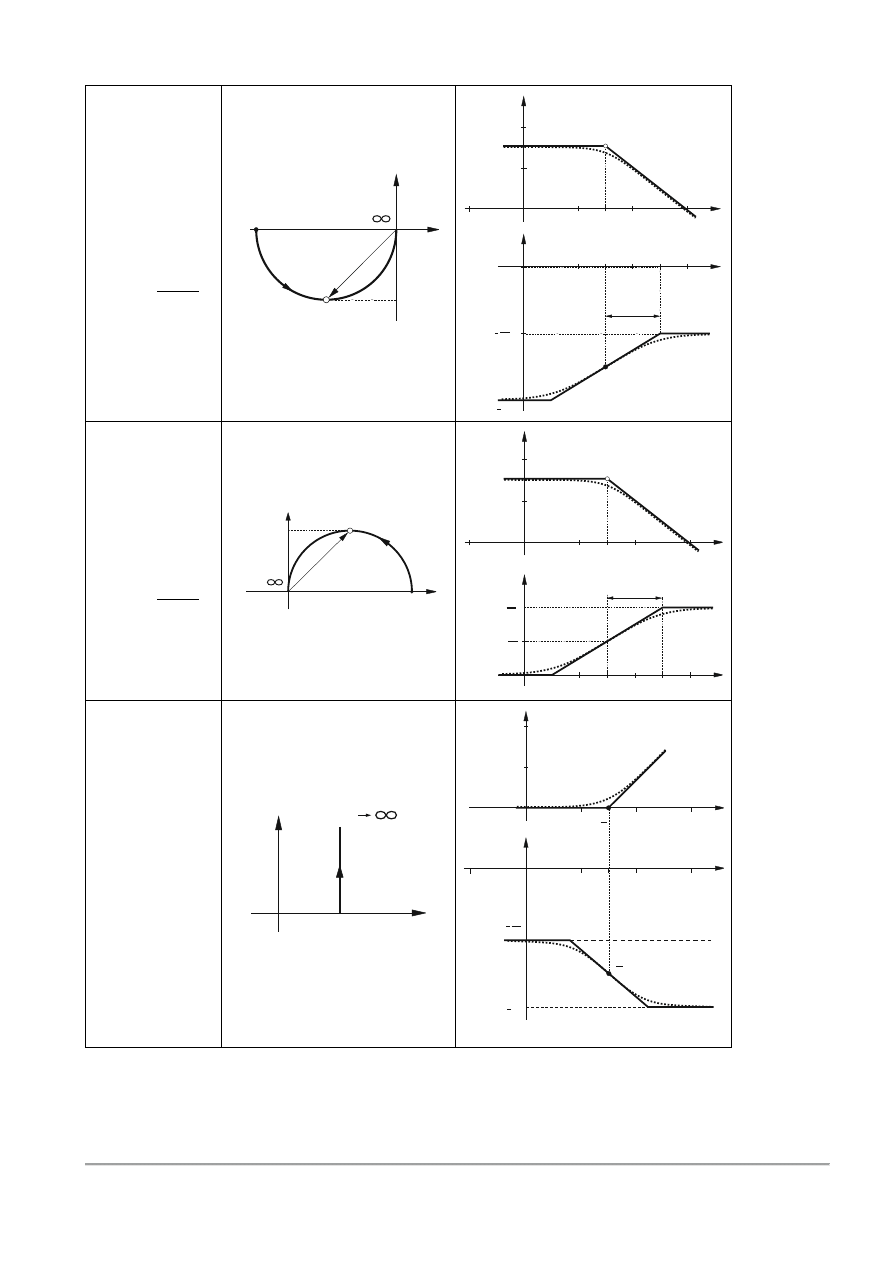
Tablica 3.2. Charakterystyki częstotliwościowe najczęściej występujących elementarnych procesów
1
Element
bezinercyjny
𝐺(𝑠) = 𝑘
k
0
I
m
R
e
log
log
L( )
[dB]
20logk
0
10
10
0,1
100
100
0
20
40
1
0,1
1
-1
-1
2
Element inercyjny
1 rzędu
𝐺(𝑠) =
1
𝑇𝑠 + 1
s
=1/T
R e
1
I m
[dB]
20log k
-20dB/dek
-1
20
0
0
( )
0,1
1
-1
1
1 dekada
s
=1/T
s
=1/T
s
=1/T
10
10
100
log
log
100
40
L( )
4
dek
4
2
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
26
3
Element całkujący
𝐺(𝑠) =
1
𝑇𝑠
R
e
I
m
0
0
20
-20
40
L( )
[dB]
0,1
0,1
10
10
100
100
1
1
0
0
log
log
-1
1
T
-1
-1
2
4
Układ
różniczkujący
𝐺(𝑠) = 𝑇𝑠
I m
R
e
0
0
20
-20
40
L( )
[dB]
0,1
0,1
10
10
100
100
1
1
0
0
log
log
+1
s
1
T
-1
-1
2
5
Element
oscylacyjny
𝐺(𝑠)
=
1
𝑇
2
𝑠
2
+ 2𝜁𝑇𝑠 + 1
0
R e
1
I m
2
-
-2
[dB]
-20
20
0
0
0,1
0,1
1
1
-1
-1
s
=1/T
s
=1/T
10
10
100
100
log
log
-40
L( )
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
27
6
Element inercyjny
niestabilny
𝐺(𝑠) =
1
𝑇𝑠 − 1
s
=1/T
R e
- 1
I m
[dB]
20log k
-20dB/dek
-1
20
0
0
( )
0,1
1
-1
1
1 dekada
s
=1/T
s
=1/T
10
10
100
log
log
100
40
L( )
2
s
1/T
s
1/T
7
Element inercyjny
niestabilny
𝐺(𝑠) =
1
1 − 𝑇𝑠
R e
1
I m
20log k
-20dB/dek
-1
20
0
0
( )
0,1
1
-1
1
1 dekada
s
=1/T
s
=1/T
10
10
100
log
log
100
40
4
2
8
Element
różniczkujący z
inercją
𝑇𝑠 + 1
1
0
I
m
R
e
log
log
L( )
[dB]
1
1
T
T
0
0
0,1
-1
-1
+1
0,1
10
10
100
100
1
1
20
40
2
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
28
9
Element
różniczkujący z
inercją
𝑇𝑠 − 1
-1
0
I
m
R
e
2
log
log
L( )
[dB]
1
T
1
T
1
T
0
0
0,1
-1
-1
+1
0,1
10
10
100
100
1
1
20
40
10
Element
różniczkujący
𝐺(𝑠) = 1 − 𝑇𝑠
R e
1
I m
0
[dB]
20
40
0
0
-1
-1
1
1
0,1
0,1
s
=1/T
s
=1/T
10
10
log
log
100
100
L( )
+1
4
2
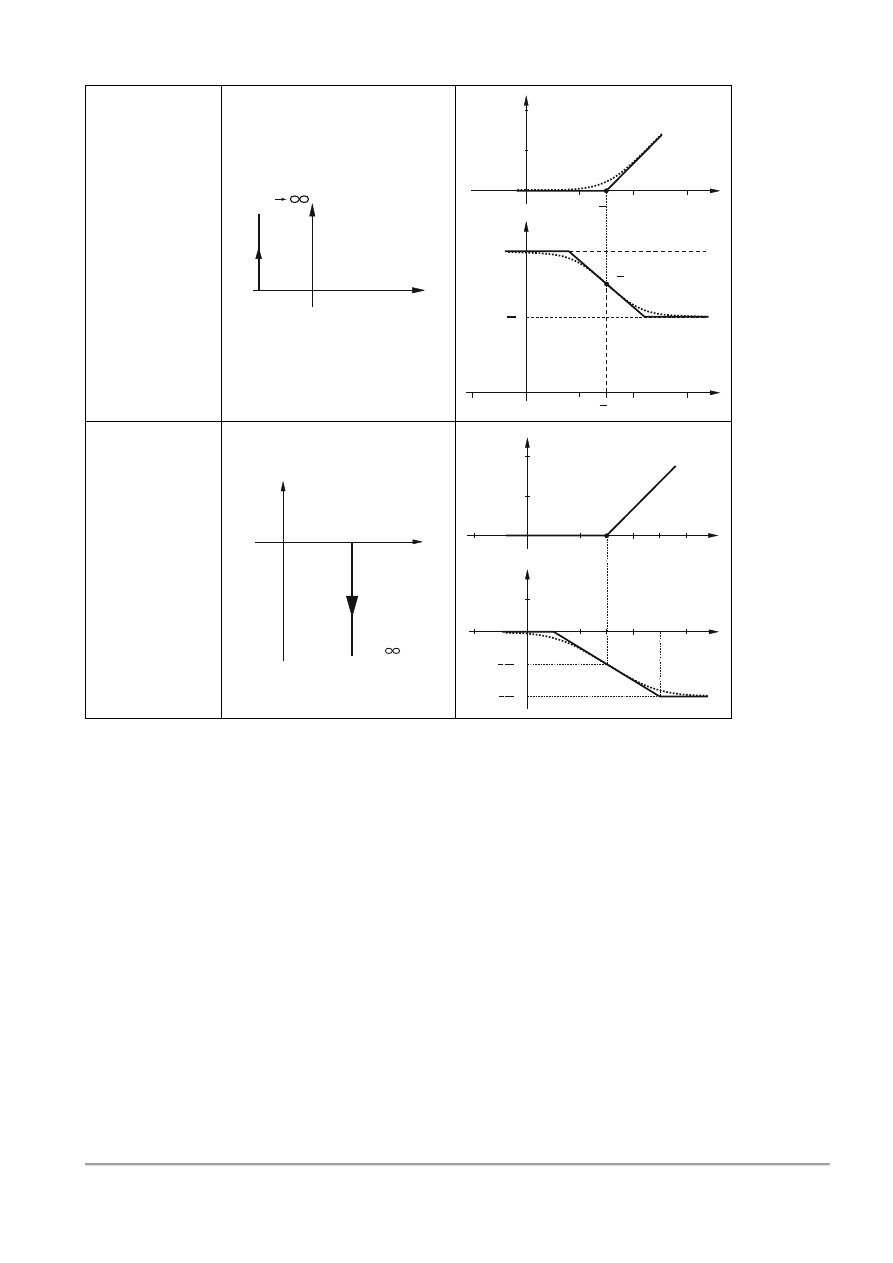
W tablicy 3.2 nie została przedstawiona charakterystyka częstotliwościowa właściwości
opóźniających.
𝐺(𝑠) = 𝑒̅
𝜏𝑠
.
(3.63)
W przypadku właściwości opóźnionych występuje tylko przesunięcie fazowe, bez
zniekształcenia kształtu sygnału. Moduł i faza mają postać:
|𝐺(𝑗𝜔)| = 1, 𝜑 (𝜔) = arg 𝐺 (𝑗𝜔) = −𝜏𝜔 [𝑟𝑎𝑑] = −57,3 𝜏𝜔 [𝑠𝑡𝑜𝑝𝑛𝑖] .
(3.64)
Przedstawione w tablicy 3.2, najczęściej występujące elementy procesów, można zapisać w postaci
podanych niżej czynników lub ich kombinacji w sposób:
𝑘 /𝑠
𝑁
, (1 + 𝑇𝑠)
±1
, (1 + 2𝜉𝑇𝑠 + 𝑠
2
)
±1
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
29
lub
(3.65)
𝑘 /𝑗𝜔
𝑁
, (1 + 𝑗𝜔𝑇)
±1
, [1 + 𝑗2𝜉𝜔 + (𝑗𝜔)
2
]
±1
.
W celu uniwersalnego przedstawienia charakterystyk częstotliwościowych, dla dowolnych
stałych czasowych 𝑇, można wprowadzić znormalizowaną częstotliwość 𝛺 w sposób:
𝛺 = 𝜔𝑇 .
(3.66)
Wówczas właściwości inercyjne (1 + 𝑇𝑠)
−1
i oscylacyjne (1 + 2𝜉𝑇𝑠 + 𝑇
2
𝑠
2
)
−1
i ich
odwrotności przyjmą postacie:
(1 + 𝑗Ω)
±1
, [1 + 2𝜉(𝑗Ω) + (𝑗Ω)
2
]
±1
.
(3.67)
Dla zależności 𝑘/𝑠
𝑁
, charakterystyki częstotliwościowe wynoszą:
|
𝑘
(𝑗𝜔)
𝑁
| =
𝑘
𝜔
𝑁
, 𝜑(𝜔) = arg
𝑘
(𝑗𝜔)
𝑁
= −
𝜋
2
𝑁.
(3.68)
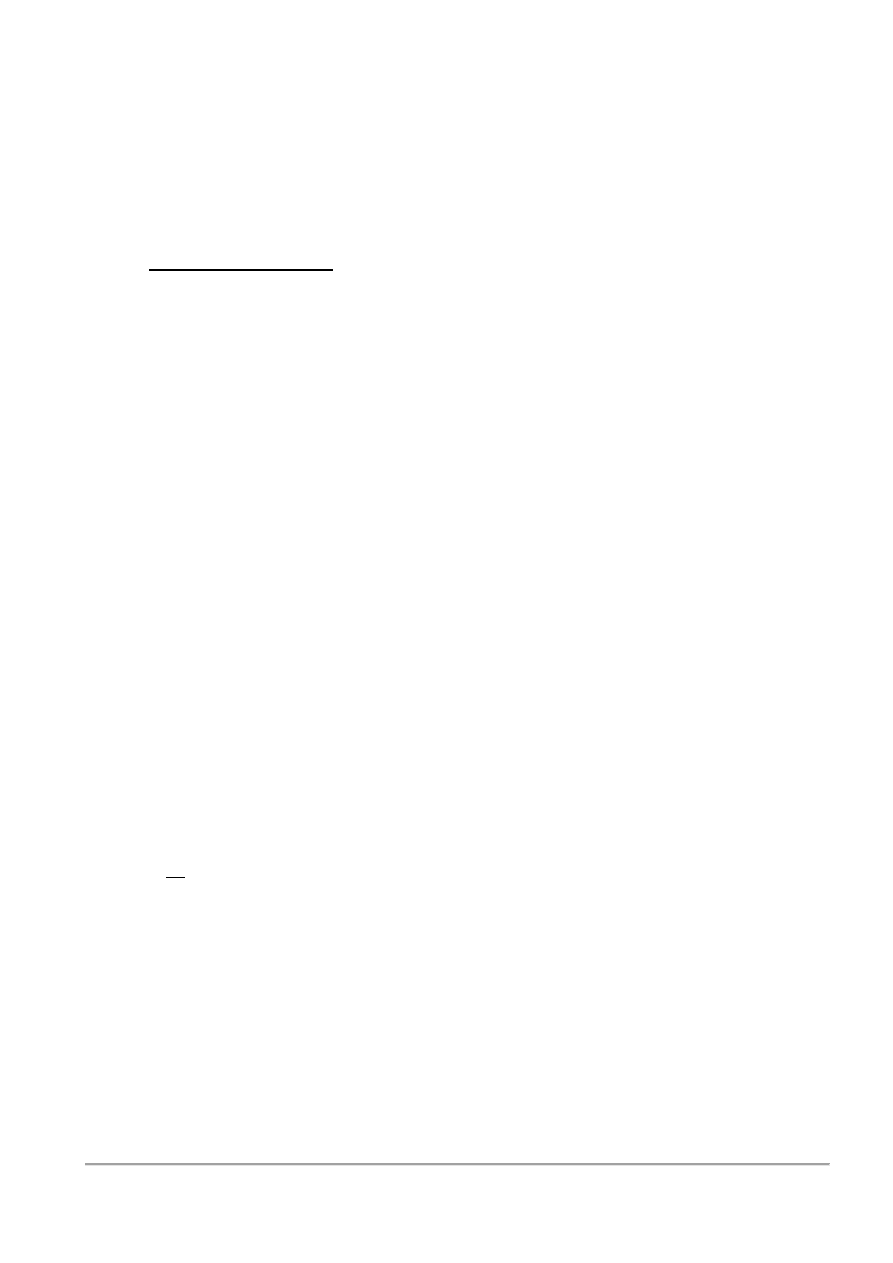
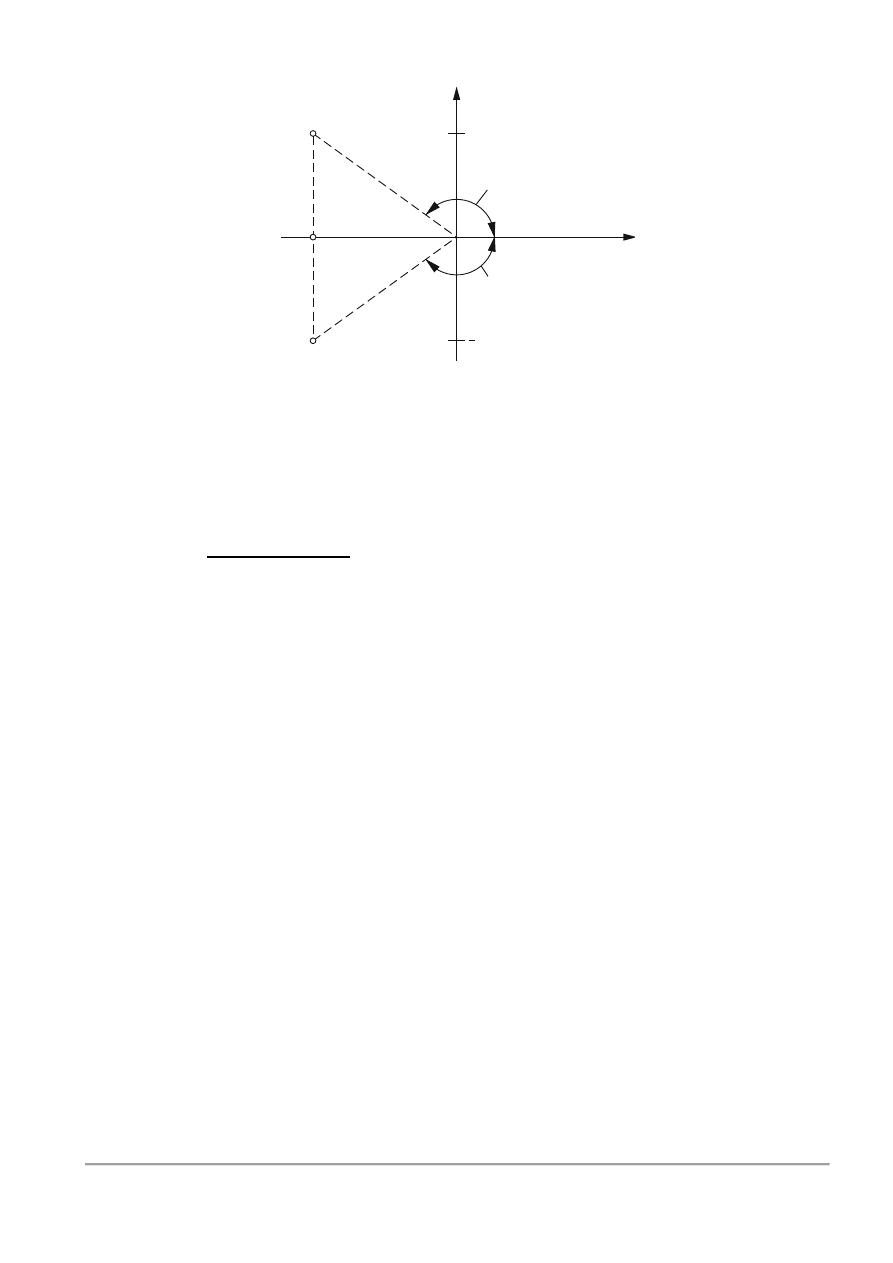
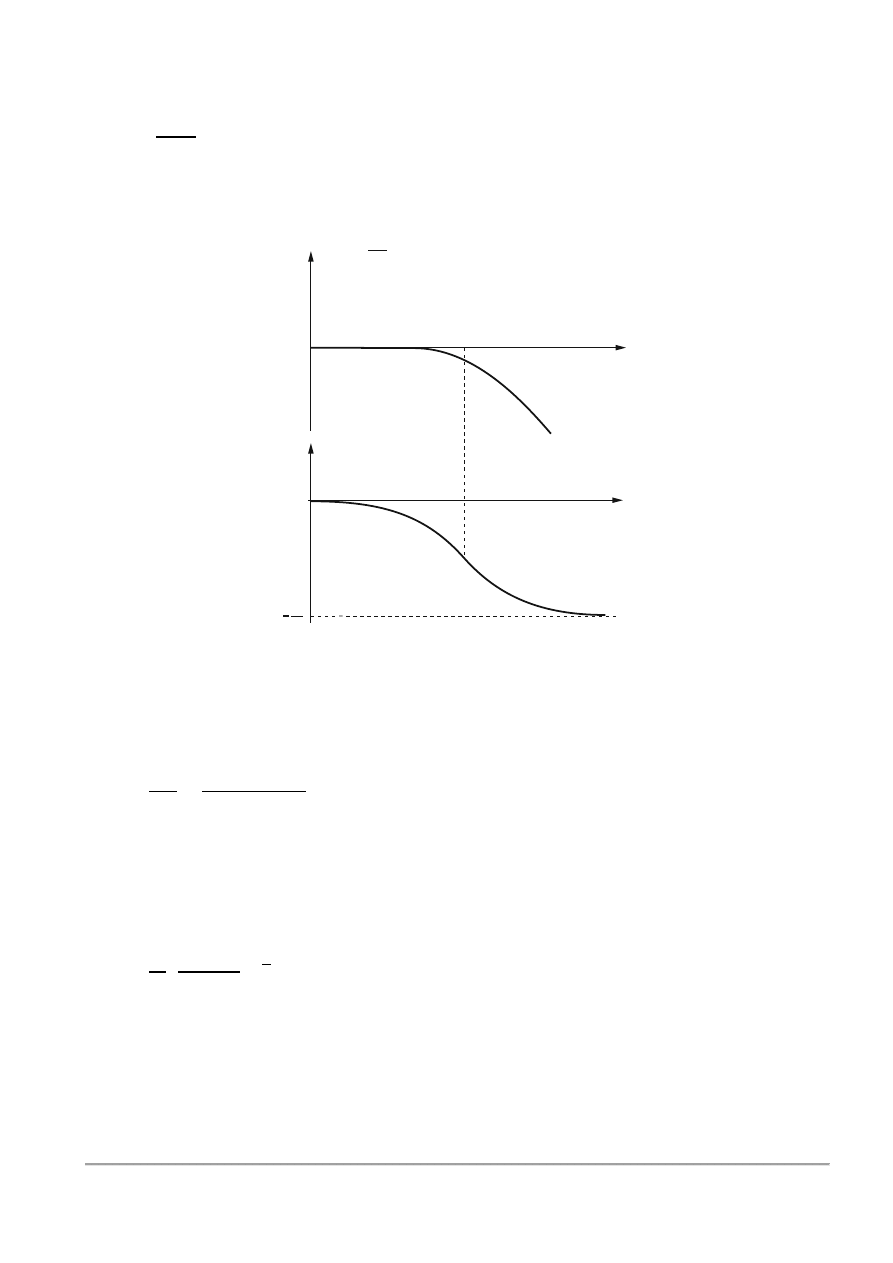
Z tego wynika, że przesunięcie fazowe 𝜑(𝜔) ma stałą wartość a przebieg modułu 𝐿(𝜔) jest
prostą stałego nachylenia −20𝑁[𝑑𝐵/𝑑𝑒𝑘] i przecina oś odciętych dla częstotliwości 𝜔 = (𝑘)
1/𝑁
. Na
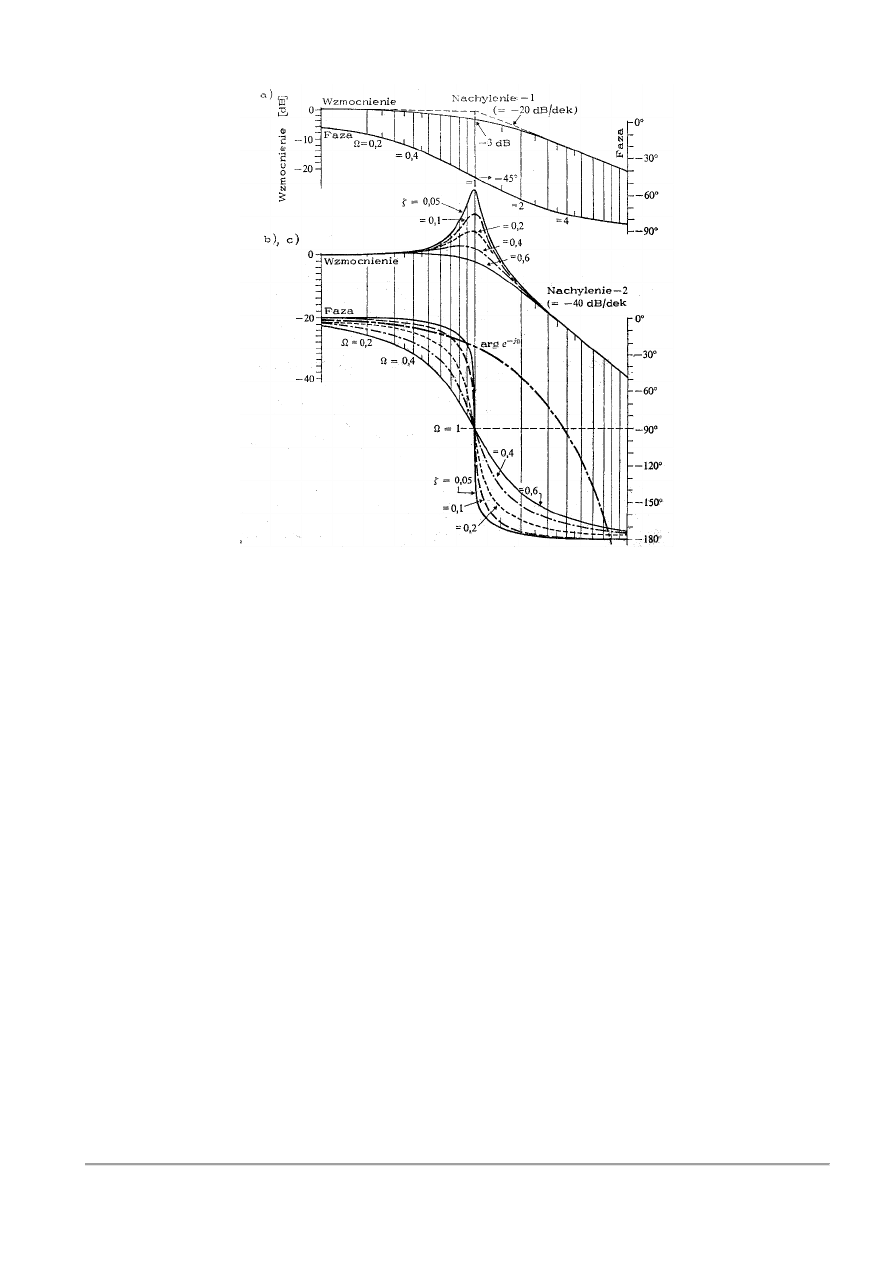
rys.3.2 przedstawione zostały wykresy Bodego w funkcji częstotliwości bezwymiarowych 𝛺 dla
właściwości: inercyjnych pierwszego rzędu, oscylacyjnych oraz opóźniających, przedstawionych za
pomocą zależności (3.67); 𝑁 = − 1. Częstości sprzęgające 𝛺
𝑠
, nazywane też częstotliwościami
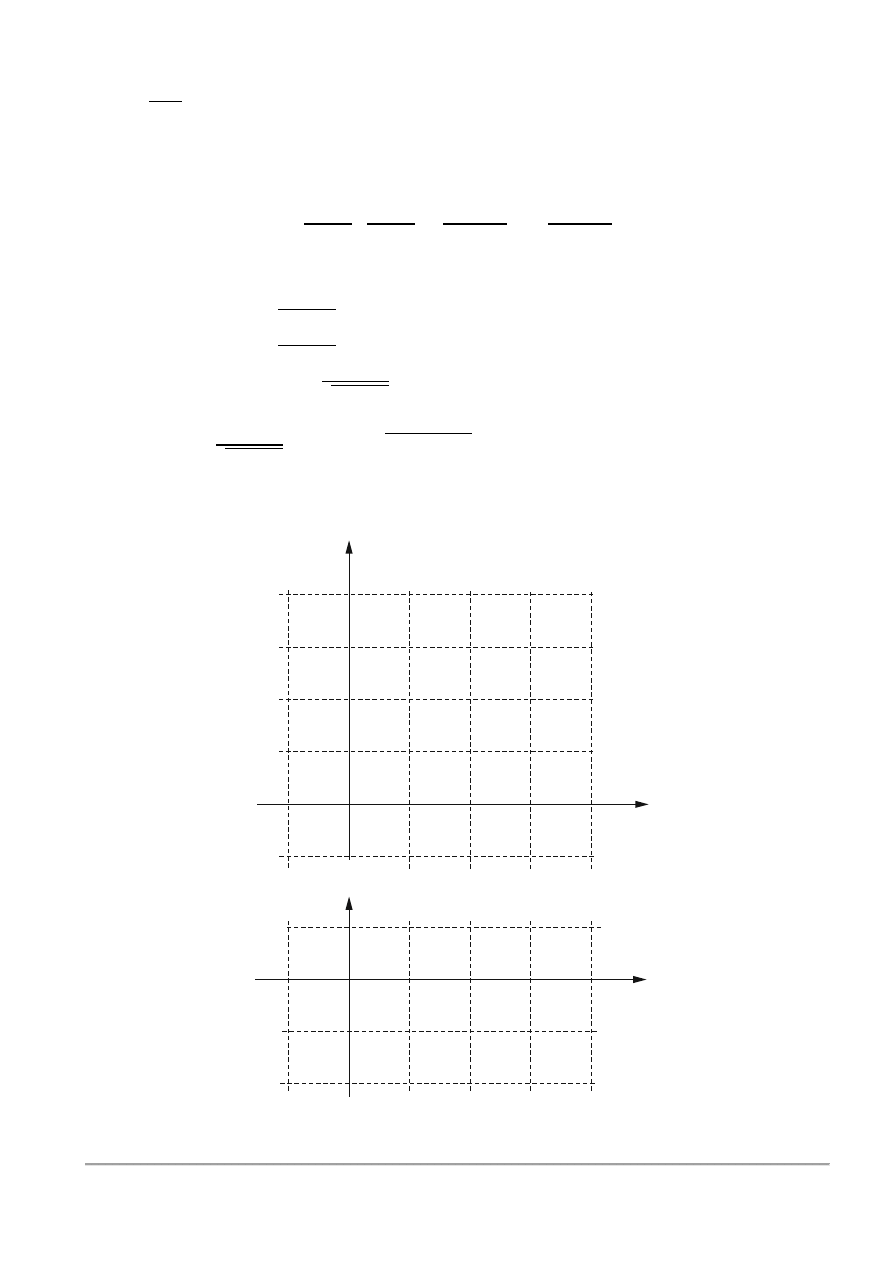
załamania, dla przebiegu (a) i (b) wynoszą 1.
S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
30
Rys.3.9. Charakterystyki częstotliwościowe (wykresy Bodego) w funkcji bezwymiarowej dla
właściwości: a) inercyjnych pierwszego rzędu, b) oscylacyjnych, c) opóźniających
Charakterystyki dla wykładnika 𝑁 = +1 będą odbiciem lustrzanym charakterystyk pokazanych
na rys.3.9. Charakterystyki częstotliwościowe o postaciach przedstawionych na rys.3.9, nazywane są
szablonami Bodego, ponieważ umożliwiają wykreślenie charakterystyk częstotliwościowych układów o
transmitancji ogólnej przedstawionej w postaci czynnikowej, złożonej z czynników (3.65).
Charakterystyki częstotliwościowe układu złożonego
Przez "układ złożony" rozumie się układ, na który składa się kilka połączonych szeregowo
elementów podstawowych. W przypadku układu sterowania ze sprzężeniem zwrotnym, rozpatruje się
charakterystykę częstotliwościową układu otwartego 𝐺
𝑈0
(𝑠), która jest połączeniem szeregowym
następujących elementów funkcjonalnych: regulatora 𝐺
𝑅
(𝑠), urządzenia wykonawczego (nastawnika)
𝐺
𝑊
(𝑠), sterowanego procesu 𝐺
𝑃
(𝑠) i przetwornika pomiarowego 𝐺
𝑃𝑃
(𝑠):
𝐺
𝑈0
(𝑠) = 𝐺
𝑅
(𝑠) ∙ 𝐺
𝑊
(𝑠) ∙ 𝐺
𝑝
(𝑠) ∙ 𝐺
𝑝𝑝
(𝑠) .
(3.69)

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
31
Po podstawieniu do zależności (3.69) poszczególnych właściwości, należy dokonać ewentualnie
dalszego ich rozpisania i uporządkowania na elementarne procesy (3.65) + (tablica 3.2). W wyniku
uzyska się transmitancję operatorową, którą ogólnie można zapisać w postaci czynnikowej jako iloczyn
elementarnych procesów w sposób:
𝐺
𝑈0
(𝑠) =
𝑘
𝑠
𝑁
Π (1 + 𝑇
𝑖
𝑠) Π [1 + 2𝜉
𝑗
𝑇
𝑗
𝑠 + (𝑇
𝑗
𝑠)]
Π (1 + 𝑇
𝑘
𝑠) Π [1 + 2𝜉
𝑙
𝑇
𝑙
𝑠 + (𝑇
𝑙
𝑠)]
.
(3.70)
W transmitancji (3.70) nie został uwzględniony element opóźniający, który też może w układzie
występować. Zależność (3.70) można również zapisać ogólnie w sposób:
𝐺(𝑠) = 𝐺
1
(𝑠) ∙ 𝐺
2
(𝑠) ∙ 𝐺
3
(𝑠) ∙ ⋯ 𝐺
𝑛
(𝑠)
(3.71)
Transmitancja widmowa dla ogólnej postaci czynnikowej (3.71), z uwzględnieniem właściwości
poszczególnych procesów zapisanych w formach elementarnych, przedstawia się następująco:
𝐺(𝑗𝜔) = 𝐺(𝑠)|
𝑠=𝑗𝜔
= 𝑀
1
(𝜔)𝑒
−𝑗𝜑
1
(𝜔)
∙ 𝑀
2
(𝜔)𝑒
−𝑗𝜑
2
(𝜔)
∙ 𝑀
3
(𝜔)𝑒
−𝑗𝜑
3
(𝜔)
∙ ⋯ 𝑀
𝑛
(𝜔)𝑒
−𝑗𝜑
𝑛
(𝜔)
(3.72)
lub
𝐺(𝑗𝜔) = 𝑀(𝜔) 𝑒
−𝑗𝜑(𝜔)
gdzie:
𝑀(𝜔) = ∏
𝑀
𝑖
(𝜔)
𝑛
𝑖=1
, 𝑚oduł układu ,
𝜑(𝜔) = ∑
𝜑
𝑖
(𝜔), faza układu
𝑛
𝑖=1
.
}
(3.73)
Ponieważ moduł 𝑀(𝜔) układu złożonego z kilku połączonych szeregowo transmitancji
operatorowych jest równy iloczynowi poszczególnych modułów, to przedstawiając charakterystyki
poszczególnych elementów we współrzędnych logarytmicznych, po ich graficznym zsumowaniu,
otrzyma się przebieg modułu wypadkowego układu. Z podanego powodu stosuje się do sporządzenia
charakterystyki
amplitudowej
(modułu)
i
fazowej
współrzędne
przedstawione
na
rys. 3.3:

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
32
a) dla modułu 𝑙𝑜𝑔𝜔 i 𝐿(𝜔),
b) dla fazy 𝑙𝑜𝑔𝜑 i 𝜑(𝜔),
(3.74)
gdzie:
𝐿(𝜔) = 20 𝑙𝑜𝑔𝑀(𝜔) = 20 𝑙𝑜𝑔𝑀
1
(𝜔) + 20 𝑙𝑜𝑔𝑀
2
(𝜔) + 20 𝑙𝑜𝑔𝑀
3
(𝜔) + ⋯ 20 𝑙𝑜𝑔𝑀
𝑛1
(𝜔)
Podsumowanie:
Charakterystykę częstotliwościową, na którą składa się z przebiegu modułu (charakterystyka
amplitudowa) i przebiegu argumentu (charakterystyka fazowa), można sporządzić w następujące
sposoby:
a) Po zapisie transmitancji operatorowej układu w postaci iloczynu czynników (3.69), należy na
współrzędnych 𝐿(𝜔) i 𝑙𝑜𝑔 𝜔 oraz 𝜑(𝜔) i 𝑙𝑜𝑔 𝜔 wykreślić przebiegi asymptotyczne modułów i
argumentów poszczególnych czynników (tablica 3.2) i zsumować je graficznie. Dla ustalenia
poszczególnych przebiegów na osi 𝑙𝑜𝑔𝜔, należy określić dla każdego elementu częstotliwość
sprzęgającą. Otrzymuje się w ten sposób uproszczoną charakterystykę (asymptotyczną), która może
być przydatna, np. do oceny stabilności układu, korekcji nastaw regulatora, oraz określenia pasma
przenoszenia.
b) Podobnie jak w (a) należy zapisać transmitancję operatorową układu w postaci czynnikowej (3.70) i
posłużyć się współrzędnymi 𝑙𝑜𝑔 𝛺(𝜔) − 𝑙𝑜𝑔 𝛺 (bezwymiarowymi). Dla poszczególnych przebiegów
na osie współrzędnych należy nanieść szablony pokazane na rys.3.9. Ustalenie położenia
charakterystyk poszczególnych elementów na osi 𝑙𝑜𝑔 𝛺, dokonuje się za pomocą częstotliwości
sprzęgających 𝛺
𝑠
. Podobnie ustala się położenia elementu 𝑘 𝜔
𝑁
⁄
. Następnie należy zsumować
graficznie charakterystyki poszczególnych elementów dla otrzymania przebiegów wypadkowych, ale
zaleca się wcześniejsze wykreślenie asymptot (tak jak w (a)) a dopiero naniesienie dokładnych
poprawek przebiegu w punktach załamania charakterystyki - w punktach wyznaczonych przez
częstotliwości sprzęgające 𝛺
𝑠
.
Charakterystyki przybliżone (asymptotyczne) są wystarczające tylko dla pierwszej fazy
projektowania układu. W fazie końcowej należy wykreślić charakterystyki dokładne i w tym celu można
posłużyć się opisem metody (b) lub stosownym programem komputerowym.

S.Płaska. Prawa autorskie zastrzeżone. Udostępnione studentom roku akademickiego 2015/2016
33
Szablony pokazane na rys.3.9 należy stosować bardzo ostrożnie i umiejętnie dla układów
minimalnofazowych.
Układy minimalnofazowe to takie, które zawierają tzw. czynniki modyfikujące, co w
transmitancji operatorowej (3.70) można stwierdzić przez wystąpienie znaku "-" przed 𝑇
𝑖
lub (2 𝜉
𝑗
𝑇
𝑗
).
Takie elementy przesuwają wyłącznie fazę od 0 - 180
0
wraz ze wzrostem częstotliwości 𝜔. Układy nie
minimalnofazowe zawierają bieguny dodatnie lub zera dodatnie i są niestabilne.
Opóźnienie fazy powoduje także element opóźniający:
𝐺(𝑠) = 𝑒
−𝜏𝑠
(3.75)
lub też transmitancje, które wynikają z rozwinięcia tego elementu w szereg Taylora:
𝐺(𝑠) =
1 − 0,5𝜏𝑠
1 + 0,5𝜏𝑠
𝐺(𝑠) =
(𝜏𝑠)
2
−6 (𝜏𝑠) + 12
(𝜏𝑠)
2
+ 6(𝜏𝑠) + 12
} .
(3.76)
Częstotliwość unormowana 𝛺 dla elementu opóźniającego (13) wynosi
𝛺 = 𝜏𝜔
(3.77)
Wyszukiwarka
Podobne podstrony:
CHARAKTERYSTYKA PROCESÓW EMOCJONALNYCH
charakterystyka procesów spalania
charakterystyka procesów spalania
Charakterystyka procesu i rodzaje spawania
Erich Fromm-Charakter a proces spo-eczny, Filologia polska, Antropologia kultury
Charakterystyka procesu dydaktyczno wychowawczego w klasach 1 3
Charakterystyka procesu krzepnięcia krwi, Szkoła, przydatne w szkole
Charakterystyka procesu i rodzaje spawania
4 CHARAKTERYSTYKA PROCESW KIEROWANIA, Kierowanie i dowodzenie w systemach bezpieczeństwa
OGÓLNA CHARAKTERYSTYKA PROCESÓW POZNAWCZYCH
PERSWAZJA CHARAKTERYSTYKA PROCESU (PERSUASION THE PROCESS CHARACTERISTCS)
Charakteryzowanie procesów poligraficznych i technik drukowania
Charakterystyka procesu transportowego
8a źródła inf i ich charakterystyka, Procesy informacyjne w zarządzaniu, materiały student Z-sem 12-
OGÓLNA CHARAKTERYSTYKA PROCESU SPALANIA, Straż pożarna
Charakterystyka procesu galwanicznego
CHARAKTERYSTYKA PROCESU PRACY, CHARAKTERYSTYKA PROCESU PRACY
więcej podobnych podstron