
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
WYKŁAD 1
Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
Spis treści
1. Czym jest komputerowa analiza systemów pomiarowych?
. . . . . . . . . . . . . . . . . . . .
2
2. Narzędzia analizy systemów pomiarowych
. . . . . . . . . . . . . . . . . . . . . . . . . .
3
3. Sygnały pomiarowe wykorzystywane w badaniach symulacyjnych
. . . . . . . . . . . . . . . . .
4
4. Dobór częstotliwości próbkowania generowanych sygnałów
. . . . . . . . . . . . . . . . . . . .
5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
Dariusz Borkowski, borkows@agh.edu.pl, http://bednar.prv.pl
Katedra Metrologii AGH, 19 lutego 2008

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
1. CZYM JEST KOMPUTEROWA ANALIZA SYSTEMÓW POMIAROWYCH?
Pojęcie to oznacza badanie układów pomiarowych poprzez symulację ich działania w komputerze. Często jest
połączona z symulacją obiektu badań (u nas systemu elektroenergetycznego).
Celem takiej symulacji może być np. optymalizacja parametrów lub struktury systemu pomiarowego bądź zba-
danie zachowania systemu pomiarowego w rozmaitych warunkach (np. zbadanie wpływu określonych zakłóceń
na błędy pomiaru).
Symulacja ma kilka zalet w porównaniu z eksperymentami rzeczywistymi:
• symulacja jest często znacznie tańsza gdyż nie wymaga użycia drogich elementów systemu,
• elementy symulowane nie mogą ulec uszkodzeniu,
• eksperymenty symulacyjne są bezpieczne dla obsługi (w odróżnieniu od pomiarów na wysokim napięciu),
• pozwala na niezależną analizę wybranych czynników, które w rzeczywistości występują jednocześnie,
Oczywiście symulacja ma również istotne wadę polegającą na tym, że jej wyniki mogą znacznie różnić się od
wyników uzyskanych w rzeczywistych eksperymentach. Wiarygodność wyników zależy od tego jak dokładnie
zamodelowaliśmy dane zjawisko (sygnał, zakłócenia) lub obiekt (system pomiarowy).
Budowanie modeli bardzo dokładnie odzwierciedlających rzeczywistość najczęściej jest niepotrzebne i jest zbyt
czasochłonne. Poza tym wymaga bardzo dużej wiedzy o modelowanym obiekcie/zjawisku. Ponadto symulacje
skomplikowanych modeli trwają dłużej, ze względu na złożoność obliczeniową modeli.
Dlatego na ogół modelujemy zjawiska i obiekty korzystając z daleko idących uproszczeń, t.j. modelujemy tylko
tą funkcjonalność, która jest istotna z punktu widzenia analizy. Trzeba pamiętać, aby wyników symulacji nie
traktować bezkrytycznie.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 2/
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
2. NARZĘDZIA ANALIZY SYSTEMÓW POMIAROWYCH
Dostępne jest wiele narzędzi i pakietów symulacyjnych. Niektóre są uniwersalne, a niektóre przeznaczone są do
zastosowań specjalizowanych:
• Matlab i Simulink — komercyjny, wieloplatformowy pakiet do obliczeń numerycznych ogólnego zastoso-
wania, dostępne są Toolboxy i Blocksety rozszerzające możliwości, zawierające narzędzia związane z okre-
ślonymi dziedzinami np.: Sim Power Systems, Sim Mechanics, Signal Processing, Identification, Control
System, Financial, Video Processing, itd. Na zajęciach będziemy korzystali z tego pakietu.
• Octave — darmowy, open–source, wieloplatformowy program obliczeniowy o składni bardzo zbliżonej do
Matlaba, w sieci mozna znaleźć wiele pakietów rozszerzających jego możliwości, nie posiada narzędzia
o funkcjonalności Simulinka, pewnym odpowiednikiem może być progam SciCraft,
• Scilab — darmowy, open–source, wieloplatformowy program obliczeniowy o składni bardzo zbliżonej do
Matlaba, w sieci istnieje wiele specjalozowanych rozszerzeń (np. do analizy Systemu Energetycznego),
umożliwia obliczenia rozproszone, współpracę z LabView, współpracę ze sprzętem jak DSP i karty pomia-
rowe firmy National Instruments,
• MicroCap — komercyjny program do symulacji i analizy obwodów elektronicznych, tylko dla Windows,
umożliwia dosyć dokładną symulację elementów elektronicznych stosowanych w obwodach pomiarowych,
zawiera obszerne biblioteki dostępnych na rynku elementów,
• Spice — engine do symulacji obwodów elektronicznych (pozbawiony interfejsu użytkownika), pierwowzór
wielu programów do symulacji elektroniki, takich jak komercyjne: H-Spice, P-Spice, oraz darmowe LT-
Spice i NG-Spice). Komercyjne odpowiedniki posiadają bogate biblioteki elementów zamodelowanych
z najdrobniejszymi szczegółami wynikającymi np. z technologii produkcji układów,
• EMTP, ATP — komercyjny (pierwszy) i darmowy (drugi) pakiety do symulacji pracy systemu elektroener-
getycznego, obsługa spartańska, ceniony ze względu na szybkość działania (całkowanie metodą trapezów),
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 3/
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
3. SYGNAŁY POMIAROWE WYKORZYSTYWANE W BADANIACH SYMULACYJNYCH
Sygnał pomiarowy to wielkość fizyczna oddziałująca na czujnik i niosąca informacje o wielkości mierzonej.
Sygnały pomiarowe możemy podzielić na zdeterminowane i losowe (stochastyczne). Pierwsze możemy opisać
wprost (za pomocą funkcji), drugie tylko poprzez wielkości opisujące losowość sygnału. Inny podział rozróżnia
sygnały dyskretne (znane tylko w wybranych chwilach czasu) i ciągłe.
W praktyce pomiarowej najczęściej spotykamy zaszumiony sygnał zdeterminowany, znany w momentach próbko-
wania. Sygnały ciągłe zdeterminowane są stosowane w analizie jako uproszczone modele rzeczywistych sygnałów.
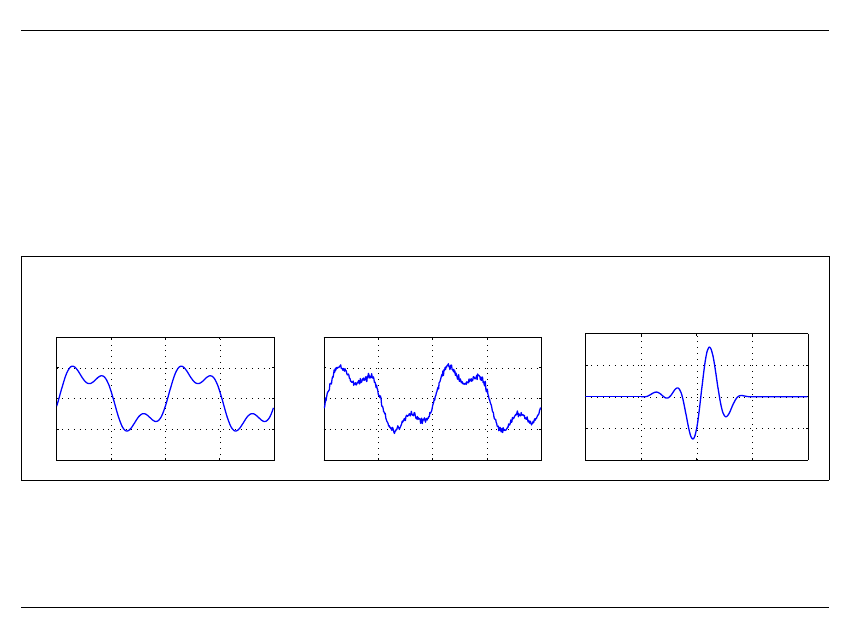
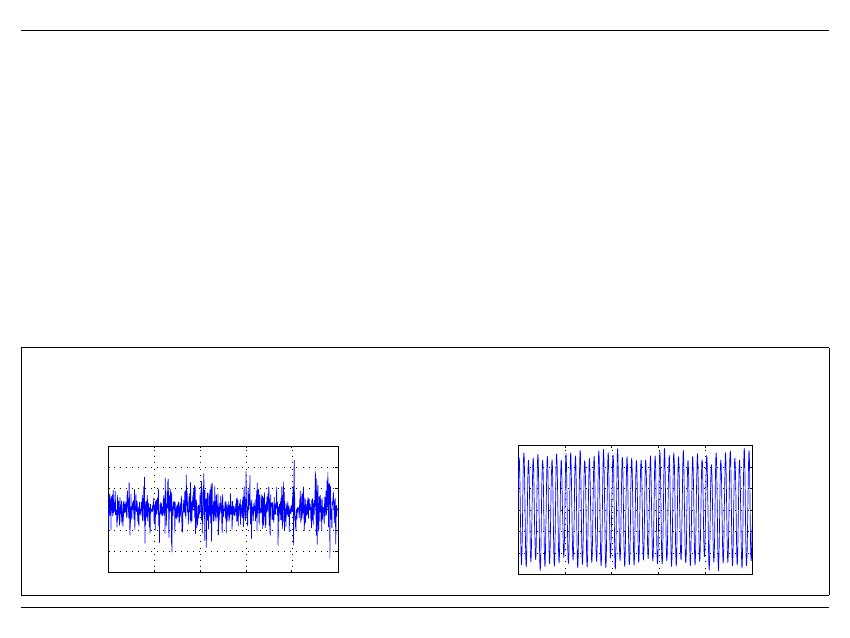
Przykłady sygnałów
Od lewej: sygnał deterministyczny okresowy, (dwie składowe sinusoidalne); sygnał deterministyczny (jak poprzedni) z szumem
skwantowany 8–mio bitowo; sygnał deterministyczny, nieokresowy (przejściowy).
0
0.01
0.02
0.03
0.04
−200
−100
0
100
200
0
0.01
0.02
0.03
0.04
−200
−100
0
100
200
0
0.01
0.02
0.03
0.04
−20
−10
0
10
20
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 4/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
4. DOBÓR CZĘSTOTLIWOŚCI PRÓBKOWANIA GENEROWANYCH SYGNAŁÓW
W generowaniu sygnałów zdeterminowanych najczęściej wykorzystujemy przygotowany wcześniej wektor czasu:
t = (0:N-1)*ts; gdzie N jest ilością próbek, a ts jest okresem próbkowania.
Generując sygnały musimy odpowiednio dobrać częstotliwość ich próbkowania, aby uniknąć powstania aliasingu.
4.1. Zjawisko aliasingu w dziedzinie częstotliwości i czasu
Aliasing oznacza nakładanie się widm. Jest to zjawisko związane z tym, że w wyniku operacji próbkowania,
widmo oryginalne zostaje powtórzone co częstotliwość próbkowania oraz zostaje symetrycznie odbite względem
częstotliwości zerowej. Przy nieodpowiedniej częstotliwości próbkowania powtórzone widma nakładają się na
siebie [
Aliasing w dziedzinie czasu może byc rozumiany jako niejednoznaczność odwzorowania sygnału na podstawie
jego próbek: jeżeli nie znamy górnej częstotliwości sygnału oryginalnego to nie możemy go jednoznacznie od-
wzorować na podstawie jego próbek, gdyż próbki te można połączyć sinusoidami o różnych częstotliwościach.
Wizualnie zjawisko to jest widoczne w postaci iluzorycznego obrazu sinusoidy o częstotliwości innej niż faktyczna
częstotliwość.
4.2. Twierdzenie o próbkowaniu
Aby na podstawie próbek poprawnie (jednoznacznie) odtworzyć dolnopasmowy sygnał, musi on zostać sprób-
kowany z częstotliwością ponad dwa razy większą niż najwyższa częstotliwość w sygnale czyli:
f
s
> 2f
g
(1)
gdzie f
s
=
1
t
s
częstotliwość próbkowania oraz f
g
to najwyższa częstotliwość w analizowanym sygnale. W przy-
padku sygnałów poliharmonicznych, f
g
jest częstotliwością najwyższej interesującej nas harmonicznej.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 5/
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
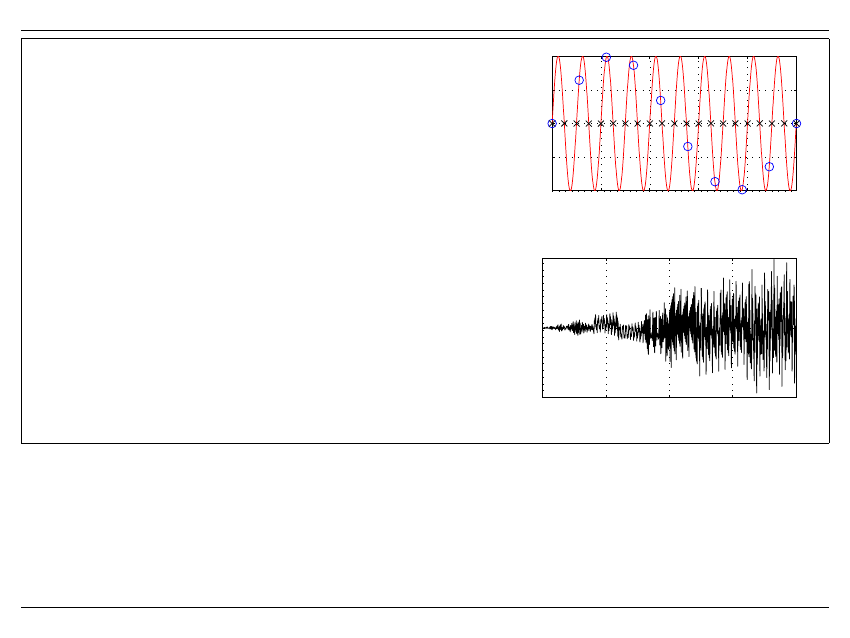
Przykład aliasingu w dziedzinie czasu
f = 10 Hz, f
s
= 1000 Hz, poprawne próbkowanie, jednoznaczne przy
znanym f
g
(tutaj f
g
= f )
f = 10; fs = 1000; ts = 1/fs; clf % poprawne
t = 0:ts:1; x = sin(2*pi*f*t); plot(t,x,’r-’)
f = 10 Hz, f
s
= 9 Hz, niepoprawne próbkowanie, przez próbki można
poprowadzić wiele sinusoid ⇒ niejednoznaczność
f = 10; fs = 9; ts = 1/fs; hold on % niepoprawne
t = 0:ts:1; x = sin(2*pi*f*t); plot(t,x,’bo’)
f = 10 Hz, f
s
= 20 Hz, niepoprawne próbkowanie, możemy trafić
w przejścia przez zero (patrz rysunek obok i skala osi Y)
f = 10; fs = 20; ts = 1/fs; hold on % niepoprawne
t = 0:ts:1; x = sin(2*pi*f*t); plot(t,x,’kx’)
0
0.2
0.4
0.6
0.8
1
−1
−0.5
0
0.5
1
Czas [s]
0
10
20
30
40
−5
0
5
x 10
−13
Czas [s]
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 6/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
5. SYGNAŁY ZDETERMINOWANE
W badaniach symulacyjnych najczęściej wykorzystujemy zdeterminowane sygnały syntetyczne, generowane
w programie symulacyjnym, ponieważ dobrzez znamy ich własności. Sygnał zdeterminowany to taki, którego
kolejne wartości jesteśmy w stanie przewidzieć na podstawie poprzednich wartości.
5.1. Sygnały okresowe
monoharmoniczne składają się z jednej składowej x (t) = A sin(2πft + ϕ)
poliharmoniczne składają się z wielu składowych sinusoidalnych x (t) =
P
K
k=1
A
k
sin(2πkf
1
t + ϕ
k
), gdzie f
1
to
częstotliwość podstawowa. Sygnały okresowe posiadają widmo prążkowe, prążki widma mogą znajdować
się tylko przy częstotliwościach harmonicznych f
k
= kf
1
gdzie k ∈ N.
5.2. Sygnały nieokresowe
sygnały prawie okresowe są złożeniem wielu składowych sinusoidalnych, np. x (t) =
P
K
k=1
A
k
sin(2πf
k
t +ϕ
k
),
których częstotliwości f
k
nie są związane harmonicznie, czyli mogą przyjmować dowolne wartości (w
nomenklaturze energetycznej są to sygnału posiadające tzw. subharmoniczne). Widmo sygnału prawie
okresowego jest również prążkowe, ale prążki mogą być rozłożone w dowolny sposób.
sygnały przejściowe to inne sygnały opisane znaną funkcją czasu np. x (t) = A exp(−
t
T
) lub x (t) =
1
t
2
.
Posiadają widmo ciągłe — nie można w nim wyróżnić niezależnych prążków.
5.3. Generowanie sygnałów okresowych (i prawie okresowych)
Matlab udostępnia funkcje generujące typowe sygnały okresowe: sin, cos, tan, square, sawtooth,
tripuls
Sygnały poliharmoniczne możemy generować poprzez klasyczne sumowanie składowych:
x = A1 * sin(2*pi*f1*t+fi1) + A3 * sin(2*pi*f3*t+fi3) + ... ;
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 7/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
lub przez sumowanie w postaci wektorowej:
fs = 10e3; ts = 1/fs; t = (0:10e3-1)*ts; % częstotliwość próbkowania, wektor czasu
A = [100 9 7 5]; % wektor (poziomy) amplitud harmonicznych
f = 50 * [1 3 5 13]’; % wektor (pionowy) częstotliwości składowych (tutaj harmoniczne)
fi = [0 -0.7 .41 0.2]’; % wektor (pionowy) faz [radiany]
x = A * sin( 2*pi*f*t + fi*ones(1,length(t)) ); % generowanie sygnału
5.4. Generowanie sygnałów nieokresowych
Do generowania sygnałów nieokresowych Matlab udostępnia wiele funkcji matematycznych: exp, log, log2,
log10, chirp, diric, gauspuls, pulstran, rectpuls, sinc, asin, asinh, abs, sqrt, itd.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 8/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
6. SYGNAŁY LOSOWE
Czasami całkowita przewidywalność sygnałów testowych jest nieporządana. Ma to miejsce np. w analizie sy-
gnałów zakłóconych. Do idealnych sygnałów zdeterminowanych (określonych znanymi funkcjami czasu) wtedy
możemy dodać zakłócenia w postaci wartości z generatora liczb pseudolosowych.
Kolejnej wartości prawdziwego sygnału losowego, nie jesteśmy w stanie przewidzieć na podstawie wartości
wcześniejszych. Do opisu sygnałów losowych używamy zatem parametrów statystycznych takich jak:
rozkład prawdopodobieństwa sygnału , np. normalny, a dokładnie funkcja gęstości prawdopodobieństwa
p(x ) sygnału losowego x . Określa prawdopodbieństwo przyjęcia przez sygnał losowy x wybranej wartości.
wartość oczekiwana sygnału µ = E[x ] =
+∞
Z
−∞
xp(x )dx
wariancja sygnału σ
2
= E
2
[x ] =
+∞
Z
−∞
(x − µ)
2
p(x )dx
Parametrów opisujacych statystykę sygnału jest więcej. Powyżej wymieniono najczęściej stosowane.
6.1. Typowe rozkłady prawdopodobieństwa
Generatory pseudolosowe dają liczby opisane określonym rozkładem prawdopodobieństwa. Najczęściej są Gaussa
czyli normalnym lub równomiernym). Odpowiednio skalując te liczby uzyskujemy pożądane lecz stałe (niezmien-
ne) wartości statystycznych parametrów (wartość oczekiwana, wariancja) generowanego zakłócenia. Inne ważne
rozkłady to np.: rozkład χ
2
, rozkład T –studenta, rozkład F –Snedecora, rozkład Γ.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 9/
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
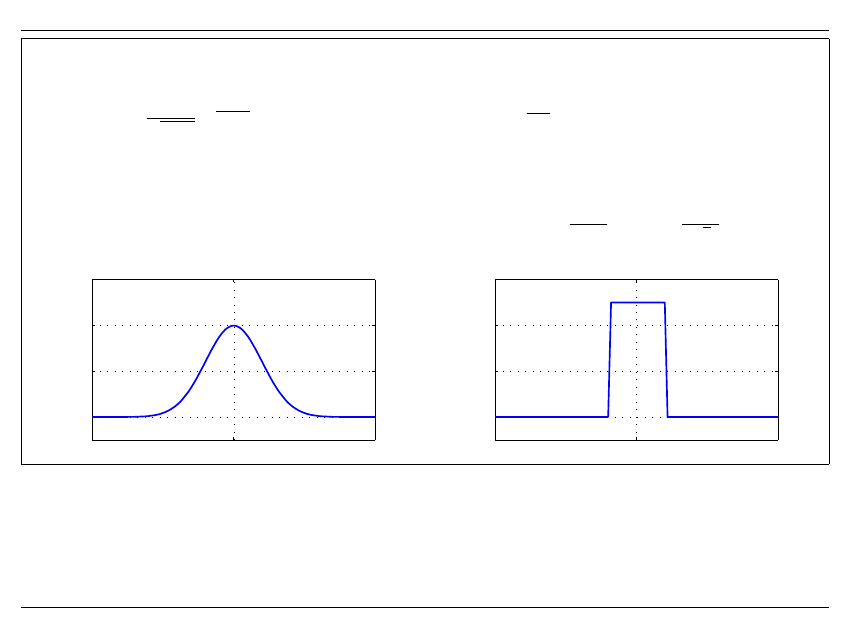
Rozkład normalny
wykorzystywany jako model np. szumów termicznych
p(x ) =
1
√
2πσ
2
e
−
(x −µ)2
2σ2
,
x ∼ N(µ, σ)
x — wartość zmiennej losowej (sygnału losowego)
µ — wartość oczekiwana sygnału x
σ
2
— wariancja sygnału x
Rozkład równomierny
wykorzystywany jako model np. szumu kwantowania
p(x ) =
1
b−a
dla
a < x < b
0
dla pozostaych x
,
x ∼ R(a, b)
(b − a) — szerokość rozkładu jednostajnego
µ =
b − a
2
,
σ =
b − a
√
3
−5
0
5
0
0.2
0.4
N (0,1)
−5
0
5
0
0.2
0.4
R (−1,1)
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 10/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
6.2. Sygnały stacjonarne, ergodyczne i niestacjonarne
Sygnały losowe można podzielić na:
sygnały stacjonarne czyli takie, których parametry statystyczne nie ulegają zmianow w czasie (np. szum
termiczny tranzystora w stałych warunkach temperaturowych; zakłócenia generowane przez prostownik
impulsowy o stałym obciążeniu),
sygnały niestacjonarne czyli takie, których parametry statystyczne zmieniają się w czasie (np. szum termiczny
tranzystora od włączenia do urządzenia do ustalenia się warunków temperaturowych; zakłócenia genero-
wane przez pracujący piec łukowy; sygnały energetyczne rozpatrywane w przedziałach kilkugodzinnych
i dłuższych),
sygnały lokalnie stacjonarne czyli takie, których parametry statystyczne zmieniają się w czasie na tyle powoli,
w stosunku do czasów analizy, że w tych krótkich okresach czasu mogą być traktowane jako stajonarne (np.
sygnały energetyczne, rozpatrywane w przedziałach o długości do kilku okresów; częstotliwość systemu
energetycznego rozptrywana w przedziałach do kilku sekund)
Nie są to definicje ścisłe, ale za to zrozumiałe dla każdego. Dokładne definicje mozna znaleźć np. w [
W zasadzie taką klasyfikację sygnałów można zastosować również dla sygnałów zdeterminowanych (stąd niektóre
powyższe przykłady). Przykładowo dla sygnału sinusoidalnego o amplitudzie A można wyznaczyć wariancję
σ
2
równą
A
2
2
. Jeżeli sygnał ten poddamy modulacji amplitudy to A = A(t) = var co oznacza, że parametr
statystyczny σ
2
, estymowany na podstawie fragmentów sygnału krótszych od okresu modulacji, również się
zmienia ⇒ sygnał jest niestacjonarny.
Sygnał ergodyczny to taki, w którym operację uśredniania po zbiorze realizacji (uzyskanych w drodze powta-
rzania eksperymentu, w którym sygnał jest generowany) można zastąpić operacją uśredniania po czasie, jednej,
odpowiednio długiej, realizacji sygnału (szczegóły w [
]). Sygnały niestacjonarne nie są ergodyczne!
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 11/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
Istotne jest, że w zasadzie większość sygnałów stacjonarnych jest sygnałami ergodycznymi, co pozwala na
zastąpienie przedstawionych wcześniej definicji wartości średniej poniższymi:
wartość oczekiwana sygnału µ = E[x ] = lim
T →∞
T
Z
0
x (t)dt
wariancja sygnału σ
2
= E[(x (t) − µ)
2
] = lim
T →∞
T
Z
0
(x (t) − µ)
2
dt
wartość średniokwadratowa sygnału Ψ
2
= lim
T →∞
T
Z
0
x
2
(t)dt = σ
2
+ µ
2
wartość skuteczna sygnału to pierwiastek wartości średniokwadratowej: x
RMS
=
q
Ψ
2
x
. Jeżeli wartości średnia
sygnału jest zerem, co w przypadku napięcia sieci energetycznej zazwyczaj jest prawdą, wartość skuteczna
jest równa odchyleniu standardowemu σ
x
sygnału x czyli x
RMS
=
q
σ
2
x
= σ
x
.
6.3. Generowanie sygnałów pseudolosowych stacjonarnych
Matlab posiada dwa generatory szumu białego (czyli takiego, którego moc jest równo rozłożona w dziedzinie
częstotliwości lub inaczej widmowa gęstość mocy G (f ) jest stała) o rozkładach normalnym i równomiernym.
Inne znane rodzaje szumu to: szum różowy, którego gęstość widmowa mocy G (f ) maleje jak
1
f
i szum brązowy,
którego gęstość widmowa mocy maleje jak
1
f
2
.
Ciąg liczb pseudolosowych o rozkładzie normalnym daje polecenie randn(rows, cols), gdzie rows i cols
określają rozmiar macierzy (ilość wierszy i kolumn). Parametry rozkładu to µ = 0 i σ = 1. Jeśli chcemy
inne parametry to musimy wygenerowane liczby pomnożyć przez pożądane odchylenie standardowe, a następnie
dodać do nich żądaną wartość oczekiwaną.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 12/
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
Podobnie działa polecenie rand, przy czym zwraca liczby o rozkładzie równomiernym, z zakresu od 0 do 1, np.
polecenie x = rand(10,1) daje kolumnę (wektor pionowy) 10 liczb z zakresu [2
−53
; 1 − 2
−53
].
Należy pamiętać, że wszystkie generatory liczb losowych posiadają skończony okres po, którym generowany ciąg
liczb zacznie się powtarzać. Wobec tego sygnał niestacjonarny, uzyskany w wyżej opisany sposób, rozpatrywany
w horyzoncie czasowym kilku okresów generatora można/należy uznać za okresowy. Na szczęście okresy gene-
ratorów są zazwyczaj wystarczająco długie dla większości zostosowań. Przykładowo, w Matlabie 7.4, generator
rand, z domyślnym algorytmem, ma okres (2
19937−1
)/2, a generator randn ma okres w przybliżeniu równy 2
64
.
6.4. Generowanie sygnałów niestacjonarnych
Sygnał niestacjonarny można uzyskać przez filtrację dolnoprzepustową szumu białego.
es = randn(1,1000); B = fir2(15,[0 0.005 0.1 1],[100 1 0 0]); en = filter(B,1,es);
Taki sygnał możemy wykorzystać do skalowania (modulacji) wybranego parametru sygnału stacjonarnego.
Przykład niestacjonarnej modulacji odchylenia stan-
dardowego zakłóceń stacjonarnych:
e = (1+en) .* ew;
0
0.2
0.4
0.6
0.8
1
−6
−4
−2
0
2
4
6
Przykład modulacji amplitudy sygnału sinusoidalnego:
t = (0:999)*0.001; f = 50; A = 5;
v = (1+0.2*en) * A .* sin(2*pi*f*t);
0
0.2
0.4
0.6
0.8
1
−6
−4
−2
0
2
4
6
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 13/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
7. SYGNAŁY RZECZYWISTE
Z reguły rzeczywiste sygnały pomiarowe są sygnałami zdeterminowanymi z dodaną składową losową pocho-
dzącą od zakłóceń (szumów i sygnałów niemierzonych) oraz wynikającą z działania toru pomiarowego (szumy
demodulacji, szum kwantowania)
Czasami, jeżeli zależy nam by sygnały używane w badanich symulacyjnych posiadały pewne trudne do zasy-
mulowania własności (np. zmienną częstotliwość, zmienną zawartość harmonicznych, wiele podharmonicznych),
rozwiązaniem może być wykorzystanie sygnałów rzeczywistych. Możemy wykorzystać np. sygnały prądu i napię-
cia zarejestrowane w systemie energetycznym.
Trzeba jednak pamiętać, że zastosowany przy ich rejestracji system pomiarowy może spowodować, że własno-
ści sygnału zarejestrowanego będą inne niż własności sygnału mierzonego (rzeczywisty). Przykłady: tłumienie
oraz przesunięcie fazowe wyższych częstotliwości powodowane przez przekładniki napięciowe wyższych napięć;
pojawienie się nieistniejących w mierzonym sygnale harmonicznych powodowane przez nieliniowość przekładnika
prądowego pracujacego z prądem pierwotnym kilkakrotnie przekraczającym prąd znamionowy.
Innym rozwiązaniem jest zbudowanie modelu systemu generującego w naturalny sposób sygnały o zadanych
własnościach (np. model systemu energetycznego z elementów Sim Power Systems Blockset), przy czym model
taki musi być odpowiednio skomplikowany, aby odzwierciedlić naturę rzeczywistego obiektu.
7.1. Import/export plików
Oprogramowanie dołączone do systemów akwizycji danych praktycznie zawsze udostępnia zapis surowych da-
nych binarnych (raw data). Często też możliwe jest także wyeksportowanie sygnałów w jednym z popularnych
formatów, np. matlabowski .mat
Matlab do przechowywania zmiennych, sygnałów, struktur, itp. wykorzystuje pliki binarne z rozszerzeniem .mat.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 14/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
Są to pliki o podanej w dokumentacji specyfikacji, więc możliwe jest napisanie własnych konwerterów. W jednym
takim pliku można zapisać wiele zmiennych z przestrzeni (workspace) Matlaba. Domyślnie polecenie save
plik.mat zapisuje wszystkie zmienne w pliku plik.mat, a polecenie save plik.mat A b, zapisze w tym
pliku tylko zmienne A oraz b. Wczytujemy dane poleceniem load. Poleceniem load plik.mat A ładuje tylko
zmienną A. Liczby w plikach .mat są zapisywane w formacie takim w jakim są reprezentowane w przestrzeni
Matlaba, czyli domyślnie jako typ double (64–bity). Zapis i odczyt zmiennych z plików .mat jest możliwy tylko
w całości, nie można wczytać np. fragmentu wektora zawierającego sygnał.
Polecenia load i save z opcją -ascii pozwalają też na zapis i odczyt danych w formacie tekstowym.
Obsługa surowych danych, funkcje niskopoziomowe
Ze względu na to, że przetworniki stosowane w systemach akwizycji mają na ogół od 12 do 16 bitów, możemy się
spodziewać danych w postaci liczb całkowitych bez znaku (z zakresu od 0 do 2
16
− 1 = 65535 dla 16–bitowego
A/C), zapisanych na dwóch bajtach na każdą próbkę sygnału. W przypadku rejestrowania kilku sygnałów, próbki
będą przeplatane w kolejności skanowania kanałów analogowych (zapis kolejnych skanów). Po odczytaniu dane
te należy przeskalować na jednostki fizyczne.
Do odczytu/zapisu surowych danych binarnych wykorzystujemy funkcje niskopoziomowe fread, fwrite, fseek,
uzupełnione o funkcje otwarcia i zamknięcia pliku fopen i fclose. Znaczenie tych funkcji jest takie samo jak
odpowiednich funkcji języka ANSI C, składnia nieco inna, ale opisana w helpie.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 15/
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
Przykład: odczyt 80 próbek kanału 0, poczynając od 11 skanu (40 bajtu), z pliku, w którym zapisano dwa
sygnały. Próbki 16 bitowe, całkowite bez znaku. W pliku zapisano kolejne skany, każdy skan to próbki z dwóch
kanałów, więc kolejność w pliku to: kanał 0, kanał 1, kanał 0, kanał 1, itd.
fmode = ’r’; % rodzaj dostepu do pliku: odczyt
precision = ’uint16’; % format probek: calkowite, 16-to bitowe, bez znaku
endian = ’l’; % kolejnosc bajtow w probce: little-endian
skipsize = 1; % ilosc przeskakiwanych probek
origin
= ’bof’; % odniesienie dla przesuniecia wskaznika: tu początek pliku, bajt 0
start
= 40; % pierwszy odczytywany bajt
readsize = 80; % ilosc odczytywanych probek
fin
= fopen(filename, fmode, endian); % otwarcie pliku
status = fseek(fin, start, origin); % ustawienie wskaźnika odczytu na origin+start
[seg, samplesread] = fread(fin, readsize, precision, skipsize); % odczyt próbek
fclose(fin); % zamknięcie pliku
seg = seg / 2^15 - 1; % skalowanie próbek do zakresu [-1; 1)
8. SYGNAŁY W SIMULINKU
Wiele modeli systemów pomiarowych wygodnie jest analizować w Simulinku, który pozwala na symulację z cza-
sem ciągłym. Czas ciągły może być wykorzystany np. w badaniu modeli przetwarzania A/C.
Simulink pozwala na wewnętrzne generowanie sygnałów. Udostępnia wiele źródeł typowych sygnałów w katalogu
Sources. Dodatkowe źródła są dostępne w blocksetach takich jak Signal Processing Blockset.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 16/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
8.1. Import/export
Jako sygnały możemy też wykorzystać dane zapisanych w przestrzeni Matlaba lub na dysku w postaci plików
.mat. Do odczytu służą odpowiednio bloczki From Workspace oraz From File, a do sapisu odpowiednio
bloczki To Workspace oraz To File. Wadą tych bloków jest wczytywanie całego pliku/wektora przed symulacją
oraz zapis całego wektora lub pliku po zakończeniu symulacji. Nie jest możliwe w ten sposób wczytywanie
wybranych fragmentów sygnałów.
Trzeba pamiętać, że odczytywane dane muszą zawierać także wektor czasu, w których są podane chwile czasowe
próbek (szczegóły w helpie). W przypadku zapisu danych blokami To Workspace oraz To File warto podać
w opcjach okres próbkowania sygnałów, gdyż domyślnie jest on dziedziczony od poprzedzającego go bloku, co
przy symulacjach z czasem ciągłym może dawać nierównomiernie spróbkowane sygnały wyjściowe (próbkowane
ze zmiennym krokiem).
8.2. Interpolacja sygnałów
Sygnały odczytywane blokiem From Workspace mogą być liniowo interpolowane (domyślne). Ma to znacze-
nie w symulacjach z czasem ciągłym (domyślne), podczas których Simulink, może oczekiwać od bloku From
Workspace zwrócenia wartości sygnału w chwili pomiędzy jego próbkami. Jeżeli wyłączymy interpolację, to
zwrócona zostanie wartość ostatniej próbki sygnału (tzw. zero order hold — podtrzymanie zerowego rzędu).
Blok From File nie oferuje interpolacji. Aby zatem uzyskać sygnały gładkie (płynnie zmieniające swoje wartości)
trzeba zastosować blok filtra analogowego np. Analog Filter Design (np. Butterworth lub Bessel 4 rzędu)
z katalogu Signal Processing Blockset/Filtering/Filter Designs.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 17/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
9. PROBLEM DŁUGICH SYGNAŁÓW
Czasami w badaniach symulacyjnych musimy zastosować bardzo długie sygnały, które nie mieszczą się jednora-
zowo w pamięci komputera. Ma to miejsce gdy chcemy przeprowadzić na sygnałach analizę statystyczną, która
z reguły, aby jej wyniki były wiarygodne wymaga licznej próby.
Długie sygnały można podzielić na kolejne bloki o zadanej długości, które będą odczytywane i zapisywane na
dysk za pomocą funkcji niskopoziomowych fread, fwrite. Wymaga to często zmian konstrukcji algorytmów
analizy. Przypominam, że w przypadku długich sygnałów najłatwiej używać tylko z plików w których dane są
zapisywane sekwencyjnie w możliwie prosty sposób. Korzystanie do tego celu plików typu .mat, ze względu na
skomplikowaną strukturę wewnętrzną (np. kompresja danych) wiąże się z dużymi komplikacjami.
9.1. Długie sygnały w Simulinku
Problem komplikuje się w przypadku Simulinka, gdyż nawet niskopoziomowe wczytywanie fragmentów plików do
przestrzeni Matlaba nie pomaga, gdyż blok From Workspace odczytuje dane tylko raz, na początku symulacji
i tym samym pozwoli na odczytanie tylko jednego bloku danych.
Rozwiązaniem problemu jest użycie bloku S-Function, który pozwala na wykonanie kodu napisanego w języki
Matlab (lub C, Fortra, Ada). Składnia S-Funkcji jest skomplikowana i opisana niezbyt przystępnie w helpie.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 18/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
10. SIMPOWERSYSTEMS BLOCKSET
SimPowerSystems Blockset jest zestawem bloków Simulinka służącym do modelowania i analizy systemu elek-
troenergetycznego. Modele takie mogą być cennym źródłem sygnałów używanych w symulacjach.
Blockset zawiera takie elementy jak:
• źródła (generatory jedno i trójfazowe, sterowane zewnętrznym sygnałem źródła prądu i napięcia),
• elementy bierne R, L, C, ich połączenia, modele linii,
• maszyny elektryczne (transformatory, maszyny synchroniczne i asynchroniczne),
• elementy przełączane (wyłączniki sterowane, bezpieczniki, pochłaniacze energii, odgromniki),
• elementy energoelektroniczne (mostki diodowe, tranzystorowe, tyrystorowe, falowniki, prostowniki, itd.)
• elementy systemów pomiarowych (idealne) służące do połączenia ze standardowymi blokami Simulinka,
• bloki analizy (fazory, dyskretyzacja czasowa, linearyzacja, analiza częstotliwościowa, itd.)
10.1. Wymiana danych z Simulinkiem
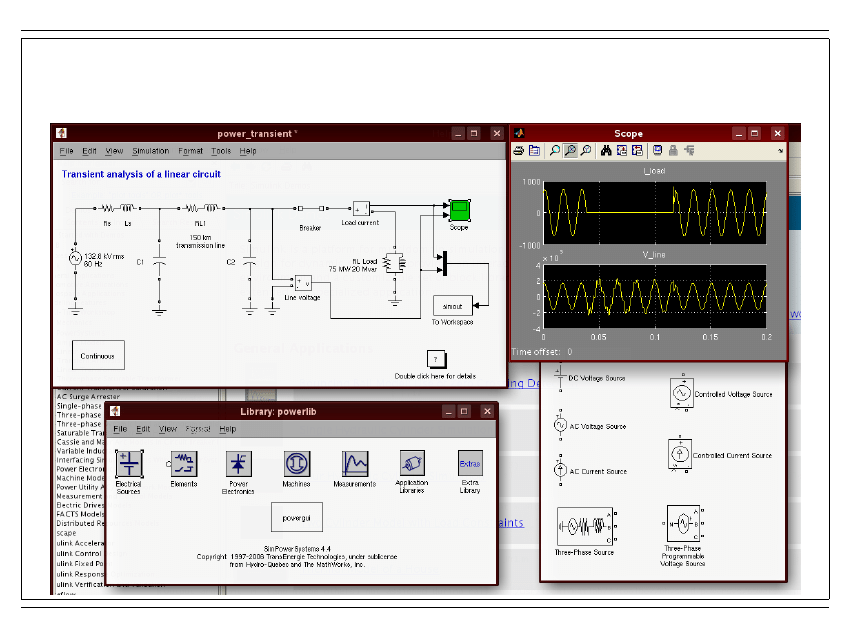
Sygnały używane w modelach SimPowerSystems Blockset są niekompatybilne ze zwykłymi sygnałami Simulinka.
Aby wygenerować np. napięcie w modelu SimPowerSystems o kształcie takim jak wybrany sygnał Simulinka
musimy użyć sterowanego źródła napięcia Controlled Voltage Source lub prądu Controlled Current
Source. Sygnałem sterującym dla tego bloku może być dowolny sygnał Simulinka.
Analogicznie jest w drugą stronę. Aby za pomocą standardowych bloków Simulinka obrabiać sygnał z modelu
SimPowerSystems Blockset musimy prądy i napięcia modelu zamienić na standardowe sygnały Simulinka za
pomocą bloków pomiarowych Current Measurement i Voltage Measurement.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 19/
ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
Przykład: eksport sygnałów z modelu systemu zbudowanego z bloków SimPowerSystems Blockset, poprzez
bloki pomiarowe (Load Current i Line Voltage) i standardowe bloki Simulinka (To Workspace) do prze-
strzeni zmiennych Matlaba.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 20/

ANALIZA KOMPUTEROWA SYSTEMÓW POMIAROWYCH — MSE
LITERATURA
[1] Gajda, J.: Statystyczna analiza danych pomiarowych. AGH, Kraków, Polska, 2002.
[2] Lyons, R. G.: Wprowadzenie do cyfrowego przetwarzania sygnałów. Wydawnictwa komunikacji i łączności,
Warszawa, 1999. ISBN 83-206-1318-3.
Katedra Metrologii AGH
Wykład 1: Narzędzia analizy systemów pomiarowych.
Sygnały w badaniach symulacyjnych.
strona 21/
Document Outline
- 1. Czym jest komputerowa analiza systemów pomiarowych?
- 2. Narzedzia analizy systemów pomiarowych
- 3. Sygnaly pomiarowe wykorzystywane w badaniach symulacyjnych
- 4. Dobór czestotliwosci próbkowania generowanych sygnalów
- 5. Sygnaly zdeterminowane
- 6. Sygnaly losowe
- 7. Sygnaly rzeczywiste
- 8. Sygnaly w Simulinku
- 9. Problem dlugich sygnalów
- 10. SimPowerSystems Blockset
Wyszukiwarka
Podobne podstrony:
Program Laboratorium Komputerowe systemy pomiarowe Gawędzki KSP
Skrypt - Obsługa przyrządów pomiarowych z wykorzystaniem standardu SCPI, Nauka i Technika, Automatyk
Ćw 6 ZASTOSOWANIE STEROWNIKA PLC W KOMPUTEROWYCH SYSTEMACH POMIAROWO DIAGNOSTYCZNYCH
Program Laboratorium Komputerowe systemy pomiarowe Gawędzki KSP
2 Komputerowy system pomiaru nieparzystości odchyłek okroglosci
Obsługa aparatury pomiarowej z wykorzystaniem SCPI oraz środowiska VEE PRO, Nauka i Technika, Automa
Program Laboratorium Komputerowe systemy pomiarowe Gawędzki KSP
Komputerowy system pomiaru nieparzystych odchyłek okrągłości
Opis oprogramowania wspomagające analizę komponentów systemu komputerowego, Prace kontrolne
Komputerowy system rejestracji?nych pomiarowych PC Link Plus
Komputerowy system DAMB analizy dynamicznej budynków wysokich usztywnionych konstrukcjami ścianowymi
Komputerowy system analizy wytrzymałościowej ścianowych konstrukcji usztywniających budynki wysokie
Analiza metod ststystycznych w walidacji metod i systemów pomiarowych
Opis oprogramowania wspomagające analizę komponentów systemu komputerowego, Prace kontrolne
Komputerowy system kontyrolingowej analizy finansowej
więcej podobnych podstron