
Sprawozdanie
Ćwiczenie 1
Badanie maszyn prądu stałego : silnika bocznikowgo i prądnicy obcowzbudnej
Zasada działania silnika prądu stałego
Silnik prądu stałego składa się z wirnika (twornika) i stojana (magneśnicy). Końce uzwojenia
twornika są przyłączone do wycinków komutatora, szczotki ślizgające się po komutatorze łączą
uzwojenie twornika z obwodem zewnętrznym. Przez uzwojenie nieruchomych biegunów płynie
prąd wzbudzenia ( I
f
) wytwarzający strumień magnetyczny Φ
fa
. Rozkład indukcji Bx wzdłuż
obwodu twornika jest w osi obojętnej maszyny, zatem indukcja jest równa zeru.
Jeżeli wirnik obraca się z prędkością obrotową n, to w każdym boku jego uzwojenia indukuje się
SEM o wartości chwilowej e=-lBxV. Na zaciskach uzwojenia składającego się z dwóch boków
otrzymujemy zatem SEM 2*e => e
c
= -2BxlV. Przy stałych wartościach l i V, zmienność sem w
czasie zależy od zmienności indukcji Bx.
Komutator spełnia rolę prostownika mechanicznego, dokonując przełączeń końców uzwojenia
twornika poprzez wycinki i szczotki w chwilach gdy ec wynosi zero, dzięki temu na szczotkach
otrzymuje się sem o jednym zwrocie.
W maszynie obciążonej przez uzwojenie wirnika płynie prąd Ia. Oddziałuje on na strumień Φ
fa
o
indukcji Bx wytwarzając moment obrotowy, który dla jednego zwoju (dwóch boków) określa
zależność m
c
= ldB
x
Ia , gdzie l- czynna długość boku uzwojenia, d- średnica wirnika. W
użytkowych silnikach wirniki mają uzwojenia składające się z większej liczby 2N
a
boków.
Komutator wykonany z N
a
wycinków łączy szeregowo w zamkniętą pętlę poszczególne N
a
zwojów.
Otrzymana na szczotkach SEM (E) oraz powstały w wirniku moment elektromagnetyczny Me,
mają stałe w czasie wartości i wyrażają się zależnościami :
Dla Ω/n (rad/s)/(obr/min) :
E=C/Ce * Ω/n * Φ
fa
Me=C * Ia * Φ
fa
w przewodach twornika indukuje się SEM o wartości : E=BlV
przepływowi prądu przez twornik towarzyszy działająca nań siła mechaniczna : F=BIl
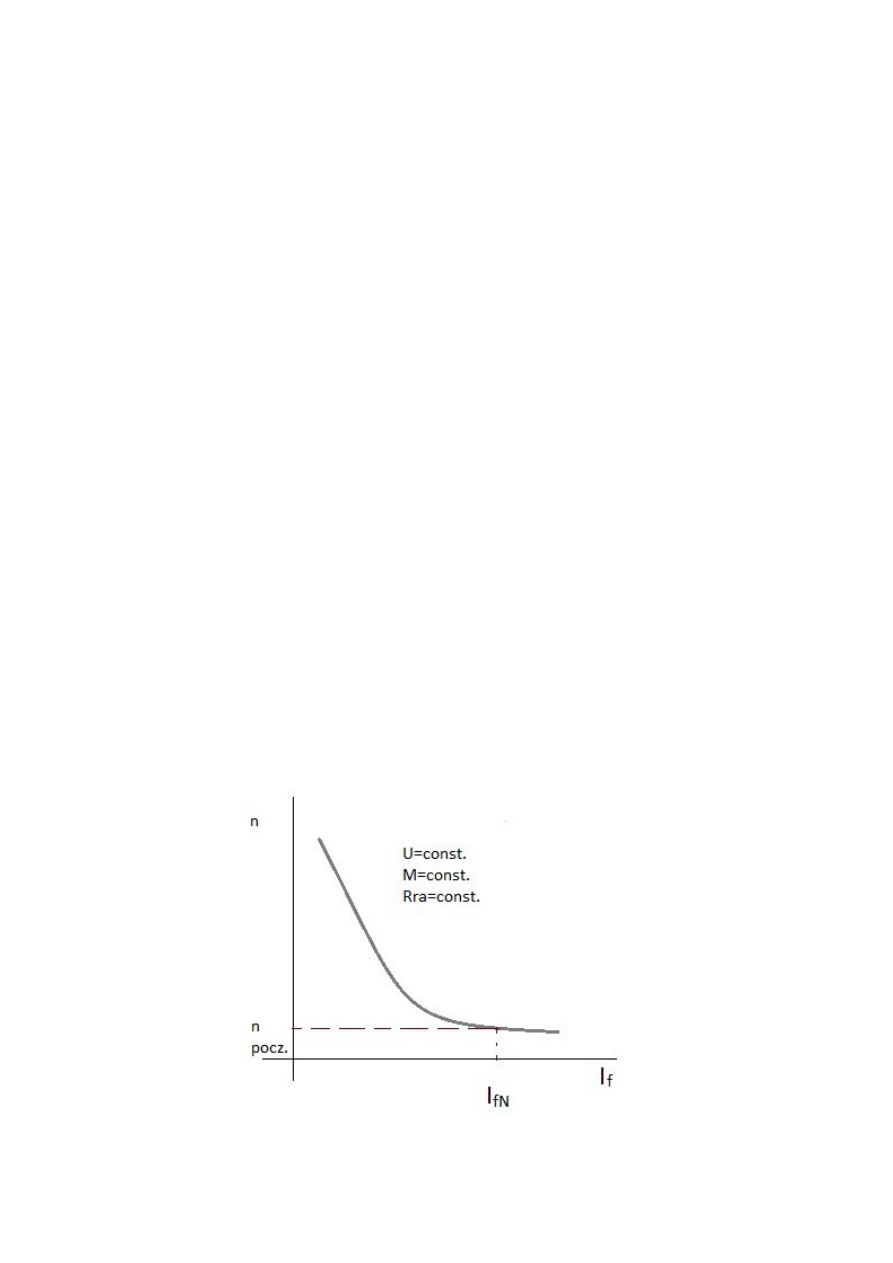
Zależność prędkości obrotowej silnika od prądu wzbudzenia If
Jeżeli zmniejszymy wartość strumienia poprzez zmniejszenie prądu wzbudzenia, to przy stałej
prędkości kątowej obniży się siła elektromotoryczna indukowana w uzwojeniu wirnika i zwiększy
się prąd Ia. Moment wytworzony przez silnik jest proporcjonalny do strumienia i do prądu
twornika. Prąd jest proporcjonalny do różnicy między stałym napięciem U i sem proporcjonalną do
strumienia. Jeżeli sem ~~ U, to niewielka zmiana E powoduje dużą zmianę różnicy U-E i dużą
zmianę prądu twornika. Dopóki E jest większa niż połowa napięcia U, dopóty zmiany prądu
twornika są większe niż wywołujące je zmiany strumienia, więc odpowiadający danej prędkości
kątowej, punkt, przesunie się w prawo.
Obniżeniu sem towarzyszy zwiększenie się prądu Ia oraz wzrost momentu napędowego silnika, a
ponieważ moment napędowy w danym punkcie pracy jest większy od momentu obciążenia,
prędkość kątowa zespołu zaczyna wzrastać. Prędkość kątowa zwiększać się będzie do chwili gdy
moment napędowy nie zostanie zrównoważony przez moment obciążenia.
Jest to jedna z metod regulacji prędkości obrotowej silnika prądu DC, (regulacja przez zmianę
strumienia wzbudzenia), polega na włączeniu (szeregowo) rezystora regulacyjnego w obwód
wzbudzenia, w celu zmniejszenia prądu wzbudzającego If. Ponieważ prąd wzbudzenia jest na ogół
mały, straty energii są niewielkie, jedynym ograniczeniem jest wytrzymałość samego silnika,
dlatego nie stosuje się większego zakresu regulacji niż 1:3.
Badanie silnika bocznikowego prądu stałego
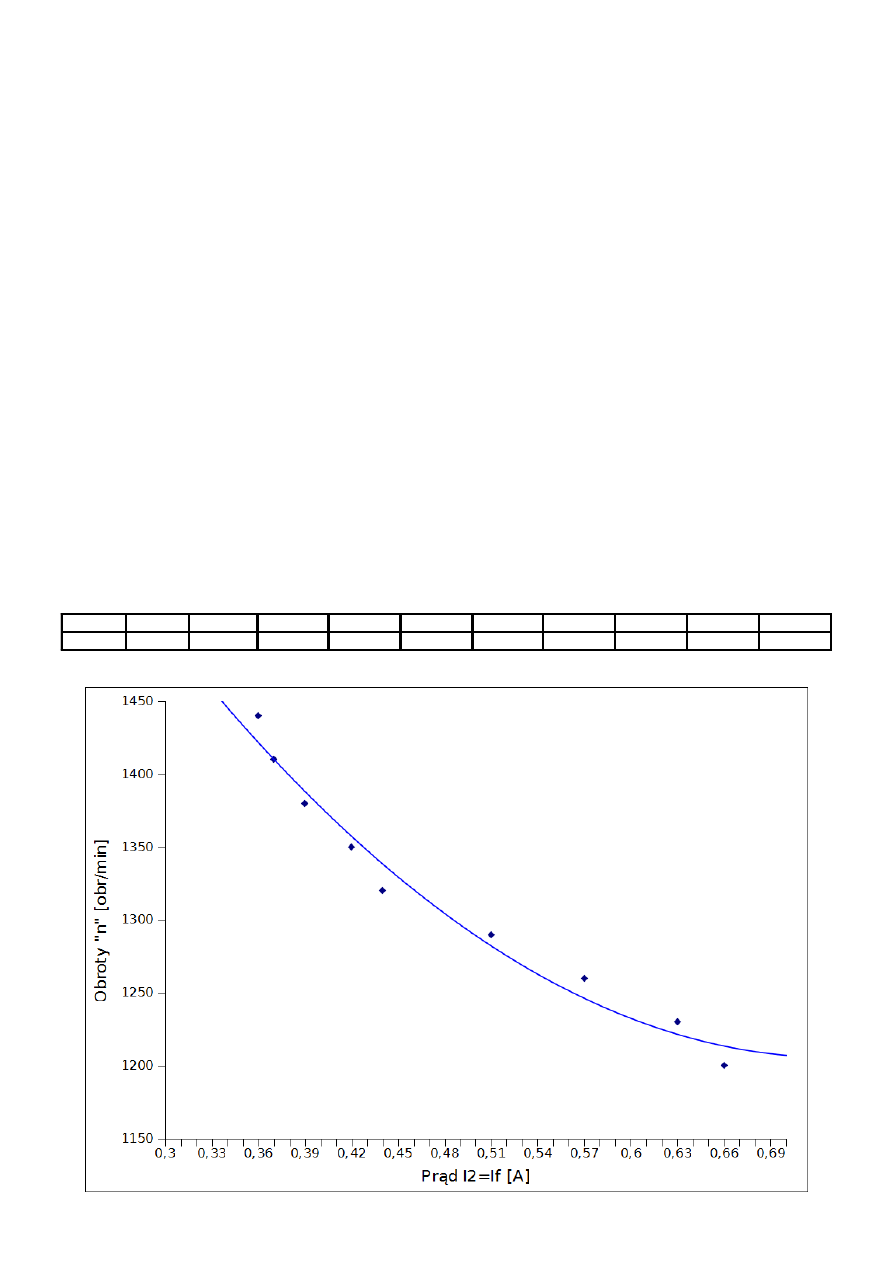
Wyznaczenie charakterystyki n = f(Ifs), w stanie biegu jałowego M~0.
n = f(Ifs)
I2=If
A
0,66
0,63
0,57
0,51
0,44
0,42
0,39
0,37
0,36
"n"
obr/min
1200
1230
1260
1290
1320
1350
1380
1410
1440
Wyznaczenie charakterystyki obciążenia mechanicznego
Korzystając z wzorów zamieszczonych w instrukcji, oraz wykresu strat w żelazie, wyznaczam
wartości P0, Ps, M, P2 oraz sprawność. Odczytane wartości strat w stali zapisuję w tabeli jako Pfe,
dodatkowo w celu obliczenia momentu obliczam P2 czyli moc na wale silnika. Rezystancję
twornika prądnicy przyjmuje jako 9 Ω, natomiast straty mechaniczne ΔPm = 30 W.
Jako ostatnie wyznaczam straty w miedzi ΔPCu :
ΔPCu = R
twp
* I
o
2
Na Podstawie uzyskanych wyników wykreślam charakterystyki obciążenia :
(Do każdego wykresu dopasowuję krzywą teoretyczną)
#
Pomiary
Obliczenia
Straty
n
U1=Uz
U3=Uo
I1=Is
I3=Io
I4=Ifp U4=Ufp
Po
Ps
M
η
Pfe
P2
obr/min
V
V
A
A
A
V
W
W
Nm
%
W
W
1
1300
260
0
0,9
0
0
0
0
264
0,22
0
0
30
2
1210
244
230
1,08
0
0,49
160
0
374,62
0,87
0
2,7
111,1
3
1190
236
220
1,3
0,7
0,46
160
154
417,31
2,12
37
2,5
264,51
4
1130
232
216
1,6
1,4
0,45
160
302,4
493,29
3,58
61
2,45
424,49
5
1120
208
208
1,8
2,1
0,44
160
436,8
516,84
4,93
85
2,35
579,24
6
1100
204
200
2
2,8
0,43
156
560
577,94
6,32
97
2,3
729,94
7
1090
200
200
2,1
3
0,42
154
600
597,98
6,80
100
2,3
777,98
Rtwp
9
Ω
ΔPM
30
W
0
0
4,41
17,64
39,69
70,56
81
Δ PCu
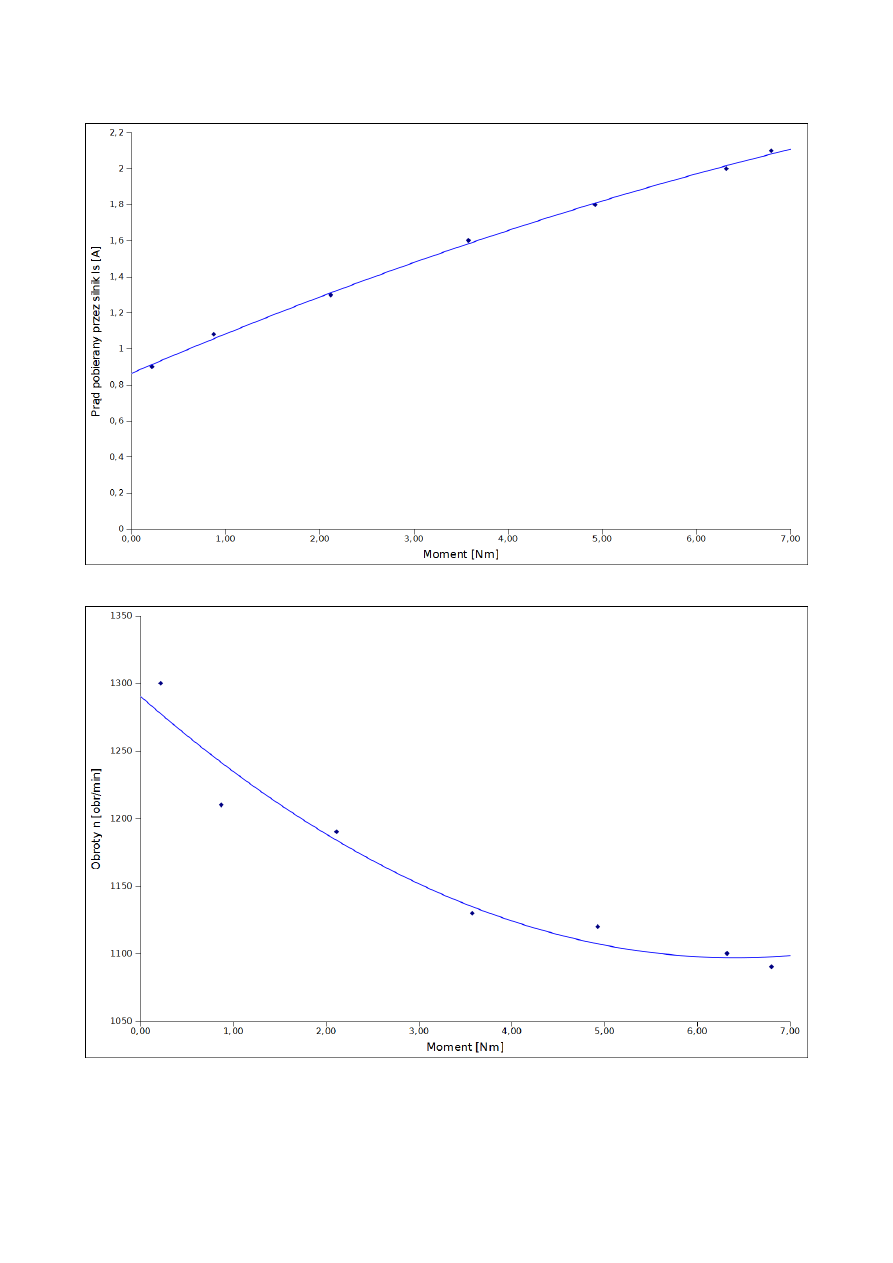
Is=F(M)
n=F(M)
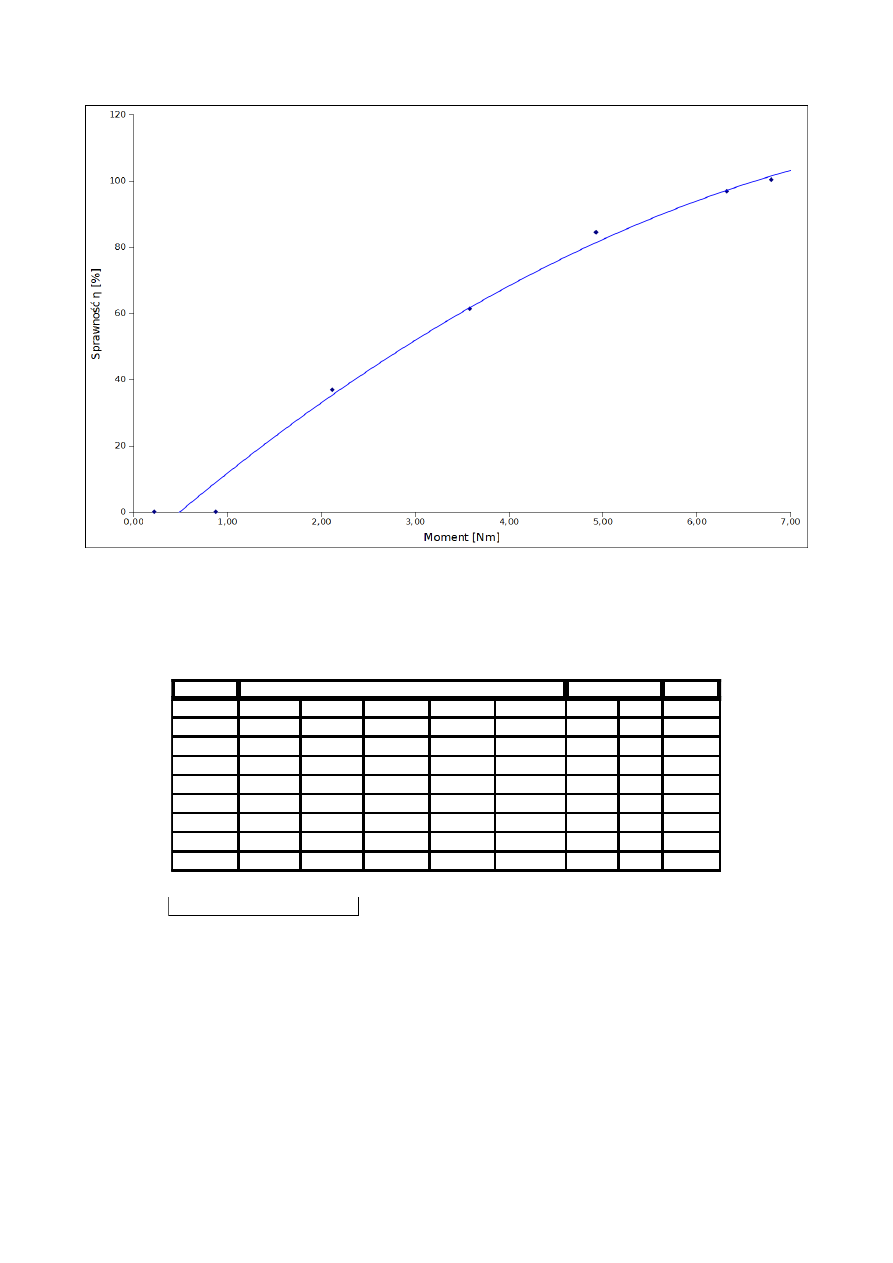
η=F(M)
Wyznaczenie charakterystyki regulacyjnej Ifs=F(M) przy stałych obrotach
Ponownie odczytuje straty w żelazie i zapisuje w tabeli jako Pfe, następnie obliczam P2 i M z
wzorów takich jak w poprzednim podpunkcie. Na podstawie otrzymanych wartości wykreślam
zależność prądu wzbudzenia silnika i momentu, przy zadanej stałej wartości prędkości obrotowej
n=1250 obr/min. Tak jak w przypadku poprzednich wykresów, dopasowuję krzywe teoretyczne.
#
Pomiary
Obliczenia
Straty
I3=Io
I2=Ifs
I4=Ifp
U3=Uo
U4=Ufp
P2
M
Pfe
A
A
A
V
V
W
Nm
W
1
0
0,58
0
0
0
30
0,23
0
2
0
0,42
0,46
250
164
108,44 0,83
3
3
0,7
0,38
0,45
240
160
277,21 2,11
2,8
4
1,4
0,35
0,43
236
152
446,15 3,40
2,75
5
2,1
0,32
0,41
224
144
601,73 4,58
2,6
6
2,8
0,29
0,39
220
140
773,66 5,89
2,5
7
3
0,28
0,39
220
140
828,1 6,31
2,5
n
1250 obr/min
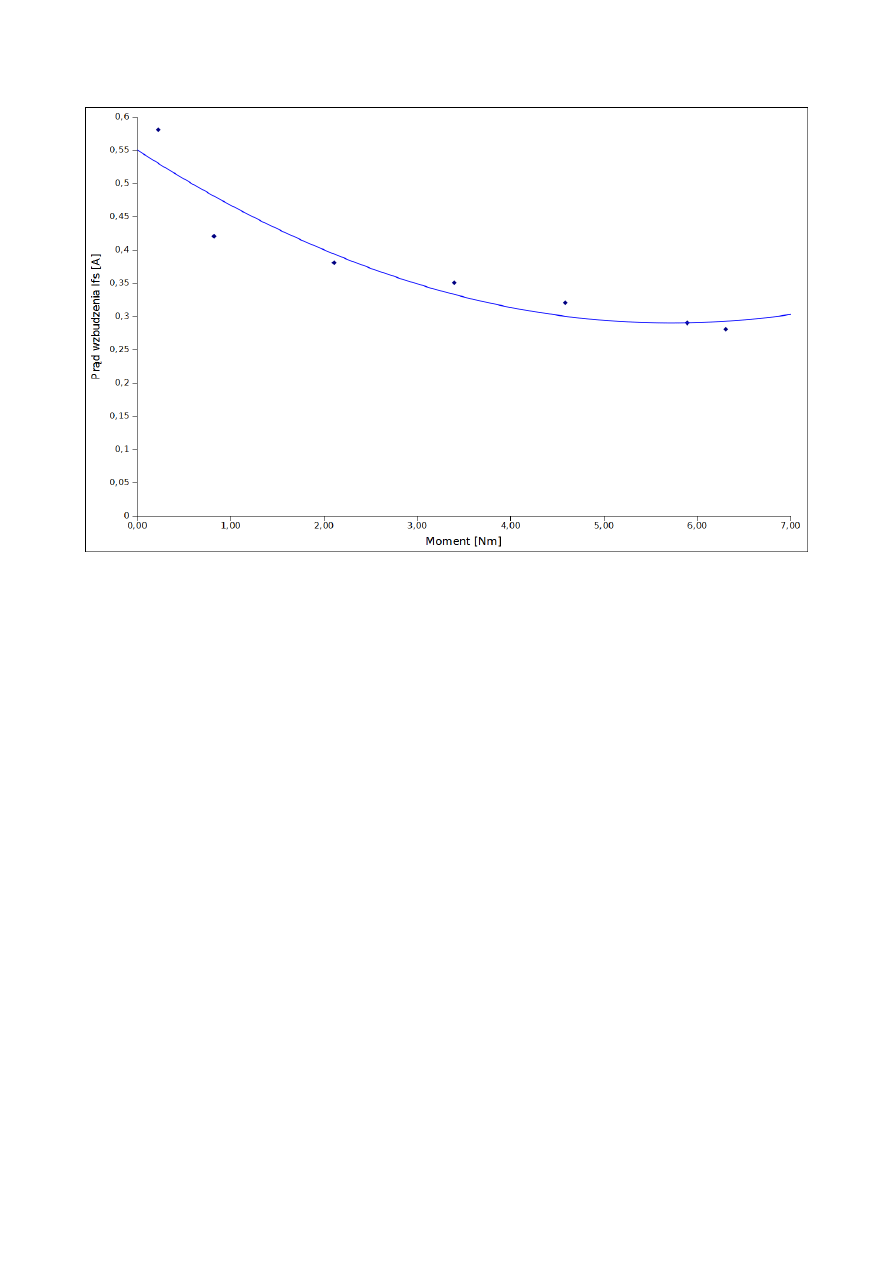
Ifs=F(M)
Wnioski
Dzięki wykonaniu pierwszej serii pomiarowej możliwe było zaobserwowanie jednego z
wydajniejszych sposobów regulacji prędkości obrotowej silnika DC, poprzez zmianę strumienia
wzbudzającego dzięki zastosowaniu regulowanego opornika w obwodzie wzbudzającym.
Z kolejnych serii pomiarowych, można zauważyć iż charakterystyki mechaniczne silnika DC są
nieliniowe, zapotrzebowanie na prąd rośnie wolniej niż uzyskiwany moment. Przy ~80%
sprawności uzyskujemy niemal maksymalny moment.
Dodatkowo analiza mocy i strat w stali pozwala stwierdzić iż, owe straty w porównaniu do mocy
silnika są niewielkie.
Wydział Samochodow i Maszyn Roboczych
Warszawa
08.12.2012
Zasada działania silnika DC
(wersja studencka)
Silnik elektryczny DC zbudowany jest z parzystej liczby biegunów (par), zwróconych do siebie
biegunami przeciwnymi (N do S), po to aby pomiędzy nimi było pole magnetyczne – to jest stojan
czyli magneśnica. Pomiędzy magnesami znajduje się twornik (wirnik), ułożyskowany tak aby mógł
się swobodnie obracać wokół własnej osi. Najprostszym twornikiem może być pojedynczy
przewodnik wygięty w ramę którego dwa końce przyłączone są do komutatora. Komutator to
pierścień zbudowany z warstw; cienkie blachy izolowane dielektrykiem (równie cienkim). Końce
przewodnika (ramki), są przyłączone do naprzeciwległych blaszek, komutator jest integralną
częścią twornika, a więc obraca się jak cały wirnik. Nieruchome szczotki doprowadzają prąd do
blaszek czyli do owej ramki. W silnikach używanych powszechnie, liczba ramek
(przewodników/uzwojeń) jest większa od 1 tak aby przy obrocie twornika kolejne ramki mogły być
zasilane gdyż :
Na ramkę, (przewodnik/uzwojenie) w którym płynie prąd elektryczny znajdujący się w polu
magnetycznym, działa para sił elektrodynamicznych. Siły te powodują powstanie momentu
obrotowego, a zatem ramka wychyla się z położenia równowagi.
W przypadku pojedynczej ramki, ramka wychylając się z położenia poziomego, obraca się do
położenia pionowego, jako obiekt obdarzony masą posiada bezwładność, dzięki której mija
położenie pionowe (w pionie mom. Obr = 0, bo prąd płynie idealnie prostopadle do linii pola
magnetycznego), szczotki zaczynają znów zasilać ramkę, ale prąd płynie w przeciwnym kierunku,
w końcu ramka obróciła się o 180 stopni, dzięki temu ramka znów zaczyna się obracać w tym
samym kierunku i tak do póty dopóki "nie skończy się prąd." Oczywiście w przeciętnym silniku DC
tych ramek jest dużo, a więc kiedy jedna ramka zostaje "odłączona" od zasilania, prąd płynie przez
następną i zjawisko "wypychania uzwojeń" nabiera charakteru ciągłego, dzięki czemu silnik staje
się wydajny.
Siła elektrodynamiczna (magnetyczna) - siła, z jaką działa pole magnetyczne na przewód
elektryczny, w którym płynie prąd elektryczny.
Na umieszczony w polu magnetycznym o indukcji magnetycznej B prostoliniowy przewodnik o
długości , przez który płynie prąd o natężeniu I, działa siła F, którą wektorowo określa wzór:
F=IlxB
czyli jej wartość wynosi:
F=BIl * sin α
Kąt α jest to kąt między kierunkiem przepływu prądu a kierunkiem linii pola. Kierunek siły jest
prostopadły do linii pola magnetycznego i przewodu. Zwrot siły określa reguła lewej dłoni.
Reguła lewej dłoni, reguła Fleminga – reguła określająca kierunek i zwrot wektora siły
magnetycznej (elektrodynamicznej).
Jeżeli lewą dłoń ustawi się tak, aby linie pola magnetycznego zwrócone były prostopadle ku
wewnętrznej powierzchni dłoni (aby wnikały w wewnętrzną stronę dłoni), a wszystkie palce - z
wyjątkiem kciuka - wskazywały kierunek i zwrot płynącego prądu (poruszającej się cząsteczki o
ładunku dodatnim), to odchylony kciuk wskaże kierunek i zwrot siły elektrodynamicznej działającej
na dodatni ładunek elektryczny umieszczony w tym polu (dla ładunku ujemnego zwrot siły będzie
przeciwny).
Zależność prędkości obrotowej silnika od prądu wzbudzenia If
(wersja studencka)
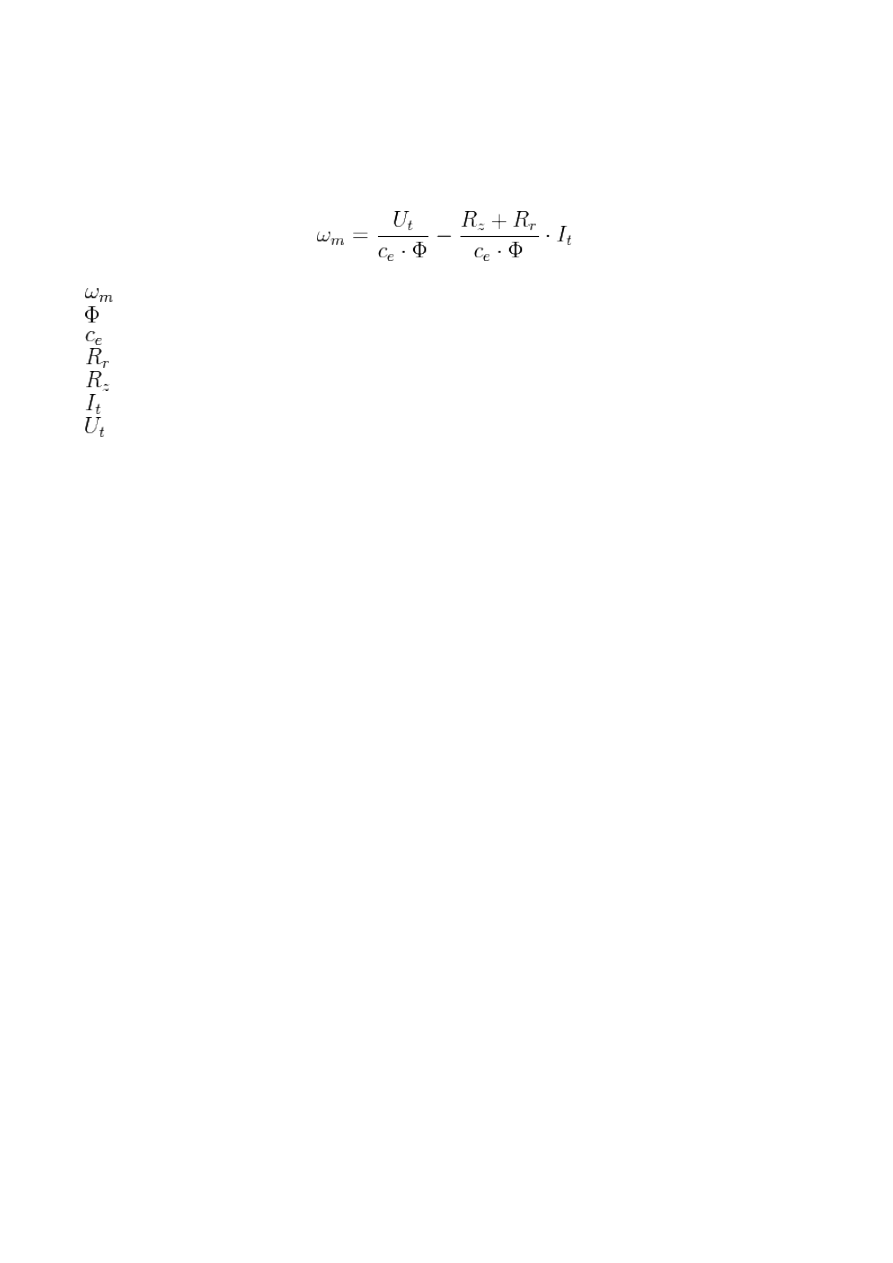
Wersja 1
-Prędkość kątowa z jaką wiruje twornik
-Strumień magnetyczny wytwarzany przez elektromagnesy
- Stała wynikająca z konstrukcji silnika
-Rezystancja regulacyjna
-Rezystancja zastępcza układu
-Prąd twornika
-Napięcie twornika
Wzór określa zależność między prędkością obrotową wirnika (silnika) a parametrami od której
zależy. Wzór ten można przekształcić do postaci :
ω
m
= ( U
t
- ( R
z
+ R
r
) * I
t
) / (c
e
* Φ)
A zatem, im większe napięcie twornika i mniejsze rezystancje, natężenie prądu twornika, stała
konstrukcyjna i strumień, tym większa prędkość. Prąd twornika ma charakter multiplikatywny, a
więc zmniejszenie prądu twornika ma największy wpływ na zwiększenie prędkości.
Wydział Samochodow i Maszyn Roboczych
Warszawa
18.12.2012
Wyszukiwarka
Podobne podstrony:
Badanie maszyn pradu stalego
27 Uruchamianie i badanie maszyn prądu stałego
badanie maszyn prądu stałego
maszyny pradu stalego nasze właściwe, Sprawka, silniki
Badanie silnika obcowzbudnego prądu stałego, SILNIKI ELEKTRYCZNE, Napęd elektryczny
03 Badanie obwodow pradu staleg Nieznany (2)
maszyny prądu stałego maszyny specjalne
Badanie obwodow pradu stalego i Nieznany
INSTRUKCJA Badanie obwodow pradu stalego
Maszyny prądu stałego
Sprawozdanie Badanie obwodów prądu stałego zawierającego elementy liniowe i nieliniowe (Moje)x
Maszyny pradu stalego
głogowski,elektrotechnika, MASZYNY PRĄDU STAŁEGO
Maszyny Prądu Stałego
Maszyny prądu stałego111moje
Maszyny prądu stałego, 2
O Maszyna Prądu Stałego
więcej podobnych podstron