
Podstawy Robotyki
Sprawozdanie
Kinematyka odwrotna
Krzysztof Gruba
grupa 23
rok IID
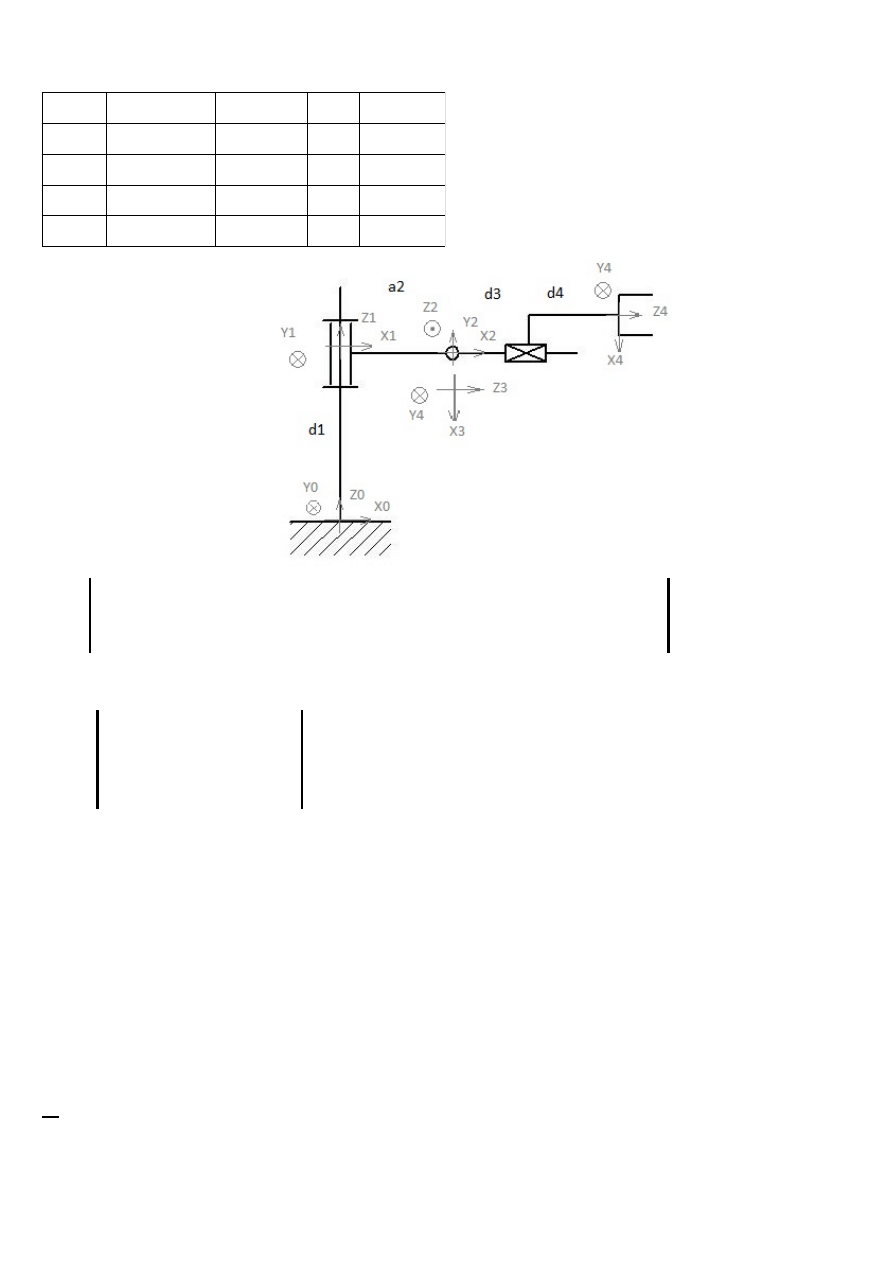
1)
układ
θ
i
d
i
a
i
α
i
1
0
d
1
0
0
2
Θ
2 VAR
0
a
2
90
o
3
Θ
3 VAR
-90
o
0
0
-90
o
4
0
d
3 VAR
+d
4
0
0
d
1
= 400
Θ
2
= 30
o
a
2
= 200
Θ
3
= 60
o
d
3
= 250
d
4
=150
T
7,0
=
Po podstawieniu danych:
T
7,0
=
Współrzędne wynoszą:
x = 346,4
y = 200
z = 746,4
Równania kinematyki odwrotnej mają postać:
-cos(θ
2
)sin(θ
3
-90
0
)(d
3
+150) + 200cos(θ
2
) = 356,4
-sin(θ
2
)sin(θ
3
-90
0
)(d
3
+150) + 200sin(θ
2
) = 200
400 + cos(θ
3
-90
0
)(d
3
+150) = 746,4
Rozwiązując układ równań za pomocą programu Maple otrzymuje się 4 rozwiązania:
1)
d
3
= 249,99 mm
θ
2
= 29,8
0
θ
3
= -29,8
0
0,75 -0,5 0,43 346,4
0,43 0,866 0,25 200
-0,5
0
0,87 746,4
0
0
0
1
cosθ2cos(θ3-90)
-sinθ2
sinθ2cos(θ3-90)
cosθ2
sin(θ3-90)
0
0
0
0
1
-cosθ2sin(θ3-90) -cosθ2sin(θ3-90)(d3+d4) + a2cosθ2
-sinθ2sin(θ3-90)
-sinθ2sin(θ3-90)(d3+d4) + a2sinθ2
cos(θ3-90)
cos(θ3-90)(d3+d4) + d1
2)
d
3
= -549,99 mm
θ
2
= 29,8
0
θ
3
= 240,1
0
3)
d
3
= 542,8 mm
θ
2
= -150,1
0
θ
3
= 147,3
0
4)
d
3
= -842,8 mm
θ
2
= -150,1
0
θ
3
= 210,3
0
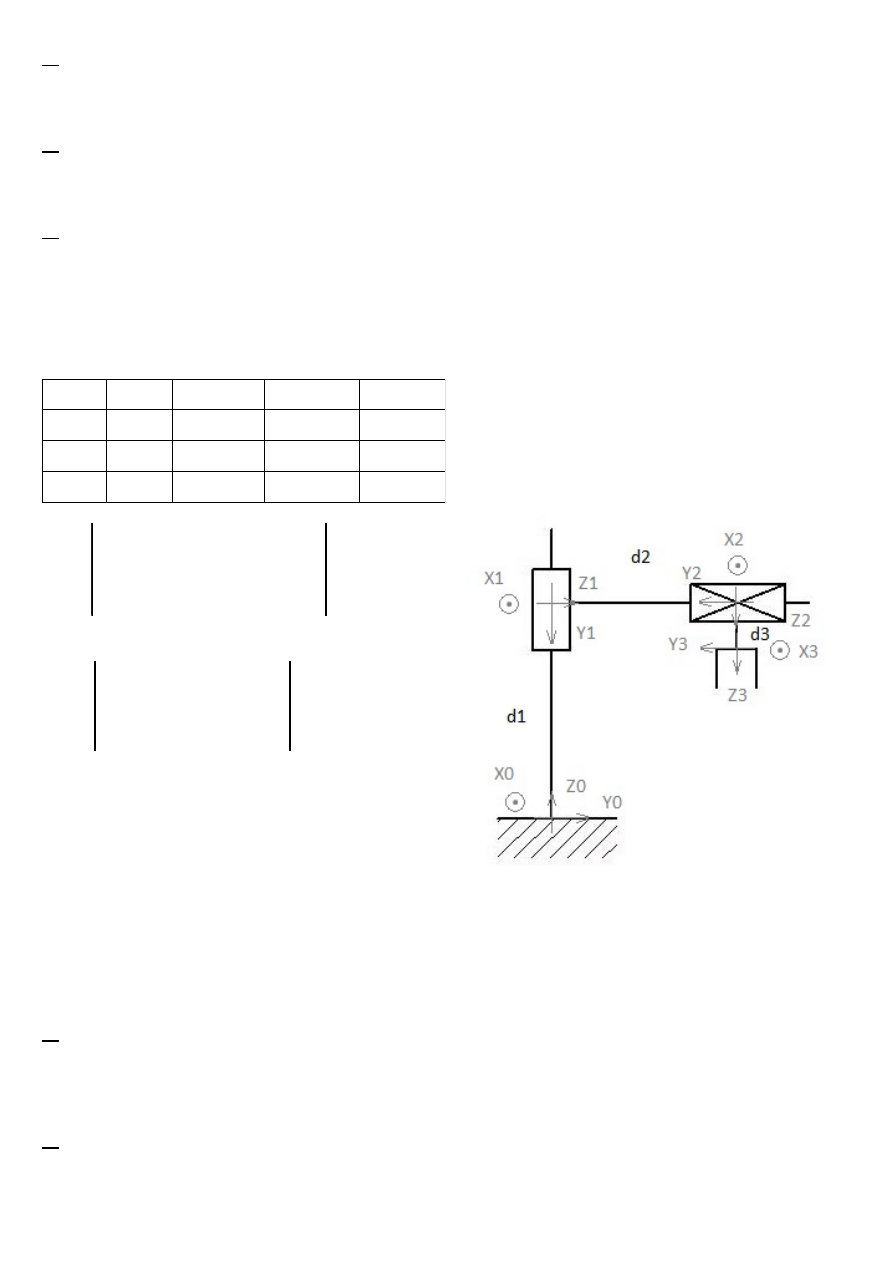
2)
układ
θ
i
d
i
a
i
α
i
1
Θ
1 VAR
d
1 VAR
0
-90
o
2
0
d
2 VAR
0
-90
o
3
0
d
3
0
0
Θ
1
= 30
o
d
1
= 150
d
2
= 200
d
3
= 50
T
6,0
=
Po podstawieniu danych:
T
6,0
=
Współrzędne wynoszą:
x = -100
y = 173,2
z = 100
Równania kinematyki odwrotnej mają postać:
-sin(θ
1
)d
2
= -100
cos(θ
1
)d
2
= 173,2
-50 + d
1
= 100
Rozwiązując układ równań za pomocą programu Maple otrzymuje się 2 rozwiązania:
1)
d
1
= 150 mm
d
2
= 199,99 mm
θ
1
= 29,8
0
2)
d
1
= 150 mm
d
2
= -199,99
θ
1
= -150,1
0
0,87
0,5
0
-100
0,5
-0,87 0 173,2
0
0
-1
100
0
0
0
1
cosθ1
sinθ1
0 -d2sinθ1
sinθ1 -cosθ1 0 d2cosθ1
0
0
-1 -d3+d1
0
0
0
1
Wyszukiwarka
Podobne podstrony:
Podstawy Robotyki lab3 id 36832 Nieznany
Podstawy Robotyki lab3 id 36832 Nieznany
Podstawy logistyki wyk 3 id 367 Nieznany
Podstawy teologii Cz05 id 36844 Nieznany
Podstawy Finansow egz id 367161 Nieznany
lab4(1) 3 id 259842 Nieznany
Instrukcja Lab4 id 216877 Nieznany
podstawy statystyki wzory id 36 Nieznany
podstawy chemii wyklad07 id 366 Nieznany
3 podstawowe operacje cd id 339 Nieznany (2)
Podstawy teologii Cz15 id 36845 Nieznany
Podstawy psychiatrii II id 3681 Nieznany
podstawy chemii kwantowej id 36 Nieznany
podstawy chemii wyklad10 id 366 Nieznany
Podstawy teologii Cz06 id 36844 Nieznany
podstawy chemii wyklad12 id 366 Nieznany
Cw 1 podstawyPP 14 15 id 97548 Nieznany
Podstawy jezyka Java id 367418 Nieznany
więcej podobnych podstron