
POLITECHNIKA BIAŁOSTOCKA
WYDZIAŁ ELEKTRYCZNY
KATEDRA ENERGOELEKTRONIKI I NAPĘDÓW ELEKTRYCZNYCH
Instrukcja do zajęć laboratoryjnych dla studentów
WYDZIAŁU MECHANICZNEGO
Studiów stacjonarnych i niestacjonarnych
z przedmiotów
PODSTAWY ELEKTROTECHNIKI I ELEKTRONIKI
Kody przedmiotów: MKBMS02011, MKBMN01002
ELEKTROTECHNIKA I ELEKTRONIKA
Kody przedmiotów: MKARS02010; MKIBS02015; MKTRS02011; MKETS02014;
MKARN02010; MKIBN02018; MKTRN03018.
ĆWICZENIE 5M
BADANIE PROSTOWNIKÓW STEROWANYCH
Opracował
mgr inż. Rafał Grodzki
BIAŁYSTOK 2013

2
Instrukcja jest własnością Katedry Energoelektroniki i Napędów Elektrycznych.
Do użytku wewnętrznego katedry.
Powielanie i rozpowszechnianie zabronione

3
Ogólne zasady bezpieczeństwa
Przed przystąpieniem do zajęć należy zapoznać się z instrukcją dydaktyczną do stanowiska
laboratoryjnego.
Dokonać oględzin urządzeń i przyrządów używanych w ćwiczeniu, a o zauważonych
nieprawidłowościach bezzwłocznie powiadomić prowadzącego.
Zabrania się samodzielnego załączania stanowiska bez zgody prowadzącego.
Zmian nastaw parametrów lub konfiguracji, możliwych przy użyciu dostępnych manipulatorów
(potencjometrów, przełączników), należy dokonywać po przeanalizowaniu skutków takich
działań.
Zmian konfiguracji obwodów elektrycznych, możliwych jedynie poprzez zmiany połączeń
przewodów, należy dokonywać za zgodą prowadzącego po uprzednim wyłączeniu zasilania
stanowiska.
W przypadku załączania układów napędowych należy zachować odpowiednią kolejność
czynności.
Po załączeniu stanowiska wykonywanie przełączeń (np. wymiana przyrządu) w układzie
znajdującym się pod napięciem jest niedozwolone.
W w/w stanowisku dostępne są części czynne obwodu elektrycznego o napięciu przekraczającym
napięcie bezpieczne, dlatego przed uruchomieniem należy zachować odpowiednie oddalenie od
tych części czynnych w celu uniknięcia porażenia prądem elektrycznym.
Stosowanie sposobów sterowania, ustawień lub procedur innych niż opisane w instrukcji może
spowodować nieprzewidziane zachowanie obiektu sterowanego a nawet uszkodzenie stanowiska.
Nie należy podłączać urządzeń nie przeznaczonych do współpracy z tym stanowiskiem
laboratoryjnym.
Przekroczenie dopuszczalnych parametrów prądów, napięć sygnałów sterujących może
doprowadzić do przegrzania się niektórych podzespołów, pożaru lub porażenia prądem.
W przypadku pojawienia się symptomów nieprawidłowego działania (np. swąd spalenizny)
natychmiast należy wyłączyć stanowisko i odłączyć przewód zasilający.
Demontaż osłon stanowiska oraz wszelkie naprawy i czynności serwisowe, oprócz opisanych
w instrukcji, powinny być wykonywane przez wykwalifikowany personel po wyłączeniu
stanowiska.
Należy stosować tylko bezpieczniki o parametrach nominalnych podanych w instrukcji lub na
obudowie urządzenia.
Urządzenie powinno być czyszczone przy użyciu suchej i miękkiej szmatki. Nie należy stosować
do tych celów rozpuszczalników.
Podczas korzystania z aparatury laboratoryjnej (oscyloskopy, generatory, zasilacze itp.) należy
przestrzegać ogólnych zasad bezpieczeństwa tj.:
Do zasilania przyrządu należy stosować tylko kable zalecane do danego wyrobu.
Nie należy podłączać lub odłączać sond i przewodów pomiarowych, gdy są one dołączone
do źródła napięcia.
Przyrząd powinien być połączony z uziemieniem przez przewód ochronny w kablu zasilającym.
Aby uniknąć porażenia przewód ten powinien być podłączony do przewodu ochronnego sieci.
Przewód uziemiający sondy należy podłączać tylko do uziemienia ochronnego. Nie należy
podłączać go do punktów o wyższym potencjale.
Aby uniknąć porażenia prądem podczas używania sondy, należy trzymać palce nad
pierścieniem zabezpieczającym. Nie wolno dotykać metalowych części grotu, gdy sonda jest
podłączona do źródła napięcia
Nie dotykać końcówek przewodów łączeniowych w trakcie wykonywania pomiarów.
4
I. WPROWADZENIE
Wiadomości niezbędne do realizacji ćwiczenia:
1. Budowa tyrystora
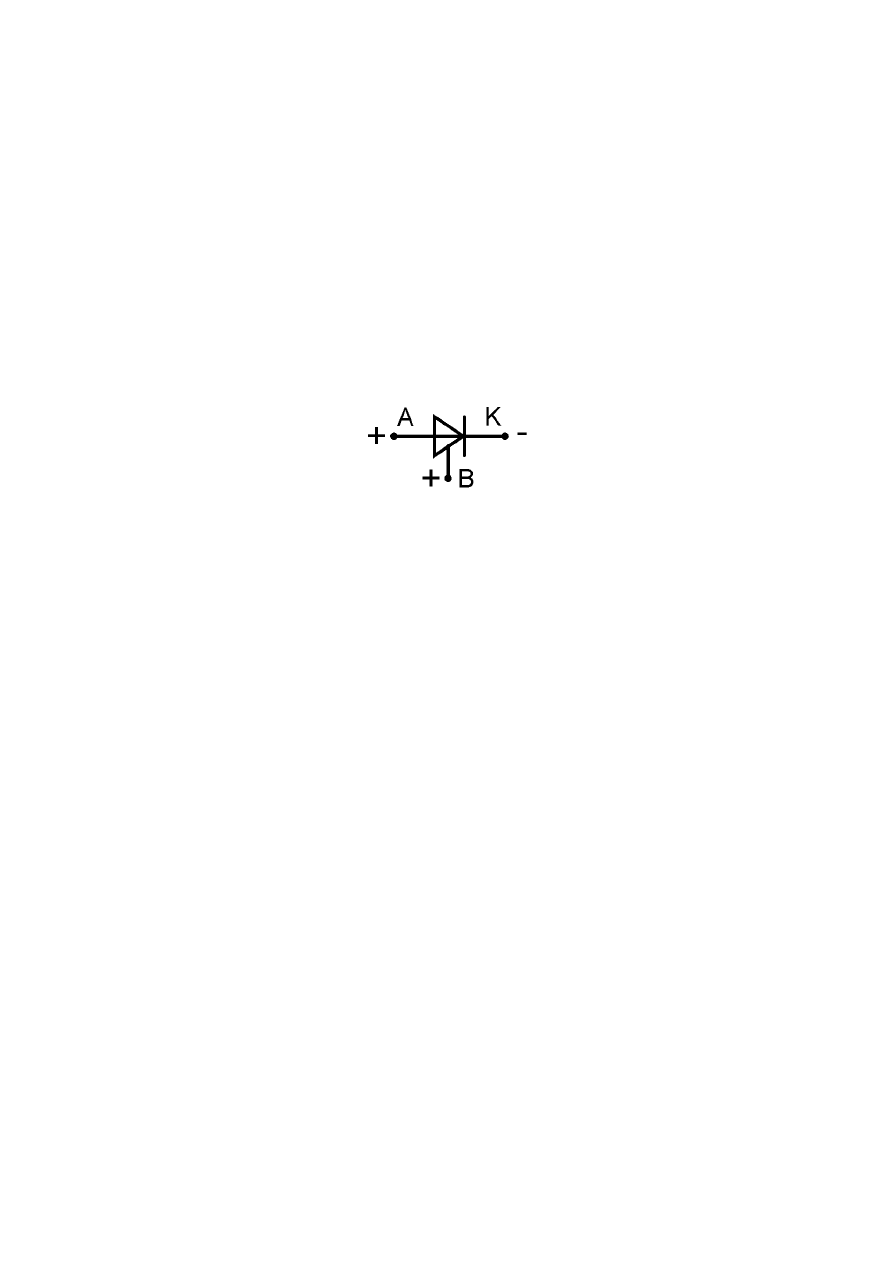
Tyrystor jako element składa się z czterech warstw przewodnikowych
p-n-p-n, na zewnątrz ma wyprowadzone trzy elektrody: A – anoda, K – katoda,
B – bramka. Symbol graficzny oraz polaryzacja poszczególnych elektrod
przedstawiona jest na rysunku 1.
Rys. 1. Tyrystor – symbol graficzny i schemat włączenia : A – anoda, K –
katoda, B – bramka
Przedstawiony na rys. 1 schemat polaryzacji włączenia i charakterystyka
tyrystora wskazują, że zacznie on przewodzić, jeśli do anody zostanie
przyłączone dodatnie napięcie względem katody, zaś do złącza bramka katoda
zostanie doprowadzony dodatni impuls sterujący. Gdy do bramki nie jest
doprowadzone napięcie tyrystor praktycznie nie przewodzi prądu, niezależnie
od kierunku polaryzacji elektrod anoda – katoda. Płynie przez niego tylko
niewielki prąd wsteczny (I
w
).
Po wysterowaniu tyrystora spadek napięcia w obwodzie anoda-katoda
w kierunku przewodzenia wynosi 2
3V.
Tyrystor traci zdolność przewodzenia prądu i przechodzi w stan blokowania,
gdy prąd w kierunku przewodzenia osiągnie wartość mniejszą od wartości
charakterystycznej – prądu podtrzymania.
Tyrystor włączony w obwód napięcia przemiennego może być
wyzwolony (wysterowany) w czasie trwania półokresów dodatnich napięcia na
anodzie. Przy przejściu napięcia od wartości dodatnich do ujemnych tyrystor
5
osiąga stan zaporowy. Ponowne pojawienie się napięcia dodatniego na anodzie
stwarza warunki do następnego wyzwolenia tyrystora za pomocą impulsu
bramkowego (rys. 3b).
2. Charakterystyki prądowo – napięciowe tyrystora
3. Układy prostowników sterowanych
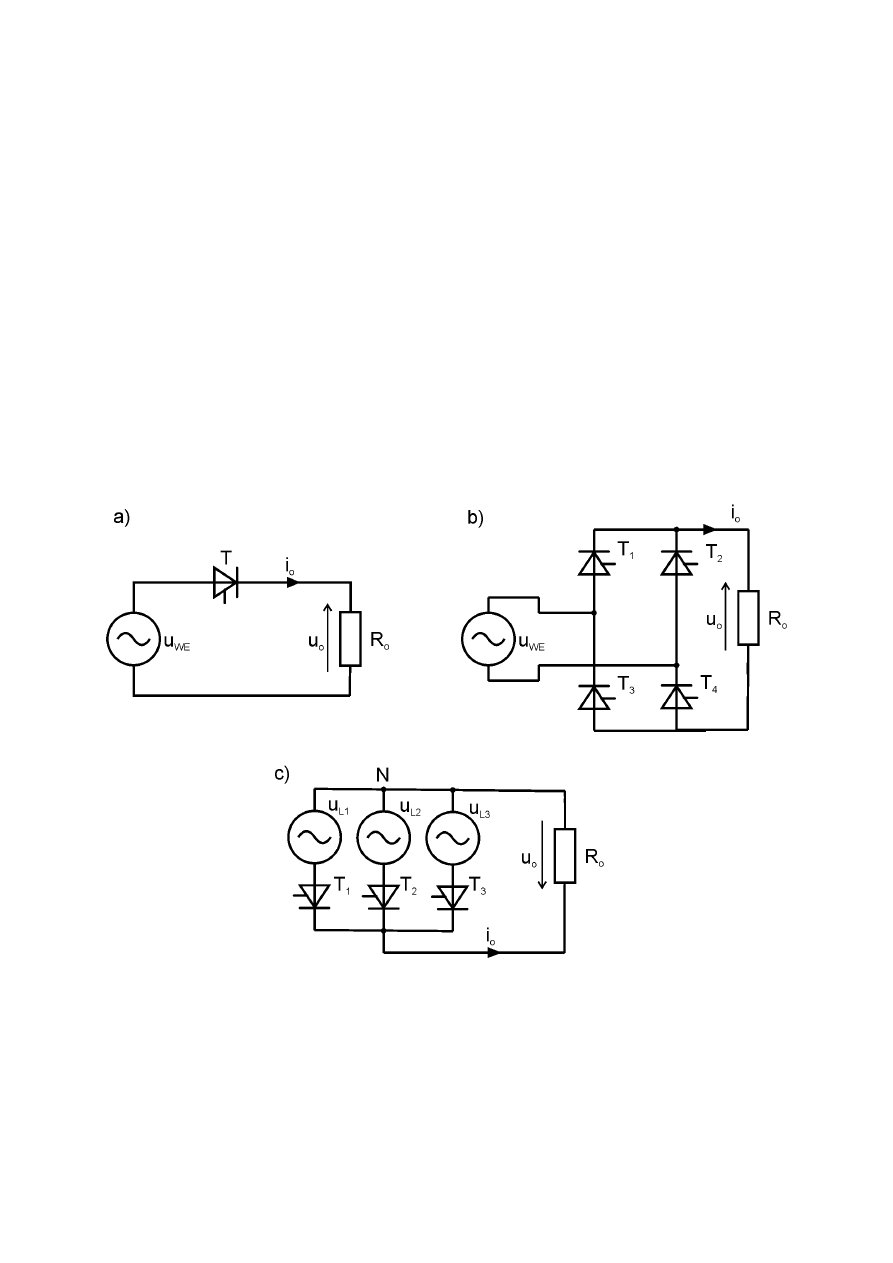
Prostownik sterowany może być traktowany jako źródło napięcia stałego
o regulowanej wartości. Źródła takie stosowane są do sterowania mocy
dostarczanej do odbiornika, którym może być silnik prądu stałego. Podstawowe
układy tyrystorowych prostowników sterowanych są pokazane na rysunku 2.
Rys. 2. Układy prostowników sterowanych: a) jednofazowy jednopulsowy;
b) jednofazowy mostkowy; c) trójfazowy trójpulsowy z punktem
zerowym
6
4. Wartości średnie napięcia odbiorników zasilanych z prostowników
sterowanych.
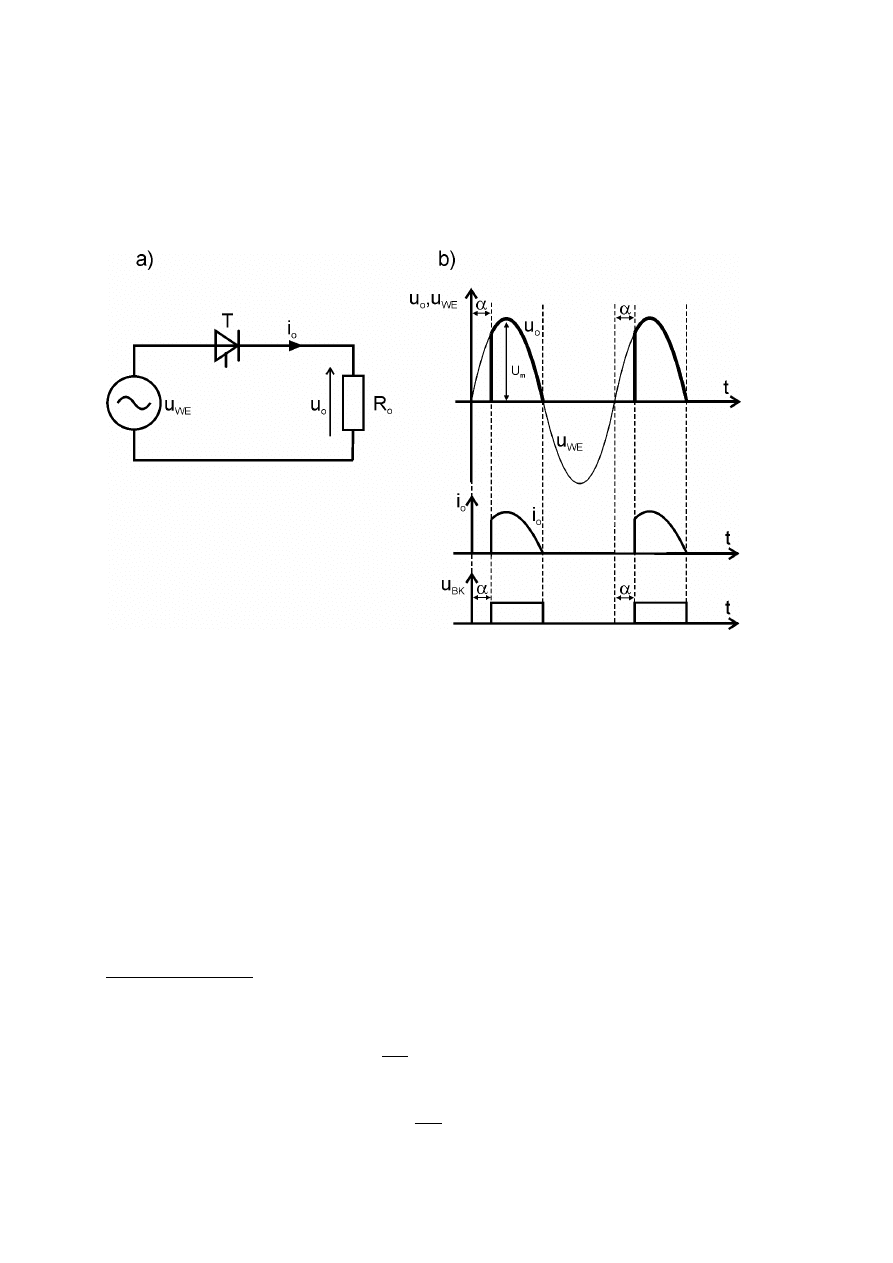
a) prostownik jednofazowy jednopołówkowy z odbiornikiem rezystancyjnym.
Rys. 3. Prostownik jednofazowy jednopołówkowy: a) schemat obwodu
b) przebiegi czasowe prądu i napięcia na odbiorniku rezystancyjnym
Na rysunku 3b) przedstawiono ideę sterowania prostownikiem
tyrystorowym. Przy dodatniej połówce napięcia zasilającego u
WE
na bramkę
tyrystora podawany jest impuls sterujący u
BK
. Dopiero jego pojawienie się
sprawia, że tyrystor zaczyna przewodzić prąd. Regulując kąt α w granicach od 0
do π można zmieniać wartość napięcia stałego na wyjściu prostownika.
Mówiąc o napięciu wyjściowym prostowników posługujemy się pojęciem
wartości średniej napięcia mierzonej za jeden okres. W przypadku przebiegu
przedstawionego na rys. 3b wartość średnia dana jest wzorem:
)
(
)
sin(
2
1
t
d
t
U
U
m
śr
cos
1
2
m
śr
U
U
7
gdzie:
m
U
- amplituda napięcia zasilającego,
- kąt wysterowania prostownika.
Maksymalna wartość średnia napięcia na obciążeniu występuje dla
=0
i wynosi:
m
m
śr
U
U
U
)
1
1
(
2
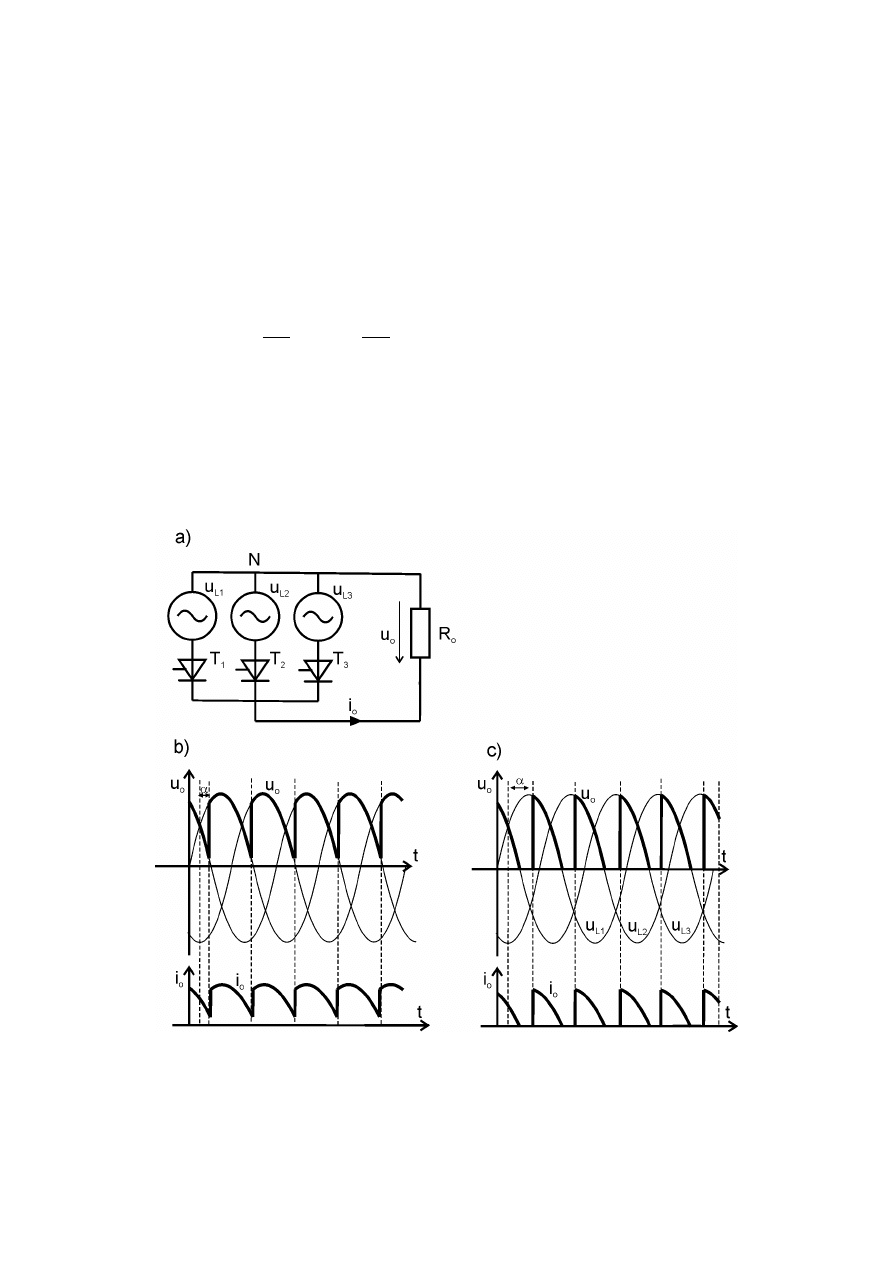
b) prostownik trójfazowy trójpulsowy z odbiornikiem rezystancyjnym:
gdy kąt
(kąt wysterowania prostownika) odmierzany jest od punktu
komutacji naturalnej.
Rys. 4. Prostownik trójfazowy trójpulsowy: schemat obwodu a) oraz przebiegi
czasowe prądu i napięcia na odbiorniku rezystancyjnym przy prądzie
nieciągłym b) oraz ciągłym c).
8
lub prąd odbiornika jest ciągły
Sytuację, kiedy prąd odbiornika rezystancyjnego jest ciągły
przedstawiono na rysunku 4b). Podobnie jak poprzednio, wartość średnią
napięcia U
śr
wyznacza się obliczając całkę za okres napięcia sieci zasilającej.
3
2
6
6
)
(
sin
2
3
t
d
t
U
U
m
śr
Ostateczna ogólna postać wzoru na wartość U
śr
dla prostownika q-pulsowego
przedstawia się następująco:
cos
sin
m
śr
U
q
π
q
U
gdzie: q – liczba pulsów prostownika. W danym przypadku, dla prostownika 3-
pulsowego q=3, napięcie U
śr
wynosi zatem:
cos
2
3
3
cos
3
sin
3
m
m
śr
U
U
U
6
5
6
i prąd odbiornika jest nieciągły:
Taki przypadek pokazano na rysunku 4c). Kiedy prąd odbiornika spadnie do
zera tyrystor danej fazy przechodzi w stan zaporowy. W tym przypadku
zależność na wartość średnią napięcia odbiornika dana jest następująco:
6
)
(
sin
2
3
t
d
t
U
U
m
śr
6
cos
1
2
3
m
śr
U
U
U
m
- amplituda fazowego napięcia zasilającego.

9
II. CEL I ZAKRES ĆWICZENIA LABORATORYJNEGO
Celem
ćwiczenia
jest
zapoznanie
studentów
z
układem
energoelektronicznym jakim jest prostownik sterowany. W ćwiczeniu studenci
realizują wersję prostownika sterowanego w układzie jednopulsowym dla
obciążenia rezystancyjnego oraz trójpulsowym z obciążenia RLE (silnik prądu
stałego). Badania laboratoryjne dotyczą zarówno samego prostownika
sterowanego, jak i zasilanego poprzez ten prostownik silnika obcowzbudnego
prądu stałego. Dla układu prostownika z silnikiem wyznaczana jest rodzina
charakterystyk mechanicznych, która obrazuję możliwość sterowania prędkości
kątowej wału silnika.
III. OPIS STANOWISKA LABORATORYJNEGO
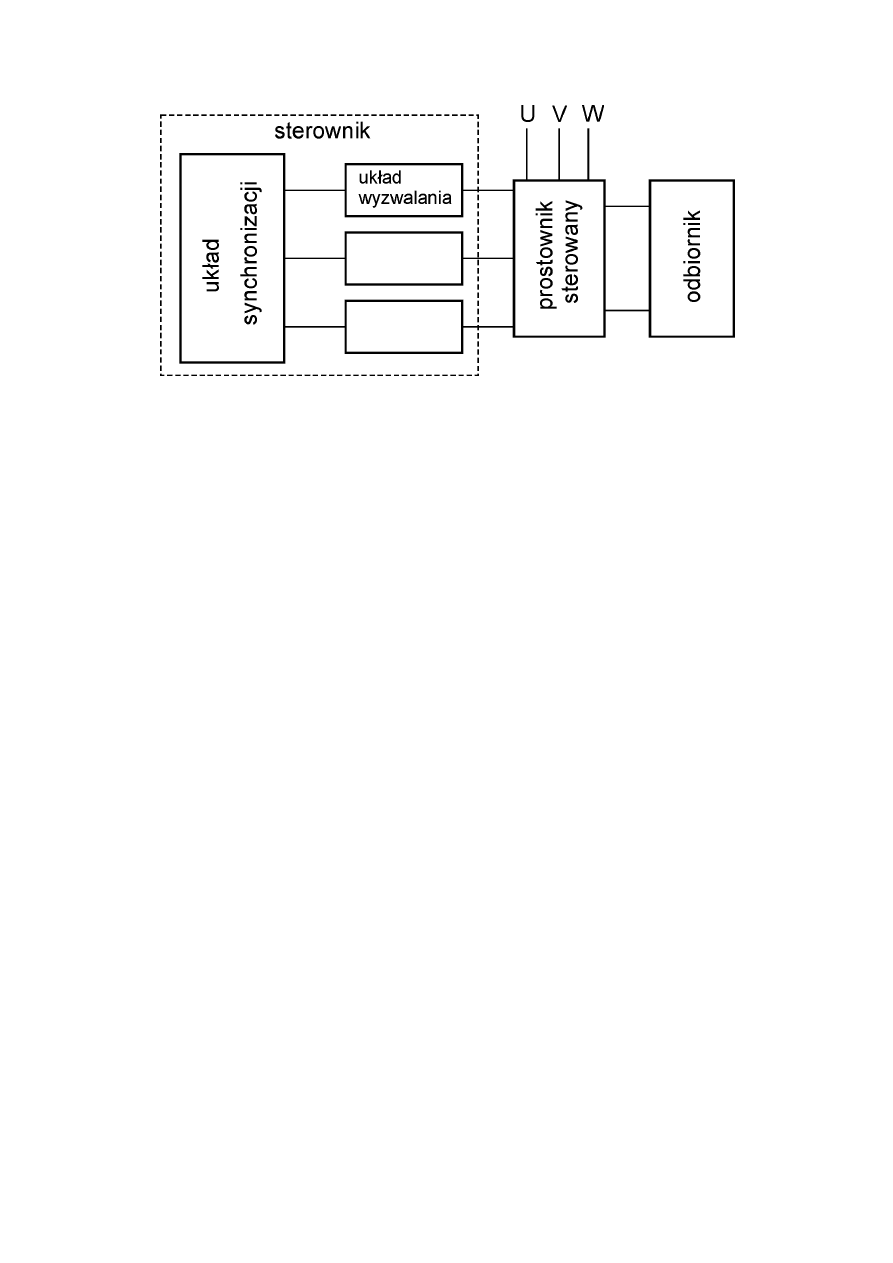
Do wyzwalania tyrystorów prostownika sterowanego służy układ
sterowania, którego schemat blokowy przedstawiony jest na rysunku 5.
Układ synchronizacji służy do wypracowania trzech sygnałów
zsynchronizowanych z poszczególnymi napięciami faz sieci trójfazowej,
zasilającej prostownik sterowany. Z sygnałów tych w układzie wyzwalania
uformowany jest impuls sterujący prostokątny o regulowanej szerokości.
Impulsem
tym
wysterowywana
jest bramka tyrystora dołączonego
do odpowiedniej fazy napięcia trójfazowej sieci zasilającej prostownik. Zmiana
szerokości impulsu powoduje zmianę kąta wysterowania
tyrystorów
prostownika i regulację wartości średniej napięcia wyjściowego.
Cały układ badawczy prostownika sterowanego zainstalowany jest
w obudowie o kształcie skrzynki. Do zacisków tylnej części obudowy należy
doprowadzić napięcie sieci trójfazowej 3x400V. Pozostałe, odpowiednio
oznaczone, zaciski tej części powinny być połączone z odpowiednimi zaciskami
silnika i hamownicy (obwód twornika i wzbudzenia) oraz prądniczki
tachometrycznej.
10
Rys. 5. Schemat blokowy sterowania układu laboratoryjnego
W ćwiczeniu zaciski płyty tylnej są przeważnie połączone, jednak należy
zawsze sprawdzić czy połączenie to jest właściwe. Przednią część pulpitu
stanowiska laboratoryjnego stanowi płyta czołowa, na której narysowany jest
cały obwód silnoprądowy badanego układu (rys. 6). Prostownik sterowany
stanowią trzy tyrystory połączone katodami, do których przyłączony jest z
jednej strony amperomierz tablicowy. Drugi zacisk amperomierza przyłączony
jest do zacisku łączeniowego. Między ten zacisk i zacisk zera sieci włącza się
obwód odbiornika, którym może być opornik regulowany włączony zewnętrznie
bądź silnik obcowzbudny prądu stałego. Zaciski twornika silnika również
wyprowadzone są na płytę czołową pulpitu i przyłączenia silnika dokonuje się
łącząc te zaciski z zaciskami wyjściowymi prostownika sterowanego.
Dodatkowo z prawej strony płyty czołowej wyprowadzone są zaciski twornika
hamownicy tj. obcowzbudnej prądnicy prądu stałego, sprzęgniętej mechanicznie
ze sterowanym silnikiem. Do zacisków tych należy przyłączyć opornik w celu
rozproszenia energii i wytworzenia momentu hamującego na wale silnika.
Dwa potencjometry zainstalowane w dolnej części pulpitu służą do
zadawania prądów wzbudzenia zarówno silnika jak i hamownicy.
Układ sterowania prostownika sterowanego narysowany jest na pulpicie
w postaci bloku prostokątnego, z którego do bramek poszczególnych tyrystorów
zaznaczone są trzy połączenia. Jedno połączenie jest na stałe, zaś pozostałe dwa

11
są tworzone poprzez wtyczki zwierające. Dzięki takiemu rozwiązaniu istnieje
możliwość wyboru konfiguracji prostownika odpowiednio jednopulsowej (obie
wtyczki wyłączone), dwupulsowej (jedna wtyczka włączona) i trójpulsowej
(dwie wtyczki włączone). Zmiany kąta wysterowania dokonuje się
potencjometrem umieszczonym w bloku sterowniczym na pulpicie. Pomiary
prądów
i
napięć dokonywane są odpowiednimi amperomierzami
i woltomierzami tablicowymi włączonymi w poszczególnych obwodach układu.
Pomiar prędkości dokonywany jest odpowiednio wyskalowanym woltomierzem
tablicowym umieszczonym na pulpicie stanowiska. Układ prostownika
sterowanego załączany jest stycznikiem, do którego załączania i wyłączania
służą przyciski sterownicze znajdujące się w lewej dolnej części płyty czołowej
pulpitu. Załączenie prostownika sygnalizowane jest świecącymi lampkami
umieszczonymi z lewej strony pulpitu na wejściu w trzech fazach zasilających
tyrystory.
Na tablicy czołowej wyprowadzone są też zaciski pomiarowe prądu i
napięcia prostownika, oznaczone jako I
pp
oraz U
pp
. Zaciski te umożliwiają
podgląd wartości chwilowych prądu i napięcia prostownika za pomocą
oscyloskopu cyfrowego. Skala pomiarowa jest następująca:
I
pp
– 10 A/V (1 V na oscyloskopie odpowiada prądowi 10A)
U
pp
– 100 V/V (1 V na oscyloskopie odpowiada napięciu 100V)
Uwaga!
Po załączeniu prostownika nie wolno na pulpicie układu
dokonywać żadnych przełączeń.
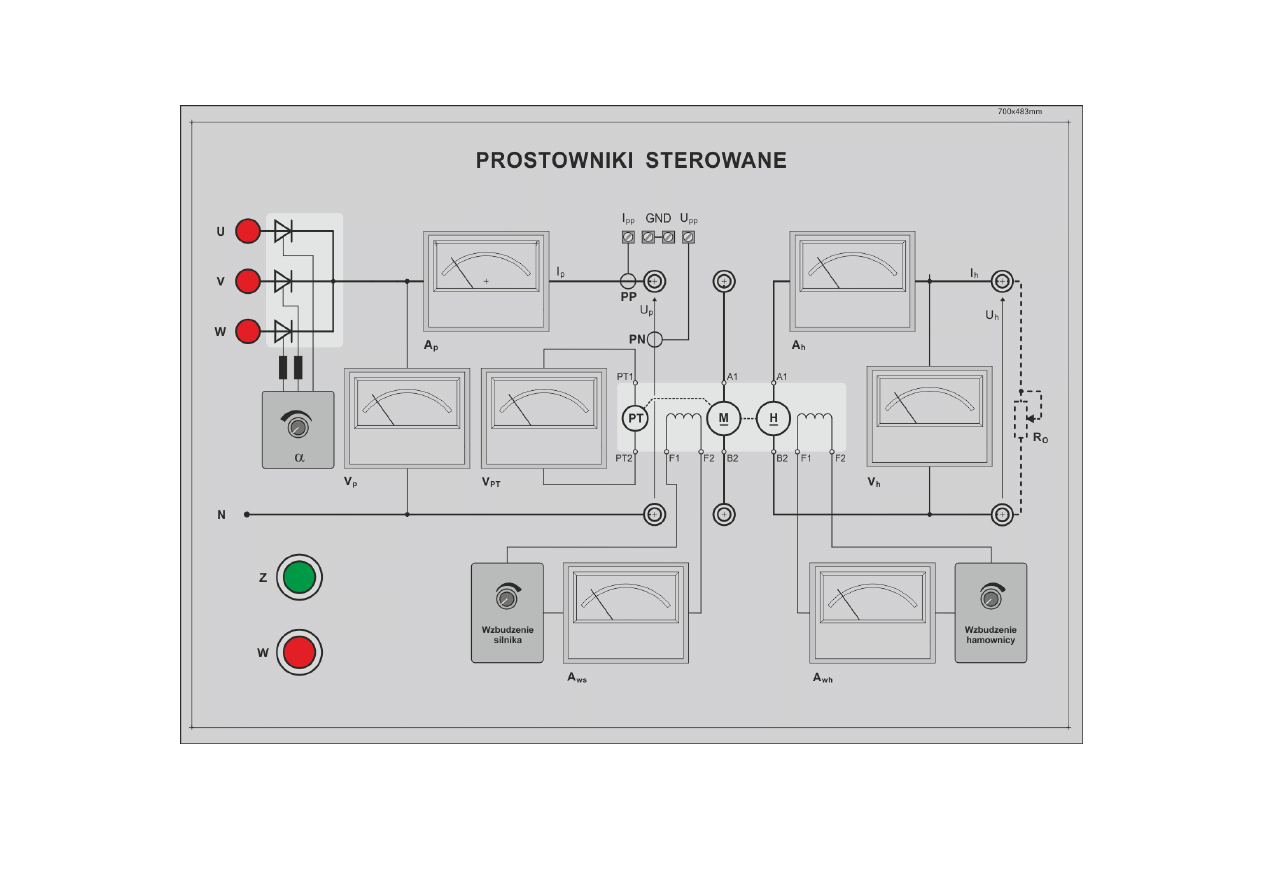
Rys. 6. Widok tablicy czołowej stanowiska laboratoryjnego
IV. PROGRAM ĆWICZENIA LABORAORYJNEGO
1. Uruchomienie układu laboratoryjnego
Przed włączeniem stycznika należy:
- połączyć zaciski sieci trójfazowej zgodnie z oznaczeniami L1, L2, L3,
N z odpowiednimi zaciskami na tylnej płycie układu laboratoryjnego,
- pozostałe zaciski na płycie czołowej i tylnej układu połączyć zgodnie
z oznaczeniami.
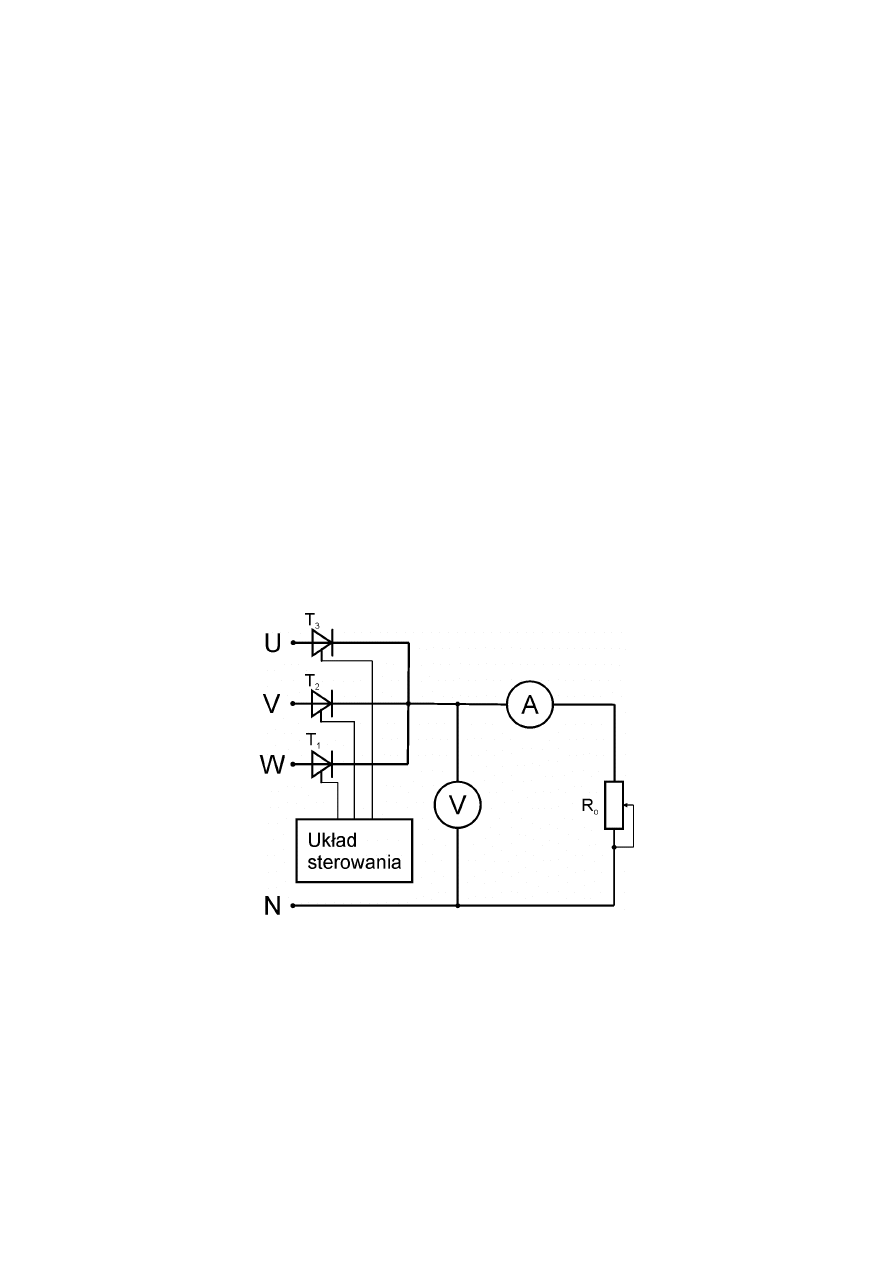
2. Badanie tyrystorowego prostownika sterowanego
Na rysunku 7 przedstawiony jest prostownik sterowany, który może być
badany w ćwiczeniu jako:
a) prostownik sterowany jednofazowy jednopulsowy,
b) prostownik sterowany jednofazowy dwupulsowy,
c) prostownik sterowany trójfazowy trójpulsowy.
Rys. 7. Schemat układu pomiarowego prostownika sterowanego trójpulsowego.
Kąt wyzwalania tyrystorów
jest regulowany przez układ wyzwalający.
W celu obciążenia prostownika należy przyłączyć do jego zacisków
wyjściowych na płycie czołowej rezystor R
obc
.
i regulować tak, aby prąd
oddawany przez prostownik zmieniał się od zera do wartości znamionowej przy
14
α=0. Nie należy przekraczać prądu 3A. W ćwiczeniu należy wyznaczyć
charakterystykę zewnętrzną prostownika U
p
= f(I
p
) przy α= const. dla dwóch
typów prostowników sterowanych:
a) prostownika sterowanego jednopulsowego
b) prostownika sterowanego trójpulsowego.
Wyniki pomiarów zapisujemy w tabeli 1.
Tabela 1.
Lp.
U
p
[V]
I
p
[A]
1.
2.
3.
4.
5.
6.
7.
8.
9.
Pomiary należy przeprowadzić dla dwóch wartości kąta wysterowania
1
i
2
(małej i dużej). Na podstawie pomiarów wykreślić charakterystyki zewnętrzne
prostowników. Obliczyć procentowy spadek napięcia przy obciążeniu
prostownika prądem znamionowym.
%
100
0
0
%
U
U
U
U
n
.
W czasie wykonywania pomiarów należy przeprowadzić obserwacje
przebiegów napięcia wyjściowego prostownika dla różnych kątów
wysterowania tyrystorów przy pomocy oscyloskopu cyfrowego i wyniki
obserwacji zamieścić w protokole. Obliczyć kąty wysterowania
1
i
2
.
Przeprowadzić dyskusję otrzymanych wyników.
15
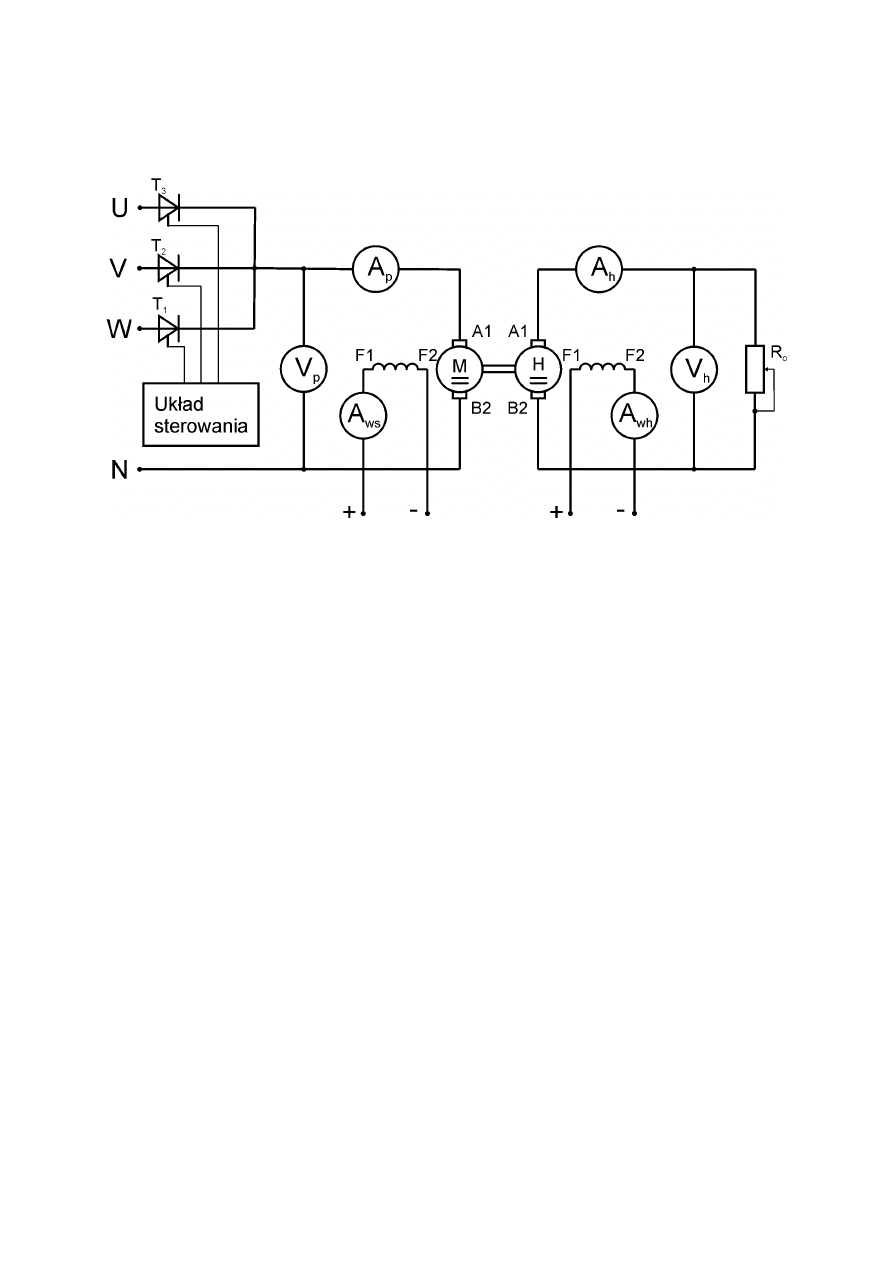
3. Badanie tyrystorowego układu napędowego
Układ badany przedstawiony jest na rysunku 8.
Rys. 8. Tyrystorowy układ napędowy – schemat układu pomiarowego.
3.1. Zapoznanie się z układem napędowym
Zapisać dane znamionowe silnika, prądnicy hamowniczej i prądniczki
tachometrycznej.
Twornik silnika obcowzbudnego M zasilany jest z prostownika
sterowanego. Uzwojenie wzbudzenia (F1, F2) tego silnika jest zasilane
z oddzielnego prostownika sterowanego. Regulacja prądu wzbudzenia
ws
I
wykonywana jest przy pomocy potencjometru umieszczonego na płycie
czołowej układu. Wartość prądu wzbudzenia wskazuje miernik umieszczony
nad potencjometrem. Jego wartość poda prowadzący ćwiczenia.
Silnik jest obciążony prądnicą obcowzbudną (hamownicą), w której regulacja
prądu wzbudzenia wykonywana jest za pomocą potencjometru znajdującego się
na płycie czołowej układu. Przed przyłączeniem układu do sieci należy nastawić
kąt wysterowania taki, aby napięcie twornika silnika U
t
= 0 (woltomierz V
p
),
(np. α= 180
o
). Rozruch przeprowadza się zmniejszając stopniowo kąt
16
wysterowania α (powodując zwiększenie
t
U
). Po dokonaniu rozruchu należy
wzbudzić hamownicę, a następnie stopniowo obciążać silnik.
3.2. Wyznaczanie charakterystyki sterowania tzn. zależności
)
U
(
f
t
albo
)
(
f
Regulując napięcie
t
U
przez zmianę kąta wysterowania
należy
wyznaczyć zależność prędkości kątowej silnika
od napięcia twornika silnika
t
U
. Pomiary należy przeprowadzić dla biegu jałowego silnika
)
I
I
(
0
t
oraz
dla obciążenia znamionowego (
n
t
I
I
). Wyniki pomiarów zapisać w tabeli 2.
Tabela 2.
Lp.
Pomiary
Obliczenia
U
t
I
t
U
PT
n
V
A
V
obr/min
rad/s
rad (
0
)
1.
2.
3.
4.
5.
6.
7.
8.
n=U
PT
·k, gdzie k=
V
obr min
/
9
.
13
,
30
n
)
Na podstawie pomiarów wykreślić zależności:
)
U
(
f
t
dla
0
t
I
I
i
n
t
I
I
.
Pomiary należy wykonać dla dwóch typów prostowników.
Za pomocą oscyloskopu należy zaobserwować przebieg napięcia twornika.
Zaobserwowane przebiegi dla różnych kątów wysterowania
zamieścić
w sprawozdaniu.
Przeprowadzić dyskusję dotyczącą otrzymanych wyników.
17
3.3. Wyznaczanie charakterystyk mechanicznych silnika.
Charakterystyki mechaniczne
)
M
(
f
silnika zasilanego z prostownika
sterowanego wyznaczamy w stanie obciążenia silnika prądnicą hamowniczą
przy stałej wartości kąta wysterowania
= const. Pomiary przeprowadzić dla
dwóch wartości
dobranych tak, aby napięcie twornika w stanie jałowym
silnika wynosiło U
t
= Un i np. U
t
= 0.8Un.
Wyniki pomiarów należy zapisać w tabeli 3.
Tabela 3.
Lp.
Pomiary
Obliczenia
U
t
I
t
U
h
I
h
U
PT
n
P
t
P
h
P
w
M
V
A
V
A
V
obr/min rad/s W
W
-
W
Nm
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
t
t
t
U
I
P
- moc pobierana przez silnik
h
h
h
U
I
P
- moc oddawana przez hamownicę.
Sprawność, przy założeniu jednakowej sprawności obu maszyn
t
h
P
P
.
Moc na wale silnika
t
w
P
P
[W].

18
Moment na wale
w
P
M
Na podstawie pomiarów należy wykreślić charakterystyki mechaniczne.
Sztywność charakterystyk obliczyć ze wzoru (dla wyznaczonych
charakterystyk):
%
100
%
0
n
0
n
- prędkość kątowa przy momencie M
n
.
Moment znamionowy silnika należy obliczyć na podstawie danych
znamionowych:
n
n
n
P
M
[Nm]
Pomiary należy wykonać dla dwóch typów prostowników.
W czasie wykonywania pomiarów przeprowadzić obserwacje za pomocą
oscyloskopu przebiegów napięcia i prądu twornika dla różnych wartości kątów
wysterowania
i zamieścić oscylogramy w sprawozdaniu.
Przeprowadzić dyskusję wyników.
V. WYMAGANIA BHP
Porządek na stanowisku laboratoryjnym oraz przygotowanie studentów do
zajęć jest podstawą bezpiecznej pracy. Łączenia obwodów elektrycznych należy
dokonywać
w
stanie
beznapięciowym.
Po
zakończeniu
łączenia
niewykorzystane przewody należy powiesić na wieszaku na przewody.
Przy
stanowisku
badawczym
środkiem
dodatkowej
ochrony
przeciwporażeniowej jest izolowanie stanowiska ze względu na dostępne części
czynne obwodu elektrycznego o napięciu przekraczającym napięcie bezpieczne.
Dlatego łączenia, przełączania i zmian w układzie sterowania można dokonywać
tylko przy wyłączonej sieci zasilającej na danym stanowisku.

19
W celu uniknięcia porażenia prądem elektrycznym osoby wykonujące
ćwiczenia powinny w czasie uruchamiania układu sterowania zachować
odpowiednie oddalenie od części czynnych (będących pod napięciem).
VI. LITERATURA:
1. Barlik R., Nowak M.: Technika tyrystorowa, WNT, Warszawa 1992.
2. Jaczewski J., Opolski A., Stolz J.: Podstawy elektroniki i energoelektroniki,
WNT, Warszawa 1981.
3. Hempowicz P. i inni: Elektrotechnika i elektronika dla nieelektryków. WNT
Warszawa 1999.
Wyszukiwarka
Podobne podstrony:
BADANIA SYMULACYJNE STEROWANIA Nieznany
4M Badanie prostownik w jednof Nieznany
cw nr 7 prostowniki sterowane t Nieznany
Badanie prostownika sterowanego 1-fazowego, Politechnika Lubelska
Badanie prostownika trojfazowego sterowanego
Badanie ukladow sterowania ze s Nieznany (2)
1 Identyfikacja obiektow sterow Nieznany (2)
1 Badanie filtrow RC Nieznany (2)
Montowanie i badanie sieci tele Nieznany
Implementacja i badania algorytmów sterowania robotem dwukołowym
KOMPUTEROWE SYSTEMY STEROWANIA Nieznany
Badanie stalych materialowych s Nieznany (2)
BADANIE PROSTOWNIKA REWERSYJNEGO Z BLOKADĄ PRĄDÓW WYRÓWNAWCZYCH
BADANIE STATYSTYCZNEGO CHARAKTE Nieznany
Badania aktywnosci mineralnych Nieznany
Badanie lamp metalohalogenkowyc Nieznany
więcej podobnych podstron