Pytanie 1
OSNOWĘ III KLASY
stanowi zbiór punktów będących dalszym rozwinięciem osnowy II klasy, służących do
nawiązania osnowy pomiarowej i wykonywania szczegółowych pomiarów geodezyjnych.
Osnowa III klasy powinna być zakładana:
1. na terenach intensywnie zainwestowanych – metodami bezpośrednich pomiarów geodezyjnych lub metodą
fotogrametryczną, (zagęszczenie łącznie z I i II klasą – 1pkt/15ha).
2. na terenach rolnych – metodą fotogrametryczną (zagęszczenie łącznie z I i II kl. 1pkt/30ha).
Jeżeli skala zdjęć dla opracowań fotogrametrycznych na terenach rolnych uniemożliwia osiągnięcie wymaganej
dokładności, zamiast osnowy III kl. dopuszcza się założenie metodą fotogrametryczną trwale stabilizowanej osnowy pomiarowej.
Podstawą do przeprowadzenia prac związanych z założeniem sieci III kl. jest zatwierdzony projekt techniczny. W ramach
opracowania projektu techn. sieci powinna być przeprowadzona analiza i ocena istniejących materiałów geodezyjno-
kartograficznych oraz ogólne rozpoznanie sytuacji terenowej. Projekt powinien w maksymalnym stopniu uwzględniać
wykorzystywanie w nowej sieci istniejących znaków geodezyjnych i przydatnych wyników pomiaru sieci dawnych. Lokalizacja
punktów powinna zapewniać prawidłowe nawiązanie osnowy pomiarowej oraz umożliwiać bezpośrednie wykorzystanie punktów
do pomiarów szczegółowych.
Projekt techniczny sieci III kl.
powinien być opracowany na mapie topograficznej (skala 1:10000) na którą należy
wnieść:
1. wszystkie istniejące punkty osnowy podstawowej i szczegółowej
2. trwale stabilizowane punkty osnowy pomiarowej, przewidziane do włączenia do nowej sieci.
3. punkty osnowy wysokościowej.
4. przybliżoną lokalizację projektowanych punktów (przy metodzie fotogrametrycznej) lub przebieg projektowanych
ciągów poligonowych.
Dokumentacja projektu
techn. powinna zawierać:
1. opis techn. projektu:
•
zasięg projektowanej sieci,
•
punkty nawiązania sieci,
•
sposób wykorzystania istniejących sieci,
•
metodę (technologię) realizacji projektu,
•
stopień zagęszczenia punktów w sieci.
2. mapę projektu.
3. szkic projektu sporządzony na podstawnie mapy projektu.
4. opis topograficzny istniejących punktów objętych projektem.
Punkty III kl. należy stabilizować:
1. na terenach zabudowanych – wieloznakowo – za pomocą znaków ściennych (co najmniej 3 na pkt).
2. na terenach nie zabudowanych – za pomocą znaków z tworzyw sztucznych lub przyjmować istniejące znaki.
Przy wyznaczaniu
punktów III kl. w zależności od stosowanej metody, powinny być spełnione następujące warunki:
1. metoda aerotriangulacji analitycznej:
a) punkty nawiązania i punkty wyznaczane powinny znajdować się w miejscach odsłoniętych (odległość punktu od przeszkody,
zasłaniającej widoczność z góry, nie powinna być mniejsza od wysokości tej przeszkody)
b) na każdym wyznaczanym punkcie powinny istnieć dwie wizury (ziemia – ziemia ), a w trudnych warunkach terenowych – jedna
na punkty osnowy podstawowej lub szczegółowej
c) wszystkie punkty objęte projektem powinny być zestabilizowane przed wykonaniem zdjęć
d) sygnalizacja fotogrametryczna punktów powinna być wykonana bezpośrednio przed wykonaniem zdjęć
e) środek znaku sygnalizacji fotogrametrycznej powinien być położony centrycznie względem centra znaku geodezyjnego z
dokładnością 0,01 m
f) różnica wysokości między dwoma pomiarami współrzędnych tłowych każdego punktu po uwzględnieniu skali zdjęcia , nie
powinna być większa od 0,10 m
2. metoda poligonizacji:
a) ciągi powinny być zbliżone do prostoliniowych,
b) każdy c. powinien być nawiązany obustronnie kątowo i liniowo,
c) długości pojedynczych ciągów nie powinny być większe od 4,5km, a celowe wyznaczających punkty węzłowe od 3km,
d) długości boków w ciągów od 150-600m (średnia dł. <300m),
e) średni błąd pomiaru kątów i długości boków w zależności od długości ciągów:
Długość
ciągu
średnie błędy pomiaru
kąta
dł.
do 2km
15” (45
cc
)
1*10
-4
2-3km
10” (30
cc
)
8*10
-5
3-4,5km
6” (20
cc
)
5*10
-5
3. metoda wcięć:
a) w konstrukcji geometrycznej określającej każdy punkt powinny występować co najmniej 3 elementów wyznaczające, przy czym
kąt przecięcia się jednej, dowolnej wybranej pary tych elementów, powinien wynosić od 45
o
do 135
o
b) długość elementów wyznaczających powinny wynosić od 400m do 5km, przy czym stosowana długości tych elementów na
każdym wyznaczanym punkcie nie powinien być większy niż 4:1,
c) średni błąd pomiaru kątów i długości boków w zależności od długości elementów wyznaczających:
Długość
elementów
w sieci
średnie błędy pomiaru
kąta
dł.
0,4-1,5km
10” (30
cc
)
5*10
-5
1,5-3km
5” (15
cc
)
2,5*10
-5
3-5km
3” (10
cc
)
1,5*10
-5
Dokumentacja powstała
po zakończeniu prac terenowych powinna zawierać:
1. zapisy wyników pomiarów (kątów i dł. boków).
2. zestawienia zredukowanych wyników pomiaru.
3. mapę projektu z ostateczną lokalizacją pktów.
4. szkic sieci.
5. opisy topograficzne pktów.
6. protokoły przekazania znaków pod ochronę.
Wyrównanie sieci III kl. powinno być wykonaną metodą najmniejszych kwadratów.
Pytanie 2
2.1 Zasada niwelacji trygonometrycznej z przyjęciem kuli za powierzchnię odniesienia. Definicja.
Podstawowe wzory. Rysunek.
Niwelacja trygonometryczna jest metodą pomiaru wysokościowego, polegającą na wyznaczaniu wysokości
bezwzględnych, względnych lub różnic wysokości wybranych punktów na podstawie obserwacji: kąta pionowego i odległości
poziomej lub skośnej.
Zasadę tego pomiaru zilustrowano wcześniej na pierwszym rys z punktu 2.6.
Na podstawie pomiaru pionowego kąta pochylenia a lub zenitalnego z i odległości poziomej d określane jest
przewyższenie h, stanowiące różnicę wysokości pomiędzy poziomem przechodzącym przez oś obrotu lunety (horyzontem
instrumentu) a punktem celu. Przewyższenie obliczone na podstawie odległości zredukowanej do poziomu wyraża się wzorem,
α
tg
d
h
⋅
=
zawierającym funkcję trygonometryczną tangens kąta pionowego a nachylenia osi celowej lunety teodolitu względem płaszczyzny
poziomej. Jeśli zamiast kąta a pomierzono kąt zenitalny z. czyli dopełnienie a do 90°, wówczas do obliczenia przewyższenia
posłużymy się wzorami:
z
ctg
d
h
⋅
=
z
tg
d
h
=
Reszta zawarta jest w poniższych punktach.
2.2 Jak określisz wpływ krzywizny Ziemi i refrakcji na wyznaczenie wysokości punktu?
KRZYWIZNA ZIEMI
Wykonanie niwelacji trygonometrycznej przy krótkich celowych, o długości dochodzącej najwyżej do 300 m. nie wymaga
uwzględniania krzywizny Ziemi, ponieważ wpływ tego czynnika nie przekracza wówczas 1 cm. Pozwala to wówczas na przyjęcie
założenia, że powierzchnia odniesienia jest płaszczyzną, zaś prostopadłe do niej kierunki pionu stanowiska i celu są prostymi
równoległymi. Podczas trygonometrycznego pomiaru wysokościowego wykonywanego dla odległych punktów z celowymi ponad
300 m, odnoszenie pomiarów do płaszczyzny może powodować znaczne, nie dające się już zaniedbać błędy, toteż jako
powierzchnię odniesienia pomiaru wysokościowego należy wtedy przyjąć powierzchnię zakrzywioną: kulę, elipsoidę obrotową lub
nawet geoidę
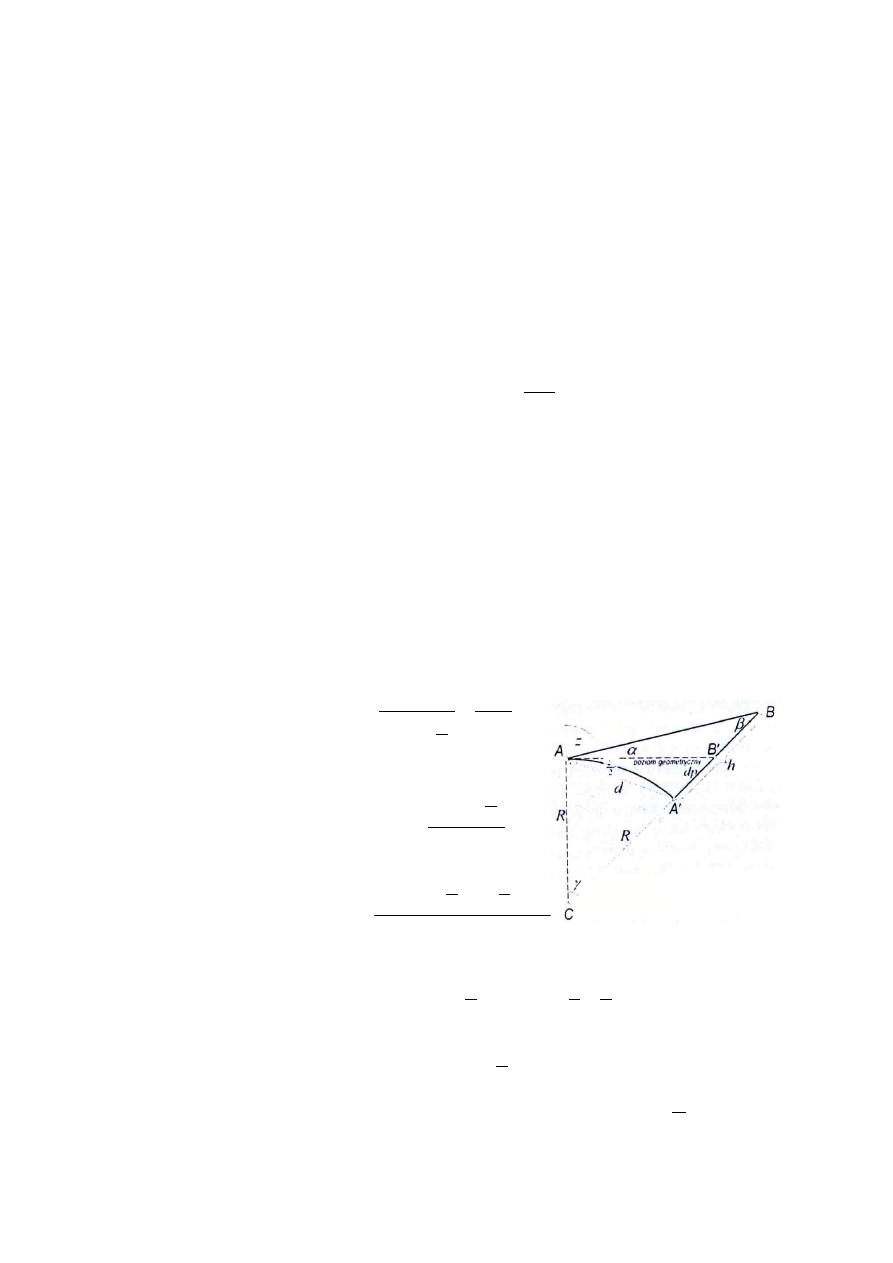
Najczęściej jako powierzchnię odniesienia do trygonometrycznego określania wysokości przyjmuje się kulę o średnim
promieniu R wynoszącym około 6370 km, poprowadzoną przez średni poziom morza, który dla Polski wyznacza aktualnie zero
laty mareografu w Kronsztadzie.
Z twierdzenia sinusów w trójkącie ABA' wynika związek:
β
γ
α
sin
)
2
sin(
d
h
=
+
Natomiast sumy kątów trójkąta ABC:
)
(
90
γ
α
β
+
−
°
=
stad
)
cos(
)
2
sin(
γ
α
γ
α
+
+
=
d
h
oraz
)
cos(
cos
2
sin
2
cos
sin
γ
α
α
γ
γ
α
+
⋅
+
⋅
=
d
h
Ponieważ w porównaniu do kata α kat γ jest przeważnie bardzo mały, toteż można przyjąć że:
α
γ
α
cos
)
cos(
≅
+
1
2
cos
≅
γ
2
2
sin
γ
γ
≅
Po uwzględnieniu powyższych zależności napiszemy więc:
2
γ
α
⋅
+
⋅
=
d
tg
d
h
Z uwagi na małą wartość odległości d w stosunku do promienia Ziemi można również przyjąć, że
R
d
=
γ
stąd przewyższenie h
obliczone z uwzględnieniem krzywizny R Ziemi wyniesie:
R
d
tg
d
h
2
2
+
⋅
=
α
WPŁYW KRZYWIZNY ZIEMI d
p
na trygonometryczny pomiar wysokości wyraża składnik:
R
d
d
p
2
2
=
Wpływ d
p
rośnie proporcjonalnie do kwadratu odległości i osiąga wartość 1 cm dla celowej o długości d= 357 m. natomiast dla
celowej 1 km wynosi już 8 cm.
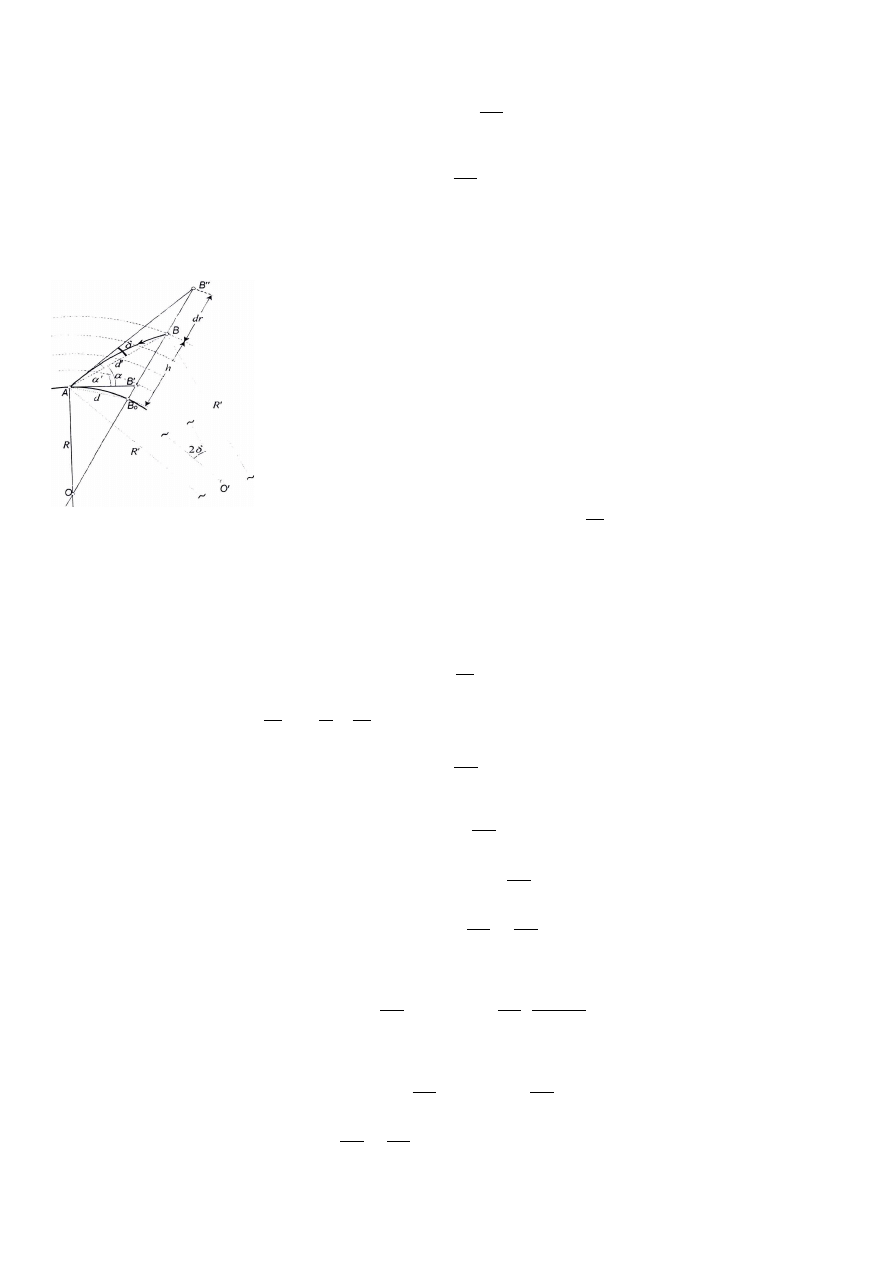
REFRAKCJA
Refrakcja jest zjawiskiem fizycznym, polegającym na załamywaniu się fal świetlnych
na granicach ośrodków stanowiących warstwy powietrza o różnych współczynnikach
załamania (gęstościach). W rezultacie przejścia światła przez atmosferę ziemską, którą można
podzielić na pewną ilość hipotetycznych warstw o gęstości wzrastającej ku dołowi, następuje
załamanie promieni świetlnych w kolejnych warstwach i zmiana kierunku ich biegu z
prostoliniowego na krzywoliniowy.
Bieg prostoliniowy występuje jedynie w ośrodku jednorodnym lub w próżni. W
rzeczywistości gęstość atmosfery nie zmienia się warstwowo, z wyraźnym rozgraniczeniem
poszczególnych warstw, lecz w sposób ciągły, w wyniku czego przebiegający przez nią
promień świetlny nie tworzy linii łamanej, lecz krzywą, zwaną krzywą refrakcyjną, zbliżoną
kształtem do luku kołowego o promieniu R', skierowanego wypukłością ku górze. Stosunek
R:R’, czyli promienia Ziemi do promienia łuku krzywej refrakcyjnej określany jest mianem
współczynnika refrakcji k:
R
R
k
′
=
Na podstawie licznych badań stwierdzono, że średnia wartość współczynnika k wynosi 0.13*(1 ±0.25). W efekcie
zjawiska refrakcji podczas pomiaru kąta pionowego zamiast poprawnego kąta α utworzonego przez linię prostą łączącą punkty A B
zaobserwujemy większy kąt a' (podnoszenie celowej), utworzony przez celową styczną do krzywej refrakcyjnej. Różnica
pomiędzy pomierzonym i powiększonym przez refrakcję kątem α’ i właściwym kątem α stanowi tzw. kąt refrakcji δ, czyli:
α
α
δ
−
′
=
Z rysunku wynika, ze kąt 2δ zapisany w mierze łukowej wynosi:
R
d
′
′
=
δ
2
Ponieważ zgodnie ze wzorem
R
R
k
′
=
R
k
R
′
=
1
, stąd kąt refrakcji δ będzie równy:
R
d
k
2
=
δ
Właściwy kat pionowy α równa się zatem:
R
d
k
2
−
′
=
α
α
Po podstawieniu obliczonego w ten sposób kąta a do wzoru
R
d
tg
d
h
2
2
+
⋅
=
α
uzyskamy przewyższenie:
R
d
R
d
k
tg
d
h
2
)
2
(
2
+
−
′
⋅
=
α
Po rozwinięciu w szereg Taylora funkcji tg(α’ – k*(d/2R)) z pominięciem jako nieistotnych wyrazów rzędu wyższego niż pierwszy
otrzymamy:
α
α
α
′
⋅
⋅
−
′
=
⋅
−
′
2
cos
1
2
)
2
(
R
d
k
tg
R
d
k
tg
Zakładając małą wartość kąta α’ można przyjąć, że cos α’ ≈ 1. stąd:
R
d
k
tg
R
d
k
tg
2
)
2
(
⋅
−
′
≅
⋅
−
′
α
α
Co uwzględnione w formule
R
d
R
d
k
tg
d
h
2
)
2
(
2
+
−
′
⋅
=
α
na przewyższenie h da nam związek:
R
d
R
d
k
tg
d
h
2
2
2
2
+
⋅
−
′
⋅
=
α
zaś ostatecznie:
R
d
k
tg
d
h
2
)
1
(
2
⋅
−
+
′
⋅
=
α
Wielkość dr oznaczająca WPŁYW REFRAKCJI na określenie wysokości metodą niwelacji trygonometrycznej wynosi
więc:
R
d
k
d
r
2
2
⋅
−
=
Wzór na przewyższenie, zawierający łączny wpływ
d
d
d
r
p
u
+
=
krzywizny Ziemi i refrakcji przyjmuje postać:
R
d
k
z
ctg
d
h
2
)
1
(
2
⋅
−
+
⋅
=
Wyznaczona trygonometrycznie różnicę wysokości punktów terenowych S, P można więc zapisać jako:
R
d
k
s
i
z
ctg
d
H
H
H
S
P
SP
2
)
1
(
2
⋅
−
+
−
+
⋅
=
−
=
∆
Przy bardzo dokładnych obliczeniach i długich celowych należy uwzględnić fakt, że powyższy wzór ma charakter
uproszczony , ponieważ pominięto w nim zaniedbywane składniki oraz założono, że powierzchnię odniesienia stanowi kula
(zamiast elipsoidy), zaś odległość d (pozioma i zredukowana do poziomu morza) nie przekracza pięciu kilometrów. Wartości
łącznych poprawek d
u
ze względu na krzywiznę Ziemi i refrakcję (dla współczynnika k = 0,13) zestawiono w tabeli
Współczynnik refrakcji k – wyznaczenie współczynnika refrakcji poprzez pomiar katów pionowych
Założona do obliczeń wartość współczynnika refrakcji k niezbędna do określenia wartości poprawki dr może opierać się
na przyjęciu średniej wątłości tego współczynnika k
śr
= 0.13 lub, przy dokładniejszych pomiarach, aktualnym
wyznaczeniu jej w terenie. Jednoznaczne obliczenie współczynnika k jest trudne i pracochłonne, ponieważ jego wartość
jest wyjątkowo niestabilna i zmienia się pod wpływem wielu czynników, wykazując duże zróżnicowanie (w zakresie 0 - 0.3)
nawet w tym samym miejscu obserwacji w zależności od pory dnia i roku, zanieczyszczenia atmosfery, parametrów
meteorologicznych (temperatury, ciśnienia, wilgotności powietrza) oraz pokrycia terenu. Największą wartość współczynnik
refrakcji osiąga rano i wieczorem, najmniejszą zaś w południe. Do wyznaczenia współczynnika k można wykorzystać zależność :
Odległość
-kilometry
Poprawki d
u
= d
p
+ d
r
- metry
Odległość - metry
0
100
200
300
400
500
600
700
800
900
0
0,000 0,001 0,003 0.006 0,011 0,017 0,025 0,033 0,044 0,055
1
0,068 0,082 0,098 0,115 0,134 0,153 0,175 0,197 0,221 0,246
3
0,273 0,301 0,330 0,361 0,393 0,426 0,461 0,497 0,534 0,573
3
0,613 0,655 0,698 0,742 0,788 0,835 0,883 0,933 0,984 1,037
4
1,090 1,146 1,202 1,260 1,319 1,380 1,442 1,505 1,570 1,636
5
1,707 1,776 1,847 1,918 1,991 2,066 2,142 2,219 2,297 2,377
R
d
k
z
ctg
d
h
2
)
1
(
2
⋅
−
+
⋅
=
Po przekształceniu tego wzoru otrzymamy:
2
)
(
2
1
d
z
ctg
d
h
R
k
⋅
−
−
=
Innym sposobem wyznaczenia współczynnika refrakcji jest jednoczesny pomiar kątów zenitalnych z
A
, z
B
lub kątów
pochylenia α
A
, α
B
na obu końcach lego samego boku AB. Z sumy kałów w trójkącie ABC (rys powyzej) wynika, że:
B
A
δ
δ
ϕ
+
=
Zaś z sumy kątów w czworoboku ACBO:
°
=
+
−
°
+
−
°
+
−
°
360
)
180
(
)
180
(
)
180
(
γ
ϕ
B
A
z
z
stąd
)
(
180
B
A
z
z
−
−
°
=
ϕ
oraz
γ
δ
δ
+
−
−
°
=
+
)
(
180
B
A
B
A
z
z
Z założenia, że krzywa refrakcyjna jest tukiem kołowym, wynika równość:
δ
δ
δ
=
=
B
A
a więc
)
(
180
2
B
A
z
z
+
−
°
+
=
γ
δ
Zaś po uwzględnieniu zależności
R
d
k
2
⋅
=
δ
i wyrażeniu kątów w mierze łukowej otrzymamy:
ρ
π
B
A
z
z
R
d
R
d
k
+
−
+
=
⋅
Końcowy wzór na współczynnik k przyjmie postać:
)
(
1
υ
π
B
A
z
z
d
R
k
+
−
⋅
+
=
2.3 Skąd uzyskasz odległość do punktu niwelowanego np. na wieży?
Odpowiedzi szukać w punkcie 2.8
2.4 Z jaką dokładnością wystarczy ją mieć i dlaczego?
?????
2.5 Dokładność niwelacji trygonometrycznej - jak przedstawia się ona w porównaniu z dokładnością
niwelacji geometrycznej?
W porównaniu z niwelacją geometryczną podstawową zaletą niwelacji trygonometrycznej jest możliwość pomiaru przy
dowolnym nachyleniu osi celowej, wynikająca z zastosowania teodolitu zamiast niwelatora. Zapewnia to duży zakres pomiaru z
jednego stanowiska, brak ograniczeń spowodowanych czytelnością podziału łaty i nieodzownością każdorazowego poziomowania
osi celowej instrumentu pomiarowego. W niwelacji geometrycznej czynniki te zmniejszają zasięg pomiaru wysokościowego z
pojedynczego stanowiska niwelatora do najwyżej l00 m. Zakres stosowania tej niwelacji jest przez to zawężony do wyznaczania
różnic wysokości punktów bliskich i położonych na terenach płaskich lub nieznacznie nachylonych, zaś dla określania różnic
wysokości punktów dalekich zachodzi konieczność zakładania ciągów niwelacyjnych. Ograniczenia te nie dotyczą natomiast
niwelacji trygonometrycznej, ponieważ możliwość dowolnego celowania i pomiaru kątów pionowych pozwala na wyznaczanie
dużych różnic wysokości pomiędzy stanowiskiem instrumentu a odległymi punktami. Warunkiem pomiaru jest tylko zapewnienie
widoczności pomiędzy stanowiskiem a celem.
Wadą niwelacji trygonometrycznej w stosunku do niwelacji geometrycznej jest natomiast przeciętnie niższa dokładność,
charakteryzująca się błędem pomiaru wysokości rzędu od jednego do kilku centymetrów. Czynnik ten powoduje, że niwelacja
trygonometryczna jako metoda wyznaczania wysokości punktów osnowy geodezyjnej może być wykorzystywana w jedynie
odniesieniu do pomiarowych osnów wysokościowych oraz jako technologia określania wysokości punktów geodezyjnej osnowy
poziomej w połączeniu z wyznaczaniem wysokości wybranych elementów wież i sygnałów triangulacyjnych.
Wpływ błędu pomiaru kata, błędu długości i orientacyjny wpływ błędu współczynnika refrakcji możemy określić ze wzoru
na błąd średni funkcji niezależnych obserwacji. Różniczkując funkcję wyrażoną wzorem
)
1
(
2
2
K
R
s
z
ctg
s
H
H
H
O
A
O
A
B
−
+
=
−
=
∆
względem s, z oraz K i podstawiając wartości pochodnych cząstkowych do wzoru Gaussa na błąd średni funkcji bezpośrednich,
niezależnych obserwacji otrzymujemy:
Poszczególne składniki powyższego wzoru dla różnych kątów zenitalnych, różnych odległości, dla błędu kąta m
z
=6” i
błędu długości m
s
=10 cm oraz dla przyjętego błędu współczynnika refrakcji m
K
=0,1 podano w poniższej tabeli:
Z
S
O
90°
80°
wpływ błędu (w cm)
kąta
długości
wsp. refr.
m
ΔH
wpływ błędu (w cm)
kąta
długości
wsp. refr
m
ΔH
100
0,3
0
0,01
0,3
0,3
1,8
0,01
1,8
200
0,6
0
0,03
0,6
0,6
1,8
0,03
1,9
500
1,5
0
0,2
1,5
1,5
1,8
0,2
2,3
1000
2,9
0
0,8
3,0
3,0
1,8
0,8
3,6
2000
5,8
0
3,1
6,6
6,0
1,8
3,1
7,0
3000
8,7
0
7,0
11,2
9,0
1,8
7,0
11,6
4000
11,6
0
12,6
17,1
12,0
1,8
12,6
17,5
5000
14,5
0
19,6
24,4
15,0
1,8
19,6
24,7
2.6 Podaj przykłady zastosowania niwelacji trygonometrycznej na krótkie odległości. Co oznaczają
tzw.„krótkie odległości"?
Dla krótkich celowych, za które uważa się celowe o długości poniżej 300 m. do obliczenia wysokości punktu P na którym
ustawiono sygnał o wysokości s, obserwowany ze stanowiska S
instrumentem, znajdującym się nad znakiem geodezyjnym na wysokości
i, posługujemy się wzorami:
p
t
H
H
H
A
B
AB
−
=
−
=
∆
oraz
s
h
i
H
H
S
P
−
+
+
=
Zgodnie z tymi zależnościami na błąd trygonometrycznego
określenia wysokości punktu P wpływają:
•
dokładność pomiaru odległości d
•
dokładność pomiaru kąta zenitalnego z
•dokładność pomiaru wysokości: instrumentu - i oraz sygnału – s
Za przykład na zastosowanie niwelacji trygonometrycznej na krótkie odległości może nam posłużyć wyznaczenie
wysokości podwyższonego sygnału geodezyjnego, stosowanego przy pomiarach osnów szczegółowych, co pokazuje rysunek:
O
h
O
tg
d
H
C
+
=
+
⋅
=
α
-
wzór na wysokość punktu C nad znakiem geodezyjnym
Jeśli nie ma dostępu do świecy sygnału (po drabinie odpowiedniej długości), przyłożenia do miejsca celowania na te
świecy początku taśmy i opuszczenia do znaku geodezyjnego, to stosuje się trygonometryczny sposób określania wysokości.
Schemat pomiaru pokazany jest na powyższym rysunku. Odległość d jest zmierzona do punktu C’, który jest rzutem punktu C na
powierzchnię terenu. Punkt C’ może nie pokrywać się z punktem geodezyjnym zastabilizowanym w terenie ze względu na
mimośród sygnału. O – jest odczytem z łaty.
2.7 Kiedy i dlaczego przyjmujemy płaszczyznę a nie kulę za powierzchnię odniesienia?
Wykonanie niwelacji trygonometrycznej przy krótkich celowych, o długości dochodzącej najwyżej do 300 m. nie wymaga
uwzględniania krzywizny Ziemi, ponieważ wpływ tego czynnika nie przekracza wówczas 1 cm.
2
2
4
2
2
2
4
2
4
sin
K
O
S
z
O
H
m
R
s
zm
ctg
m
z
s
m
+
+
=
∆
2.8 Jak wyznaczamy wysokość punktu niedostępnego (komina, masztu itp.)?
Na rysunku przedstawiony jest schemat pomiaru
wysokości punktu niedostępnego. Schemat a) w rzucie na
płaszczyznę pozioma, natomiast b) na płaszczyznę pionowa.
Trójkąt ABP powinien być, w miarę możliwości,
równoboczny. Z rozwiązania trójkąta obliczamy odległość d
1
i d
2
.
)
sin(
sin
2
1
2
1
β
β
β
+
=
b
d
)
sin(
sin
2
1
1
2
β
β
β
+
=
b
d
WYSOKOSC PUNKTU P nad reperem wyznaczamy ze wzorów:
1
1
1
1
α
tg
d
O
H
+
=
2
2
2
2
α
tg
d
O
H
+
=
Konstrukcja ta posiada częściową kontrolę pomiaru. Popełniając błąd pomiarze bazy lub kąta poziomego obliczymy
błędne odległości d
1
i d
2
, a stąd i błędne wysokości. Niezależny pomiar dwóch kątów pochylenia α
1
i α
2
umożliwia, przy
prawidłowym określeniu odległości, dwukrotnie i niezależne wyznaczenie wysokości punktu P. jeśli wyznaczamy wysokość
niesygnalizowanego wybranego punktu jakiejś konstrukcji, to mogą wystąpić trudności w identyfikacji tego punktu z dwóch
stanowisk. Może to mieć wpływ na prawidłowość pomiarów kątów.
Średni błąd wyznaczenia wysokości określa się z wzoru na błąd funkcji mierzonych wielkości niezależnych.
2
2
2
1
2
2
2
2
1
1
2
2
1
1
4
2
2
1
2
1
2
2
2
1
1
1
1
1
1
]
)
sin(
[
]
)
(
[
)
(
cos
β
β
α
β
β
β
β
α
α
m
d
m
tg
d
m
b
d
m
m
d
m
tg
m
m
b
d
d
O
H
+
+
+
+
=
+
+
=
m
α
, m
β
, m
b
, są to średnie błędy pomiarów katów pionowych, poziomych i bazy.
Jeśli warunki terenowe nie pozwalają na zrealizowanie w terenie trójkąta w przybliżeniu równobocznego w celu
wyznaczenia odległości, wtedy stosujemy konstrukcje pokazana na rysunku.
Baza b usytuowana jest w taki sposób, aby jej przedłużenie przechodziło przez punkt P, którego wysokość jest
wyznaczana. Mierzymy następujące elementy, pokazane na powyższym schemacie pomiaru w rzucie na płaszczyznę pionową: kąty
pionowe α
1
i α
2
, długość bazy b, odczyty O
1
oraz O
2
na łacie ustawione na reperze odniesienia (przy poziomej osi celowej
teodolitu).
Na podstawie powyższego rysunku możemy napisać wzór na wysokość H punktu P:
1
1
.
2
2
.
)
(
α
α
xtg
O
H
H
tg
x
b
O
H
H
rep
P
rep
P
+
+
=
+
+
+
=
Przyrównując do siebie wysokości określone obydwoma wzorami, możemy wyznaczyc odległość x:
1
2
2
2
1
)
(
α
α
α
tg
tg
btg
O
O
x
−
−
−
=
Po obliczeniu odległości x na podstawie powyższego wzoru, oblicza się różnicę wysokości stosując obydwa z
przytoczonych wzorów. Konstrukcja jest jednoznaczna, dwa wzory na wysokość dają wyłącznie kontrole obliczeń. Stosując taką
konstrukcję do wyznaczenia wysokości, zakładamy najczęściej w terenie dwie bazy niezależne.
Średni błąd wyznaczanej różnicy wysokości oblicza się ze wzoru Gaussa na błąd średni niezależnych obserwacji. Należy pamiętać,
że pochodne cząstkowe oblicza się względem wielkości mierzonych, dlatego należy różniczkować wzór na różnicę wysokości H
po uprzednim podstawieniu do niego wielkości x wyrażonej w funkcji wielkości mierzonych. Podstawiając do wzoru Gaussa
pochodne cząstkowe obliczone na podstawie pierwszego i drugiego z wzorów na wysokość otrzymujemy nieco inne formy
wzorów na średni błąd różnicy wysokości:
2
4
2
2
2
1
4
2
2
2
1
2
2
2
1
2
4
2
1
2
1
2
1
4
2
1
2
2
2
2
1
sin
sin
)
(
1
sin
)
(
sin
)
(
1
2
1
2
1
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
m
tg
x
m
xtg
O
O
m
ctg
ctg
m
m
tg
x
b
O
O
m
tg
x
b
m
ctg
ctg
m
b
H
b
H
+
+
−
+
−
=
+
−
−
+
+
+
−
=
Na podstawie obydwu tych wzorów otrzyma się jednakowe wartość średniego błędu, bo wysokość jest wyznaczana
jednoznacznie, chociaż korzystać możemy z dwóch wzorów.

Pytanie 3
3.1 Zdefiniuj pojęcia atestacji i komparacji dalmierza
Atestacja polega na przeprowadzeniu szeregu badań laboratoryjnych oraz pomiarów geodezyjnych wykonywanych na
zalegalizowanej krajowej bazie długościowej, czyli uznanej za metrologiczną bazę do utrzymania jednolitej skali sieci
geodezyjnych w całym kraju (patrz rozdział 3). W wyniku atestacji dalmierz otrzymuje świadectwo atestacji, które zawiera
aktualne poprawki instrumentalne oraz jest dowodem, że dalmierz został skalibrowany i uznany za instrument nadający się do prac
geodezyjnych. Atestacja m.in. obejmuje: sprawdzenie częstotliwości wzorcowych, wyznaczenie stałej dodawania, sprawdzenie
poprawności działania fazomierza i ewentualnie wyznaczenie poprawek do wskazań fazomierza, określenie zasięgu dalmierza,
dokładności pomiaru odległości oraz sprawdzenie i rektyfikację sprzętu pomocniczego.
Komparacja polega na sprawdzeniu, czy wyznaczone podczas atestacji parametry nie uległy zmianie i na ewentualnym
uaktualnieniu ich oraz na ogólnym przeglądzie i konserwacji. Komparację należy przeprowadzić przed sezonem pomiarowym.
Okresowe sprawdzenia dalmierza mają na celu skontrolowanie przez użytkownika poprawności działania przyrządu.
Kontrole te chronią wykonawcę przed pomierzeniem dużej liczby boków sieci za pomocą niesprawnego dalmierza. Sprawdzenia
takie powinny być przeprowadzane co miesiąc na lokalnej bazie kontrolnej, a przy intensywnej eksploatacji dalmierza częściej.
W procesie pomiaru odległości dalmierzami elektromagnetycznymi czynne są jak wiadomo różne źródła błędów
przypadkowych i systematycznych obciążających ostateczny rezultat tegoż pomiaru. Starano się scharakteryzować najważniejsze z
tych błędów oraz przedstawić sposoby eliminowania lub wydatnego zmniejszenia ich wpływu na wyniki pomiaru. W
szczególności, omawiając zasady funkcjonowania dalmierzy i procesy pomiarowe, zwracano uwagę na możliwości
przeciwdziałania powstawaniu niektórych błędów instrumentalnych przez odpowiednie operacje pomiarowe i regulacyjne
wykonywane na stanowisku pomiarowym. W praktyce pomiarowej występują jednak błędy instrumentalne o charakterze
systematycznym, które nie mogą być w ten sposób kontrolowane ani usuwane, ale są przedmiotem oddzielnego postępowania
pomiarowo-badawczego zmierzającego do wyznaczenia odpowiednich poprawek kompensacyjnych. Postępowanie takie będziemy
nazywali komparacją dalmierzy.
3.2 Jakie parametry dalmierza podlegają okresowej kontroli?
Z reguły drogą komparacji kontroluje się i wyznacza dla danego dalmierza trzy następujące wielkości:
częstotliwość wzorcową f
w
, lub związany z nią współczynnik skali długości,
poprawkę k („stałą") dodawania,
błąd cykliczny fazomierza.
Specjalne badania wykonywane są niekiedy w celu doświadczalnego wyznaczenia błędu średniego pomiaru odległości
danym dalmierzem.
Większość wspomnianych badań prowadzi się na specjalnych bazach komparacyjnych zwanych także bazami testowymi.
Na ogół zaleca się, aby badania wymienionych wyżej (1-3) wielkości były przeprowadzane oddzielnie dla każdej z nich. Jednakże
w przypadku korzystania z terenowych baz komparacyjnych stosowane są często metody równoczesnego wyznaczania dwóch lub
nawet wszystkich trzech poprawek.
Wspomniane wyżej terenowe bazy komparacyjne mają najczęściej długość ok. 1km. Ze względu na konieczność
zapewnienia korzystnych warunków fizycznych dla pomiarów komparacyjnych, bazy takie powinny być zakładane w terenie
suchym i przewiewnym. Linia bazy powinna być /orientowana równolegle do kierunku panujących wiatrów. Pożądane jest także,
aby powierzchnia terenu samej bazy była płaska i porośnięta trawą. Ten warunek, a także ten aby teren bazy nie był podmokły, ma
istotne znaczenie dla komparacji dalmierzy mikrofalowych (ze względu na błąd odbicia).
Punkty stałej bazy terenowej utrwala się zwykle filarami obserwacyjnymi, posadowionymi poniżej poziomu przemarzania
gruntu. Każdy z filarów wyposażony jest zwykle w urządzenie do wymuszonego centrowania instrumentów, długości
poszczególnych odcinków stałej bazy komparacyjnej są zwykle pomierzone z dokładnością co najmniej o jeden rząd wyższą od
dokładności komparowanych dalmierzy
3.3 Idea stałej dodawania zestawu pomiarowego dalmierz – lustro.
Podczas pomiaru odległości geometryczne osie pionowe dalmierza, reflektora zwrotnego (lustra) pokrywają się (w
zakresie dokładność centrowania) z centrami punktów geodezyjnych A i B (rysunek poniżej).
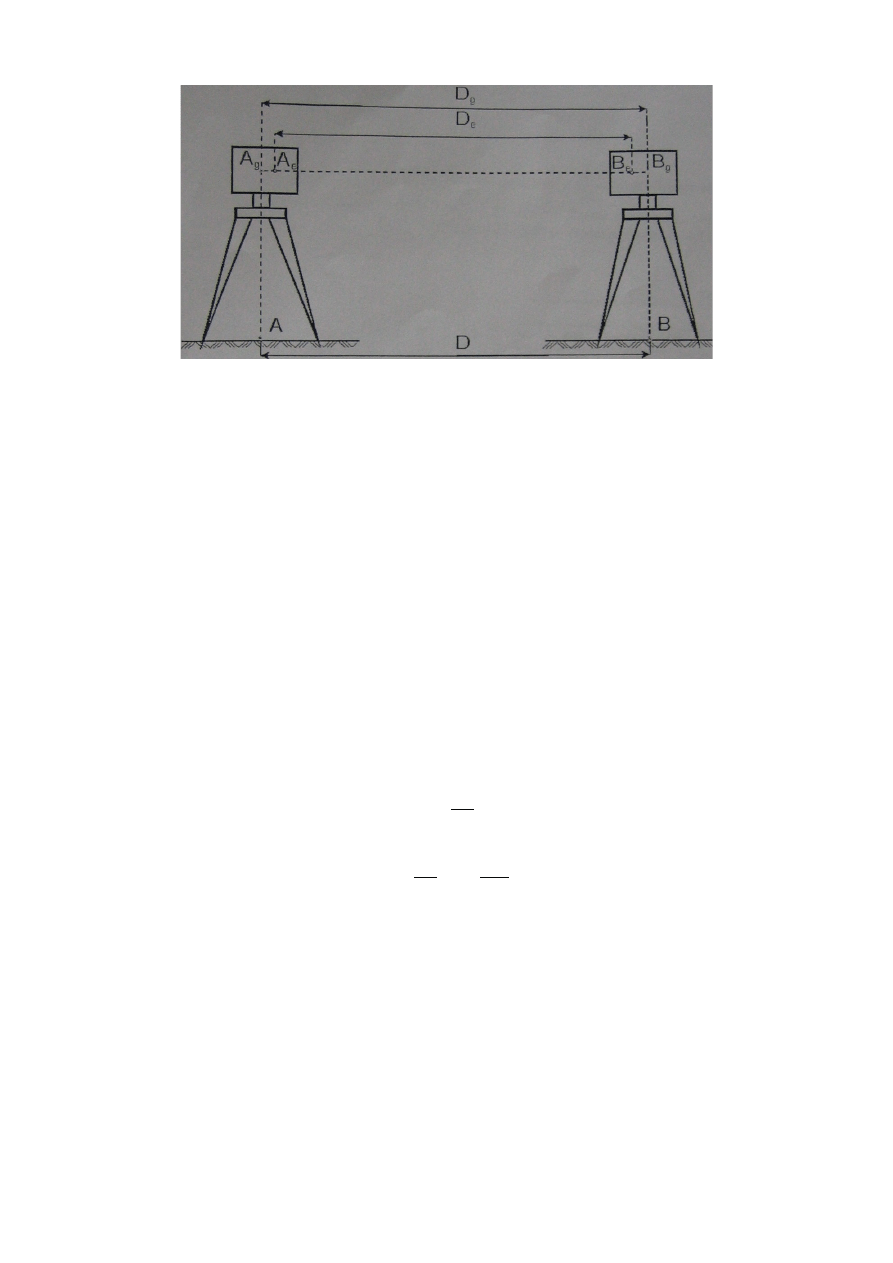
Punkty przecięcia się geometrycznych osi pionowych dalmierza i lustra z linią mierzonego odcinka są tzw. centrami
geometrycznymi, gdzie punkt A
g
jest centrem geometrycznym dalmierza, a punkt B centrem geometrycznym lustra. Natomiast
porównanie faz sygnału powracającego do dalmierza po odbiciu od lustra i sygnału pierwotnego (wysyłanego) odbywa się w
punkcie A
e
, zwanym centrem elektronicznym dalmierza. Podobnie w przypadku reflektora zwrotnego odbicie sygnału
pomiarowego następuje w punkcie B
e
, który jest jego centrem elektronicznym.
W związku z tym bezpośrednio mierzona jest odległość D
e
, która różni się od poszukiwanej przez nas odległości D
g
(pomiędzy centrami punktów geodezyjnych) o wartość c - oznaczającą stałą dodawania, użytego do pomiaru zestawu dalmierz -
lustro:
e
g
D
D
c
−
=
3.4 Geodezyjne metody sprawdzania stałej dodawania i ich dokładność.
Komparacja częstości względnej
Jak wiadomo, wzorzec długości ½ λ
w
dalmierza fazowego określony jest przez podstawową częstotliwość wzorcową f
w
według wzoru. Częstotliwość ta wytwarzana jest z reguły przez generator kwarcowy, który zapewnia wysoki stopień jej
stabilizacji. Ponadto, w celu uniezależnienia tej częstotliwości od temperatury otoczenia, w wielu dalmierzach - zwłaszcza
średniego i dużego zasięgu - umieszcza się oscylator kwarcowy generatora w termosie Pod wpływem różnych czynników, głównie
zaś na skutek starzenia się kwarcu częstotliwość ta może się jednak zmieniać w stopniu znaczącym co powoduje zmianę skali
mierzonych odległości. Z tego powodu przynajmniej podstawowa częstotliwość wzorcowa musi być okresowo kontrolowana a
stwierdzone jej odchylenie co od wartość normalnej f
w
, czyli różnica:
w
wN
f
f
f
−
=
∆
musi być odpowiednio uwzględnione w wynikach pomiarów długości
Zgodnie ze wzorcem poprawka do pomierzonej odległości D komparująca wpływ odchylenia d
f
wyraża się wzorem
D
f
f
D
w
f
∆
=
δ
A jej wartość jednostkowa, określająca zmianę skali wzorem
]
[
10
6
km
mm
f
f
k
w
s
⋅
∆
=
W literaturze wielkość k
s
podawana jest często w jednostkach p.p.m. (ang.: parts per million).
W zasadzie komparację częstotliwości wzorcowych powinno się przeprowadzać w sposób bezpośredni przez porównanie
jej aktualnej wartości f
w
z częstotliwością - etalonem, wytwarzaną przez specjalne generatory. Komparacja taka polega na
mieszaniu obydwóch tych częstotliwości i wyznaczeniu wartości ich różnicy.
w
e
f
f
f
−
=
∆
Tego rodzaju bezpośredni pomiar częstotliwości f
w
przeprowadza się w laboratoriach odpowiednich instytucji (w Polsce: Centralny
Urząd Jakości w Warszawie, Instytut Geodezji i Kartografii) z dokładnością rzędu ±1-10
-7
3.5 Polowe sprawdzanie stałej dodawania zestawu dalmierz-lustro.
Komparację częstotliwości f
w
można także kontrolować w warunkach polowych przez porównanie jej wartości z tzw.
krajowym wzorcem częstotliwości fal radiowych emitowanych regularnie przez niektóre stacje radiowe oficjalnie stałość jest rzędu
5*10
-9
. Poprawkę z tytułu zmian częstotliwości f
e
podaje codziennie Radio Polskie o godz. 12.
Do tego celu są stosowane specjalne radioodbiorniki wyposażone w układ do pomiaru różnicy d
f
Proces komparacji opisanymi sposobami znacznie się upraszcza, gdy częstotliwość f
w
jest równa częstotliwości f
e
lub stanowi jej
wielokrotność. Dokładność komparacji drugim sposobem ocenia się na 1*10"
6
.
Kontrolę podstawowej częstotliwości wzorcowej dalmierzy zaleca się przeprowadzać 2 - 3 razy w ciągu roku.
Współczynnik zmiany skali k
s
, a pośrednio i częstotliwość f
w
, mogą być kontrolowane przez pomiar danym dalmierzem
bazy komparacyjnej o dokładnie znanej długości D. Jeżeli bowiem do wyniku tego pomiaru zostanie wprowadzona poprawka
dodawania k oraz poprawka z tytułu błędu cyklicznego, to
km
mm
D
D
D
k
s
]
[
−
=
gdzie D - długość bazy pomierzona dalmierzem.
W
najprostszym przypadku można wyznaczyć poprawkę k mierząc danym dalmierzem bazę komparacyjną, której
długość D jest znana z wysoka dokładnością. Jeżeli wynik tego pomiaru jest wolny od błędu skali i błędu cyklicznego to jest to po
prostu
D
D
k
−
=
Poprawkę można również wyznaczyć mierząc danym
dalmierzem nieznaną długość D, nieznanej bazy oraz dwie jej części D
1
i
D
2
.
Wyniki tych pomiarów muszą spełniać następujący warunek:
k
D
k
D
k
D
3
2
1
+
=
+
+
+
z którego wynika związek
)
D
D
(
D
k
2
1
3
+
=
Sposób powyższy można uogólnić, dzieląc całą bazę na n odcinków o nieznanych długościach: D
1
, D
2
,..., D
n
. Jeżeli
bowiem danym dalmierzem zostaną pomierzone wszystkie odcinki D
i
(i= 0, 1, 2, ..., n) oraz cała długość D bazy, to powyższy
wzór przyjmie postać ogólną
)
(
1
1
1
∑
=
−
−
=
n
i
i
D
D
n
k
Jeżeli poprawki z tytułu błędu cyklicznego nie są znane, to wpływ takich błędów na wyznaczenie poprawki k można
wydatnie ograniczyć przez odpowiedni dobór długości odcinków D
i
. Mianowicie, wychodząc ze znanej zależności
i
w
i
i
l
N
D
+
=
λ
2
gdzie
w
i
w
i
l
λ
π
ϕ
λ
⋅
∆
=
∆
=
2
Można dobrać długości kolejnych odcinków D
i
tak aby odczyty „reszt” li były rozmieszczone równomiernie na całym
zakresie wzorca długości λ
w
\2. Ponieważ pełny okres zmienności błędu cyklicznego uwidacznia się właśnie w przedziale λw, więc
można się spodziewać ze przy tworzeniu sumy Di dodatnie i ujemne wyniki tego błędu ulegają znacznej kompensacji
Sposób ten jest szczególnie wygodny (choć nie zupełnie ścisły) przy kontrolowaniu poprawki k podczas pomiarów
wykonawczych z dala od stałej bazy komparacyjnej. Założona w danym terenie prowizoryczna baza testowa z reguły nie jest
utrwalana filarami obserwacyjnymi
3.6 Uzupełnienie od Pawła
Lokalną bazę kontrolną AB z punktami pośrednimi (rys. 7.15) wybieramy w możliwie równym i odsłoniętym terenie tak,
aby warunki pomiarowe były dobre. Lokalną bazą kontrolną może być również bok długości około 800 m mierzonej sieci. Punkty
końcowe bazy A i B oraz punkty pośrednie: punkt C w odległości około 200 m od początku bazy i punkt D w odległości około 500
m od początku bazy, starannie stabilizujemy ziemnymi znakami geodezyjnymi wyposażonymi w centr umożliwiający ustawianie
dalmierza i reflektorów za pomocą pionu optycznego z błędem średnim nie przekraczającym 1 mm. Podczas pierwszego pomiaru
(wyjściowego) długości sześciu odcinków wzorcowych: AC, AD, AB, CD, CB, DB mierzymy dalmierzem używanym do pomiaru
sieci, przy czym pomiary te należy wykonać bezpośrednio po przeprowadzeniu atestacji lub komparacji dalmierza.
o------o--------------o--------o
A C D B
Rys. 7.15. Rozmieszczenie punktów pośrednich na lokalnej bazie do kontroli dalmierzy elektrooptycznych Wyniki
pomiaru uznajemy za prawidłowe, jeżeli spełnione są następujące zależności:
2
2
2
2
AB
DB
CD
AC
S
S
S
S
m
m
m
m
AB
DB
CD
AC
+
+
+
≤
−
+
+
2
2
2
AB
DB
AD
S
S
S
m
m
m
AB
DB
AD
+
+
≤
−
+
2
2
2
AB
CB
AC
S
S
S
m
m
m
AB
CB
AC
+
+
≤
−
+
2
2
2
AD
CD
AC
S
S
S
m
m
m
AD
CD
AC
+
+
≤
−
+
2
2
2
CB
DB
CD
S
S
S
m
m
m
CB
DB
CD
+
+
≤
−
+
Pomiary kontrolne wykonujemy minimum raz na miesiąc według takich samych zasad, jak pomiar wyjściowy. Dalmierz uznajemy
za sprawny, jeżeli na wszystkich sześciu odcinkach kontrolnych zachodzi zależność:
s
kont
wyjśy
m
d
d
2
.
.
≤
−
W wypadku uzyskania większych różnic dalmierz należy przekazać do specjalistycznego laboratorium w celu wykonania
komparacji.
Zgodnie z instrukcją G-2 dalmierze elektrooptyczne wykorzystywane do pomiarów osnów poziomych powinny być
sprawne techniczne, mieć metrykę instrumentu, atest i aktualne świadectwo komparacji. Atestacja przyrządów pomiarowych,
legalizująca sprzęt stosowany do prac geodezyjnych, jest w Polsce wykonywana przez Instytut Geodezji i Kartografii (IGiK)w
Warszawie. Dotyczy ona w szczególności nowych dalmierzy elektrooptycznych oraz tych, w których podczas naprawy
wymieniano układ nadawczo-odbiorczy lub elementy fazomierza. W ramach atestacji określa się: dokładność, zasięg, stałą
dodawania, poprawkę fazomierza, częstotliwość wzorcową dalmierza (zob. ust. 5.7) oraz dokonuje sprawdzenia i rektyfikacji jego
osprzętu.
Komparacja okresowa polega na sprawdzeniu i aktualizacji parametrów technicznych dalmierza oraz przeglądzie
osprzętu. Dokonuje jej także Instytut Geodezji i Kartografii lub jednostka przez niego upoważniona. Komparację przeprowadza się
na po naprawie instrumentu oraz na początku i końcu sezonu pomiarowego, jednak nie rzadziej niż jeden raz w roku. Wyniki
komparacji wpisywane są do metryki instrumentu oraz wydawane jest urzędowe świadectwo komparacji.
Celem kontroli polowych, które powinny być dokonywane przez użytkownika sprzętu przynajmniej raz na miesiąc, jest
sprawdzenie najważniejszych parametrów dalmierza oraz weryfikacja jakości pracy obserwatora. Dla systematycznego
sprawdzania przyrządu należy w terenie równym i odkrytym założyć wcześniej bazę kontrolną AB (rys. 5.17) o łącznej długości
ok. 800 m i wyznaczyć punkty pośrednie 7, 2 w odległości ok. 200 m i 500 m od punktu początkowego A bazy. Punkty A, 1, 2, B
należy zastabilizować znakami typu 30 lub 36 (rys. 4.7) z wyraźnymi centrami mosiężnymi lub ceramicznymi. Pierwszy pomiar
bazy, dostarczający danych wyjściowych powinien być wykonany niezależnie dwoma atestowanymi i dokładnie wcześniej
sprawdzonymi dalmierzami.
W ramach kontroli polowej pomiarowi w sześciu seriach podlegają odległości: d
0
, d
1
, d
2
, d
3
, d
4
, d
5
. Pomiar każdej z sześciu wyżej
wymienionych długości uzyskanych jako średnia z wyników serii można uznać za prawidłowy, jeżeli wyniki pomiaru kontrolnego
są zgodne z pomiarem wyjściowym w granicach podwójnego błędu m
d
obliczonego z zależności
)
10
(
6
d
b
a
m
d
⋅
⋅
+
±
=
−
gdzie:
a) składnik stały, zawierający w sobie zespół jednostkowych błędów instrumentalnych oraz błąd określenia poprawek
instrumentalnych dalmierza
b} współczynnik proporcjonalny do mierzonej odległości, zawierający błędy: wyznaczenia prędkości fali elektromagnetycznej w
próżni i warunkach pomiarowych, określenia częstotliwości wzorcowej i przesunięcia fazowego
c) długość mierzonego odcinka wyrażona w metrach
a ponadto spełniają następujące nierówności:
m
02
,
0
d
-
d
d
d
0
4
3
1
≤
+
+
m
02
,
0
d
-
d
d
0
3
2
≤
+
m
02
,
0
d
-
d
d
0
4
1
≤
+
m
02
,
0
d
-
d
d
2
5
1
≤
+
m
02
,
0
d
-
d
d
4
5
3
≤
+
Stała dodawania
Poprawka stałej dodawania dalmierza K5 jest w rzeczywistości poprawką układu utworzonego przez dalmierz i reflektor
zwrotny, składa się zatem z dwóch części. Część związana z dalmierzem wiąże się z jego konstrukcją i działaniem, toteż może z
czasem ulegać pewnym zmianom. Druga, niezmienna część stałej K
S
pochodzi od reflektora i związana jest z jego budową.
Jeśli korzystamy z oryginalnego zestawu fabrycznego dalmierz - pryzmat, wtedy stała K
S
jest z reguły równa zeru, co przeważnie
jest wyraźnie zaznaczone w instrukcji obsługi danego instrumentu. Posługując się nieoryginalnym pryzmatem jesteśmy
zobowiązani dokonać wyznaczenia stałej K
s
. Można tego dokonać podczas sprawdzenia okresowego, mierząc przy pomocy
zestawu dalmierz - pryzmat znane wcześniej długości odcinków na bazie kontrolnej (rys. 5.17). Wartość stałej K
S
możemy określić
jako średnią z kilku różnic obliczonych pomiędzy długością znaną i pomierzoną. Innym sposobem jest pomiar co najmniej trzech
odcinków, z których dwa stanowią sumę odcinka trzeciego, np- zgodnie z rys. 5.17:
3
2
0
d
d
d
+
=

Wartość stałej wyznaczymy w tym wypadku na podstawie zależności:
)
(
3
2
0
d
d
d
K
S
+
−
=
Do której podstawiamy wyniki pomiaru wspomnianych długości.
Pytanie 4
4.1 CZYNNOŚCI WSTĘPNE POPRZEDZAJĄCE WŁAŚCIWY POMIAR TECHIMETREM
ELEKTRONICZNYM
P
rzebieg czynności wstępnych zależy od rodzaju używanego tachimetru oraz od możliwości prowadzenia automatycznej
rejestracji pomiaru lub jej brak, co wiąże się z koniecznością odręcznego zapisu obserwacji w dzienniku pomiarowym. Niezależnie
od zastosowanego instrumentu najważniejszymi czynnościami wstępnymi, niezbędnymi do określenia położenia i wysokości pikiet
są:
-pomiar wysokości: i-instrumentu , s-sygnału
-orientacja stanowiska na dwa sąsiednie punkty osnowy pomiarowej.
Po ustawieniu tachimetru nad zaznaczonym punktem danego stanowiska, należy zasygnalizować tyczkami dwa sąsiednie
stanowiska. Po spoziomowaniu, scentrowaniu instrumentu i regulacji ostrości krzyża kresek, ustawiamy odczyt zerowy na cel
lewy, po czym celujemy na drugie stanowisko(cel prawy) i dokonujemy odczytu koła poziomego. Kontrolą orientacji jest
późniejsze obliczenie tego kąta ze współrzędnych. Numery obu punktów i odpowiadające im odczyty koła poziomego zapisujemy
w dzienniku pomiarowym lub dokonujemy ich rejestracji w pamięci rejestratora. Jeśli stanowiskiem instrumentu jest punkt
sytuacyjny zidentyfikowany na mapie, wówczas orientację wykonujemy na dwa inne punkty, których położenie zostało ustalone na
mapie i w terenie.
Czynności wstępne na stanowisku obejmują także sprawdzenie błędu miejsca zera tachimetru, przygotowanie rejestratora
lub dziennika pomiarowego, w którym dokonuje się początkowych zapisów obejmujących: nazwę obiektu, wykonawcę i skład
zespołu, numer fabryczny i typ instrumentu, numer stanowiska, wartości kierunków orientacyjnych i oznaczenia punktów, na które
zorientowano stanowisko, wartości i, s , datę pomiaru, stopień trudności terenu, nr szkicu polowego wykonywanego podczas
tachimetrii z danego stanowiska.
4.2 ELIMINACJA BŁĘDU MIEJSCA ZERO(BŁĄD INDEKSU) KOŁA PIONOWEGO V I BŁĘDU
KOLIMACJI KOŁA POZIOMEGO Hz.
Błąd miejsca zera
występuje wtedy, gdy odczyt koła pionowego przy poziomej osi celowej różni się od wartości
teoretycznej 90
0
(KL) lub 270
0
(KP) (dla podziału zenitalnego). Przy pomiarze kątów zenitalnych w I położeniu lunety(KL)
teoretyczna wartość kąta równa się O
1
, a w II położeniu lunety kąt zenitalny wynosi z=360
0
-O
II
. Istniejący błąd indeksu(bł. miejsca
zera) koła pionowego obarcza odczyty w obu położeniach:
O
I
= z+µ O
II
=360
0
-z+µ .
Po dodaniu stronami i przekształceniach otrzymujemy wzór na błąd miejsca zera :
2
360
0
−
+
=
II
I
O
O
µ
.
Natomiast po odjęciu początkowych wzorów otrzymamy wzór na wartość kąta zenitalnego z, wolną
od wpływu błędu
miejsca zero:
2
360
0
+
−
=
II
I
O
O
z
W celu sprawdzenia czy w instrumencie występuje błąd miejsca zero, wybieramy w odległości ok. 100 m jednoznaczny i
niezbyt wysoko położony cel(pod kątem nie większym niż 5
O
od poziomu). Po wykonaniu odczytów O
I
i O
II
wyznaczamy wartość
błędu miejsca zero µ i kąt zenitalny z.
Błąd kolimacji-
jest to odchylenie kąta pomiędzy osią celową lunety(cc) a osią jej obrotu (hh) od prawidłowej wartości 90
0
.
Jeśli odczyty koła Hz do tego samego celu przy obu położeniach lunety nie spełniają zależności O
II
= O
I
+180
0
, a rozbieżność ta
jest większa niż podwójny błąd odczytu, wtedy należy stwierdzić, iż warunek prostopadłości cc do hh nie jest zachowany (czyli
odczyty obarczone są błędem kolimacji k). Wykonane odczyty koła poziomego obarczone są błędem kolimacji spełniają
następującą zależność:
O
I
+180
0
+ k = O
II
+ k
i błąd kolimacji odpowiednio wynosi
2
180
0
−
−
=
II
I
O
O
k
a wartość średnia z pomiarów wykonanych w 2 położeniach lunety wolna od wpływu błędu kolimacji wynosi:
2
180
0
+
+
=
II
I
śr
O
O
O
Sprawdzenie warunku cc
⊥
hh realizujemy poprzez wyznaczenie w 2 położeniach lunety kierunku poziomego do
jednoznacznego celu (cel oddalony ok. 100m i na wysokości zbliżonej do osi obrotu lunety). W oparciu o wykonane odczyty OI i
OII wyznaczamy wartość błędu kolimacji k koła poziomego.
4.3 ORIENTACJA W GEODEZYJNYM UKŁADZIE WSPÓŁRZĘDNYCH STANOWISKA(KOŁA HZ)
TACHIMETRU ELEKTRONICZNEGO
Przy pomiarach tachimetrycznych elementem który jest koniczny do wykonania prawidłowych pomiarów jest dobre
zorientowanie koła poziomego. Wykonuje się je w następujący sposób:
1. Deklarujemy stanowisko na którym wykonywane będą pomiary
2. Deklarujemy numer punktu osnowy na który orientujemy total stadion
3. Wprowadzamy współrzędne punktu osnowy
jako nawiązanie 1
(chyba że już je zna)
4. Tachimetr powinien policzyć azymut na tą osnowę i wynik przedstawić na wyświetlaczu
5. Celujemy na lustro
umieszczone w reperze
(punkt odtwarzalny typu A)
6. Po prawidłowym wycelowaniu wciskamy przycisk <SET> i tachimetr został prawidłowo zorientowany
4.4 ZASADA WYZNACZENIA WSPÓŁRZĘDNYCH, DOGODNEGO DO POMIARU, WCIĘTEGO
STANOWISKA TACHIMETRU ELOKTRONICZNEGO(TZW. „SWOBODNE STANOWISKO”) I
OCENA DOKŁADNOŚCI.
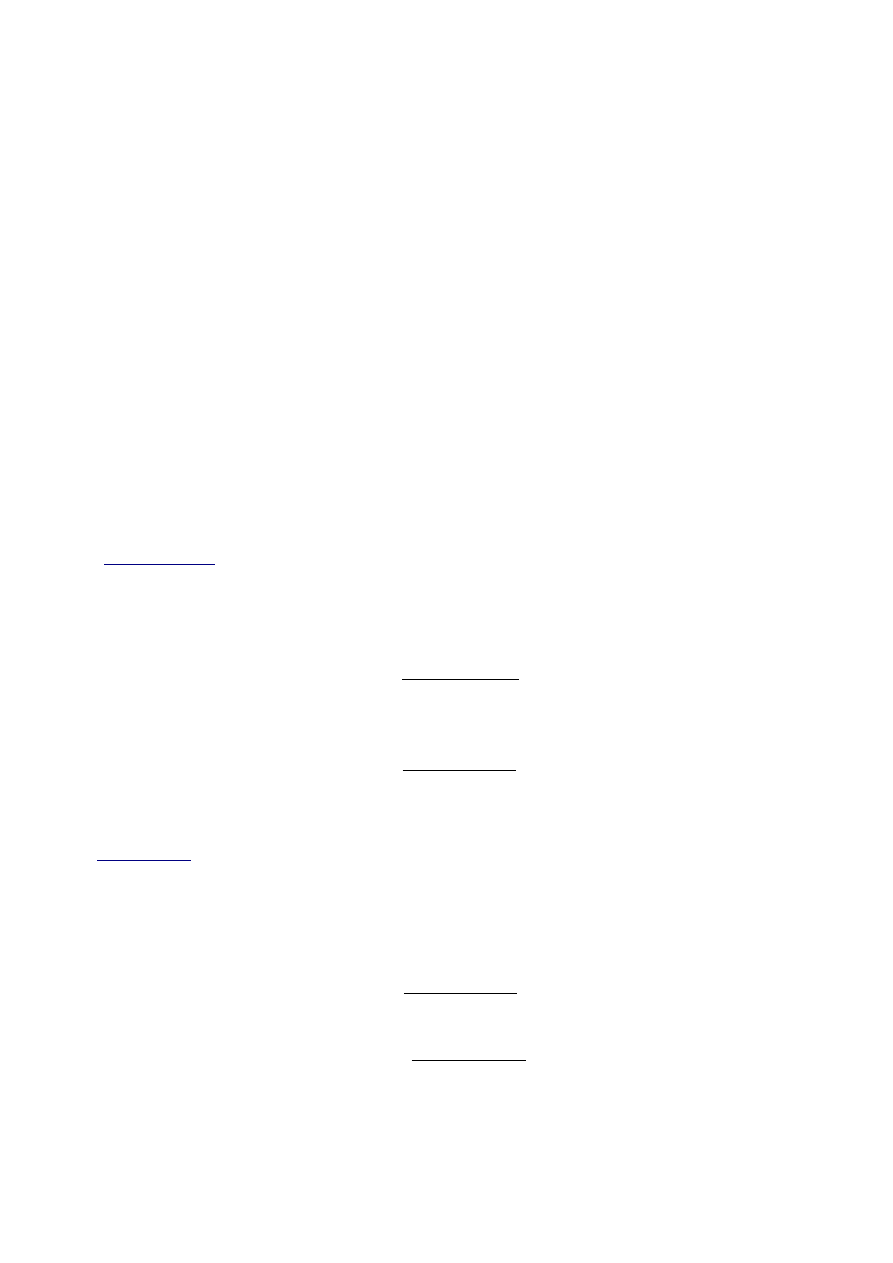
Stanowiska swobodne-
są to szczególne rodzaje wcięć, które obecnie są często wykorzystywane do uzupełniania osnowy
pomiarowej podczas pomiaru szczegółów metodą biegunową przy użyciu instrumentów typu total stadion. Stanowisko swobodne
jest dogodnie usytuowanym, niestabilizowanym punktem ustawienia tachimetru elektronicznego. Położenie tego stanowiska
można wyznaczyć kątowym wcięciem wstecz(gdy na punktach znanych nie można ustawić pryzmatu) lub wcięciem kątowo-
liniowym, dokonując pomiaru kątów poziomych lub kierunków oraz odległości do co najmniej dwóch widocznych punktów o
znanych współrzędnych. Najprostszymi konstrukcjami wykorzystywanymi do określenia współrzędnych prostokątnych
stanowiska swobodnego i dostarczającymi minimum niezbędnych obserwacji, są wcięcia pojedyncze. Każde dalsze zwiększenie
liczby obserwacji kątowych lub liniowych, wiążących stanowisko swobodne z punktami o znanych współrzędnych(rys), dostarcza
obserwacji nadliczbowych, stwarzając tym samym problem wyrównania oraz możliwość dokonania oceny dokładności poprzez
obliczenie średniego błędu położenia punktu.
Obliczenie i wyrównanie stanowisk
Wcięcia zawierające kąty i długości w ilości nadliczbowej wyrównujemy metodą pośredniczącą jako sieci kątowo-
liniowe, przy zastosowaniu postępowania pokazanego na przykładzie kątowo-liniowego wcięcia wstecz do trzech punktów
znanych(rys.9.28.b), zawierającego trzy spostrzeżenia nadliczbowe.
Ocena dokładności
[ ]
u
n
VV
m
o
−
=
11
Q
m
m
o
x
=
22
Q
m
m
o
y
=
Q - współczynniki wagowe
Pytanie 5
5.1 Od Weroniki
W metodzie trzech statywów stanowiska instrumentu znajdują się na punktach wierzchołkowych ciągu. Pozwala to na
jednoczesne wykonanie pomiaru sytuacyjnego i wysokościowego. Dogodnym rozwiązaniem jest przy tym wykorzystanie
tachimetru elektronicznego który przy jednorazowym wycelowaniu na reflektor zwrotny umożliwia równoległy pomiar: kierunku
poziomego, kąta pionowego, odległości skośnej i poziomej. Na każdym stanowisku należy także pomierzyć wysokość instrumentu
i sygnałów na obu sąsiednich stanowiskach.
Podczas stosowania dalmierzy lub dokładniejszych tachimetrów, znaczne obniżenie wpływów błędów centrowania i
mimośrodowego ustawienia instrumentu oraz sygnałów a tym samym zwiększenie dokładności pomiaru można uzyskać poprzez
równoczesne prowadzenie obserwacji kątowych i liniowych z wykorzystaniem metody trzech statywów. Jej nazwa pochodzi od
ustawionych na co najmniej trzech sąsiednich punktach ciągu sytuacyjnego lub sytuacyjno – wysokościowego dopasowanych
statywów i spodarek, do których w zależności od wykonywanych czynności i położenia instrumentu można zakładać: pionownik
optyczny, teodolit/tachimetr, lub tarcze celownicze. Wszystkie te przyrządy powinny być zakończone jednakowymi czopami
osiowymi, pasującymi dotlej spodarek. Komplety fabryczne tarcz celowniczych i spodarek do metod trzech statywów posiadają
zazwyczaj właśnie piony optyczne wbudowane w tarcze lub spodarki. W razie braku takich pionów konieczne jest centrowanie
każdego statywu za pomocą przenośnego pionownika optycznego, pionu drążkowego, a w ostateczności samego teodolitu z
wbudowanym pionem optycznym. Dokładność centrowania statywów ze spodarkami powinna mieścić się w granicach od 0,5 mm
do 1 mm.
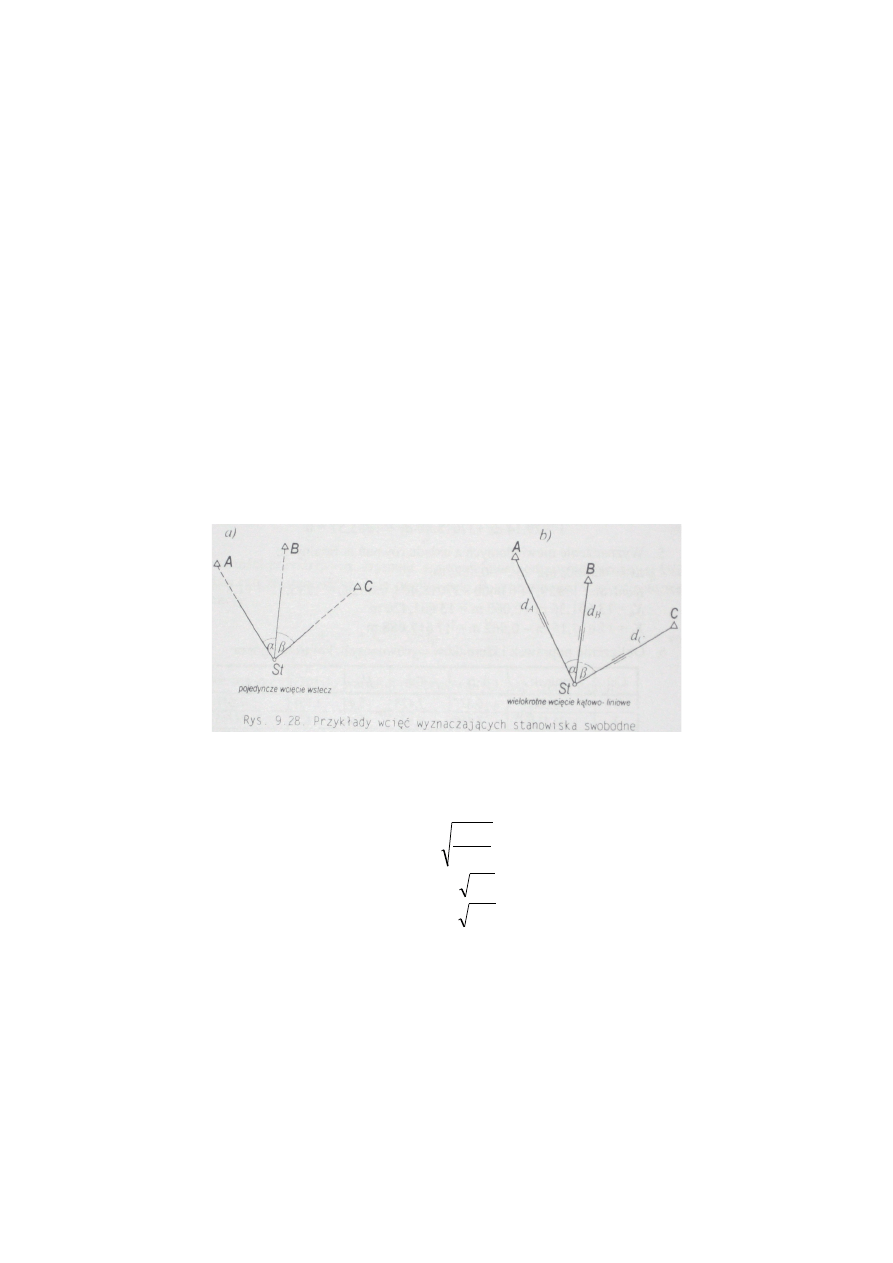
Omówienie wykonania pomiarów.
Trzy statywy ze spodarkami stanowią minimum wyposażenia niezbędnego do zrealizowania metody trzech statywów (jednak
można korzystać z czterech lub pięciu statywów co usprawni, przyspieszy i zwiększy dokładność pomiaru). Pomiar rozpoczyna się
od ustawienia i wycentrowania trzech statywów ze spodarkami, z których pierwszy umieszcza się na danym stanowisku n zaś dwa
pozostałe na sąsiadujących punktach ciągu: n + 1, n – 1. następnie do spodarek umieszczonych na skrajnych statywach zakłada się
tarcze celownicze lub reflektory zwrotne, zaś na środkowym – instrument. Tarcze, pryzmaty powinny być przy tym ustawione
prostopadle do osi celowej instrumentu. Po wycelowaniu ze stanowiska n na tarczę na punkcie poprzednim n – 1, a potem na
punkcie następnym n + 1, należy dokonać zapisu lub rejestracji odczytów: kół poziomego i pionowego teodolitu oraz odległości:
d
n-1,n
, d
n,n+1
. Jeśli nie dysponujemy dostatecznie dokładnym dalmierzem, wówczas długości obydwu boków trzeba pomierzyć
bezpośrednio. Dla określenia wysokości punktów ciągu konieczny jest także pomiar wysokości: instrumentu i
n
oraz sygnałów s
n-1
,
s
n+1
. Po dokonaniu obserwacji na stanowisku n należy przygotować się do pomiaru z następnego stanowiska obserwacyjnego w
punkcie n+1. Pozostawiamy wiec na punkcie n statyw ze spodarką zaś instrument przenosimy na kolejne stanowisko n+1
dokonując tam w spodarce zmiany tarczy/pryzmatu na teodolit. Wyjętą tarczę przekładamy na punkt n i umieszczamy ja w
uprzednio zwolnionej tulei spodarki. Z punktu n-1 zabieramy natomiast cały zestaw tj. statyw wraz ze spodarką i tarczą po czym
przenosimy go na punkt n+2 gdzie dokonujemy poziomowania oraz centrowania statywu i tarczy. Po każdej zmianie stanowiska
pomiarowego przemieszczamy wiec tylko jeden statyw ze spodarką i tarczą nie zmieniając wcześniejszego ustawienia pozostałych
statywów i spodarek, co stanowi istotę tzw. centrowania wymuszonego.
5.2 Uzupełnienie od Pawła
Metoda trzech statywów
W celu ograniczenia do minimum wpływu przypadkowych błędów centrowania teodolitu i sygnałów na błąd pomiaru kątów
poziomych (rozdział 6.6.3), do pomiarów kątów poligonowych stosuje się metodę trzech statywów. Do pomiaru kątów omawianą
metodą konieczny jest komplet przyrządów złożony z teodolitu, dwóch sygnałów tarczowych wyposażonych w piony optyczne
oraz trzech statywów — stąd nazwa metody. W praktyce przeważnie używa się większej liczby statywów i sygnałów tarczowych.
Wykorzystuje się tu możliwość jednoznacznego ustawiania w typowej spodarce: teodolitu, tarczy sygnałowej, wymiennego pionu
optycznego (jeśli tarcze sygnałowe nie są wyposażone w piony optyczne).
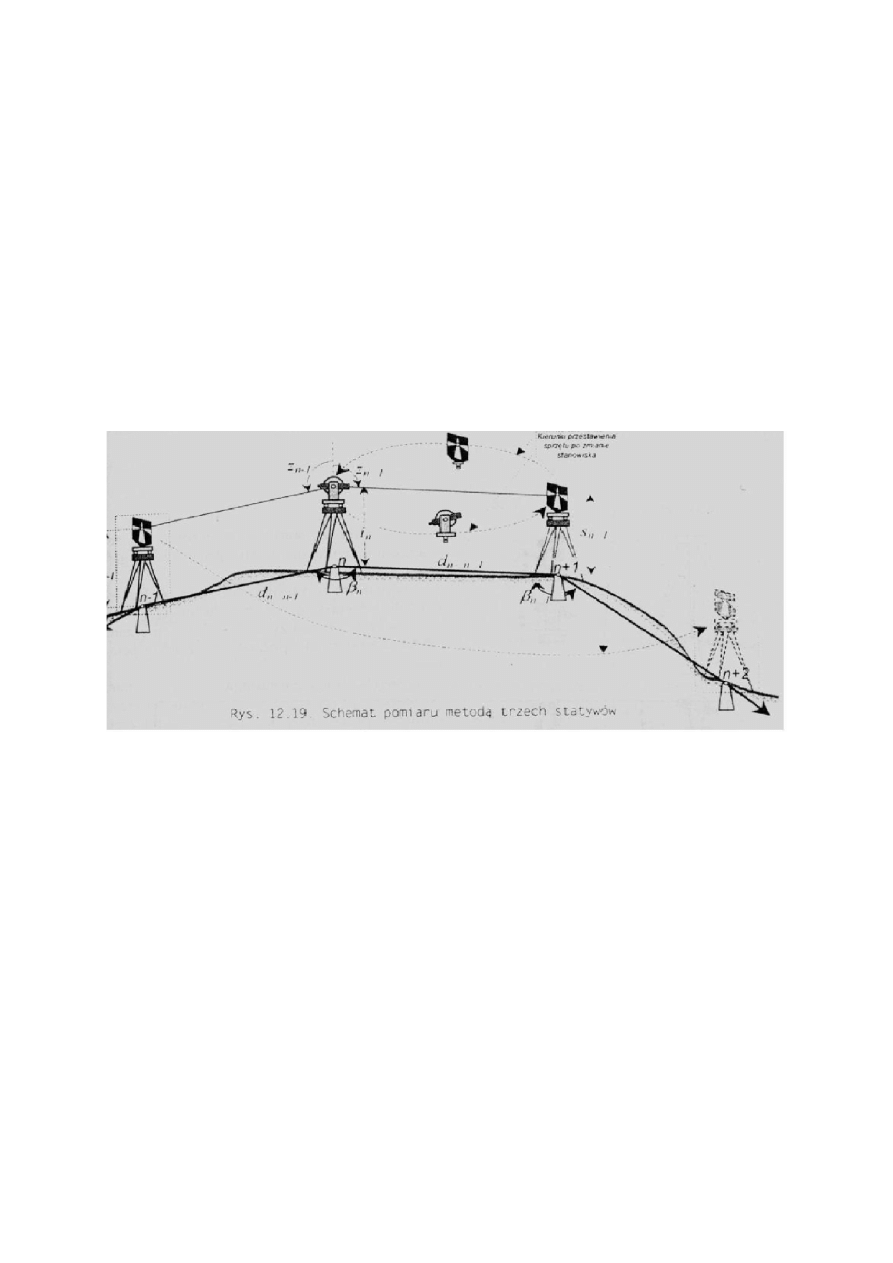
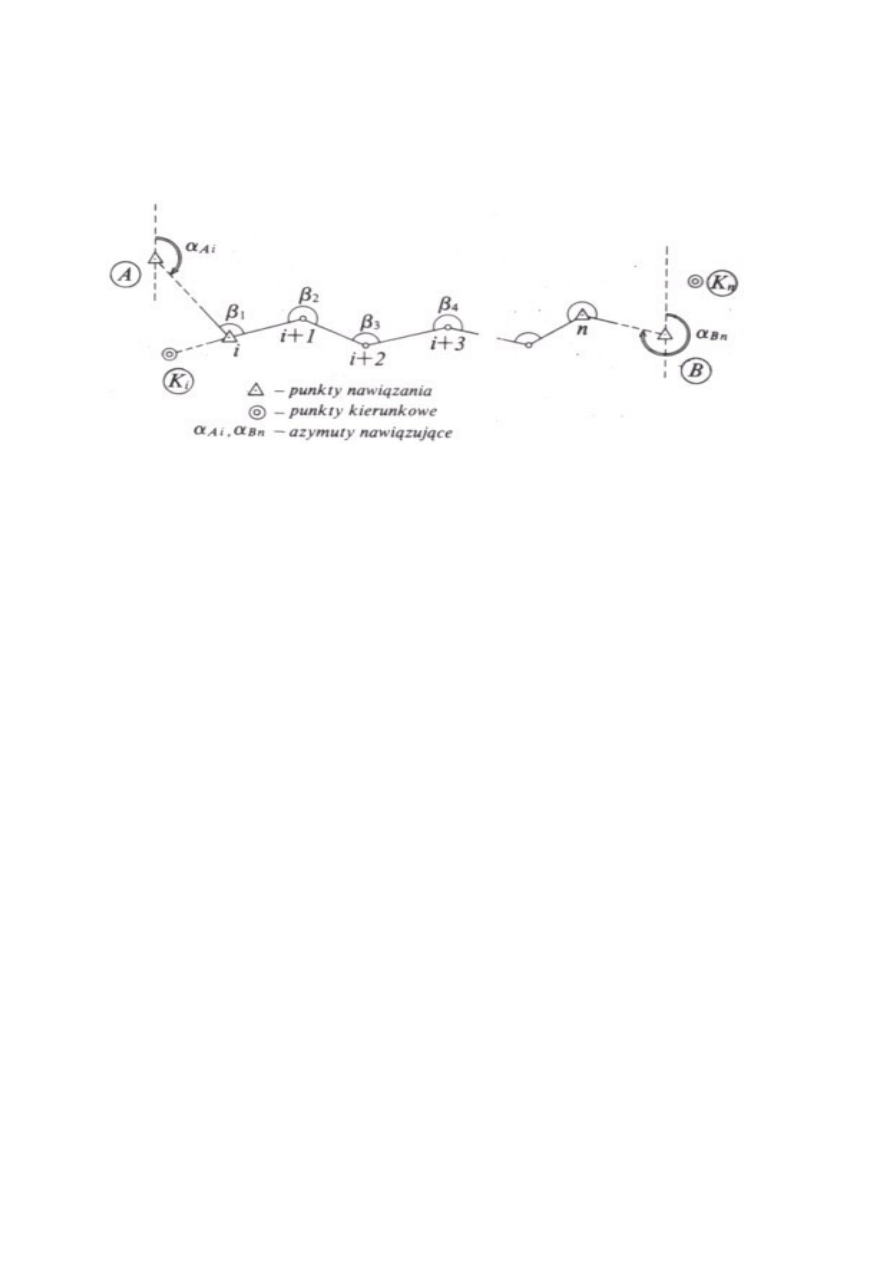
Punkty A, i, B oraz n (rys. 6.8) są to punkty osnowy wyższej klasy, do których nawiązuje się dany ciąg kątowo i liniowo
(obustronnie całkowicie). Jeśli ze stanowiska naziemnego punktu i nie widać punktu A, to w celu nawiązania kątowego ciągu do
punktów wyższej klasy mierzy się kierunek do punktu kierunkowego K
i
Na punkcie A lub na punkcie K, kierunkowym punktu i ustawia się statyw z sygnałem, a na punkcie i ustawia się statyw z
teodolitem, scentrowane i spoziomowane nad centrem punktu A (lub kierunkowym) oraz nad centrem punktu i. Na kolejnych
punktach i + 1, i + 2 ... (rys. 6.8) ciągu poligonowego ustawia się statywy z typowymi spodarkami i poziomuje sieje oraz ustawia
nad punktami za pomocą pionów optycznych. Do spodarki spoziomowanej i ustawionej nad centrem punktu i + 1 wstawia się
sygnał. Po zmierzeniu kąta β
1
w określonej liczbie serii na punkcie i, ostrożnie wyjmuje się teodolit ze spodarki i wstawia na jego
miejsce tarczę sygnałową. Teodolit przenosi się i wstawia na miejsce tarczy sygnałowej wyjętej ze spodarki ustawionej na punkcie
i + 1. Sygnał tarczowy z punktu i + 1 przenosi się i wstawia w spodarkę ustawioną na statywie oraz spoziomowaną i scentrowaną
nad punktem i + 2. Statyw z punktu A (lub z punktu kierunkowego) przenosi się ze spodarką i tarczą sygnałową na punkt i + 3,
gdzie poziomuje się i centruje spodarkę. Po przeniesieniu teodolitu i tarcz sygnałowych mierzy się kąt β
2
. Tak postępuje się aż do
zmierzenia wszystkich kątów w poligonie. Jeśli zaś z ostatniego punktu poligonu n, który jest punktem wyższej klasy nie widać
punktu B, to kierunek nawiązujący ciąg do osnowy wyższej klasy mierzymy do punktu K
n
kierunkowego punktu n.
Łatwo zauważyć, że w tej metodzie pomiaru kątów oś pionowa teodolitu ustawianego na każdym punkcie będzie się
pokrywała z osią pionową sygnału tarczowego, ustawianego na tym samym punkcie, w granicach dokładności obróbki
mechanicznej. W konsekwencji płaszczyzny pionowe przechodzące przez oś teodolitu i sygnału przy pomiarze wzdłuż każdej
celowej w kierunku „tam" i „z powrotem" będą się pokrywały w granicach dokładności obróbki mechanicznej osi pionowych
przyrządów. A więc praktycznie rzuty poziome kierunków „tam" i „z powrotem" wzdłuż każdej celowej ciągu będą się pokrywały.
Możemy więc uważać, że kąty pomierzone metodą trzech statywów wolne są od wpływów błędów centrowania, z tym że
wierzchołki kątów nie pokrywają się ściśle z centrami punktów poligonowych, są one oddalone od właściwych punktów o
wielkości wynikające z dokładności scentrowania spodarek nad centrami.
Metoda trzech statywów wymaga stosunkowo dużego zespołu pomiarowego — minimum trzech dobrze przeszkolonych
pomiarowych. Stosowanie jednak tej metody pozwala na znaczne przyspieszenie pomiaru kątów. Omawiana metoda jest
szczególnie efektywna w wypadku jednoczesnego pomiaru kątów oraz odległości za pomocą sprzężonego z teodolitem dalmierza
elektrooptycznego (nasadzanego na lunetę teodolitu).
Oczywiście wielkie THX dla wszystkich, który mieli udział przy opracowywaniu pytań:
Paulina, Weronika, Piotrek, Sławek, Paweł, Jurek
Pytania 6 i 7 nie są opracowane ponieważ dotyczą pracy z programami C-Geo i Geo-Info. Raczej trudno pisać krok po kroju co klikaćJ
Wyszukiwarka
Podobne podstrony:
kolokwium fit semestr III, Geodezja, III semestr, Fotka
KOLOKWIUM POPRAWKOWE, Studia, Geodezja, I semestr, GPSZ, Kolokwia
Pierwsze kolokwium, Studia, Geodezja, I semestr, GPSZ, Kolokwia
EGZAMIN SESYJNY NORMALNY, Studia, Geodezja, I semestr, GPSZ, Kolokwia
Biochemia - kolokwium[1], Studia, Semestr III, Biochemia, Wykłady
NOM ( I kolokwium II semestr) opracowane przez Piaska, Politechnika Poznańska ZiIP, II semestr, nom
Biotechnologia - Kolokwium 2(1), Ogrodnictwo, Semestr VII, Biotechnologia
TiG pytania kolokwium, Geodezja i Geoinformatyka UWM, III rok, TiG
Budownictwo wodne kolokwium 2, STUDIA, semestr 5, Podstawy Budownictwa Wodnego
I KOLOKWIUM NR I SEMESTR III (V), POP
TiF opracowanie, Geodezja, semestr VI, Fotogrametria i teledetekcja II
zoologia kolokwia dzienne(1), Semestr 1, zoologia, kolokwia, kolokwium 1
Zagadnienia na 1 kolokwium, Studia, Semestr III, Biochemia, Kolos 1
ORGANIZACJA PRODUKCJI FILMOWEJ, kolokwium- Gębicka I semestr, Producent- to podmiot, który inicjuje,
Wyniki, Kolokwium II semestr II
kolokwia, II semestr id 240233 Nieznany
Dendrologia opracowane pytania na kolokwium 1, Ogrodnictwo, Semestr II, Dendrologia
więcej podobnych podstron