
1
Rozwiązywanie algebraicznych
układów równań liniowych
metodami bezpośrednimi

2
Plan wykładu:
1. Definicje macierzy, norm etc.
2. Metoda eliminacji Gaussa, Jordana
3. Rozkład LU metodą Gaussa
4. Układy równań z macierzą symetryczną. Rozkłady: LDL
T
, LL
T
5. Układy równań z macierzą trójdiagonalną
6. Iteracyjne poprawianie rozwiązań
7. Układy liniowe nadokreślone, układ normalny równań, metody
ortogonalizacji
3
Pojęcia podstawowe
Macierz jest uporządkowanym układem
mxn liczb rzeczywistych lub zespolonych
A=(a
ij
) (i=1,..,m; j=1,...,n)
Jeśli m=n to A jest kwadratowa stopnia n.
Macierz diagonalna D=(
ij
d
ij
)
Macierz jednostkowa I=(
ij
)
A
m
£n
=
2
6
6
4
a
11
a
12
: : :
a
1n
a
21
a
22
: : :
a
2n
: : :
: : :
: : :
: : :
a
m1
a
m2
: : :
a
mn
3
7
7
5
D =
2
6
6
4
d
1
0
: : :
0
0
d
2
: : :
0
: : :
: : :
: : :
: : :
0
0
: : :
d
n
3
7
7
5
(A
T
)
T
= A
(®A)
T
= ®A
T
(A + B)
T
= A
T
+ B
T
(AB)
T
= B
T
A
T
(Ax)
T
= x
T
A
T
Transpozycja - A=(a
ij
) to A
T
=(a
ji
)
Ślad macierzy A=A
nxn
tr(A) =
n
X
i=1
a
ii
tr(A
T
) = tr(A)

4
Jeśli
to macierz jest
nieosobliwa
i dla takiej macierzy
istnieje macierz odwrotna A
-1
Macierz symetryczna
Macierz ortogonalna Q=Q
m
x
n
Macierz idempotentna
det(A)
6= 0
AA
¡1
= A
¡1
A = I
(AB)
¡1
= B
¡1
A
¡1
A
T
= A
Q
T
Q = I
Macierz trójkątna lewa (dolna)
Macierz trójkątna prawa (górna)
Sumy, iloczyny i odwrotności macierzy trójkątnych
tego samego rodzaju są macierzami trójkątnymi.
Wyznacznik macierzy trójkątnej
L =
2
6
6
4
l
11
0
: : :
0
l
21
l
22
: : :
0
: : :
: : :
: : :
: : :
l
n1
l
n2
: : :
l
nn
3
7
7
5
R =
2
6
6
4
r
11
r
12
: : :
r
1n
0
r
22
: : :
r
2n
: : :
: : :
: : :
: : :
0
0
: : :
r
nn
3
7
7
5
det(L) = l
11
l
22
: : : l
nn
det(R) = r
11
r
22
: : : r
nn
det(A) = det(A
T
)
det(AB) = det(A)det(B)
Q
¡1
Q = I
Q
T
= Q
¡1
A
2
= A
5
Macierzą hermitowską nazywamy macierz, która
po transpozycji i sprzężeniu zespolonemu jej
elementów jest równa macierzy pierwotnej
Elementy diagonalne macierzy hermitowskiej są
rzeczywiste (pozostałe mogą być zespolone lub
rzeczywiste).
Macierzą dodatniookreśloną nazywamy macierz
rzeczywistą lub hermitowską o własności:
Macierz dodatnio określona jest zawsze odwracalna.
Macierz odwrotna jest
również dodatnio określona.
Przestrzenią liniową (wektorową) nad ciałem
liczb rzeczywistych (zespolonych) nazywamy zbiór
obiektów (wektorów) z określonym działaniem
dodawania elementów przestrzeni oraz mnożenia ich
przez liczbę i oznaczamy R
N
(C
N
).
Aksjomaty: łączność, przemienność, element
neutralny, element odwrotny,....
A
H
=
¡
A
T
¢
¤
x
T
Ax > 0;
x
2 R
n
;
x
6= 0
Uporządkowany zbiór liczb rzeczywistych
(zespolonych) tworzy wektor
Przestrzeń wektorowa będąca zbiorem takich
obiektów ma wymiar n.
Dowolny zbiór n wektorów liniowo niezależnych w
R
N
tworzy bazę przestrzeni. Każdy element
przestrzeni można zapisać jako kombinację
liniową elementów bazy
Podprzestrzeń linową R w R
N
tworzy zbiór
wszystkich wektorów
Macierz możemy traktować jako obiekt
zbudowany z wektorów ( wektory wierszowe lub
kolumnowe).
Rzędem macierzy A=A
mxn
r=rank(A)
nazywamy największą liczbę niezależnych liniowo
wektorów wierszowych lub kolumnowych. Jeśli
r=m=n to macierz jest nieosobliwa.
x = (x
1
; x
2
; x
3
; : : : ; x
n
)
y
1
; y
2
; : : : ; y
n
x = ®
1
y
1
+ ®
2
y
2
+ : : : + ®
n
y
n
y
1
; y
2
; : : : ; y
k
;
k
· n
6
Normy wektorów i macierzy
Normy wprowadza się w celu ilościowego
określania własności wektorów i macierzy.
Normą wektora nazywamy funkcję, która
każdemu elementowi w R
N
przyporządkowuje liczbę
rzeczywistą. Dla dowolnych
norma wektora musi spełniać następujące
aksjomaty:
Dla n-wymiarowego wektora
najczęściej stosowane są normy z rodziny L
P
:
- norma pierwsza
- norma druga (euklidesowa)
- norma maksymalna
Dla dowolnego wektora x w przestrzeni R
n
prawdziwe są poniższe relacje pomiędzy normami:
Normy macierzy
Własności norm macierzy
Normy zgodne
– norma macierzy indukowana
przez normę wektora
x = [x
1
; x
2
; : : : ; x
n
]
T
jjxjj
p
= (
jx
1
j
p
+
jx
2
j
p
+ : : :
jx
n
j
p
)
1
p
p =
1;
kxk
1
= max
fjx
1
j; jx
2
j; : : : ; jx
n
jg
x; y
2 R
n
®
2 R
jjxjj ¸ 0;
jjxjj = 0 () x = 0
jj®xjj = j®j ¢ jjxjj
jjx + yjj · jjxjj + jjyjj
kxk
1
· kxk
2
· kxk
1
·
p
n
kxk
2
· nkxk
1
p = 2;
kxk
2
= (x
2
1
+ x
2
2
+ : : : + x
2
n
)
1=2
p = 1;
kxk
1
=
jx
1
j + jx
2
j + : : : + jx
n
j
jjAjj ¸ 0;
jjAjj = 0 () A = 0
jj®Aj = j®j ¢ jjAjj
jjA + Bjj · jjAjj + jjBjj
jjABjj · jjAjj ¢ jjBjj
jjAxjj · jjAjj ¢ jjxjj(normy zgodne)

7
Macierz o m wierszach i n kolumnach można
traktować jako operator liniowy przekształcający
przestrzeń R
m
w R
n
. Normę takiej macierzy można
określić przy użyciu wektorów:
gdzie: p i q oznaczają normy wektorów w
przestrzeniach R
n
i w R
m
. Mówimy, że norma ||A||
pq
jest normą indukowaną przez normy ||.||
p
oraz ||.||
q
.
Dla p=q oznaczając
możemy określić następujące normy macierzy
- maksymalna suma modułów w kolumnie
- norma spektralna
kAk
p
=
kAk
pq
kAk
1
=
max
j=1;2;:::;n
m
X
i=1
ja
ij
j
kAk
2
= ( max
i=1;:::;n
¸
i
(AA
T
))
1=2
kAk
1
=
max
i=1;2;:::;n
n
X
j=1
ja
ij
j
kAk
1
1
= max
i;j
ja
ij
j
- maksymalna suma modułów w wierszu
- maksymalny moduł elementu
W przestrzeniach z normą ||
⋅||
2
często używa się
euklidesowej (Frobeniusa)
normy macierzy:
która nie jest indukowana żadną normą ale spełnia
ona z normą ||
⋅||
2
warunek zgodności:
Normy macierzy mają istotne znaczenie w analizie
błędów (np. błędów rozwiązania układów równań
liniowych).
kAk
E
=
v
u
u
t
m
X
i=1
n
X
j=1
a
2
ij
kAk
2
· kAk
E
kxk
2
;
x
2 R
n
kAk
pq
= sup
x
2Rn
x
6=0
kAxk
q
kxk
p
8
Szukamy rozwiązania układu równań liniowych w
postaci:
Powyższy układ równań można zapisać w postaci
macierzowej:
gdzie:
- macierz współczynników układu
- szukany wektor - wektor wyrazów
rozwiązań wolnych
a
11
x
1
+ a
12
x
2
+ : : : + a
1n
x
n
=
b
1
a
21
x
1
+ a
22
x
2
+ : : : + a
2n
x
n
=
b
2
: : : : : : : : : : : : : : : : : : : : : : : : : : :
=
: : :
a
n1
x
1
+ a
n2
x
2
+ : : : + a
nn
x
n
=
b
n
Ax = b
A =
2
6
6
4
a
11
a
12
: : :
a
1n
a
21
a
22
: : :
a
2n
: : :
: : :
: : :
: : :
a
n1
a
n2
: : :
a
nn
3
7
7
5
x =
2
6
6
6
4
x
1
x
2
..
.
x
n
3
7
7
7
5
b =
2
6
6
6
4
b
1
b
2
..
.
b
n
3
7
7
7
5
Warunek rozwiązywalności układu niejednorodnego:
R(A) – podprzestrzeń liniowa rozpięta na wektorach
kolumnowych macierzy A
Dla
warunek rozwiązywalności układu jest spełniony dla
każdego b i rozwiązanie ma postać
Jeśli rank(A)=r<n to rozwiązania tworzą rozmaitość
(n-r) wymiarową.
b
2 R(A)
R(A) = R
n
x = A
¡1
b
9
Układ równań z macierzą trójkątną
Zakładamy, że elementy leżące na diagonali są niezerowe.
Rozwiązanie układu można znaleźć posługując się wzorem
rekurencyjnym, zaczynając od elementu x
n
:
W celu wyznaczenia wszystkich składowych wektora rozwiązania
x należy wykonać:
- M operacji mnożenia i dzielenia
- D operacji dodawania i odejmowania
a
11
x
1
+ a
12
x
2
+ : : : + a
1n
x
n
=
b
1
a
22
x
2
+ : : : + a
2n
x
n
=
b
2
: : : : : : : : : : : :
: : :
: : :
a
nn
x
n
=
b
n
M =
1
2
n
2
+
1
2
n
D =
1
2
n
2
¡
1
2
n
x
n
=
b
n
a
nn
x
i
=
b
i
¡ a
ii+1
x
i+1
¡ : : : ¡ a
in
x
n
a
ii
10
Uwarunkowanie zadania - rozwiązania
układu równań
Wpływ błędów zaokrągleń na wynik można
oszacować analizując zaburzenia danych: A,b
a) zaburzamy wektor b:
b) zaburzamy elementy macierzy A:
ostatnią nierówność zapisujemy w postaci
A(x + ±x)
=
b + ±b
±x
=
A
¡1
±b
jj±xjj · jjA
¡1
jj ¢ jj±bjj
(A + ±A)(x + ±x) = b
A±x + ±A(x + ±x) = 0
±x =
¡A
¡1
±A(x + ±x)
jj±xjj · jjA
¡1
jj ¢ jj±Ajj ¢ jjx + ±xjj
jj±xjj
jjx + ±xjj
· ·(A)
jj±Ajj
jjAjj
·(A) =
jjAjj ¢ jjA
¡1
jj
gdzie
jest
wskaźnikiem uwarunkowania macierzy
Korzystając z wyniku (a) oraz nierówności
dostajemy oszacowanie na błąd względny
rozwiązania:
Wniosek - duży wskaźnik uwarunkowania macierzy
może powodować duże względne zaburzenia
rozwiązania nawet dla małych zaburzeń wektora
danych. Zadanie jest wówczas
źle uwarunkowane
.
jjbjj = jjAxjj · jjAjj ¢ jjxjj
jj±xjj
jjxjj
· ·(A)
jj±bjj
jjbjj
11
Metoda eliminacji Gaussa rozwiązania układu
równań liniowych. Metoda jest dwuetapowa:
1) Eliminacja zmiennych. Układ pierwotny:
Odejmujemy od i-tego wiersza (i=2,3,...,n) wiersz
pierwszy pomnożony przez współczynnik
Z równań i=2,3,..,n wyeliminowana została
zmienna x
1
.
a
(1)
11
x
1
+ a
(1)
12
x
2
+ : : : + a
(1)
1n
x
n
=
b
(1)
1
a
(1)
21
x
1
+ a
(1)
22
x
2
+ : : : + a
(1)
2n
x
n
=
b
(1)
2
: : : : : : : : : : : : : : : : : : : : : : : : : : :
=
: : :
a
(1)
n1
x
1
+ a
(1)
n2
x
2
+ : : : + a
(1)
nn
x
n
=
b
(1)
n
A
(1)
x = b
(1)
l
i1
=
a
(1)
i1
a
(1)
11
A
(2)
x = b
(2)
a
(2)
11
x
1
+ a
(2)
12
x
2
+ : : : + a
(2)
1n
x
n
=
b
(2)
1
a
(2)
22
x
2
+ : : : + a
(2)
2n
x
n
=
b
(2)
2
: : : : : : : : : : : : : : : : : : : : :
=
: : :
a
(2)
n2
x
2
+ : : : + a
(2)
nn
x
n
=
b
(2)
n
Powtarzamy operację, ale odejmujemy od i-tego
wiersza (i=3,4,...,n) wiersz drugi pomnożony przez
współczynnik
Postępując dalej w ten sposób eliminujemy z
każdego następnego równania jedną zmienną.
Eliminację kończymy po (n-1) krokach, gdy
uzyskamy trójkątny układ równań w postaci:
l
i2
=
a
(2)
i2
a
(2)
22
A
(n)
x = b
(n)
a
(n)
11
x
1
+ a
(n)
12
x
2
+ : : : + a
(n)
1n
x
n
=
b
(n)
1
a
(n)
22
x
2
+ : : : + a
(n)
2n
x
n
=
b
(n)
2
: : : : : : : : : : : :
=
: : :
a
(n)
nn
x
n
=
b
(n)
n
12
2) Etap drugi nazywany jest
postępowaniem odwrotnym.
Rozwiązanie (kolejne składowe wektora x)
znajdujemy stosując wzór rekurencyjny dla
macierzy trójkątnej. Wyznaczenie rozwiązania
metodą Gaussa wymaga wykonania:
- M op. mnożenia i dzielenia
- D op. dodawania i odejmowania
Metoda eliminacji w tej postaci jest niestabilna
numerycznie – problem dzielenia przez 0 lub
liczbę bliską zeru. Rozwiązanie:
a) częściowy wybór elementów głównych
b) pełny wybór elementów głównych
Częściowy wybór elementów głównych
W k-tym kroku szukamy elementu
i przestawiamy wiersze r oraz k.
M =
1
3
n
3
+ n
2
¡
1
3
n
D =
1
3
n
3
+
1
2
n
2
¡
5
6
n
ja
(k)
rk
j = max
k
·i·n
ja
k
ik
j
Pełny wybór elementów głównych
W k-tym kroku szukamy elementu
i przestawiamy wiersze: k i r oraz kolumny: k i s
ja
(k)
rs
j = max
k
·i;j·n;
ja
k
ij
j
r
k
r
k
s
k
13
Stosując wybór elementu głównego
rozwiązanie otrzymujemy zawsze.
W trakcie wyboru elementu głównego należy
zmienić także kolejność w x i b.
Modyfikacji tej można nie stosować dla:
a) macierzy z dominującą przekątną
b) macierzy symetrycznej i jednocześnie
dodatniookreślonej
Metoda eliminacji Jordana
(eliminacji zupełnej)
W układzie równań:
równanie pierwsze dzielimy obustronnie przez
współczynnik:
ja
ii
j ¸
n
X
j=1;j
6=i
ja
i;j
j (i = 1; : : : ; n)
a
(1)
11
x
1
+ a
(1)
12
x
2
+ : : : + a
(1)
1n
x
n
=
b
(1)
1
a
(1)
21
x
1
+ a
(1)
22
x
2
+ : : : + a
(1)
2n
x
n
=
b
(1)
2
: : : : : : : : : : : : : : : : : : : : : : : : : : :
=
: : :
a
(1)
n1
x
1
+ a
(1)
n2
x
2
+ : : : + a
(1)
nn
x
n
=
b
(1)
n
w
1
= a
(1)
11
Następnie odejmujemy od i-tego wiersza (i=2,3,...,n)
wiersz pierwszy przemnożony przez
i otrzymujemy
Podobnie postępujemy z równaniem drugim. Dzielimy
je przez
Następnie od i-tego wiersza (i=1,3,4,...,n)
odejmujemy wiersz drugi pomnożony przez
współczynnik:
w
1i
= a
(1)
i1
x
1
+ a
(2)
12
x
2
+ : : : + a
(2)
1n
x
n
=
b
(2)
1
a
(2)
22
x
2
+ : : : + a
(2)
2n
x
n
=
b
(2)
2
: : : : : : : : : : : : : : : : : : : : :
=
: : :
a
(2)
n2
x
2
+ : : : + a
(2)
nn
x
n
=
b
(2)
n
A
(2)
x = b
(2)
A
(1)
x = b
(1)
w
2
= a
(2)
22
w
2i
= a
(2)
i2
14
Otrzymujemy zmodyfikowany układ równań:
Po przeprowadzeniu (n-1) eliminacji zmiennych
układ równań ma poniższą postać:
czyli gotowe rozwiązanie. Liczba operacji:
A
(3)
x = b
(3)
x
1
+ 0
¢ x
2
+ a
(3)
13
x
3
+ : : : + a
(3)
1n
x
n
=
b
(3)
1
x
2
+ a
(3)
23
x
3
+ : : : + a
(3)
2n
x
n
=
b
(3)
2
: : : : : : : : : : : : : : : : : : : : :
=
: : :
a
(3)
n3
x
3
+ : : : + a
(3)
nn
x
n
=
b
(3)
n
x
1
=
b
(n)
1
x
2
=
b
(n)
2
: : :
=
: : :
x
n
=
b
(n)
n
M =
1
2
n
3
+
1
2
n
2
D =
1
2
n
3
¡
1
2
n
2
Rozkład LU metodą Gaussa-Crouta(GCW)
Metodę Gaussa można użyć do znalezienia takich
macierzy L i U, które z macierzą A związane są
relacją:
Procedura wyznaczania elementów tych
macierzy nosi nazwę
rozkładu LU
.
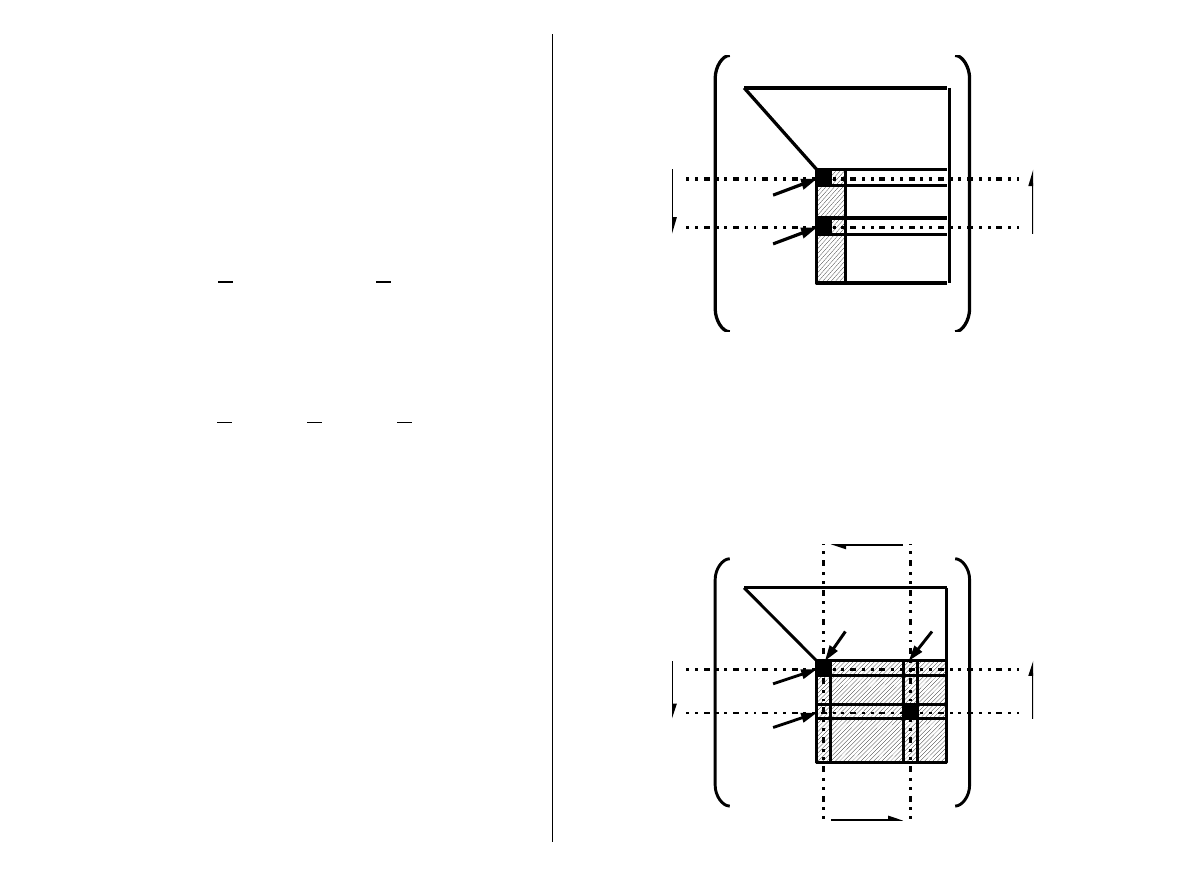
Sposób postępowania (wykorzystujemy
metodę eliminacji Gaussa):
1) mnożenie wiersza pierwszego przez
czynnik
i odjęcie go od i-tego wiersza (i=2...n),
zastępujemy mnożeniem przez macierz:
co można zapisać macierzowo:
A = L
¢ U
l
i1
=
a
(1)
i1
a
1
11
L
(1)
=
2
6
6
6
6
4
1
0
: : :
: : :
0
¡l
21
1
0
: : :
0
¡l
31
0
1
0
0
: : :
: : :
: : :
1
0
¡l
n1
0
0
: : :
1
3
7
7
7
7
5
n
£n
L
(1)
A
(1)
= A
(2)
L
(1)
b
(1)
= b
(2)

15
Macierze L
(i)
są nieosobliwe (można znaleźć dla każdej
macierz odwrotną). Przemnażając obie strony
powyższych równań przez (L
(n-1)
)
-1
, (L
(n-2)
)
-1
....,
otrzymamy:
wprowadzamy oznaczenia
Jak znaleźć macierze (L
(i)
)
-1
?
Eliminacja zmiennej z równań (i=3,4,...,n)
wygląda podobnie. Mnożymy wiersze
zmodyfikowanego układu równań o indeksach
i=3,4,...,n przez czynnik
i odejmujemy od nich wiersz drugi. Operację tą
można przeprowadzić mnożąc układ równań
obustronnie przez macierz L
(2)
:
Zapis macierzowy operacji:
Po wykonaniu (n-1) takich operacji dostajemy
l
i2
=
a
(2)
i2
a
2
2
L
(2)
A
(2)
=
A
(3)
L
(2)
b
(2)
=
b
(3)
L
(2)
=
2
6
6
6
6
4
1
0
: : :
: : :
0
0
1
0
0
: : :
0
¡l
32
1
0
0
: : :
: : :
: : :
1
0
0
¡l
n2
0
0
1
3
7
7
7
7
5
L
(n
¡1)
L
(n
¡2)
: : : L
(1)
A
(1)
=
A
(n)
L
(n
¡1)
L
(n
¡2)
: : : L
(1)
b
(1)
=
b
(n)
A
(1)
=
³
L
(1)
´
¡1
³
L
(2)
´
¡1
: : :
³
L
(n
¡1)
´
¡1
A
(n)
b
(1)
=
³
L
(1)
´
¡1
³
L
(2)
´
¡1
: : :
³
L
(n
¡1)
´
¡1
b
(n)
L
(1)
=
2
6
6
4
1
0
: : :
0
¡l
21
1
: : :
0
: : :
: : :
1
0
¡l
n1
0
: : :
1
3
7
7
5
³
L
(1)
´
¡1
=
2
6
6
4
1
0
: : :
0
l
21
1
: : :
0
: : :
: : :
1
0
l
n1
0
: : :
1
3
7
7
5
L
=
(L
(1)
)
¡1
(L
(2)
)
¡1
: : : (L
(n
¡1)
)
¡1
U
=
A
(n)
=
µ
L
(n
¡1)
L
(n
¡2)
: : : L
(1)
¶
A
(1)
A
=
L
¢ U
16
Dysponując macierzami L i U można rozwiązać układ
równań:
poprzez rozwiązanie 2 układów równań
Rozwiązanie każdego z równań wiąże się z nakładem
obliczeń jak dla układu z macierzą trójkątną (~1n
2
).
Rozkład LU (eliminacja Gaussa) to nakład rzędu
~0.5n
3
.
Sprawdzenie
macierz L jest macierzą dolną z jedynkami
na diagonali:
macierz U jest macierzą górną z
niezerowymi elementami na diagonali:
L
(i)
³
L
(i)
´
¡1
= I
L
=
(L
(1)
)
¡1
(L
(2)
)
¡1
: : : (L
(n
¡1)
)
¡1
L
=
2
6
6
6
6
4
1
0
: : :
: : :
0
l
21
1
0
: : :
0
l
31
l
32
1
0
0
: : :
: : :
: : :
1
0
l
n1
l
n2
l
n3
: : :
1
3
7
7
7
7
5
Ax = b
LU x = b
Ly = b
U =
2
6
6
6
6
4
u
11
u
12
u
13
: : :
u
1n
0
u
22
u
23
: : :
u
2n
0
0
u
33
: : :
u
nn
: : :
: : :
: : :
: : :
: : :
0
0
0
: : :
u
nn
3
7
7
7
7
5
U x = y
17
Jaki jest
wektor reszt
rozwiązania?
Norma maksymalna wektora reszt może być mała nawet
dla źle uwarunkowanych macierzy.
Zalety:
1) Duża wydajność dla dużej liczby równań. Rozkład LU
opłaca się stosować w przypadku rozwiązywania wielu
układów równań z tą samą macierzą współczynników
układu A. Każdy układ równań różni się wtedy tylko
wektorem wyrazów wolnych. Rozkład LU wykonuje się
w takim przypadku tylko raz (ilość operacji ~n
3
).
Rozwiązanie pojedynczego układu równań można
znaleźć przy zastosowaniu algorytmu postępowania
odwrotnego (ilość operacji ~n
2
).
2) Oszczędność zajmowanej pamięci. Elementy macierzy
L i U mogą zostać zapisane w macierzy A.
3) Jeśli macierz A jest symetryczna i dodatniookreślona
to nie trzeba dokonywać wyboru elementów
podstawowych.
r = b
¡ A~x = (A + ±A)~x ¡ A~x = ±A~x
jjrjj
1
=
jjb ¡ A~xjj
1
· k
2
"
jj±Ajj
1
jj~xjj
1
18
Układy równań z macierzą symetryczną.
Rozkład LDL
T
Oznaczmy rozkład LU jako:
Szukamy rozkładu macierzy A w postaci:
gdzie: L – macierz trójkątna dolna z jedynkami na
diagonali, D – macierz diagonalna z elementami
diagonalnymi macierzy , U – macierz trójkątna
górna z jedynkami na diagonali
Wykorzystujemy symetrię macierzy
co prowadzi do rozkładu dla macierzy
symetrycznych:
Rozwiązanie układu Ax=b:
A = LU
A = LDU
A = LDL
T
Elementy rozkładu wyznaczamy rekurencyjnie
a dla i=2,3,...,n oblicza się na przemian:
Nakład obliczeń:
Zalety:
- nakład obliczeń dwukrotnie mniejszy niż w GCW
- dzięki symetrii macierzy wystarczy zapamiętać
elementów
d
1
= a
11
l
ij
=
a
ij
¡
P
j
¡1
k=1
c
ik
l
jk
d
j
c
ij
= d
j
l
ij
;
j = 1; 2; : : : ; i
¡ 1
d
i
= a
ii
¡
i
¡1
X
k=1
c
ik
l
ik
M =
1
6
n
3
+ n
2
¡
7
6
n
D =
1
6
n
3
¡
1
6
n
¹
U
U
T
DL
T
= A
T
= A
) U = L
T
N =
n(n + 1)
2
Lz = b
Dy = z
L
T
x = y
19
Rozkład LL
T
(Banachiewicza-Cholesky'ego)
Jeśli macierz A jest macierzą symetryczną
dodatnio określoną wówczas można dokonać
następującego rozkładu:
Macierz L jest macierzą trójkątną dolną z
elementami na diagonali mogącymi
się różnić od 1. Macierz
spełnia warunek
więc rozkład ten nie jest jednoznaczny. Jeśli
jednak liczby na diagonali macierzy L są
dodatnie wówczas rozkład jest jednoznaczny, a
elementy macierzy wyznaczamy ze wzorów:
A = LL
T
A = ¹
L ¹
L
T
l
ii
=
v
u
u
ta
ii
¡
i
¡1
X
k=1
l
2
ik
; i = 1; 2; : : : ; n
l
ji
=
a
ji
¡
P
i
¡1
k=1
l
jk
l
ik
l
ii
; j = i + 1; i + 2; : : : ; n
Nakład obliczeń:
Przykład
n
¡ p
D =
1
6
n
3
+
1
2
n
2
+
1
3
n
A =
2
4
4
2
2
2
5
3
2
3
6
3
5
i = 1 :
l
11
= 2;
l
21
= 1;
l
31
= 1
i = 2 :
l
22
= 2;
l
32
= 1
i = 3 :
l
33
= 2
A
=
2
4
4
2
2
2
5
3
2
3
6
3
5
=
2
4
2
0
0
1
2
0
1
1
2
3
5 ¢
2
4
2
1
1
0
2
1
0
0
2
3
5
¹
L =
¡L
M =
1
6
n
3
+
1
2
n
2
¡
2
3
n
20
Inne zastosowania rozkładu LU.
Obliczanie wyznacznika
Aby obliczyć wyznacznik macierzy A możemy
posłużyć się rozkładem
Wyznacznik macierzy U jest iloczynem
elementów stojących na diagonali tej
macierzy (n-1 operacji mnożenia).
Odwracanie macierzy
Aby znaleźć przy pomocy macierzy L i U
macierz odwrotną A
-1
należy rozwiązać
n układów równań:
A = LU
det(L) = 1
det(A + E)
=
det(LU )
=
det(L)det(U ) = det(U )
LU x
(i)
= e
(i)
;
i = 1; 2; : : : ; n
e
(i)
= [0; 0; : : : ; 1; : : : ; 0]
T
Rozwiązania układów równań x
(i)
stanowią
kolumny macierzy odwrotnej A
-1
(po
uwzględnieniu ewentualnych przestawień
wierszy wynikających z wyboru elementu
podstawowego).
Przykład
Znaleźć macierz A
-1
jeśli macierz A jest
zdefiniowana:
A =
2
4
1
0
1
3
3
0
0
2
2
3
5
A
¡1
=
2
4
1
2
1
6
¡
1
4
¡
1
2
1
6
1
4
1
2
¡
1
6
1
4
3
5
P
n
=
2
4
2
3
1
3
5
L =
2
4
1
0
0
0
1
0
1
3
¡
1
2
1
3
5 U =
2
4
3
3
0
0
2
2
0
0
2
3
5
x
(1)
=
2
4
1=6
1=6
¡1=6
3
5 x
(2)
=
2
4
¡1=4
1=4
1=4
3
5
x
(3)
=
2
4
1=2
¡1=2
1=2
3
5
LU X = I
! X = A
¡1

21
Układy równań z macierzą trójdiagonalną
Szukamy rozwiązania układu równań:
Zdarza się że macierz układu równań ma postać (np.
równania z ilorazami różnicowymi):
Można wykonać rozkład LU macierzy T, macierze te
mają postać:
L =
2
6
6
6
6
6
6
6
6
4
1
l
2
1
0
l
3
1
. .. ...
0
. .. ...
l
n
1
3
7
7
7
7
7
7
7
7
5
U =
2
6
6
6
6
6
6
6
6
4
u
1
c
1
u
2
c
2
0
u
3
c
3
. .. ...
0
. ..
c
n
¡1
u
n
3
7
7
7
7
7
7
7
7
5
Elementy macierzy rozkładu obliczamy
rekurencyjnie:
Rozwiązanie układu Tx=b:
l
i
=
a
i
u
i
¡1
U x = y
T x = b
T =
2
6
6
6
6
6
6
6
6
4
d
1
c
1
a
2
d
2
c
2
a
3
d
3
c
3
. .. ... ...
. .. ...
c
n
¡1
a
n
d
n
3
7
7
7
7
7
7
7
7
5
u
1
= d
1
u
i
= d
i
¡ l
i
c
i
¡1
;
i = 2; 3; : : : ; n
Ly = b
22
Rozwiązanie:
nakład obliczeń: M=2n-2, D=n-1
liczba zajętych komórek: P=3n-2
Jeśli macierz jest
dominująca kolumnowo
to
rozkład T=LU jest równoważny rozkładowi z
częściowym wyborem elementu podstawowego
(niezawodność metody).
Iteracyjne poprawianie rozwiązania układu
równań
Błąd rozwiązania można sprawdzić obliczając
wektor reszt
:
Zazwyczaj współrzędne wektora r są różne od
zera. Oznacza to, że nie uzyskaliśmy dokładnego
rozwiązania, ale przybliżone. Rozwiązanie to
chcemy poprawić:
x
n
=
y
n
u
n
gdzie:
x jest poprawką, którą można łatwo
wyznaczyć rozwiązując układ:
Należy jednak pamiętać, że wyznaczona poprawka
do rozwiązania również jest przybliżeniem. Kolejne
poprawione rozwiązanie
, które uzyskamy będzie
miało postać:
Jeżeli wektor reszt r=b-Ax jest obliczony dokładnie,
poprawka
x została wyznaczona metodą Gaussa-
Crouta oraz zachodzi warunek:
wówczas norma wektora reszt obliczona w kolejnych
iteracjach maleje
A±x = r
r = b
¡ A~x
~
x = x
¡ ±x
¹
x = ~
x + ±x + ±(±x)
jjb ¡ A¹xjj
1
·
1
2
jjb ¡ Axjj
1
y
1
= b
1
y
i
= b
i
¡ l
i
y
i
¡1
x
i
=
y
i
¡ c
i
x
i+1
u
i
;
i = n
¡ 1; n ¡ 2; : : : ; 1
1
2
jjrjj
1
¸ "jjAjj
1
W
3
(n)
jj±xjj
1
+
jjAxjj
1
"
W
3
(n) =
9
2
n
3
+
61
2
n
2
¡ 18n ¡ 16

23
Algorytm iteracyjnego poprawiania rozwiązania:
1. Rozwiązujemy układ Ax
(1)
=b metodą Gaussa
2. Obliczamy wektor reszt r
(1)
i sprawdzamy
rozwiązanie
3. Sprawdzamy czy poniższy warunek jest prawdziwy
jeśli nie to przerywamy obliczenia. Jeśli jest
spełniony to kontynuujemy.
4. Obliczamy poprawkę i wyznaczamy
5. Wyznaczamy wektor reszt r
(2)
i sprawdzamy
rozwiązanie. W razie konieczności powtarzamy
kroki 3,4,5 aż do skutku.
jjr
i
jj
1
>
jjAx
(1)
jj
1
"
±x
(1)
x
(2)
= x
(1)
+ ±x
(1)
24
Rozwiązywanie układów liniowych
nadokreślonych
Jak rozwiązać poniższy problem?
dla warunku
Brak dokładnego rozwiązania w większości
przypadków. Można poszukiwać conajwyżej
„najlepszego” przybliżenia rozwiązania w sensie
średniokwadratowym.
Dla
rozwiązaniem średniokwadratowym problemu
nadokreślonego (
least square problem
) jest taki
wektor x, który minimalizuje normę:
2
6
6
6
6
6
6
6
6
4
a
11
: : :
a
1n
a
21
: : :
a
2n
: : :
: : :
: : :
: : :
: : :
: : :
: : :
: : :
: : :
: : :
: : :
: : :
a
m1
: : :
a
mn
3
7
7
7
7
7
7
7
7
5
¢
2
6
6
4
x
1
: : :
: : :
x
n
3
7
7
5 =
2
6
6
6
6
6
6
6
6
4
b
1
b
2
: : :
: : :
: : :
: : :
b
m
3
7
7
7
7
7
7
7
7
5
m > n
r = b
¡ Ax
jjrjj
2
= (r
T
r)
1=2
Jeśli macierz A jest macierzą o rozmiarach mxn i
elementach rzeczywistych, b jest wektorem m-
elementowym, a x wektorem n elementowym
spełniającym równanie
wówczas dla dowolnego n-elementowego wektora y
spełniona jest nierówność
Dla dowolnego wektora otrzymujemy warunek
skąd wynika że wektor r jest ortogonalny do
wszystkich wektorów z przestrzeni R(A) rozpiętej na
wektorach kolumnowych macierzy A.
Ponadto nadokreślony układ równań można
przekształcić do postaci
układu normalnego
Macierz A
T
A jest symetryczna, dlatego układ
normalny można rozwiązać metodą Cholesky'ego.
Jeśli kolumny macierzy A są niezależne liniowo to
macierz jest nieosobliwa.
A
T
(b
¡ Ax) = 0
jjb ¡ Axjj
2
· jjb ¡ Ayjj
2
(Az)
T
(b
¡ Ax) = 0
(A
T
A)x = A
T
b
x
6= 0 ! Ax 6= 0
x
T
(A
T
A)x
=
(Ax)
T
Ax =
jjAxjj
2
2
> 0
! det(A
T
A) > 0
25
Gdy kolumny A są niezależne liniowo, wówczas
rozwiązanie układu jest jednoznaczne
gdzie macierz A
I
:
jest
pseudoodwrotnością
macierzy A.
P
A
jest operatorem rzutu ortogonalnego na
przestrzeń kolumnową macierzy A.
Uwaga: jeśli kolumny A są zależne liniowo
(
bardzo często
) to wówczas istnieje wiele
rozwiązań (średniokwadratowych ) dających ten
sam wektor reszt.
Przykład – wpływ uwarunkowania macierzy na
rozwiązanie układu normalnego
x = A
I
b
A
I
= (A
T
A)
¡1
A
T
r
=
(I
¡ P
A
)b
P
A
=
AA
I
= A(A
T
A)
¡1
A
T
A =
2
6
6
4
1
1
1
"
0
0
0
"
0
0
0
"
3
7
7
5 ; b =
2
6
6
4
1
0
0
0
3
7
7
5 ; j"j ¿ 1
Przekształcamy do układu normalnego
Dla precyzji obliczeń rzędu
i macierz A
T
A staje się osobliwa – układ nie posiada
rozwiązania.
Metody wykorzystujące rozkład QR
Dla macierzy A o rozmiarach mxn, w której kolumny
są niezależne liniowo istnieje jednoznaczny rozkład
w postaci
Q jest macierzą o rozmiarach mxn taką że:
D jest macierzą diagonalną
A
T
A
=
2
4
1 + "
2
1
1
1
1 + "
2
1
1
1
1 + "
2
3
5
A
T
b
=
2
4
1
1
1
3
5
"
2
¼ 0
A = QR
Q
T
Q = D
D = diag(d
1
; d
2
; : : : ; d
n
)
d
k
> 0; k = 1; : : : ; n
26
R jest macierzą trójkątną górną z elementami
Warunek minimalizacji normy wektora reszt w
sensie średniokwadratowym przyjmuje postać
Jak wyznaczyć macierze Q i R?
Zmodyfikowana metoda Grama-Schmidta
Wyznaczamy ciąg macierzy
r
kk
= 1; k = 1; : : : ; n
A = A
(1)
; A
(2)
; : : : ; A
(n+1)
= Q
q
i
=
2
6
6
4
q
1;i
: : :
: : :
q
m;i
3
7
7
5
a
(k)
i
=
2
6
6
6
4
a
(k)
1;i
: : :
: : :
a
(k)
m;i
3
7
7
7
5
A
(k)
=
³
q
1
; : : : ; q
k
¡1
; a
(k)
k
; : : : ; a
(k)
n
´
Założenia
1) k-1 pierwszych kolumn w A
(k)
to także k-1
pierwszych kolumn w Q
2) kolumny
są ortogonalne do kolumn
Proces ortogonalizacji polega na rekurencyjnej
ortogonalizacji kolumn o indeksie od k do n w k-tej
iteracji względem kolumny q
k
w ten sposób wyznaczamy k-tą kolumnę R (elementy
r
kj
) oraz kolumnę k+1 macierzy Q (elementy a
j
(k+1)
).
Klasyczna met. GS:
q
1
; : : : ; q
k
¡1
q
k
= a
(k)
k
;
d
k
= q
T
k
q
k
;
r
kk
= 1
a
(k)
k
; : : : ; a
(k)
n
Ax = b
) A
T
Ax = A
T
b
R
T
Q
T
QRx = R
T
Q
T
b
R
T
DRx = R
T
Q
T
b
DRx = Q
T
b
Rx = D
¡1
Q
T
b = y
a
(k+1)
j
=
a
(k)
j
¡ r
kj
a
(k)
k
r
kj
=
q
T
k
a
(k)
j
d
k
j
=
k + 1; : : : ; n
27
klasyczna met. GS
różni się kolejnością
obliczeń:
Jednocześnie przekształcamy wektor b tj.:
Po n+1 krokach b
(n+1)
jest to część wektora
pierwotnego ortogonalna do R(A) i stanowi wektor
reszt.
Po przeprowadzeniu procesu ortogonalizacji do
końca (kolumny macierzy A są liniowo niezależne)
dostajemy
Wyznaczenie R i y wymaga wykonania mn(n+1)
operacji a rozwiązanie układu n(n+1)/2.
Metoda Grama-Schmidta dla macierzy o
liniowo zależnych kolumnach
S=R
-1
jest macierzą trójkątną górną.
Stąd wynika
Może się okazać że a
1
, a
2
,...,a
k-1
są niezależne
liniowo, ale a
k
jest już ich kombinacją (oraz
wektorów q
1
, q
2
,...). Wtedy
(w macierzy Q)
i powinniśmy przerwać proces ortogonalizacji.
Jeśli jednak
to istnieje wektor
Można więc przestawić kolumny j i k oraz
prowadzić proces ortogonalizacji do momentu
gdy pozostałe wektory a
j
(k)
nie będą liniowo
zależne. Szukamy wektora o największej normie:
a następnie za kolumnę k
podstawiamy kolumnę s.
b = b
(1)
; b
(2)
; : : : ; b
(n+1)
b
(k+1)
= b
(k)
¡ y
k
q
k
;
y
k
=
q
T
k
b
(k)
d
k
Q
=
(q
1
; : : : ; q
n
)
R
=
(r
kj
)
y
=
(y
1
; y
2
; : : : ; y
n
)
T
A
=
QR
b
=
Qy + r
Rx
=
y
A = QR
! AR
¡1
= Q
! Q = AS
q
k
= s
1k
a
1
+ s
2k
a
2
+ : : : + s
kk
a
k
rank(A) > k
a
(k)
j
6= 0;
k
· j · n
jja
k
s
jj
2
= max
k
·j·n
jja
(k)
j
jj
2
q
k
= a
k
¡
k
¡1
X
i=1
r
ik
q
i
r
ik
=
q
T
i
a
k
d
i
; i = 1; 2; : : : ; k
¡ 1
a
(k)
k
= 0
28
Dla rank(A)=r
A
<n rozkład QR ma postać
gdzie: R
rxr
-macierz trójkątna górna (r
kk
=1)
S- macierz o rozmiarach r
A
x
(n-r
A
)
Rozwiązania szukamy rozwiązując układ
gdzie: x
1
- ma r składowych, x
2
– jest dowolnym
wektorem o n-r składowych (np. x
2
=0).
(R; S)x = y
x = (x
1
; x
2
)
T
x
1
= R
¡1
y
¡ R
¡1
Sx
2
Przykład
zakładamy
Q =
2
6
6
4
1
0
0
"
¡" ¡"=2
0
"
¡"=2
0
0
¡"=2
3
7
7
5 ;
r =
¡
1
3
"
2
6
6
4
0
1
1
1
3
7
7
5
R =
2
4
1
1
1
0
1
1=2
0
0
1
3
5 ; y =
2
4
1
1=2
1=3
3
5
x =
2
4
1=3
1=3
1=3
3
5 ; x
dok
=
2
4
1=(3 + "
2
)
1=(3 + "
2
)
1=(3 + "
2
)
3
5
"
¿ 1;
"
2
¼ 0
Q
=
(q
1
; q
2
; : : : ; q
r
A
)
A
=
Q(R; S)
b
=
Qy + r
Wyszukiwarka
Podobne podstrony:
DYNAMIKA UKLADOW LINIOWYCH id 1 Nieznany
Algebra liniowa1 id 57289 Nieznany
Instrukcja obslugi Stojak do be Nieznany
DYSKRETYZACJA CIĄGŁYCH UKŁADÓW LINIOWYCH
Algebra liniowa 1 3 id 57241 Nieznany
w 3 dynamika ukladów liniowych
badop gry liniowe id 78528 Nieznany (2)
04 Własności dynamiczne układów liniowych
IV.13.14.15 Metody numeryczne rozwiązywania układów liniowyc, IV
Scilab rozwiazywanie ukladow liniowych
2 Regresja liniowa dla danych Nieznany (2)
Cw 3 Liniowe i nieliniowe eleme Nieznany
09 Synteza układów liniowych sterowania automatycznego
więcej podobnych podstron