1
Ruch bryły sztywnej,
dynamika ruchu obrotowego
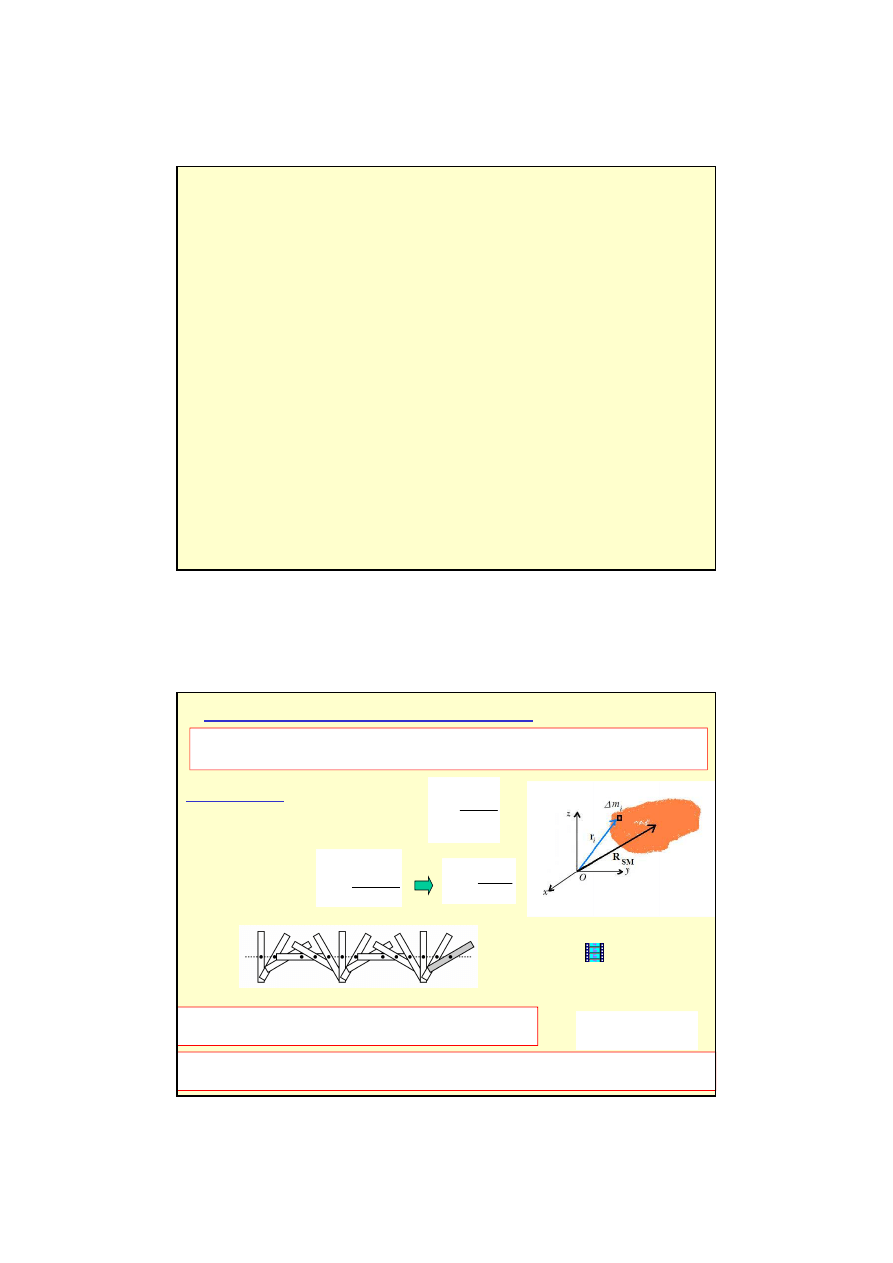
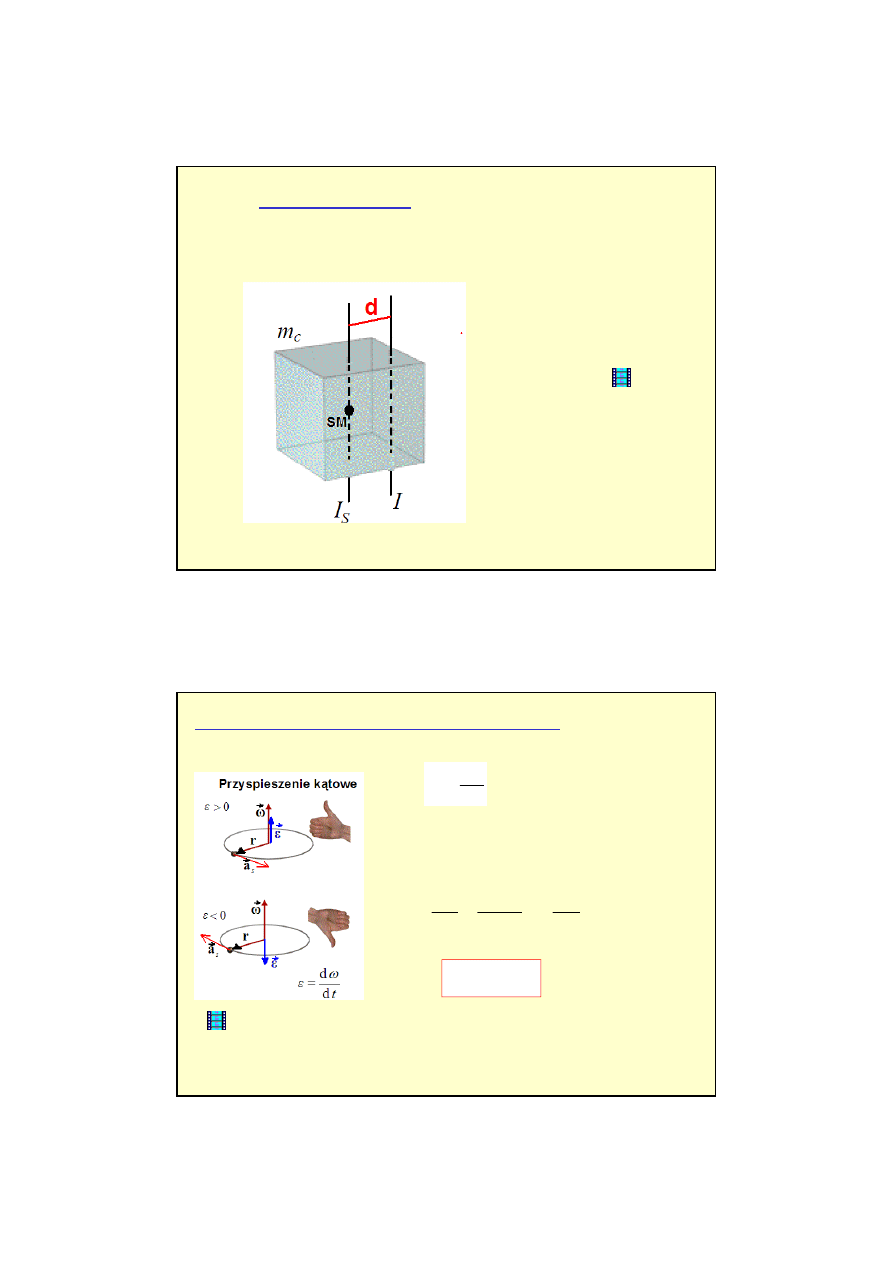
OPIS RUCHU BRYŁY SZTYWNEJ
Brył
ą
sztywna nazywamy zbiór punktów materialnych (niesko
ń
czenie wielu),
których wzajemne poło
ż
enie nie zmienia si
ę
pod wpływem działaj
ą
cych sił.
c
n
i
i
m
m
∑
=
∆
=
1
i
sm
r
R
c
m
dm
∫
=
r
R
sm
-dla układu punktów materialnych
-dla bryły sztywnej
m
m
=
i
N
=1
i
i
N
=1
i
∑
∑
r
R
i
sm
.
1
zewn
n
i
i
sm
M
F
F
a
=
=
∑
=
Ruch bryły sztywnej mo
ż
na rozło
ż
y
ć
na:
ruch post
ę
powy
ś
rodka masy i ruch obrotowy
Ś
rodek masy układu punktów materialnych porusza si
ę
w taki sposób, jakby cała masa
układu była skupiona w
ś
rodku masy i jakby wszystkie siły zewn
ę
trzne na
ń
działały.
Ruch post
ę
powy:
Ś
rodek masy:
2
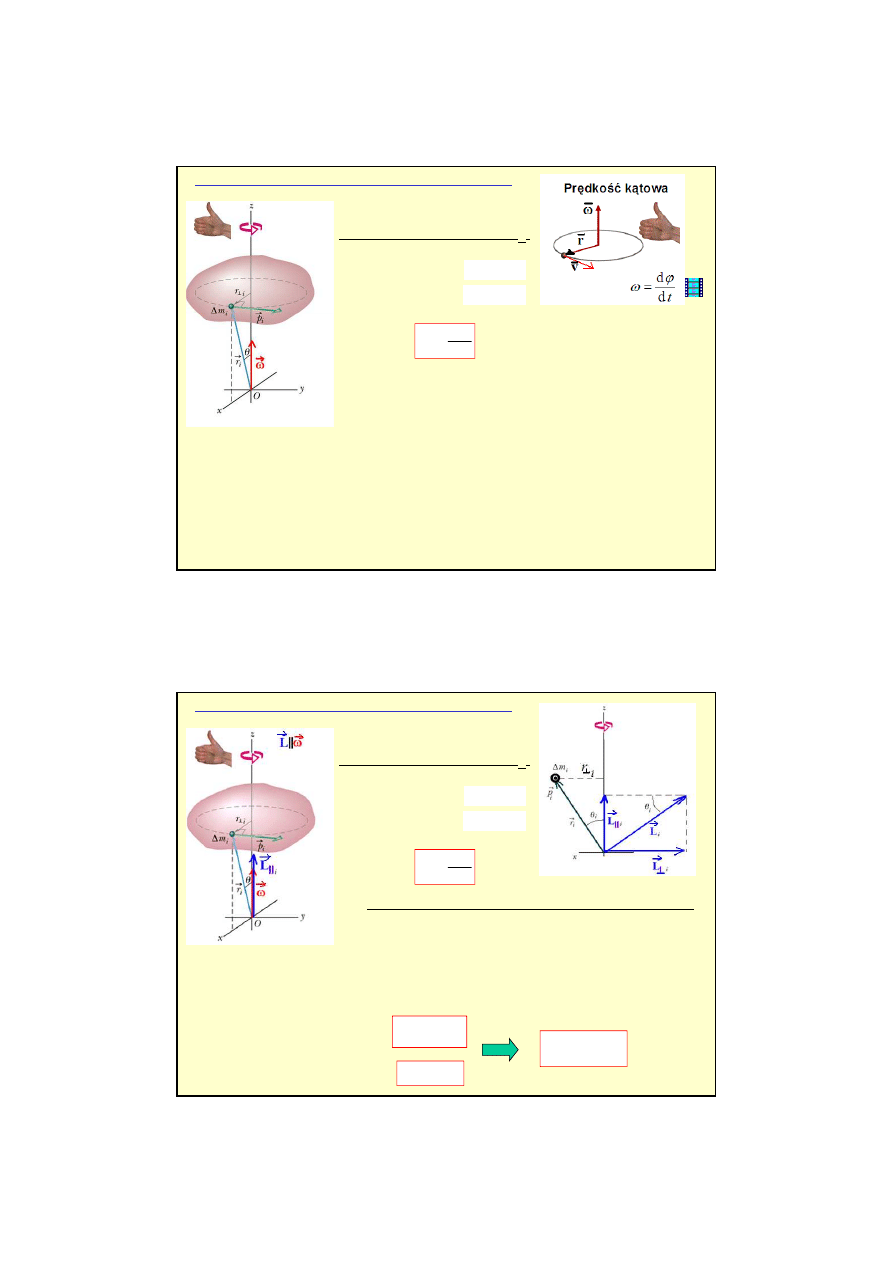
Ruch obrotowy (przypadek szczególny L||
ω
ω
ω
ω
)
Dla elementarnej masy
∆
m
i
:
i
i
i
F
r
M
×
=
i
i
i
p
r
L
×
=
- moment p
ę
du:
- moment siły:
t
i
i
d
d L
M
=
i
i
i
i
ω
r
ω
r
⊥
=
=
θ
sin
v
Ruch obrotowy (przypadek szczególny L||
ω
ω
ω
ω
)
Dla elementarnej masy
∆
m
i
:
i
i
i
F
r
M
×
=
i
i
i
p
r
L
×
=
- moment p
ę
du:
- moment siły:
t
i
i
d
d L
M
=
moment
bezwładno
ś
ci:
∑
∆
=
⊥
i
m
r
I
i
i
2
∫
=
m
r
I
d
2
ω
L
Ι
=
ω
ω
θ
θ
θ
∆
=
∆
=
∆
=
=
∆
=
=
=
=
∑
∑
∑
∑
∑
∑
⊥
⊥
⊥
⊥
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
i
m
r
r
r
m
r
m
r
m
p
r
L
L
L
2
||
)
(
sin
sin
sin
v
v
Dla całej bryły - obrót wokół osi (zakładaj
ą
c L||
ω
ω
ω
ω
):
i
i
i
i
ω
r
ω
r
⊥
=
=
θ
sin
v
3
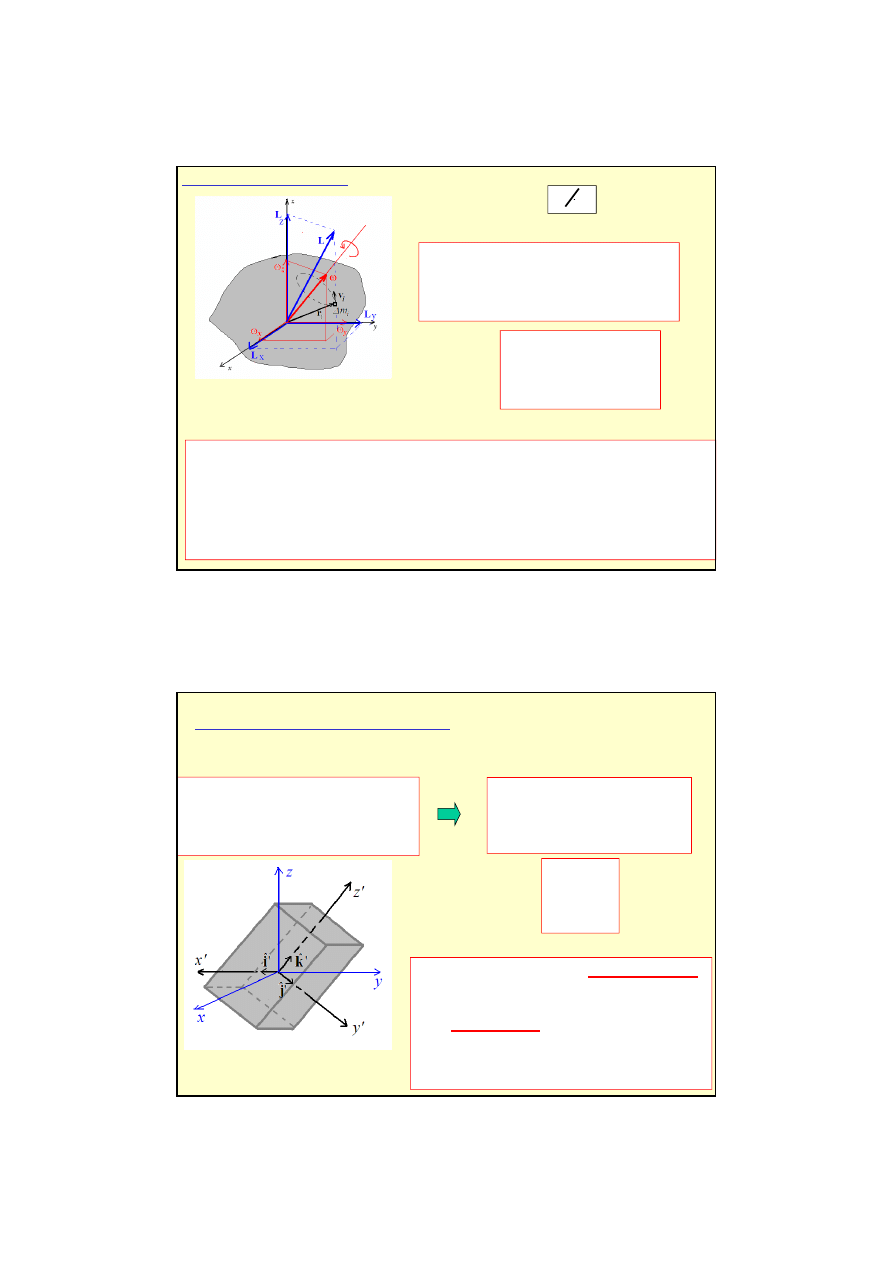
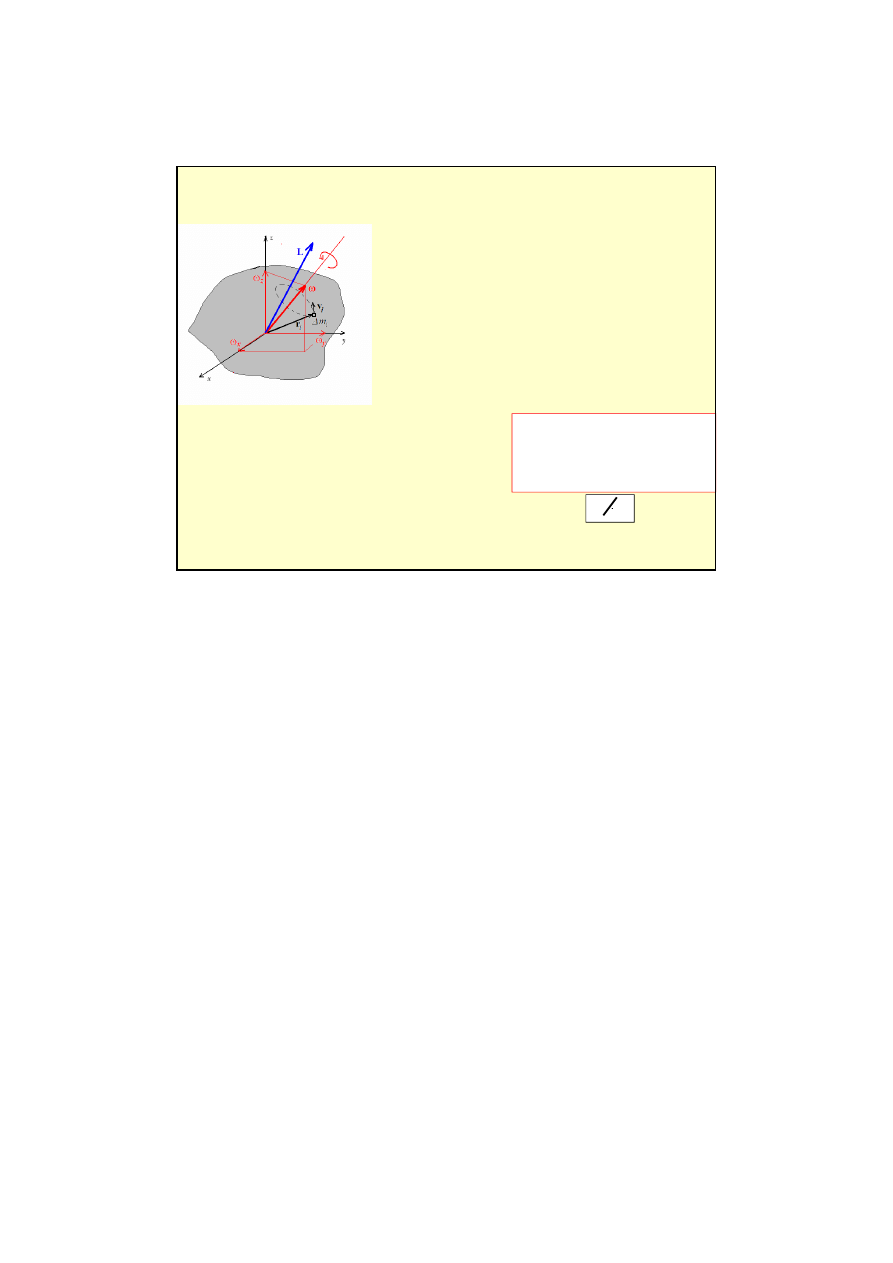
Ruch obrotowy ogólnie
Dla ka
ż
dej bryły sztywnej mo
ż
na zdefiniowa
ć
trzy prostopadłe osie, zwane głównymi
osiami bezwładno
ś
ci.
• Moment bezwładno
ś
ci ciała wzgl
ę
dem jednej z tych osi jest maksymalny, wzgl
ę
dem
drugiej jest minimalny, za
ś
wzgl
ę
dem trzeciej – ma warto
ść
po
ś
redni
ą
: I
I
≥
I
II
≥
I
III
,
• Je
ś
li ciało ma kształt symetryczny główne osie bezwładno
ś
ci s
ą
tak
ż
e osiami symetrii
ciała.
=
⇔
=
z
y
x
zz
zy
zx
yz
yy
yx
xz
xy
xx
z
y
x
I
I
I
I
I
I
I
I
I
L
L
L
ω
ω
ω
ω
I
L
ˆ
ω
L ||
ogólnie gdy:
z
zz
y
zy
x
zx
z
z
yz
y
yy
x
yx
y
z
xz
y
xy
x
xx
x
I
I
I
L
I
I
I
L
I
I
I
L
ω
ω
ω
ω
ω
ω
ω
ω
ω
+
+
=
+
+
=
+
+
=
Ruch obrotowy wokół osi głównych
1)
W ogólnym przypadku L nie jest równoległy
do
ω
ω
ω
ω
.
2) L jest równoległy do
ω
ω
ω
ω
wówczas, gdy osią
obrotu jest jedna z głównych osi
bezwładności (wtedy:
gdzie
I
jest
wartością skalarną).
ω
L
Ι
=
Kiedy L jest równoległy do
ω
ω
ω
ω
?
=
⇔
=
z
y
x
zz
zy
zx
yz
yy
yx
xz
xy
xx
z
y
x
I
I
I
I
I
I
I
I
I
L
L
L
ω
ω
ω
ω
I
L
ˆ
=
'
'
'
'
'
'
'
'
'
'
'
0
0
0
0
0
0
z
y
x
z
z
y
y
x
x
z
y
x
I
I
I
L
L
L
ω
ω
ω
Transformujemy tensor do układu, którego osie współrz
ę
dnych (x’,y’,z’) s
ą
równoległe
do osi głównych bezwładno
ś
ci:
Iˆ
'
'
'
'
'
'
'
'
'
'
'
'
z
z
z
z
y
y
y
y
x
x
x
x
I
L
I
L
I
L
ω
ω
ω
=
=
=
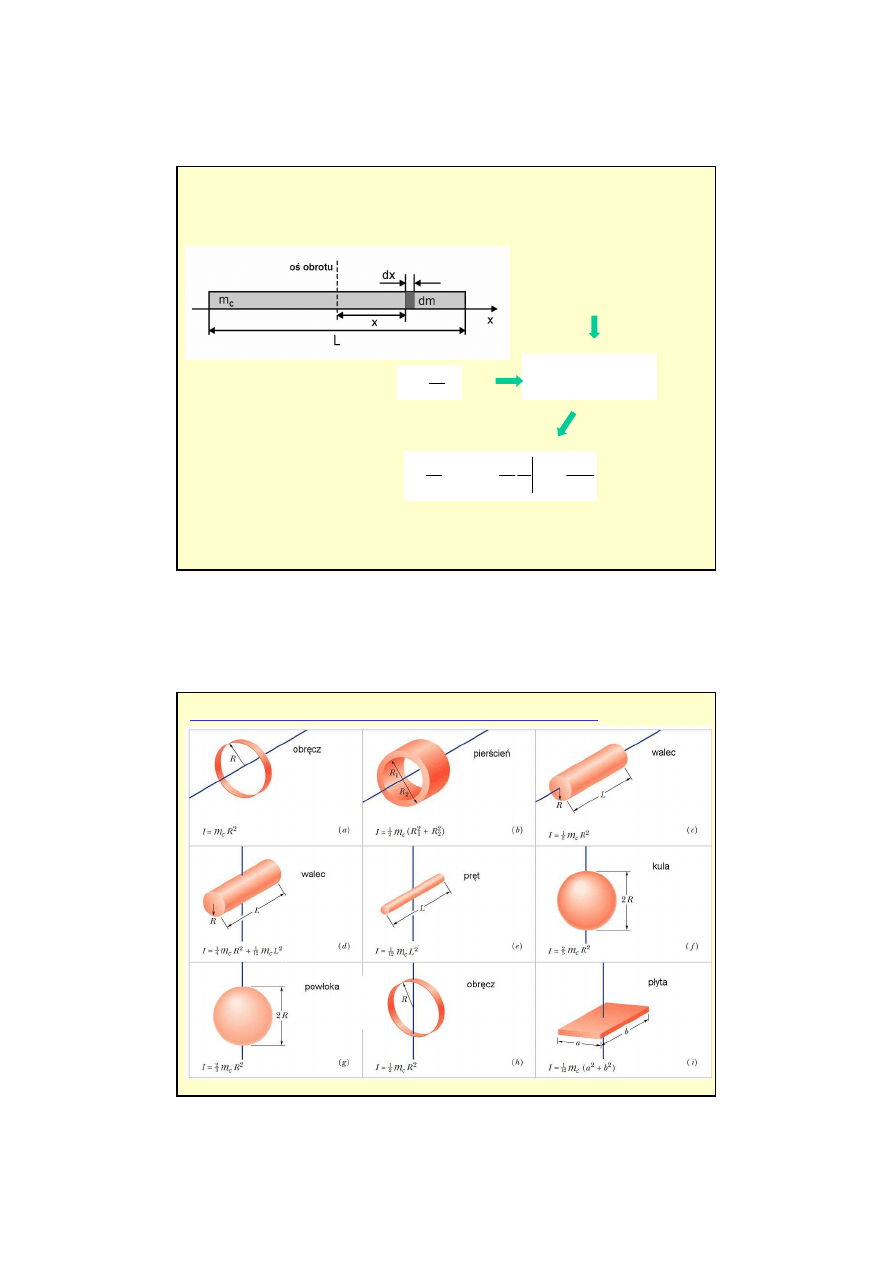
4
Przykład:
liczenie momentu bezwładno
ś
ci pr
ę
ta o masie M i długo
ś
ci L.
Moment bezwładno
ś
ci elementu
o masie dm wynosi x
2
dm
∫
∑
−
=
=
2
/
2
/
2
2
d
d
L
L
i
i
i
m
x
m
x
I
x
L
m
m
c
d
d
=
je
ż
eli pr
ę
t ma stał
ą
g
ę
sto
ść
:
12
3
d
2
2
/
2
/
3
2
/
2
/
2
L
m
x
L
m
x
x
L
m
I
c
L
L
c
L
L
c
=
=
=
−
−
∫
Przykładowe momenty bezwładno
ś
ci wokół osi głównych
5
2
d
m
Ι
Ι
c
S
+
=
Twierdzenie Steinera:
Ruch obrotowy (przypadek szczególny L||
ω
ω
ω
ω
i M||
ω
ω
ω
ω
)
t
d
d L
M
=
II zas. dynamiki Newtona dla
ruchu obrotowego ogólnie
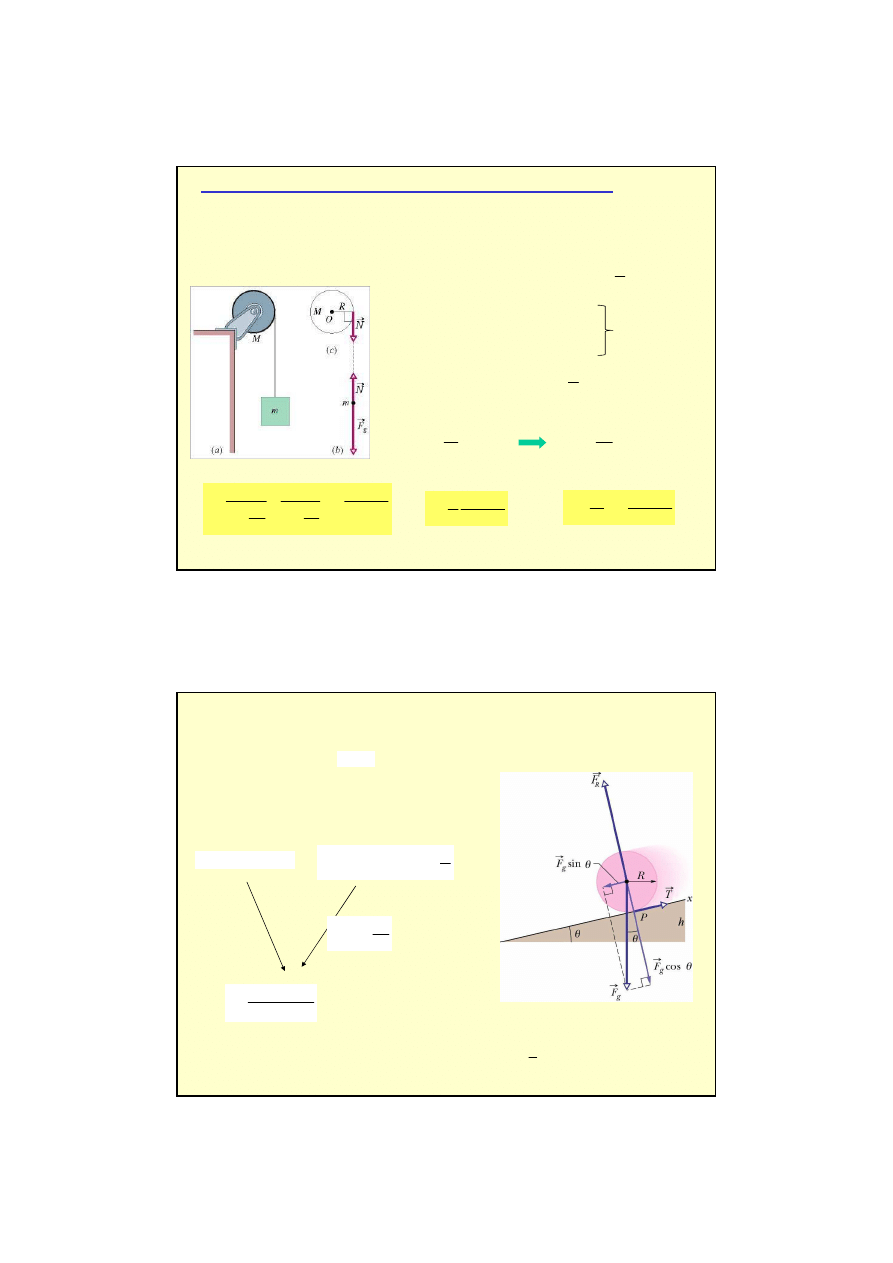
spełniona
ε
ω
ω
L
M
I
t
I
t
I
t
=
=
=
=
d
d
d
)
d(
d
d
ε
M
I
=
Je
ś
li:
to:
ω
M ||
ω
L
Ι
=
oraz
6
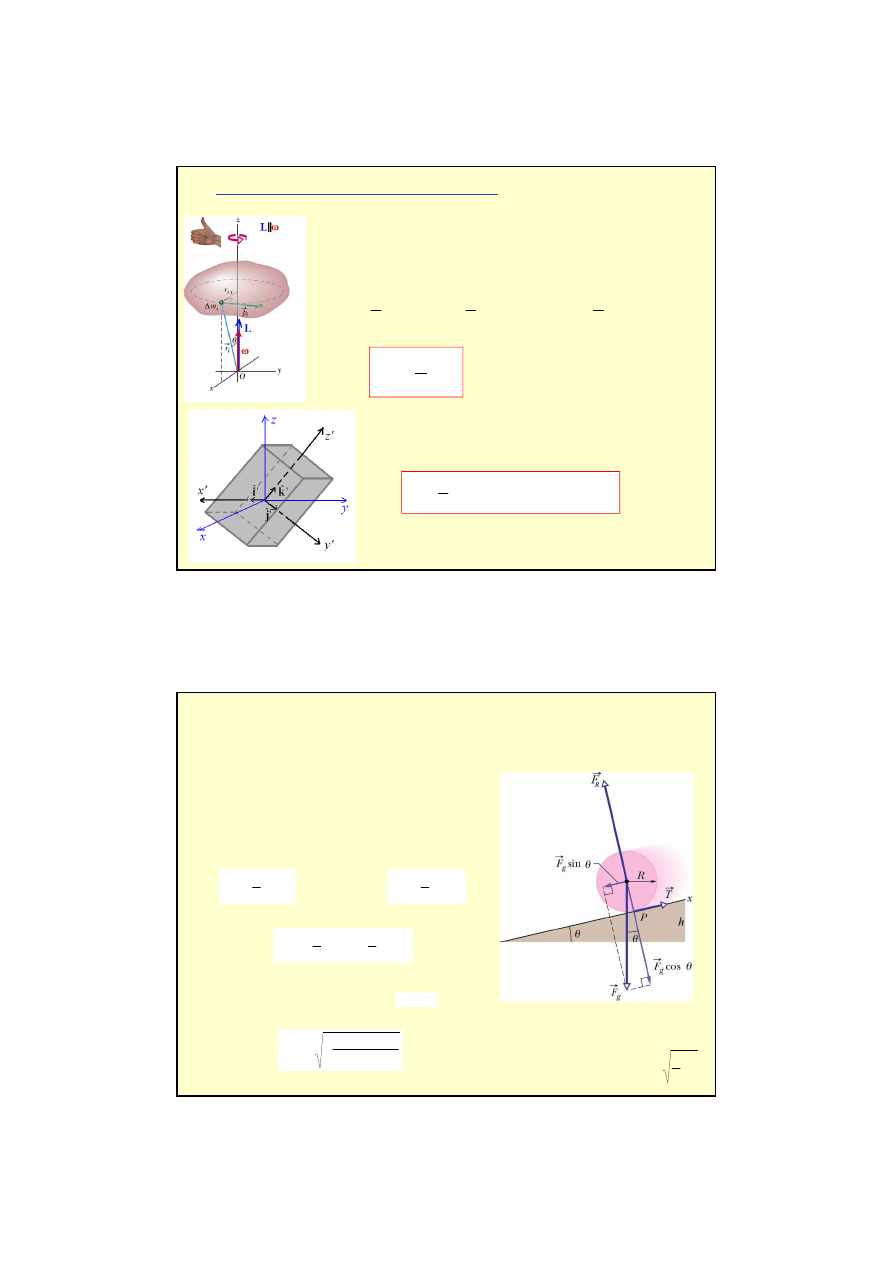
Znajd
ź
przyspieszenie liniowe klocka o masie m, przyspieszenie k
ą
towe
bloczka oraz napr
ęż
enie nici. Dane s
ą
masa bloczka M i jego promie
ń
R. (Wszelkie
opory i tarcie pomijamy).
2
2
1
MR
Moment bezwładno
ś
ci bloczka wynosi
M
m
m
g
M
m
mg
R
I
m
mg
a
+
=
+
=
+
=
2
2
2
2
M
m
mM
g
R
I
N
+
=
=
2
ε
M
m
m
R
g
+
=
2
2
ε
Ruch postępowy
Ruch obrotowy
ε
I
RN
M
wyp
=
=
ma
N
mg
F
wyp
=
−
=
R
a
=
ε
związek miedzy ruchem
postępowym i obrotowym
II zasada
dynamiki
Newtona
Przykład (1):
ma
R
I
mg
=
−
ε
ma
R
Ia
mg
=
−
2
PRZYKŁADY RUCHU BRYŁY SZTYWNEJ
Przykład ruchu (3): Toczenie si
ę
(bez po
ś
lizgu) po równi pochyłej
– równania ruchu
Toczenie bez po
ś
lizgu:
R
a
ε
=
ma
T
mg
=
−
θ
sin
ruch post
ę
powy
ruch obrotowy
R
a
I
I
RT
M
SM
SM
=
=
=
ε
.
θ
sin
3
2
g
a
=
np. dla walca:
2
/
sin
R
I
m
mg
a
SM
+
=
θ
2
R
a
I
T
SM
=
7
Energia kinetyczna w ruchu obrotowym
2
2
2
2
2
1
)
(
2
1
2
1
ω
∆
ω
∆
∆
∑
∑
∑
=
=
=
⊥
⊥
i
i
i
i
i
i
i
i
i
k
r
m
r
m
m
E
v
2
2
1
ω
I
E
k
=
•przypadek szczególny, gdy wektor
ω
ω
ω
ω
jest równoległy do
jednej z osi głównych bezwładno
ś
ci (czyli
L
||
ω
ω
ω
ω
):
)
(
2
1
2
'
'
'
2
'
'
'
2
'
'
'
z
z
z
y
y
y
x
x
x
k
I
I
I
E
ω
ω
ω
+
+
=
•ogólnie, gdy wektor
ω
ω
ω
ω
nie jest równoległy do
ż
adnej z osi
głównej (x’,y’,z’ s
ą
głównymi osiami bezwładno
ś
ci):
Przykład ruchu (4): Toczenie si
ę
(bez po
ś
lizgu) po równi pochyłej
– zasada zachowania energii
ruch post
ę
powy
ruch obrotowy
2
2
1
SM
kp
m
E
v
=
R
ω
=
v
2
2
1
ω
I
E
SM
ko
=
2
2
2
1
2
1
ω
SM
SM
I
m
mgh
+
=
v
Toczenie bez po
ś
lizgu
np. dla walca
Z zasady zachowania energii
gh
SM
3
4
=
v
2
/
2
R
I
m
mgh
SM
SM
+
=
v
8
Ruch post
ę
powy
Ruch obrotowy
2
2
1
d
d
v
m
E
m
t
m
m
k
=
=
=
=
a
F
p
F
F
v
p
a,
v,
r,
2
2
1
d
d
,
Iω
E
I
t
Ι
I
k
=
=
=
×
=
=
×
=
ε
M
L
M
F
r
M
ω
L
p
r
L
ε,
ω,
,
ϕϕϕϕ
przypadek szczególny,
L
||
ω
ω
ω
ω
oraz
M
||
εεεε
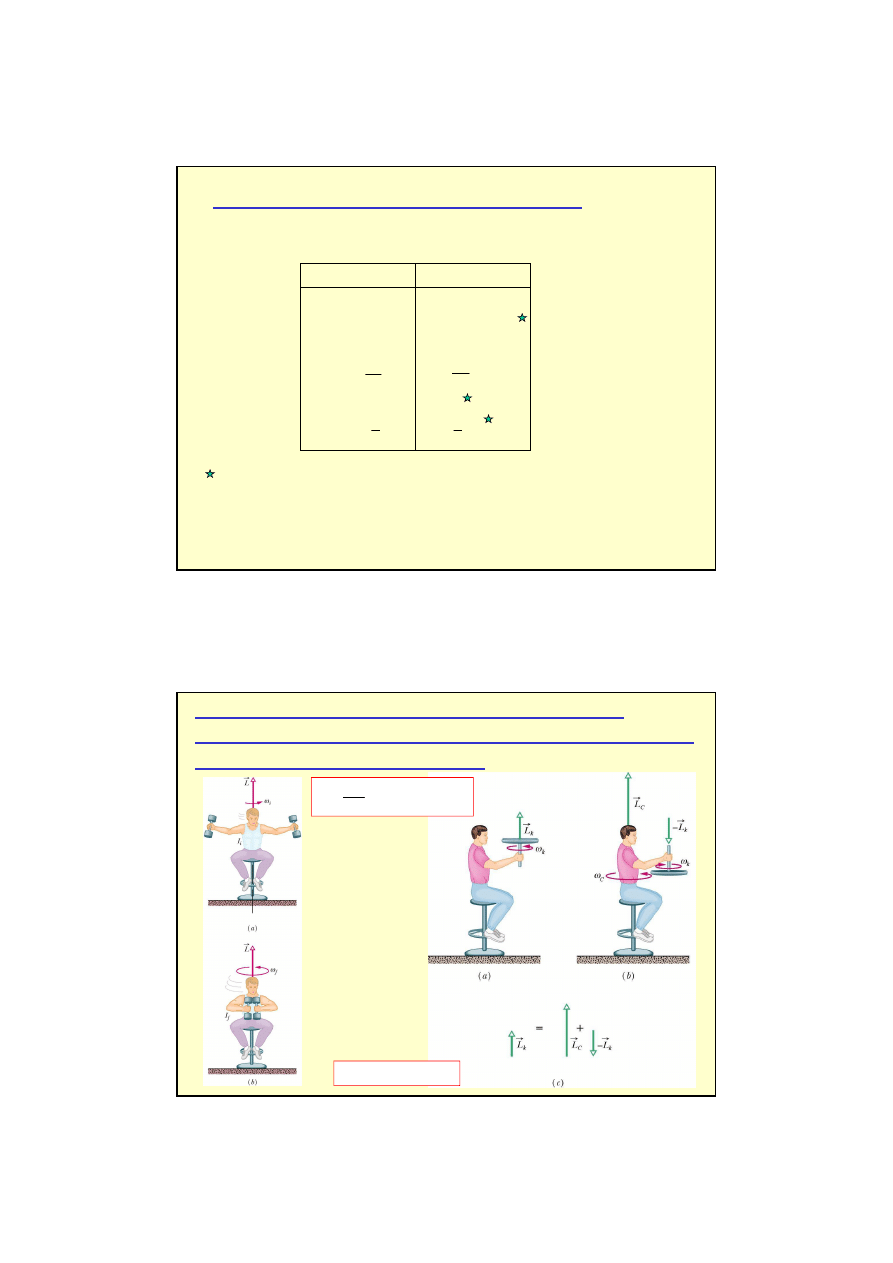
Analogie ruchu obrotowego do ruchu post
ę
powego
const.
0
d
d
=
⇒
=
=
L
L
M
t
const.
=
=
ω
ωω
ω
Ι
L
KONSEKWENCJE ZASADY ZACHOWANIA
MOMENTU PĘDU I DRUGIEJ ZASADY DYNAMIKI
DLA RUCHU OBROTOWEGO
9
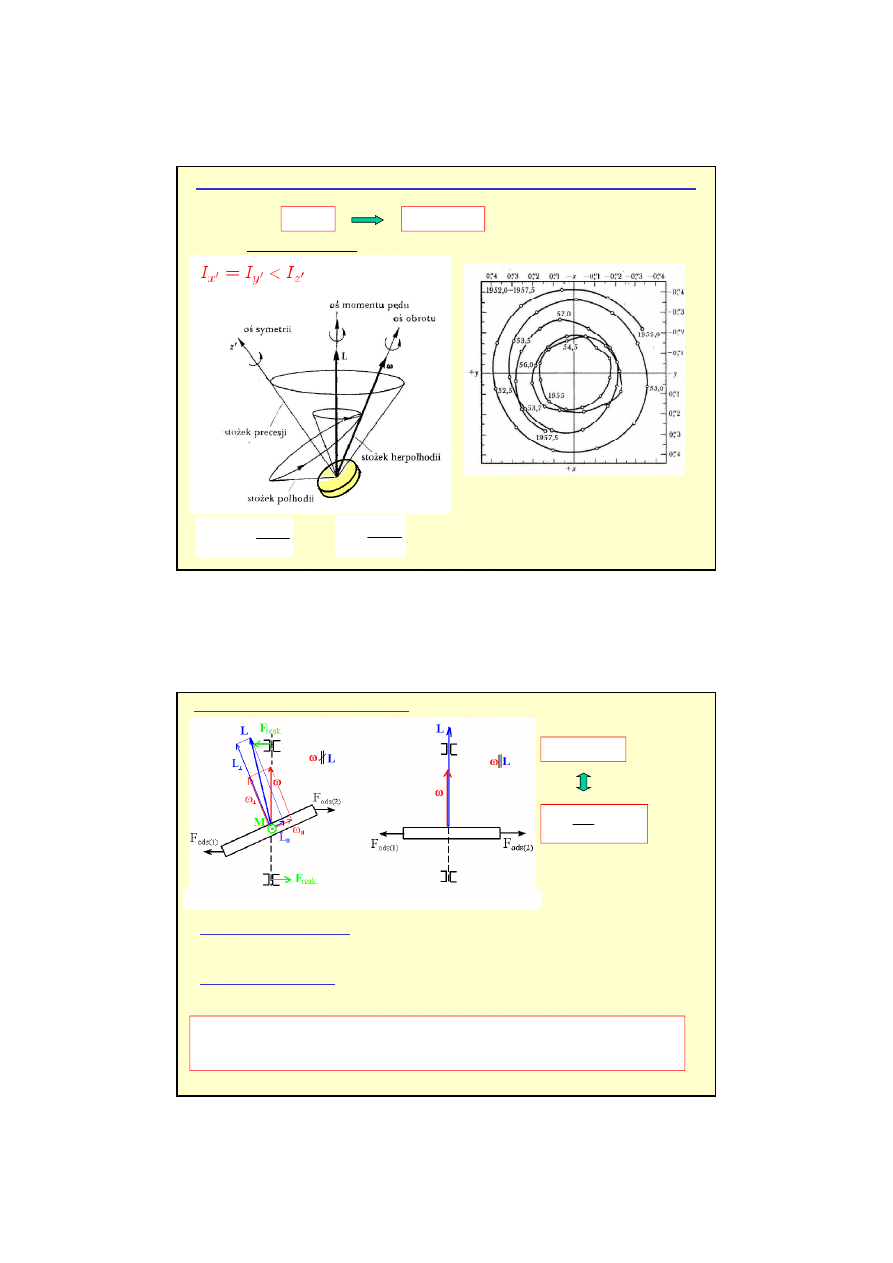
1. Swobodny obrót wokół osi nierównoległej do
ż
adnej z osi głównych
const.
=
L
0
=
M
Precesja „b
ą
ka swobodnego”
•Ziemia nie jest idealna kulą i nie obraca się wokół
osi głównej. Dlatego jej oś obrotu podlega precesji.
•Zmiany położenia osi obrotu,są bardzo niewielkie
(ok. 15 m).
•Okres obiegu wynosi średnio ok. 427 dni.
Precesja osi obrotu Ziemi:
4
2
'
'
R
m
I
I
c
y
x
=
=
2
2
'
R
m
I
c
z
=
2. Stała wymuszona o
ś
obrotu
const.
≠
L
const.
d
d
≠
=
t
L
M
Obrót pręta wokół osi nieswobodnej (po lewej) i swobodnej (po prawej)
Obrót wokół osi nieswobodnej: Gdy za pomocą łożysk ustalimy w przestrzeni oś obrotu (narzucimy
na nią więzy), wektor momentu pędu będzie dążył do zmiany orientacji; spowoduje to powstanie sił
oddziaływania między osią a łożyskami. Momenty sił reakcji łożysk spowodują precesję wektora L.
Obrót wokół osi swobodnej: Nie potrzeba łożysk ponieważ momenty sił są zerowe.
W układzie obracającym się siła odśrodkowa dąży do rozmieszczenia masy jak najdalej od osi
obrotu (maksymalny moment bezwładności). Stabilny jest stan odpowiadający zerowemu
momentowi sił odśrodkowych a tym samym zerowym siłom reakcji łożysk.
10
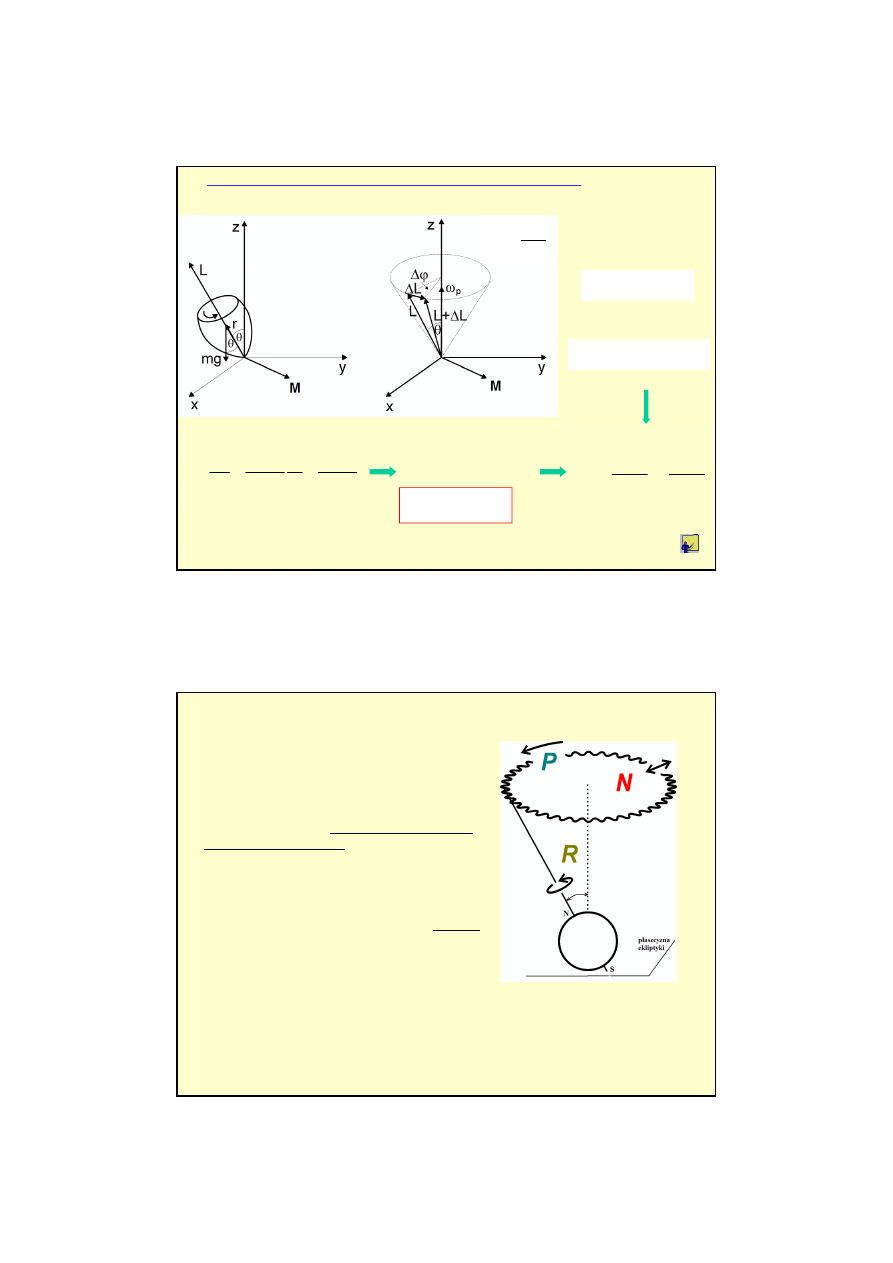
g
r
M
m
×
=
θ
θ
ϕ
ω
sin
1
sin
L
M
t
L
L
t
p
=
∆
∆
≅
∆
∆
=
∆
t
∆
L
M
=
θ
ω
sin
L
M
p
=
L
ω
M
×
=
p
Zjawisko precesji momentu magnetycznego jest podstaw
ą
ró
ż
nych technik
do
ś
wiadczalnych jak np. magnetyczny rezonans j
ą
drowy (NMR)
Precesja b
ą
ka pod wpływem siły ci
ęż
ko
ś
ci
3. Precesja pod wpływem działaj
ą
cego momentu siły
kolejka
ω
ω
I
mgr
L
mgr
p
=
=
θ
sin
mgr
M
=
Precesja osi Ziemi spowodowana momentem siły grawitacyjnej
Ziemia nie jest b
ą
kiem swobodnym.
Niejednorodno
ś
ci pola grawitacyjnego w
którym si
ę
porusza (niezerowy moment sił
grawitacji) powoduj
ą
precesj
ę
astronomiczn
ą
wektora momentu p
ę
du (w przybli
ż
eniu
równoległ
ą
do osi obrotu Ziemi
*
). Okres
precesji wynosi ok. 26 000 lat.
Dodatkowo pole grawitacyjne zmienia si
ę
w
czasie (wpływ Ksi
ęż
yca) co powoduje nutacj
ę
.
*
uwaga w punkcie 1. opisano niewielk
ą
precesj
ę
osi obrotu Ziemi wokół kierunku wektora
momentu p
ę
du (
Ziemia nie jest idealna kulą i nie obraca się wokół osi głównej)
11
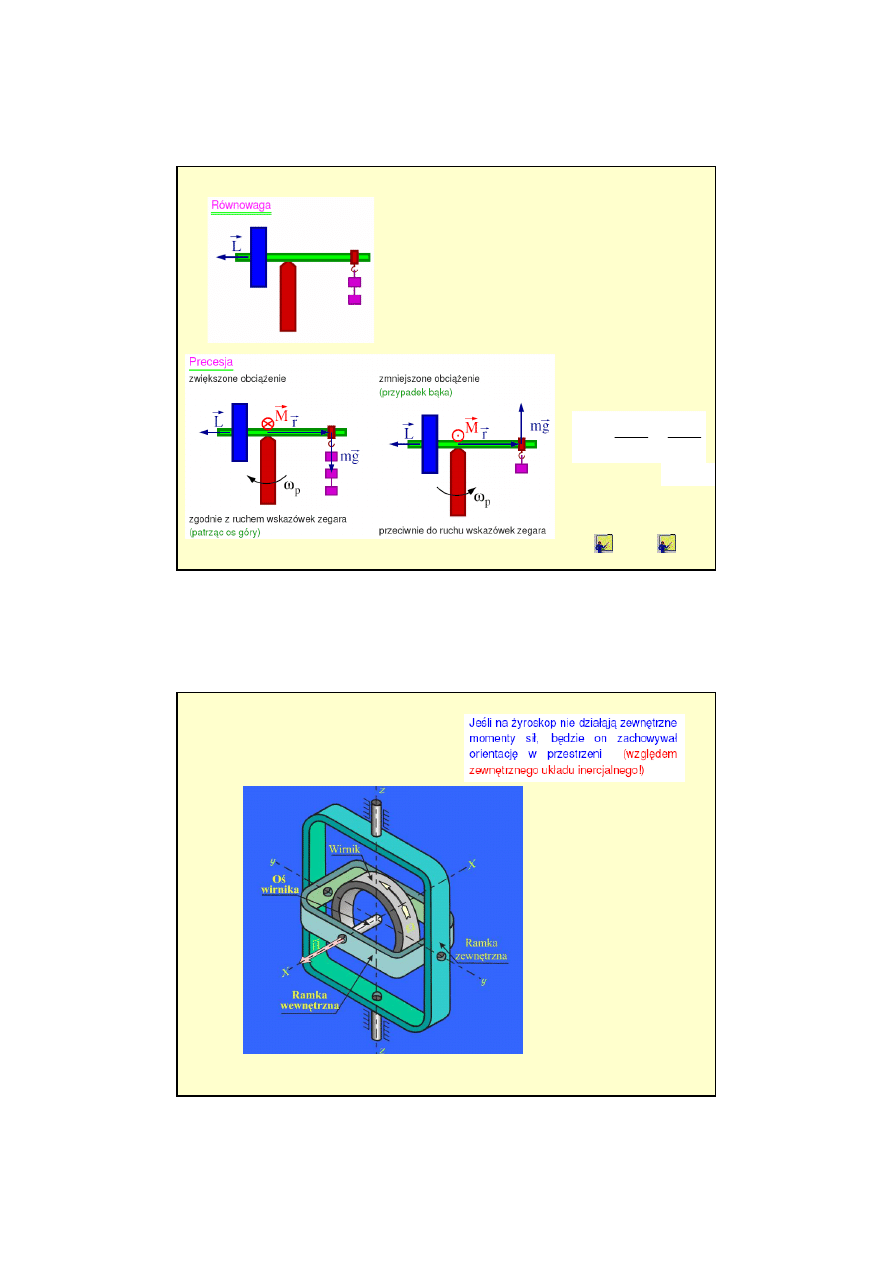
Ż
yroskop
Je
ś
li
ż
yroskop jest w równowadze przy L = 0 to
b
ę
dzie tak
ż
e w równowadze dla L
≠
0.
Jak zachowa si
ę
ż
yroskop gdy zwi
ę
kszymy lub
zmniejszymy przeciwwag
ę
?
kompas
horyzont
Cz
ę
sto
ść
precesji
(podobnie jak dla
b
ą
ka):
o
90
=
θ
jest proporcjonalna do
odj
ę
tej/ dodanej masy m.
ω
ω
I
mgr
L
mgr
p
=
=
Żyroskop - sztuczny horyzont.
12
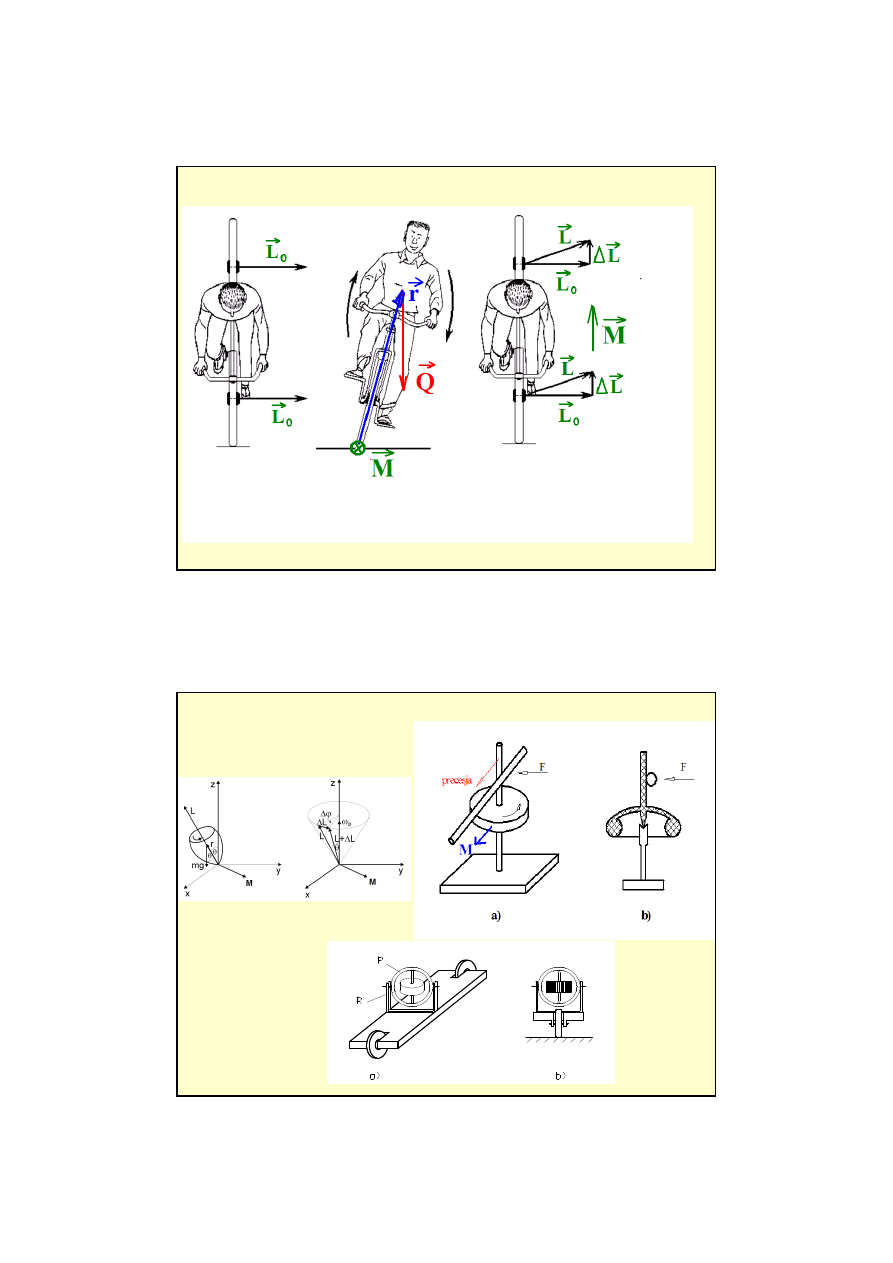
Rower
Kolejka jednoszynowa
13
(
)
(
)
[
]
∑
∑
∑
∑
×
×
∆
=
∆
×
=
×
=
=
i
i
i
i
i
i
i
i
i
i
i
i
i
m
m
r
ω
r
v
r
p
r
L
L
i
i
r
ω
v
×
=
(
) (
) (
)
B
A
C
C
A
B
C
B
A
•
−
•
=
×
×
(
)
(
)
[
]
∑
•
−
⋅
∆
=
i
i
i
i
i
r
m
ω
r
r
ω
L
2
(
)
(
)
[
]
∑
+
+
−
∆
=
i
z
i
y
i
x
i
i
i
i
z
y
x
r
m
ω
ω
ω
r
ω
L
2
∆
−
∆
−
∆
−
∆
=
∆
−
∆
−
∆
−
∆
=
∆
−
∆
−
∆
−
∆
=
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
i
i
i
i
i
i
z
i
i
i
y
i
i
i
x
i
i
z
z
i
i
i
i
i
i
i
z
i
i
y
i
i
i
x
i
i
y
y
i
i
i
i
i
i
i
z
i
i
i
y
i
i
x
i
i
x
x
z
m
y
z
m
x
z
m
r
m
L
z
y
m
y
m
x
y
m
r
m
L
z
x
m
y
x
m
x
m
r
m
L
2
2
2
2
2
2
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
(
)
xz
xy
xx
I
i
i
i
i
z
I
i
i
i
i
y
I
i
i
i
i
x
x
z
x
m
y
x
m
x
r
m
L
∑
∑
∑
∆
−
∆
−
−
∆
=
ω
ω
ω
2
2
(
)
(
)
∑
∑
+
∆
=
−
∆
=
i
i
i
i
i
i
i
i
xx
z
y
m
x
r
m
I
2
2
2
2
2
2
2
2
i
i
i
i
z
y
x
r
+
+
=
∑
∆
−
=
=
i
i
i
i
yx
xy
y
x
m
I
I
(
)
(
)
∑
∑
+
∆
=
−
∆
=
i
i
i
i
i
i
i
i
yy
z
x
m
y
r
m
I
2
2
2
2
(
)
(
)
∑
∑
+
∆
=
−
∆
=
i
i
i
i
i
i
i
i
zz
y
x
m
z
r
m
I
2
2
2
2
∑
∆
−
=
=
i
i
i
i
yz
zy
y
z
m
I
I
∑
∆
−
=
=
i
i
i
i
zx
xz
z
x
m
I
I
=
=
z
y
x
zz
zy
zx
yz
yy
yx
xz
xy
xx
I
I
I
I
I
I
I
I
I
ω
ω
ω
ω
I
L
ˆ
ω
L ||
ogólnie:
UZUPEŁNIENIE – WYPROWADZENIE ZWI
Ą
ZKU
(NADOBOWI
Ą
ZKOWO !)
ω
I
L
ˆ
=
Wyszukiwarka
Podobne podstrony:
IMIR bryla sztywna wykład
Zadania bryla sztywna, IŚ, Semestr 1, Fizyka, Wykłady
IMIR przyklady bryla sztywna id Nieznany
6 IMIR przyklady bryla sztywna Nieznany (2)
1 Bryła Sztywna Quizid 8461 ppt
lfp1 bryla sztywna
Fizyka Uzupełniająca Bryła sztywna
6 bryla sztywna, AGH, Fizyka
7 bryla sztywna, MiBM, Nauczka, 2 semstr, sesja, Test z fizyki (jacenty86), FIZYKA ZERÓWKA, 7 bry a
bryła sztywna pp
6 bryla sztywna
BRYŁA SZTYWNA
Dynamika bryla sztywna
5 bryla sztywna [tryb zgodnosci Nieznany
BRYŁA SZTYWNA, Politechnika Gdańska, Budownictwo, Semestr I, Fizyka I, Ćwiczenia
więcej podobnych podstron