1
Automatyka i Robotyka
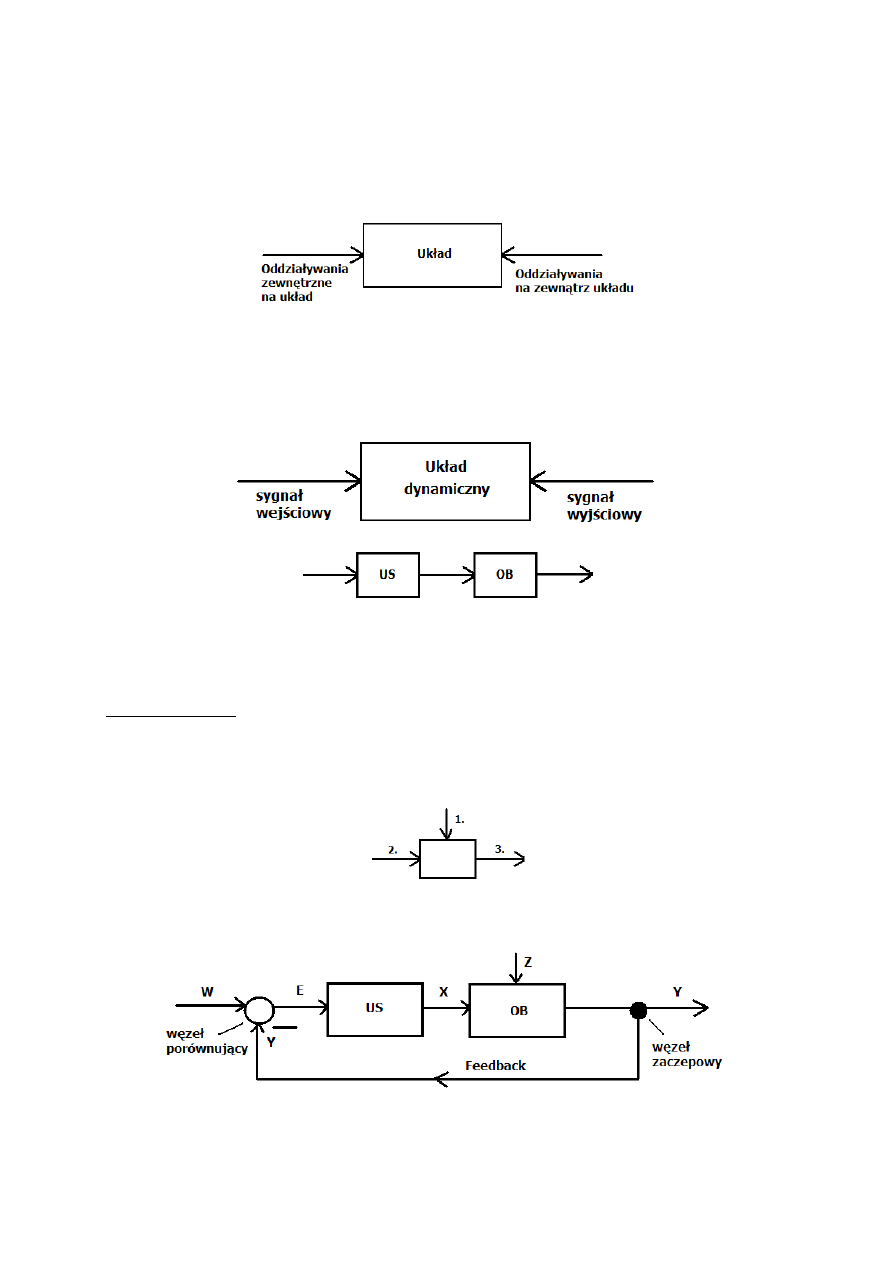
1. Otwarty i zamknięty układ sterowania
Układ – zespół elementów, w których występują oddziaływania wewnętrzne
Sterowanie – oddziaływanie na układ z założonym celem (działanie ukierunkowane na osiągnięcie
danego celu)
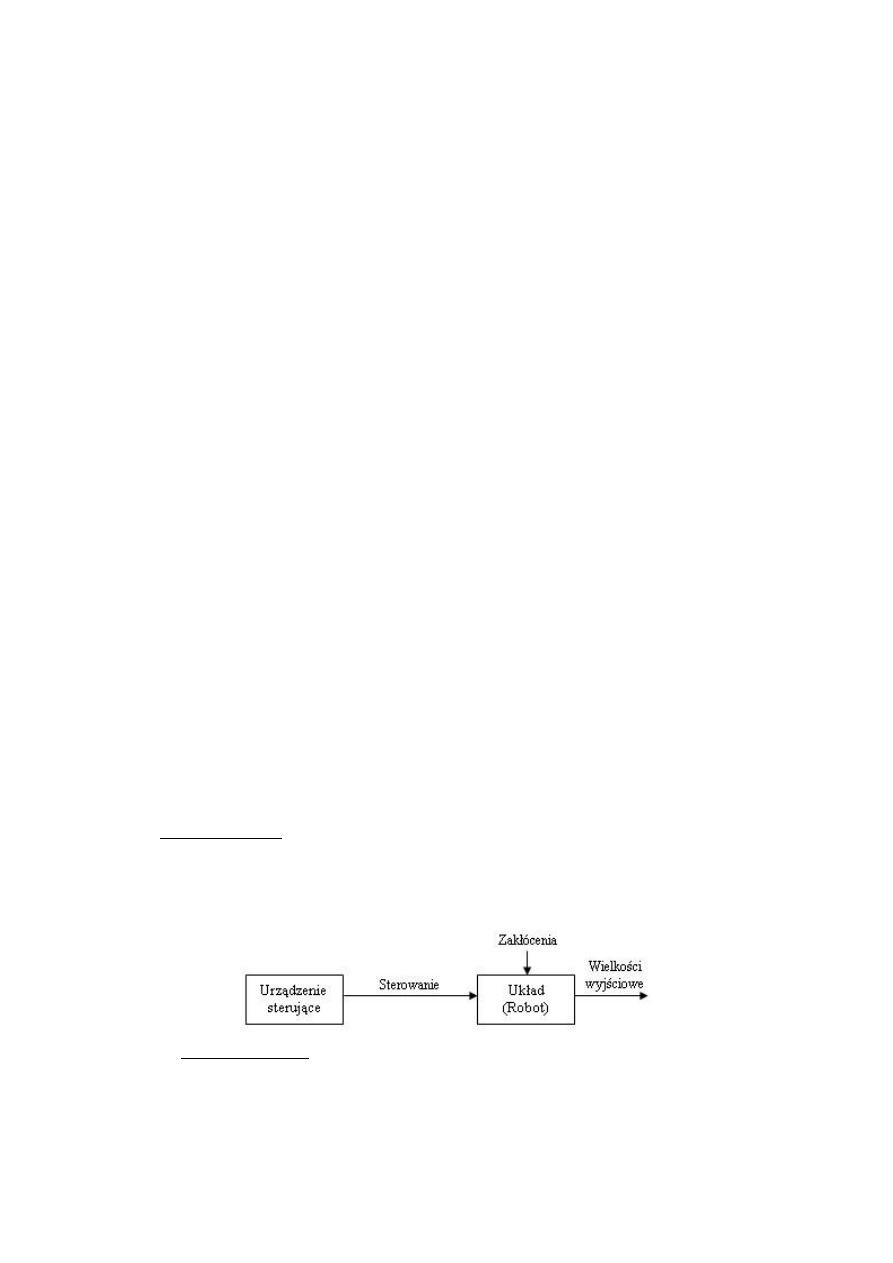
Układ otwarty – urządzenie sterujące wysyłające sygnał wejściowy nie wie nic obiekcie reagującym
sygnałem wyjściowym, brak kontroli reakcji na wyjściu, nie ma sprzężenia zwrotnego.
US – urządzenie sterujące i generujące sterowanie
OB – obiekt sterowania, proces lub urządzenie, w którym odbywa się ten proces lub które podlega
sterowaniu
Sygnały wejściowe:
1.
Zakłócenie – nieprzewidywalne i niekorzystne
2.
Sygnał sterujący – wielkość wymuszająca konkretną reakcję
3.
Sygnał wyjściowy – mówi o reakcji układu na sterowanie i zakłócenie
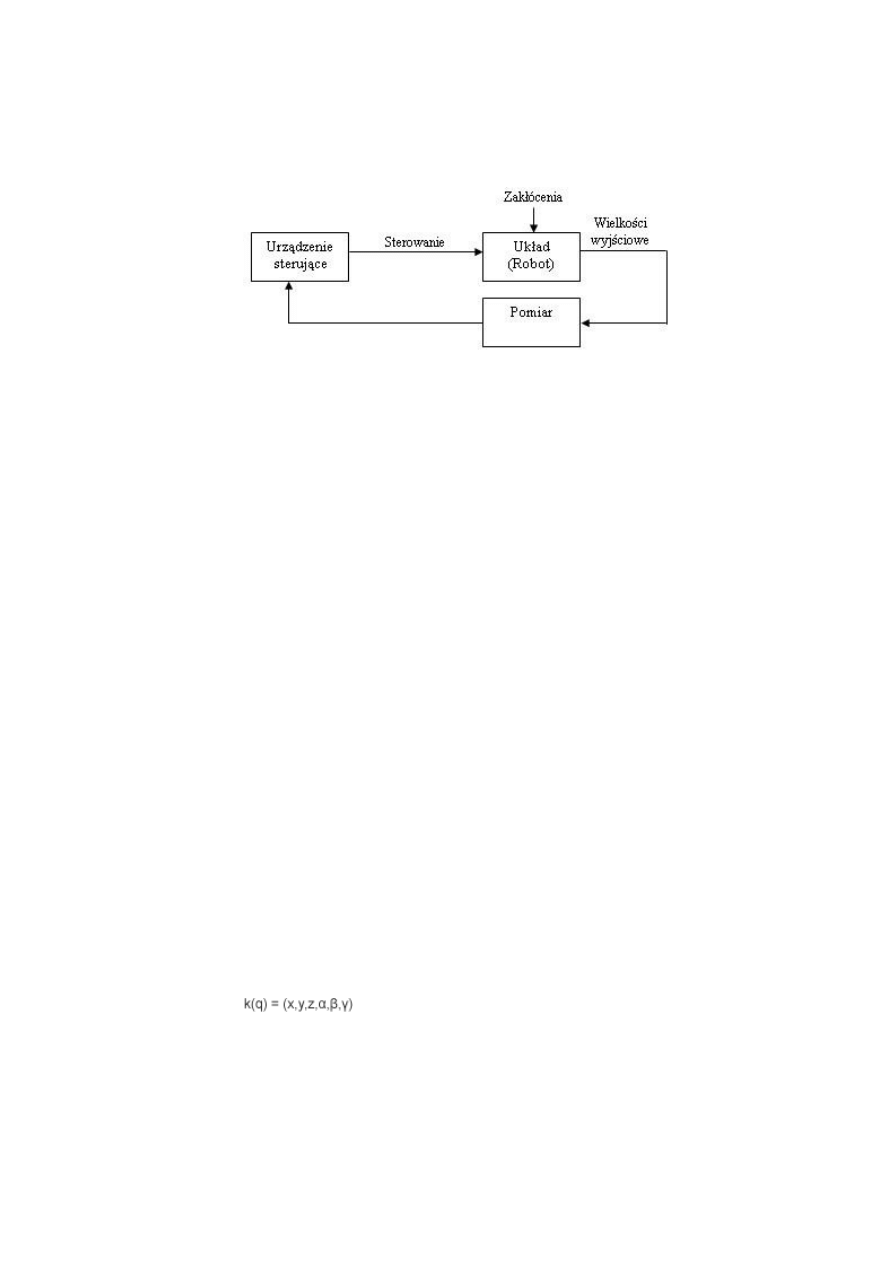
Układ zamknięty – sygnał wyjściowy wychodzący z obiektu wraca do urządzenia sterującego,
kontrola reakcji na wyjściu, czyli pętla sprzężenia zwrotnego.
W – wymuszenie
E – błąd, uchyb regulacji
X – sygnał sterujący
Y – wartość regulowana
Z – zakłócenia

2
Urządzenie sterujące porównuje sygnał zadany (wymuszenie) i wygnał wyjściowy (ich wartości) i
na podstawie różnicy tych wielkości generuje sygnał sterujący obiektem. Celem sterowania w układzie
zamkniętym jest doprowadzenie wielkości wyjściowej do wielkości zadanej.
Układ zamknięty sterowania to układ regulacji automatycznej (regulacja jest z kontrolą).
Sprzężenia zwrotne polega na zawracaniu sygnału wyjściowego na wejście. Sterowanie w układzie
zamkniętym ze sprzężeniem zwrotnym ujemnym nazywamy regulacją.
Sprzężenie zwrotne:
Ujemne
Y
W
E
Stanowi fundamentalny mechanizm samoregulacyjny. Z cybernetycznego punktu widzenia ma ono za
zadanie utrzymanie wartości jakiegoś parametru na zadanym poziomie. Zachodzi ono wtedy, gdy
jakiekolwiek zaburzenia powodujące odchylenie wartości parametru od zadanej wartości w
którąkolwiek stronę indukują działania prowadzące do zmiany wartości parametru w stronę przeciwną
(stąd nazwa "ujemne"), a więc do niwelacji (kompensacji) efektu tego odchylenia. Mówiąc obrazowo:
wartość parametru sprzężonego ujemnie zachowuje się jak niewielka kulka na dnie półkulistego
zagłębienia: każde wytrącenie jej z równowagi powoduje powtórne staczanie się w kierunku
najniższego punktu, pośrodku zagłębienia. W przypadku sprzężenia zwrotnego ujemnego wartość
parametru oscyluje, więc wokół wartości zadanej.
Sprzężenia zwrotne ujemne występują powszechnie w organizmach żywych i urządzeniach
technicznych, jako mechanizmy samoregulacji.
Dodatnie
Y
W
E
Sprzężenie zwrotne dodatnie polega na tym, że w sytuacji zakłócenia jakiegoś parametru w układzie,
układ ten dąży do zmiany wartości parametru w kierunku zgodnym (stąd - "dodatnie") z kierunkiem,
w którym nastąpiło odchylenie od "zadanej" wartości. Sprzężenie zwrotne dodatnie powoduje zatem
narastanie odchylenia. Mówiąc obrazowo: wartość parametru sprzężonego dodatnio zachowuje się jak
niewielka kulka na szczycie półkulistego wzniesienia: każde wytącenie jej z równowagi powoduje coraz
szybsze staczanie się w kierunku, w którym nastąpiło wytrącenie, aż do wypadnięcia kulki poza układ
(o ile nie zadziała odrębny bodziec hamujący). W sprzężeniu zwrotnym dodatnim wartość parametru
odchyla się więc od wartości "zadanej" tym szybciej, im dalej już się od niej znajduje.
Sprzężenie zwrotne dodatnie stosuje się w:
o Generatorze drgań
o Detektorze reakcyjnym
o Detektorze superreakcyjnym
o Mnożniku dobroci
o Przerzutniku
3
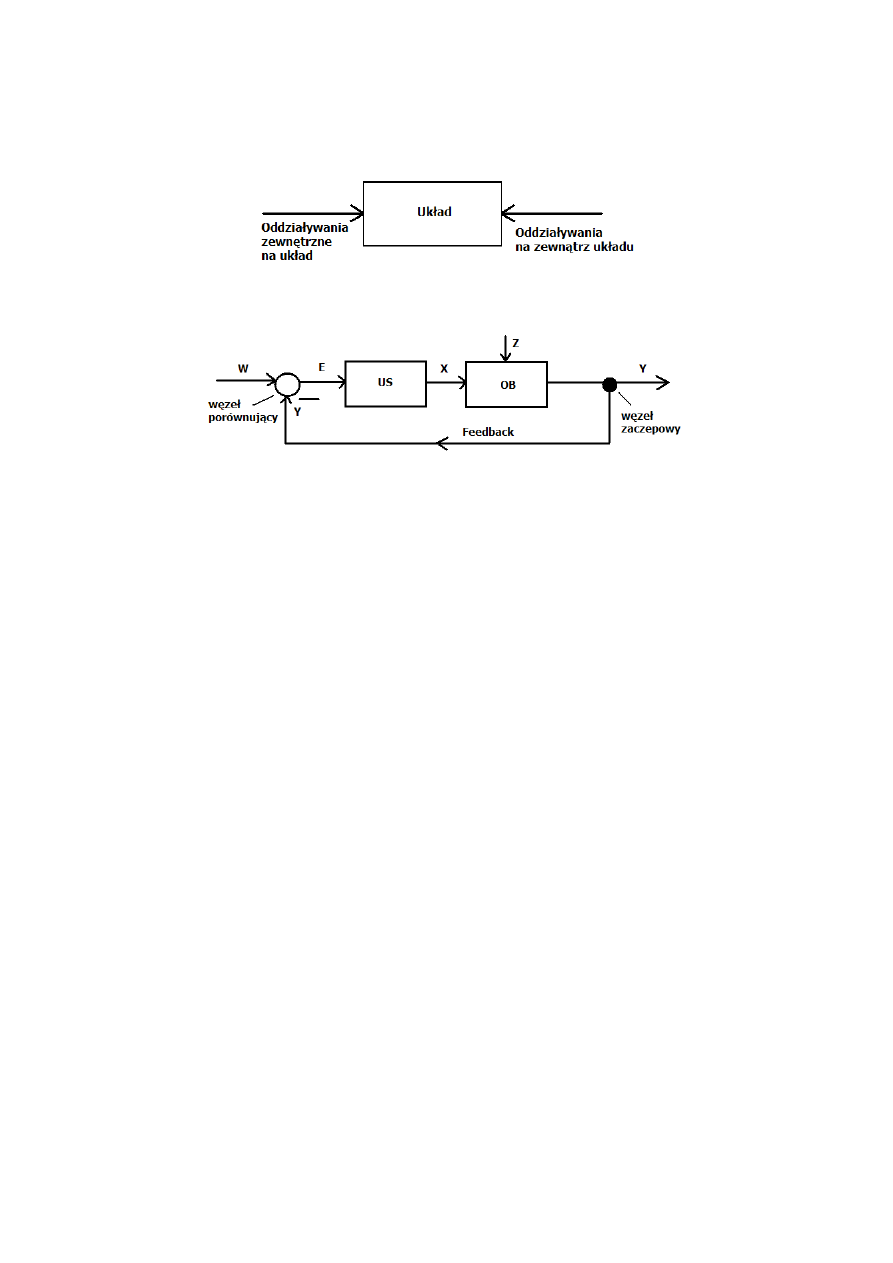
2. Podstawowe elementy układu automatycznego sterowania
Układ – zespół elementów, w których występują oddziaływania wewnętrzne
Sterowanie – oddziaływanie na układ z założonym celem (działanie ukierunkowane na osiągnięcie
danego celu)
US – urządzenie sterujące i generujące sterowanie
OB – obiekt sterowania, proces lub urządzenie, w którym odbywa się ten proces lub które podlega
sterowaniu
W – wymuszenie
E – błąd, uchyb regulacji
X – sygnał sterujący
Y – wartość regulowana
Z – zakłócenia
4
3. Metoda klasyczna i operatorowa opisu dynamiki układu
Układ Dynamiczny: zmienia swój stan.
jw
S
S – operator Laplace’a
Rozwiązanie równania różniczkowego polega na znalezieniu funkcji odpowiadającej danemu
równaniu. Rozwiązaniem równania algebraicznego są konkretne liczby. Rachunek operatorowy opiera
się na tym, że zamiast różniczkowania wprowadzamy mnożenie przez operator „s”, a zamiast
całkowania „1/s”
Metoda operatorowa – można ja stosować tylko do układów liniowych tj. zapisanymi liniowymi
równaniami różniczkowymi. Równanie
t
x
k
t
y
dt
dy
T
jest równaniem nieliniowym, ale
możemy go zlinearyzować. Wówczas otrzymamy rozwiązania przybliżone do tych z metody
operatorowej.
Równanie różniczkujące:
t
x
k
t
y
dt
dy
T
Równanie operatorowe:
s
X
k
s
Y
s
sY
T
Przejście z Y(s) do y(t) za pomocą:
0
dt
e
t
f
s
F
t
s
F(s) jest funkcją Laplace’a a f(t) jest funkcją oryginału.
Transformacja odwrotna:
jw
c
jw
c
st
ds
e
s
F
j
s
F
s
F
2
1
1
- Przekształcenie Laplace’a
1
- Odwrotne przekształcenie Laplace’a
Np.
s
A
s
X
t
A
t
x
1
1
lub
1
1
Ts
s
A
k
s
Y
Ts
s
X
k
s
Y
5
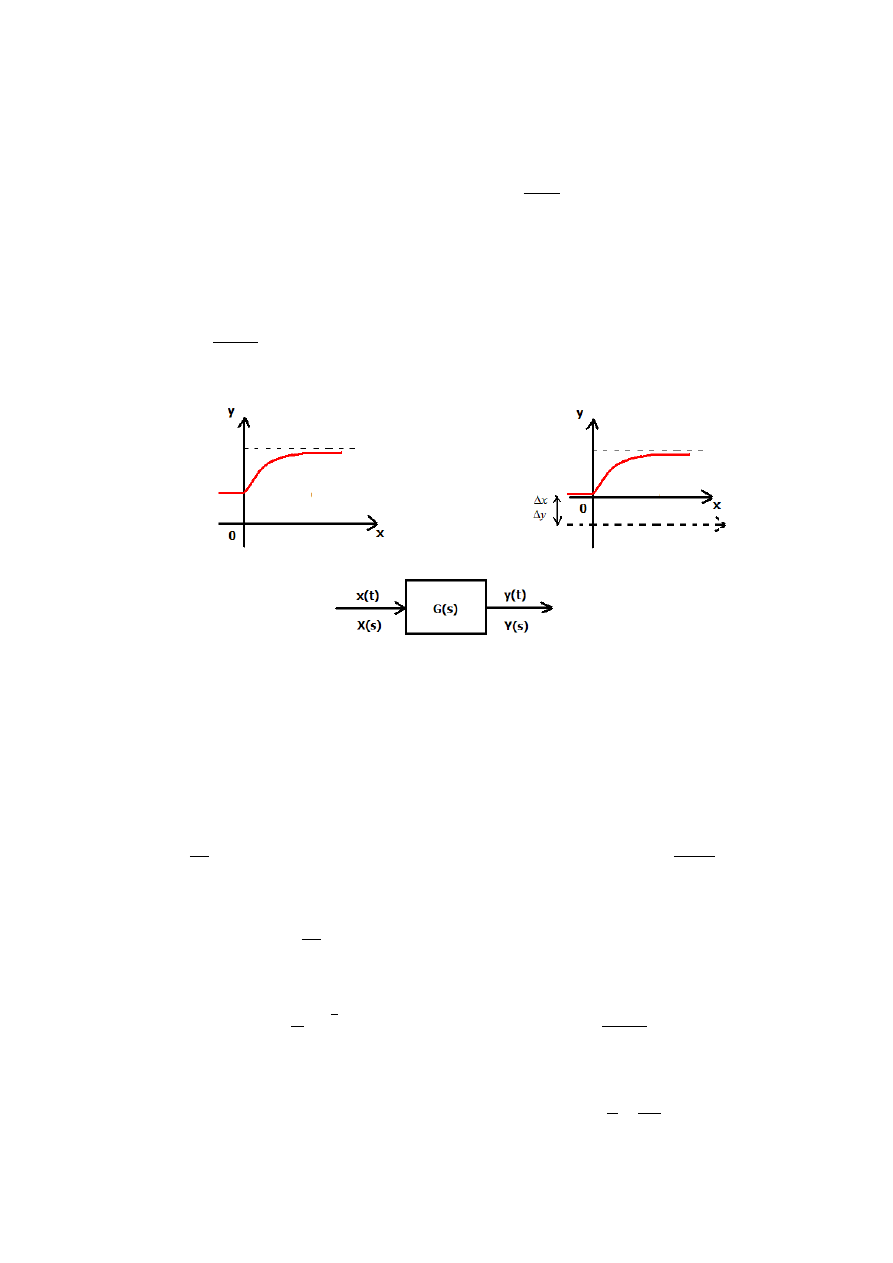
4. Transmitancja operatorowa
– definicja i sposób obliczania
Jest to stosunek sygnału wyjściowego do wejściowego w postaci operatorowej. Pokazuje, w
jaki sposób sygnał wejściowy pokazuje się na wyjściu:
s
X
s
Y
s
G
Definiując transmitancję operatorową zakładamy zerowe warunki początkowe, tzn. dla
ujemnych czasów wszystkie funkcje są równe zero. Jeżeli tak nie jest (rys.1) to przesuwamy osie
x
i
y
tak, aby warunki początkowe były zerowe (rys.2).wtedy transmitancja operatorowa przybiera
postać:
s
X
s
Y
s
G
rys.1
rys.2
s
Y
t
y
s
X
s
G
s
Y
1
Podział transmitancji:
1. Element Proporcjonalny – wyidealizowany
k
s
G
s
X
k
s
Y
t
x
k
t
y
2. Element Inercyjny I rzędu – rzeczywisty
1
Ts
k
s
G
s
X
k
s
Y
s
Y
Ts
t
x
k
t
y
dt
dy
T
3. Element Różniczkujący – wyidealizowany
s
k
s
G
s
X
s
k
s
Y
dt
dx
k
t
y
4. Element Różniczkujący – rzeczywisty
sT
s
k
s
G
s
Y
e
T
k
t
y
T
t
1
5. Element Całkujący – idealny
s
T
s
k
s
G
s
Y
d
x
k
t
y
i
1
0
6
6. Element Całkujący – rzeczywisty
sT
s
k
s
G
s
Y
e
T
k
T
k
t
k
t
y
T
t
1
7. Element Opóźniający
0
0
0
T
s
T
s
e
k
s
G
s
X
e
k
s
Y
T
t
x
k
t
y
8. Element Oscylacyjny
2
0
0
2
2
0
2
0
2
2
1
sin
1
1
0
s
s
k
s
G
t
e
k
t
y
t
k
– współczynnik wzmożenia
i
T
– czas zdwojenia
0
T
– czas opóźnienia
T
- stała czasowa
- względny współczynnik tłumienia (0<
<1)
0
- pulsacja oscylacji własnych
7
5. Charakterystyki czasowe układów dynamicznych
Charakterystyka dynamiczna (czasowa) – funkcja opisująca działanie obiektu w stanie
nieustalonym.
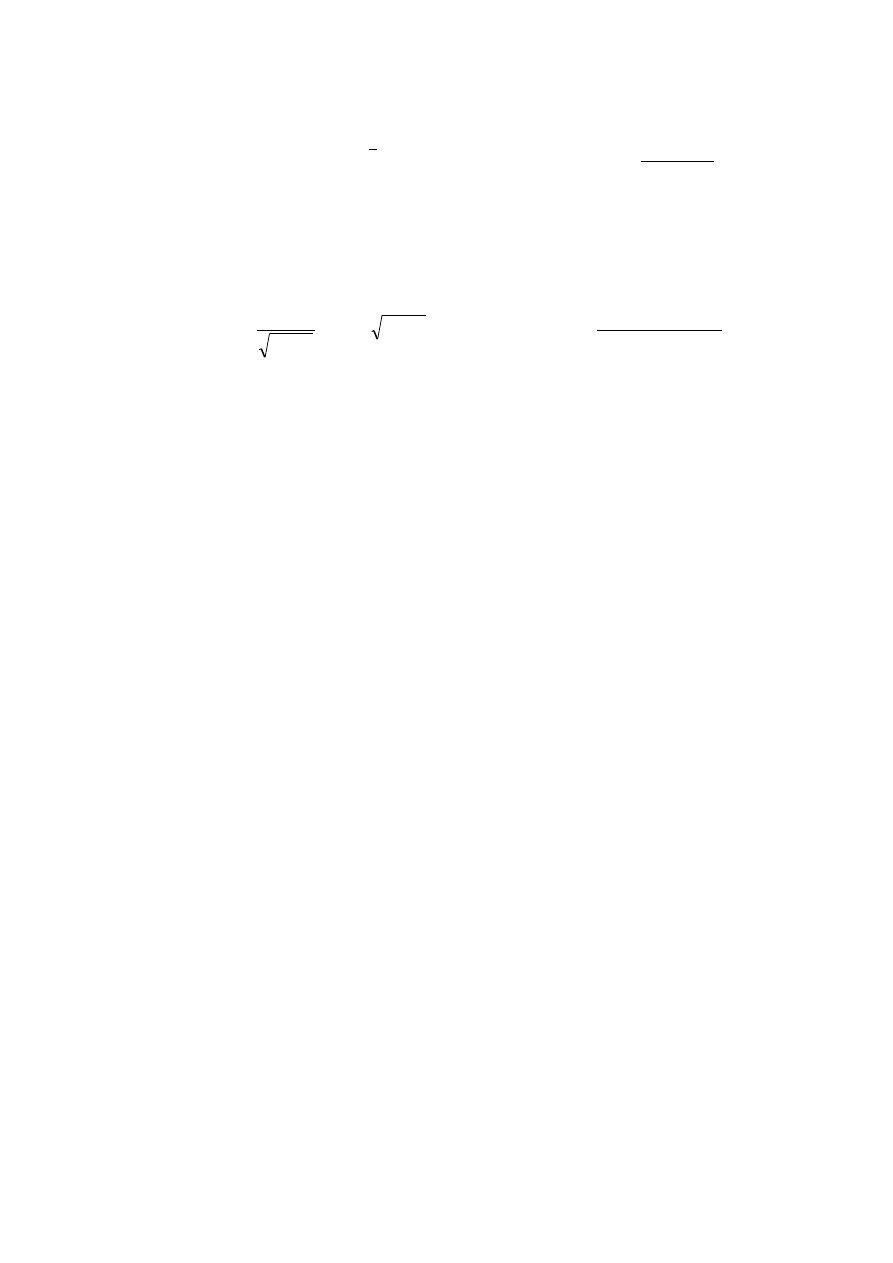
1. Człon proporcjonalny – charakterystyka czasowa skokowa
t
x
k
t
y
P
Q
2. Człony inercyjny I rzędu – charakterystyka czasowa skokowa
t
x
k
t
y
dt
dy
T
3. Człony inercyjne II i wyższych rzędów – charakterystyka czasowa skokowa
II rzędu
III rzędu
IV rzędu
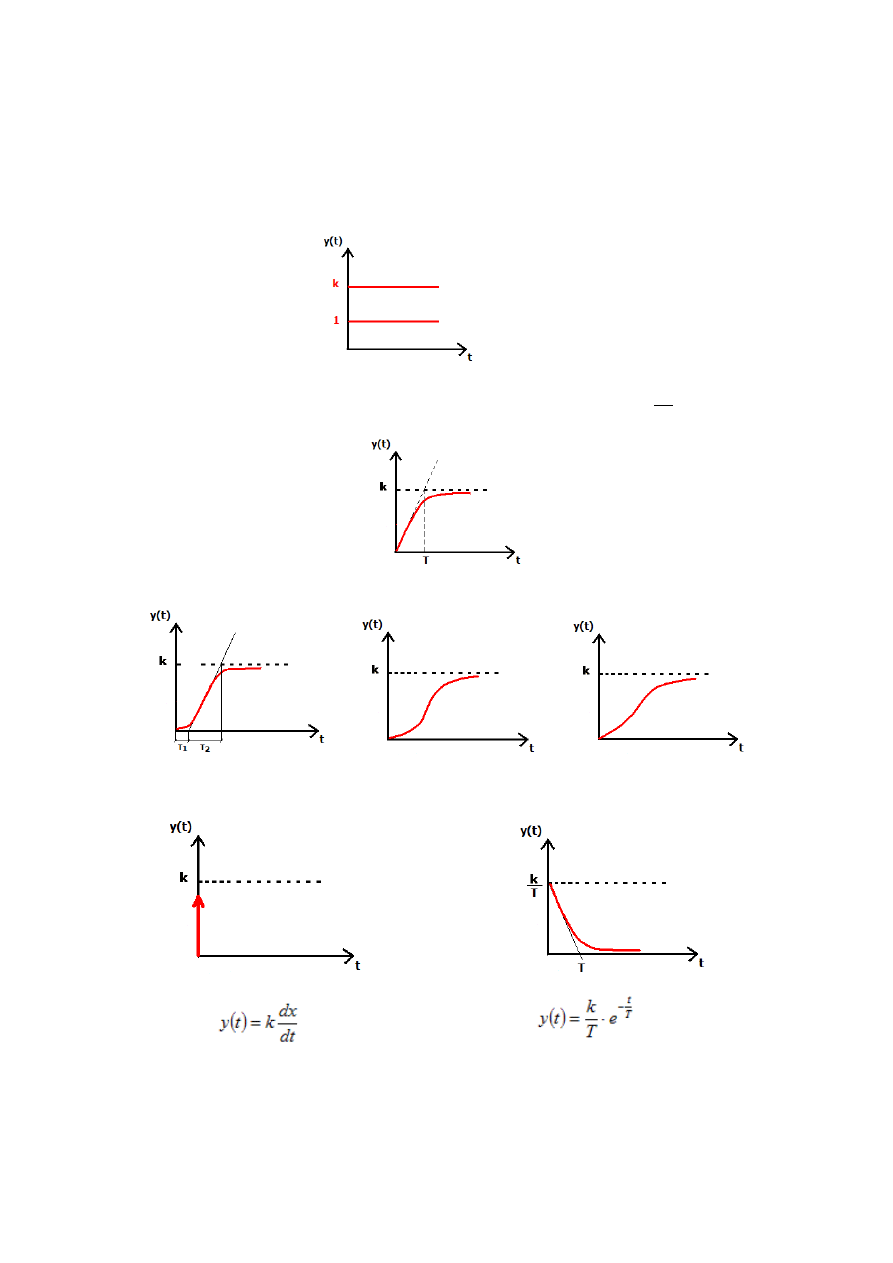
4. Człon różniczkujący – charakterystyka czasowa impulsowa
Idealny:
Rzeczywisty:
8
5. Człon całkujący – charakterystyka czasowa skokowa
tg
k
Idealny:
Rzeczywisty:
6. Człon opóźniający – charakterystyka czasowa skokowa
7. Człon oscylacyjny – charakterystyka czasowa skokowa
Charakterystyki czasowe:
Skokowe:
odpowiedź na sygnał skokowy (jednostkowy)
Impulsowe:
odpowiedź na impuls (delta Diraca)
9
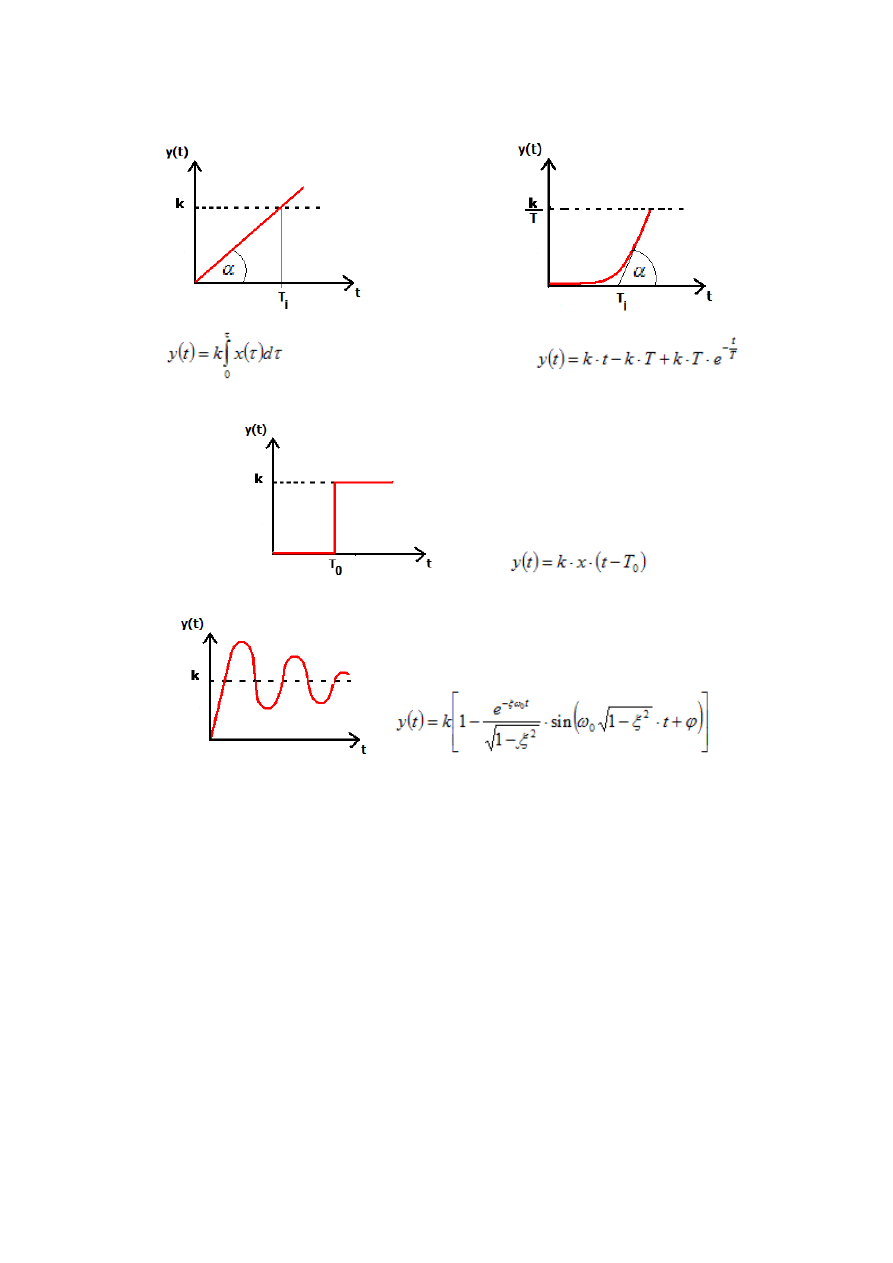
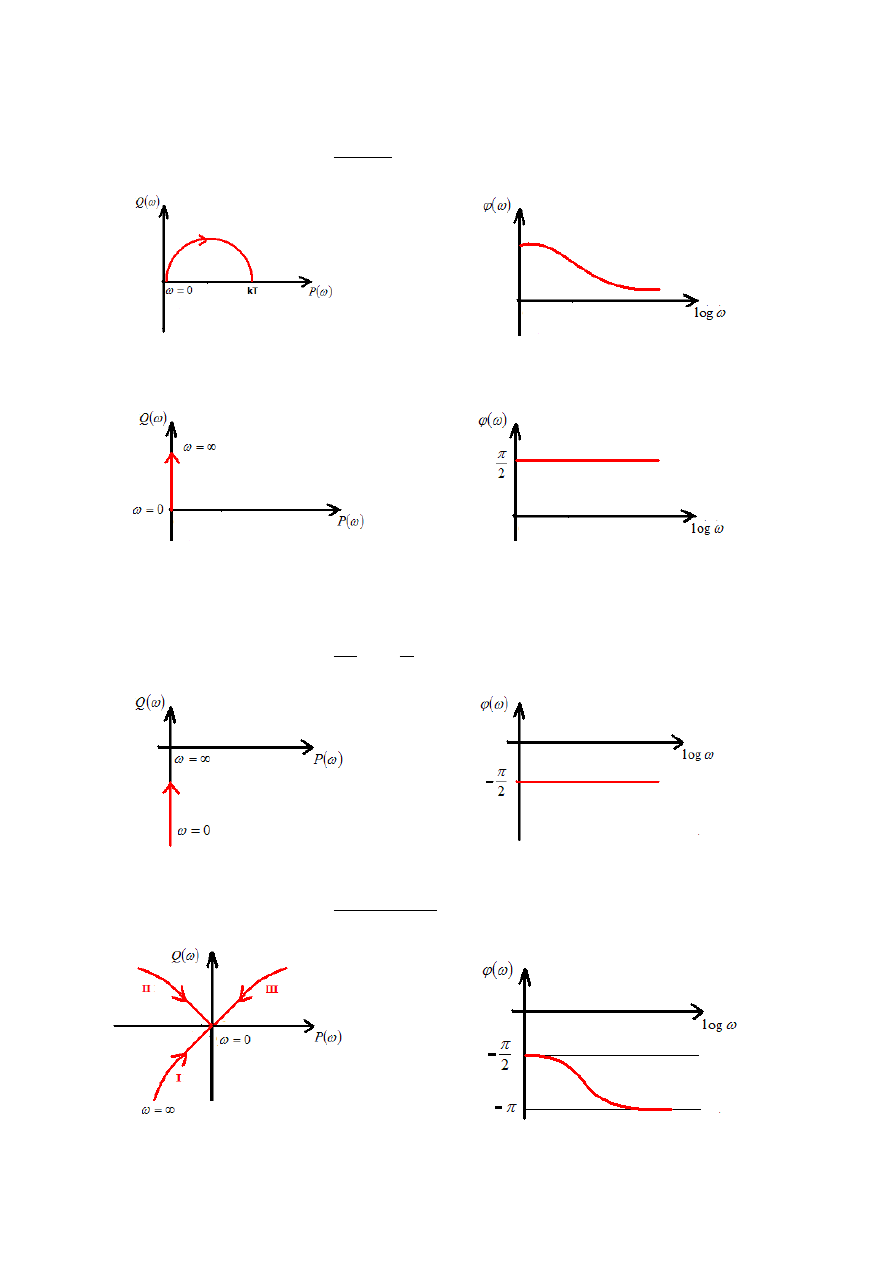
6. Charakterystyki częstotliwościowe
1. Człon proporcjonalny – nie zależy od częstotliwości – charakterystyka amplitudowo-fazowa:
jQ
P
j
G
k
j
G
2. Człon inercyjny I rzędu – charakterystyka amplitudowo-fazowa:
T
j
k
j
G
1
T – stała czasowa inercji; czas, po którym odpowiedź uzyska 60% wartości ustalonej
3. Człon inercyjny II rzędu – charakterystyka amplitudowo-fazowa:
2
2
2
1
2
2
2
2
2
1
2
2
1
2
1
2
1
1
T
T
T
T
T
T
jk
T
T
k
j
G
T
1
i T
2
są to stałe czasowe odpowiedzialne za I i II opóźnienie.
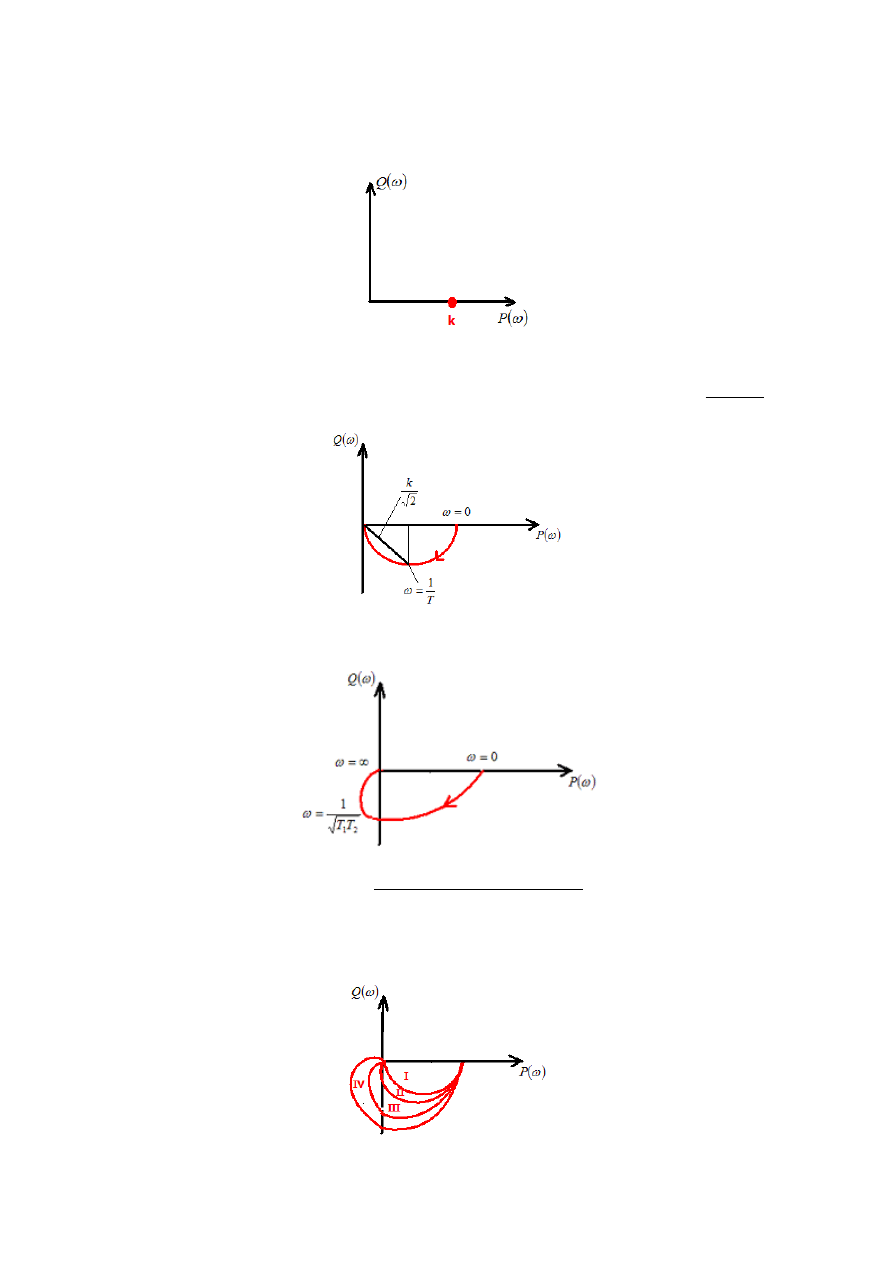
4. Człony inercyjne wyższych rzędów:
10
5. Człon różniczkujący:
Rzeczywisty
:
T
j
kj
j
G
1
Charakterystyka amplitudowo – fazowa
Charakterystyka fazowo – częstotliwościowa
Idealny
:
kj
j
G
j
G
arg
Charakterystyka amplitudowo – fazowa
Charakterystyka fazowo – częstotliwościowa
6. Człon całkujący:
Idealny
:
k
j
j
k
j
G
0
0
Q
Q
Charakterystyka amplitudowo – fazowa
Charakterystyka fazowo – częstotliwościowa
Rzeczywisty
:
1
2
2
2
T
jk
T
k
j
G
Charakterystyka amplitudowo – fazowa
Charakterystyka fazowo – częstotliwościowa
11
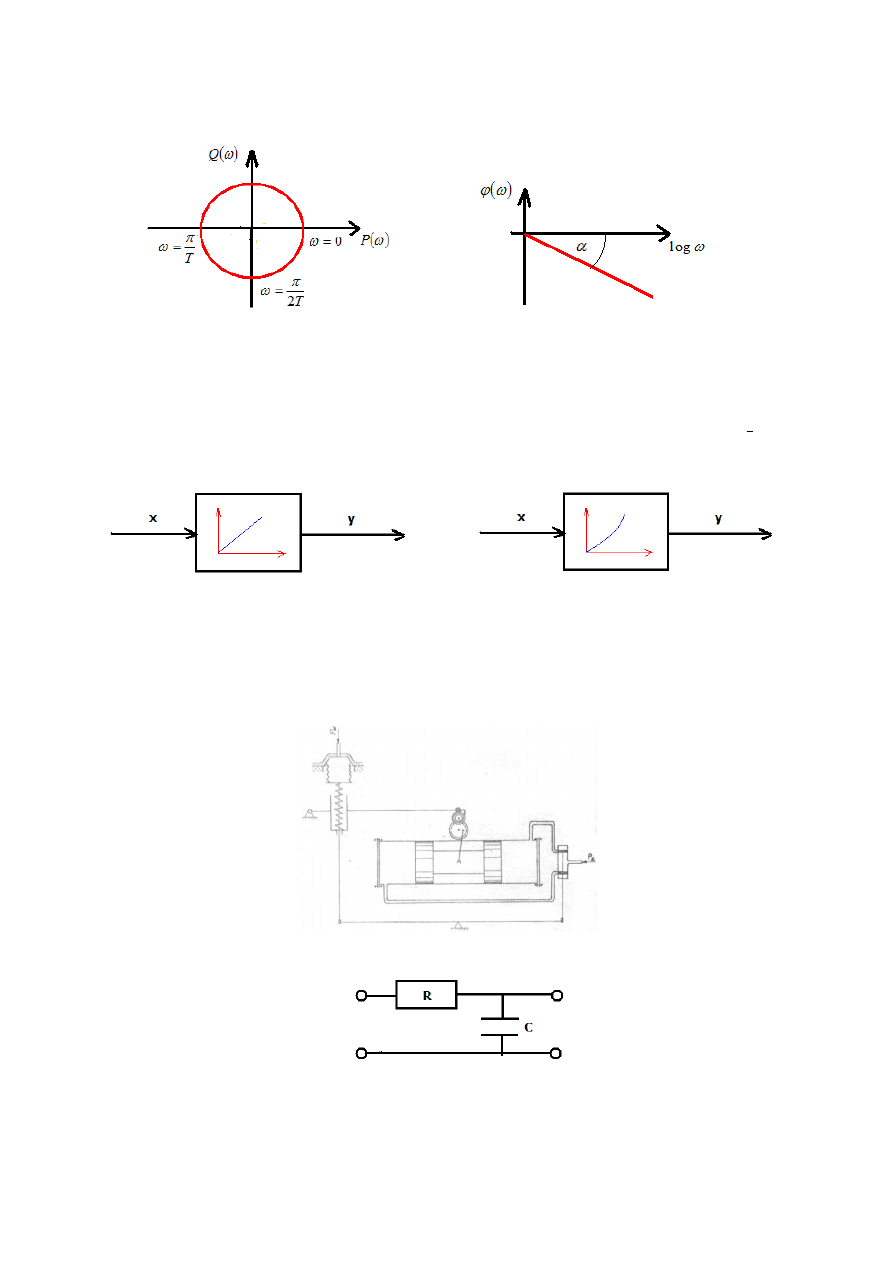
7. Człon Opóźniający:
T
j
e
j
G
T
tg
Charakterystyka amplitudowo – fazowa
Charakterystyka fazowo – częstotliwościowa
7. Człon całkujący
Idealny:
t
d
x
k
t
y
0
Rzeczywisty:
t
e
kT
kT
kt
t
y
Sygnał wyjściowy nie zmienia się jedynie przy zerowej wartości sygnału wejściowego
Przykład:
1. Siłownik Tłokowy: Przykład pneumatycznego siłownika tłokowego, w którym sygnał sterujący
p
w
zmienia się w zakresie normalnym, zaś wartość ciśnienia zasilającego p
z
może przyjmować
wartości od 0,6 - 1,0 MN/m
2. Urządzenie elektryczne całkujące:
12
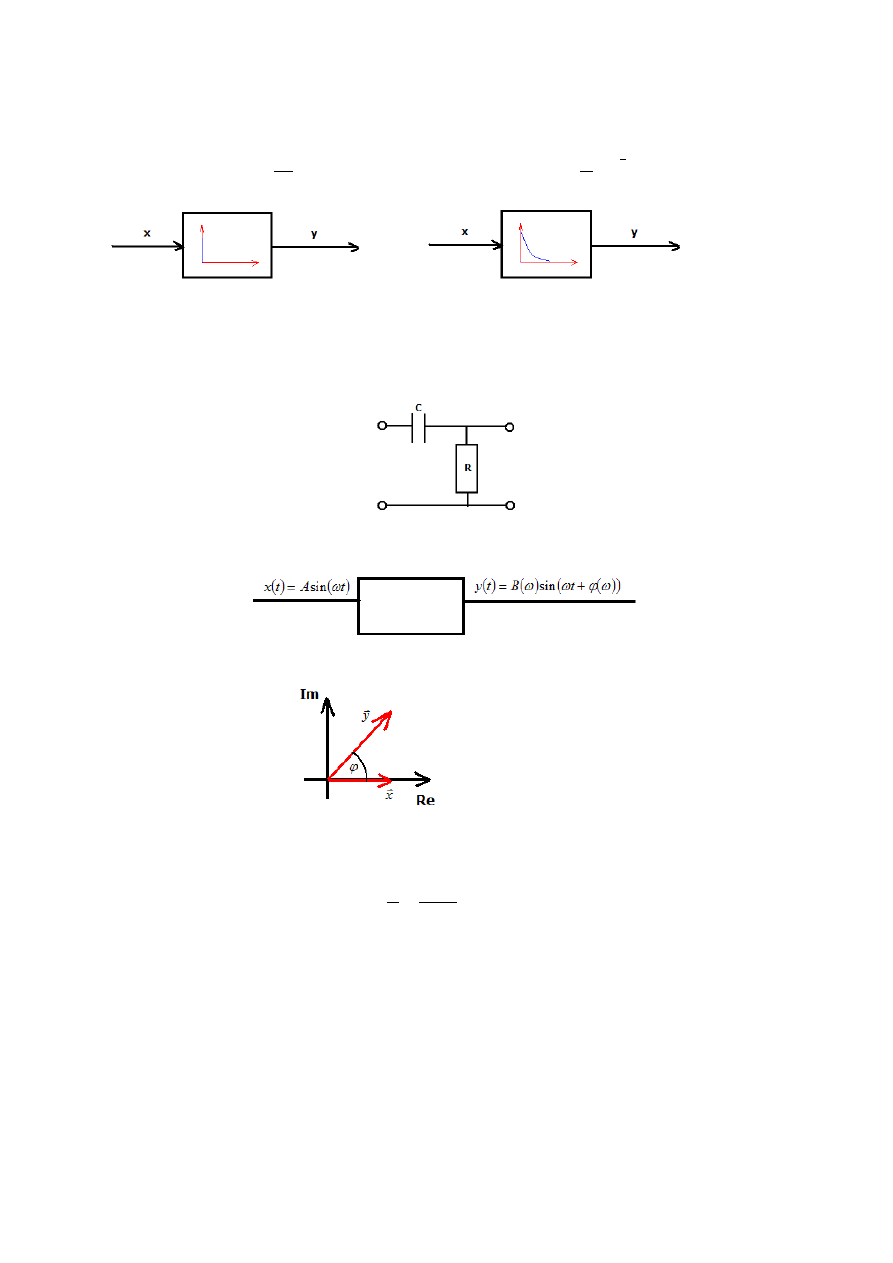
8. Człon różniczkujący
Idealny:
dt
dx
k
t
y
Rzeczywisty:
t
e
T
k
t
y
Przesunięcie wyjściowe jest proporcjonalne do prędkości przesunięć wejściowych (reaguje na zmianę
sygnału, wykazuje działanie wyprzedzające)
Przykład:
Urządzenie elektryczne różniczkujące:
9. Transmitancja widmowa i jej sens fizyczny
Amplituda A i kąt przesunięcia fazowego
na wyjściu zależą od pulsacji
t
j
t
j
e
B
t
y
Ae
t
x
Wektor przejściowy
y
opóźniony jest w fazie o kąt
w stosunku do
x
.
Transmitancja widmowa:
j
j
e
K
e
A
B
x
y
j
G
K
- wzmocnienie amplitudy (długość wektora amplitudy)
- przesunięcie fazowe
Sens fizyczny:
Dla dużych pulsacji mamy małe wzmocnienie i duże przesunięcie fazowe
Dla małych pulsacji wzmocnienie spada
Jeżeli na wejściu mamy sinusoidę, to na wyjściu też, ale będzie ona przesunięta w fazie

13
10. Wyjaśnić pojęcia
Układ stabilny:
Stabilność układu automatycznej regulacji jest to niezbędny warunek pracy układu automatycznej
regulacji mówiący o tym, że układ po wyprowadzeniu go ze stanu równowagi sam powraca do tego
stanu. Ponieważ
stan równowagi
może być różnie interpretowany stosuje się także definicję stabilności
wg. Laplace'a która mówi, że układ liniowy jest stabilny, jeżeli jego odpowiedź na wymuszenie
(zakłócenie) o ograniczonej wartości jest ograniczona.
Klasyczne kryteria stabilności układów ciągłych
Kryterium biegunów
– Wszystkie pierwiastki równania charakterystycznego układu
zamkniętego powinny być ujemne, czyli znajdować się w lewej półpłaszczyźnie płaszczyzny
zmiennej zespolonej
s
.
Kryterium odpowiedzi skokowej
– Układ zamknięty w odpowiedzi na skok jednostkowy
powinien osiągać stan ustalony w czasie dążącym do nieskończoności.
Kryterium Hurwitza
– Pierwiastki równania charakterystycznego układu zamkniętego będą
znajdować się w lewej półpłaszczyźnie płaszczyzny zmiennej zespolonej
s
(układ będzie
stabilny), jeśli spełnione zostaną 2 warunki:
o Wszystkie współczynniki równania charakterystycznego będą istnieć i mieć ten sam
znak,
o Wszystkie podwyznaczniki wyznacznika głównego (posiadającego
n
wierszy i
n
kolumn) muszą być większe od 0.
Kryterium Michajłowa
– Równanie charakterystyczne układu zamkniętego ma wszystkie
pierwiastki w lewej półpłaszczyźnie płaszczyzny zmiennej zespolonej
s
, jeśli przyrost
argumentu równania charakterystycznego w postaci widmowej
j
G
przy zmianie pulsacji
ω od 0 do
wynosi
2
n
, gdzie n jest stopniem równania.
Kryterium Nyquista
– Układ zamknięty jest stabilny, jeżeli charakterystyka amplitudowo-
fazowa układu otwartego nie obejmuje punktu (-1, j0).
Kryterium logarytmiczne Nyquista
– Układ zamknięty jest stabilny, jeżeli logarytmiczna
charakterystyka amplitudowa układu otwartego posiada wartość ujemną dla pulsacji
odpowiadającej przesunięciu fazowemu -π.
Układ niestabilny: wytrącony ze stanu początkowego już do niego nie wraca, ale oddala się od
niego coraz bardziej – np. śnieg na stoku i lawina.
Układ statyczny: układ regulacji (np. z regulatorem P lub PD), w którym uchyb ustalony jest
proporcjonalny do wartości wymuszenia w postaci skokowej funkcji Heaviside'a.
14
Funkcja skokowa Heaviside'a
(skok jednostkowy), jest funkcją nieciągłą, która przyjmuje wartość 0 dla
ujemnych argumentów i wartość 1 w
pozostałych przypadkach:
Często stosowanym symbolem, dla funkcji skokowej Heaviside'a jest
t
1
,
t
oznacza tu zazwyczaj
czas; jednak przy zastosowaniach z dziedziny mechaniki np. analizy statycznych obciążeń belek
argumentem tej funkcji jest nie czas, tylko długość belki. Funkcja ta jest używana w przetwarzaniu
sygnałów do reprezentowania sygnału włączającego się w danej chwili czasu, a także w mechanice do
reprezentowania obciążeń belek rozłożonych na pewnej części ich długości
Układ astatyczny: układ regulacji (np. z regulatorem PI lub PID), w którym uchyb ustalony jest
równy 0, niezależnie od wartości wymuszenia w postaci skokowej funkcji Heaviside'a. W układach
astatycznych występują uchyby ustalone przy pobudzeniach w postaci funkcji rosnących liniowo i
parabolicznie.
15
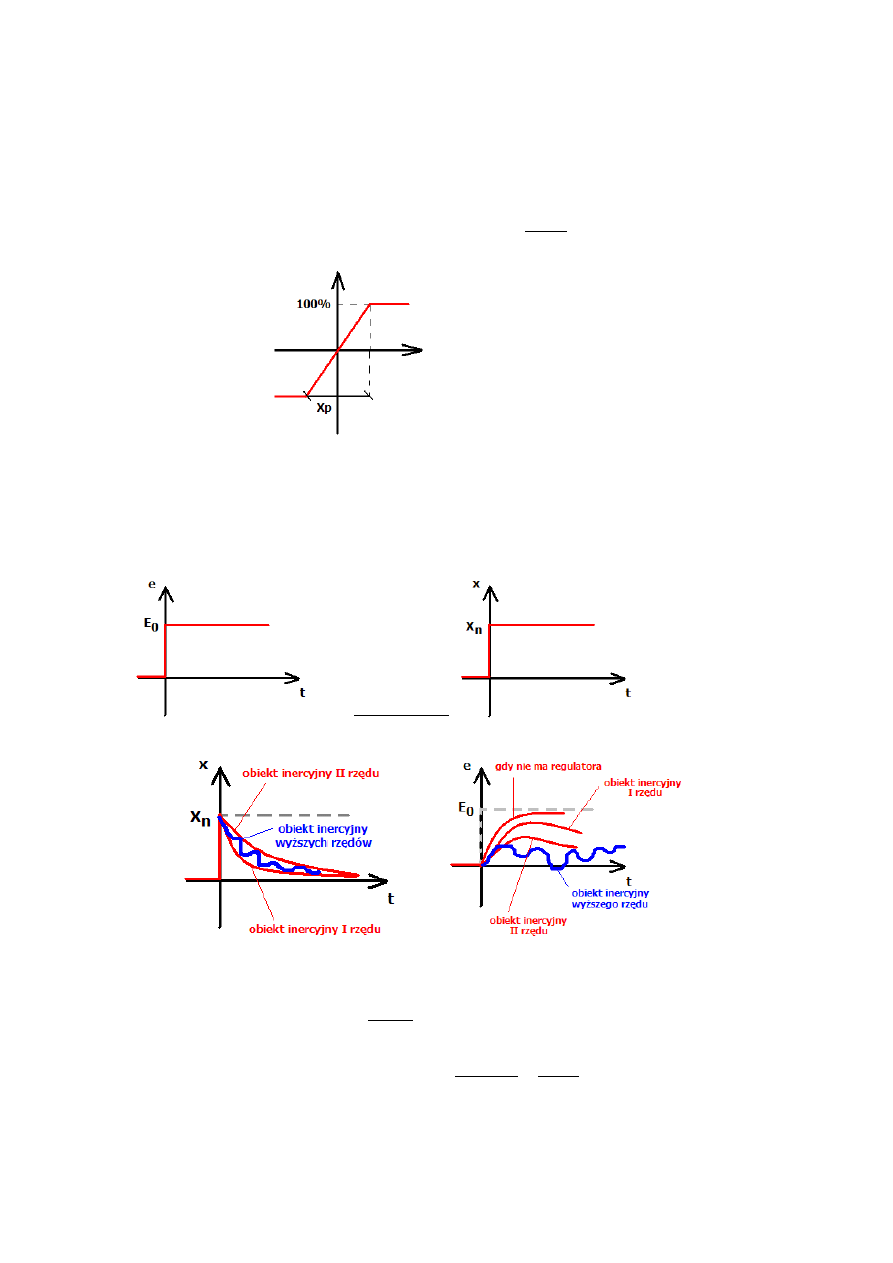
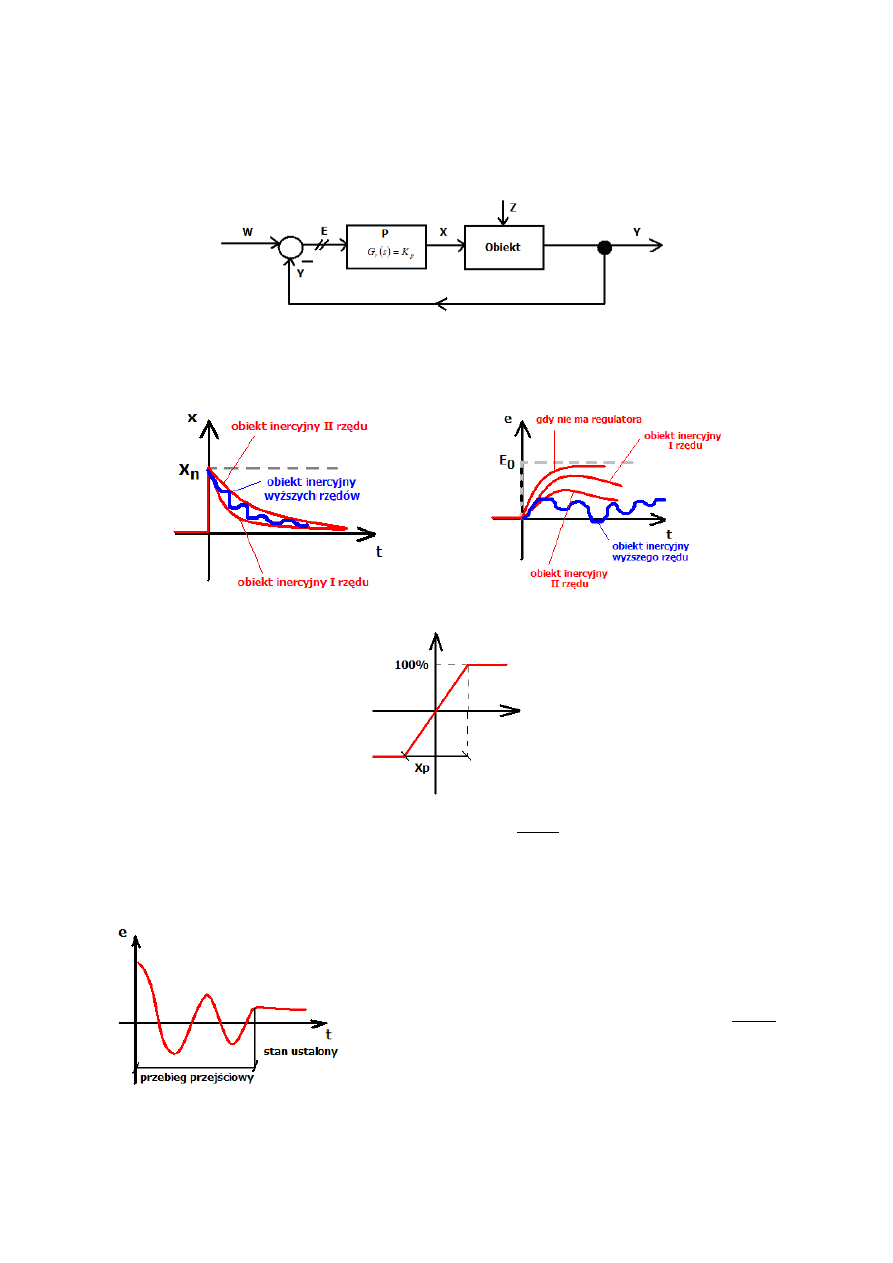
12. Zasada działania układu regulacji z regulatorem P
t
e
K
t
x
p
s
e
K
s
X
p
p
K
- współczynnik proporcjonalności
Charakterystyka statyczna (stan ustalony):
Jedyny parametr, który należy nastawić to
p
K
,
p
p
K
X
%
100
- zakres proporcjonalności
Gdy
%
100
1
p
p
X
K
Uchyb ustalony
– wartość uchybu, która pozostaje w układzie regulacji po zaniku przebiegów
przejściowych
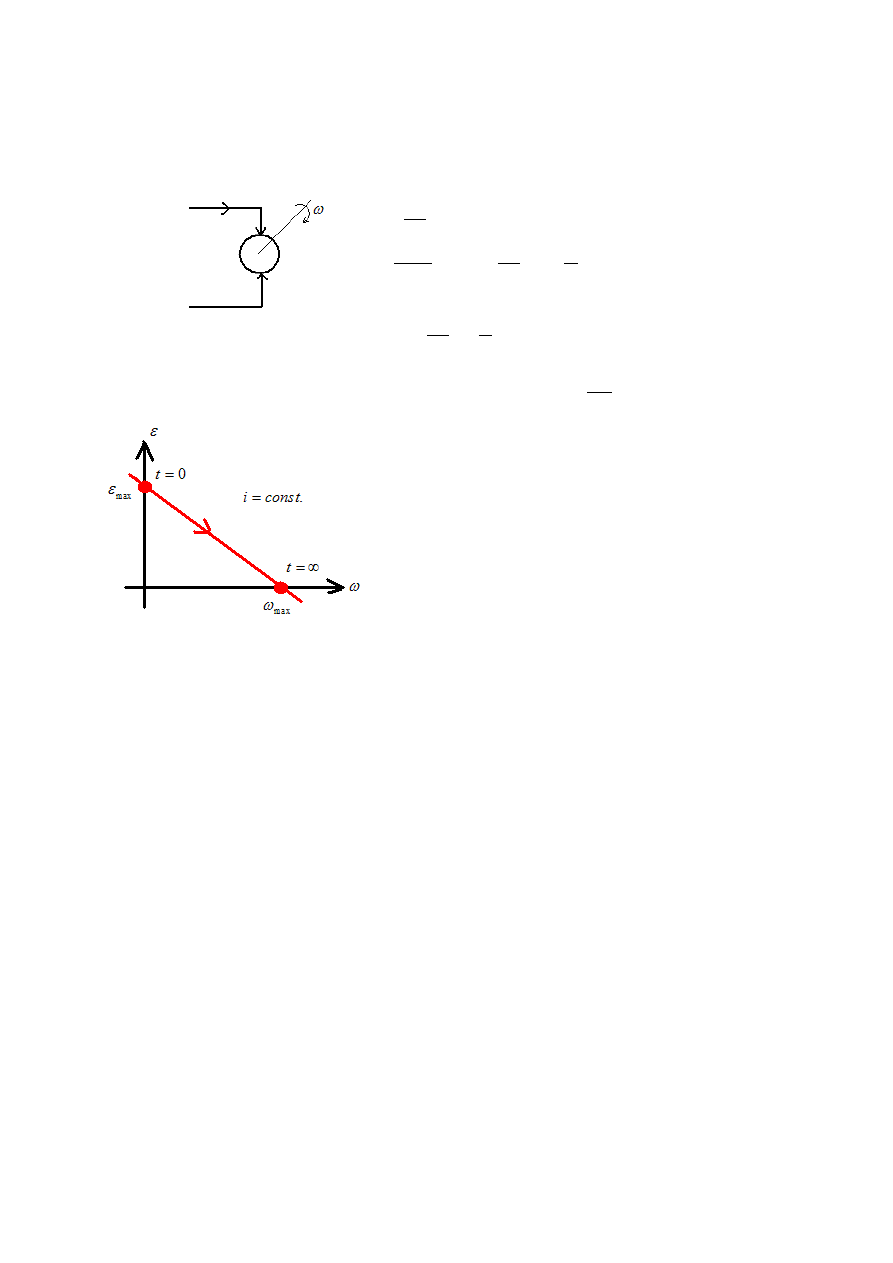
Charakterystyka dynamiczna (zależna od czasu):
Im mniejsze wzmocnienie obiektu
p
K
tym mniejszy uchyb ustalony.
ust
p
p
ust
K
K
e
e
1
t
y
t
t
e
t
t
1
0
.
1
0
const
dla
t
z
t
z
sT
k
G
ob
ob
1
1
Transmitancja układu
0
0
0
1
1
k
k
k
k
k
k
k
k
k
k
ob
r
ob
r
ob
r
0
e
- uchyb bez regulatora
r
k
- wzmocnienie regulatora
ob
k
- wzmocnienie obiektu

16
0
k
- wzmocnienie układu otwartego
k
- wzmocnienie układu zamkniętego
Z definicji:
u
y
k
u
y
- y ustalone
ob
r
u
u
u
k
k
k
k
k
k
k
k
e
const
k
kw
y
e
1
1
1
1
1
1
1
1
.
1
0
0
0
0
0
0
0
0
0
0
0
uchyb ustalony jest tym większy, im większa jest zmiana wartości zadanej i im mniejsze jest
wzmocnienie układu otwartego. Układ jest tym bardziej stabilny, im mniejszy jest uchyb ustalony.
Zwiększenie wzmocnienia polepsza dokładność układu (małe
u
e
), ale pogarsza stabilność (objawia się
to oscylacyjnością),natomiast zmniejszenie
p
K
prowadzi do polepszenia stabilność kosztem
dokładności.
13. St
abilność – interpretacja fizyczna i definicja
Układ nazywamy stabilnym, jeżeli powraca do swojego stanu równowagi po ustaniu
zakłóceń. Układ jest niestabilny, jeżeli pod wpływem zakłóceń zacznie się zachowywać w sposób
niekontrolowany. Układy linowe mają jeden stan równowagi, a nieliniowe mogą mieć ich więcej.
Istnieją układy mniej i bardziej stabilne, jedne wrócą do położenia równowagi a inne nie. Układy
nieliniowe mają to do siebie, że pod wpływem zakłócenia mogą przyjąć inny stan równowagi. Jeżeli
układ linowy jest stabilny, to powraca do stanu równowagi niezależnie od wielkości zakłócenia.
Układ liniowy niestabilny nie wraca do stanu równowagi, a każde, niewielkie wymuszenie zakłóca
jego równowagę. Jeżeli układ nieliniowy jest niestabilny (tzn. stabilny lokalnie) topazy dużych
zakłóceniach nie wraca DOS tanu równowag, a przy małych może.
Przykładem układu niestabilnego jest wahadło matematyczne. Kiedy „kulka” znajduje się u
góry, mamy do czynienia z niestabilnym punktem równowagi (stan równowagi nietrwałej), a kiedy
„kulka” znajduje się na dole, mamy stabilny punkt równowagi (stan równowagi trwałej).
17
14. Płaszczyzna fazowa, trajektoria fazowa
Aby ściśle określić, co to jest stabilność, wyprowadza się współrzędne fazowe:
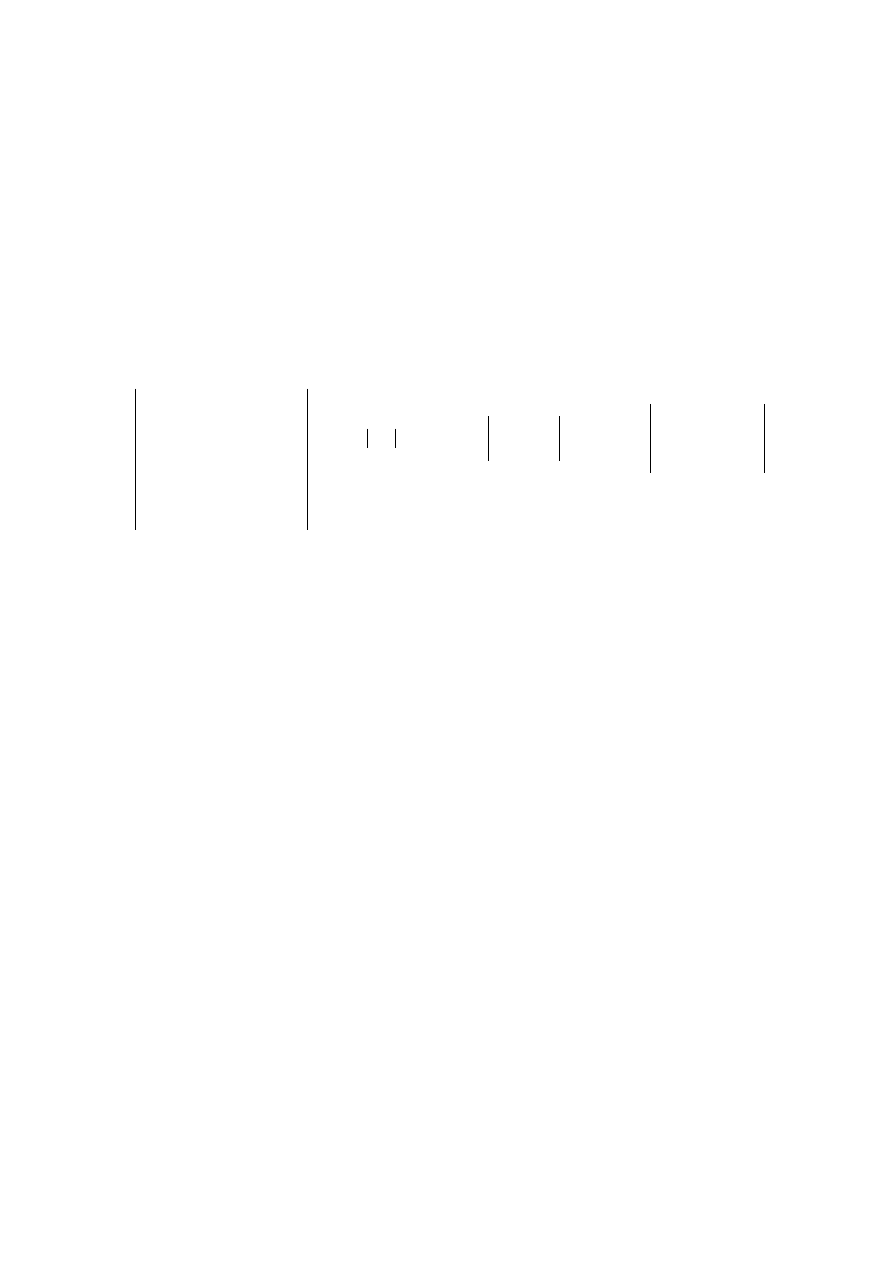
1. Przykład: Silnik
1
2
1
2
1
2
1
2
1
x
y
f
i
I
C
x
t
x
a
t
i
a
t
x
t
x
y
f
t
i
I
C
t
x
dt
t
dx
t
i
C
t
f
dt
d
I
m
m
m
I – moment bezwładności
t
t
x
1
- prędkość
dt
d
t
x
2
- przyspieszenie
max
max
max
0
Płaszczyzna x
1
i x
2
nazywana jest płaszczyzną fazową lub
płaszczyzną stanu:
2
1
x
x
Prosta
max
max
nazywana jest trajektorią fazową.
2. Przykład: Przestrzeń 3D
Ruch swobodny – ruch, w którym nie ma żadnego oddziaływania zewnętrznego. Otrzymujemy go
wtedy, gdy np. wyłączymy prąd w silniku – silnik się kręci bez wymuszenia. Jeżeli układ jest
stabilny to punkt równowagi jest w początku układu współrzędnych tzn. przy zerowym zakłóceniu
i wymuszeniu, trajektorie zbiegają się w jednym punkcie.
18
15. Warunek konieczny i wystarczający stabilności
Aby układ był stabilny, wszystkie pierwiastki jego równania charakterystycznego muszą mieć
ujemne części rzeczywiste. Jeżeli układ jest oscylacyjny, pierwiastki posiadają części urojone. Jeżeli
współczynnik tłumienia zawiera się w przedziale
1
0
to układ ma właściwości oscylacyjne, a
jego pierwiastki są zespolone i sprzężone ze sobą.
jb
a
s
jb
a
s
2
1
.
Części urojone decydują o oscylacyjności, a pierwiastki rzeczywiste decydują o stabilności
układu. Jeżeli części rzeczywiste leżą po lewej stronie układu to układ jest stabilny, a jeśli chociaż
jedne leży po prawej stronie, to układ jest niestabilny.
Kryterium Hurwitza:
0
2
1
1
2
3
4
5
1
2
3
1
0
0
0
a
a
a
a
a
a
a
a
a
a
a
a
a
a
W
n
n
n
n
n
n
n
n
n
n
n
3
1
4
2
5
3
1
1
2
3
1
2
1
1
0
n
n
n
n
n
n
n
n
n
n
n
n
n
a
a
a
a
a
a
a
a
W
a
a
a
a
W
a
W
Dodatnia wartość współczynników równania charakterystycznego badanego układu sterowania
jest warunkiem koniecznym stabilności. Dla wielomianów pierwszego i drugiego stopnia jest to
zarazem warunek dostateczny.
19
16. Problem stabilności i uchybu ustalonego przy doborze
regulatora
Przypuśćmy, że charakterystyka amplitudowo – fazowa układu otwartego przebiega w pobliżu
punktu
0
,
1 j
, lecz go nie obejmuje, więc układ zamknięty jest stabilny. Może się jednak zdarzyć,
że na skutek przypadkowych zmian parametrów, układ ten przekroczy granicę stabilności i wystąpią w
nim rosnące oscylacje. Aby uniknąć sytuacji tego rodzaju wprowadza się zapas stabilności definiowany
jako zapas modułu i zapas fazy. Zapas Modułu: Wartość, o jaką trzeba zmienić moduł transmitancji
układu otwartego, przy niezmienionym jej argumencie, aby charakterystyka amplitudowo – fazowa
układu otwartego przechodziła przez punkt
0
,
1 j
, czyli aby układ zamknięty znalazł się na granicy
stabilności. Zapas modułu wyrażony, w dB:
j
G
M
0
arg
- częstotliwość, dla
której przesunięcie fazowe transmitancji układu otwartego
j
G
0
osiąga
.Zapas Fazy: Wartość,
o jaką trzeba zmienić argument transmitancji układu otwartego przy zachowaniu niezmiennego jej
modułu, aby układ zamknięty znalazł się na granicy stabilności. Zapas fazy
to różnica między
przesunięciem fazowym równym
a wartością argumentu transmitancji
j
G
0
przy
częstotliwości odcięcia
0
:
1
arg
0
0
0
j
G
j
G
W dobrze tłumionych układach, tj. niepodatnych na samowzbudzenie, zapas modułu powinien wynosić
dB
12
6
, a zapas fazy
0
60
30
Problem dokładności statycznej:
Związany jest z występowaniem uchybu w stanie ustalonym. Wartość tego uchybu:
o Zależy od charakteru wymuszenia
t
y
0
, wartości współczynnika wzmocnienia układu
otwartego i maleje ze wzrostem tego współczynnika.
o Może być zmniejszona przez zwiększenie rzędu astatyzmu układu otwartego oraz przez
wykorzystanie pochodnych uchybu sterowania
20
17.
Porównać regulatory typu P, I, PC, PI, PD, PID
Regulator Proporcjonalny P:
t
y
t
t
e
t
e
K
t
x
p
Charakterystyki Dynamiczne
:
Charakterystyka statyczna
:
p
K
- współczynnik proporcjonalności
p
p
K
X
%
100
- zakres proporcjonalności
Uchyb ustalony e
u
to wartość uchybu, która powstaje w układzie regulacji po zaniku przebiegów
przejściowych.
Wzmocnienie regulatora:
p
r
K
K
Wzmocnienie obiektu:
ob
K
Transmitancja obiektu:
sT
K
G
O
ob
1
1
Wzmocnienie układu otwartego:
ob
r
O
K
K
K
Transmitancja układu otwartego:
ob
r
O
G
G
G
21
Wzmocnienie układu zamkniętego:
ob
r
ob
r
O
O
K
K
K
K
K
K
K
1
1
ob
r
u
u
u
k
k
k
k
k
k
k
k
e
const
k
k
y
e
1
1
1
1
1
1
1
1
.
1
0
0
0
0
0
0
0
0
0
0
0
Uchyb ustalony rośnie, gdy wartość zadana się zwiększa, a
O
K
maleje.
Zwiększenie wzmocnienia polepsza dokładność układu (małe
u
e
), ale pogarsza stabilność (objawia się
to oscylacyjnością),natomiast zmniejszenie
p
K
prowadzi do polepszenia stabilność kosztem
dokładności.
Regulator proporcjonalny wytwarza sygnał sterujący x(t) liniowo zależny od uchybu regulacji e(t).
uchyb ten jest proporcjonalny do wartości zakłóceń i zakłóceń przybliżeniu odwrotnie proporcjonalny
do wzmocnienia regulatora. Jest on członem bezinercyjnym, ma więc charakterystykę skokową.
Zalety i Wady:
o Szybka regulacja przy niezbyt dużej dokładności statycznej
o Jego zastosowanie zmniejsza wpływ zakłóceń, nie eliminuje ich jednak całkowicie.
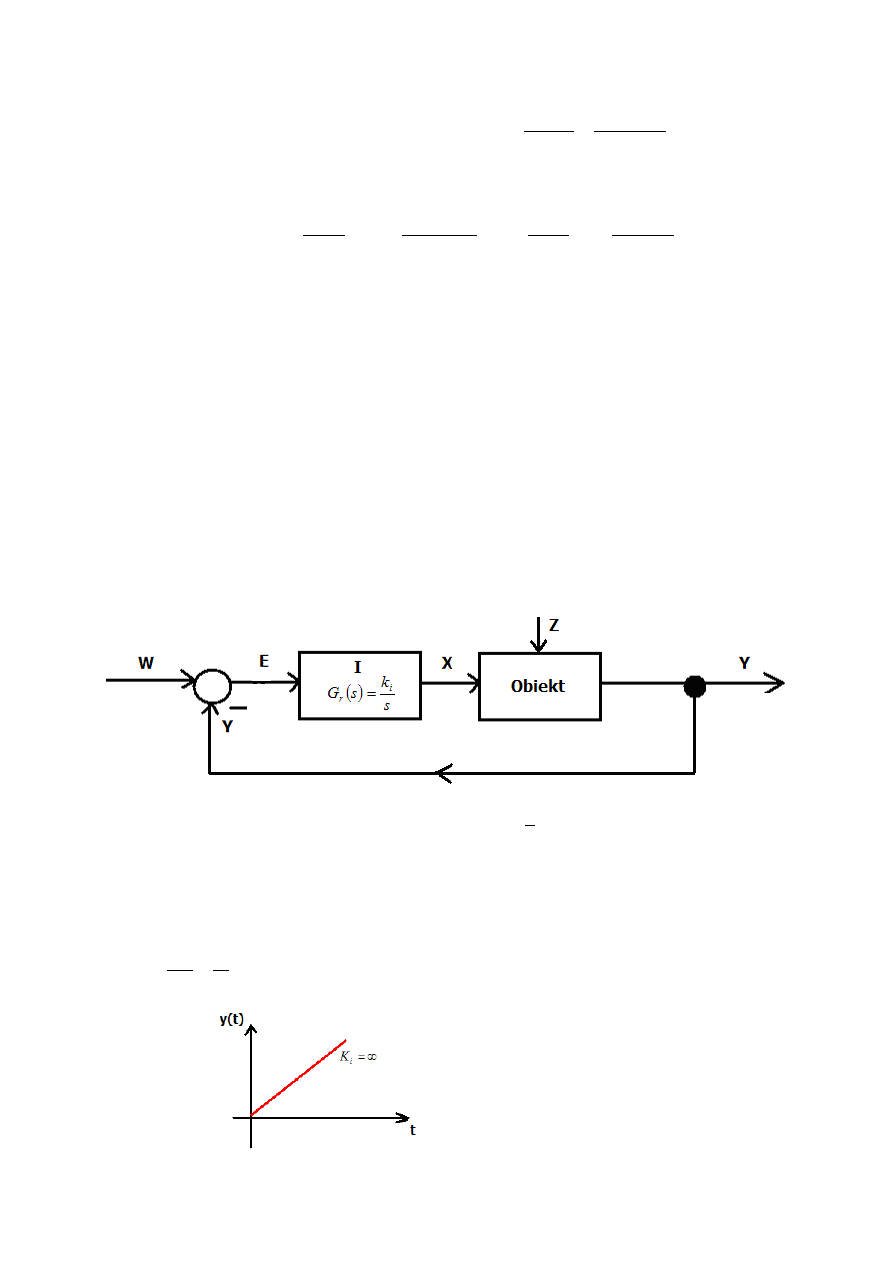
Regulator Całkujący I:
s
e
K
s
s
X
d
e
K
t
x
i
t
i
1
0
Mamy do czynienia ze stałym uchybem na wejściu, a na wyjściu sygnał wzrasta do momentu spadku
uchybu do zera. Dopiero przy zerowym uchybie sterowanie przestaje się zmieniać. Wzmocnienie
regulatora całkującego można uznać za nieskończone.
i
p
i
T
K
K
1
T
i
– czas zdwojenia, K
i
– wzmocnienie regulatora całkującego
Regulator całkujący wytwarza sygnał sterujący
proporcjonalny do uchybu regulacji e(t).
22
Zalety i Wady:
o Jest zdolny doprowadzić uchyb do zera (poprawia dokładność, ale pogarsza stabilność)
o Znacznie pogarsza stabilność i wnosi do układu opóźnienie fazowe
o Zaleta jest astatyzm układu (zwiększenie dokładności statycznej)
o Wydłużenie czasu regulacji.
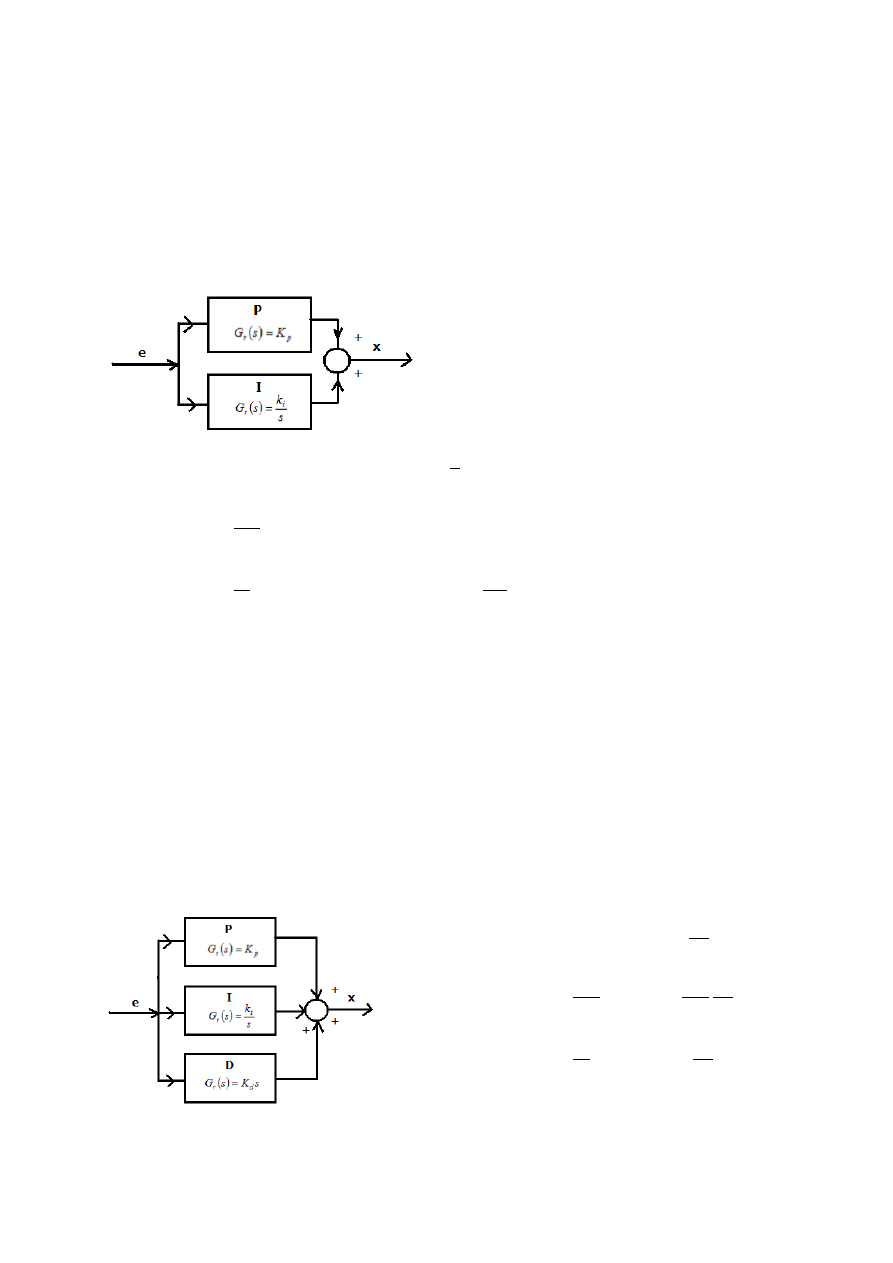
Regulator Proporcjonalno
– Całkujący PI:
s
T
K
s
G
d
e
T
t
e
K
t
x
d
e
K
K
t
e
K
t
x
K
s
K
s
G
d
e
K
t
e
K
t
x
i
p
r
t
i
p
t
p
i
p
i
p
r
t
i
p
1
1
1
1
0
0
0
Zalety i wady:
o Czas regulacji krótszy niż dla regulatora całkującego ale dwukrotnie dłuższy niż regulatora
proporcjonalnego
o Szybsza regulacja przy zachowaniu astatyzmu układu (stabilność)
o Zerowy uchyb regulacji (duża dokładność statyczna)
Znaczenie członów:
o P – zmniejsza wpływ zakłóceń, przyspieszenie reakcji (szybszy czas regulacji)
o I – doprowadzenie uchyb do zera, astatyzm układu.
Regulator Proporcjonalno
– Całkująco - Różniczkujący PID:
dt
de
T
d
e
T
t
e
K
t
x
dt
de
K
K
d
e
K
K
t
e
K
t
x
dt
de
K
d
e
K
t
e
K
t
x
d
t
i
p
p
d
t
p
i
p
d
t
i
p
0
0
0
1
23
s
sE
T
s
E
s
T
s
E
K
s
X
d
i
p
1
Wzór regulacji za pomocą PID
Z członem różniczkującym idealnym:
s
T
s
T
K
s
G
d
i
p
r
1
1
Z członem różniczkującym rzeczywistym:
sT
s
s
T
K
s
G
i
p
r
1
1
1
Powszechnie nie stosuje się regulatorów różniczkujących, różniczkujących jedynie człony
różniczkujące. Strojenie regulatora PID polega na ustawieniu odpowiednich parametrów
p
K
,
i
K
,
d
K
, lub
p
K
,
i
T
(czas zdwojenia – czas, po którym wartość odpowiedzi uchybu jest podwójna),
d
T
(czas wyprzedzenia – czas, po którym składowa proporcjonalna zrówna się ze składową
różniczkującą).
Zalety i wady:
o Najbardziej uniwersalny typ regulatora, możliwy do dostosowania do wymagań różnych
obiektów, przy odpowiedniej zmianie zastawów.
o Szybki czas reakcji (czas wyprzedzenia)
o Dobra stabilność i dokładność statyczna
Znaczenie członów:
o P – zmniejsza wpływ zakłóceń, przyspieszenie reakcji (szybszy czas regulacji), poprawia
stabilność
o I – doprowadzenie uchyb do zera, astatyzm układu, większa dokładność statyczną,
o D – zwiększa czas reakcji (czas wyprzedzenia), poprawia stabilność
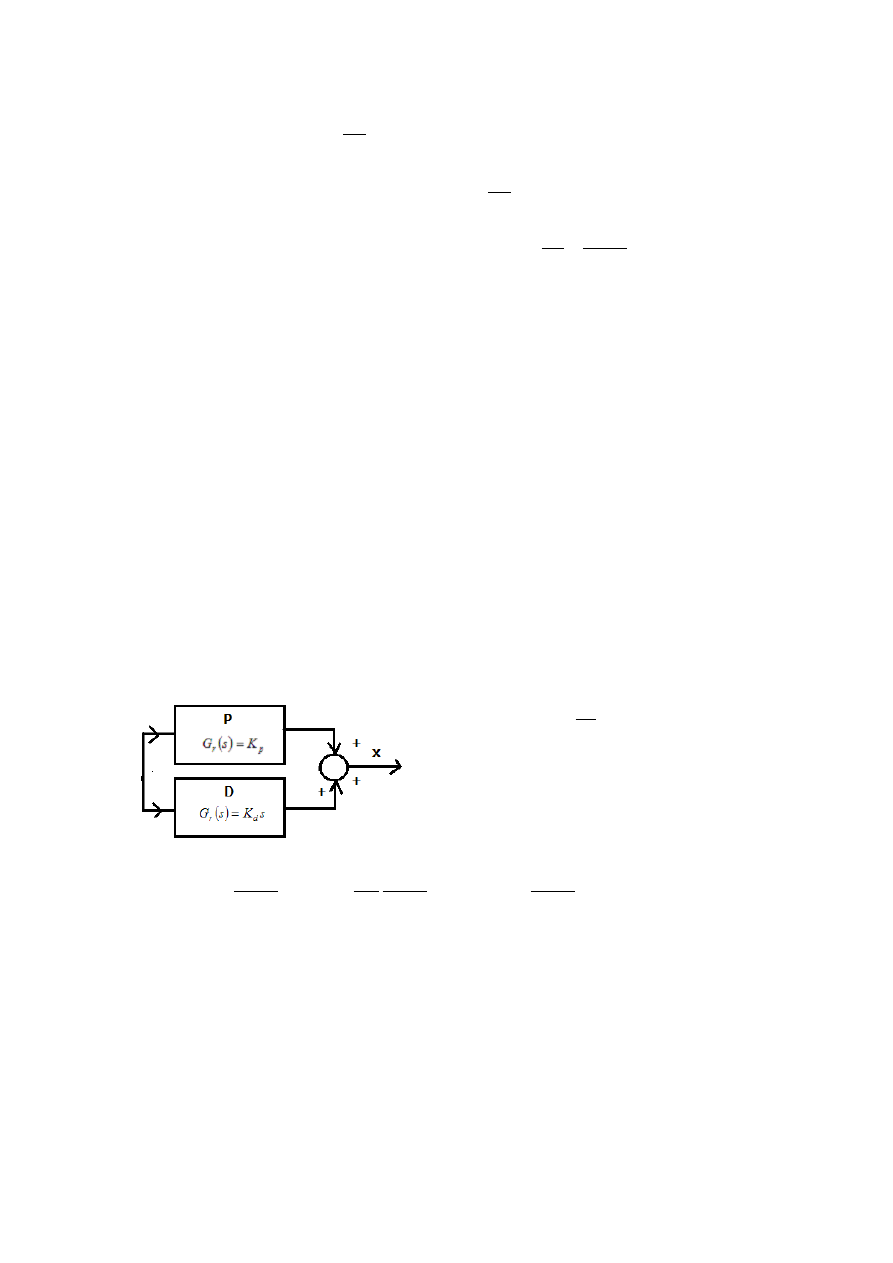
Regulator Proporcjonalno
– Różniczkujący PD:
s
se
K
s
e
K
s
X
dt
de
K
t
e
K
t
x
d
p
d
p
Z członem różniczkującym idealnym:
s
K
K
s
G
d
p
r
Z członem różniczkującym rzeczywistym:
sT
s
T
K
sT
s
K
K
K
sT
s
K
K
s
G
d
p
p
d
p
d
p
r
1
1
1
1
1
Zalety i wady:
o
Szybki czas reakcji
o
Dobra stabilność
o
Mała dokładność
Człony całkujący i różniczkujący w łączeniu szeregowym dają w rezultacie regulator proporcjonalny.
24
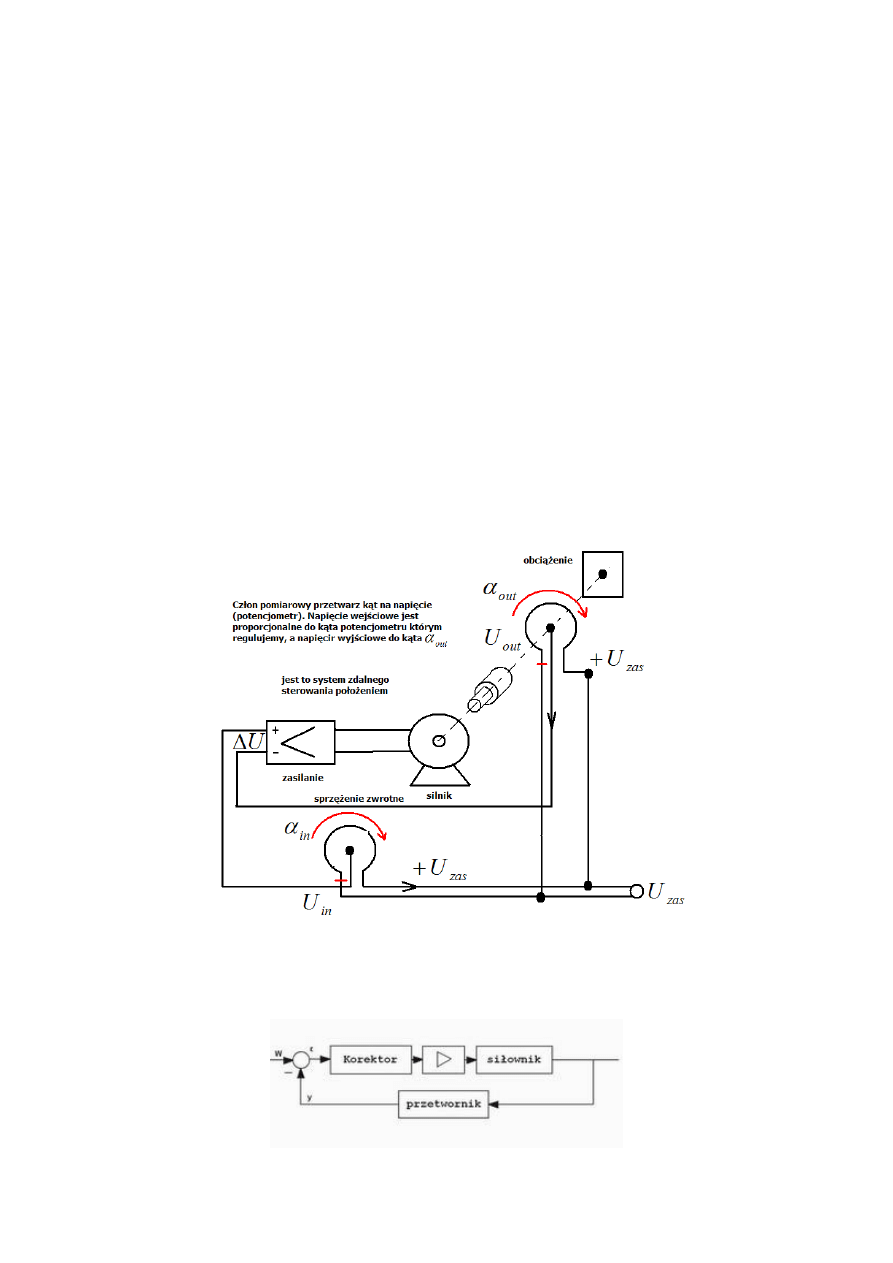
18. Serwomechanizmy
– schemat, działanie, przykłady
Jest to zamknięty układ sterowania przemieszczeniem (układ automatyki), o strukturze
typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik
bieżącym sygnałem wyjściowym i powstały w ten sposób uchyb podawany jest na człon korekcyjny, a
dalej na wzmacniacz. Wzmocniony sygnał trafia do siłownika, którego przemieszczenie jest wartością
wyjściową układu. Zadaniem serwomechanizmu jest likwidacja błędów regulacji (uchybu
przemieszczenia), powstających na skutek zmian wielkości wzorcowej, a więc klasyfikujemy go jako
układ nadążny. Serwomechanizm ma strukturę typowego układu regulacji, nie steruje jednak
obiektem technologicznym, lecz siłownikiem w celu usprawnienia działania toru wykonawczego.
Specyfikacją serwomechanizmów jest całkujący charakter siłownika o dynamice nie
utrudniającej regulacji, ale wnoszącej nieliniowość. Zmusza to do stosowania korektorów
proporcjonalnych, o dużym wzmocnieniu, a nawet wzmacniaczy trójpołożeniowych. Całkujący
charakter siłownika zapewnia, teoretycznie, zerowy błąd statyczny. Duże wzmocnienie w torze
głównym poprawia nadążanie układu za zmianami wzorca, ale zmniejsza zapas stabilności. Sytuację
można poprawić wprowadzając korektor regulator proporcjonalno-różniczkujący (PD).
Schemat ideowy ze sprzężeniem zwrotnym i członem pomiarowym:
out
in
U
U
U
Obrót silnika następuje o ten sam kąt, co obrót potencjometru. W układzie na
skutek bezwładności silnika występują drgania oscylacyjne.
Schemat blokowy:
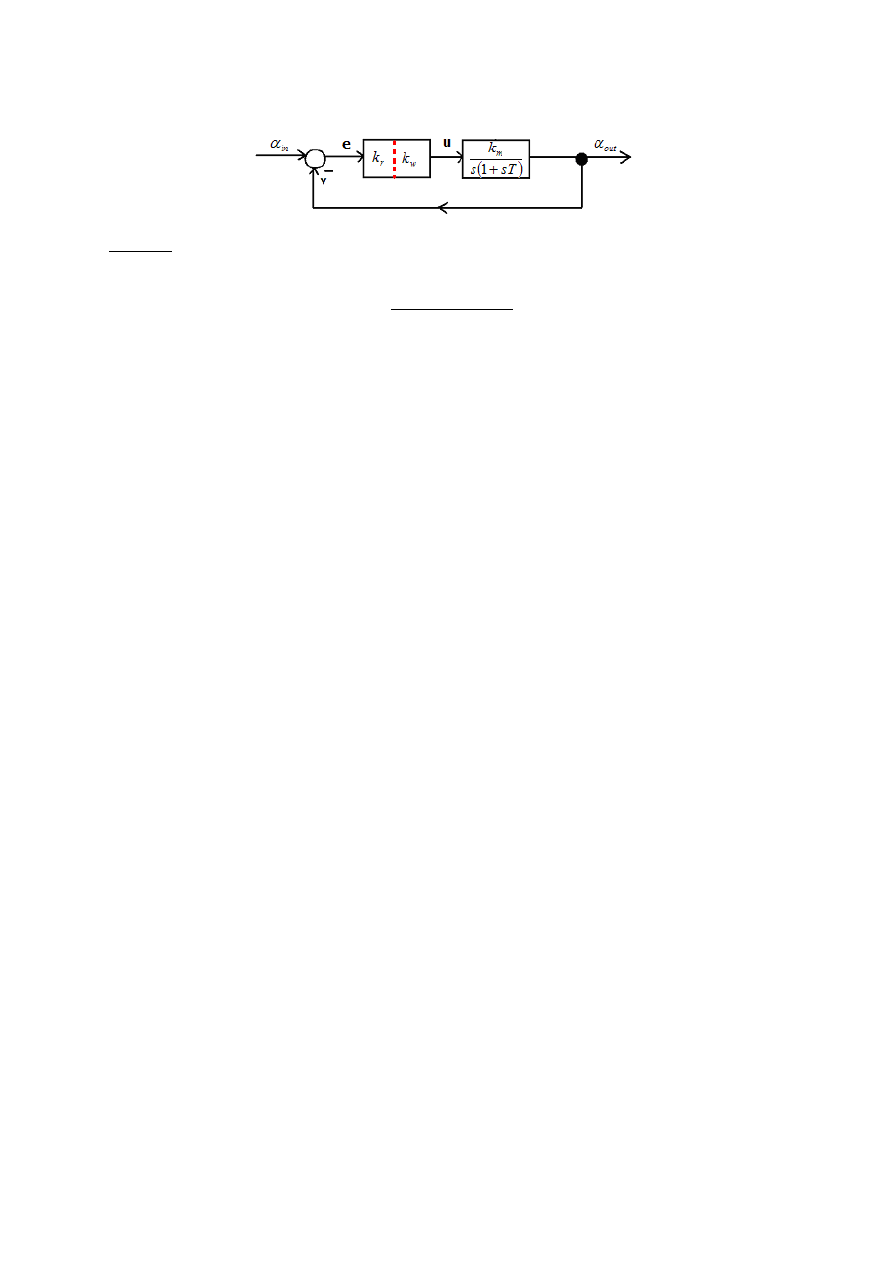
25
sT
s
k
m
1
- silnik z przekładnią i obciążeniem
Transmitancja serwomechanizmu:
1
2
0
2
0
s
T
s
T
k
s
G
s
; k – wzmocnienie w stanie ustalonym
1
serwomechanizm oscylacyjny
1
serwomechanizm nieoscylacyjny.
26
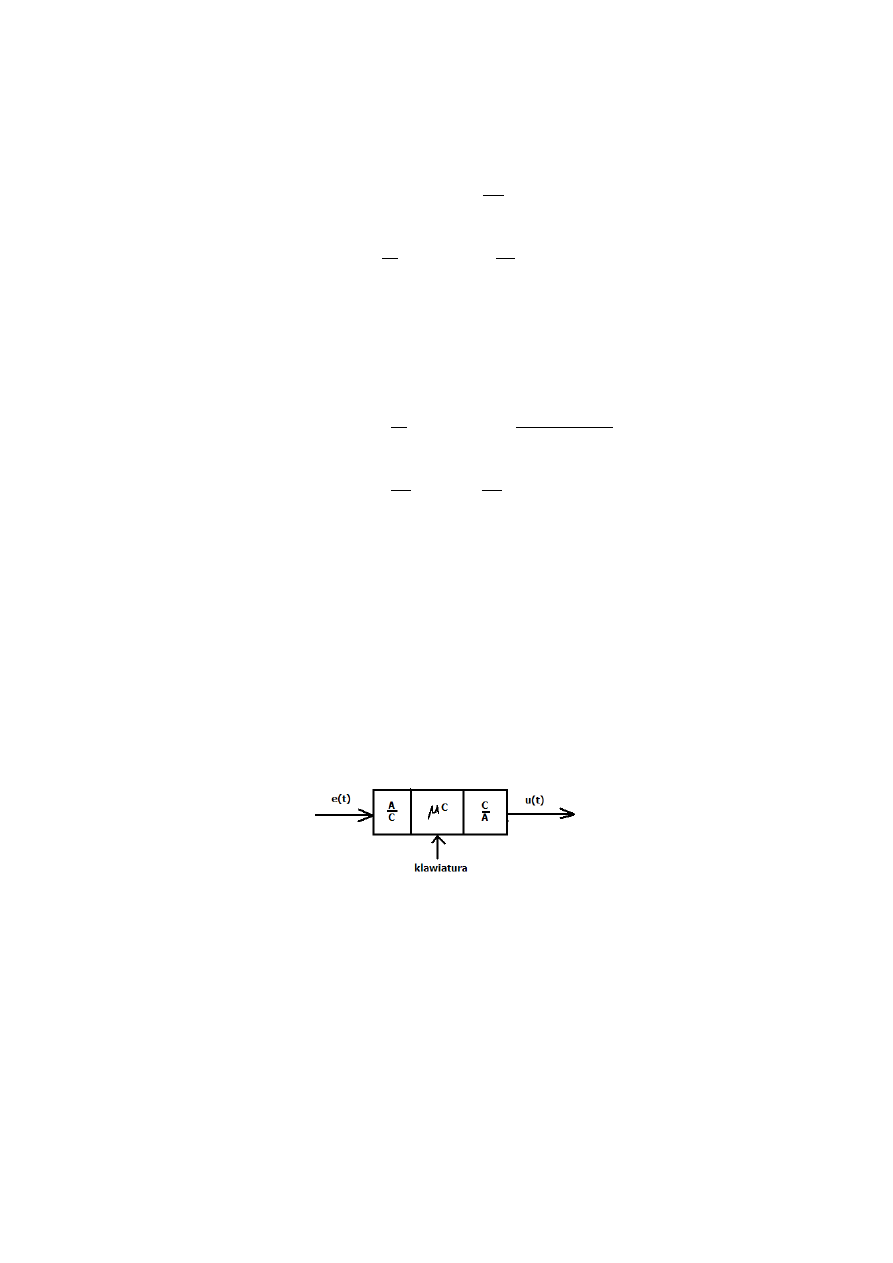
19. Regulatory cyfrowe, przykłady
Regulator cyfrowy: działa w oparciu o technikę komputerową i procesory.
Transmitancja operatorowa:
d
p
r
sT
sT
k
s
G
1
1
Zapis matematyczny:
dt
de
T
d
e
T
t
e
k
t
u
d
i
p
1
Cyfrowe urządzenia działają na zasadzie próbkowania sygnału uchybu z dużą częstotliwością (GHz)
Uchyb w chwili t
1
:
1
t
e
;
p
T
t
e
1
;
p
T
t
e
2
1
Uchyb:
0
e
;
1
e
; … ;
n
e
1
1
1
0
0
n
e
n
e
T
T
k
e
T
T
n
e
k
n
u
T
n
e
n
e
T
T
k
e
T
n
e
k
n
u
p
d
n
k
i
p
p
p
d
n
k
p
i
p
Do zsumowania wystarczy znajomość ostatniej sumy i bieżącej próbki. Potrzebne SA jedynie
dwie komórki pamięci i jedna do poprzedniej próbki.
suma
a
aktua
probka
przezaca
suma
biezaca
n
e
n
S
ln
1
Regulator cyfrowy jest nieciągły, ale można go traktować jako ciągły dla dużych częstotliwości
próbkowania.
Realizacja programowania:
A/C - przetwornik analogowo – cyfrowy
C/A – przetwornik cyfrowo – analogowy

27
20. Sterowniki PLC
– budowa i programowanie
Sterownik jest urządzeniem automatyki odpowiedzialnym za sterowanie wieloma wejściami
obiektów na podstawie pomiarów wielu wyjść sterownika. W naszym przypadku sterownik pełni role
regulatora PID, a zatem regulatora proporcjonalnego całkująco – różniczkującego, dla którego sygnał
x(t) zmienia się następująco:
dt
de
T
k
d
e
T
k
t
e
k
t
x
d
p
t
i
p
p
0
)
(
)
(
)
(
Wejścia i wyjścia opisane są na listwie zaciskowej oraz przy wskaźnikach ich stanu. Te
alfanumeryczne symbole identyfikują adresy wejść/ wyjść, do których podłączone są urządzenia.
Zewnętrzne adresy używane są przez CPU do określenia, które wejścia są w stanie wysokim i które
wyjścia powinny być załączone lub wyłączone.
Urządzenia wejściowe, takie jak przełączniki, przyciski oraz inne czujniki dwustanowe,
podłączane są do listwy zaciskowej znajdującej się pod dolną osłoną PLC. Urządzenia wyjściowe, takie
jak przekaźniki, są podłączane do listwy zaciskowej znajdującej się pod górną osłoną PLC.
Programowanie - Do tworzenia programów roboczych sterowników PLC jest stosowane specjalne
oprogramowanie. Program użytkowy najczęściej składa się z pewnej liczby instrukcji ułożonych w
odpowiednim porządku logicznym odzwierciedlającym opis pracy sterowanego urządzenia. Instrukcje
podzielone są na trzy grupy:
o
Instrukcje standardowe
znajdują się w większości programów. Instrukcje standardowe
opisują: liczniki czasu, liczniki zdarzeń, połączenia logiczne, pętle programowe, inkrementacje,
negacje, przesunięcia oraz instrukcje blokowe.
o
Instrukcje specjalne
używane są do obsługi danych. Instrukcje specjalne zawierają rozkazy
przesunięcia, grupowania w tablicach, szukania, konwersji, iteracji oraz instrukcje czasu
rzeczywistego.
o
Instrukcje szybkie
umożliwiają obsługę zdarzeń w trybie przerwań, niezależnie od skanowania
PLC. Są to instrukcje obsługi szybkich liczników zdarzeń, przerwań obiektowych, aktualizacji
stanu wyjść i instrukcje transmisji.
Symbole.
Aby zrozumieć wykonywanie instrukcji PLC, konieczne jest poznanie specyficznego języka -
drabinkowego. Język logiki drabinkowej PLC składa się z powszechnie używanego zestawu symboli,
które reprezentują elementy kontroli oraz instrukcje.
Styki
Jednym z najtrudniejszych aspektów programowania PLC dla początkujących użytkowników
jest związek pomiędzy wynikiem operacji logicznej (bitem stanu), odwzorowującym rezultat działania
rozkazu, a funkcjami programowymi, które wykorzystują ten bit. Dwie z najczęściej używanych funkcji
programowych to styk normalnie otwarty (NO) oraz styk normalnie zamknięty (NC). Mówiąc
obrazowo, prąd przepływa przez styki, gdy są one zamknięte. Stykowi normalnie otwartemu (NO) jest
przyporządkowana wartość
prawda
(bit stanu = 1), gdy kontrolowane wejście lub wyjście jest w
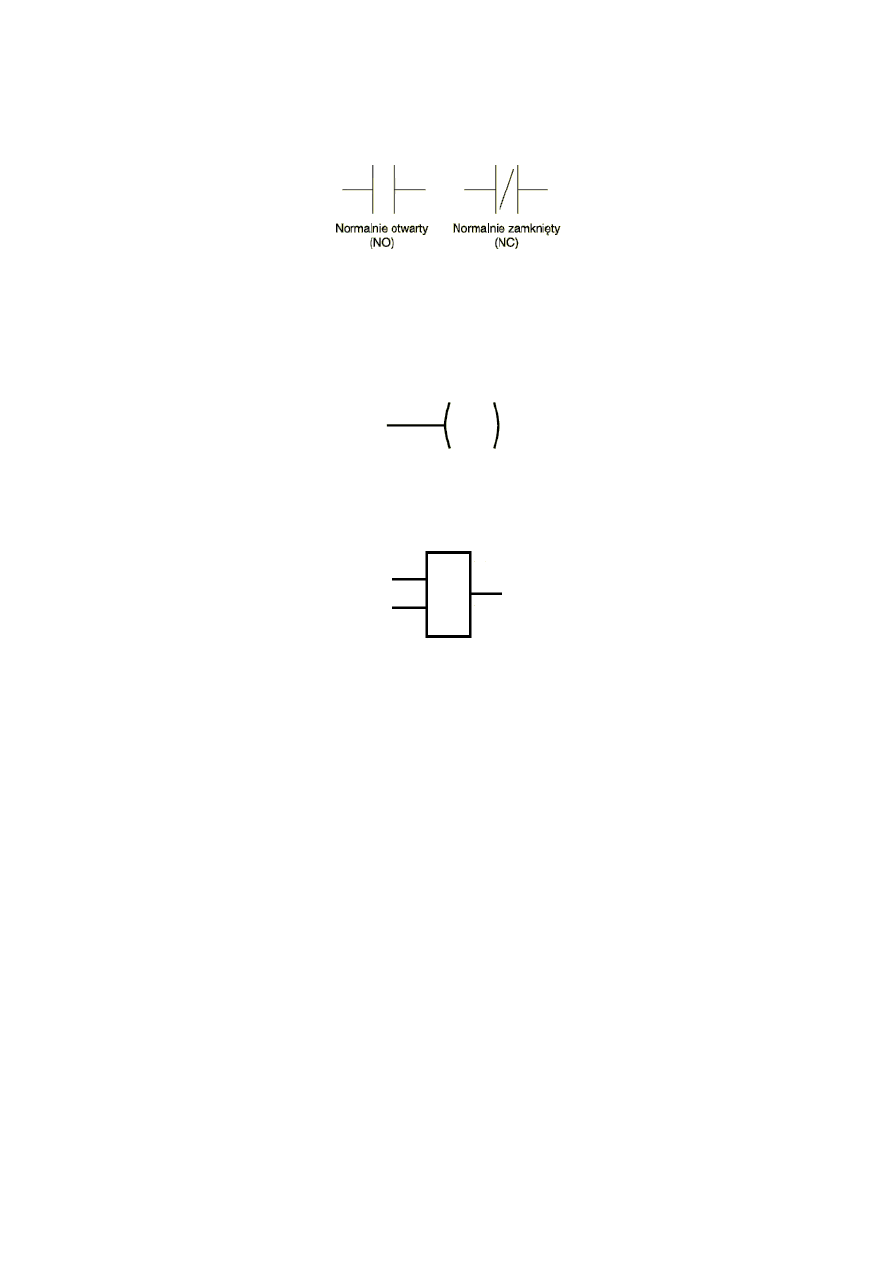
28
stanie 1. Stykowi normalnie zamkniętemu (NC) jest przyporządkowana wartość logiczna
prawda
(bit
stanu = 1), gdy stan kontrolowanego wejścia lub wyjścia równa się 0.
Cewki
Symbol cewki przekaźnika odwzorowuje na schemacie wyjście dwustanowe. Adres tego wyjścia
odpowiada oznaczeniu fizycznego zacisku. Warunkiem załączenia cewki (ustawienia wyjścia w stan 1)
jest stan 1 bitu odzwierciedlającego rezultat zadania logicznego realizowanego przez obwód sterujący
cewki. Stan tego bitu (jako stan wyjścia) może być także wykorzystany w innych obwodach
sterowniczych.
Bloki
- reprezentują różne instrukcje lub funkcje, które są wykonywane, gdy są spełnione warunki
logiczne ich realizacji (bit stanu = 1). Typowymi funkcjami oznaczanymi jako bloki są liczniki czasu,
liczniki zdarzeń i operacje matematyczne.
29
21. Roboty przemysłowe – definicja, generacje
Robot określenie mechanicznego urządzenia wykonującego automatycznie pewne zadania. Działanie
robota może być kontrolowane przez człowieka, przez wprowadzony wcześniej program, bądź przez
zbiór ogólnych reguł, które zostają przełożone na działanie robota przy pomocy technik sztucznej
inteligencji. Roboty często zastępują człowieka przy monotonnych, złożonych z powtarzających się
kroków czynnościach, które mogą wykonywać znacznie szybciej od ludzi. Domeną ich zastosowań są
też te zadania, które są niebezpieczne dla człowieka, na przykład związane z manipulacją szkodliwymi
dla zdrowia substancjami lub przebywaniem w nieprzyjaznym środowisku.
Robot Przemysłowy - urządzenie przeznaczone do automatycznej manipulacji z możliwością
wykonania kilku ruchów względem różnych osi, zaopatrzone w chwytaki lub w narzędzia przeznaczone
do zastosowania w przemyśle. Są to roboty wykorzystywane przy szeroko pojętych zadaniach
przemysłowych. Początkowo były tylko stosowane przy przenoszeniu materiałów i spawaniu. Obecnie
zastosowanie robotów w przemyśle stale wzrasta i przedstawiony poniżej podział może nie
obejmować wszystkich dziedzin ich zastosowania.
o Jednym z kryteriów klasyfikacji jest przeznaczenie robotów, tak więc można wyróżnić następujące
klasy robotów:
Do badań naukowych
Do celów szkoleniowych
Do celów przemysłowych
Do celów badawczych pod wodą, w przestrzeni kosmicznej.
o Innym kryterium klasyfikacji robotów jest rodzaj zastosowanych napędów:
Z napędem pneumatycznym
Z napędem hydraulicznym
Z napędem elektrycznym
Z napędem mieszanym
Generacje:
o
Roboty I generacji
to roboty zaprogramowane najczęściej na określoną sekwencję czynności
(istnieje możliwość ich przeprogramowania). W robotach tej generacji stosowano przeważnie
otwarty układ sterowania tak więc robot charakteryzuje się całkowitym brakiem sprzężenia
zwrotnego od stanu manipulowanego przedmiotu.
o
Roboty II generacji
to roboty wyposażone w zamknięty układ sterowania oraz czujniki
pozwalające dokonywać pomiarów podstawowych parametrów stanu robota i otoczenia.
Roboty II generacji powinny spełniają warunek takiej taktyki przy kontakcie ze światem
zewnętrznym, aby uzyskać optymalny efekt działania. Robot powinien rozpoznawać żądany
30
obiekt nawet wówczas, gdy przemieszcza się z innymi obiektami, następnie rozpoznać ten
obiekt bez względu na jego położenie i kształt geometryczny. Takie roboty realizują te
wymagania za pomocą zespołu czujników.
o Roboty III generacji to roboty wyposażone w zamknięty układ sterowania oraz czujniki
pozwalające dokonywać złożonych pomiarów parametrów stanu robota i otoczenia. Tak
więc roboty te są wyposażone w zdolności rozpoznawania złożonych kształtów i klasyfikacji
złożonych sytuacji, a ich system sterowania powinien posiadać zdolności adaptacyjne.
Schemat układu sterowania dla robotów III generacji jest taki sam jak dla robotów II
generacji
22. Schematy kinematyczne robotów, stopnie swobody
Manipulatorem nazywamy układ N ramion połączonych ze sobą przegubami, zakończony efektorem
(chwytakiem). Pojedyncze ogniwo manipulatora zbudowane jest z przegubu oraz następującego po
nim ramienia, gdzie przegub zapewnia możliwość ruchu. Każdy przegub opisywany jest za pomocą
współrzędnej wewnętrznej (nastawy)q i przy czym i = 1, 2, ..., N.
Proste zadanie kinematyki polega na obliczeniu pozycji i orientacji członu roboczego względem
układu odniesienia podstawy dla danego zbioru współrzędnych konfiguracyjnych. Zadanie to można
traktować jako odwzorowanie opisu położenia manipulatora w przestrzeni współrzędnych
konfiguracyjnych na opis przestrzeni współrzędnych kartezjańskich. Słowo kinematyka w robotyce
odpowiada pojęciu kinematyka we współrzędnych i opisuje najczęściej zależność pomiędzy strukturą
manipulatora robotycznego, nastawami poszczególnych ramion (współrzędne wewnętrzne zapisywane
jako wektor q), a położeniem efektora. Zależność ta przedstawiana jest pod postacią macierzy K(q)
(Notacja Denavita-Hartenberga) lub pod postacią wektora k(q) (będącego "pochodną" ww. macierzy).
W tym drugim przypadku składowe orientacji uzyskane zostają poprzez zastosowanie odpowiedniej
parametryzacji macierzy R(q) będącej podmacierzą macierzy K(q). Najczęściej wektor k(q)
przedstawia się jako
gdzie trzy pierwsze składowe określają położenie, a kolejne trzy
orientację. Na podstawie wektora k(q) wyznaczyć można macierz Jakobiego stosowaną w algorytmie
Jakobianowym, a następnie określić konfiguracje osobliwe oraz manipulowalność.
31
Stopnie swobody
Liczbę niezależnych zmiennych opisujących jednoznacznie stan (modelu) układu fizycznego
nazywa się liczbą stopni swobody tego układu. W mechanice klasycznej jest to liczba niezależnych
ruchów, jakie ciało jest w stanie zrealizować w przestrzeni. Przez niezależnych rozumie się, że żaden z
tych ruchów nie może być uzyskany poprzez superpozycję pozostałych. Ciało sztywne całkowicie
swobodne (to jest takie, na które nie nałożono żadnych więzów) ma maksymalną liczbę sześciu stopni
swobody:
o Trzy ruchy translacyjne w stosunku do osi układu współrzędnych X, Y i Z (ruch
postępowy).
o Trzy obroty względem osi równoległych do osi układu współrzędnych X, Y i Z (ruch
obrotowy).
Ciała odkształcalne mogą posiadać większą liczbę stopni swobody. Istotny jest tu podział na
ciała o skończonej liczbie stopni swobody (tzw. modele dyskretne), oraz na ciała o nieskończonej
liczbie stopni swobody (tzw. modele ciągłe).
Zgodnie z zasadami mechaniki, każdą trajektorię ciała materialnego można rozłożyć na sumę prostych
ruchów opisanych powyżej.
Ciało materialne (np. człon mechanizmu) łączone z drugim w parę kinematyczną traci pewną
ilość stopni swobody, w zależności od klasy pary kinematycznej. Ogólnie, jeżeli układ składa się z
dwóch ciał (podukładów) o odpowiednio: „n1” i „n2” stopniach swobody, oraz między tymi ciałami
występuje „w” więzów, to układ taki posiada „n1+n2-w” stopni swobody.
23. Pozycja i orientacja robotów, współrzędne
Pozycja Robota Jest określana przez położenie punktu, w którym znajduje się końcówka robota w
każdej pozycji robot ma jeszcze różne orientacje. Do zmiany orientacji potrzebne są dodatkowo 3
stopnie swobody. Tylko robot z minimum 6 stopniami swobody może przyjąć dowolną pozycję i
dowolną orientację.
Współrzędne wewnętrzne: Każdy przegub opisywany jest za pomocą współrzędnej wewnętrznej
(nastawy)
q
i
przy czym i = 1, 2, ..., N. Zmienne
q
i
po złożeniu tworzą wektor
, zwany wektorem współrzędnych wewnętrznych. Jeśli manipulator potraktujemy jako układ
sterowania, to
q
będzie odpowiadać wektorowi stanu.
Współrzędne zewnętrzne: Podczas pracy z manipulatorem ważne jest położenie i orientacja jego
efektora określane we współrzędnych zewnętrznych. Mogą one być zapisane pod postacią szóstki liczb
. W zależności od potrzeb rozmiar ten może ulec zmianie (przykładowo w danym
przypadku ważne mogą być jedynie współrzędne x oraz y). Pierwsza trójka liczb określa położenie
efektora, a kolejna - orientację.
32
Kinematyka manipulatora Ostatecznie położenie i orientacja efektora mogą być opisane we
współrzędnych zewnętrznych za pomocą wektora
oraz w funkcji współrzędnych
wewnętrznych
. Przekształcenie k :
nazywamy kinematyką
manipulatora we współrzędnych. W celu łatwiejszego opisu własności manipulatora z każdym jego
przegubem oraz efektorem możemy powiązać kartezjański układ współrzędnych, który nazywany jest
układem lokalnym. Układ
X
0
Y
0
Z
0
związany z podstawą nazywać będziemy układem bazowym i
względem niego będziemy wyznaczać położenie oraz orientację przegubów oraz efektora
manipulatora. Do opisu manipulatorów najczęściej stosuje się Notację Denavita-Hartenberga
.
24. Zadanie proste i odwrotne kinematyki robota
Zadanie proste sterowania:
Dla danej konfiguracji współrzędnych wewnętrznych należy wyliczyć pozycję i orientację
przedmiotu trzymanego przez chwytak we współrzędnych wewnętrznych (rozwiązanie jednoznaczne).
Należy podkreślić, iż bardzo często istnieje wiele sposobów orientowania układów
współrzędnych (zgodnie z notacją Denavita-Hartenberga), jednak celem analizy kinematyki prostej
jest przyjęcie najprostszej formy opisu ze względu na zmniejszenie komplikacji związanych z
obliczeniami.
Zadanie odwrotne sterowania:
Dla danej pozycji i orientacji przedmiotu należy wyznaczyć współrzędne wewnętrzne
(rozwiązanie niejednoznaczne). Kinematyka odwrotna polega na znalezieniu zmiennych przegubowych
w zależności od pozycji i orientacji końcówki roboczej.
W ogólnym przypadku jest ono trudniejsze niż zadanie kinematyki prostej, ponieważ czasami
nie istnieje jednoznaczne rozwiązanie wynikające z nieliniowości równań kinematyki.
25. Zrobotyzowane stanowisko technologiczne
Składa się z robota z układem sensorycznym oraz urządzeń technologicznych
Stanowisko służy do samoczynnej produkcji (najczęściej do prac spawalniczych, montażowych,
wszędzie tam, gdzie istnieją trudne warunki dla człowieka). Praca na takim stanowisku jest
powtarzalna i ściśle zdefiniowana (taka sama dokładność wykonania).
W przypadku spawania, robot trzyma w chwytaku, lub ma na stałe umieszczone w kiści
urządzenie spawalnicze, którym powinien dokładnie jechać po szczelinie, umiejąc korygować
trajektorię wzdłuż niej. Stanowisko zrobotyzowane powinno posiadać taśmę lub stół obrotowy. Na
stole mogą znajdować się pozycjonery, które stanowią dodatkowy stopień swobody dla
wykonywanego przedmiotu. Układ sterujący steruje jednocześnie robotem i pozycjonerem.
Rozróżniamy pozycjonery obrotowe, przechylne, podwieszane – do przesuwania robota. Układy
sensoryczne służą do sprawdzania i kontrolowania wielu parametrów wykonywanych czynności (np.
kontrolowanie szwu spawalniczego).
Wyszukiwarka
Podobne podstrony:
Automatyka i robotyzacja id 733 Nieznany
automatyka wykl 1 id 73377 Nieznany
Odpowiedzi z robotyki id 33268 Nieznany
4 2 RG Automaty skonczone id 38 Nieznany (2)
automatyka sprawko 2 id 73363 Nieznany
automatyka c2 id 73267 Nieznany (2)
(1 ROZWOJ ROBOTYKI)id 766 Nieznany
Historia robotyki, id 204124 Nieznany
automaty 3d id 72987 Nieznany (2)
Automatyka napedow id 73330 Nieznany
Automatyka pytania id 73347 Nieznany
automaty tokarskie id 73020 Nieznany
automatyka sciaga id 73348 Nieznany
Automatyka transmitancja id 629 Nieznany (2)
automatyka kolokwium id 73327 Nieznany
automatyka wykl 1 id 73377 Nieznany
Pomiary Automatyka Robotyka 12 Nieznany
Podstawy Robotyki lab3 id 36832 Nieznany
więcej podobnych podstron