AKADEMIA GÓRNICZO - HUTNICZA
IM. STANISŁAWA STASZICA W KRAKOWIE
______________________________________________________
WYDZIAŁ ELEKTROTECHNIKI AUTOMATYKI INFORMATYKI I
ELEKTRONIKI
KATEDRA
INFORMATYKI
Praca dyplomowa
Temat pracy:
System do poglądowego przedstawienia właściwości
sieci neuronowych.
Autorzy: Piotr Swatowski
Tomasz Góźdź
Kierunek: Informatyka
Ocena: .................................
Promotor:
Prof. dr hab. inż. Ryszard Tadeusiewicz
Recenzent:
Kraków 1998/99


1CEL
.......................................................................................................................
6
2SZTUCZNE SIECI NEURONOWE
........................................................................
7
2.1R
YS
HISTORYCZNY
ROZWOJU
SIECI
NEURONOWYCH
....................................................................... 7
2.2D
EFINICJA
I
PODSTAWOWE
WŁAŚCIWOŚCI
SIECI
NEURONOWYCH
...................................................... 10
2.3O
PIS
DZIAŁANIA
NEURONU
.................................................................................................... 11
2.4U
CZENIE
SIECI
NEURONOWYCH
.............................................................................................. 12
2.4.1U
CZENIE
Z
NAUCZYCIELEM
................................................................................................. 13
2.4.2U
CZENIE
BEZ
NAUCZYCIELA
................................................................................................ 13
2.5O
RGANIZACJA
UCZENIA
SIECI
................................................................................................ 14
2.6P
ROJEKTOWANIE
ZBIORU
UCZĄCEGO
DLA
SIECI
NEURONOWEJ
........................................................ 15
2.6.1R
OZMIAR
ZBIORU
............................................................................................................ 15
2.6.2B
ŁĘDY
PRZYPADKOWE
..................................................................................................... 16
2.6.3Z
ALEŻNOŚĆ
ROZMIARU
SIECI
I
ROZMIARU
ZBIORU
UCZĄCEGO
........................................................ 16
2.6.4R
OZWARSTWIENIE
ZBIORU
UCZĄCEGO
................................................................................... 16
2.6.5U
KRYTE
BŁĘDY
SYSTEMATYCZNE
......................................................................................... 17
2.7R
EGUŁY
UCZENIA
.............................................................................................................. 17
2.7.1R
EGUŁA
D
ELTA
.............................................................................................................. 17
2.7.2R
EGUŁA
H
EBBA
............................................................................................................. 19
3OPIS IMPLEMENTACJI POGLĄDOWEJ PREZENTACJI WYBRANYCH
PRZYKŁADÓW SIECI NEURONOWYCH
............................................................
22
3.1P
REZENTACJA
NEURONU
...................................................................................................... 22
3.2P
ROSTA
SIEĆ
NEURONOWA
(
Z
WAT)..................................................................................... 26
3.3U
CZENIE
POJEDYNCZEGO
NEURONU
........................................................................................ 29
3.4U
CZENIE
PROSTEJ
SIECI
...................................................................................................... 32
3.5S
IEĆ
NEURONOWA
JAKO
FILTR
SYGNAŁU
Z
ZAKŁÓCENIAMI
............................................................. 34
3.6R
OZPOZNAWANIE
OBRAZU
.................................................................................................... 37
3.7B
ACKPROPAGATION
-
NAJPOPULARNIEJSZA
METODA
UCZENIA
LINIOWYCH
SIECI
NEURONOWYCH
............... 41
3.8S
IEĆ
K
OHONENA
............................................................................................................... 48
3.9S
AMOUCZENIE
SIECI
NEURONOWEJ
......................................................................................... 52
3.10 S
IEĆ
H
OPFIELDA
............................................................................................................ 58
4OPIS ŚRODOWISKA DELPHI JAKO PRZYKŁAD NARZĘDZIA TYPU RAD
....
64
4.1C
HARAKTERYSTYKA
ŚRODOWISKA
.......................................................................................... 64
4.1.1J
ĘZYK
PROGRAMOWANIA
: P
ASCAL
(
ZARYS
)............................................................................ 65
4.1.2Ś
RODOWISKO
RAD: D
ELPHI
............................................................................................ 66
4.1.3K
OMPONENTY
–
NOWA
JAKOŚĆ
W
PROGRAMOWANIU
................................................................ 68
4.1.4M
OCNE
I
SŁABE
STRONY
D
ELPHI
......................................................................................... 68
5PREZENTACJA PROGRAMU KOMPUTEROWEGO
........................................
70
5.1O
PIS
KONSTRUKCJI
PROGRAMU
............................................................................................. 70
5.2P
OSZCZEGÓLNE
MODUŁY
PROGRAMU
KOMPUTEROWEGO
............................................................... 70
5.2.1M
ODUŁ
PIERWSZY
- P
REZENTACJA
NEURONU
......................................................................... 70
5.2.2M
ODUŁ
DRUGI
- P
ROSTA
SIEĆ
NEURONOWA
(
Z
WAT)............................................................. 73
5.2.3M
ODUŁ
TRZECI
- U
CZENIE
POJEDYNCZEGO
NEURONU
............................................................... 76
5.2.4M
ODUŁ
CZWARTY
- U
CZENIE
PROSTEJ
SIECI
.......................................................................... 79
5.2.5M
ODUŁ
PIĄTY
- S
IEĆ
NEURONOWA
JAKO
FILTR
SYGNAŁU
Z
ZAKŁÓCENIAMI
....................................... 82
5.2.6M
ODUŁ
SZÓSTY
- R
OZPOZNAWANIE
OBRAZU
.......................................................................... 88
5.2.7M
ODUŁ
SIÓDMY
- B
ACKPROPAGATION
-
NAJPOPULARNIEJSZA
METODA
UCZENIA
LINIOWYCH
SIECI
NEURONOWYCH
...................................................................................................................... 93
5.2.8M
ODUŁ
ÓSMY
- S
IEĆ
K
OHONENA
...................................................................................... 102
5.2.9M
ODUŁ
DZIEWIĄTY
- S
AMOUCZENIE
SIECI
NEURONOWEJ
.......................................................... 106
5.2.10M
ODUŁ
DZIESIĄTY
- S
IEĆ
H
OPFIELDA
............................................................................... 110
6PODSUMOWANIE
............................................................................................
117
6.1W
NIOSKI
....................................................................................................................... 117
6.2P
ROPOZYCJE
DALSZEJ
EWOLUCJI
PROGRAMU
.......................................................................... 117
7LITERATURA
....................................................................................................
119


1 Cel
Celem naszej pracy jest stworzenie środowiska (dydaktyczno -
symulacyjnego programu komputerowego) umożliwiającego użytkownikowi
zapoznanie się z możliwościami zastosowań oraz ze sposobem działania sieci
neuronowych. Program ten w założeniu jest narzędziem edukacyjnym i służyć ma
do wizualizacji wybranych właściwości sieci neuronowych oraz przykładów
istotnych aspektów uczenia, testowania i wykorzystania sieci.
Do aplikacji dołączamy również system pomocy dla użytkownika (Help),
zawierający wstęp teoretyczny i szczegółowe omówienie prezentowanych przez
nas zagadnień.

2 Sztuczne sieci neuronowe
W rozdziale tym zawrzemy informacje o sieciach neuronowych, ich
częściach składowych – neuronach, konstrukcji, typach, sposobach uczenia oraz
testowania.
Naszkicujemy również historyczny aspekt ewolucji zainteresowania, budowy
teorii jak i jej praktycznego wykorzystania w materii sztucznych sieci neuronowych.
2.1 Rys historyczny rozwoju sieci neuronowych
W początkowym okresie, gdy nie było formalnych podstawa nauki
sztucznych sieci neuronowych zainteresowanie badaczy osadzonych mocno w
dziedzinie neurofizjologii czy bioniki skierowane były na opisie mechanizmów
działania mózgu czy pojedynczych komórek układu nerwowego. Dziedzina sieci
neuronowych zaistniała samodzielnie wraz z wydaniem historycznej pracy [5], w
której po raz pierwszy pokuszono się o matematyczny opis komórki neuronowej.
W tejże pracy istotnym elementem było również określenie zasad przetwarzania
informacji opartego na kanwie modelu sztucznego neuronu.
Kolejnym kanonem wyznaczającym na długi czas rozwój wiedzy o sieciach
neuronowych stanowią dwie pozycje: książka [6] prezentująca tę problematykę od
strony rozwiązań technicznych oraz książka [7] stanowiąca podstawowe źródło
wiadomości biologicznych, które to od zarania dziedziny sztucznych sieci
neuronowych są niedoścignionym wzorem i źródłem inspiracji dla kolejnych
pokoleń badaczy.
Pierwszym szeroko znanym przykładem znanej sieci neuronowej był
Perceptron [8]. Sieci ta jako układ częściowo elektromechaniczny a częściowo
elektroniczny została zbudowana w 1957 w Cornell Aeronautical Laboratory. Sieć
ta miała za zadanie rozpoznawać znaki. Programowanie tego rozwiązania oparto
na zasadach prostego uczenia co stanowiło o wielkim kroku na przód w dziedzinie
sieci neuronowych. Po ogłoszeniu wyników przez twórców nastąpił gwałtowny
rozwój tego typu sieci neuronowych na całym świecie. Oczywiście większość

naśladowców nie wyszło ponad odtworzenie pierwotnego rozwiązania, ale znaleźli
się i tacy którzy twórczo przekształcili pomysły Rosenblatta i Wightmana.
Bardzo istotnym tu przykładem jest rozwiązania zaproponowane przez
Bernarda Widrowa z Uniwersytetu Standforda sieć Madaline zbudowana w 1960
roku. Sieć ta składała się z pojedynczych elementów Adaline (ang. Adaptive linear
element), który powielony oraz połączony dało układ Madaline (ang. Many
Adaline). [9, 10]
W owych pionierskich czasach próbowano nawet tworzyć model całego
mózgu. Obecnie gdy o mózgu wiemy już znacznie więcej nikt nie porywa się na
takiego rodzaju zaangażowania.
Tempo rozwoju badań nad problematyką sztucznych sieci neuronowych
zostało gwałtownie zahamowane na początku lat 70-tych po publikacji książki [11],
która to zawierała formalny dowód, że sieci jednowarstwowe (podobne do
perceptronu) mają bardzo ograniczony zakres zastosowań. Taki stan - impasu
utrzymywał się przez około 15 lat aż do ukazania się serii publikacji, które w
sposób bardzo sugestywny pokazywały, że sieci nieliniowe wolne są od
ograniczeń pokazanych w pracy [11]. Jednocześnie mniej więcej w tym czasie
ogłoszono kilka bardzo efektywnych, formalnych przepisów na uczenie sieci
wielowarstwowych.
Okres lat 70-tych nie jest jednak zupełnie bezpłodny jeśli chodzi o tworzone
nowe konstrukcje sieci neuronowych. Wymienić tu należy, chociażby zbudowaną
przez Stephena Grossberga na uniwersytecie w Bostonie sieć Avalanche. Służyła
ona do rozpoznawania mowy oraz sterowaniem ramieniem robota. Z kolei w MIT
powstaje Cerebellatron skonstruowany przez badaczy Davida Mara, Jamesa
Albusa i Andresa Pollioneze, służący także do sterowania robota. Odmienne
zastosowanie miała sieć Brain State in the Box, zbudowana przez Jamesa
Andersona z uniwersytetu Browna w 1977 roku. Funkcjonalnie była
odpowiednikiem pamięci asocjacyjnej z dwustronnym dostępem (BAM), ale jej
działanie nie było związane z iteracyjnym procesem poszukiwania, lecz polegało
na szybkich zależnościach typu wejście – wyjście.

W momencie opracowania technologii wytwarzania sztucznych modeli
komórek nerwowych w postaci układów scalonych pojawiły się w latach 80-tych
pierwsze konstrukcje o dużych rozmiarach oraz znaczących mocach
obliczeniowych.
W tym czasie pojawiają się pierwsze sieci ze sprzężeniami zwrotnymi.
Istotnym przykładem takiej konstrukcji jest opracowana przez Johna Hopfielda z
AT&T Bell Labs sieć wykorzystywana do odtwarzania obrazów z ich fragmentów,
a także stosowana do rozwiązywania zadań optymalizacyjnych – słynny problem
komiwojażera.
Renesans szerokiego zainteresowania tematyką sieci neuronowych datuję
się na drugą połowę lat 80-tych. Wtedy to swoją przełomową książkę publikuje
J.A. Anderson [12], , a J.J.Hopfield wprowadza rekurencyjną architekturę pamięci
neuronowych i opisuje w swoich pracach obliczeniowe własności sieci ze
sprzężeniem zwrotnym. Ożywienie wniosło także opublikowanie monografii
opracowanej przez McClellanda i Rumelharta [19] na temat równoległego
przetwarzania rozproszonego – publikacja ta spowodowała wzrost
zainteresowania możliwościami sieci warstwowych.
Począwszy od lat 1986-87 datuje się wzrost liczby projektów badawczych w
dziedzinie sieci neuronowych. Wzrasta również liczba zagadnień, które można
rozwiązać przy użyciu sieci neuronowych – dokładna analiza różnego rodzaju
zagadnień wskazuje często, że zachowanie się danego złożonego systemu jest
zdeterminowane przez lokalne i jednoczesne oddziaływanie wielkiej liczby
prostych składowych elementów takiego systemu – co wskazuje, że dla takiego
zagadnienia można zastosować sieć neuronową. Wzrost liczby takich właśnie
zagadnień i dziedzin powoduje rozszerzanie się zakresu zastosowań sieci
neuronowych.

2.2 Definicja i podstawowe właściwości sieci neuronowych
Jako obiekt badań sieci neuronowe stanowią bardzo uproszczony (przez co
łatwiejszy do ogarnięcia myślą lub do zamodelowania na komputerze), ale bogaty
i ciekawy model rzeczywistego biologicznego systemu nerwowego.
Składają się one z połączonych ze sobą obiektów (umownie zwanych
neuronami). Istotną cechą sieci takich elementów jest możliwość uczenia się - to
jest modyfikowania parametrów charakteryzujących poszczególne neurony w taki
sposób, by zwiększyć efektywność sieci przy rozwiązywaniu zadań określonego
typu.
Sieci neuronowe mogą być bardzo skuteczne jako narzędzia obliczeniowe -
i to w rozwiązywaniu takich zadań, z którymi typowe komputery i typowe
programy sobie nie radzą. Jest tak z tego powodu, że sieci neuronowe mają w
stosunku do typowych systemów obliczeniowych dwie zasadnicze zalety. Po
pierwsze obliczenia są w sieciach neuronowych wykonywane równolegle, w
związku z czym szybkość pracy sieci neuronowych może znacznie przewyższać
szybkość obliczeń sekwencyjnych. Drugą zaletą sieci jest możliwość uzyskania
rozwiązania problemu z pominięciem etapu konstruowania algorytmu rozwiązania
problemu.
Sieci nie trzeba programować. Istnieją metody uczenia i samouczenia sieci
pozwalają uzyskać ich celowe i skuteczne działanie nawet w sytuacji, kiedy twórca
sieci nie zna algorytmu, według którego można rozwiązać postawione zadanie.
Zarówno program działania oraz informacje stanowiące bazę wiedzy, a
także dane na których wykonuje się obliczenia, jak i sam proces obliczania - są w
sieci całkowicie rozproszone.
Sieć działa zawsze jako całość i wszystkie jej elementy mają swój wkład w
realizację wszystkich czynności, które sieć realizuje. Jedną z konsekwencji takiego
działania sieci jest jej zdolność do poprawnego działania nawet po uszkodzeniu
znacznej części wchodzących w jej skład elementów.
Struktura sieci powstaje w ten sposób, że wyjścia jednych neuronów łączy
się z wejściami innych. Oczywiście konkretna topologia sieci powinna wynikać z
0

rodzaju zadania, jakie jest stawiane przed siecią. Jednak decyzje dotyczące
struktury sieci nie wpływają na jej zachowanie w stopniu decydującym.
Zachowanie sieci w zasadniczy sposób determinowane jest przez proces jej
uczenia, a nie przez strukturę czy liczbę użytych do jej budowy neuronów.
Znane są doświadczenia, w których strukturę sieci wybierano w sposób
całkowicie przypadkowy (ustalając na drodze losowania, które elementy należy ze
sobą połączyć i w jaki sposób), a sieć mimo to zdolna była do rozwiązywania
stawianych jej zadań.
Sieci neuronowe mogą całą swoją wiedzę zyskiwać wyłącznie w trakcie
nauki i nie muszą mieć z góry zadanej, dopasowanej do stawianych im zadań,
jakiejkolwiek precyzyjnie określonej struktury. Sieć musi jednak mieć
wystarczający stopień złożoności, żeby w jej strukturze można było w toku uczenia
"wykrystalizować" potrzebne połączenia i struktury. Zbyt mała sieć nie jest w
stanie nauczyć się niczego, gdyż jej "potencjał intelektualny" na to nie pozwala -
rzecz jednak nie w strukturze, a w liczbie elementów.
2.3 Opis działania neuronu
Sztuczne neurony charakteryzują się występowaniem wielu wejść i jednego
wyjścia. Sygnały wejściowe xi (i = 1, 2, . . . , n) oraz sygnał wyjściowy y mogą
przyjmować wartości, odpowiadające pewnym informacjom. W ten sposób
zadanie sieci sprowadzone do funkcjonowania jej podstawowego elementu polega
na tym, że neuron przetwarza informacje wejściowe xi na pewien wynik y.
Neurony traktować można jako elementarne procesory o następujących
właściwościach:
każdy neuron otrzymuje wiele sygnałów wejściowych i wyznacza na ich
podstawie swoją odpowiedź to znaczy jeden sygnał wyjściowy;
z każdym oddzielnym wejściem neuronu związany jest parametr nazywany
wagą ( określa stopień ważności informacji docierających tym właśnie
wejściem - na wyjście ma wpływ waga przemnożona przez wejście);
1

sygnał wchodzący określonym wejściem jest najpierw przemnażany przez
wagę danego wejścia, w związku z czym w dalszych obliczeniach uczestniczy
już w formie zmodyfikowanej: wzmocnionej (gdy waga jest większa od 1) lub
stłumionej (gdy waga ma wartość mniejszą od 1) względnie nawet
przeciwstawnej w stosunku do sygnałów z innych wejść gdy waga ma wartość
ujemną (tzw. wejścia hamujące);
sygnały wejściowe (przemnożone przez odpowiednie wagi) są w neuronie
sumowane, dając pewien pomocniczy sygnał wewnętrzny nazywany czasem
łącznym pobudzeniem neuronu (w literaturze angielskiej net value);
do tak utworzonej sumy sygnałów dodaje niekiedy (nie we wszystkich typach
sieci) pewien dodatkowy składnik niezależny od sygnałów wejściowych,
nazywany progiem (w literaturze angielskiej bias);
suma przemnożonych przez wagi sygnałów wewnętrznych z dodanym
(ewentualnie) progiem może być bezpośrednio traktowana jako sygnał
wyjściowy neuronu ( w sieciach o bogatszych możliwościach sygnał wyjściowy
neuronu obliczany jest za pomocą pewnej nieliniowej zależności między
łącznym pobudzeniem a sygnałem wyjściowym);
Każdy neuron dysponuje pewną wewnętrzną pamięcią (reprezentowaną
przez aktualne wartości wag i progu) oraz pewnymi możliwościami przetwarzania
wejściowych sygnałów w sygnał wyjściowy.
Z powodu bardzo ubogich możliwości obliczeniowych pojedynczego
neuronu - sieć neuronowa może działać wyłącznie jako całość. Wszystkie
możliwości i właściwości sieci neuronowych są wynikiem kolektywnego działania
bardzo wielu połączonych ze sobą elementów (całej sieci, a nie pojedynczych
neuronów).
2.4 Uczenie sieci neuronowych
Cykl działania sieci neuronowej podzielić można na etap nauki, kiedy sieć
gromadzi informacje potrzebne jej do określenia, co i jak ma robić, oraz na etap
2

normalnego działania (nazywany czasem także egzaminem), kiedy w oparciu o
zdobytą wiedzę sieć musi rozwiązywać konkretne nowe zadania. Możliwe są dwa
warianty procesu uczenia : z nauczycielem i bez nauczyciela.
2.4.1 Uczenie z nauczycielem
Uczenie z nauczycielem polega na tym, że sieci podaje się przykłady
poprawnego działania, które powinna ona potem naśladować w swoim bieżącym
działaniu (w czasie egzaminu). Przykład należy rozumieć w ten sposób, że
nauczyciel podaje konkretne sygnały wejściowe i wyjściowe, pokazując, jaka jest
wymagana odpowiedź sieci dla pewnej konfiguracji danych wejściowych. Mamy do
czynienia z parą wartości - przykładowym sygnałem wejściowym i pożądanym
(oczekiwanym) wyjściem, czyli wymaganą odpowiedzią sieci na ten sygnał
wejściowy. Zbiór przykładów zgromadzonych w celu ich wykorzystaniu w procesie
uczenia sieci nazywa się zwykle ciągiem uczącym. Zatem w typowym procesie
uczenia sieć otrzymuje od nauczyciela ciąg uczący i na jego podstawie uczy się
prawidłowego działania, stosując jedną z wielu znanych dziś strategii uczenia.
2.4.2 Uczenie bez nauczyciela
Obok opisanego wyżej schematu uczenia z nauczycielem występuje też szereg
metod tak zwanego uczenia bez nauczyciela (albo samouczenia sieci). Metody te
polegają na podawaniu na wejście sieci wyłącznie szeregu przykładowych danych
wejściowych, bez podawania jakiejkolwiek informacji dotyczącej pożądanych czy
chociażby tylko oczekiwanych sygnałów wyjściowych. Odpowiednio
zaprojektowana sieć neuronowa potrafi wykorzystać same tylko obserwacje
wejściowych sygnałów i zbudować na ich podstawie sensowny algorytm swojego
działania - najczęściej polegający na tym, że automatycznie wykrywane są klasy
powtarzających się sygnałów wejściowych i sieć uczy się (spontanicznie, bez
jawnego nauczania) rozpoznawać te typowe wzorce sygnałów.
Samouczenie jest też bardzo interesujące z punktu widzenia zastosowań, gdyż
nie wymaga żadnej jawnie podawanej do sieci neuronowej zewnętrznej wiedzy , a
sieć zgromadzi wszystkie potrzebne informacje i wiadomości.
3

2.5 Organizacja uczenia sieci
Kluczowym pojęciem dla uczenia sieci są wagi wejść poszczególnych neuronów.
Każdy neuron ma wiele wejść, za pomocą których odbiera sygnały od innych
neuronów oraz sygnały wejściowe podawane do sieci jako dane do obliczeń. Z
wejściami tymi skojarzone są parametry nazywane wagami; każdy sygnał
wejściowy jest najpierw przemnażany przez wagę, a dopiero później sumowany z
innymi sygnałami. Jeśli zmienią się wartości wag - neuron zacznie pełnić innego
rodzaju funkcję w sieci, a co za tym idzie - cała sieć zacznie inaczej działać.
Uczenie sieci polega więc na tym, by tak dobrać wagi, żeby wszystkie neurony
wykonywały dokładnie takie czynności, jakich się od nich wymaga.
Ze względu na rozmiar sieci (w wielu wypadkach mamy do czynienia z b. dużą
liczbą neuronów) niemożliwe jest zdefiniowanie potrzebnych wag dla wszystkich
wejść w sposób jednorazowy i arbitralny ręcznie. Można jednak zaprojektować i
zrealizować proces uczenia polegający na rozpoczęciu działania sieci z pewnym
przypadkowym zestawem wag i na stopniowym polepszaniu tych wag. W każdym
kroku procesu uczenia wartości wag jednego lub kilku neuronów ulegają zmianie,
przy czym reguły tych zmian są tak pomyślane, by każdy neuron sam potrafił
określić, które ze swoich wag ma zmienić, w którą stronę (zwiększenie lub
zmniejszenie) a także o ile. Oczywiście przy określaniu potrzebnych zmian wag
neuron może korzystać z informacji pochodzących od nauczyciela (o ile stosujemy
uczenie z nauczycielem), nie zmienia to jednak faktu, że sam proces zmiany wag
(będących w sieci jedynym śladem pamięciowym) przebiega w każdym neuronie
sieci w sposób spontaniczny i niezależny dzięki czemu może być realizowany bez
konieczności bezpośredniego stałego dozoru ze strony osoby sterującej tym
procesem.
W praktycznych zastosowaniach korzysta się czasem z dodatkowego
mechanizmu "rywalizacji" między neuronami, który w niektórych zastosowaniach
pozwala uzyskiwać znacznie lepsze wyniki działania sieci. Zaobserwowanie
działania sieci z rywalizacją (competition network) możliwe jest po wprowadzeniu
do sieci elementu porównującego ze sobą sygnały wyjściowe wszystkich
neuronów i typującego wśród nich "zwycięzcę". Zwycięzcą w tej konkurencji
4

zostaje neuron o największej wartości sygnału wyjściowego. Z wytypowaniem
"zwycięzcy" mogą wiązać się różne konsekwencje (na przykład tylko temu
jednemu neuronowi można nadać prawo uczenia się (sieci Kohonena),
najczęściej jednak wytypowanie zwycięzcy służy do tego, by silniej spolaryzować
wyjściowe sygnały z sieci - na przykład tylko neuron będący "zwycięzcą" ma
prawo wysłać swój sygnał na zewnątrz, wszystkie pozostałe sygnały są natomiast
zerowane. Taka zasada działania sieci, nazywana czasem WTA (Winner Takes
All - zwycięzca zabiera wszystko) pozwala łatwiej interpretować zachowanie sieci
(szczególnie wtedy, gdy ma ona wiele wyjść), ale niesie ze sobą pewne
niebezpieczeństwa (wzmiankowane wyżej).
2.6 Projektowanie zbioru uczącego dla sieci neuronowej
2.6.1 Rozmiar zbioru
Jeśli sieć neuronowa ma działać efektywnie, zbiór uczący użyty musi
spełniać dwa podstawowe warunki:
po pierwsze każda klasa powinna być reprezentowana w zbiorze uczącym (na
ogół dane uczące składają się z kilku podgrup, z których każda określona jest
przez pewien wzorzec – wszystkie takie wzorce powinny być reprezentowane
w ciągu uczącym)
po drugie w ramach każdej klasy powinna być reprezentowana zmienność
statystyczna (praca sieci odbywać się będzie na ciągach zawierających dane
„zaszumione”, a nie idealnie czyste wzorce – projekt ciągu uczącego musi
zapewniać odpowiednią różnorodność efektów szumu).
Z drugiej strony ograniczeniem dla wielkości zbioru jest czasochłonność
procesu uczenia – wraz ze zbiorem uczącym wzrasta ona liniowo. Tak więc ze
wzglądu na szybkość procesu należy dążyć do minimalizacji rozmiaru zbioru
uczącego.
5

2.6.2 Błędy przypadkowe
Są to pojawiające się w trakcie pracy sieci niechciane „zdarzenia losowe” –
zakłócenia w ciągu wejściowym dla sieci. Gdy wszystkie próbki określonej
podklasy zakłócone są w ten sam sposób, to sieć nauczy się zakłóconego wzorca.
W sytuacji, gdy w rzeczywistej pracy sieci wzorzec pojawi się bez zakłócenia sieć
może go nie rozpoznać – bo nie nauczyła się go na podstawie ciągu uczącego.
Problem ten staje się szczególnie uciążliwy w sytuacji, gdy rozpatrywany
przypadek znajduje się w pobliżu granicy „obszaru decyzyjnego” danej podklasy.
W takiej sytuacji, aby uniknąć uczenia wzorców przypadkowych zwiększa
się liczność zbioru uczącego.
2.6.3 Zależność rozmiaru sieci i rozmiaru zbioru uczącego
Wielkość ciągu uczącego jest zależna od wielkości sieci, dla której jest on
projektowany. Im większa jest sieć – tym większy ciąg uczący jest konieczny do
nauczenia jej.
Skłonność do nadmiernego dopasowania sieci jest również proporcjonalna
do wielkości sieci. Przy założeniu, ze jest n wejść oraz m neuronów ukrytych –
sieć ma m x ( n + 1) wag . Przy n - rzędu kilkuset i m – kilkanaście (co jest
możliwe w zastosowaniach przemysłowych) otrzymujemy w sieci b. dużą ilość
parametrów swobodnych. Jedynym rozwiązaniem, które uchroni sieć przed
„nauczeniem się na pamięć” danego ciągu jest zbudowanie ciągu tak dużego, by
sieć nie mogła nauczyć się wszystkich szczegółów.
Można zalecić by minimalna liczba próbek była dwukrotnie większa od
liczby wag sieci (choć liczba czterokrotnie większa od ilości wag wydaje się
odpowiedniejsza). [2]
2.6.4 Rozwarstwienie zbioru uczącego
Jest to sytuacja, która wymusza zastosowanie bardzo dużego zbioru
uczącego. Obecność wielu podklas stwarza bowiem konieczność powiększania
tego zbioru, ponieważ częściej mogą pojawiać się błędy przypadkowe.
6

2.6.5 Ukryte błędy systematyczne
Jednym z istotnych niebezpieczeństw przy konstruowaniu zbiorów jest
nieświadome uczenie sieci ludzkich błędów systematycznych. Sieć uczy się takich
błędów tak samo jak innych wzorców. Jeśli ciąg uczący obciążony jest błędami
systematycznymi, może to doprowadzić do sytuacji, gdy nauczona sieć działająca
poprawnie na takim ciągu uczącym, zawiedzie przy pracy na danych
nieobciążonych błędem systematycznym.
2.7 Reguły uczenia
Zostaną omówione dwie podstawowe reguły uczenia: reguła Delta leżącą u
podstaw większości algorytmów uczenia z nauczycielem oraz reguła Hebba
stanowiąca przykład uczenia bez nauczyciela.
2.7.1 Reguła Delta
Reguła delta jest regułą uczenia z nauczycielem. Polega ona na tym, że
każdy neuron po otrzymaniu na swoich wejściach określone sygnały (z wejść sieci
albo od innych neuronów, stanowiących wcześniejsze piętra przetwarzania
informacji) wyznacza swój sygnał wyjściowy wykorzystując posiadaną wiedzę w
postaci wcześniej ustalonych wartości współczynników wzmocnienia (wag)
wszystkich wejść oraz (ewentualnie) progu. Sposoby wyznaczania przez neurony
wartości sygnałów wyjściowych na podstawie sygnałów wejściowych omówione
zostały dokładniej w poprzednim rozdziale. Wartość sygnału wyjściowego,
wyznaczonego przez neuron na danym kroku procesu uczenia porównywana jest
z odpowiedzią wzorcową podaną przez nauczyciela w ciągu uczącym. Jeśli
występuje rozbieżność - neuron wyznacza różnicę pomiędzy swoim sygnałem
wyjściowym a tą wartością sygnału, która była by - według nauczyciela
prawidłowa. Ta różnica oznaczana jest zwykle symbolem greckiej litery
(delta) i
stąd nazwa opisywanej metody.
7

Sygnał błędu (delta) wykorzystywany jest przez neuron do korygowania
swoich współczynników wagowych (i ewentualnie progu), stosując następujące
reguły:
wagi zmieniane są tym silniej, im większy błąd został wykryty;
wagi związane z tymi wejściami, na których występowały duże wartości
sygnałów wejściowych, zmieniane są bardziej, niż wagi wejść, na których
sygnał wejściowy był niewielki.
Znając błąd popełniony przez neuron oraz jego sygnały wejściowe możemy
łatwo przewidzieć, jak będą się zmieniać jego wagi.
Sieć stosując opisane metody w praktyce sama przerywa proces uczenia
gdy jest już dobrze wytrenowana, gdyż małe błędy powodują jedynie minimalne
korekty wag. Jest to logiczne, podobnie jak zasada uzależniania wielkości korekty
od wielkości wejściowego sygnału przekazywanego przez rozważaną wagę, te
wejścia, na których występowały większe sygnały miały większy wpływ na wynik
działania neuronu, który okazał się błędny, trzeba je więc silniej "temperować". W
szczególności opisany algorytm powoduje, że dla wejść, na których w danym
momencie nie były podawane sygnały (podczas obliczeń miały one zerowe
wartości) odpowiednie wagi nie są zmieniane, nie wiadomo bowiem, czy są dobre
czy nie, gdyż nie uczestniczyły w tworzeniu aktualnego (błędnego, skoro trzeba
coś poprawiać) sygnału wyjściowego.
W praktycznych realizacjach opisanego wyżej algorytmu dochodzi kilka
dalszych godnych uwagi elementów. W pierwszej kolejności twórca sieci musi
zdecydować, jak silne powinny być zmiany wag powodowane przez określone
wartości sygnałów wejściowych i określoną wielkość błędu. Ten współczynnik
proporcjonalności
, zwany learning rate, może być wybierany dowolnie, jednak
każda konkretna decyzja ma określone konsekwencje. Wybranie współczynnika
za małego prowadzi do bardzo powolnego procesu uczenia (wagi są poprawiane
w każdym kroku bardzo słabo, żeby więc osiągnęły pożądane wartości trzeba
wykonać bardzo dużo takich kroków). Z kolei wybór za dużego współczynnika
uczenia powoduje bardzo gwałtowne zmiany parametrów sieci, które w
krańcowym przypadku prowadzić mogą nawet do niestabilności procesu uczenia.
8

Konieczny jest więc kompromisowy wybór współczynnika uczenia, uwzględniający
zarówno korzyści związane z szybką pracą, jak i względy bezpieczeństwa,
wskazujące na konieczność uzyskania stabilnej pracy procesu uczenia.
2.7.2 Reguła Hebba
Jest to jedna z najpopularniejszych metod samouczenia sieci neuronowych.
Polega ona na tym, że sieci pokazuje się kolejne przykłady sygnałów
wejściowych, nie podając żadnych informacji o tym, co z tymi sygnałami należy
zrobić. Sieć obserwuje otoczenie i odbiera różne sygnały, nikt nie określa jednak,
jakie znaczenie mają pokazujące się obiekty i jakie są pomiędzy nimi zależności.
Sieć na podstawie obserwacji występujących sygnałów stopniowo sama odkrywa,
jakie jest ich znaczenie i również sama ustala zachodzące między sygnałami
zależności.
Po podaniu do sieci neuronowej każdego kolejnego zestawu sygnałów
wejściowych tworzy się w tej sieci pewien rozkład sygnałów wyjściowych - niektóre
neurony sieci są pobudzone bardzo silnie, inne słabiej, a jeszcze inne mają
sygnały wyjściowe wręcz ujemne. Interpretacja tych zachowań może być taka, że
niektóre neurony „rozpoznają” podawane sygnały jako „własne” (czyli takie, które
są skłonne akceptować), inne traktują je „obojętnie”, zaś jeszcze u innych
neuronów wzbudzają one wręcz „awersję”. Po ustaleniu się sygnałów wyjściowych
wszystkich neuronów w całej sieci - wszystkie wagi wszystkich neuronów są
zmieniane, przy czym wielkość odpowiedniej zmiany wyznaczana jest na
podstawie iloczynu sygnału wejściowego, wchodzącego na dane wejście (to
którego wagę zmieniamy) i sygnału wyjściowego produkowanego przez neuron, w
którym modyfikujemy wagi. Łatwo zauważyć, że jest to właśnie realizacja
postulatu Hebba - w efekcie opisanego wyżej algorytmu połączenia między
źródłami silnych sygnałów i neuronami które na nie silnie reagują są wzmacniane.
Dokładniejsza analiza procesu samouczenia metodą Hebba pozwala
stwierdzić, że w wyniku konsekwentnego stosowania opisanego algorytmu
początkowe, najczęściej przypadkowe „preferencje” neuronów ulegają
systematycznemu wzmacnianiu i dokładnej polaryzacji. Jeśli jakiś neuron miał
„wrodzoną skłonność” do akceptowania sygnałów pewnego rodzaju - to w miarę
9

kolejnych pokazów nauczy się te sygnały rozpoznawać coraz dokładniej i coraz
bardziej precyzyjnie. Po dłuższym czasie takiego samouczenia w sieci powstaną
zatem wzorce poszczególnych typów występujących na wejściu sieci sygnałów. W
wyniku tego procesu sygnały podobne do siebie będą w miarę postępu uczenia
coraz skuteczniej grupowane i rozpoznawane przez pewne neurony, zaś inne typy
sygnałów staną się „obiektem zainteresowania” innych neuronów W wyniku tego
procesu samouczenia sieć nauczy się, ile klas podobnych do siebie sygnałów
pojawia się na jej wejściach oraz sama przyporządkuje tym klasom sygnałów
neurony, które nauczą się je rozróżniać, rozpoznawać i sygnalizować.
Proces samouczenia ma niestety wady. W porównaniu z procesem uczenia
z nauczycielem samouczenie jest zwykle znacznie powolniejsze. Co więcej bez
nauczyciela nie można z góry określić, który neuron wyspecjalizuje się w
rozpoznawania której klasy sygnałów. Stanowi to pewną trudność przy
wykorzystywaniu i interpretacji wyników pracy sieci. Co więcej - nie można
określić, czy sieć uczona w ten sposób nauczy się wszystkich prezentowanych jej
wzorców. Dlatego sieć przeznaczona do samouczenia musi być większa niż sieć
wykonująca to samo zadanie, ale trenowana w sposób klasyczny, z udziałem
nauczyciela. - Szacunkowo sieć powinna mieć co najmniej trzykrotnie więcej
elementów warstwy wyjściowej niż wynosi oczekiwana liczba różnych wzorów,
które sieć ma rozpoznawać.
Bardzo istotną kwestią jest wybór początkowych wartości wag neuronów
sieci przeznaczonej do samouczenia. Wartości te mają bardzo silny wpływ na
ostateczne zachowanie sieci, ponieważ proces uczenia jedynie pogłębia i
doskonali pewne tendencje istniejące w sieci od samego początku, przeto od
jakości tych początkowych, „wrodzonych” właściwości sieci silnie zależy, do czego
sieć dojdzie na końcu procesu uczenia. Nie wiedząc z góry, jakiego zadania sieć
powinna się uczyć, trudno wprowadzać jakikolwiek zdeterminowany mechanizm
nadawania początkowych wartości wag, jednak pozostawienie wszystkiego
wyłącznie mechanizmom losowym może powodować, że sieć (zwłaszcza mała)
może nie zdołać wystarczająco zróżnicować swego działania w początkowym
okresie procesu uczenia i wszelkie późniejsze wysiłki, by znaleźć w strukturze
sieci reprezentację dla wszystkich występujących w wejściowych sygnałach klas,
0

mogą okazać się daremne. Można jednak wprowadzić pewien mechanizm
wstępnego „rozprowadzania” wartości wag w początkowej fazie procesu uczenia.
Metoda ta, zwana convex combiation modyfikuje początkowe wartości wag w taki
sposób, by zwiększyć prawdopodobieństwo równomiernego pokrycia przez
poszczególne neurony wszystkich typowych sytuacji pojawiających się w
wejściowym zbiorze danych. Jeśli tylko dane pojawiające się w początkowej fazie
uczenia nie będą różniły się istotnie od tych, jakie sieć będzie potem analizować i
różnicować - metoda convex combination stworzy w sposób automatyczny
dogodny punkt wyjścia do dalszego samouczenia i zapewni stosunkowo dobrą
jakość nauczonej sieci w większości praktycznych zadań.
1

3 Opis implementacji poglądowej prezentacji
wybranych przykładów sieci neuronowych
W rozdziale tym skoncentrujemy się na opisie zagadnień przedstawionych
w poszczególnych modułach systemu. Określimy sposób dojścia do otrzymanego
efektu - edukacyjnego programu komputerowego. Zaprezentujemy najistotniejsze
fragmenty kodu źródłowego, formalnie opisanego w języku Pascal, określającego
sposób implementacji wybranych cech rozpatrywanych sztucznych sieci
neuronowych. Układ tej części został zorganizowany w modułu dokładnie
odpowiadające częściom aplikacji tworzonej w Delphi.
3.1 Prezentacja neuronu
Sfera sztucznych sieci neuronowych opiera się na formalnych definicjach
modeli neuronu (następnie ich układów - sieci) oraz ich późniejszej implementacji
w postacie sprzętowej – np. układy VLSI lub oprogramowania – wszelkiego
rodzaju symulacje.
Pierwszą formalną definicję neuronu opartą na uproszczonym modelu
rzeczywistym podali McCulloch i Pitts (1943). [5]
Sygnały wejściowe x
i
, i=1,2,...,n maja wartości 1 lub 0 w zależności od tego
czy w danej chwili k impuls wejściowy pojawił się, czy też nie. Reguła aktywacji
neuronu ma dla tego modelu postać:
n
i
k
i
i
n
i
k
i
i
k
T
x
w
gdy
T
x
w
gdy
y
1
1
1
,
,
0
,
,
1
gdzie k=0,1,2,... oznacza kolejne momenty czasu, w
i
zaś jest
multiplikatywną wagą przypisaną połączeniu wejścia i z błoną neuronu.
Mimo swej prostoty, model ten wykazuje duże potencjalne możliwości . Przy
odpowiednim doborze wag i progów można z jego pomocą zrealizować funkcje
2
logiczne NOT, OR oraz AND bądź NOR lub NAND. Wprowadzając sprzężenie
zwrotne można jednak budować także układy sekwencyjne. W przypadku
sygnałów binarnych neuron z jednym wejściem pobudzającym i jednostkowym
progiem wytwarza sygnał y
k+1
= x
k
. Otrzymany prosty obwód zachowujący się jak
jednobitowy rejestr jest zdolny zapamiętać stan wejścia pomiędzy dwoma
momentami czasu. Zamykając pętlę sprzężenia zwrotnego powstaje komórka
pamięci.
Ze względu na to, że model McCullocha-Pittsa zawiera szereg istotnych
uproszczeń (obsługa jedynie stanów binarnych 0 i 1, założenie dyskretnego czasu
pracy, synchronizm działania wszystkich neuronów w sieci, wagi i progi są
niezmienne) wprowadza się ogólny opis sztucznego neuronu.
Ogólny model neuronu zakłada, że każdy neuron składa się z elementu
przetwarzającego połączonego z wejściami synaptycznymi oraz jednym wyjściem.
Przepływ sygnałów jest jednokierunkowy.
Sygnał wyjściowy neuronu dany jest zależnością:
n
i
i
i
T
x
w
f
f
y
1
)
(
x
w
gdzie w jest wektorem wag zdefiniowanym jako
T
n
def
w
w
w
2
1
,
w
x jest wektorem wejściowym:
T
n
def
x
x
x
2
1
,
x
Funkcja
)
(
x
w
T
f
określana jest zwykle nazwą funkcji aktywacji. Jej
dziedziną jest zbiór łącznych pobudzeń neuronu. W literaturze często łączne
pobudzenie określane jest symbolem net. W związku z czym funkcję aktywacji
można zapisać jako
).
(net
f
Łączne pobudzenie net jest odpowiednikiem potencjału pobudzającego w
neuronie biologicznym.
3
Typowymi funkcjami aktywacji, najczęściej stosowanymi przy konstruowaniu
zarówno programowych jak i sprzętowych realizacji sztucznych sieci neuronowych
są
,
0
,
1
)
exp(
1
2
)
(
net
net
f
oraz
.
0
,
1
,
0
,
1
)
sgn(
)
(
net
gdy
net
gdy
net
net
f
Powyższe funkcje aktywacji zwane są odpowiednio bipolarną funkcją ciągłą
i bipolarną funkcją binarną (dyskretną). Odpowiednio skalując powyższe funkcje
możemy otrzymać odpowiednio unipolarną funkcję ciągłą oraz unipolarną funkcję
binarną dane wzorami:
,
0
,
)
exp(
1
1
)
(
net
net
f
oraz
.
0
,
0
,
0
,
1
)
(
net
gdy
net
gdy
net
f
Pierwsze z tych funkcji nazywane są funkcjami sigmoidalnymi.
Istotnymi z punktu widzenia projektowego parametrami opisującymi neuron
są moc śladu pamięciowego (wektor wag), moc sygnału wejściowego.
W naszym programie zaprezentujemy model sztucznego neuronu
umożliwiające zmianę wartości wektora wag oraz sygnału wejściowego. Oraz
automatyczne obliczenie mocy sygnału wejściowego, mocy śladu pamięciowego
jak i łącznego pobudzenia neuronu. Pokazane też zostaną wartości dwóch funkcje
aktywacji: ciągłej sigmoidalnej oraz bipolarnej dla wyznaczonego łącznego
pobudzenia neuronu.
4

Poniżej przedstawiamy algorytmy obliczające wyjście neuronu (dwie
funkcje) przy zadanych wagach oraz sygnale wejściowym oraz parametry: moc
śladu pamięciowego i moc sygnału wejściowego oraz łączne pobudzenie.
struktury danych algorytmu:
sygnały [5] - wektor sygnałów wejściowych (5 sygnałów wejściowych),
wagi [5]
- wektor wag dla wejść (5 wartości wektora wag),
moc_sladu
- moc śladu pamięciowego,
moc_sygnalu
- moc sygnału wejściowego,
net - łączne pobudzenie neuronu obliczone z zadanych wektorów wag oraz
sygnału wejściowego,
lambda
- parametr
ciągłej sigmoidalnej funkcji aktywacji neuronu,
c_funkcja
- wartość
ciągłej
funkcji
aktywacji
,
0
,
1
)
exp(
1
2
)
(
net
net
f
dla obliczonego łącznego pobudzenia neuronu,
d_funkcja
- wartość dyskretnej, unipolarnej funkcji aktywacji
.
0
,
1
,
0
,
1
)
sgn(
)
(
net
gdy
net
gdy
net
net
f
dla obliczonego łącznego pobudzenia
neuronu,
moc sygnału wejściowego:
moc_sygnalu := 0;
for i := 1 to 5 do
moc_sygnalu := moc_sygnalu + sygnaly[i] * sygnaly[i];
moc śladu pamięciowego:
moc_sladu := 0;
for i := 1 to 5 do
5

moc_sladu := moc_sladu + wagi[i] * wagi[i];
łączne pobudzenie neuronu:
net := 0;
for i := 1 to 5 do
net := net + wagi[i] * sygnaly[i];
ciągła funkcja aktywacji:
c_funkcja := -1.0 + 2.0/(1+exp(-lambda*net));
dyskretne, unipolarna funkcja aktywacji:
d_funkcja := -1.0;
if net >= 0 then
d_funkcja := 1.0;
Jak widać z przedstawionego algorytmu neuron w przykładzie jest jedne
(jeden zestaw wejść i wag) ale posiada, dla potrzeb prezentacji, trzy rodzaje
odpowiedzi: Łączne pobudzenie, Ciągłą funkcję aktywacji oraz Binarną funkcję
aktywacji przez co reprezentuje dwa rodzaje neuronów: zarówno liniowe jak i
nieliniowe.
3.2 Prosta sieć neuronowa (z WAT)
Sieć neuronowa złożona jest z trzech nie powiązanych ze sobą neuronów.
Każdy z neuronów posiada pięć wag; do każdego neuronu doprowadzony jest ten
sam sygnał wejściowy. Działanie jednowarstwowej , trzyelementowej sieci oparte
jest na zasadzie WAT (ang. Winer Take All) - zwycięzca bierze wszystko. Polega
ona na tym, że do każdego z neuronów sieci doprowadza się ten sam sygnał
wejściowy, następnie zostaje wyliczona wartość wyjściowa dla każdego neuronu.
Neuron o największej (powyżej progowej wartości) wartości wyjścia zostaje
6

zwycięzcą co dalej dla takiej sieci i takiego neuronu może rodzić różnorakie
konsekwencje. Może to predysponować taki neuron do dalszego uczenia albo
może np. stanowić wskazanie przynależności (faza eksploatacji lub testowania)
obiektu definiowanego przy pomocy wektora wejściowego do klasy obiektów
rozpoznawanych przez dany neuron (np. opis wrony poprzez odpowiednie wejście
może być rozpoznane przez poprawnie nauczoną sieć jako obiekt przynależny do
ptaków i do niczego więcej).
Praca danej sieci z zaimplementowanym progiem i przepisem działania
WAT odbywa się według algorytmu:
struktury danych algorytmu:
NA1, NA2, NA3, NA4, NA5 - wagi neuronu A, wektor wag neuronu A to
[NA1, NA2, NA3, NA4, NA5]
NB1, NB2, NB3, NB4, NB5 - wagi neuronu B, wektor wag neuronu B to
[NB1, NB2, NB3, NB4, NB5]
NC1, NC2, NC3, NC4, NC5 - wagi neuronu C, wektor wag neuronu C to
[NC1, NC2, NC3, NC4, NC5]
Ob1, Ob2, Ob3, Ob4, Ob5 - kolejne wartości wektora sygnału wejściowego
wektor wejściowy to [Ob1, Ob2, Ob3, Ob4, Ob5]
T
{ ----- wyjście dla neuronu A ----- }
Wyj := NA1 * Ob1 + NA2 * Ob2 + NA3 * Ob3 + NA4 * Ob4 + NA5
* Ob5;
TabPom[1] := Wyj;
{ ----- wyjście dla neuronu B ----- }
Wyj := NB1 * Ob1 + NB2 * Ob2 + NB3 * Ob3 + NB4 * Ob4 + NB5
* Ob5;
TabPom[2] := Wyj;
{ ----- wyjście dla neuronu C ----- }
Wyj := NC1 * Ob1 + NC2 * Ob2 + NC3 * Ob3 + NC4 * Ob4 + NC5
* Ob5;
TabPom[3] := Wyj;
7

{ zostały wyliczone wartości wyjść dla poszczególnych
neuronów}
{teraz przechodzimy do ustalenia zwycięzcy - neuronu który
zidentyfikował obiekt}
struktury danych algorytmu klasyfikacji WAT z progiem:
MaxWin - wartość progowa dla rozpoznawanych obiektów - wyjść
poszczególnych neuronów zapisanych w trzyelementowej tablicy TabPom.
Winner - numer neuronu który rozpoznał obiekt
MaxWin - wartość określa próg przy którym można mówić o zwycięzcy. Jeśli
wszystkie wartości wyjściowe poszczególnych neuronów są mniejsze od wartości
progowej algorytm nie wyłania zwycięzcy przez co dany wektor sygnałów
wejściowych jest odrzucany przez sieć trzech neuronów.
Winer := 0;
MaxWin := Prog;
for I := 1 to 3 do
if MaxWin <= TabPom[I] then
begin
MaxWin := TabPom[I];
Winer := I;
end;
{jeśli Winner jest równy 0, to znaczy, ze sieć nie potrafi
zidentyfikować obiektu}
W przykładzie zostały wagi odpowiednio nazwane a wybór odpowiedniego -
zwycięskiego - neuronu jest równoważny w rozpoznaniu wejścia jako nazwanego
obiektu o określonych cechach (wartościami wag).
8

3.3 Uczenie pojedynczego neuronu
Sztuczny neuron przetwarza informacje wejściowe xi na pewien sygnał
wyjściowy y. Neurony traktować można jako elementarne procesory o
następujących właściwościach:
każdy neuron otrzymuje wiele sygnałów wejściowych i wyznacza na ich
podstawie jeden sygnał wyjściowy,
z każdym oddzielnym wejściem neuronu związany jest parametr nazywany
wagą,
sygnał wchodzący określonym wejściem jest najpierw przemnażany przez
wagę danego wejścia, w związku z czym w dalszych obliczeniach uczestniczy
już w formie zmodyfikowanej,
sygnały wejściowe (przemnożone przez odpowiednie wagi) są w neuronie
sumowane, dając pewien pomocniczy sygnał wewnętrzny nazywany czasem
łącznym pobudzeniem neuronu (w literaturze angielskiej net value),
do tak utworzonej sumy sygnałów dodaje niekiedy (nie we wszystkich typach
sieci) dodatkowy składnik niezależny od sygnałów wejściowych, nazywany
progiem (w literaturze angielskiej bias),
suma przemnożonych przez wagi sygnałów wewnętrznych z dodanym
(ewentualnie) progiem może być bezpośrednio traktowana jako sygnał
wyjściowy neuronu ( w sieciach o bogatszych możliwościach sygnał wyjściowy
neuronu obliczany jest za pomocą zależności nieliniowej między łącznym
pobudzeniem a sygnałem wyjściowym).
Każdy neuron dysponuje pewną wewnętrzną pamięcią (reprezentowaną
przez aktualne wartości wag i progu) oraz pewnymi możliwościami przetwarzania
wejściowych sygnałów w sygnał wyjściowy.
Proces uczenia neuronu sprowadza się do modyfikowania współczynników
wagowych neuronu w taki sposób, by neuron działał zgodnie z oczekiwaniami
użytkownika. W przykładzie tym wykorzystaliśmy uczenie z nauczycielem.
9

Uczenie z nauczycielem polega na tym, że neuronowi podaje się przykłady
poprawnego działania, które powinien on potem naśladować w swoim bieżącym
działaniu. Przykład należy rozumieć w ten sposób, że nauczyciel podaje konkretne
sygnały wejściowe i wyjściowe, pokazując, jaka jest wymagana odpowiedź sieci
dla pewnej konfiguracji danych wejściowych. W typowym procesie uczenia sieć
otrzymuje od nauczyciela ciąg uczący i na jego podstawie uczy się prawidłowego
działania, stosując jedną z wielu znanych dziś strategii uczenia
Najbardziej znaną z reguł uczenia z nauczycielem jest reguła delta.
Polega ona na tym, że każdy neuron po otrzymaniu na swoich wejściach
określone sygnały (z wejść sieci albo od innych neuronów, stanowiących
wcześniejsze warstwy sieci) wyznacza swój sygnał wyjściowy wykorzystując
posiadaną wiedzę w postaci wcześniej ustalonych wartości wag, wartości wejść
oraz (ewentualnie) progu. Wartość sygnału wyjściowego, wyznaczonego przez
neuron na danym kroku procesu uczenia porównywana jest z odpowiedzią
wzorcową podaną przez nauczyciela w ciągu uczącym. Jeśli występuje
rozbieżność - neuron wyznacza różnicę pomiędzy swoim sygnałem wyjściowym a
tą wartością sygnału, która była by - według nauczyciela prawidłowa. Ta różnica
oznaczana jest zwykle symbolem greckiej litery
(delta) i stąd nazwa opisywanej
metody.
Sygnał błędu (delta) wykorzystywany jest przez neuron do korygowania
swoich współczynników wagowych (i ewentualnie progu), stosując następujące
reguły:
wagi zmieniane są tym silniej, im większy błąd został wykryty,
wagi związane z tymi wejściami, na których występowały duże wartości
sygnałów wejściowych, zmieniane są bardziej, niż wagi wejść, na których
sygnał wejściowy był niewielki.
W naszym przykładzie o zakończeniu procesu uczenia decyduje
użytkownik. Proces uczenia może zostać uznany za zakończony gdy wyliczane po
każdym kroku uczenia błędy są małe - powodują one minimalne korekty wag.
0

Program wczytuje dane z pliku zawierającego ciąg uczący (dane wejściowe
i wzorcowe odpowiedzi) klasyfikuje obiekty, których dane są w tym pliku kolejno
zapisane.
Podczas symulowanego uczenia użytkownik może śledzić w kolejnych
krokach postęp uczenia, obserwując, jak zmieniają się współczynniki wag i błąd.
struktury danych algorytmu:
wyjscie
- sygnał wyjściowy, odpowiedź neuronu dla zadanego sygnału
wejściowego
wagi
- wektor wag neuronu, modyfikowany w trakcie uczenia neuronu,
sygnaly - sygnały wejściowe; sygnały wczytywane są z pliku zewnętrznego – ciągu
uczącego,
blad
- wartość błędu wyliczana po każdej iteracji uczenia,
prawidlowe
- wzorcowa prawidłowa wartość wyjścia (wczytywana z ciągu
uczącego),
wspolczynnik - wartość współczynnika uczenia, ustalana przez użytkownika
Neuron ma 5 wejść, początkowe wartości współczynników wagowych są
otrzymywane za pomocą generatora liczb pseudolosowych.
wyliczanie sygnału wyjściowego:
wyjscie := 0;
for i := 1 to 5 do
wyjscie := wyjscie + wagi[i] * sygnaly[i];
błąd po każdym kroku:
blad := prawidlowe - wyjscie;
1

modyfikacja wag, na podstawie wyliczonego błędu:
for i := 1 to 5 do
wagi[i] := wagi[i] + wspolczynnik * blad * sygnaly[i];
Testowanie neuronu polega na podawanie na jego wejścia określonych
przez użytkownika sygnałów. Neuron wylicza dla tych wartości wejść sygnał
wyjściowy.
3.4 Uczenie prostej sieci
Możliwe są dwa warianty procesu (strategii) uczenia sieci neuronowej: z
nauczycielem i bez nauczyciela.
Uczenie z nauczycielem polega na tym, że sieci podaje się przykłady
poprawnego działania które powinna ona potem naśladować w swoim bieżącym
działaniu (w czasie egzaminu). Przykład należy rozumieć jako konkretnych
sygnałów wejściowych i odpowiadających im sygnałów wyjściowe. W typowym
procesie uczenia sieć otrzymuje od nauczyciela ciąg uczący i na jego podstawie
uczy się prawidłowego działania.
Obok opisanego wyżej schematu uczenia z nauczycielem występuje też
szereg metod tak zwanego uczenia bez nauczyciela (albo samouczenia sieci).
Metody te polegają na podawaniu na wejście sieci wyłącznie szeregu
przykładowych danych wejściowych, bez podawania informacji dotyczącej
oczekiwanych sygnałów wyjściowych. Odpowiednio zaprojektowana sieć potrafi
zinterpretować sygnały wejsciowe i zbudować na ich podstawie sensowny
algorytm swojego działania - najczęściej polegający na tym, że automatycznie
wykrywane są klasy powtarzających się sygnałów wejściowych i sieć uczy się
(spontanicznie, bez jawnego nauczania) rozpoznawać te typowe wzorce
sygnałów.
Uczenie może odbywać się zgodnie z jedną z wielu reguł uczenia. Do
najbardziej znanych należą:
2

Reguła Hebba
W tej regule przyrost wag łączących węzeł [i] i węzeł [j] jest proporcjonalny
do współczynnika uczenia, do wartości aktywacji wyjścia y
j
z neuronu [j] oraz
agregacji wejść do neuronu [i], tj. x
i
.
)
(
)
(
)
(
)
1
(
t
x
t
y
t
w
t
w
i
j
ij
ij
Reguły należy do reguł uczenia bez nadzoru.
Reguła Delta
Jest to reguła uczenia z nauczycielem. Można zapisać ja w postaci:
)
(
))
(
(
'
))
(
(
)
(
(
)
(
)
1
(
t
x
t
y
f
t
y
f
t
y
t
w
t
w
i
j
j
j
ij
ij
Inne znane reguły uczenia to reguła LMS oraz reguła Widrow-Hoffa.
Przygotowany przez nas program wczytuje dane z pliku zawierającego ciąg
uczący (dane wejściowe i wzorcowe odpowiedzi) klasyfikuje obiekty, których dane
są w tym pliku kolejno zapisane.
Podczas symulowanego uczenia użytkownik może śledzić w kolejnych
krokach postęp uczenia, obserwując, jak zmieniają się współczynniki wag i błąd .
Sieć składa się z 3 neuronów, z których każdy ma 5 wejść, początkowe
wartości współczynników wagowych są otrzymywane za pomocą generatora
liczb pseudolosowych.
struktury danych algorytmu:
wyjscie
- wektor sygnałów wyjściowych,
wagi
- tablica zawierająca wagi wszystkich neuronów,
sygnaly
- wektor sygnałów wejściowych; sygnały wczytywane są z pliku
zewnętrznego – ciągu uczącego,
blad
- wektor wartość błędu wyjść sieci wyliczany po każdej iteracji uczenia,
3

prawidlowe
- wzorcowa prawidłowa wartość wyjścia j (wczytywana z ciągu
uczącego),
wspolczynnik - wartość współczynnika uczenia, ustalana przez użytkownika.
wyliczenie sygnałów wyjściowych:
for j := 1 to 3 do begin
wyjscie[j] := 0;
for i := 1 to 5 do
wyjscie[j] := wyjscie[j] + wagi[j, i] * sygnaly[i];
blad[j] := prawidlowe[j] - wyjscie[j];
end;
błąd po każdym kroku:
blad[j] := prawidlowe[j] – wyjscie[j];
modyfikacja wag, na podstawie wyliczonego błędu:
for i := 1 to 5 do
wagi[j, i] := wagi[j, i] + wspolczynnik * blad[j] *
sygnaly[i];
Testowanie odbywa się poprzez podanie na wejścia sieci określonych przez
użytkownika sygnałów.
3.5 Sieć neuronowa jako filtr sygnału z zakłóceniami
Kiedy sieć neuronowa ma dokładnie tyle samo neuronów wejściowych co
wyjściowych oraz jej proces uczenia oraz pracy zasadza się na stanie
przyporządkowania (odtworzenia) sygnałowi wejściowemu dokładnie określonego
sygnału wyjściowego mamy wtedy do czynienia z siecią autoasocjacyjną (albo
4

skojarzeniową). Sieci takie w swym zamyśle konstrukcyjnym nie mają za zadanie
odtwarzać dokładnie sygnału wejściowego na wyjściu. Idea pracy takiej sieci
polega na tym, że sieć po otrzymaniu na wejście sygnału podobnego do sygnału
uczestniczącego w procesie uczenia odtworzy (skojarzy) na wyjściu wzorzec
odpowiadający sygnałowi z fazy uczenia.
Podstawową zasadą uczenia jest to aby sieć trenowała swe „umiejętności”
odtwarzanie wzorca (kilku – kilkunastu wzorców – to zależy od pojemności
pamięciowej sieci, w przybliżeniu od ilości neuronów w warstwie ukrytej)
podawanego na wejście w różnych odmianach (np. w różny sposób zakłóconego).
Jeśli dane mają postać szeregu czasowego, to warianty otrzymuje się dla różnych
opóźnień w czasie (kątów przesunięcia fazowego).
Jednym z istotnych zastosowań autoasocjacyjnej sieci neuronowej jest
wykrywanie sygnału na tle szumu.
W naszym programie zaprezentujemy uczenie sieci filtrowania zadanego
sygnału. Sygnał wprowadzany jest do programu przy pomocy pliku zawierającego
trzy kolumny:
sygnał synchronizujący (można interpretować jako czas lub oś x na wykresie)
sygnał czysty, wzorcowy taki jaki sieć ma rozpoznawać z zaszumionego
sygnał zakłócony, stanowiący postawę uczenia sieci, jak i stanowiący postawę
wstępnego testowania.
W przypadku gdy jesteśmy zadowoleni już z efektów działania naszej
wytrenowanej sieci na wejście (zmiana pliku) można podać inaczej zakłócony
sygnał wejściowy – dla testowania.
struktury danych dla algorytmu uczenia:
NRob - liczność zbioru uczącego, określana automatycznie na podstawie
ilości elementów zapisanych w pliku ciągu uczącego
5

M - ilość wag w neuronie, w programie ustalona arbitralnie na 5, można to
zmodyfikować poprzez ingerencję w dostarczony kod źródłowy programu
prezentacyjnego,
WagiSieci - tablica określająca rozmiar sieci, ilość elementów sieci –
neuronów o M. wagach wynosi NRob, liczebność tablicy to iloczyn M*NRob
WykArr - tablica z ciągami wzorcowym oraz zaszumionym (liczebność
NRob*2)
aynok - stała określająca wektor ciągu uczącego w tablicy WayArr – wzorzec
z zakłóceniami
ayok - stała określająca wektor ciągu uczącego w tablicy WayArr – wzorzec
bez zakłóceń
Wspolczynnik – parametr określający szybkość uczenia neuronów, przed
procesem uczenia użytkownik może
Randomize;
for J := 1 to NRob do
begin
for I := 1 to M do
WagiSieci[J, I] := -0.1 + 0.2 * Random;
if { uczenia ma uwzględniać wagę środkową } then
WagiSieci[J, Krok] := 1.0;
end;
for K := 1 to { ilość prezentacji ciągu uczącego} do
begin
for J := Krok - 1 TO (NRob – Krok) do
begin
Wyjscie := 0.0;
for I := 1 to M do
Wyjscie := Wyjscie+WagiSieci[J,I]*WykArr[J+I-Krok,
aynok];
{ obliczenie błędu między wyjściem a wzorcem }
6

Blad := WykArr[J, ayok] - Wyjscie;
{ korekta wag }
for I := 1 to M do
WagiSieci[J, I] := WagiSieci[J,I]+ Wspolczynnik*
Blad*WykArr[J+I-Krok, aynok];
end; {of J := ...}
end; {of K := ...}
Testowanie odbywa się poprzez podanie na wejście sieci sygnału
zaszumionego. Uzyskuje się w ten sposób wykresy z nałożonym (opcjonalnie)
sygnałem wzorcowym, sygnałem zakłóconym lub/i sygnałem przefiltrowanym.
3.6 Rozpoznawanie obrazu
Jak widać było we wcześniejszej części niniejszego opracowania dziedzina
sieci neuronowych przeżywa wzloty i upadki. Niewątpliwie wielkim osiągnięciem w
tej materii jest opracowanie mechanizmów definicji oraz konstrukcji
wielowarstwowych sieci nieliniowych. Sieci takie posiadają wręcz nieograniczone
możliwości przynajmniej jak na razie nie zostały one znalezione jak miało to
miejsce dla sieci liniowych – publikacja Minsky’ego i Paperta. [11] Na pewno to
opracowanie nie stanowiłoby przynajmniej próby ogarnięcia i zaprezentowania
najistotniejszych zagadnień sieci neuronowych gdybyśmy nie pokusili się o
przedstawienie uczenia i pracy takiej sieci.
W przypadku konstrukcji wielowarstwowych sieci neuronowych korzysta się
przeważanie z definicji nieliniowości neuronu określonej rozdziale Prezentacja
neuronu tej pracy. Jeśli zaś chodzi o sferę związaną z topologią połączeń to
wyróżnia się w takich układach następujące elementy:
warstwa wejściowa – zawiera ona tyle neuronów aby pokryć w pełni dziedzinę
cech opracowywanego zjawiska czy obiektu; w większości przypadków
warstwa ta nie będzie podlegać uczeniu; pełnić będzie rolę dyskryminacyjne
oraz normalizacyjne dla sygnałów podlegających obróbce w dalszej strukturze
sieci
7
warstwa ukryta – raczej powinno się tu mówić o warstwach ukrytych; one to
stanowią o jakości sieci, jej potencjale pamięciowym, skomplikowaniu
możliwego odwzorowania realizowanego przez sieć, o sposobie uczenia całej
sieci; połączenie pomiędzy warstwami odbywają się na zasadzie wyjścia jednej
warstwy stanowią wejścia następnej warstwy; uczeniu podlegają wszystkie
neurony wchodzące w skład warstw ukrytych
warstwa wyjściowa – ma w zasadzie dwa zadania odebrać „odpowiedź”
(przetworzony sygnał) warstw ukrytych oraz odpowiednio go przeskalować dla
potrzeb danej realizacji; warstwa wyjściowa zwykle podlega uczeniu ale może
być zmienione zgodnie z potrzebami konkretnej implementacji.
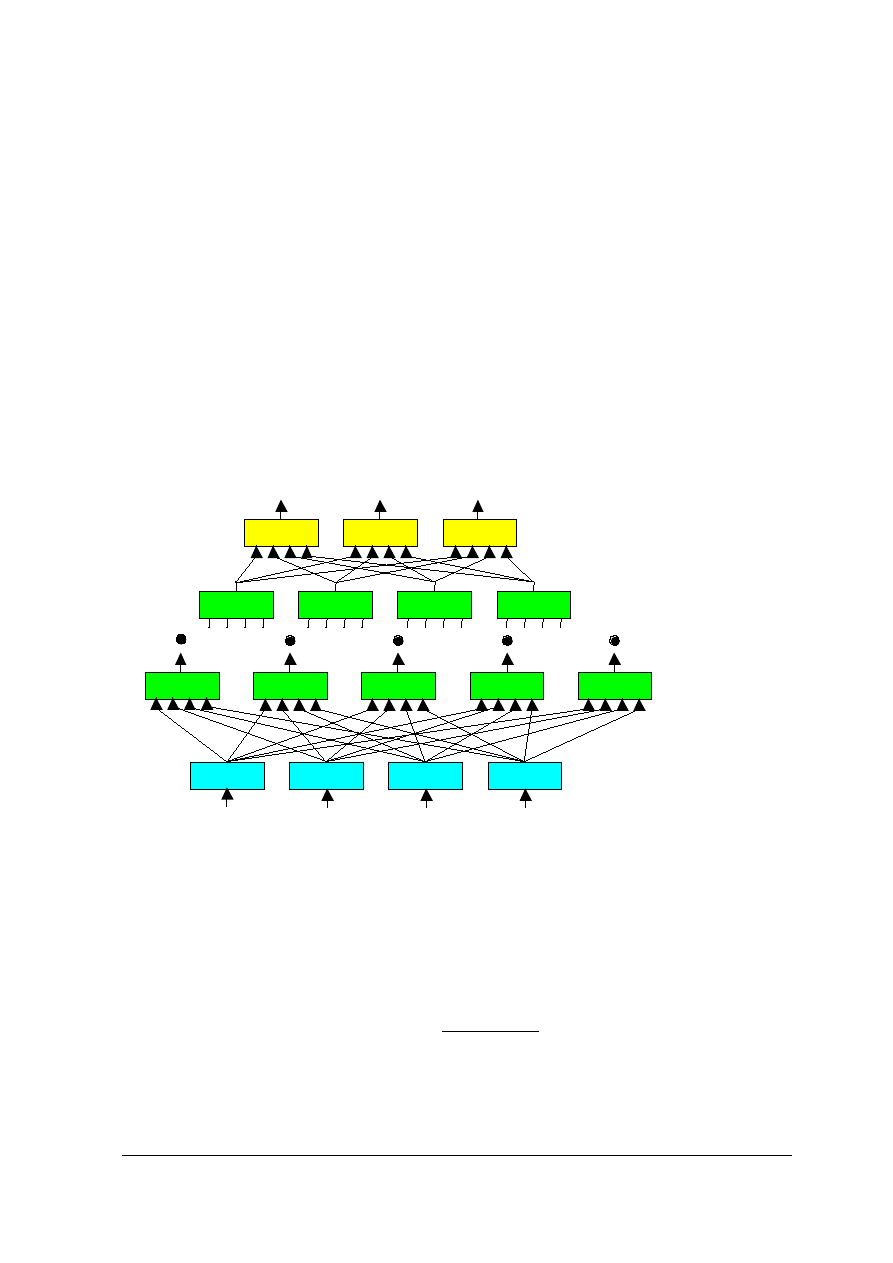
Rysunek poniższy w sposób obrazowy przedstawia jak modelowo
konstruuje się wielowarstwowe sieci neuronowe:
warstwa
wejściowa
pierwsza
warstwa
ukryta
warstwa
ukryta
n-ta
warstwa
wyjściowa
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
neuron
Rys. 1. Model budowy wielowarstwowej sieci neuronowej
W programie przedstawiono aspekt uczenia i testowania po każdym kroku
sieci neuronowej, wielowarstwowej z definicją nieliniowości pojedynczego neuronu
daną wzorem:
)
exp(
1
1
)
(
net
net
f
8

gdzie net jest wartością dla neuronu (m) w warstwie (0..n+1):
dla warstwy wejściowej (0) – neuron posiada n1 – wag z doprowadzonymi
sygnałami wejściowymi X :
1
0
)
0
)(
(
)
0
)(
(
n
i
i
m
i
m
x
w
net
dla warstw ukrytych (1..n); k – jest to ilość wag warstwy (j) a jednocześnie
ilość neuronów w warstwie poprzedniej; y(i)(j-1) – odpowiedź i-tego neuronu
warstwy (j-1)
k
i
j
i
j
m
i
j
m
y
w
net
0
)
1
)(
(
)
)(
(
)
)(
(
dla warstwy wyjściowej mamy związek odpowiednio taki, jak dla warstw
ukrytych
k
i
n
i
n
m
i
n
m
y
w
net
0
)
)(
(
)
1
)(
(
)
1
)(
(
Sieć posiada dwa neurony warstwy wejściowej dwie warstwy ukryte o ilości
elementów definiowanych przez użytkownika oraz jeden neuron wyjściowy. Taka
konstrukcja posłuży nam do nauczenia sieci rozpoznawania obrazu
dwuwymiarowego przedstawionego w postaci figur geometrycznych (kół)
nakładanych na siebie.
struktury danych algorytmu:
LW
- ogólna liczba warstw (ukryte plus dwie); jeśli w określeniu ilości
neuronów w warstwach ukrytych podamy 0 to możemy otrzymać sieć
wielowarstwową z warstwą wejściowa i wyjściową,
n
- tablica z informacją ile elementów (neuronów) znajduje się w
poszczególnych warstwach – tablica ta pełni funkcje sterująca dla ogólnej tablicy
wag,
9

yy
- tablica odpowiedzi poszczególnych neuronów w danym kroku dla
wszystkich warstw,
Wagi - wielowymiarowa tablica wag całej sieci (trzy wymiarowa: warstwa,
neuron, nr wagi w neuronie),
alfa - momentum – wpływ zmian w poprzednim kroku na zmiany w kroku
bieżącym
eta
- współczynnik uczenia
sigma - tablica pomocnicza pamiętająca propagację błędu w danym kroku
generacja wartości odpowiedzi sieci w bieżącym kroku:
for i := 1 to LW do
for k := 0 to n[i] - 1 do
begin
yy[i,k] := 0;
yy[i-1,n[i-1]] := -1;
for j := 0 to n[i-1] do
yy[i,k] := yy[i,k] + yy[i-1,j]*Wagi[i,j,k];
yy[i,k] := 1.0 / (1.0+Exp(-yy[i,k]));
end;
uczenie wielowarstwowej sieci neuronowej (backpropagation):
for i := LW downto 1 do
for j := 0 to n[i] - 1 do
begin
if i = LW then
blad := dd[j] - yy[i,j]
else
begin
blad := 0.0;
for k := 0 to n[i+1] - 1 do
0

blad := blad + sigma[i+1,k]*Wagi[i+1,j,k];
end;
sigma[i,j] := blad*yy[i,j]*(1-yy[i,j])
end;
Wagi2 := Wagi;
for i := 1 to LW do
for j:= 0 to n[i-1] do
for k := 0 to n[i] - 1 do
begin
zmiana := alfa*(Wagi[i,j,k]-Wagi1[i,j,k]);
zmiana := eta*sigma[i,k]*yy[i-1,j] - zmiana;
Wagi[i,j,k] := Wagi[i,j,k] + zmiana;
end;
Wagi1 := Wagi2;
Wielowarstwowe, nieliniowe sieci neuronowe stanowią obecnie jedną z
najważniejszych dziedzin sfery określanej mianem Sztuczne sieci neuronowe.
3.7 Backpropagation - najpopularniejsza metoda uczenia
liniowych sieci neuronowych
Algorytm wstecznej propagacji błędu (backpropagation) jest obecnie
podstawowym (i jednym z najskuteczniejszych) algorytmem nadzorowanego
uczenia wielowarstwowych jednokierunkowych sieci neuronowych.
Nazwa tego algorytmu wynika z kolejności obliczania sygnałów błędu
,
która przebiega w kierunku odwrotnym niż przechodzenie sygnałów przez sieć, to
znaczy od warstwy wyjściowej poprzez warstwy ukryte w kierunku warstwy
wejściowej.
1

Ogólnie algorytm propagacji wstecznej wymaga dla każdego wzorca
uczącego wykonania następujących czynności:
Założenia: dana jest sieć o M warstwach, oraz zestaw danych uczących E =
{E
1,
E
2
...E
N
}, gdzie każdy z przykładów składa się z wektora danych wejściowych X
i z wektora wyjść D.
Przypisz wszystkim wagom wartości losowe bliskie 0. Wybierz wzorzec uczący
E
K
.
Podaj wektor uczący E
K
na wejście sieci
Wyznacz wartości wyjść każdego elementu dla kolejnych warstw
przetwarzania, od pierwszej warstwy ukrytej do warstwy wyjściowej
Oblicz wartość
M
i
błędów dla warstwy wyjściowej
M
i
= f (x
i
l-1
(t)) [d
i
- y
i
M
(t)]
Wyznacz kolejno błędy w warstwach l = M., M.-1, ...2 według postępowania
l-1
i
(t) = f (x
i
l-1
(t) )
i
w
l
ji
(t)
l
i
(t)
Wyznacz zmianę wartości wag
w
l
ij
(t) =
l
i
(t) x
i
l-1
(t)
Modyfikuj wszystkie wagi
w
l
ji
(t+1) = w
l
ji
(t) +
w
l
ij
(t)
Wybierz kolejny wzorzec (o ile istnieje) i przejdź do punktu 2 (wczytanie
wzorca)
W trakcie uczenia sieci można zaprezentować dowolną liczbę wzorców
uczących. Jeśli sieć ma pracować z danymi zakłóconymi to część wektorów
uczących powinna również zawierać zakłócenie. Jest to związane ze zdolnością
sieci do uogólniania - niewielkie zaburzenie sygnałów wzorcowych może
spowodować przyspieszenie zbieżności procesu uczenia ( choć sygnał zaburzony
nigdy może się nie pojawić w rzeczywistej pracy sieci ).
2

Inne zasady obowiązujące przy konstruowaniu ciągów uczących zostały
przedstawione w punkcie Projektowanie zbioru uczącego.
Pierwszą operacją w procesie uczeni jest inicjalizacja początkowego układu
wag. Należy unikać symetrii w warstwach wag początkowych (mogłoby to
spowodować nie nauczenie się sieci ). Najskuteczniejszym rozwiązaniem wydaje
się być losowy wybór wag początkowych.
Istotnym problemem jest wybór współczynnika uczenia
. Parametr ten
decyduje o szybkości i stabilności procesu uczenia. Przy zbyt małej wielkości tego
współczynnika uczenie postępuje w bardzo wolnym tempie, i sieć potrzebuje b.
dużej liczby operacji, by się nauczyć. W przypadku zbyt dużej wartości tego
współczynnika algorytm może stać się niestabilny.
Wartość współczynnika
dobiera się zazwyczaj z przedziału [0.05 , 0.25].
obliczenia przejścia sygnału w sieci - struktury danych algorytmu:
iKrok – zmienna kontrolna programu – pokazująca, na którym kroku
jest
sieć
RN1, RN2, RN3, RN4 – obiekty typu neuron, przy czym RN1 i RN2
stanowią warstwę ukrytą, RN3 i RN4 – warstwę wyjściową.
begin
if (iKrok1 < 1) or (iKrok1 > 5) then
iKrok1 := 1;
case iKrok1 of
1: begin
Tytul1(‘OBLICZENIE SUMY ILOCZYNÓW SYGNAŁÓW
WEJŚCIOWYCH ORAZ’,0);
Tytul1(‘WAG WARSTWY UKRYTEJ’,1);
RN1.Krok1(We1.Value,We2.Value,Bias.Value);
RN2.Krok1(We1.Value,We2.Value,Bias.Value);
{przerysowanie ekranu, uwzględnienie zmian}
end;
3
2: begin
Tytul1(‘OBLICZENIE ODPOWIEDZI NEURONÓW WARSTWY
UKRYTEJ’,0);
Tytul1(‘’,1);
RN1.Krok2;
RN2.Krok2;
end;
3: begin
Tytul1(‘OBLICZENIE SUMY ILOCZYNÓW WYJŚĆ
WARSTWY UKRYTEJ ORAZ’,0);
Tytul1(‘WAG WARSTWY WYJŚCIOWEJ’,1);
RN3.Krok1(RN1.Odp.Value,RN2.Odp.Value,
Bias.Value);
RN4.Krok1(RN1.Odp.Value,RN2.Odp.Value,
Bias.Value);
{przerysowanie ekranu, uwzględnienie zmian}
end;
4: begin
Tytul1(‘OBLICZENIE ODPOWIEDZI NEURONÓW WARSTWY
WYJŚCIOWEJ’,0);
Tytul1(‘’,1);
RN3.Krok2;
RN4.Krok2;
end;
5: begin
Czysc;
Tytul1(‘PARAMETRY SIEĆ NEURONOWEJ ZOSTAŁY
OKREŚLONE’,0)
end;
end;
4

{przerysowanie ekranu – uwzględnienie zmian}
Inc(iKrok1);
end;
Procedury wywoływane w algorytmie głównym:
procedure TRN.Krok2;
begin
Odp.Value := 1.0/(1.0+exp(-SumWe.Value));
Odp.Text := FloatToStrF(Odp.Value,ffFixed,18,4);
end;
procedure TRN.Krok1(x1,x2,x3: Extended);
begin
Wej[1] := x1;
Wej[2] := x2;
Wej[3] := x3;
SumWe.Value := W[1].Value*x1 + W[2].Value*x2 + W[3].
Value*x3;
SumWe.Text := FloatToStrF(SumWe.Value,ffFixed,18,4);
end;
uczenie sieci - struktury danych algorytmu:
RN21, RN22, RN23, RN24, RN25, RN26 – obiekty typu neuron, przy czym
RN21 i RN22 stanowią warstwę wejściową, RN23 i RN24 – warstwę ukrytą, RN25
i RN26 – warstwę wyjściową.
5

Wyznaczenie błędów dla warstwy wyjściowej
begin
Tytul2('SIEĆ WYZNACZA BŁĘDY NEURONÓW WARSTWY
WYJŚCIOWEJ');
RN21.SetEtaAlfa(eta.Value,alfa.Value);
RN22.SetEtaAlfa(eta.Value,alfa.Value);
RN23.SetEtaAlfa(eta.Value,alfa.Value);
RN24.SetEtaAlfa(eta.Value,alfa.Value);
RN25.SetEtaAlfa(eta.Value,alfa.Value);
RN26.SetEtaAlfa(eta.Value,alfa.Value);
RN25.SetBlad(z1.Value);
RN26.SetBlad(z2.Value);
end;
Wsteczne rzutowanie błędu
begin
Tytul2('SIEĆ RZUTUJE WSTECZNIE BŁĘDY DO WARSTW
UKRYTYCH');
{ wylicznie sigmy dla neuronu }
RN25.ClcSigma;
RN26.ClcSigma;
{ proagacja wsteczna błędu }
RN23.ClcBladBP(RN25,RN26,1);
RN24.ClcBladBP(RN25,RN26,2);
RN23.PokazBlad(True);
RN24.PokazBlad(True);
{ wylicznie sigmy dla neuronu }
RN23.ClcSigma;
RN24.ClcSigma;
end;
6

Modyfikacja wag :
begin
Tytul2('SIEĆ USTALA NOWE WARTOŚCI
WSPÓŁCZYNNIKÓW WAG NEURONÓW');
RN23.ObliczNoweWagi(alfa.Value,eta.Value);
RN23.PokazNoweWagi(True);
RN24.ObliczNoweWagi(alfa.Value,eta.Value);
RN24.PokazNoweWagi(True);
RN25.ObliczNoweWagi(alfa.Value,eta.Value);
RN25.PokazNoweWagi(True);
RN26.ObliczNoweWagi(alfa.Value,eta.Value);
RN26.PokazNoweWagi(True);
end;
Kluczowe procedury wywoływane w algorytmie głównym:
procedure TRN.ObliczNoweWagi(pAlfa,pEta: Extended);
var
zm,W2: Extended;
i: integer;
begin
for i := 1 to 3 do begin
W2 := W[i].Value;
zm := pAlfa * (W[i].Value-W1[i]);
zm := pEta * Sigma*Wej[i] - zm;
WNew[i].Value := W[i].Value + zm;
W1[i] := W2;
end;
end;
procedure TRN.ClcSigma;
begin
Sigma := Blad.Value * Odp.Value * (1.0 - Odp.Value);
{ funckcja odwrotna dla funkcji aktywacji neurony }
7

end;
procedure TRN.ClcBladBP(pRN1,pRN2: TRN; nrWagi: integer);
begin
Blad.Value := pRN1.Sigma*pRN1.W[nrWagi].Value +
pRN2.Sigma*pRN2.W[nrWagi].Value;
end;
procedure TRN.SetBlad(pZadana: extended);
begin
Blad.Value := Odp.Value - pZadana;
PokazBlad(True);
end;
3.8 Sieć Kohonena
Sieci samoorganizujące w procesie ucznia spontanicznie tworzą
odwzorowanie (ang. mapping) zbioru sygnałów wejściowych na zbiór sygnałów
wyjściowych. Cechy jakimi musi charakteryzować się sieć samoorganizująca oraz
proces uczenia, to koherentność i kolektywność.
Koherentności jest to efekt grupowania danych wejściowych w klasy
podobieństwa. Grupowanie w klasy podobieństwa opisywane jest przez zestaw
technik matematycznych (w większości przypadków statystycznych) zwanych
analizą skupień (ang. cluster analysis). Wśród technik analizy skupień na uwagę
szczególnie zasługują mechanizmy kwantyzacji wektorowej.
Kolektywność jest to efekt, który zachodzi w sieciach samoorganizujących.
Główne cechy tego mechanizmu to, to że co rozpoznaje jeden neuron, w dużej
mierze zależy także od tego co rozpoznają inne neurony. Ten efekt związany jest
z pojęciem sąsiedztwa.
8
Ogólna zasada uczenia sieci Kohonena opiera się na następujących
założeniach:
wektor sygnałów wejściowych X jest przed procesem uczenia normalizowany ||
X|| = 1, co można zapisać jako
x
x
x
i
j
i
j
v
j
v
n
( )
( )
( )
(
)
2
1
wszystkie neurony sieci dostają ten sam zestaw sygnałów wejściowych
wyliczana jest odpowiedź dla wszystkich neuronów
proces modyfikacji wag następuje w neuronie który zwyciężył w rywalizacji -
posiada największą wartość odpowiedzi
wyliczanie nowej wartości wag dla neuronu który zwyciężył następuje według
poniższego przepisu:
w
w
h m m x
w
i
m j
i
m j
j
i
j
i
m j
( )(
)
( )( )
( )
*
( )
( )( )
( ,
)(
)
1
gdzie:
h(m,m
*
) - jest funkcją określającą sąsiedztwo
(j)
- określa współczynnik uczenia dla (j)-tego kroku
Sąsiedztwo jest to metoda, która pozwala na redukcję niepożądanych
skutków uczenia sieci samoorganizujących w oparciu o konkurencje. Konkurencja
w procesie uczenia może doprowadzić do sytuacji takiej, że tylko niewielki odsetek
neuronów uzyska możliwość rozpoznawania obiektów pokazywanych sieci
(nauczy się). Reszta neuronów nie będzie w trakcie uczenia zmieniać swoich wag
i w ten sposób zatraci na zawsze swe użytkowe cech jako elementy wytrenowanej
sieci neuronowej. Sąsiedztwo jest miarą w jakim stopniu sąsiad neuronu
zwycięskiego będzie miał zmieniane wagi w danym kroku procesu uczenia.
Zwykle wartość tego parametru jest określana na wartość 0 - 1.
Sąsiedztwo rozpatruje się w układach:
jednowymiarowych, neurony sąsiednie leżą na jednej linii,
9

dwuwymiarowych, neurony są ułożone w warstwie a sąsiadami są neurony
położone na lewo i na prawo oraz u góry i u dołu rozpatrywanego neuronu,
inny przypadek opisuje dodatkowe kontakty po przekątnych
wielowymiarowe, neurony ułożone są swobodnie w przestrzeniach
wielowymiarowych a twórca danej sieci określa zasady sąsiedztwa.
Do najbardziej istotnych i użytecznych układów sąsiedztwa zaliczamy
organizacje jedno- i dwuwymiarowe, dla nich właśnie dodatkowym istotnym
parametrem jest określenie ile neuronów obok (sąsiadów z lewej, prawej itd.) ma
podlegać uczeniu w przypadku zwycięstwa danego neuronu.
Po raz pierwszy opracowania na temat sieci samoorganizujących z
konkurencją i sąsiedztwem pojawiły się w latach 70-tych za przyczyną opisów
eksperymentów fińskiego badacza Kohonena. Stąd też tego typu sieci wraz z
metodami uczenia nazywamy sieciami Kohonena. [13,14,15]
W naszym programie przedstawiamy przykład procesu uczenia sieci
Kohonena rozpoznawania zadanej przez użytkownika figury geometrycznej. Po
każdorazowym cyklu prezentacji określonej ilości losowych punktów następuje
automatyczny test skuteczności sieci w rozpoznawaniu danej figury.
struktury danych algorytmu:
alfa0, alfa1 - parametry określające szybkość procesu uczenia sieci
(parametr modyfikacji wag w kolejnych krokach uczenia);
epsAlfa - określa o ile ma się zmieniać wartość alfa0 oraz alfa1 w kolejnych
krokach uczenia (po każdej prezentacji);
sąsiedztwo - parametr określający ile neuronów na się uczyć wraz z
neuronem zwycięskim;
epsSasiedztwo - określa o ile ma się zmieniać wartość „sąsiedztwo” w
kolejnych krokach uczenia (po każdej prezentacji);
0

m, n - rozmiar sieci (sieć ma konstrukcję obszaru o długości m na n
neuronów);
MaxI - ilość prezentacji w epoce uczenia;
uczenie sieci Kohonene:
iInc := 1;
while iInc < MaxI do
begin
x := 5.0 - 10.0*Random;
y := 5.0 - 10.0*Random;
{ PokazPunkt - i dobry i zły }
if not „punkt należy do obszaru figury” then
continue
else
begin { uczenie dla dobrego punktu }
OdlMin := 10000.0;
imin := 1; jmin := 1;
{ obliczanie maksymalnej odpowiedzi sieci }
for i := 1 to m do
for j := 1 to n do
begin
odl := sqrt(sqr(w[i,j,0]-x) + sqr(w[i,j,1]-y));
if odl >= OdlMin then
continue;
OdlMin := odl; imin := i; jmin := j;
end;
{ ustawianie wag zwycięskiego neuronu oraz wag jego
sąsiadów - parametr sąsiedztwo}
s := sasiedztwo;
for i := imin-s to imin+s do
for j := jmin-s to jmin+s do
1

begin
odl := Max(Abs(i-imin),Abs(j-jmin));
{ obliczenie parametru modyfikacji wag )
alfa := (alfa0*(s-odl) + alfa1*odl)/s
w[i,j,0] := w[i,j,0] + alfa*(x-w[i,j,0]);
w[i,j,1] := w[i,j,1] + alfa*(y-w[i,j,1]);
end;
{ zmiana parametrów uczenia }
alfa0 := alfa0*epsAlfa;
alfa1 := alfa1*epsAlfa;
sasiedztwo := (sasiedztwo-1.0)*epsSasiedztwo + 1.0;
Inc(iInc);
end; { koniec pętli uczącej }
3.9 Samouczenie sieci neuronowej
W przypadku gdy sieć nie może być uczona pod nadzorem nauczyciela
poczytne miejsce zajmują strategie uczenia oparte na idei wprowadzonej do
dziedziny neuropsychologii przez amerykańskiego badacza D.O. Hebba w 1949
roku. [16] Jednak ta idea znaczenia dla dziedziny sieci neuronowych zaistniała
naprawdę w 1981 roku kiedy to inny badacz Sutton opracował formalne metody
wykorzystania jej w uczeniu sieci neuronowych. Opracowana technika uczenia
zwykle nazywana jest uczeniem Hebba lub uczeniem bez nauczyciela (ang.
unsupervised lerning albo hebbian learning). Zasada tego uczenia polega na tym,
że waga
,
)
(m
i
w
i-tego wejścia m-tego neuronu wzrasta podczas prezentacji j-tego
wektora wejściowego
)
( j
X proporcjonalnie do iloczynu i-tej składowej sygnału
wejściowego
)
( j
i
x docierającego do rozważanej synapsy i sygnału wyjściowego
)
( j
m
y rozważanego neuronu. Opis formalny tego w postaci wzoru wygląda
następująco:
2

)
(
)
(
)
)(
(
)
1
)(
(
j
m
j
i
j
m
i
j
m
i
y
x
w
w
przy czym oczywiście
n
i
j
i
j
m
i
j
m
x
w
y
1
)
(
)
)(
(
)
(
Indeksy górne przy wagach neuronu
)
)(
(
j
m
i
w
z jednej strony określają
numerację neuronów, do którego wagi należą (m) z drugiej zaś numerację kroków
określających kolejne pokazy.
Jeśli pokusić się o intuicyjną interpretację samouczenia sieci to można to
określić jako stwierdzenie: „wzmocnieniu ulegają w niej te wagi, które są aktywne
(duże
)
( j
i
x ) w sytuacji, gdy „ich” neuron jest pobudzony (duże
)
( j
m
y )”. Tego też
wynika, że sieci uczona taką strategią należy do klasy sieci autoasocjacyjnych.
Stosując prawa Hebba jako regułę uczenia uzyskuje się takie dopasowanie
wag aby korelacja pomiędzy sygnałem wejściowym a zapamiętanym w formie wag
wzorcem sygnału, na który dany neuron ma reagować. Stąd nazwa klasy takich
strategii uczenia określana mianem uczenie korelacyjne (ang. correlation
learning).
Sieć swoje działanie opiera na grupowaniu sygnałów wejściowych w klasy
podobieństwa (ang. cluster) w trakcie procesu uczenia, by następnie
nadchodzące sygnały klasyfikować pod względem podobieństwa do określonej
klasy (dany neuron – reprezentant klasy – posiada największą wartość wyjscia).
Nasz program zawiera przykład, który obrazuje uczenie sieci neuronowej
oparte o strategię reguł Hebba. Pozwala on w sposób krokowy bądź ciągły (cykle
prezentacji sygnału wejściowego) obserwować zmiany wartości wag
dwuwejściowych neuronów rzutowane na płaszczyznę.
struktury danych algorytmu:
3

LN
- liczna neuronów w sieci
eta
- współczynnik uczenia
lPokaz - liczba pokazów sygnału uczącego wykonanych w danej ćwiartce
układu współrzędnych
lNeuron - liczba neuronów które w bieżącym kroku znajdują się w danej
ćwiartce układu współrzędnych
cbxCiasno - przełącznik czy wagi początkowe mają być losowane z
przedziału [-2,2] czy [-10,10] wokół losowego punktu startowego
wagi - tablica wag rozmiar tablicy jest ustalany przez wartość zmiennej LN,
neurony posiadają po dwa wejścia więc wagi na neuron jest dwie
cbxLosowe - przełącznik czy ćwiartka układu współrzędnych do prezentacji
ma być losowana czy zadana arbitralnie
sygnaly - wektor zawierający współrzędne punktu (sygnału) uczącego sieć
pobudzenie - tablica odpowiedzi neuronów w danym kroku przy ustalonej
tablicy wag oraz zadanym sygnale uczącym
{ ile neuronów będzie uczestniczyć w pokazie }
LN := Trunc(enLiczbaNeuronow.Value);
{ ustalenie początkowej wartości współczynnika uczenia }
eta := 0.1;
{ wyczyszczenie informacji o położeniu neuronów w
odpowiednich ćwiartkach układu współrzędnych }
for i := 1 to 4 do begin
lPokaz[i] := 0; lNeuron[i] := 0;
end;
for i := 1 to LN do
moc[i] := 0.0;
4

{ początkowe wartości wag ułożone wokół punktu startowego
(x,y) }
Randomize;
x := 16.0*Random-8.0;
y := 16.0*Random-8.0;
for i := 1 to LN do
if not cbxCiasno then begin
wagi[i,1] := 20.0*Random-10.0;
wagi[i,2] := 20.0*Random-10.0;
moc[i] := sqr(wagi[i,1]) + sqr(wagi[i,2]);
end
else begin
wagi[i,1] := x-2.0*Random;
wagi[i,2] := y-2.0*Random;
moc[i] := sqr(wagi[i,1]) + sqr(wagi[i,2]);
end;
{ główna pętla losowania punktu uczącego, modyfikacji
wag oraz wizualizacji tego procesu na ekranie }s
while True do
begin
{ wyczyszczenie obrazka }
.....
{ rysunek sieci }
for i := 1 to LN do begin
ix := pbrAuto.XRToPoint(wagi[i,1]);
iy := pbrAuto.YRToPoint(wagi[i,2]);
pbrAuto.Canvas.Polygon([Point(ix-2,iy-2),Point
(ix+2,iy-2),Point(ix+2,iy+2),Point(ix-2,iy+2)]);
end;
{ losowanie ćwiartki lub wskazanie arbitralne przez
użytkownika oraz wylosowanie punktu jako sygnału uczącego
}
5

.....
{ zliczanie liczby pokazow }
.....
{ rysunek sygnału uczącego }
.....
{ wyliczenie pobudzenia neuronów przez wyznaczone
sygnały }
.....
{ określenie maksymalnego pobudzenia }
max := 0.0;
for i := 1 to LN do begin
pobudzenie[i] := wagi[i,1]*sygnaly[1] + wagi[i,2]
*sygnaly[2];
pobudzenie[i] := 4.0*pobudzenie[i]/moc[i];
if pobudzenie[i] > max then
max := pobudzenie[i];
end;
{ zerowanie liczników neuronów dla odpowiednich
ćwiartek układu współrzędnych }
for i := 1 to 4 do lNeuron[i] := 0;
{ samouczenie sieci w oparciu o wyznaczone parametry
pobudzenia }
for i := 1 to LN do begin
{ zapamiętanie starych wartości wag }
wagiOld[i,1] := wagi[i,1];
wagiOld[i,2] := wagi[i,2];
if pobudzenie[i] < 0.2 * max then pobudzenie[i] :=
0.3 * pobudzenie[i];
if pobudzenie[i] < 0.0 then pobudzenie[i] := 0.1 *
pobudzenie[i];
wagi[i,1] := wagi[i,1] + eta * pobudzenie[i] *
(sygnaly[1]-wagi[i,1]);
wagi[i,2] := wagi[i,2] + eta * pobudzenie[i] *
(sygnaly[2]-wagi[i,2]);
moc[i] := moc[i] + Sqr(wagi[i,1]) + Sqr(wagi[i,2]);
6

end;
{ zliczanie liczby neuronów w odpowiednich
ćwiartkach }
.....
{ opisanie legendy uczenia w danym kroku }
WypiszLiczbyPN;
{ zerowanie liczników neuronów dla odpowiednich
ćwiartek układu współrzędnych }
for i := 1 to 4 do lNeuron[i] := 0;
{ rysunek nowych wartości wag oraz obrazowanie
zmiany }
.....
{ rysunek zmiany }
.....
{ rysunek starych pozycji w kolorach Czerwonym -
pobudzany i Niebieskim - pobudzany przeciwnie }
.....
{ zliczanie liczby neuronów w odpowiednich
ćwiartkach }
.....
{ opisanie legendy uczenia w danym kroku }
WypiszLiczbyPN;
{ zmniejszenie współczynnika uczenia }
eta := eta * 0.99;
end;
7

3.10 Sieć Hopfielda
Sieci Hopfielda są najczęściej stosowaną podklasą sieci neuronowych
wykorzystywanych w praktyce. Zostały one zdefiniowane w historycznej pracy
tego badacza, której publikacja w 1982 roku stała się punktem zwrotnym w
badaniach sieci neuronowych i przywróciła zainteresowanie tymi systemami sferze
dociekań naukowych. Sieci te charakteryzują się występowaniem sprzężeń
zwrotnych. Wszystkie połączenia, które w tej sieci występują są sprzężeniami
zwrotnymi, wszystkie sygnały wyjściowe są wykorzystywane jako wejścia i
wszystkie wejścia do wszystkich neuronów przenoszą sygnały sprzężenia
zwrotnego. W sieciach tych neurony mają nieliniowe charakterystyki:
)
(
)
(
)
(
j
m
j
m
e
y
gdzie
M
i
j
m
j
i
m
i
j
m
x
y
w
e
)
(
)
(
)
(
)
(
)
(
a nieliniowość
)
(e
y
dana jest prostą binarną funkcją
)
(
0
)
(
)
(
0
)
(
)
(
)
(
0
)
(
)
1
(
1
1
m
j
m
m
j
m
j
m
m
j
m
j
m
w
e
gdy
w
e
gdy
y
w
e
gdy
y
Warto przy tym zwrócić uwagę na dwa szczegóły podanych wyżej wzorów.
Otóż po pierwsze, współczynniki wagowe
)
(m
i
w
łączące wyjście i-tego neuronu z
wejściem m-tego neuronu nie zależą od j. Wynika to z faktu, że rozważając sieć
Hopfielda na tym etapie nie dyskutujemy jej uczenia. Zakładamy, że wartości
)
(m
i
w
zostały wcześniej ustalone za pomocą jakiegoś algorytmu ( najczęściej
przyjmuje się tu algorytm Hebba) i obecnie nie podlegają zmianom. Numer j
oznacza natomiast chwilę czasową, określającą w jakim momencie procesu
dynamicznego następującego pop pobudzeniu sieci obecnie się znajdujemy.
Zagadnienie to będzie niżej dokładnie dyskutowane. Po drugie sumowanie
sygnałów wyjściowych
)
( j
i
y z poszczególnych neuronów w wzorze definiującym
8

łączne pobudzenie
)
( j
m
e odbywa się po wszystkich elementach
M
i
czyli po
wszystkich elementach sieci. Oznacza to, że w sieci przewidziane są także
połączenia z warstw dalej położonych (wyjściowych) do warstw wcześniejszych -
czyli sprzężenie zwrotne.
Jak było to wcześniej odnotowane, sieć o takim schemacie połączeń
nazywana jest siecią autoasocjacyjną. W ramach tego sprzężenia każdy neuron
jest także połączony jednym z wejść ze swoim własnym wyjściem, zatem zasada
autoasocjacyjności odnosi się także do pojedynczych neuronów. Każdy neuron
sieci ma także kontakt z pewnym, odpowiadającym mu sygnałem wejściowym
)
( j
m
x
, zatem zaciera się tu podział na warstwę wejściową i pozostałe warstwy sieci.
Procesy zachodzące w sieciach Hopfielda są zawsze stabilne. Stabilność
procesów w sieci Hopfielda osiągnięto dzięki:
wprowadzeniu bardzo regularnej struktury wewnętrzną sieci - w całej sieci
neurony są łączone na zasadzie "każdy z każdym";
zabronione są sprzężenia zwrotne obejmujących pojedynczy neuron.
wprowadzane współczynniki wagowe muszą być symetryczne - to znaczy jeśli
połączenie od neuronu o numerze x do neuronu o numerze y charakteryzuje
się pewnym współczynnikiem wagi w, to dokładnie taką samą wartość w ma
współczynnik wagowy połączenia biegnącego od neuronu o numerze y do
neuronu o numerze x.
Z siecią Hopfielda kojarzy się tzw. „funkcje energii” (nazwa ta ma charakter
czysto umowny – nie jest związana z rzeczywistą energią), zwaną też funkcją
Lapunowa. Funkcja ta opisuje zbiór stanów sieci Hopfielda, zdefiniowanych przez
zbiór wartości wyjść elementów przetwarzających tejże sieci. Można udowodnić,
ze funkcja taka, dla sieci Hopfielda w skończonej ilości kroków osiągnie swoje
minimum lokalne oraz że jest to funkcja nierosnąca w czasie – co jest
równoznaczne ze stwierdzeniem, że procesy zachodzące w sieci Hopfielda są
procesami stabilnymi.
9

Łatwość budowy i stosowania sieci Hopfielda powoduje, że są one bardzo
popularne. Znajdują one liczne zastosowania - między innymi przy rozwiązywaniu
zadań optymalizacji, a także przy generacji określonych sekwencji sygnałów,
następujących po sobie w pewnej kolejności. Pozwala to za pomocą takich sieci
tworzyć i wysyłać do różnych obiektów sygnały sterujące. Sieci Hopfielda mogą
także pracować jako tzw. pamięci autoasocjacyjne.
Koncepcja pamięci autoasocjacyjnej wiąże się z jedną z podstawowych
funkcji mózgu – z odtwarzaniem całości informacji na podstawie informacji
niepełnej. Jest to zdolność sieci do prawidłowego zinterpretowania danych
zniekształconych lub niekompletnych. Sieć pracująca jako pamięć
autoasocjacyjna może także usuwać zakłócenia i zniekształcenia różnych
sygnałów - także wtedy, gdy stopień „zaszumienia” sygnału wejściowego wyklucza
praktyczne użycie jakichkolwiek innych metod filtracji.
struktury danych algorytmu:
Wagi – wektor wag neuronów w sieci
Wzorzec – wektor wzorców rozpoznawanych przez sieć
rozM - rozmiar sieci - poziomo (domyślnie 25)
rozN rozmiar sieci - pionowo (domyślnie 25)
nMax – ilość neuronów w sieci
Użyta w programie procedura TabNaWzorzec przepisuje do wzorca wartość
elementy tymczasowego, procedura WzorzecNaTab działa dokładnie odwrotnie.
for k := 1 to 16 do
if tZrB[k] then begin
Inc(nElem);
if nrWzorca = k then nrWz := nElem;
TabNaWzorzec(tZr[k],Wzorzec[nElem]);
end;
0

if nrWz = 0 then
Exit;
( ustawinie wag sieci }
for k := 1 to nMax do begin
for i := 1 to k-1 do begin
Wagi[k,i] := 0;
for j := 1 to nElem do
Wagi[k,i] := Wagi[k,i] + (Wzorzec[j,k]*Wzorzec
[j,i]);
Wagi[i,k] := Wagi[k,i];
end;
end;
Randomize;
{ przpisanie wzorca 1 do wzorca 2 i wprowadzenie zmian dla
wzorca 2}
for i := 0 to 25 do
for j := 0 to 25 do
tOdp[2,i,j] := tOdp[1,i,j];
for i := 1 to Trunc(enZmPkt.Value) do begin
j := Trunc(rozM*Random);
k := Trunc(rozN*Random);
tOdp[2,j,k] := 1 - tOdp[2,j,k];
end;
{przerysowanie ekranu}
.....
{ przepisanie zmienionego wzorca do obszaru roboczego }
TabNaWzorzec(tOdp[2],Wzorzec[21]);
TabNaWzorzec(tOdp[2],Wzorzec[22]);
Licz1 := 0; Licz2 := 0;
{ rozpoznawanie }
1

repeat
for i := 1 to nMax do
Wyj[i] := Wzorzec[21,i];
{ oblicznie odpowiedzi sieci }
for i := 1 to nMax do begin
wy := 0;
for j := 1 to nMax do
if i <> j then
wy := wy + (Wyj[j]*Wagi[j,i]);
if wy > 0 then
Wyj2[i] := 1;
if wy < 0 then
Wyj2[i] := -1;
if wy = 0 then
Wyj2[i] := Wyj[i];
end;
{ oblicznie różnic i ustawienie liczników }
rozn1 := 0; rozn2 := 0;
for i := 1 to nMax do begin
if Wyj2[i] <> Wzorzec[22,i] then
Inc(rozn2);
Wzorzec[22,i] := Wyj[i];
Wzorzec[23,i] := -1;
if Wyj2[i] <> Wyj[i] then begin
Inc(rozn1);
Wzorzec[23,i] := 1;
end;
Wyj[i] := Wyj2[i];
Wzorzec[21,i] := Wyj[i];
2

end;
if rozn1 = 0 then Inc(Licz1);
if rozn2 = 0 then Inc(Licz2);
{ rysuneki i opisy kroku rozpoznania }
if (Licz1 < 2) and (Licz2 < 3) then begin
Inc(iKrok);
WzorzecNaTab(Wzorzec[21],tOdp[iKrok]);
WzorzecNaTab(Wzorzec[23],tRoz[iKrok-2]);
{wyrysowanie kroku rozpoznawania na ekranie}
end;
until (Licz1 = 2) or (Licz2 = 3) or (iKrok = 49);
3

4 Opis środowiska Delphi jako przykład narzędzia
typu RAD
Obecnie warsztat projektanta - programisty zdominowały narzędzia
programistyczne umownie nazywane RAD. Skrót ów utworzony jest od nazwy
ang. Rapid Application Development co w tłumaczeniu na język polski oznacza
Szybkie tworzenie aplikacji.
O środowiskach programistycznych tego typu wywodzących się z
generatorów programów zwykło się mówić, że odciążyły one projektanta (w
zasadzie tak niewiele jest programowania w RAD’ach, większość czynności to
właśnie projektowanie) tak, że przestało być trudne konstruowanie całej otoczki
(tzw. interfejs użytkownika) głównej logiki programu, a całość prac związanych z
powstawaniem aplikacji (prototypu) skoncentrowała się na „konsultowaniu”
procesu tworzenia programu.
Praca programisty – projektanta przeniosła się ze sfery żmudnego
tworzenia interfejsu użytkownika na poziom dostarczania logiki, która skłania ten
interfejs do wykonywania produktywnych działań.
Jednym z ważnych środowisk programistycznych należących do klasy
narzędzi typu RAD jest rodzina produktów firmy Inprise znanych pod nazwą
handlową Delphi.
Nasz dydaktyczno - symulacyjny program komputerowy napisany został w
środowisku programistycznym Delphi 3.0.
4.1 Charakterystyka środowiska
Delphi 3 jest produktem firmy Inprise (dawniej Borland). Jest to środowisko
do szybkiego i uproszczonego dla programisty tworzenia aplikacji użytkowych
działających w systemie Windows.
Środowisko Delphi działa w oparciu o język programowania Pascal.
4

4.1.1 Język programowania: Pascal (zarys)
Pascal jest dziełem umysłu Niclausa Wirtha - programisty (również
prowadził zajęcia dydaktyczne na Uniwersytecie Stanforda, a później w ETH na
Politechnice w Zurychu), który potrzebował języka, za pomocą którego mógłby
uczyć innych ludzi pisania czegoś innego niż kilometrowych programów. Stworzył
coś, co teraz jest znane jako standard Pascal; nieco ograniczony język do
tworzenia małych aplikacji zaprojektowany w latach 1970-1971.
Pascal jest pochodną PL1 (Język programowania 1) i ALGOLU
(ALGOrytmiczny język). Pascal otrzymał nazwę na cześć Blaise Pascala –
francuskiego matematyka, który w roku 1690, mając zaledwie 18 lat, zbudował
pierwszą mechaniczną maszynę liczącą.
Jedną z głównych cech pierwszej wersji Pascala było to, że używany
kompilator wymagał bardzo małej pamięci. Kiedy w końcu lat siedemdziesiątych
na scenie zaczęły pojawiać się pierwsze mikrokomputery, wiele instytucji
edukacyjnych wybrało Pascal do nauki programowania na tych maszynach.
Następna wersja Pascala (UCSD Pascal) była nieco silniejsza. Pozwalała
ona programistom na tworzenie dojrzałych aplikacji, a nie tylko małych programów
użytkowych, do czego Wirth początkowo przeznaczył Pascala.
Kiedy w roku 1984 Borland wprowadził Turbo Pascala, środowisko
programistów rzeczywiście go zauważyło. Produkt ten charakteryzował się bardzo
wysokimi osiągami jeśli chodzi o czas kompilacji.
Następnym krokiem Borlanda było wprowadzenie wersji Pascala pod
Windows. W niedługim czasie notacja zaproponowana przez Wirtha została
rozszerzona o specyfikację obiektową. Ten zabieg dokonany pod koniec lat
osiemdziesiątych dał nową jakość, bądź co bądź lekko już wiekowemu
rozwiązaniu jakim był Pascal Wirtha.
I właśnie ten już obiektowy, rozbudowany o potężne mechanizmy
wspomagania projektowania język a właściwie środowisko z rdzeniem jakim
pozostały język programowania Pascal.
5
4.1.2 Środowisko RAD: Delphi
Jak już było nadmienione Delphi, a w szczególności jego wersja 3.0
zasadza się na języku programowania Pascal z mechanizmami obiektowymi
(Inprise preferuję nazwę ObjectPascal). Jest to już w tym momencie narzędzie
Windows 95/98/NT w pełni 32 bitowe (np. posiada „prawie ciągłą” przestrzeń
adresową - o segmencie około 4 miliardy adresów itp.).
Poniższy rysunek przedstawia środowisko Delphi z otwartą do pracy
aplikacją „PNeuron 1.0” (tak nazywa się program komputerowy, przedmiot
niniejszego opracowania):
Środowisko pracy programisty przedstawione na rysunku zwane IDE (ang.
Integrated Development Environment – zintegrowane środowisko tworzenia
aplikacji) jest podzielone na trzy obszary funkcjonalne:
6
Pasek
Główny formularz aplikacji
Pasek szybkości (ang. Speed Bar) – dzieli się na trzy sekcję: menu w którym
zgrupowane są opcje i narzędzia całego środowiska, zbiór przycisków
(graficznie dość wyraźnie się odróżniających) z lewej strony – są to
standardowe mechanizmy związane z ogólną obsługą realizowanego projektu
(otwarcie pliku, otwarcie projektu, nowy formularz, nowy moduł, uruchom,
praca korkowa, zatrzymaj itd.), zbiór zakładek i przycisków z prawej strony
zawierający komponenty dołączone z pakietem Delphi oraz wytwarzane przez
programistę na potrzeby projektów (bardzo istotne jest to, że nie są one
związane z konkretnym projektem, ale stanowią bibliotekę gotowych,
sprawdzonych mechanizmów i procedur możliwych do wykorzystanie w innych
przedsięwzięciach),
Kontroler obiektu (ang. Object Inspector) – każdy element ze zbioru
komponentów jest obiektem, który zgodnie z definicją udostępnia jakichś
zasób cech stałych (ang. Properies) oraz funkcjonalności, które w momencie
użycia (wytworzenia instancji) powinny być zainicjowane i właśnie do tego ma
służyć kontroler obiektu,
Formularz z edytorem kodu (ang. Form & Code Edior) - formularz jest to obiekt
z rodziny GUI (ang. Graphical User Interface – graficzny interfejs użytkownika),
na który zgodnie z projektem nakładane są odpowiednie komponenty, które to
stanowią kręgosłup i krwioobieg logiki działania okna, formularza czy całej
aplikacji (programu); edytor kodu pozwala na wpisywanie procedur
składających się na program a nie koniecznie powiązanych z dostępnymi
komponentami, tam też można zobaczyć jak dodawanie komponentów
modyfikuję istniejący kod programu w języku ObjectPascal.
Oczywiście to co jest widoczne na rysunku oraz zostało opisane powyższym
wypunktowaniem nie stanowi jeszcze pełnego zakresu mechanizmów Delphi.
Obok podstawowego IDE istnieje cała gama dodatkowych elementów
wspomagających proces tworzenia aplikacji np. BDE (ang. Borland Database
Engine – mechanizmy obsługi baz danych), SQL (ang. Structured Query
Language) – język strukturalnych zapytań do baza danych, cała sfera
funkcjonalności związanych obsługą sieci lokalnych (LAN) itd.
7
Kontroler
obiektu

4.1.3 Komponenty – nowa jakość w programowaniu
Jak opisywaliśmy w poprzednim punkcie w Delphi powstała nowa jakość
związana z tworzeniem kodu programu: są nią komponenty. Są one
magazynowane w bibliotekach komponentów VCL (ang. Visual Component
Library – wizualne obiekty Delphi) oczekując tam na użycie w aplikacji.
Coraz częściej można się spotkać z twierdzeniem, że tworzenie aplikacji w
Dephi nie polega na kodowaniu ale na pozyskiwaniu, katalogowaniu oraz
wykorzystywaniu gotowych elementów programu: komponentów. Takie
postawienie sprawy pozwala projektantowi przy wsparciu „bibliotekarza” (osoba
lub instytucja zajmująca się doradztwem w zakresie bibliotek komponentów)
naprawdę skupić się na konstrukcji logiki prototypu a później aplikacji.
Wśród zakresu różnorodności komponentów można wyróżnić bardzo proste
- napisy (obiekt z dość pokaźną ilością właściwości związanych np. z położeniem,
rozmiarem, kolorem itp.), pola do wprowadzania danych poprzez całe gotowe
okna (np. okno typu About – opis o programie) aż do wysoce skomplikowanych
oraz zaawansowanych technologicznie części lub całych serwerów internetowych
stron WWW.
4.1.4 Mocne i słabe strony Delphi
Delphi jest potężnym narzędziem dla większości aplikacji, jakie obecnie
powstają w zakresie szeroko rozumianej informatyki. Jest to z pewnością właściwe
narzędzie dla sekcji interfejsu użytkownika dowolnej aplikacji. Tu właśnie można
zaznaczyć, że Delphi doskonale nadaje się do wykonywanie programów
symulacyjno – dydaktycznych takich jak w celu tej pracy. Składa się na to:
łatwość oraz wysoki poziom efektowności konstruowanych oknie aplikacji,
doskonały język programowania ObjectPascal (oparty o sztandarowy język
algorytmiczny Pascal z rozszerzeniami w kierunku obiektowości) pozwalający
w sposób z jednej strony formalny, zaś z drugiej wysoce wydajny oddać sferę
logiki części symulacyjnej,
8

dobrze przemyślane i wykonane przez firmę Inprise środowisko dla tworzenia
oraz późniejszego uruchamiania aplikacji.
Jak widać Delphi dostarcza wielu bardzo efektywnych mechanizmów i
funkcjonalności dla tworzenia aplikacji dla systemu Windows.
Niestety nie jest i raczej nie powinno to być jedyne narzędzie znajdujące się
w zakresie wykorzystanie dla współczesnego, czynnego projektanta –
programisty.
Bardzo duża elastyczność, która czyni Delphi tak wielkim narzędziem
ogólnego przeznaczenia, nie pozwala dostarczyć tych, których potrzebuje twórca
DBMS (ang. Database Management System – systemy zarządzania bazą danych)
dla stworzenia dużego oraz kompleksowego sytemu.
9

5 Prezentacja programu komputerowego
W tym rozdziale opiszemy sposób posługiwania się edukacyjnym
programem komputerowym. Określimy zakres zmian oraz znaczenie
poszczególnych parametrów udostępnionych użytkownikowi w kolejnych
modułach. Parametry te umożliwiają: określić wartości wagi oraz wejście neuronu
czy prostej sieci, ustawiać parametry procesu uczenia sieci, testować
wytrenowaną sieć itp.
5.1 Opis konstrukcji programu
Dydaktyczno - symulacyjny program komputerowy realizujący stawiany w
temacie pracy cel, zbudowany jest na zasadzie podziału na odrębne, aczkolwiek
wspólne w sferze konstrukcji oraz obsługi, obszary tematyczne odpowiadające
przykładom prezentowanych zagadnień sieci neuronowych. Staraliśmy się
ujednolicić obsługę jak i konstrukcję aplikacji. Z jednej strony było to podyktowane
wybranym środowiskiem Windows 95 (lub Windows NT) i narzędziem
implementacyjnym Delphi 3.0. Z drugiej zaś chodziło nam aby określony parametr,
cecha sieci neuronowej bądź aspekt procesu uczenie lub testowania dla
wszystkich przypadków był ujednolicony.
5.2 Poszczególne moduły programu komputerowego
5.2.1 Moduł pierwszy - Prezentacja neuronu
Przykład zaimplementowany w module pierwszym pozwala zrozumieć
procesy które zachodzą w sztucznym neuronie. Taki neuron charakteryzuje się
następującymi cechami:
wektorem wag – w programie jest udostępniony do modyfikacji przez
użytkownika pięcioelementowy zbiór pól edycyjnych zgrupowanych w sekcję
Wagi neuronu widoczną na poniższym rysunku:
0
wektor sygnałów wejściowych – jest to zestaw sygnałów jakie będą podawane
na wejście neuronu w przykładzie zestaw ów zgrupowany jest w sekcję
Sygnały wejściowe – udostępnione są tam pola do zadawania wartości –
obszar jest widoczny na poniższym rysunku:
parametry pracy neuronu – zestaw danych informujący w jaki sposób
neuron przetworzył wektor sygnałów wejściowych przez wektor wag aż
do wyliczenia odpowiedzi jako wartości funkcji aktywacji. Neuron posiada
możliwość (modelowo) odpowiedzi w wartościach dwóch funkcji
aktywacyjnych: ciągłej funkcji sigmoidalnej oraz dyskretnej, unipolarnej
funkcji binarnej. Dla funkcji sigmoidalnej użytkownik może określić
parametr
przez wprowadzenie odpowiedniej wartości w pole Lambda.
Wyliczane przez program wartości: moc sygnału wejściowego, moc
śladu pamięciowego (wagi neuronu), łączne pobudzenie, wartości ciągłej
funkcji aktywacji, wartość binarnej funkcji aktywacji są zgrupowane w
1
Wartości
wektora wag
Kolejne numery
wag w wektorze
Wartości wektora
sygnałów
Kolejne numery
wag w wektorze
sekcję Parametry pracy neuronu. Opisane informacje można zobaczyć
na załączonych poniżej rysunkach:
Wszystkie powyższe sekcje są umieszczone na oknie stworzonym do
prezentacji oraz symulacji działania pojedynczego, sztucznego neuronu który w
swej definicji prezentacyjnej posiada odpowiedzi właściwe zarówno dla neuronów
liniowych (Łączne pobudzenie) jak i neuronów z nieliniową funkcją aktywacji
(Ciągła funkcja aktywacji, Binarna funkcja aktywacji). Czyli użytkownik może
zaobserwować działanie jakby trzech różnych neuronów, które mając takie same
wejście oraz wagi ale różne elementy odpowiadające za „jakość” pracy,
odpowiedzi.
Ekran zawierający główne okno modułu Prezentacja pojedynczego neuronu
załączony został na poniższym rysunku:
2
Moc sygnału
Moc śladu
Łączne pobudzenie
Wartość odpowiedzi
Wartość
(lambda) –
Na powyższym oknie są umieszczone dwa przyciski operacyjne: Przelicz
oraz Zeruj. Po wprowadzeniu wartości w sekcjach Sygnały wejściowe, Wagi
neuronu oraz Lambda należy użyć przycisku Przelicz w celu obliczenia odpowiedzi
neuronu zgrupowanej w sekcji Parametry pracy neuronu. Zadaniem przycisku
Zeruj jest ustawienie prezentacji w jej stanie początkowym.
5.2.2 Moduł drugi - Prosta sieć neuronowa (z WAT)
Przykład składa się z dwóch ekranów znajdujących się pod dwoma
zakładkami - „Określenie sieci” i „Testowanie sieci”.
3
Przyciski

Ekran „Określenie sieci” zawiera opis pięciu cech oraz trzech neuronów, dla
których użytkownik ma możliwość edytowania i modyfikacji poszczególnych wag
jak i skojarzonych z poszczególnymi wagami cech.
Cechy określamy dla wszystkich obiektów - neuronów. Co jest widoczne na
umieszczonym poniżej rysunku pól zgrupowanych w sekcję Informacje o cechach.
Określenie cechy polega na nazwaniu wejścia neuronu tzn. określamy, że
pierwsze wejście będzie stanowić o ilości nóg rozpoznawanego obiektu, tak
ustanowiona uwaga pozwala nam na odpowiednie konstruowanie wag
odpowiednich neuronów jak i podawanie w sposób oczywisty parametrów dla
badanych obiektów.
4
Następnie dla każdej klasy obiektów określamy jej cech indywidualne. Np.
jako cechę wybieramy ilość nóg, klasy obiekty to ssak - ma 4 nogi, ptak - 2 nogi,
płaz - brak (0) nóg, co zapisujemy jako bezpośrednie wartości poszczególnych
neuronów A, B, C.
Dla każdego neuronu automatycznie wyliczana jest jego moc zestawu wag
– co inaczej jest nazywane moc śladu pamięciowego.
Po określeniu parametrów sieci użytkownik może przejść do jej testowania
(zakładka „Testowanie sieci”).
5
Numer
porządkowy
Nazwa cech -
dla wszystkich
klas obiektów
Nazwa klasy
obiektów
rozpoznawanych
przez neuron
Wartości
określające
posiadane przez
obiekty klasy -

Na ekranie testowania sieci użytkownika określa sygnał testowy (dane dla
badanego obiektu skojarzone z jego cechami), po czym testuje sieć. Sieć podaje
odpowiedź dla zdefiniowanego przez użytkownika obiektu i wskazuje, który z
neuronów rozpoznał testowany obiekt. Wyznaczane przez sieć wartości to moc
sygnału wejściowego, odpowiedzi ilościowe każdego z neuronów, klasyfikacja
jakościowa odpowiedzi – porównanie z zadanym progiem poprawnej klasyfikacji,
wskazanie jednego (WTA) obiektu najlepiej pasującego swoimi wagami do
wektora sygnałów wejściowych oraz spełniającego wymogi jakości klasyfikacji
(ponad próg).
5.2.3 Moduł trzeci - Uczenie pojedynczego neuronu
Moduł ten ilustruje uczenie neuronu o charakterystyce liniowej, o 5
wejściach.
6
Użytkownik ma w tym przykładzie do dyspozycji 2 ekrany, znajdujące się
pod odpowiednimi zakładkami – ekran wczytywania ciągu uczącego oraz ekran
nauki i testowania neuronu. Na pierwszym ekranie użytkownik określa jaki jest
ciąg uczący użyty do uczenia sieci.
W tym celu może wykonać jedną z poniższych operacji:
może otworzyć (ikona koperty w górnej części ekranu) jeden z przygotowanych
ciągów uczących
może wygenerować własny ciąg uczący (przycisk „Generuj” w górnej części
ekranu)
7
Przyciski

Plik wczytany do edytora może być przez użytkownika dowolnie
modyfikowany i zapisywany. Format pliku jest stały, następują w nim po sobie
(wielokrotnie powtórzone):
linia komentarza (rozpoczynająca się średnikiem)
5 liczb będących sygnałami wejściowymi
sygnał wyjściowy
Po wczytaniu ciągu uczącego (i ewentualnym naniesieniu na nim poprawek)
użytkownik ma możliwość użycia tego ciągu do uczenia i testowania sieci. W tym
celu należy wybrać zakładkę „Uczenie i testowanie” w dolnej części ekranu.
Na oknie Uczenia i testowania użytkownik może uczyć neuron
(jednorazowe użycie przycisku „Uczenie neuronu” jest równoznaczne z podaniem
na wejście sieci jednego elementu wybranego ciągu uczącego „),
8

a również może w dowolnym momencie przeprowadzić test neuronu
(określając poszczególne wejścia i naciskając przycisk „Testowanie neuronu” ).
Wtedy dla określonych przez użytkownika sygnałów wejściowych neuron
wyliczy sygnał wyjściowy.
5.2.4 Moduł czwarty - Uczenie prostej sieci
Przykład ten obrazuje proces uczenia prostej liniowej sieci neuronowej.
Zaprojektowaliśmy dla tego przykładu ciąg zawarty w pliku uczący_s.ctg.
Struktura sieci jest stała i użytkownik nie może jej zmieniać. Ciąg uczący ma
następującą strukturę:
;komentarz
9
zestaw sygnałów wejściowych
wzorcowy zestaw sygnałów wyjściowych
W zestawie sygnałów wejściowych podawane będą pięcioelementowe
wektory (porcje po pięć sygnałów dla pięciu wejść rozważanego neuronu), zaś
wzorcowych sygnałów jest 3.
Podobnie jak w poprzednim przykładzie użytkownik programu pracuje na
dwóch oknach – na pierwszym wczytuje i modyfikuje ciąg uczący, na drugim uczy
i testuje działanie sieci.
0
Przyciski:

Konstrukcja tego przykładu jest bardzo zbliżona do przykładu poprzedniego.
Na pierwszym ekranie użytkownik pracuje z ciągiem uczącym (podobnie jak w
poprzednim przykładzie może go wczytać z pliku bądź wygenerować i
zmodyfikować). Po zakończeniu pracy z ciągiem uczącym użytkownik przechodzi
do etapu uczenia i testowania.
Na oknie uczenia i testowania użytkownik może uczyć sieć (jednorazowe
użycie przycisku „Uczenie sieci” jest równoznaczne z podaniem na wejście sieci
jednego elementu ciągu uczącego), a również może w dowolnym momencie
przeprowadzić test sieci (określając poszczególne wejścia i naciskając przycisk
„Testowanie sieci” ).
1

Test sieci polega na tym, że dla określonych przez użytkownika wejść sieci
sieć wylicza wszystkie sygnały wyjściowe.
5.2.5 Moduł piąty - Sieć neuronowa jako filtr sygnału z zakłóceniami
Przykład ten prezentuje działanie sieci neuronowej stanowiącej
autoasocjacyjny filtr sygnałów z zakłóceniami. Okno prezentacyjne posiada dwie
zakładki a co za tym idzie dwa ekrany robocze: Ciąg uczący oraz Uczenie sieci –
wykresy. Operacje na ekranie Uczenie sieci – wykresy możliwe jest dopiero po
określeniu ciągu uczącego: wygenerowaniu nowego lub wczytani wcześniej
przygotowanego w pliku tekstowym (istotne jest aby plik posiadał rozszerzenie .
cgn)
2

Po wskazaniu zakładki Ciąg uczący otrzymujemy obrazek jak na poniższym
rysunku:
Okno to zawiera listę na której są umieszczone przyciski oraz kontrolki
operacyjne. Przycisk Generuj służy do automatycznego wygenerowania ciągu
uczącego (zawiera on sygnał sinusoidy jako sygnał wzorcowy oraz jego losowo
zakłócony obraz). Przycisk Wczytaj pozwala powtórnie wczytać zawartość
wskazanego pliku z ciągiem uczącym. Przycisk otwarcia pliku powoduje
wywołanie okna dla wybierania „Plik z ciągami uczącymi”. Znajduje się tu również
pole z nazwą pliku, pasek określający postęp przeprowadzanej czynności
(wczytywanie pliki, generacja nowego ciągu uczącego) oraz duży edytor
zawierający obraz wczytanego lub wygenerowanego ciągu z danymi do uczenia i
testowania sieci neuronowej.
3
Wybrany ciąg może zostać przegenerowany przez użytkownika (na tym
etapie użytkownik ma możliwość dowolnej modyfikacji ciągu testowego – np. w
edytorze Notepad.exe), a następnie jest wczytywany do
Okno do wyboru pliku z ciągiem uczącym, jeśli wprowadzimy tu nazwę
nieistniejącego pliku a następnie wykonamy operację Generuj nastąpi utworzenie
nowego pliku z ciągiem uczącym o podanej nazwie.
4
Nazwa pliku, pasek
Przyc
Następnym etapem jest przystąpienie do uczenia oraz testowania sieci
neuronowej co możemy wykonać przełączając okno na ekran skojarzony z
zakładką Uczenie sieci – wykresy. Po wybraniu akcji przerysowania wykresu
(przycisk Przerysuj) otrzymujemy obraz jak na rysunku poniżej:
5
Nazwa pliku (może być
Lista

Ekran ten zawiera duże pole do prezentacji wykresów oraz standardowo
listę z narzędziami dostępnymi w tej części prezentacji. Możliwe operacje to
wskazanie parametrów dla akcji Przerysuj (przełączniki: sygnał wzorcowy, sygnał
zaszumiony, sygnał przefiltrowany – kolory tych przełączników odpowiadają
odpowiednim krzywym i łamanym na wykresie), wykonanie akcji Przerysuj – co
można wykonywać po dowolnej ilości kroków uczących przez co łatwym staje się
proces podglądania postępu uczenia oraz jego jakości. Następną bardzo istotną
częścią listwy operacji jest klasa parametrów i funkcji związanych z procesem
uczenia sieci neuronowej filtrowania sygnału zakłóconego. Do tej grupy należą:
parametr ile kroków – poprzez ustawienie tego parametru określamy ile pełnych
prezentacji ciągu uczącego ma zostać wykonana w danym cyklu treningu,
przełącznik waga środkowa – pozwala wprowadzić do procesu zadawania
początkowych (losowych) wag neuronów ustaloną wartość na środku wag (w
naszym wypadku na wadze numer 3) wartość stałą dla wszystkich neuronów
równą 1, parametr współczynnik – jest to wartość określająca szybkość uczenia
6
(im większy typ proces uczenia jest bardziej forsowny – wagi w każdym kroku są
mocno modyfikowane).
Listwa narzędziowa sekcji Uczenie sieci – wykresy jest zobrazowana na
poniższym rysunku:
Po ustaleniu tych wartość możemy przystąpić do uczenia poprzez wybór
przycisku Ucz sieć. zakończenie procesu uczenia obrazowane zatrzymaniem się
zmian wartości pola wykonany krok na liczbie ilości kroków do wykonanie pozwala
nam wykonać funkcję przerysowania przez co możemy ocenić jakość
przeprowadzonego procesu uczenia.
Złożenie wykresów po wykonanym procesie uczenia (parametry: wykonane
kroki uczące w ilości 3, współczynnik postępu uczenia równy 0,15, bez wagi
środkowej) obrazuje poniższy rysunek:
7
Parametry oraz
Akcja „Ucz sieć”
oraz jej parametry:
ilość kroków, waga
Pole rysowania wykresów,
pasek postępu akcji: Przerysuj
oraz Ucz sieć, pole Kroki

Ja łatwo zaobserwować dobre efekty przy filtrowaniu zakłóconych (nie za
mocno) sygnałów można otrzymać przy użyciu bardzo prostej sieci liniowej –
jedna warstwa oraz bardzo krótkim procesie uczenia – 3 iteracje pokazowe.
(Uwaga: wszystkie okienka tej prezentacji są wykonywane na tym samym
zestawie ciągu uczącego)
5.2.6 Moduł szósty - Rozpoznawanie obrazu
Moduł zawiera mechanizmy pozwalające skonstruować prostą figurę płaską
złożoną z nakładających się kół, następnie określić jak zbudowana jest sieć
neuronowa (ile i jak licznych warstw ukrytych posiada), dla tej sieci umożliwia
prowadzenie przyrostowego procesu uczenia (użytkownik podaje ile ma być
wykonanych prezentacji ciągu uczącego, złożonego z losowo wybieranych
punktów z określonego wcześniej obrazka) każdy etap (epoka) procesu uczenie
kończy się wizualizacją możliwości sieci w rozpoznawaniu powyższego obrazka.
8

Tempem uczenia użytkownik steruje poprzez ustalenie początkowych wartości
parametrów uczenia:
(eta) oraz (alfa).
Obszar roboczy jaki dostaje użytkownik po wybraniu modułu
Rozpoznawanie obrazów wygląda jak na poniższym rysunku.
Dla tego okna wyróżniamy obszar w dolnej części ekranu (około 2/3)
zawierający elementy związane z prowadzonym przez użytkownika procesem
uczenia i testowania wielowarstwowej, nieliniowej sieci neuronowej
zaimplementowanej w typ programie. Górna część wygląda jak poniższy rysunek
9
oraz zawiera następujące grupy funkcjonalności (są one wymienione w
kolejności jak użytkownik powinien jej określać i używać):
Definicja figury płaskiej – określenie musi zawierać (przynajmniej jej fragment)
figurę na płaszczyźnie w kwadracie ograniczonym punktami (-5,-5) – (5,5);
można zdefiniować maksymalnie (również nakładające się na siebie) trzy koła;
w przypadku określenia koła o promieniu R równym zero lub koła nie
zawierającego się we wskazanym kwadracie nie będzie ono miało wpływu na
uczenia a tym samym nie będzie rozpoznawane przez nauczoną sieć
neuronową; po określeniu trzech kół (zaznaczone przełączniki „okrąg 1..3”)
można przystąpić do następnego etapu definicji warunków symulacji –
określenie sieci neuronowej;
Określenie struktury sieci neuronowej i początkowych parametrów uczenia – w
tym module została zaimplementowana, wielowarstwowa sieć neuronowa dla
której użytkownik definiuje ilość neuronów w dwóch warstwach ukrytych
(warstwa wejściowa arbitralnie zawiera dwa neurony, zaś warstwa wyjściowa –
jedne); maksymalna ilość neuronów w warstwach ukrytych wynosi; jeśli
0
Gęstość
Definicj
Określenie struktury
sieci neuronowej oraz
początkowych
Ilość pokazów (Kroków
ucznia) i uruchomienie
Obszar
prowadzenia

określone zostanie zero lub brak neuronów w warstwie ukrytej to użytkownik
rezygnuje z jej istnienia w tej instancji sieci neuronowej; w skrajnym wypadku
sieć składa się z dwu neuronów wejściowych i jednego wyjściowego; następnie
można zmodyfikować wartości parametrów: intensywności eta oraz zależności
od wyników poprzednich kroków – alfa; kolejnym etapem jest naprzemienne
wykonywanie w dwóch poniższych punktach
Gęstość próbkowania losowego wyznaczania ciągu uczącego – użytkownik
może określić krok (siatkę próbkowania) z jakim losowane będą kolejne
elementy ciągu uczącego danej epoki; położenie suwaka w skrajnie górnym
położeniu jest to ustawienie największego oka siatki próbkowania; po
ustawieniu w skrajnie dolnym położeniu próbkowanie zachodzi w sposób ciągły
(no może jest zakłócone to dyskretną reprezentacją liczby zmiennopozycyjnej
w komputerze);
Ilość pokazów (Kroków ucznia) i uruchomienie (również zatrzymanie- na
żądanie) procesu uczenia – w tym kroku użytkownik określa ile ma być
wykonanych losowań punktów uczących w jednej epoce; następnie należy
uruchomić akcję (przycisk) Ucz sieć; napis na tym samym przycisku (dla dużej
ilości kroków i wolnego komputera) zmienia się na Stop – to aby można było
przerwać uczenie w dowolnej chwili; po zakończeniu uczenia nastąpi
automatyczne testowanie sieci poprzez zapełnienie kolejnego wolnego
obszaru testowego ekranu prezentacji (2/3 od dołu).
W czasie procesu uczenia użytkownik ustala kolejne epoki (ich liczebność) i
następuje automatyczne testowanie w postaci wyrysowania przez program
aktualnych umiejętności sieci. Użytkownik ma możliwość również prowadzenia
eksperymentów z generowaniem pokazów o określonej gradacji poprzez użycie
do tego udostępnionego suwaka zmiany kroku próbkowania. Na załączonym
poniżej rysunku widać prowadzony proces kolejnych iteracji uczenia i testowani:
1

Jak można zauważyć z tych eksperymentów wielowarstwowe sieci
nieliniowe stanowią - nawet w tak prostej konstrukcji, jakim dysponuje użytkownik
w tym module do dwóch warstw ukrytych, do dziewięciu neuronów w każdej z
niech – potężne, wydajne i stosunkowo proste w konstrukcji i uczeniu środowisko
równoległego przetwarzania danych a co za tym idzie i jak w tym przykładzie
skutecznego rozpoznawania obrazów.
2
5.2.7 Moduł siódmy - Backpropagation - najpopularniejsza metoda uczenia
liniowych sieci neuronowych
Backpropagation to najpopularniejsza metoda uczenia sieci
wielowarstwowych. Umożliwia ona w takich oszacowanie błędów warstw
pośrednich, oraz uczenie tych warstw poprzez rzutowanie błędów poszczególnych
warstw sieci na warstwy poprzednie.
Program pokazuje szczegółowo działanie sieci złożonej z czterech
neuronów tworzących trzy warstwy - wejściową, nie podlegającą uczeniu (w dolnej
części ekranu), wyjściową, której sygnały będą podlegały uczeniu (w górnej
części ekranu) oraz warstwę ukrytą, w centralnej części ekranu.
Użytkownik ma do dyspozycji 2 ekrany, znajdujące się pod dwiema
zakładkami – „Działanie sieci” oraz „Uczenie sieci””
Działanie sieci wielowarstwowych
Wybierając zakładkę „Działanie sieci” użytkownik programu ma możliwość
zapoznać się z działaniem sieci warstwowej składającej się z 2 wejść, 2 neuronów
w warstwie ukrytej i 2 neuronów w warstwie wyjściowej.
Program ustala współczynniki wagowe dla wszystkich neuronów w całej
sieci. Użytkownik ma możliwość modyfikacji parametrów sieci, ale tylko gdy
przełącznik „ustaw parametry sieci” na ekranie pokazującym uczenie sieci nie jest
zaznaczony.
3
Przyciski
Krok oraz

Po prawidłowym określeniu parametrów (i zaznaczeniu przełącznika) sieci
użytkownik może zacząć prezentację. Kolejne kroki prezentacji są uruchamiane
poprzez wybranie myszką przycisku „Krok”.
Pierwszym krokiem jest obliczenie iloczynów sygnałów wejściowych oraz
wag warstwy ukrytej, drugim obliczenie odpowiedzi warstwy ukrytej, a kolejnym.
Wszystkie wyliczane w tych krokach parametry są kolejno umieszczane na oknie
programu.
Poniżej prezentujemy zrzut ekranu z tego etapu pracy programu.
Ostatnim etapem prezentacji jest wyliczenie odpowiedzi warstwy
wyjściowej. Po zakończeniu prezentacji użytkownik może przystąpić do uczenia
sieci metodą backpropagation.
4

Uczenia sieci wielowarstwowych – Backpropagation
W tym celu należy wybrać zakładkę „Uczenie sieci –
BACKPROPAGATION”. Na pierwszym ekranie tego przykładu pokazana jest
struktura sieci (analogiczna jak w poprzedniej prezentacji) oraz początkowe
(zainicjowane losowo) wartości wag neuronów warstwy ukrytej i wyjściowej.
Użytkownik może modyfikować współczynnik (learning rate) oraz
momentum.
Współczynnik uczenia musi być wybierany z dużą rozwagą, gdyż zarówno
zbyt duża, jak i zbyt mała jego wartość źle wpływa na przebieg procesu uczenia.
Zbyt mała wartość tego współczynnika powoduje, że uzcenie się sieci jest bardzo
długotrwałe (wagi są poprawiane w każdym kroku bardzo słabo, żeby więc
osiągnęły pożądane wartości trzeba wykonać bardzo dużo takich kroków). Z kolei
wybór za dużego współczynnika uczenia powoduje bardzo gwałtowne zmiany
5
parametrów sieci, które w krańcowym przypadku prowadzić mogą nawet do
niestabilności procesu uczenia
Drugi współczynnik - momentum - określa stopień "konserwatyzmu"
procesu uczenia. Określa on stopień zależności zmian wag od zmian
stosowanych w procesie uczenia na poprzednim wzorcu. Im większa wartość
współczynnika momentum, tym bardziej stabilny i bezpieczny jest proces uczenia
- chociaż zbyt duża wartość może prowadzić do trudności z wykryciem przez sieć
najlepszych (optymalnych) wartości współczynników wagowych dla wszystkich
wchodzących w grę neuronów.
Po podaniu współczynników oraz wartości obydwu sygnałów wejściowych,
jakie sieć ma otrzymać na swoich wejściach program zaczyna demonstrację. Na
początku pokazuje on tylko strukturę sieci (miejsca, gdzie znajdują się
poszczególne neurony oraz miejsca, gdzie wyświetlone będą poszczególne
sygnały). W górnej części okna wyświetlany jest tytuł „Prezentacja struktury sieci z
wagami”.
6
Przyciski Krok oraz

Po naciśnięciu przycisku Krok, sieć pokazuje wartości sygnałów
wejściowych (podawane z zewnątrz przez neurony wejściowe), a także wartości
współczynników wagowych - dla wszystkich wejść wszystkich neuronów
(wyświetlane w kolorze fioletowym).
Następnie jest wczytywany kolejny element ciągu uczącego (o czym
informuje zmiana tytułu w oknie – na „Nauczyciel podał sygnały wejściowe i
wyjściowe”).
7

K
olejne naciśniecie klawisza „Krok” rozpoczyna proces symulacji
przetwarzania sygnałów w sieci. Początkowo obliczane są odpowiedzi warstwy
wejściowej. W każdej kolejnej warstwie obliczane są i wyświetlane (na niebiesko)
sumy wartości przemnażanych przez odpowiednie wagi sygnałów wejściowych
(wraz ze składnikiem BIAS). Drogi przesyłania tych sygnałów oznaczone są w
postaci niebieskich linii.
8

Po kolejnym naciśnięciu przycisku „Krok”
uruchamiany jest proces symulacji
procesu przesyłania i przetwarzania sygnałów w modelowanej sieci. Początkowo
wyliczane są odpowiedzi warstwy wejściowej (tytuł okna zmienia się na
„Obliczanie odpowiedzi warstwy wejściowej”).W każdej kolejnej warstwie
obliczane są i wyświetlane (na niebiesko) sumy wartości przemnażanych przez
odpowiednie wagi sygnałów wejściowych (wraz ze składnikiem BIAS). Drogi
przesyłania tych sygnałów oznaczone są w postaci niebieskich linii.
Następnie pokazywane są obliczone wartości sygnałów wyjściowych
poszczególnych neuronów, powstałych po przepuszczeniu zsumowanych
sygnałów wejściowych przez funkcję przejścia neurony. Potem odpowiedzi
neuronów niższej warstwy stają się wejściami dla neuronów wyższej warstwy.
9

W momencie, gdy sieć (jako całość) popełni błąd - obliczane są błędy
poszczególnych neuronów. Najpierw wyznaczane są wartości błędów dla
wyjściowych neuronów sieci. Potem błędy te przeliczane są na odpowiadające im
wartości na wejściach neuronów.
00

Po wyznaczeniu wartości błędów dla wszystkich neuronów w sieci - kolejny
krok programu prowadzi do wyznaczenia nowych (poprawionych) wartości
współczynników wag w całej sieci. (patrz rysunek poniżej). Potem następuje
kolejna iteracja procesu uczenia.
01

Zaprezentowany moduł przedstawia w szczegółowy i czytelny dla
użytkownika sposób przebieg sygnałów w sieciach neuronowych.
5.2.8 Moduł ósmy - Sieć Kohonena
Moduł prezentuje model sieci Kohonena, której zadaniem będzie nauczenie
się rozpoznawania wskazanej figury geometrycznej. Dla określonej struktury sieci
(podano ile sieć prostokątna zawiera elementów na krawędzi poziomej oraz
pionowej) należy ustawić parametry: szybkości uczenia, zakresu sąsiedztwa,
zmiany szybkości uczenia oraz zakresu sąsiedztwa wraz z kolejnymi
prezentacjami, ilość prezentacji losowych punktów figury, której rozpoznawania na
się nauczyć szkolona sieć Kohonena.
02

Główne okno modułu, na którym wyróżniamy w górnej części sekcje
funkcjonalności sterujących eksperymentem, zaś w dolnej są umieszczone
obszary, na których będą prezentowane efekty kolejnych etapów prowadzonych
symulacji.
Ekran okna głównego modułu jest umieszczony na rysunku poniżej:
Jak już wcześniej wspominaliśmy, w górnej części powyższego ekranu
znajduje się sekcja funkcjonalności sterujących procesem definicji rozpoznawanej
figury poprzez określenie struktury sieci samoorganizującej Kohonena, aż po
ustalenie parametrów procesu uczenia oraz sterowanie kolejnymi etapami uczenia
i testowania i otrzymywanych wyników. Mechanizmy ustalania warunków i
parametrów przeprowadzania eksperymentu znajdują się na poniższym rysunku:
03
gdzie możemy wyróżnić następujące sekcje funkcjonalności:
Wybór figury geometrycznej – użytkownik wskazuje tu w polu przełącznika
radiowego (ang. radio-set) jedną z dostępnych tam figur: kwadrat, trójkąt,
krzyż, koło, gwiazda, elipsa; po wyborze następuje w obszarze obok (biały
kwadrat) następuje wizualizacja wskazanej figury, która w dalszej części
eksperymentu będzie podlegała najpierw uczeniu przez sieć a później
rozpoznawaniu (testowaniu),
Określenie struktury sieci Kohonena oraz „rozrzutu” wag początkowych –
strukturę sieci użytkownik może określić jako pewnego rodzaju sieć płaską
opartą o konstrukcję prostokąta: podawana jest ilość neuronów na boku i
podstawie prostokąta; istotnym dla późniejszego procesu uczenia parametrem
jest rozrzut (trzecie pole edycyjne – wartość rzeczywista), który to mające małą
„
ustaloną wartość”
określa, że początkowe wagi są losowane z przedziału
[-
ustalona wartość, ustalona wartość
] przez co użytkownik może sterować
„rozrzutem” struktury sieci odwzorowanej na płaszczyźnie w czerwonych
kwadracikach połączonych przez szarymi kreseczkami obrazującymi najbliższe
sąsiedztwo;
Określenie parametrów uczenia sieci – użytkownik może określić tu wartości
początkowe parametrów sterujących procesem uczenia: Alfa0, Alfa1, Eps
(Alfa), Sąsiedztwo, Eps(Sąsiedztwo) – znaczenie tych parametrów wyjaśnia
wstęp teoretyczny i zamieszczony algorytm uczenia dla tego przykładu,
04
Wybó
Określenie parametrów
uczenia sieci
Określenie struktury
sieci Kohonena oraz
Sterowani

Sterowanie procesem uczenia i testowania – użytkownik określa ile kroków
(losowań) musi zostać wykonana dla danego etapu uczenia, po typ procesie
następuje automatyczne odrysowanie struktury sieci (sieć wag na następnym
wolnym obszarze prezentacji); każda epoka może mieć inną liczebność co
użytkownik definiuje przed naciśnięciem Ucz sieć; na obszarze po prawej
stronie (biały kwadrat na wysokości przycisku Ucz sieć) wizualizowany jest
proces losowania punktów z epoki uczącej; poniżej przycisku znajduje się
pasek postępu procesu oraz pole informacyjne pokazujące ile pozostało
losowań do końca procesu uczenia; użytkownik może przerwać w każdej chwili
proces uczenia poprzez wciśnięcie przycisku Ucz sieć który kontekstowo przy
trwającym procesie uczenia zmienia swój opis i znaczenia na Stop.
Ekran prezentujący etap określenia figury geometrycznej do rozpoznawania
oraz definicji struktury sieci (została określona jako prostokąt o boku sześciu
neuronów oraz postawie piętnastu neuronów) znajduje się na poniższym rysunku:
Ekran po dziewięciu krokach uczenia i testowania jest pokazany na
kolejnym rysunku:
05

Zaimplementowany przez nas moduł prezentujący zasadza się na idei
samoorganizującej mapie podobieństwa cech, generowanych w sieci neuronowej
Kohonena w trakcie procesu uczenia. [15]
5.2.9 Moduł dziewiąty - Samouczenie sieci neuronowej
Moduł prezentuje procesy jakie zachodzą w sieciach neuronowych w czasie
przeprowadzanie uczenia bez nadzoru według reguł podanych przez Hebba.
Model sieci oparty jest na neuronie posiadającym dwa wejścia przez co można
taki neuron zobrazować w postaci punktu na płaszczyźnie układu współrzędnych.
W momencie wylosowania punktu odpowiadającego sygnałowi uczącemu
następuje pokazanie go na ekranie – duży kwadrat. Następnie obrazowany jest
proces samouczenia sieci poprzez odrysowanie starych i nowych wag, uczonych
na plus przy pomocy koloru czerwono – czarnego oraz neuronów którym wagi
modyfikowane są na minus – kolorem niebieskim.
06

Moduł zawiera okna gdzie w większej części po lewej stronie umiejscowiony
,jest obszar układu współrzędnych (z naniesionymi osiami współrzędnych)
prezentacji neuronów (punkty o współrzędnych odpowiadających wagom
neuronów), z prawej strony u góry znajdują się przyciski, pola edycyjne oraz
suwak sterujący pracą symulacji procesu samouczenia, z prawej stronie u dołu
znajduje się legenda zawierająca informacje o ilości pokazów i neuronów
znajdujących się w poszczególnych ćwiartkach płaszczyzny symulacyjnej.
Poniższy rysunek obrazuje wygląd ekranu przed rozpoczęciem procesu
samouczenia:
Sekcja okna widoczna na poniższym rysunku zawiera następujące
parametry udostępnione użytkownikowi celem inicjacji oraz sterowania procesem
samouczenia:
07
Pięć grup elementów udostępnionych dla sterowania procesem symulacji
zawiera następujące mechanizmy:
Przycisk uruchomienia i zatrzymania symulacji – rozdziela on w sposób
operacyjny etap definicji struktury sieci oraz właściwego procesu prezentacji
samouczenia
Parametry definiujące początkową strukturę sieci – użytkownik określa tu ile
neuronów w sieci będzie poddawane procesowi uczenia; przełącznik czy
generacja początkowych wartości wag ma odbywać się w przedziale [-2,2] –
skupione czy te [-10,10] wokół losowego punktu startowego
Informacje o przebiegu samouczenia – (eta) – parametr określający tempo
procesu samouczenia (wielkość zmian wag w kolejnych krokach), iteracje –
ilość wykonanych pokazów w procesie samouczenia
Określenie sposobu generacji sygnałów uczących – losowe pokazy –
generacja sygnału z wybranej arbitralnie ćwiartki układu współrzędnych lub
całości udostępnianej do symulacji płaszczyzny (od punktu [-10,-10] do
[10,10]), ćwiartka oraz grupa przełączników {1,2,3,4} – pozwala na arbitralne
wskazanie ćwiartki w której ma być prezentowany jedynie punkt sygnału
uczącego
Sterowanie tempem procesu symulacji – umieszczenie suwaka w lewym
skrajnym położeniu wyłącza opóźnienie, przesuwanie się w prawą stronę
powoduje wzrost przerw pomiędzy kolejnymi krokami symulacji aż do
08
Przycisk
Parametry
Informacja
Określenie sposobu
Sterowanie
pojawienia się przycisku Krok – prawe skrajne położenie – który umożliwia
pracę krokową symulacji; ten element jest widoczny na rysunku poniżej, który
zawiera legendę wraz ze statystyką prowadzonego procesu uczenia:
Rysunek następny zawiera krok procesu samouczenia zdefiniowanej sieci
neuronowej:
09
Informacja o ilości
wykonanych prezentacji
sygnałów uczących oraz
ilość neuronów w
Legenda objaśniająca
znaczenie powyższego
obszaru informacyjnego
Sterowanie
tempem

Powyższy moduł prezentuje najistotniejsze cechy procesu samouczenia
opartego na regułach Hebba wykorzystujące możliwości nowoczesnego narzędzia
programistycznego.
5.2.10 Moduł dziesiąty - Sieć Hopfielda
Pamięcią asocjacyjną nazywamy zdolność sieci do prawidłowego
zinterpretowania danych zniekształconych lub niekompletnych. Sieć taka może
także usuwać zakłócenia i zniekształcenia różnych sygnałów - także wtedy, gdy
stopień „zaszumienia” sygnału wejściowego wyklucza praktyczne użycie
jakichkolwiek innych metod filtracji
Moduł prezentuje model sieci Hopfielda pracującej jako pamięć
autasocjacyjna.
Zadaniem będzie zapamiętywanie i odtwarzanie prostych obrazów.
Sieć potrafi odtworzyć pierwotny wzorzec na podstawie sygnału silnie
zniekształconego lub zakłóconego, działa więc jako pamięć asocjacyjna.
10
Użytkownik podaje sieci ciąg wzorców, a następnie wygenerowany sygnał zbliżony
do jednego z tych wzorców.
Zadaniem sieci jest rozpoznanie wybranego wzorca („podobnego” do
sygnału na wejściu).
Poniżej prezentujemy ekran początkowy programu – przed wprowadzeniem
wzorców przez użytkownika.
Pierwszym krokiem użytkownika przy pracy z programem jest określenie
wzorców, które program ma rozpoznawać.
Ciąg wzorców może być generowany przez użytkownika automatycznie lub
manualnie.
11
Legenda
wzorców,

Przy generacji automatycznej użytkownik ma możliwość określenia czy chce
generować ciąg wzorców (przycisk „Generuj wzorce” w górnej części okna
programu).
losowych
ortogonalnych (w stosunku do ostatniego z wprowadzonych wcześniej
manualnie wzorców)
ortogonalnych z inwersją (w stosunku do ostatniego z wprowadzonych
wcześniej manualnie wzorców)
Przy manualnej generacji (klikając na „Numer wzorca” użytkownik ma
możliwość wejść do okna edycji wzorca) wzorca użytkownik określa, które punkty
w matrycy wzorca są zapalone, a które „wygaszone”. Istnieje też możliwość
przepisania znaku z klawiatury bezpośrednio do matrycy - należy w tym celu
wprowadzić znak do pola edycyjnego i nacisnąć przycisk „Przepisz”.
12
Poniżej prezentujemy zrzut okna edycji wzorca.
Za pomocą przycisku „Inwersja” użytkownik ma możliwość wygenerowania
wzorca „odwrotnego” od poprzednio wprowadzonego. Check-box „Użyj definicji
symbolu” określa czy dany wzorzec jest wykorzystywany przez sieć, czy tez nie.
Dodatkowo użytkownik programu ma możliwość edycji i wprowadzenia
zmian na dowolnym ze wzorców (przycisk „Numer wzorca” pod wzorcem) oraz
przepisania ciągu wzorców z łańcuchu znaków (przycisk „Przepisz wzorce” w
górnej części okna programu ).
Po zbudowaniu ciągu wzorców użytkownik wybiera jeden z nich (klikając
dwukrotnie na tym wzorcu) i zaburza go w określonej przez siebie liczbie punktów.
13
Przyciski
uruchamiające
edycję symbolu

Proces rozpoznawania uruchamiany jest za pomocą przycisku „Rozpoznaj”.
Kolejne kroki procesu rozpoznawania obrazu są przedstawiane w matrycach w
dolnej części okna programu.
W edytorze w centralnej części ekranu wyświetlane są parametry
rozpoznawania – iloczyn skalarny oraz odległość Hamminga (ilość punktów w
których sygnały się różnią) pomiędzy zaburzonym wzorcem, a kolejnym krokiem
rozpoznawania wzorca.
Poniżej prezentujemy zrzut ekranu, na którym sieć w sposób prawidłowy
rozpoznała zaburzony wzorzec.
Sieć może nie być w stanie rozpoznać wzorca w sposób prawidłowy.
Wiąże się to z tzw. efektem „przesłuchów” występującym gdy podane
wzorce są do siebie podobne. Przy podobnych wzorcach ślady pamięciowe
bardziej nakładają się na siebie. Jeśli jednak są bardzo podobne, to ich zapisy w
postaci składników wag poszczególnych neuronów tak bardzo mieszają się, że w
14

gotowej sieci zaczyna być problematyczne prawidłowe odtworzenie
któregokolwiek z zapamiętanych obrazów
Dlatego uzasadnione i sensowne jest korzystanie z ciągu wzorców
różniących się od siebie w stopniu jak największym. Taką właśnie rolę spełnia
generacja ciągu wzorców ortogonalnych – dla takich wzorców sieć wykazuje
mniejszą „wrażliwość na podobieństwo wzorców”.
Poniżej zrzut ekranu z sytuacji, gdy rozpoznanie nie zakończyło się
powodzeniem
Zjawisko odtwarzania poprawnych obrazów z bardzo mocno zakłóconych
wzorców w sieci Hopfilelda zapamiętującej ortogonalne sygnały też ma swoje
granice. Jeśli zostanie zniekształcony zbyt mocno - nastąpi bezpowrotna utrata
możliwości jego odtworzenia.
Poniżej – prawidłowe rozpoznanie wzorca zakłóconego w 14 punktach – dla
wzorców ortogonalnych.
15

Powyższy moduł prezentuje najistotniejsze cechy sieci Hopfielda pracującej
jako pamięć autoasocjacyjna.
16

6 Podsumowanie
6.1 Wnioski
Opracowana przez nas dydaktyczno - symulacyjna aplikacja komputerowa
może być wykorzystywana przez osoby, które prowadzą zajęcia związane z
szeroko rozumianą sferą sztucznych sieci neuronowych, stanowić będzie wtedy
bardzo pomocny element pokazujący praktyczne aspekty wykładanych zagadnień
teoretycznych. Pozwala „namacalnie” przekonać się o możliwościach,
różnorodności oraz elementach mających wpływ na konstrukcję, uczenie,
testowanie oraz wykorzystywanie sztucznych sieci neuronowych.
Dla osób samokształcących się w temacie sieci neuronowych nasza
aplikacja stanowić może bardzo ciekawą ofertę, która z jednej strony pomoże
zrozumieć konstrukcję oraz działanie sieci neuronowych zaś z drugiej strony
stanowi szeroki pomost pomiędzy wiedzą teoretyczną (zawartą w Pomocy) a
praktycznymi aspektami jej implementacji i wykorzystania. Istotą tego mariażu jest
skumulowanie w jednym miejscu - programie komputerowym - tych dwu aspektów
dydaktyki: wiedzy teoretycznej bezpośrednio przekładającej się na symulację i
propozycję praktycznego wykorzystania.
6.2 Propozycje dalszej ewolucji programu
Przyszłe rozwijanie naszego programu może być ukierunkowane na
następujące ścieżki ewolucji:
można wprowadzać do zaimplementowanych modułów nowe parametry w celu
bardziej szczegółowego oddania sfery symulacyjnej zagadnienia np. w
przypadku konstrukcji sieci Kohonena można dodać bardziej wyrafinowaną
funkcję określającą sąsiedztwo;
17
można dodawać nowe zagadnienia, które chcielibyśmy włączyć do kanonu
uczenia przy pomocy tej aplikacji np. można dołączyć bardzo ciekawy aspekt
dwuetapowego uczenia sieci typu Counter Propagation;
wykorzystanie nowszego środowiska programistycznego - może to dać np.
efekt bardziej intuicyjnego przedstawienia prezentowanych zagadnień
związanych z sieciami neuronowymi;
osobnym zagadnieniem jest rozwijanie Pomocy do programu, zarówno
poprzez uszczegółowienie istniejących tematów jak i poprzez dodanie nowych.
18

7 Literatura
1.
Ryszard Tadeusiewicz, „Sieci Neuronowe”, Państwowa Oficyna Wydawnicza
RM 1993
2.
Timothy Masters, „Sieci neuronowe w praktyce”, Wydawnictwa Naukowo –
Techniczne 1996
3.
J. Żurada, M. Barski, W. Jędruch, „Sztuczne Sieci Neuronowe”, Wydawnictwo
Naukowe PWN 1996
4.
J. Korbicz, A. Obuchowicz, D. Uciński, „Sztuczne Sieci Neuronowe – podstawy
i zastosowania”, Akademicka Oficyna Wydawnicza PLJ 1994
5.
W.S. McCulloch, W. Pitts, „A logical calculus of the ideas immanent in nervous
activity”, Bulletin of Mathematica Biophysics, No 5, 1943, pp. 115-133
6.
J. von Neumann, „The Computer and the Brain”, Yale Univ. Press, New Haven,
1958
7.
W.K. Taylor, „Computers and the nervous system. Models and analogues in
biology”, Cambridge Univ. Press, Cambridge, 1960
8.
F. Rosenblatt, „The perceprton. A theory of statistical separability in cognitive
system”, Cornell Aeronautical ab. Inc. Rep. No. VG-1196-G-1, 1968
9.
B. Widrow, M.E. Hoff, „Adaptive switching circuits”, IRE WESCON Convention
Record, New York, 1960, pp. 96-104
10.
B. Widrow, „The Original Adaptive Neural Net Broom-Balancer”, Proceedings
of 1987 IEEE Int. Symp. on Circuits and Systems, Philadelphia, PA, May 1987
pp. 351-357
11.
M. Minsky, S. Papert, „Perceptrons”, MIT Press, Cambridge 1969
12.
J.A. Anderson, E. Rosenfeld, „Neurocomputing – Foundation of Research“,
MIT Press, Cambridge, Mass., 1988
19

13.
T. Kohonen, „Associative Memory: A System – Theoretical Approch”, Springer
– Verlag, Berlin, 1982
14.
T. Kohonen, „Adaptive, associative, and self-organizing functions in neural
computing ”, Appl. Opt., 26(23), 4910-4918, 1987
15.
T. Kohonen, „The self-organizing map”, Proc. IEEE, 78, nr 9, 1494-1480, 1990
16.
D.O. Hebb, „The Organization of Behaviour, a Neuropsychological Theory”,
Wiley, New York, 1949
17.
D. Rutkowska, M. Piliński, L. Rutkowski, „Sieci Neuronowe, Algorytmy
Genetyczne i Systemy Rozmyte“ Wydawnictwo Naukowe PWN 1997
18.
Praca zbiorowa pod redakcją M. Rymarczyka, „Decyzje, Symulacje, Sieci
Neuronowe“, Wydawnictwo Wyższej Szkoły Bankowej w Poznaniu 1997
19.
T.L. McClelland, D.E. Rumelhart, and the PDP Research Group, „Paralell
Distributed Processing“, MIT Press, Cambrideg, Mass. 1986
20

21
Wyszukiwarka
Podobne podstrony:
Praca dyplomowa - Sieci Neuronowe, informatyka, Sieci neuronowe
praca dyplomowa sieci neuronowe, Praca magisterska
praca dyplomowa sieci komputerowe GDOXII4V6BM7D5VEI6ISJKWUIZ3VHR4X7YX6U5I
Praca dyplom sieci
Praca Dyplomowa(2) Sieci Komputerowe, Informatyka
PRACA PRZEJŚCIOWA Zastosowanie sieci neuronowych w zagadnieniu sterowania odwróconym wahadłem
praca dyplomowa(1) rozbudowa szkolnej sieci lan N6OPYMVVG4LMB3BQNAZUMK2IEPOV47JPZS5OBUQ
praca dyplomowa modernizacja sieci lan TKYJZINLKHPPFF22BKJAOGW4N4KKY46E2G2UCTA
praca dyplomooww - Metodyka Tworzenia Stron WWW, komputery, sieci komputerowe
Prezentacja praca dyplom
więcej podobnych podstron